
Abstract
Model abstraction for finite state automata is helpful for decreasing computational complexity and improving comprehensibility for the verification and control synthesis of discrete-event systems (DES). Supremal quasi-congruence equivalence is an effective method for reducing the state space of DES and its effective algorithms based on graph theory have been developed. In this paper, a new method is proposed to convert the supremal quasi-congruence computation into a binary linear programming problem which can be solved by many powerful integer linear programming and satisfiability (SAT) solvers. Partitioning states to cosets is considered as allocating states to an unknown number of cosets and the requirement of finding the coarsest quasi-congruence is equivalent to using the least number of cosets. The novelty of this paper is to solve the optimal partitioning problem as an optimal state-to-coset allocation problem. The task of finding the coarsest quasi-congruence is equivalent to the objective of finding the least number of cosets. Then the problem can be solved by optimization methods, which are respectively implemented by mixed integer linear programming (MILP) in MATLAB and binary linear programming (BLP) in CPLEX. To reduce the computation time, the translation process is first optimized by introducing fewer decision variables and simplifying constraints in the programming problem. Second, the translation process formulates a few techniques of converting logic constraints on finite automata into binary linear constraints. These techniques will be helpful for other researchers exploiting integer linear programming and SAT solvers for solving partitioning or grouping problems. Third, the computational efficiency and correctness of the proposed method are verified by two different solvers. The proposed model abstraction approach is applied to simplify the large-scale supervisor model of a manufacturing system with five automated guided vehicles. The proposed method is not only a new solution for the coarsest quasi-congruence computation, but also provides us a more intuitive understanding of the quasi-congruence relation in the supervisory control theory. A future research direction is to apply more computationally efficient solvers to compute the optimal state-to-coset allocation problem.
Keywords
Introduction
Discrete-event (dynamic) systems are a typical class of computer-integrated man-made system with discrete state spaces and event-driven characteristics. They can be modeled by a state-transition structure such as deterministic or non-deterministic finite automata (DFAs or NFAs) and Petri nets. Both formalisms are used for designing supervisory controllers of a DES.1–5 On the one hand, the supervisory control theory developed in Wonham and Cai, 1 Ramadge and Wonham 3 is regarded as a seminal work for the treatment of supervisor synthesis for a DES such that the closed-loop behavior is observable,6,7 controllable, nonblocking, 8 and maximally permissive. On the other hand, a Petri net (PN) is also a common mathematical tool for modeling and analyzing a DES, which often avoids explicit state exploration but derives certain network properties through the net structure.9–14 Both methods are popular for synthesizing satisfactory supervisors.
Due to the theoretical maturity, DES have received much attention from academy and industry communities.15–22 However, DES control methods have not yet been extensively applied to industrial scale problems, owing to the state explosion problem: the number of reachable states increases exponentially with that of concurrent components and variables. 23 The intractable number of states may quickly deplete the computer memory and terminate the computation if the given system is structurally complex. Therefore, effectively exploring the huge state space with limited memory and time is a significant and persistent research subject.
To tackle the state explosion problem, many reduction methods have been developed, including equivalence reduction24,25 and process equivalence, 26 model abstraction, 27 symbolic computation and state tree structures,28,29 and partial order reduction, 30 which all benefit from the proper design and analysis of the system architecture.
Model abstraction based on equivalence relations is an efficient way to reduce the state size of finite state automata. An equivalence relation on the state set of a finite state automaton partitions the state set as a collection of equivalence classes (or cosets). The set of cosets defines a simpler finite state automaton with fewer states, which is called the quotient automaton31,32 of the original one with respect to the equivalence relation. In many applications, the observable language of the quotient automaton must be equivalent to the original automaton. The identity implies that if two states of the original automaton are equivalent, the same observable event sequences must be defined at both states. This property is guaranteed by the quasi-congruence equivalence, 1 which is similar to the concept of bi-simulation. 33
