
Abstract
Intelligent monitoring of environmental information in ships is an important prerequisite for reducing and avoiding accidents and is of great importance for safety at sea. The use of a ship environmental monitoring system based on wireless sensor networks has the unique advantages of low cost, stability, and reliability, allowing real-time monitoring of many environmental factors in ships. This article proposes an optimal topology control to maximize collected data satisfaction and reduce energy consumption and transmission latency. First, the cluster head selection method is obtained by initializing the wireless sensor network with a fuzzy clustering algorithm, then the amount of collection data is obtained by a sub-gradient descent algorithm, and a sensor association scheme based on ant colony optimization is proposed to solve the knapsack problem. Finally, simulation results show that the proposed algorithm in this article can effectively reduce the energy consumption and transmission delay of the wireless sensor network while ensuring the monitoring of the grounding protection in the electrical system of the offshore ship.
Introduction
Ships play a vital role in both commercial and military systems, and as the shipping industry continues to grow, ships are becoming larger and more complex. This trend has led to an increase in ship safety concerns, making it increasingly important to monitor the ship's environment to reduce and avoid accidents. Intelligent monitoring of the ship's electrical system is particularly crucial in this regard.1,2 The maritime environment is complex and accidents can occur unexpectedly. Therefore, it is important to monitor the ship's environmental information to ensure safety at sea. By monitoring the ship's electrical system, potential problems can be detected early and addressed before they escalate into more serious issues. Intelligent monitoring of the ship's electrical system is a crucial component of a comprehensive ship monitoring system that can help reduce accidents and ensure the safety of those on board.
Ship automation technology has advanced rapidly in recent years, leading to the widespread implementation of various sensors in ship systems. Ground fault (GF) protection, which is based on residual current detection, is the basic protection method used in these systems and has been extensively studied.3,4 Regarding the characteristics of grounding protection. Firstly, the grounding protection system can promptly disconnect the power supply when electrical equipment malfunctions, preventing current from passing through the human body or other non-resistors. As a result, personal safety and equipment are protected. Secondly, the grounding protection system utilizes grounding cables to introduce electromagnetic interference signals into the ground, thereby preventing interference with electrical equipment. Moreover, grounding allows for the dissipation of static electricity in equipment, thus preventing safety accidents resulting from static electricity accumulation. Lastly, the grounding protection system stabilizes the voltage and guards against the detrimental effects of voltage fluctuations on electrical equipment.
Currently, most ship monitoring technology uses wired transmission methods, which limits the number of sensors that can be used and makes it difficult to add additional sensors. As ship monitoring technology continues to evolve, the traditional wired monitoring method may no longer be sufficient. Fortunately, wireless sensor networks (WSNs) offer a convenient alternative to wired sensors. These self-organized nodes can be densely arranged on the ship, improving the fault tolerance and reliability of the monitoring system. With the ability to set up wireless sensors, real-time monitoring data can be easily transmitted without the need for wired connections. This provides a more efficient and reliable way of monitoring the ship's electrical system and other critical systems on board. By providing more comprehensive and real-time monitoring data, WSNs can help identify and address potential issues before they become more serious. Because of the unique characteristics of WSNs, this article applies them to the ground protection detection system of the power system. Firstly, WSNs enable the installation of wireless sensors on grounding protection equipment, including current transformers, circuit breakers, and grounding cables, to monitor their real-time working status. Secondly, these wireless sensors can collect data from the grounding protection devices and transmit it wirelessly to a central processing system. Subsequently, the collected data can be analyzed in real-time by the central processing system to detect any anomalies. Finally, the system can also record and track historical data of grounding protection equipment, facilitating trend analysis and predictive maintenance.
However, the unique characteristics of WSN nodes pose significant challenges for implementing in-ship monitoring. One of the most critical challenges is energy consumption, as the battery must power the sensor node for long periods of time, and battery replacement can be difficult due to the complex structure of the ship's internal environment. As such, energy efficiency is of utmost importance for WSNs used in ship monitoring systems. Another challenge is data redundancy, where multiple nodes may sense the same data, resulting in duplicate data transmissions to the base node or data receiver. This not only depletes node energy but also increases transmission delays, which can lead to degraded system performance. Therefore, efficient data collection strategies are essential to minimize both delay and energy consumption. While WSNs offer many benefits for monitoring ship systems, such as flexibility and wide deployment scale, addressing these energy and data redundancy challenges is essential to improve their efficiency and effectiveness in ship monitoring.
