
Abstract
Recent advances in three-dimensional printing technologies provide one way not only to speed up freeform fabrication but also to exert programmable control over mechanical properties. Besides, origami-inspired structures, origami-inspired metamaterials, and even origami-inspired robotics primarily demonstrate the promising potential for innovative inspirations of engineering solutions. The motivation of this work is to explore a fully programmable robotic perspective with a fusion of programmable metamaterials, programmable mechanics, and programmable fabrication. First, we proposed an illustrative roadmap for transforming an origami model into a fully programmable robotic system. Then, we introduced an origami spring model and revealed its shape-shifting geometry and intrinsic metamaterial mechanisms, especially the rarely switchable behavior from transverse compression to longitudinal stretchability, and the curvilinear deployment. Furthermore, we addressed the fabrication challenges of three-dimensional printable origami sheets considering three-dimensional printability, foldability with high elasticity, and good damage tolerance. Finally, we developed a fully soft manipulator in terms of the highly reversible compressibility of origami spring metamaterials. And we also devised a peristaltic crawling robot with undulatory movements induced by inclination deployment effect of origami spring metamaterials. Conceivably, the proposed fully programmable robotic system was demonstrated starting from programmable metamaterials, programmable mechanics, and programmable fabrication to programmable robotic behaviors. The contribution of this work also suggested that robotic morphing could be tunable by hierarchical programming from modeling and fabrication to actions.
Introduction
Traditionally, origami is viewed as a long-standing art of folding papers manually where “ori-” means fold and “-kami” means paper. 1 Owing to its predictability, controllability, and scalability, 2 recently it has evolved into an interdisciplinary bridge for scientists and engineers to develop deployable structures,3–5 mechanical metamaterials,6–8 miniature or soft robots,9–12 biomedical devices or capsules,13–15 stretchable or flexible electronics,16–18 electric batteries,19–21 and other innovative possibilities.22,23 Obviously, as an emerging area of research, origami engineering armed with science and technology is full of great vitality and promising prospects.24,25
The phrases of origami-inspired structures, origami-inspired metamaterials, and even origami-inspired robots primarily pointed out the promising potential of innovative inspirations for engineering solutions. Although the inspired motivations, disciplinary bases, and application directions are full of various differences, undoubtedly researchers are all immersed in the novelty and uniqueness of the papercraft-to-engineering bridges. Furthermore, terminologies from different disciplines are increasingly intertwined and assigned to newly created objects. For instance, Correll and Voyles 26 declared a new type of “robotic materials” or “computational metamaterials” that tightly integrated sensing, actuation, computation, communication, and power routing in a periodic fashion. Further for the removal of functional modules or external electronics in soft origami robots, Yang et al. 27 developed a new type of reconfigurable metamaterials called conductive Pt-elastomer backbones for high functional integration with actuation, sensing, and communication. For another example, Yasuda et al. 23 claimed that they developed a non-volatile mechanical memory storage device based on the versatile folding motions of volumetric origami.
In addition, the fabrication techniques of origami-inspired objects are closely related to the digitally subtractive processes (e.g. laser cutting, photolithography, and etching) or three-dimensional (3D) printing. 28 Therefore, many researchers introduced the terms of printable robotics 29 or 3D printable robotics 30 to mainly emphasize the fast, low-cost, and direct digital fabrication method for real-world robotic applications. Especially, the advent of 3D printing of ease of use and low cost offers the possibility to rapidly construct a wide range of printable robotic adaptations, 31 for example, low-cost printable robots in education, 32 as well as exoskeletal devices.33,34 Clearly, we further have noted the junction between origami-inspired printable robotics and soft robotics, and the latter is another young and interesting robotic paradigm.35,36
More deeply, we had insight into that the words “programming” or “programmable” were used to define some metamaterials,6,7,8 robots, 37 and broadly shape-shifting operations.38,39 In particular, 3D printing provides an alternative route to the programming of shape-shifting: the spatial arrangement of active or passive elements. On the other hand, the 3D printing process of precisely on-demand placing materials at predefined locations could be also programmable. 40 Conceivably, it is no longer unreachable for a fully programmable robotic system starting from programmable material accumulation forming, programmable metamaterials, and programmable mechanics to programmable robotic behavior. Here, the motivation of this work is to explore the intersections among the origami-inspired metamaterials, soft robotics, and 3D printing, and to address the programming challenges considering 3D printability, foldability, and mechanical properties when transforming from an origami structure to a fully programmable robot.
