
Abstract
Advances in robotics, artificial intelligence and automation have the potential to transform cities and urban social life. However, robotic restructuring of the city is complicated and contested. Technology is still evolving, robotic infrastructure is expensive and there are technical, trust and safety challenges in bringing robots into dynamic urban environments alongside humans. This article examines the nascent field of ‘urban robotics’ in three emblematic yet diverse national-urban contexts that are leading centres for urban robotic experimentation. Focusing on the experimental application of autonomous social robots, the article explores: (i) the rationale for urban robotic experiments and the interests involved, and (ii) the challenges and outcomes of creating meaningful urban spaces for robotic experimentation. The article makes a distinctive contribution to urban research by illuminating a potentially far-reaching but under-researched area of urban policy. It provides a conceptual framework for mapping and understanding the highly contingent, spatially uneven and socially selective processes of robotic urban experimentation.
Introduction
There is growing interest amongst researchers, technologists and policy-makers in the reimagining and remaking of urban infrastructure and urban social life through advances in robotics and autonomous systems (Del Casino, 2016; Macrorie et al., 2019; Marvin et al., 2018b; Nagenborg, 2018; Royakkers and Van Est, 2015; Tiddi et al., 2019). This is most evident in burgeoning literature on drones, other unmanned aerial vehicles (UAVs) and autonomous vehicles (AVs) (Bissell, 2018; Garrett and Anderson, 2017; Shaw, 2016). However there is a much wider potential application of social robotics in cities as robots replace or supplement tasks currently undertaken by humans, including in policing and security, the delivery of goods and food, maintenance and repair, construction, personal assistance and healthcare. The possibilities for a wider robotic restructuring of the city reflect a new generation of robotics enabled by enhanced artificial intelligence and machine learning, entwined with information gathering and socio-technical platforms that use robotics to augment and re-bundle service infrastructures (e.g. Frank et al., 2018). The potential is reflected in proposals for utopian smart city projects based specifically around AI and robotics, such as the proposed mega-city of Neom in Saudi Arabia (Hassan, 2020) or Toyota’s plans for a smaller-scale Woven City in Japan (McCurry, 2020). Alongside these flagship projects, there is growing pressure for existing cities to open up public spaces for new robotic experiments and applications. There are opportunities for urban robots to enhance and augment urban life (Freudendal-Pedersen et al., 2019), but also potential for negative social impacts in relation to surveillance and social control, job loss (Macrorie et al., 2019) and new forms of infrastructural splintering (cf. Graham and Marvin, 2001). Urban applications of robotics might save money in the long term, but they are also expensive and risky to set up. Visions for the rolling out of robotic urbanism are proliferating and research is urgently required to understand the possibilities, realities and implications of this new phase of urban restructuring.
So far, robotic applications have been in controlled or semi-controlled environments, with relatively limited human interaction and controls to protect human safety. The wider application of urban robotics requires some form of transitional trialling in meaningful real world contexts to test and develop the technology. In this context, the aim of this article is to explore emerging practice in creating space for robots to operate in the public realm of cities (as distinct from robotic applications in more controlled private or semi-private spaces). This domain of robotics has a distinctively urban dimension because of the technological challenges in enabling robotics to negotiate complex environments of people and things, and a distinctively urban governance dimension because of the need to protect human safety and to balance the demands of robotics with the rights of other users of the public realm. The article therefore explores the challenges in making space for robots in specific urban contexts as they become ‘embedded’ into other social structures, arrangements and technologies (Star, 1999). But the article also speaks to academic and policy debates on the politics of urban experimentation (Savini and Bertolini, 2019), and the factors that enable and constrain legislative and regulatory facilitation of new technological or management systems (Fenwick et al., 2017; Hagemann et al., 2018; Marvin et al., 2018a). Robotics adds an important dimension to that literature because of its potentially pervasive future impact – across many aspects of urban economic and social life, above ground and below ground – and particular concerns about health and safety in robotic–human interactions.
The article is structured as follows. The second section examines how developments in robotics are selectively intersecting with the urban agenda, and explores the wider uncertainties about what sort of restructuring this may produce. The third section develops a framework for analysing purposive experimentation with the application of robotic systems to selected dimensions of urban life. The fourth section presents case studies of three sites of early mover urban robotic experimentation in San Francisco, Tokyo and Dubai. The fifth section considers the future research implications for urban studies.
Future cities and urban robotics
Cities have long been shaped by new technologies and technological applications that alter and extend the possibilities for human life (Graham and Marvin, 2001). Urbanisation is inherently ‘cyborg’ (Gandy, 2005) in its combination and co-evolution of the economic, social and technological. Technology and infrastructure augment and alter human functioning and networks. Urban researchers are increasingly interested in the series of urban changes being wrought by robotics and automation (Del Casino, 2016; Kovacic, 2018; Macrorie et al., 2019; Marvin et al., 2018b; Nagenborg, 2018). Potentially, the most far-reaching impact of robotics on urban lives will be the transformation of work and the need for flanking mechanisms to account for mass unemployment, under-employment and social divisions (Davenport and Kirby, 2016). However, the transformation of work and production is only part of a wider process of robotic applications that spans various domains of urban social life. If that is the case, what is distinctive about urban robotics as a technology, what new urban capacities does it develop and how does this capacity become materialised in the urban context?