In this paper, we focus on strategies for optimizing topology control and data collection in ground protection WSNs used in ship condition monitoring systems. When it comes to data collection, more data leads to higher accuracy in predictions based on data processing. To measure the relationship between the amount of data collected and the prediction accuracy, we propose a fitness function. On the other hand, optimizing sensor network topology control can increase the sensor transmission rate, which in turn reduces energy consumption and transmission delays. By finding the optimal topology control and data collection strategies, we can improve the efficiency and accuracy of ship monitoring systems. Our proposed fitness function helps us to balance the amount of data collected with the accuracy of predictions of potential safety hazards. Meanwhile, optimizing topology control can help WSNs reduce energy consumption and transmission delays, making the system more reliable, accurate, and efficient, ultimately contributing to enhanced safety of ships.
The main contributions of this article are as follows:
(1) This article presents an analysis of the factors that influence the energy consumption and latency of WSN systems, including the quantity of data collected and sensor association. To enhance the lifetime of WSNs, we propose a joint optimization problem for data collection and topology control in a ship monitoring system equipped with grounded protection sensors. (2) This article applies the block coordinate descent (BCD) algorithm to find an optimal solution for data collection, and the network topology control is formulated as a knapsack problem and an ant colony optimization (ACO)-based topology control scheme is proposed to solve the problem. (3) The upper bound of the proposed objective function and optimal cluster head (CH) selection are also obtained, and results from practical simulations indicate that the discrepancy between the solutions derived by our algorithm and the optimal solution is relatively minor. This confirms the efficacy of our approach in achieving near-optimal results for WSNs.
The rest of this article is organized as follows. The related works are summarized in the “Related work” section. The system model is given in the “System model” section. In the “Problem formulation and problem solution” section, a multi-constrained mixed-integer optimization problem is formulated and an efficient multi-iterative algorithm is proposed to solve this problem. Simulation results are presented in the “Simulation results and analysis” section to demonstrate the performance of the proposed algorithms. Finally, the conclusion is given in the “Conclusion” section.
Related work
There are many studies related to maritime communications, using sea surface spectroscopy to generate sea surface scenarios at high sea states, and then using ray tracing algorithms to analyze maritime unmanned aerial vehicle communications in the ultra-high frequency band. 5 On the basis of studying the development trend of optical communication, a communication mode based on optical communication is proposed to solve this problem. 6 Assume free-space optical links between ships or between ships and coasts, and model the pointing error that occurs based on the three typical movements of the vessel. 7
GF is common in practice, and GF is the most common type of fault in medium-voltage power grids. In, 8 the aim is to help protect engineers, engineering consultants, and power system operators to correctly apply GF protection systems while complying with local electrical codes. Real data obtained from the Scandinavian resonant grounding network was simulated in RSCAD/RTDS and different effects on distance protection were simulated. Four types of cross-country faults (CCFs) that display different patterns are defined and explained. 9 The effectiveness of power system overcurrent protection associated with single-wire ground (SLE) faults is closely related to the neutral grounding principle employed. 3
A new capacitive sensor front-end supply voltage drive (SVDR) scheme is proposed to eliminate parasitic capacitance effects. 4 With different protection schemes for different faults, a new method for single-phase GF protection of distribution systems based on relay agents is proposed. In order to obtain the most informative fault characteristics to identify the fault of the system, the traditional protection scheme based on different fault characteristics is analyzed. 5 Due to the double grounding of the secondary cable, the current transformer signal is disturbed by the potential difference of the ground grid. In order to study the mechanism of the interference signal, a simulation model based on an electromagnetic transient program is established, and the coupling path of the potential difference of the ground grid is analyzed. 10 A new protection method based on traveling waves is proposed to solve this problem. This method compares the polarity of the current and voltage traveling waves measured immediately after the fault begins to determine the fault direction. Operation is prohibited by using the power frequency voltage detected on the busbar, and interference tripping is avoided. 11 Developed and analyzed a low-power WSN using neutral point-to-ground voltage as a power source. It consists of a wireless sensor node powered by battery-free energy harvesting, a gateway (if needed), and a local or remote server (if used). 12
System model
Regarding the proposed model, a detailed explanation will be given. Firstly, a WSN is composed of numerous miniature sensors that can be deployed throughout the ship, including areas such as engine rooms, hulls, and decks. These sensors collect various types of data, such as temperature, humidity, pressure, vibration, and sound. The collected data is then subject to real-time analysis, allowing for monitoring of the ship's operational status. This enables timely detection of abnormal situations, such as machinery failures, leaks, or fires, and facilitates issuing early warning signals. Finally, WSNs can be integrated with other ship communication systems, such as wireless local area networks (WLANs), satellite communication, and shortwave communication, to fulfill diverse communication requirements within the ship and between the ship and the external environment. Additionally, a universal sensor configuration will be set.
Consider a shipboard monitoring system with a grounded protection sensor network, the main function is to monitor the status of the ship during transportation, loading, and unloading. The WSN consists of N sensor nodes deployed in the monitored area, the set of sensors is denoted as N and satisfies