Related work
From mechanical metamaterials to metamaterial mechanisms
Initially, the term metamaterial is originated from the fields of optics and electromagnetism. 41 During the last few years, the concept of “mechanical metamaterials” has emerged and attracted great interests due to their unusual material properties beyond naturally available materials. 42 Metamaterials are rationally designed artificial materials that gain their properties from the geometries and structures of repetitive units rather than the bulk material composition. 43 An early example of mechanical metamaterials is auxetic metamaterials, that is, materials with a negative Poisson’s ratio. 6 In recent two decades, many more man-made materials with counterintuitive mechanical properties have joined the family of metamaterials. From historical perspectives of metamaterials, Yu et al. 44 systematically provided a critical classification of mechanical metamaterials into strong, lightweight, pattern transformation with tunable stiffness, negative compressibility, pentamode metamaterials, and auxetic metamaterials in terms of their effective modulus and Poisson’s ratio based on the fundamental material mechanics. More recently, new classes of metamaterials inspired by interdisciplinary research are increasingly emerging, such as transformable metamaterials, 45 voxelated metamaterials, 46 phase-transforming metamaterials, 47 programmable mechanical metamaterials, 7 shape-matching metamaterials, 48 and others. Academically, more and more functionalized metamaterials have blurred the boundaries between material, structure, mechanism, and even robotics. For instance, Ion et al. 49 claimed that they have pushed the concept of metamaterials from material category to mechanism scope and the 3D cell grids designed by them could transform input forces and movement into a desired set of output forces and movement. Furthermore, the evolution of metamaterials is pioneering a paradigm shift in such diverse fields as materials, machines, and robots. Mark et al. 50 presented an inchworm-type soft robot based on complementary material properties of normal and auxetic metamaterials.
Origami-inspired metamaterials and robots
To achieve counterintuitive mechanical properties, inspired sources for metamaterial construction have been explored from mechanics theory to bionic material including extreme effect, negative effect, size effect, non-linear effect, multi-stability, and ultra-property. In addition to mechanics approaches, the art of origami is now being accepted as an intuitive and fertile inspiration for mechanical metamaterial design due to its foldability, deployability, flexibility, scale-free geometry as well as programmable reconfiguration. For example, Kamrava et al. 51 proposed a new class of Miura-ori pattern-inspired cellular metamaterials with a wide range of interesting properties such as auxeticity, bistability, foldability, and self-locking. Filipova et al. 52 introduced an origami tube zipper-coupling approach for constructing a variety of cellular origami metamaterials that can be deployed, stiffened, and tuned. Inspired by a type of modular unit-based origami (snapology), Overvelde et al. 45 presented a 3D transformable mechanical metamaterial whose shape, volume, and stiffness can be actively controlled with multiple degrees of freedom. Zhai et al. 53 introduced an on-demand deployable and selectively collapsible origami-inspired mechanical metamaterial whose configurations and stiffness are greatly tunable, depending on different states and loading paths.
For complex, iterative, or fine origami-inspired 3D structures, they are easy to be fabricated in flat sheets or laminates, and then folded or rolled into 3D forms. This led to further development of miniaturized robots as well as soft robots. For minimally invasive surgery, Miyashita et al. 54 presented an origami-based robot that is ingestible and can be controlled to move, manipulate, and accomplish clinically relevant tasks, such as removing a foreign body and patching a wound in the stomach. Salerno et al. 55 presented a shape memory alloy (SMA) actuated, miniaturized origami-enabled robotic end-effector for minimally invasive surgery. In the soft robotic field, Zhang et al. 56 proposed an extensible continuum robot by integrating origami-inspired compliant modules. Jeong and Lee 57 put forward a three-finger robotic manipulator based on an origami structure called twisted tower. Li et al. 58 proposed architecture for fluid-driven origami-inspired artificial muscles with potential applications ranging from miniature medical devices to wearable robotic exoskeletons to large deployable structures for space exploration. Li et al. 59 proposed a lightweight, vacuum-driven soft robotic gripper made of an origami “magic-ball” and a flexible thin membrane. Vander Hoff et al. 60 developed a thread-actuated origami robot for manipulation and locomotion. Taking the inspiration of the intricately folded wings of a ladybird beetle, Baek et al. 61 presented a new compliant origami mechanism and further created a deployable glider module as well as a jumping robot.