First, it is important to recognise the systemic combination of robotics and automation (Royakkers and Van Est, 2015). The term Robotics and Autonomous Systems (RAS) is used in engineering to reflect the related and separate domains of robotics and automation (Marvin et al., 2018b). There are aspects of robotics that have nothing to do with automation and there are aspects of automation that do not involve physical robots. Robotics can be defined specifically as the use of programmable machines that are able to carry out a series of actions autonomously, or semi-autonomously. Robots interact with the physical world via sensors and actuators, with autonomy extended increasingly by artificial intelligence. Robotics might be defined as the use of ‘computer software, machines or other technology to carry out a task which would otherwise be done by a human worker’ (Owen-Hill, 2017), but increasingly it is about new forms of human–robotic co-evolution and hybrid augmentation that do not simply replicate or replace the work of humans.
Thus developments in machine learning and artificial intelligence have significantly extended the potential for robotics to engage with and negotiate around humans in dynamic contexts, potentially performing more complicated tasks in a wide range of environments (Sejnowski, 2018). Drones and other autonomous or semi-autonomous UAVs have extended possibilities for rapid service delivery, surveillance, remote policing and mobility. AVs have profound implications for mobility, access to road infrastructure and the design and layout of cities. Assistive and customer service robots in social care, education and retail are altering how citizens experience, interact and learn (Kovacic, 2018; Prescott and Caleb-Solly, 2017). Robots can help manufacture the built environment and repair infrastructures.
There are clear resonances but also important differences between RAS and visions of the smart city (Freudendal-Pederson et al., 2019). Both are predicated on data and computational infrastructures that facilitate enhanced automation of urban management. However, whilst the smart city prioritised issues of data gathering on and data knowledge of the existing urban form, the automated robotic city is about the introduction of new physical capabilities that have the potential radically and fundamentally to alter the design, layout and operation of the city. Whereas the smart city was the focus of large software and computer companies (e.g. IBM, CISCO), urban RAS are arguably constituted by a wider and more diverse range of firms, interests and technologies from the automotive, manufacturing and health sectors. Both the smart city and the automated robotic city represent the application of logics of machine learning and computational control developed outside the urban domain but then applied to the city with limited understanding of the tensions and contradictions that might be produced (Leszczynski, 2016; Taylor-Buck and While, 2017).
Second, within cities there is the potential for more efficient and responsive collective use of existing infrastructure through automation and autonomous systems. Urban surveillance and control are already being transformed by the widespread use of police drones (Shaw, 2016). Shaw (2016), for instance, presents a dystopian view of future developments in swarm robotics, the linking of drones and predictive policing and possibly the arming of police drones. Mobility and urban planning are likely to be transformed through driverless vehicle technology especially if the vehicles are linked to and partially controlled by centralised (and automated) urban control systems (Bissell, 2018). There is considerable interest in the potential to transform urban healthcare through urban technologies of robotics and automation, and robots and drones are being deployed in assisted living strategies and for the delivery of goods into and around cities. Robots can undertake many aspects of routine urban maintenance and construction (Bock and Linner, 2015). As a form of replacement labour ‘robots do not . . . complain, answer back, sue, get sick, go slow, lose concentration, go on strike, demand more wages, worry about conditions, want tea breaks or simply refuse to show up’ (Harvey, 2014: 108).
Urban robotics reflects, then, the coming together of robotic possibilities, technology firms and interests in enhanced forms of urban management. This might be seen as an opportunity to transcend the limits of existing urban management, overcoming the sub-optimality of individualised collective human activity and providing new solutions to old and new problems of turbulence and threat in cities (Marvin et al., 2018b). More critical accounts are concerned about the potential loss of human agency and the centralisation of non-accountable control as power is vested in machine learning and algorithms (Eubanks, 2018; Graham, 2005).
There are considerable challenges in rolling out new forms of RAS in cities. A key issue is that urban robotics is as yet largely untested in the dynamic sphere of urban interaction (Tiddi et al., 2019). Robots have historically been constituted inside controlled spaces of laboratories and factories, largely separated from human bodies and operating at a distance with limited autonomy. Urban robotics raises questions of whether humans and robotics can coexist in the public realm and what sorts of infrastructures and regulations might be required to enable experimental robotic–human symbiosis and co-evolution. Much of the concern has rightly focused on human safety, but there are examples where robots have been vandalised and stolen (Hook, 2018). In summary, research is needed to examine the processes and outcomes of urban RAS applications. The following section links urban robotics more explicitly to literature on urban experimentation.