A ship monitoring system based on wireless sensor network (WSN).
Denote

The equation shows that each sensor can only be selected to be associated with one CH. In addition, a constraint on the number of CMs accessed with each CH is required

Data satisfaction model
The sensors usually produce errors during the data collection clock, which affect the quality of the overall system monitoring sensors. However, if the system collects more data, then the probability of data distortion is smaller and the level of satisfaction obtainable is higher. The utility function is a function that expresses comfort or satisfaction as a function of power consumption, usually non-decreasing or concave, and the most commonly considered function is the quadratic utility function.
13
To measure satisfaction with the data collection, a quadratic utility function is defined as

Delay model
The sensors first send the collected information to the CHs, and the CHs then fuse the data and send it to the BS. Therefore, the system latency can be divided into two parts the data forwarding latency from the CMs to the CH and the data transmission latency from the CH to the BS. In intra-cluster information forwarding, CMs forward their sensed data directly to CHs in frequency division multiple access (FDMA). In CHs-to-BS data transmission, CHs fuse the sensed data with the data received from CMs and finally send the packets to the BS. FDMA can be used for data transmission between sensors and BSs, which orthogonalizes the transmission from different nodes and completely mitigates intra-cell interference. From Shannon's formula, the rate of transmitting data from to satellite can be expressed as
14
:

Therefore, the delay in transmitting data from


Energy consumption model
The system energy consumption mainly comes from two parts: data collection energy consumption and data transmission energy consumption. For data collection, since the collection energy consumption is positively correlated with the data volume, the following collection energy consumption model is defined:

The data transmission energy consumption is further divided into CMs forwarding energy consumption and CHs transfer energy consumption. For

The transmission energy consumption from

Problem formulation and problem solution
Cluster heads selection
The fuzzy C-mean clustering (FCM) algorithm is a common clustering algorithm that divides the data set by using the affiliation function. The main process of the FCM algorithm is to optimize the objective function through continuous iteration to finally achieve the clustering result. In the clustering process, K categories are formed. By iteratively optimizing the objective function, the FCM algorithm obtains the degree to which each sample belongs to each of the K categories, that is, the fuzzy affiliation degree, and finally decides the category of each sample based on comparing the magnitude of the fuzzy affiliation degree.
The distance between the object

Problem formulation
We propose an acquisition data volume and sensor correlation problem that aims to maximize the satisfaction of sensor data acquisition as well as to reduce energy consumption and data latency. The system delay is relatively small compared to the system energy consumption, so it is necessary to introduce the associated weighting factor

Problem solution
Through the modeling of the above problem, the variables of sensor association and node collection data volume need to be optimized for the ground protection sensor network, which is a non-convex mixed-integer optimization problem with coupling between variables. In order to be able to decouple these variables, this article decouples the joint optimization problem into two subproblems and applies the BCD method of convex optimization with alternating iterations to solve the optimization to obtain suboptimal solutions. First, the amount of collected data is optimized by fixing the sensor association; then, the sensor association is optimized for a given collected data design. After sufficient iterations, the proposed algorithm gradually converges and the suboptimal solution is obtained.
1) When a sensor association is given, the optimization problem for data collection can be redefined as
This problem is a convex optimization problem and its optimal solution can be obtained by the Lagrangian dual method. The Lagrangian function and the dual problem for this optimization problem are, respectively.