It is necessary to thoroughly investigate the results on the quasi-congruence relation of DES in references,1,2,34,35 and use them to effectively reduce the computational complexity of the formal verification and control synthesis of DES. Most contemporary approaches31,32,36–39 are based on graph theory. However, we adopt a new approach to the quasi-congruence relations by binary linear programming in the paper, and apply it to reduce the state space.
Wong and Wonham 31 solve the problem on how to design an observer by modifying the given causal reporter map that is not an observer. The method is to compute the coarsest equivalence relation, which is finer than that of the given map. A polynomial-time algorithm is developed to compute an observer of an automaton, and it can also be used to verify the observer property of natural projection. However, this algorithm cannot be applied to natural projection directly.
Feng and Wonham 32 adopt the algorithm in Wong and Wonham 31 to the natural projection, where the minimum event extension is particularly interesting, whose computation, however, is shown to be NP-hard. In this case, an acceptable event extension can be found by developing a polynomial-time algorithm.
These methods are based on graph theory and state-transition data structure. The novelty of this paper is to solve the optimal partitioning problem as an optimal state-to-coset allocation problem. Partitioning states to cosets is considered as allocating states to an unknown number of cosets and the requirement of finding the coarsest quasi-congruence is equivalent to using the least number of cosets. Then the problem can be solved by optimization methods, which leverage many powerful and easy-to-use software tools, such as CPLEX (the CPLEX optimizer can be available on the website https://www.ibm.com/analytics/cplex-optimizer) 40 and SAT solvers (the SAT solvers can be available on the website https://www.satlive.org/solvers). 41 These computation tools exploit modern computing technologies, such as graphics processing unit (GPU) computing, 42 parallel computing, 43 and cloud computing. 44 Large scale problems of finding the coarsest quasi-congruence may be solved by modern optimization technologies.
To this end, this paper formalizes the problem of finding the coarsest quasi-congruence as a binary linear programming problem. The design variables form a binary allocation matrix between the states and cosets. The constraints are relationships between states and cosets, and the objective function is to minimize the number of cosets. The main contributions of this paper are summarized below.
The number of design variables determines the computational complexity. In Section 4, a property of the allocation problem is discovered and proved to remove around half of the binary design variables.
A novel approach on how to compute the supremal quasi-congruence is proposed, which is based on a combination of propositional logic and binary representation in Section 5.
The method proposed in Section 5 is converted to a binary linear programming problem, so as to save computing time. In this transformation, we formulate a few techniques of converting logic constraints on finite automata into binary linear constraints which are formalized and proved to be correct in Section 6.
The correctness and efficiency of our method are verified by different solvers and examples in Section 8.
Compared with existing studies, the motivation of this work is to propose an optimization method for quasi-congruence computation of DFAs, and to increase the generality of optimal quasi-congruence computation algorithms. The computational results of this method are the same as that of using the computation software TCT (the software TCT can be available on the website https://www.control.utoronto.ca/DES/Research). 45 for supervisory control design.
The work is structured as follows. The preliminaries pertaining to automata and natural projection are recalled in the following section. Some functions and concepts that are necessary for the quasi-congruence calculation, and the coarsest quasi-congruence are reported in Section 3. Section 7 touches on the main algorithm implementation of the proposed approach. Finally, Section 9 concludes this research.
Preliminaries
This section recalls some basic concepts of deterministic finite automata used in the paper. Then we review the definition of quasi-congruence relation and some operations on it. More details on automata can be found in references.1,2,31,32,46–48
Fundamental of automata
A deterministic finite automaton (DFA) 1 is represented as a five-tuple,