Robots and urban experimentation
The development of urban robotics requires governments and citizens to create opportunities for meaningful human–robotic interaction. Urban robots need be tested, trialled, developed and demonstrated in real world contexts in ways that resonate with literatures on urban socio-technical experimentation and the processes through which certain cities and urban contexts are actively constructed as ‘strategic’ sites for trialling new technologies (Bulkeley et al., 2016; Caprotti and Cowley, 2017; Evans and Karvonen, 2014; Evans et al., 2016; Savini and Bertolini, 2019). To govern such transitions remains a key challenge for urban policy-makers, planners, and developers and facilitators of new technology (Bulkeley and Castán Broto, 2013; Truffer and Coenen, 2012), requiring supportive changes in regulation, policy and culture. Thus one dimension of the urban socio-technical experiments literature has been to advocate the creation of ‘urban living labs’ to support innovation and learning (Marvin et al., 2018a).
Drawing on literature on urban experiments and living laboratories, we identify three facets that shape the opening up of spaces of urban experiments and which might inform empirical research on urban robotics. First, the creation of experimental urban space requires supportive politics and collective visions that span the relevant public and private interests. However, creating experimental spaces is often challenging and time consuming for regulators and there can be risks in creating spaces that expose citizens to new technology, especially if they are felt to prioritise the private interest. Political and policy rationales might reflect the economic development benefits of being an experimental space for new technologies either within national or local government. Literature has explored the importance of visions in managing expectations and as providing direction to processes of learning (Kemp et al., 1998). Work on urban transitions further shows how shared visions and discourses emerge through articulation and negotiations among parties interested in the imposed changes in an effort ‘to define and categorise the future’ (Hodson et al., 2013), with potential for the co-creation of visions to reshape relations among parties. One critical issue for our research is therefore to examine the visions that underpin advocacy for urban robotic experiments, including whether particular urban problems are positioned as problems for robotic solutions and intervention.
Second, effective action to create meaningful (and replicable) spaces of urban experimentation requires coordinated action by intermediaries who can overcome institutional, regulatory and legislative constraints. Studies of urban infrastructure and of innovation conceptualise intermediaries as both translators and brokers of change linking various parties involved in a system of innovation with new political arrangements that favour the innovation (Van Lente et al., 2003). Intermediation in this context is needed to support innovation and develop links between entities that need to connect in order to generate or adopt innovation, as well as creating new possibilities and dynamism in steering the design of change. Intermediation is also understood as socio-material processes of mediating socio-political priorities and application contexts, different combinations of which generate different approaches to urban transitions (Hodson et al., 2013). Our case studies below examine the social, political and regulatory challenges in creating functional and meaningful space for new urban robotic application.
Third, the idea of configuration refers to the socio-material processes of relating the distinct elements of experimental spaces to one another and circumscribing their scope. Studies in configuration have argued that particular state or spatial arrangements can provide new power relations and alter the flows of legitimacy within and across the local community (Walker and Cass, 2007). Placing new forms of experimentation in urban settings carries the ‘corollary of addressing the public in terms of certain configurations (or reconfigurations) of social relations’ (Walker and Cass, 2007: 467). These experiments encapsulate both formal and informal mechanisms of envisioning, learning and power restructuring in a given place in time through images, narratives and spatial arrangements.
In the following sections, we explore how these factors reflect and shape urban robotic interventions in three significant urban contexts: Tokyo, San Francisco and Dubai.
The three case studies were selected through systematic desk-based surveys of global urban robotic experimentation using a range of academic, policy, corporate and governmental documents and internet sources. The decision was taken to focus on social robots operating on pavements and in public spaces. This excluded the initial wave of driverless car (AV) experiments that have so far been separated from other domains of urban robotics (in terms of experimental spaces and wider robotic visions). Our examples do not include drones and other autonomous aerial vehicles, largely because the commercial operation of UAVs in urban areas was at the time of the research prohibited in most countries due to concerns about public and airspace safety (Jones, 2017).
The case studies were researched through a combination of documentary review and 40 formal interviews with key actors and organisations as part of a wider programme of research on urban robotics and automation. Twenty-one formal and informal interviews were undertaken in California with government personnel, robotics firms and professionals working with and/or employing robots in 2018 in the San Francisco Bay Area. Fourteen interviews were undertaken for the Tokyo case study, with a mix of robotic firms, professionals who employ/work with robots and researchers as part of study visits in Tokyo, Osaka, Kawasaki and Yokohama in 2018 and 2019. Five interviews were undertaken in Dubai with planners, developers and engineers as part of a study visit in October 2017. The analysis broadly follows the analytical framework developed in the previous section of this article where we seek to explore: (i) the rationale for urban robotic experiments and the interests involved, and (ii) the challenges and outcomes of creating meaningful urban spaces for robotic experimentation.