Programming strategies for 3D printable deformable objects
Shape-shifting of initially flat materials into programmed 3D configurations is an emerging area of research, is an alternative design route for fabrication of complex 3D shapes, and holds a lot of promise for medical application, flexible sensors/actuators, self-folding devices, and origami-based metamaterials. 37 Van Manen et al. 38 summarized the different programming strategies from two-dimensional (2D) sheet to 3D form including anisotropic bilayers, multiple material tessellations, mechanically induced buckling, sequential shape-shifting, and so on. Yuan et al. 40 explored the relationship among folding angles, fiber orientations, and applied loads during programming to find the optimized fiber arrangement and loading directions for 3D printed active composites. Ge et al. 62 printed active composites with shape memory polymer fibers precisely into an elastomeric matrix and used them as intelligent active hinges to enable origami folding patterns. Van Manen et al. 39 presented a novel shape-shifting technique that requires only a hobbyist 3D printer based on simultaneously printing and programming shape memory polymer materials in a fully automated and single-step production process. Mirzaali et al. 48 demonstrated soft shape-matching metamaterials that are designed by rationally combining auxetic, conventional, and transitional unit cells into a cellular solid, and are indirectly additively manufactured from elastomers. Goswami et al. 63 applied a Voronoi tessellation algorithm to the surface of any primitive solid, and worked out a form of low-density programmable matter with high-level robotic motions, and fabricated these architected soft machines by 3D printing. Jiang et al. 64 fabricated dissolvable hollow scaffolds by projection microstereolithography then to indirectly create a class of mechanical metamaterials in nearly arbitrary 3D architectures of highly stretchable elastomer lattices. Schumacher et al. 65 proposed to create 3D objects with spatially varying elastic properties using 3D printable microstructures drawn from a pre-computed metamaterial family. Learning from the “dual-mode” morphing mechanism of the Pelican eel’s head structure, Kim et al. 66 designed entirely soft and dual-morphing origami structures, and they fabricated several soft robotic prototypes using 3D printing.
Transforming origami-inspired metamaterials into fully programmable robots
Main procedure
Generally, a software program consists of main functions and subroutines. Similarly, we described the basic steps how to transform an origami model into a fully programmable robotic system using Figure 1.
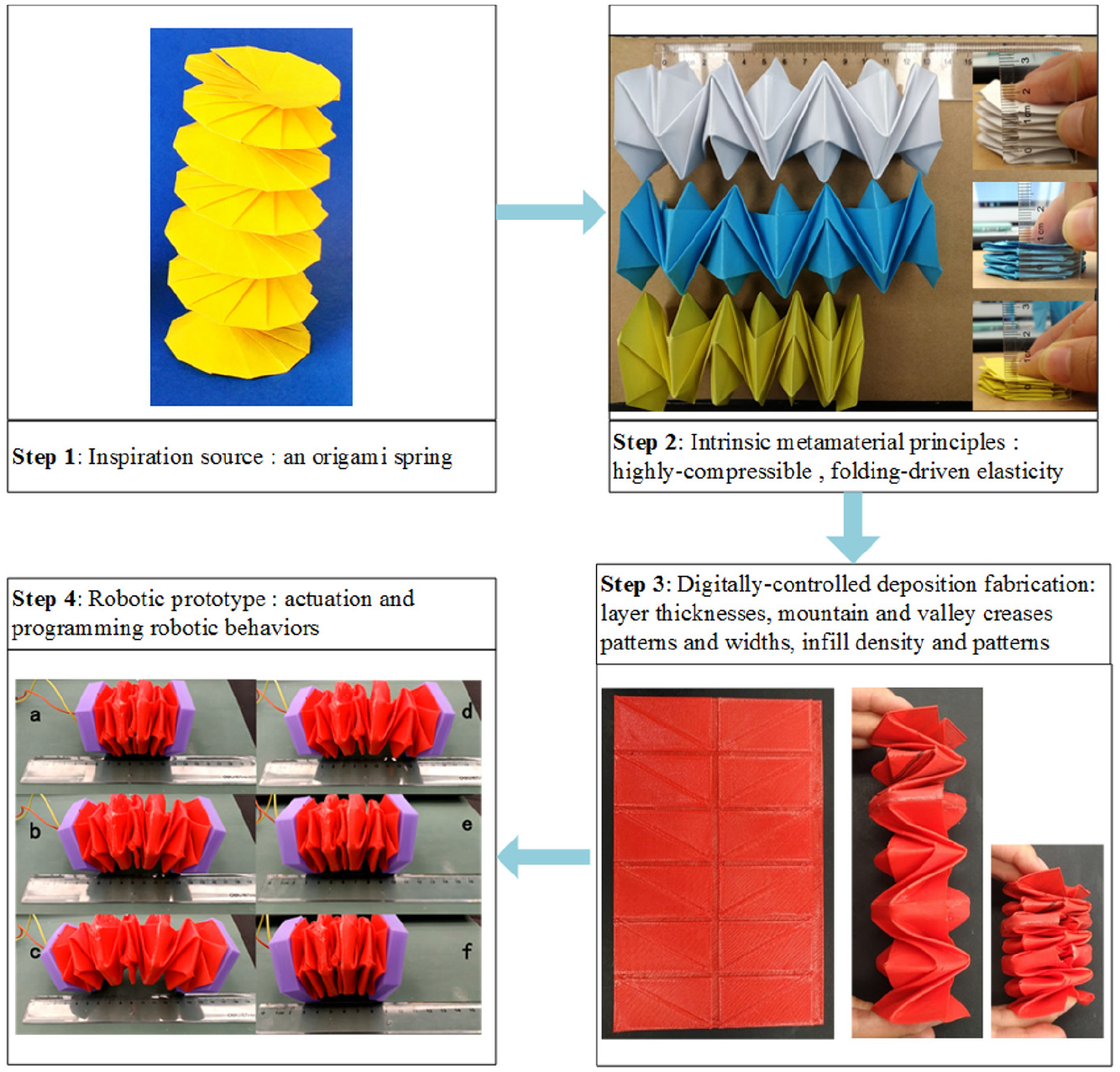
Flowchart of transforming an origami model into a fully programmable robotic system.