Note that the set of all finite strings over
Natural projection
Given two event sets:


Next, the natural projection

Note that

Equivalence relation and quasi-congruence relation
This section defines three important functions and some concepts associated with the quasi-congruence computation.
Equivalence relation
Suppose that
In this paper,

By reflexivity
Functions
In a DFA

and

Note that if
For concise presentation, we define a new event


At a state
The composite


Quasi-congruence relation
Assume that
(1)
(2)
(3)
The coarsest quasi-congruence

Quotient automaton
For a state set

where

The quotient automaton may be nondeterministic.
Matrix representations
Define the reachable matrix of each event

Let
The quasi-congruence relation

If
Now that the
For all
Set
Finally, we can construct the lower triangle allocation matrix
Lower triangular allocation matrix

Quasi-congruence calculation
In this part, we propose a new approach of calculating the supremal quasi-congruence using the Boolean allocation matrix and logical propositions.
Let

Then the decision variables are

In total, there are
The objective is to find the coarsest quasi-congruence, which has the least number of cosets among all quasi-congruences of the given DFA

To represent quasi-congruences, these decision variables must satisfy the following constraints from C1 to C3.



If two states
Step 1: The reachable state sets of states


Based on the definition of reachable matrix in (13), the two state subsets are equivalent to two row vectors of length
Step 2: we need to compute

Similarly,

Thus, it follows that the equality

Therefore, we can further get the logical formulas of this constraint C3:
If
If
• One case is that one of the two row vectors

• When neither of the two reachable state sets is empty, that is, both

Transforming logical propositions to linear constraints
Many constraints in Section 5 are logical constraints. Solving this problem is a Constraint Satisfaction Problem (CSP) or SAT problem.52,53 A well-known solution to the CSP is to convert the logical constraints into binary linear constraints and to solve the problem by binary linear programming. 54 There are three main logical propositions that need to be converted equivalently. In this section, we will show how to convert them into equivalent linear inequalities.

If
(⇐) If the linear inequalities on the right-hand side hold, then we need to prove that the left logical proposition is also true.
If
On the other hand, if
Clearly, it can be seen from the above derivation that the logic proposition is also satisfied in the two cases.
Accordingly, we can conclude that this equivalent transformation is always true. □

If the logical expressions are 1, at least one
If the logical expressions are 0, then all
(⇐) If the right-hand side of Proposition 3 holds, then we need to prove that the left logical formula is also true. There are two cases as below.
1. If all

Since
(2) If there exists at least one

Since
Therefore, it can be seen from the above derivation that the Proposition 3 is always true. □
Next, we introduce the following lemma for establishing Proposition 4.
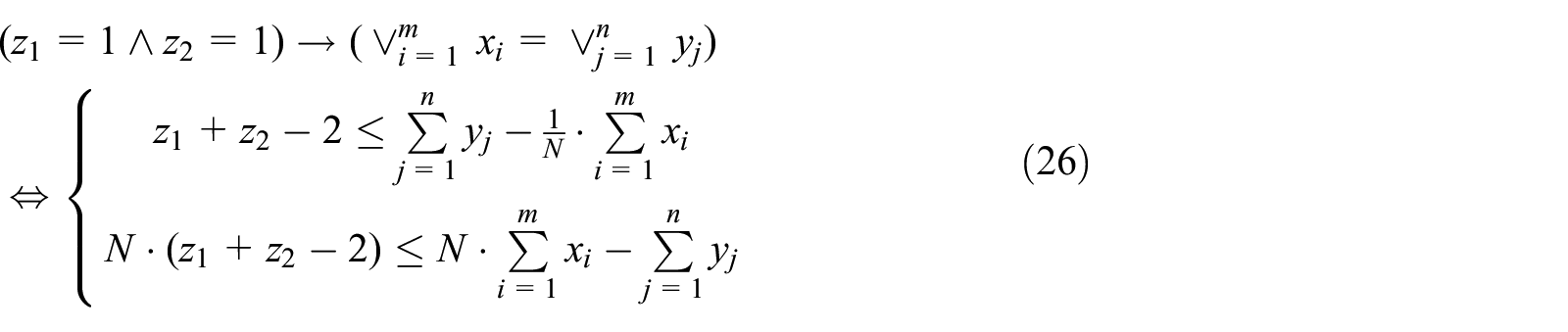

Second, based on Lemma 1, we can translate the logical implication (27) into the following form.