San Francisco: Tech start-ups, pavement politics and urban robotic regulation
The initial geography of robotics development in the USA included centres of innovation in industrial ‘rustbelt’ states such as Ohio, in large part because robotics innovation was driven by application in existing manufacturing and automotive sectors (Florida, 2018). However, the economic geography of robotics innovation in the USA is increasingly shifting to high technology regions, as ‘new and even more automated and easy-to-use robotics technology is developed in leading tech hubs’ (Florida, 2018), often by agile high technology start-up firms. The rapid development of robotics activity in the San Francisco Bay Area of Northern California – with Silicon Valley at its heart – reflects those dynamics, with a proliferation of smaller firms seeking to develop a ‘platform’ of robotic service applications, alongside established high technology firms such as Amazon and Google. New modes of service delivery are an important dimension of Californian robotics innovation, with automated robots replacing humans in the localised delivery of products. Food delivery is a particular area of urban experimentation, reflecting the market opportunities in that sector and the opportunities to find solutions to the ‘last mile’ delivery problem in urban areas.
Across the US, city and state governments have varied in their response to requests from technology firms to create opportunities for real world experimentation with robotics and automated systems. For example, in 2015, the State of Arizona passed an executive order allowing for the testing and piloting of driverless vehicles on selected public roads to attract leading firms in support of economic development, implicitly in competition with California (Neuman, 2018). Experiments with AVs have been highly contentious in many US states and cities, and in Arizona a significant public backlash against driverless cars has included attacks on AV company vehicles and threats against workers for companies such as Waymo (Greene, 2018). The backlash intensified following the death of a woman cyclist after a collision with a driverless Uber vehicle in the city of Tempe, Arizona, in 2018 (Neuman, 2018).
It is possible for states and municipalities to facilitate localised robotics experiments on roads and pavements. But it is less easy for cities to create experimental airspaces for drones, as US commercial drone operations are approved on a case-by-case basis by the Federal Aircraft Authority, which has warned against the proliferation of city drone ordinances that might compromise public and airspace safety. The Integration Pilot Programme of 2017 has opened up space for selected urban drone experiments, but these are within limited geographical zones awarded pilot status by the Federal Government (Federal Aviation Authority, 2019).
The City of San Francisco had banned street robots in 2017 following growing public and political concern about surveillance and control and the intrusion of unregulated experiments with street robots undertaken by small tech firms and tech entrepreneurs. The concern was specifically about the impact on pedestrians of the proliferation of ‘six-wheeled [food delivery] boxes, roughly the size of beer coolers, ambling along city pavements, delivering food and other items’ (Zaleski, 2017) and operated by start-up firms such as Marble. The City of San Francisco initially prohibited bicycles, Segways and delivery robots from pavements because: In San Francisco one of our values is that it’s a walkable city, and that some neighbourhoods have very small pavements, but we want them to be walkable and safe, not only for people that transverse the city [but also] for folks that might be visually impaired, or use a wheelchair or parents with strollers. (Interview, City and County of San Francisco Officer, 19 September 2018)
There was also public resistance in San Francisco to robotic surveillance and control, notably a highly publicised case in 2017 when the San Francisco branch of the Society for the Protection of Cruelty to Animals used a robot to deter homeless people from pavements around its premises (Vincent, 2017). A well-organised public opposition to street robots from community groups in San Francisco drew on a longer history of pedestrian and civil rights activism around public space. Indeed, in 2019 San Francisco was the first US city to ban the use of facial recognition software by the police and other agencies within the City and County (Conger et al., 2019).
Initial experiments in urban robotic service delivery in California tended to be on university and business campuses – including Kiwi’s food delivery robots on the Berkeley campus of the University of California, and Starship on the Intuit Campus, Mountain View. As private jurisdictions, university and private company campuses provide semi-controlled and semi-regulated spaces for robotic experiments. However, the pace of technological development in robotics and automation means that municipal governments in Southern California have come under pressure to open up public space for robotic experiments. Start-up firms and tech interests presented examples of other US cities such as Virginia (Idaho) and Washington DC that had passed legislation to facilitate the use of delivery robots, to argue for a more flexible approach in California, and a number of suburban municipalities in California including Mountain View, Redwood City and San Jose created space for robotic experimentation. Robotic experimentation was perhaps easier to manage in these suburban jurisdictions than in San Francisco because of the simplified (for robots) car-dominated infrastructure, with wider pavements and fewer pedestrians.
Although the restrictive legislation of 2017 prohibited robotic experiments on San Francisco’s streets, the City’s Board of Supervisors has subsequently sought to find ways of supporting commercial robotic experiments through collaborative dialogue between different public and private interests. In December 2017, the regulation was changed to allow companies to apply for a permit to deploy up to three robots in designated zones of the city, and permits restricted to a maximum of nine robots operating in total at any given time (Board of Supervisors. Revised Legislative Digest, file no. 170599; City and County of San Francisco, 2017). San Francisco is divided into Residential, Neighbourhood Commercial, Downtown, Industrial and Mixed Use zoning districts and the robots have been restricted to the industrial zones where there are fewer pedestrians. In mid-2018, the City and County of San Francisco established regulations and guidelines for the use and operation of autonomous delivery devices within the public right-of-way, which required coordinated action across transport regulation and land use planning (San Francisco Public Works, 2018).