When n is a 2) Association optimization: When the amount of data collected by the node is fixed, the solution for the sensor association yields the expression for 3) The ACO algorithm was chosen for several reasons. First, ACO is a meta-heuristic algorithm that is widely used in solving combinatorial optimization problems, making it suitable for various engineering fields, including network routing problems. Unlike popular lightweight heuristics in the WSN community, ACO algorithms exhibit superior capabilities and performance in handling large-scale, complex optimization problems. Additionally, the ACO algorithm effectively balances the diversity and quality of solutions, a crucial characteristic for solving problems in WSN. Given the abundance of sensor nodes in WSNs, a method is needed to handle a large number of solutions while still finding high-quality solutions. Lastly, the ACO algorithm demonstrates good robustness and adaptability, enabling it to handle dynamic changes in the WSN environment. When compared to other heuristic methods, the ACO algorithm is more adept at adapting to issues like node failure and energy exhaustion in WSN.
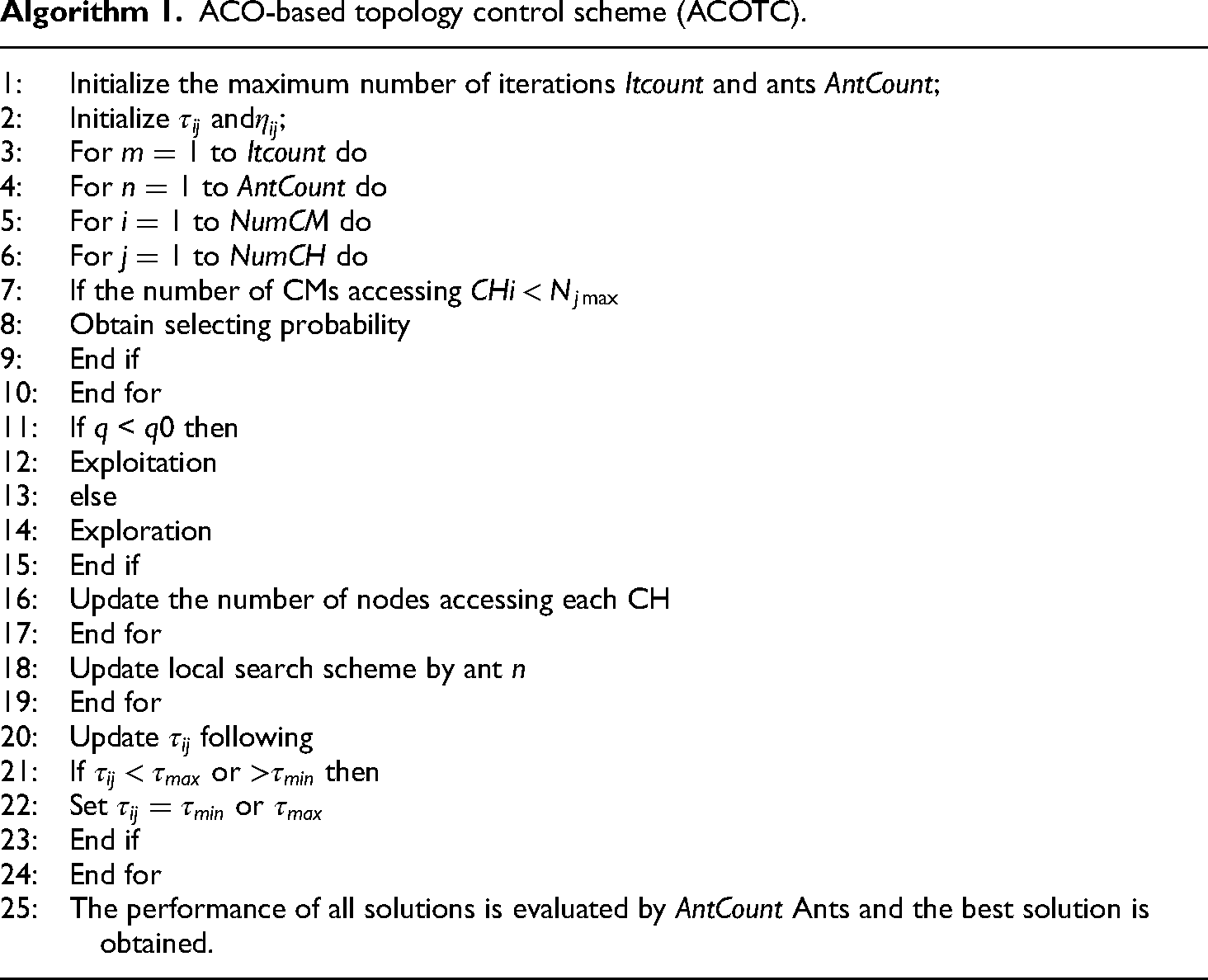
This subproblem is a 0-1 multi-knapsack problem. Dynamic programming is widely used to solve the knapsack problem, however, the solution time complexity of dynamic programming increases dramatically when the dimensionality of the optimization variables of the problem increases. In this article, an ACO-based algorithm is proposed to solve this sensor association subproblem.
The ACO algorithm is an algorithm proposed by Marco Dorigo inspired by the behavior of ants searching for food and discovering paths, and it is a probabilistic algorithm for finding optimal paths. The main idea of the algorithm is that ants within a colony have the ability to perceive pheromones, and they will search along paths with a high concentration of pheromones. Pheromone is released by ants themselves and is the substance that enables indirect communication within the colony. Since the round trip time of ants on shorter paths is shorter, pheromones accumulate faster than on longer paths. Therefore, the ants behind will have a higher probability of choosing the path with better pheromone concentration, that is, they tend to choose a shorter path forward. This positive feedback mechanism causes more and more ants to travel on the shortest path between the nest and food. As pheromones on other paths gradually evaporate away, eventually all ants choose the best path.