The next step is to show that if the two propositions in (28) hold, then the two inequalities of (26) also hold. The proof has two cases.
If both
Otherwise, then

Because


Summing the inequality pairs in (30) and (31), we have the following two inequalities.

Since

Recalling
(⇐) We prove this direction in two cases.
If
If


The inequalities (35) are equivalent to the right-hand side inequalities by Proposition 3.
Therefore, we can know that the equivalent conversion of Proposition 4 is always true. □
The main algorithm and procedure of model abstraction
Main algorithm
According to Proposition 2, it is easy to convert the constraints of C1 into the following pairs of linear inequalities. For any

Moreover, the constraints of C2 are already linear equality constraints. Finally, all linear inequality constraints of C3 are obtained by Algorithm 1.

In the following Algorithm 1,
This algorithm computes the linear inequalities for all pairs of states
In the algorithm, line 6 corresponds to formula (22) in Section 5. Line 12 represents case (a) of the constraints C3. Lines 14–23 implement the second case in case (b) of C3. Finally, lines 17–22 correspond to the linear inequalities from the transformation of the logical formula (23) according to Proposition 4.
Model abstraction
This section presents the complete procedure of computing the model abstraction.
Input: A finite automaton
Step 1: Compute the reachable state set function
Step 2: Compute the coarsest quasi-congruence by solving the optimization problem (17)–(20) using the proposed method in the paper, based on all the reachable matrices
Step 3: Compute the quotient automaton for
Output: The quotient automaton is the abstraction of
Computational examples
An illustrative example
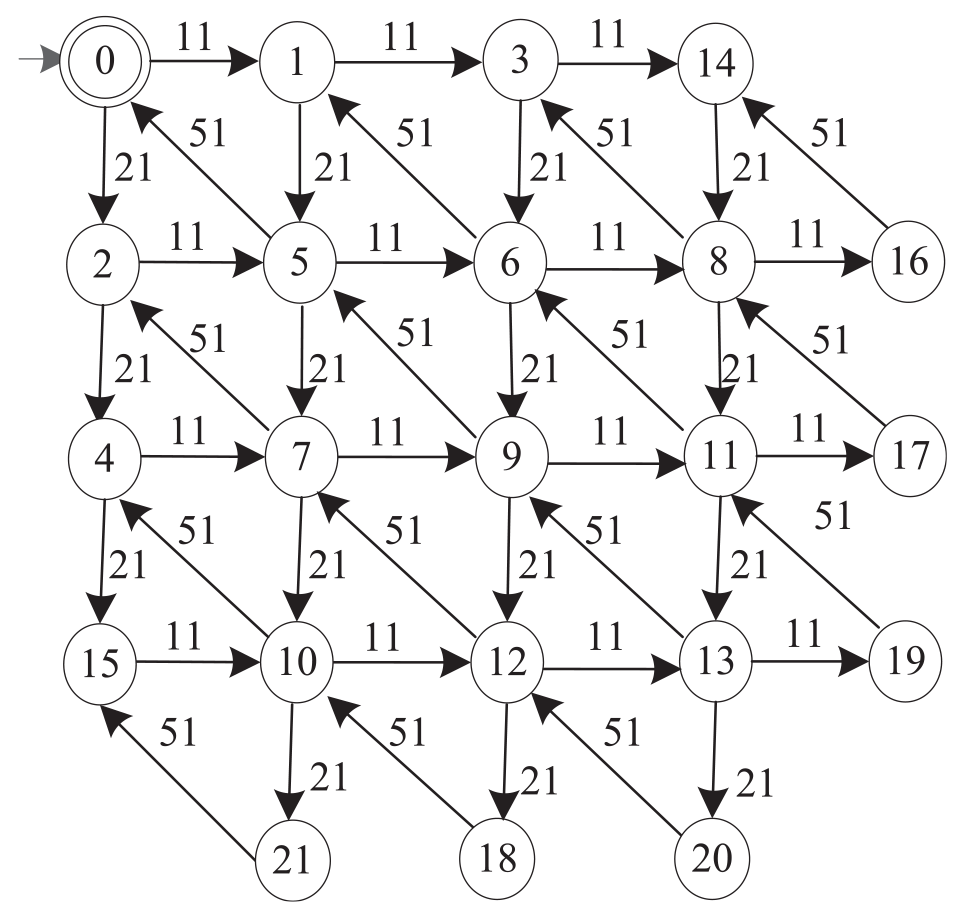
This section elaborates the complete calculation process of the method with the simple example in Figure 1. The automaton M2 has the state set
C1:

C2:

C3: For all pairs of


Automaton M2, and an observable event set
Reachable matrix
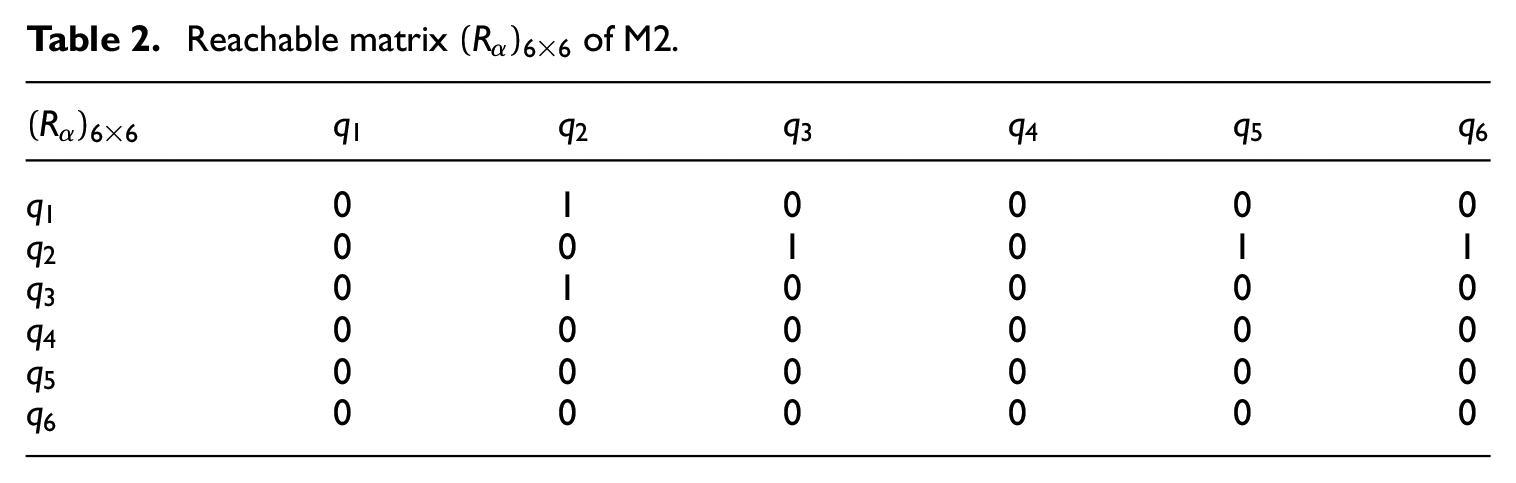
Reachable matrix

Reachable matrix

Supposed matrix

For example, we find

Secondly, if the condition

Note that the symbol


Here,

Thus, if

Therefore, this example is formalized as the following binary linear programming problem. The objective function for the optimization problem is:

subject to the following constraints.