Given the rapid pace of robotic experimentation, in 2018 the City of San Francisco established an Emerging Technology Open Working Group to develop a regulatory framework for delivery robots and other emerging urban robotic technologies, covering a broad range of topics, from data privacy and cybersecurity to what kind of legal body should be formed to deal with urban robot regulations. Participants included a wide range of stakeholders, from civic groups such as Elder Care Alliance and San Francisco Council of District Merchants Associations, to companies such as Kiwi, Lyft, Marble, Microsoft, to civil service offices at the City Council and San Francisco Airport. Meeting discussion topics included: how to define ‘emerging technology’; issues of trust between government and companies; moving from reactive to proactive regulations; communication with the public; equitable benefits; accessibility and safety; and data sharing and privacy (City and County of San Francisco, 2019). Specific recommendations in the final report included: creating a central point of contact for companies and the public; improving communication with the community by informing technology companies of best practices for engaging local residents and businesses; a requirement to safety test and evaluate new technologies with clear evaluation criteria; to support responsive policy development in areas such as equity, accessibility, privacy and data ethics; and to foster smart forecasting through expert collaboration (City and County of San Francisco, 2019).
San Francisco is a particularly contested context for development of urban robotic test beds, given the scale of robotic technology experimentation, the city’s symbolic and reputational value as a test bed and its tradition of local political activism in defence of public rights. The context for ‘urban’ robotic regulation and experimentation in California (and the US generally) is changing rapidly, with governments and technology firms negotiating their shared interests. As a result, California is not just a leading centre for urban robotic applications but also a pioneering centre for the emerging regulation of urban robotic experiments – a mutually enforcing process of technological and governmental innovation. Frameworks for responsible innovation in robotic experimentation emerging in San Francisco are a reflection of the particular nature of democratic politics, combining openness to innovation with a questioning of corporate power and protection of the public interest in contested and congested urban space.
Tokyo, the 2020 Olympics and state strategies of robotic restructuring
Urban experimentation with robotics in Japan is part of a proactive government strategy to ‘roboticise’ society as part of national industrial strategy and in response to pressing problems of societal ageing, a shrinking labour force and rising medical and social security costs. The Society 5.0 vision (2016) aims to create a smart and connected society where big data, the Internet, artificial intelligence and robots are ‘totally integrated to provide digital and physical infrastructure for daily life of all citizens’ (MEXT, 2016). The national vision is both techno-economic in terms of enhancing the presence of Japan’s industries in the world economy, and societal in focusing on specific sectors including logistics, transportation, service, banking, healthcare and agriculture. In Japan, urban robotic development is not an outcome of sporadic corporate interests, but a holistic and centralised (geo)political economic agenda, albeit in the initial stages of development.
The Japanese national robotics strategy involves state sponsorship of collaboration with large and small firms and universities as well as cities and municipal agencies, to create the capacity and capability for the development, experimentation and implementation of robotic technologies. Organisations such as the Study Group for Vision for Next Generation Robots (2003), the Working Group on Robot Activities (2005), the Association for Support of Robot Business (2006) and the Robot Revolution Realization Council (2014) oversee associations of private and public sectors, providing strategic funding and regulation to accelerate demonstrations and implementation. Robots have been actively deployed in multiple sites, including department stores, airports, shopping malls, banks, restaurants, hotels and graveyards (Kovacic, 2018).
Importantly, there is a strong urban dimension to the Japanese robotics programme, with different cities specialising in particular technologies, such as the Tokku ‘special national testing zones’ (Weng et al., 2015). These testing zones include drone home delivery in Chiba, drone demonstrations in Minamisoma City and Semboku City and AVs in Yokohama, Fujisawa City and Sendai City. Tokyo is not necessarily a key site in this national programme of urban robotics experiments, in large part because the complexity of the city has made it difficult to create meaningful spaces for robotic experimentation. Nevertheless, Tokyo has become an important demonstrator site because of the opportunities to showcase Japanese robotic technology at the Tokyo 2020 Olympic Games. The Olympics has additional potential for robotic experimentation because host cities are required to create customised, securitised, specially regulated and protected zones and corridors for robotics and automation in managing the smooth flow of officials, competitors and supporters that are amenable to robotics and automation.
The intention is therefore ‘to use [the Tokyo Olympics] to showcase the latest global robotics technology, an industry in which Japan has long been famed as a pioneer’ (Demetriou, 2014). Experimental spaces include: (i) a robot testing platform at Haneda Airport with robots for cleaning, information services, language translation and luggage transportation (Tech News, 2017); (ii) the Olympic Village in Tokyo’s Odaiba district, which is planned as a space for robot taxis, driverless buses and personal robots, as well as instant translation services – the Olympic Village is subsequently intended to be a platform for robotic innovation based around R&D laboratories of AIST (the National Institute of Advanced Industrial Science and Technology) and Miraikan (the National Museum of Emerging Science and Innovation); (iii) additional robotic experiments in Tokyo, including a humanoid robot guide in subway stations (Yell Robot, 2018), a security robot patrolling Seibu-Shinjuku station (Miyatake, 2018) and a robot cafe in which robots are controlled remotely by disabled staff (Wehner, 2018).