First, a colony containing Q ants is constructed and the set of pheromones is initialized. Initially, all ants choose a path according to probability, that is, the probability of


Meanwhile, exploitation and exploration are balanced by setting upper and lower bounds of pheromones, which are set as
For the CMs, all CH sets with less number of


ACO-based topology control scheme (ACOTC).

Overall algorithm design
Algorithm 2 outlines the CH selection, data collection, and sensor association algorithms. At the beginning of the DCSA algorithm, the initial CH selection and sensor association are obtained by the FCM algorithm (Figure 2). After that, the data volume M is collected by steps 5 to 9 until the subgradient algorithm converges to a predefined accuracy. Based on the optimized data acquisition, the suboptimal sensor associations are obtained as described in Algorithm 1 (ACOTC). After repeated iterations, until the CH sum does not change anymore and the target value converges to the predetermined accuracy, we think that a suboptimal solution has been found for this problem. Then, CH is reselected based on the sum of the Euclidean distances between each sensor and the other sensors based on the results of the sensor associations. We consider the whole algorithm converged when the sensor associations and CH no longer vary.

Flowchart of the proposed algorithm.
Simulation results and analysis
We consider a monitoring area of
Simulation parameters.

CMs: cluster members; CH: cluster head.
Data collection and sensor association based on ACO (DCSA).

The following schemes are simulated to verify the performance of the proposed algorithm:
Random: All nodes are randomly associated with sensors. Its sensor nodes are randomly related to each other. Greedy: obtains the solution to the problem by a series of locally optimal choices. Its sensor is associated with the nearest CH. CVX: Solve the convex optimization problem by relaxing the sensor association decision variable
Simulation results
Figure 3 shows the convergence of the algorithm proposed in this paper compared with other algorithms. In the beginning, the convergence curves of all algorithms keep rising with the number of iterations. After iteration for a period of time, the correlation between CHs and sensors will not change, and then all algorithms will gradually converge. In addition, when the algorithm converges, the objective function value of CVX is the largest, and the convergence value of ACO is between greedy and CVX and is closer to the value of CVX, which indicates that ACO can also obtain a high-quality approximate optimal solution. The feasible solution obtained by the greedy algorithm has a certain gap from the optimal solution.

Objective function values versus number of iteration rounds.
Figure 4 shows the number of CMs accessing each CH after sensor association by different algorithms. It can be seen from the figure that the algorithms proposed in this article are comparable to CVX in terms of the balance of the number of visits.