In total, this simple example has 27 variables, 6 linear equalities and 35 linear inequalities. The number of linear inequalities obtained by C3 is 23. The problem is solved by MATLAB with a PC with Intel(R) i7-4600U CPU @2.10 GHz, 2.70 GHz, and 16.0 GB installed memory (RAM). The computation time is 0.0135 s. Table 6 shows the final result of the coarsest quasi-congruence relation for M2, and its state partition is
Allocation matrix


M2 model abstraction based on

The quotient automaton of M2 with respect to
Comparisons of computation methods
This section compares the computation results of three different methods: the classical graph-partition method1,45 implemented in TCT, and the binary linear programming method proposed in this paper which are respectively implemented by mixed integer linear programming (MILP) 55 in MATLAB and binary linear programming in CPLEX (BLP).
Table 7 is a comparison of computing the supremal quasi-congruence relations on the basis of different observable event sets of the automaton M2 by using the stated three methods. Column 1 lists different sets of observable events. Column 2 lists the result using the graph-based partition method implemented in TCT
45
for each
The computational results using MILP and BLP methods are the same as that of using the computation software TCT.
On different sets of observable events, when
In general, however, the smaller the constraint size is, the shorter the run time will be. Moreover, the smaller the number of observable events is, the smaller the number of cosets will be.
Computation results of M2 based on different

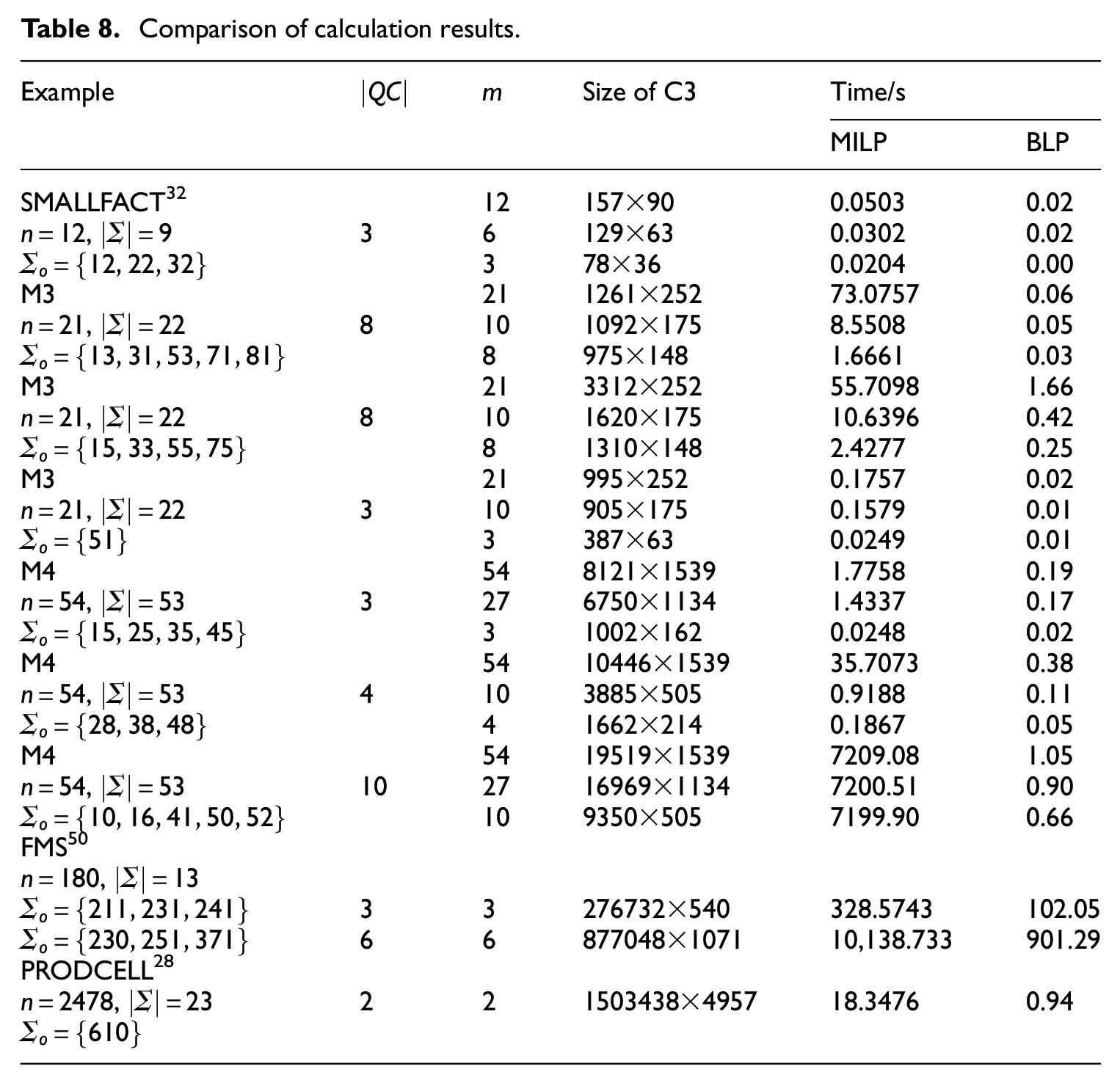
Table 8 summarizes the computation results for a few large examples. Column 1 lists the automata of different sizes, including the corresponding size of state space
For the same automaton and the same observable event set, a tight estimate of
As the state space increases, the calculation time and memory consumption of MILP method also increase, mainly due to the increase of the number of linear inequality constraints C3. When the automaton is not large, the MILP method is efficient.
The BLP method is more efficient than MILP method under the same conditions.
Comparison of calculation results.
An application
The proposed model abstraction method is applied to simplify the supremal nonblocking supervisor of a manufacturing system with five automated guided vehicles (AGVs),1,51 as shown in Figure 4. The simplified supervisor model exposes the control logic hidden in the original large automaton model. The manufacturing system has two input stations IPS1 and IPS2 for parts of types 1, 2; three workstations WS1, WS2, and WS3, each containing a conveyor belt; one completed parts station CPS; and five AGVs. The five AGVs alternately load and unload parts on their own fixed circular routes.