Many of the robots that are expected to appear for Tokyo 2020 are initially tested in the special national zoned areas outside Tokyo, with the aim of bringing perfected technologies into the city in time for the Olympics. This creates a unique inter-city dynamic, with Tokyo as the locus of deployment of the robots and showcasing them to the world but with the social learning and experimentation taking place in surrounding cities. What is emerging, however, is distinctive, if fragmented, national urban robotic experiments across Japan that combine strong state support with strategic R&D and innovation strengths in robotics. These experiments tend to be limited and focused initiatives around particular enclaves and protected spaces of robotic application enabled through government support and a cohesive national robotics innovation system. However, despite the governmental visions and industrial cooperation, wider urban robotic applications have so far been constrained by the difficulty of scaling up demonstrations and the obduracy of regulatory frameworks outside the experimental zones.
Dubai: Urban robotics and environments of premium urban control
The city-state of Dubai in the challenging climatic environment of the Gulf states is reliant on state-sponsored technologically enhanced and mediated forms of urbanism to facilitate everyday life and tourism (Kanna, 2011). Initially, such sponsorship focused on the construction of massive energy infrastructure plants, the desalination of water, centralised air conditioning networks operating over large districts and massive investment in a highway system. The rapid growth of Dubai has built on this extensive infrastructure, including the construction of new land along the coast, and has produced one of the most complex and energy-intensive urban socio-technical assemblages on the planet. Central to Dubai’s development trajectory, then, is state involvement with massive technical projects – including digital technologies, and more recently an explicit commitment to develop a systemic programme of robotic applications.
Smart Dubai Government (SDG) is the technology division of Smart Dubai, ‘a city-wide initiative to transform Dubai into the world’s smartest and happiest city’ set up in 2014 (Smart Dubai, n.d.). Under this framework, there is a plan to modernise public services through digital transformation of the Dubai Government (Caravaca, 2016). This is both city-wide and systemic in its focus on all the main domains of government. In parallel with Smart Dubai is the government-sponsored Dubai Future Foundation, which aims to make Dubai the global hub for technology of the future. The Dubai Future Agenda provides a roadmap for the Foundation to shape the future of the strategic sectors in the long term in cooperation with government and private sector entities. Recognising that many of the technologies that will shape the future are being developed in experimental labs, the Foundation aims to transform Dubai into the ‘world’s largest laboratory for the governments of the future’ (Dubai Future Foundation, n.d.).
Both programmes demonstrate an attempt at large-scale restructuring of the city through ‘smart’ and ‘future’ initiatives that focus on both digital and robotics innovations. The Dubai Future Accelerators is a programme devised to bring overseas technological expertise and capacities together with Dubai government leadership to focus on the ‘identification and deployment of futuristic prototypes and products at a city-wide scale’, in order to make Dubai ‘a leading test bed for new technology’ (Dubai Future Foundation, n.d.). For that purpose, the government’s Future Dubai Foundation calls for external participants to ‘Test your solution in the real world: put your solution to the test by working directly with fast-moving partners in one of the most dynamic urban environments in the world’ (Dubai Future Foundation, n.d.). The opening and initiating ceremonies for all the experiments, applications and trials are undertaken by members of the ruling family, usually led by the ruler Sheikh Mohammed, reflecting the symbolic commitment and endorsement of urban robotic applications.
This focus on robotic urban restructuring in Dubai is primarily centred on attracting overseas participants – research institutions and private companies – to engage with the Dubai Future Accelerators in partnership with key government agencies, notably the Dubai Electricity and Water Authority (DEWA), the Dubai Health Authority, the Dubai Roads and Transport Authority (RTA), the Dubai Police Force, the Dubai Municipality and Dubai Holding Group:
DEWA has attempted to simplify connections to infrastructure services, bill payment and service delivery through major investment in smart service platforms that can be accessed in a shopping centre. In 2017, it deployed five robots as staff to provide ‘smart and innovative services’ to its customers (Government of Dubai, 2017). Equipped with robots and AI to guide users through the new platform, DEWA helps to materially demonstrate the realisation of the Smart Dubai Initiative (Government of Dubai, 2017). The functionality of these robots is limited to simply explaining to users how to access the new service platform.
In 2018, the Dubai Health Authority introduced the ‘Salem Innovative Centre’, ‘the first fully autonomous medical fitness centre in the region powered by artificial intelligence’ (Khaleej Times, 2018), to identify and perform a series of medical tests for Dubai’s working visa applicants.
The RTA has been tasked with implementing AVs and shuttle buses, as well as trialling electric autonomous flying taxis made by the German firm Volocopter. Following the trial, it started working with the Dubai Civil Aviation Authority to develop the legislative and operational guidelines (Day, 2018). The purpose of the flying taxi is to address the issues of traffic congestion and environmental pollution and to ‘lead the Arab world in innovation’ (Reuters, 2017). The objective is to automate 25% of Dubai’s transport system by 2030, with the hope of making major reductions in road deaths and injuries.