Number of CMs associated with each CH.
Since the deployment density of sensor nodes in the area near CH3 is larger compared to several other CHs, the number of CMs associated with CH3 is the highest obtained by all three algorithms. For the greedy algorithm, the number of nodes accessing each CH varies more or less, and CH3 directly reaches the upper limit of the number, which can cause excessive energy consumption in the CHs and shorten the survival time of the sensors. CVX can achieve the optimal solution for multiple associations, so the number of CMs per cluster is most evenly distributed. ACO has some differences with the optimization results CVX, resulting in a slightly lower balanced CM allocation than CVX, but the difference is small, which indicates that the proposed algorithm is beneficial for the balanced allocation of node accesses and prolonging the survival time of WSNs
Figure 5 shows the system energy consumption after sensor correlation by different algorithms. For sensor nodes, they always try to minimize the system energy consumption by associating with the appropriate CH. In the random algorithm, sensor nodes are randomly associated with CHs, which causes nodes that should be associated with relatively close CHs to transmit data with the farthest CHs, requiring more energy, and this unreasonable allocation prevents other CMs from getting the proper association, so the random algorithm has the worst performance. For the greedy algorithm, although the result of greedy is not the most reasonable, it also has a relatively large performance improvement compared to random. The relatively reasonable sensor association control based on ACO is beneficial to reduce the system energy consumption. The CVX algorithm relaxes the association factor so that a CM can associate multiple CHs at the same time to obtain the optimal multiple association case, and it can be seen that the system energy consumption of the sensor network controlled by ACO is not much different from that of CVX. Therefore, the algorithm proposed in this article has good performance in reducing sensor energy consumption and extending the sensor life cycle.

Energy consumption performance comparison of different algorithms.
Figure 6 shows the data transmission delay after sensor association by different algorithms. The performance of the algorithm proposed in this article is second only to CVX. The system latency consists of two components: the CM to CH forwarding latency and the CH to satellite transmission latency. In the random algorithm, the sensor nodes randomly select CHs for data forwarding, which may cause the situation of associating with the farthest CH or sending data to the CH farthest from the satellite, and also cause other CMs not to select the appropriate CH due to the limitation of the number of CM associations, so Random has the most severe data latency. For the greedy algorithm, the transmission delay of the system is affected by the uneven number of associations of CHs. The sensor associations obtained by ACO based on path construction and pheromone update can effectively reduce the delay and improve the system’s performance. CVX relaxes the association decision variables to [0, 1] to obtain the upper bound of the algorithm, and it can be seen that CVX is not much different from this upper bound. Therefore, the algorithm proposed in this paper can effectively reduce the data transmission delay.

Delay performance comparison of different algorithms.
In Figure 7, the ACO algorithm demonstrates the best life cycle performance, followed by the CVX algorithm, while the greedy algorithm performs relatively poorly. The reason for this disparity lies in the fact that the greedy algorithm only considers immediate optimal solutions without any backtracking process. Consequently, if a particular strategy is adopted and subsequently found to be suboptimal, it cannot be reevaluated. This limitation proves inefficient when dealing with large amounts of data. On the other hand, the ACO algorithm effectively utilizes computing resources, exhibits strong adaptability, and facilitates global optimization search. Its adaptability and robustness to dynamically changing environments contribute to its superior life cycle performance compared to the greedy algorithm.

Wireless sensor network (WSN) lifetime performance comparison of the algorithms.
Conclusion
To achieve greater automation on ships, sensors are increasingly being used in onboard electrical systems, with grounded protection being a crucial application scenario. This article proposes a joint optimization problem that considers data collection and sensor association in a shipboard monitoring system with a grounded protection sensor network combined with a LEO satellite. To solve the problem, an algorithm based on BCD and ACO-based topology control is proposed. The algorithm determines optimal sensor association, CH selection, and topology control strategy for WSN. Simulation results demonstrate that the proposed algorithm effectively enhances data satisfaction of the grounded protection sensor network, reduces data transmission delay, and thus greatly improves ground protection efficiency and ensures onboard power consumption safety.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Author biographies
Benxiang Wu holds a PhD in Electrical Engineering. His area of research is protection and control technology of the power system.
Geng Li holds a PhD in Electrical Engineering. His area of research is protection and control technology of the power system.
Jianhua Wu is a Master of Optical Engineering. His area of research is polarization measurements and optical fiber sensing.
Youyuan Li is a Master of Science in Information and Communication Engineering. Her area of research is mobile edge computing focusing on task offloading and resource allocation.