The AGVs system.
The system model consists of five automaton models of the five AGVs, eight automaton models of control specifications.
Figure 5 shows the automaton models of the five AGVs. The states corresponding to the physical zones are illustrated as gray rectangles. The solid and dotted lines represent the loading and unloading of each AGV respectively.
Each of the four shared zones is modeled as an automaton (
Each of the three workstations is modeled as an automaton (
The dotted zone of

The automaton models for the five AGVs.
More details of the AGVs system can be found in Wonham and Cai, 1 Feng and Wonham. 51 The plant model is the synchronous product of the five AGV models. Note that the two values in parentheses respectively represent the number of states and transitions in the automaton model obtained by each calculation.

Compute the specification model

Eight specification automaton models for the AGVs system.
On this basis, the supremal nonblocking supevisor of the AGVs system is

Namely, the full AGVs system consists of 4406 states and 11338 transitions.
The automaton model of the supervisor is too complex to be comprehended. We apply the proposed model abstraction method to simplify the supervisor model so that the control logic becomes clearer. Deadlock arises in many manufacturing systems when the number of being-processed parts in the system is more than a limit. We investigate this limit through the model abstraction method. Type 1 parts enter the system via event
Figure 7 shows the quotient automaton of
The quotient automaton of
Conclusions
In this paper, an optimization process is designed to automatically convert the computation of the coarsest quasi-congruence into a binary linear problem. Partitioning states to cosets is formalized as a binary allocation matrix
A future direction is to apply more computationally efficient solvers, such as satisfiability modulo theories (SMT) and SAT, to compute the optimal state-to-coset allocation problem. Another direction is to apply the same method to compute model abstraction of finite automata with variables, namely the extended finite automata which are easily applicable to the real industrial scale problems.
Footnotes
Acknowledgements
I would like to thank my supervisor and co-supervisor for their help in my study. They helped me with answering questions as well as taking the time to review this paper.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the China Scholarship Council [grant number 201606960044].