In 2016, the Dubai Police Force began a trial of a humanoid robot police officer and a miniature autonomous patrolling vehicle. The Barcelona-based PAL Robotics’ humanoid police officer and Singapore-based miniature AV OUTSAW have started patrolling shopping malls and streets in Dubai. Should the experiments prove successful, the government has announced it will robotise 25% of the police force by 2030. The government refers to this as ‘policing without police officers’, arguing that it will increase the efficiency of policing and that the growing population requires innovative technologies to turn Dubai into the safest city in the world.
Urban robotic experiments in Dubai might be described as a form of neo-smart material urbanism, in which the Government of Dubai seeks to blend smart digital technologies and the materiality of the robot. Robots have physical bodies through which new information systems at selected sites across the city are demonstrated. Neo-smart robots demonstrate the integration of material form and digital flows in a system designed to improve the efficiency of governmental systems and provide interaction between robotic staff and the users of the smart governmental systems. Dubai is robotising government functions and selected infrastructures to create new operating and business models that replace traditional services, focusing primarily on the functionality and operability of the state apparatus and infrastructure rather than augmenting individual human capacity. The Dubai case demonstrates how urban robotics is an assemblage of smart city governance and urban experimentation designed to augment the city and its users selectively to make urban systems more efficient, secure and controllable. In part, these initiatives are designed to position Dubai as a leading technological experimental context to attract international companies and research institutes to experiment in a state-protected space. However, the underlying logic of this form of experimentation is to supplement and replace humans with robots in areas such as police, municipal administration and chauffeuring. Dubai’s focus on robots becomes an extension of the state, neatly fitted into the smart city infrastructure. This is especially relevant in a city-state where 99% of the private workforce is made up of non-citizens (Cowen, 2014: 173).
Conclusion
This article has examined the challenges in creating distinctive urban infrastructural capacity for robotics by focusing on selected ‘early mover’ cities that have demonstrated an interest in experimenting with robotic applications. A critical issue addressed in the article is how robots are materialised in specific urban contexts and the extent to which they become ‘embedded’ into and shaped by other social structures, arrangements and technologies (Star, 1999). The article has mapped the initial phase of opening up space for robotic applications in the wider urban public realm. So far, the initiatives are limited in material extent and the focus has been on vision more than application. The focus has also tended to be on discrete robotic applications rather than holistic urban robotic restructuring. However, the three cases illuminated here allow us to make three main contributions to the literature and debates on urban robotic experiments and the future of urban robotics.
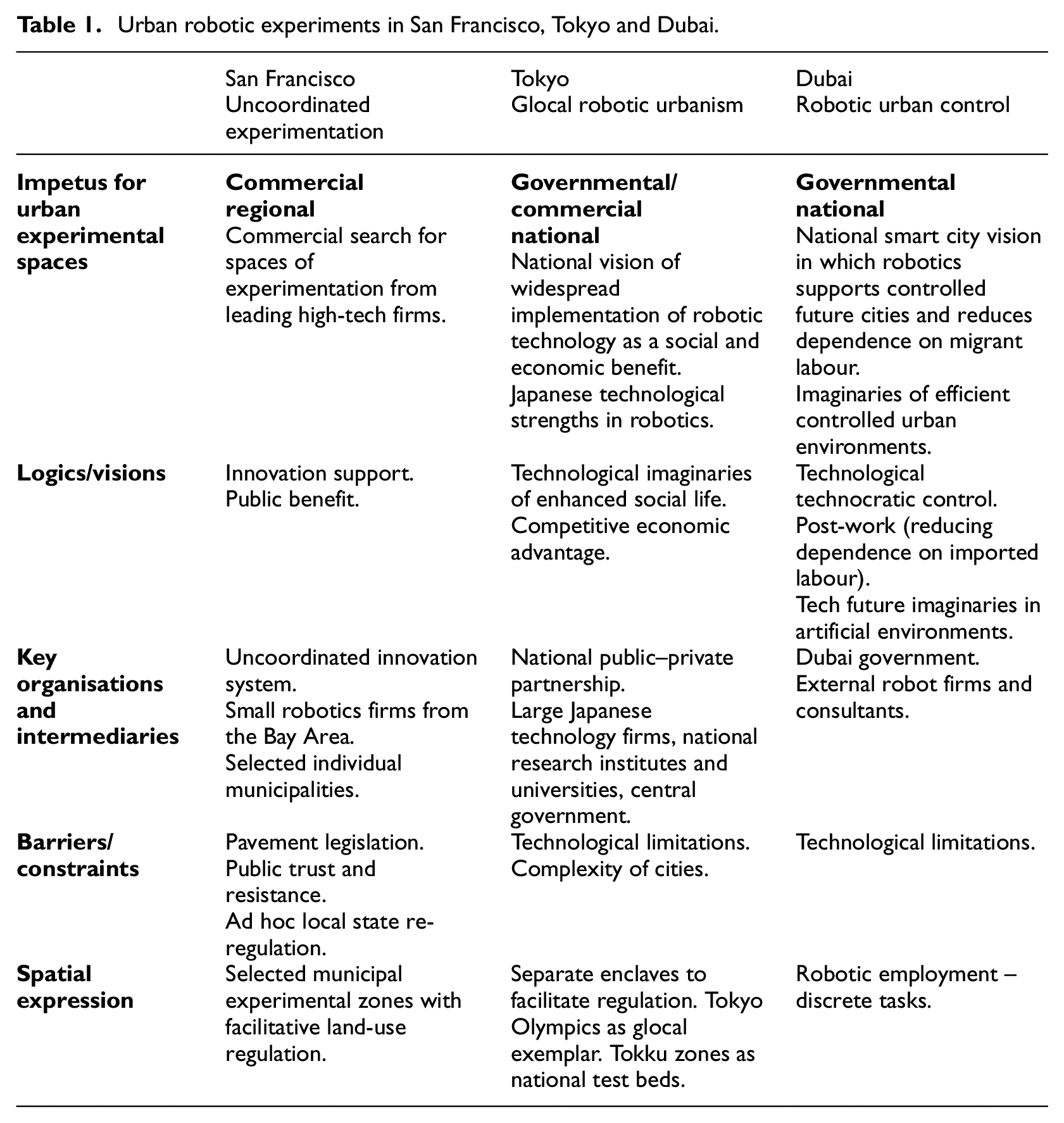
First, the article highlights the different social, technical and political contexts that create conditions for experimentation with urban robotics and the different pathways of urban robotic augmentation and restructuring they represent (see Table 1). Experimental urban robotics in California is about small-scale commercial initiatives threaded through existing infrastructure by start-up supplier-instigators in the search for new service delivery platforms. By contrast, Tokyo is one of a number of urban experiments in a wider programme of national robotic applications across Japan intended to support innovation and address pressing social challenges. Robotic urbanism in Japan is about a vision of large-scale techno-infrastructural transformation being trialled in designated experimental Tokyo zones dominated by public–private partnership between research institutes and large ‘supplier’ firms. Finally, in Dubai there is a modernising public services and infrastructures rationale for creating urban robotic test beds, where robots replace routine work and facilitate the smooth running of sanitised and segmented urban living and consumption. In all three contexts, robotics is (so far) a techno-economic project requiring substantial upfront investment underpinned by significant R&D; active programmes of testing, experimentation and demonstration; and the establishment of special spaces of robotic testing. The examples reflect the diverse models for the facilitation and promotion of urban robotics in cities, in turn reflecting the different balance of public and private interests in robotic experimentation in each context.
Urban robotic experiments in San Francisco, Tokyo and Dubai.
Second, a key challenge for governments and robotic interests is how to open up space for experimentation with potentially useful technology that raises issues of human health and safety that can only be tested fully in complex real world urban contexts. Creating that space is easier in the authoritarian context of Dubai and/or in contexts where urban space is already bounded and controlled in supportive ways, for example in the controlled zones of Olympic cities, or in smaller and less complicated urban contexts such as smaller Japanese cities or specific zoned districts and precincts in California (and zoned corridors for drone experiments within the US more generally). In democratic contexts, the roll-out of urban robotics is subject to various forms of public resistance, and many urban governments will be wary of potential risk to citizens. In this respect, the experiments we have outlined are not just about placing robots within cities, but rather they reflect the necessary co-evolution of spatial planning, urban regulation, urban design and human–robotic interaction in the future ‘infrastructuralisation’ of robotically augmented cities (Marsden et al., 2019). Our case studies have been about the placing of robotics within existing urban contexts prior to the process of co-evolution. The contexts will be different for new-build projects and enclaves that are based around robotics and automation from the outset.
Third, within urban studies there is a need for work on urban technologies, smart cities and urban automation to accommodate the distinctive physicality of robotics and the interrelations with urban services, urban infrastructure, the home and everyday life. It is also important to consider the distinctiveness of robotics as a specific socio-technical domain with its own historical lineages and antecedents. Urban studies will need to carefully consider the logics, rationalities and techniques developed in sectors – aviation, logistics and manufacturing – that sit outside the urban context in order to more effectively understand how these systems might transmute and mesh with urban life. There is a need specifically to engage with the logic of robotics as a distinctive functional capacity and potentially new logic of urban control. Across all our cases, there is diversity in the rationales for robotic application that reflect different economic, social and political contexts. In San Francisco, there has been public resistance to the extended security and surveillance functions of urban robots. However, the rationale for urban experimentation in our case studies has been about robotics as a public good and there has been limited debate about who or what is empowered, disempowered or diminished by robotic restructuring. Experience in cities such as Tokyo, Dubai and even San Francisco suggests that the technology will precede wider discussion about its potential social impacts.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.