At first stage, we selected a foldable origami spring 67 as the inspired starting point. Next, we explored the intrinsic metamaterial characters, such as the collapsible and reconfigurable elasticity, or the tunable large-strain tensile and compressive properties. Clearly, these transnormal properties are derived from the foldable and periodic geometry structure rather than the mother material. Instead of manually folding papers with negligible or zero thickness, we further investigated the digital fabrication approach of creating the metamaterial sheet with programming parameters: crease patterns, widths, and orientation (i.e. mountain or valley), as well as material infill paths and density. At last, we presented a robotic prototype with peristaltic crawling behaviors depending on the highly reversible stretchability and compressibility of the 3D printed collapsible metamaterials. In summary, the concepts presented here highlight a new type of robotic programmability achieved hierarchically from origami-inspired metamaterial geometry and controllable material placing to robotic behaviors.
Geometry of paper spring
As depicted in Figure 2, the collapsible spring is formed by folding and twisting a rectangular piece of paper with the crease pattern of uniform right triangles. Where n and m denote the vertical and horizontal divisions of the pattern respectively, after careful and patient folding work, n would be the sides of a fan-like circle, m is the numbers of sections as Min 67 described as modules or layers. The relationships among the pattern parameters can be defined as follows


Geometry of the paper spring from crease pattern to spiral form.
Since B is decided by the size of the paper and m can be an arbitrary number, n and
Intrinsic metamaterial mechanisms of paper spring
As illustrated in Figure 3, there are four basic stable states for the paper spring deformation: completely compressed state, natural placement, longitudinal deployment due to transverse compression, and deployable limit under longitudinal stretching. From the top view, when the paper spring is being deployed, the width of the spring shrinks in a spiral manner and the overlapping areas between fans increase until complete overlapping in the maximum deployable state. Clearly, the strain values and strain energies from a state to another not only depend on the pattern parameters but also are closely related to the paper thickness, paper material elasticity as well as softening degree on the creases by hand during folding operations. However, this complexity does not prevent us from experimentally observing the intrinsic metamaterial mechanisms of the paper spring.

Intrinsic metamaterial mechanisms of the collapsible paper spring: (a) Status #1–#2: highly reversible compressibility, (b) status #2–#3: good switchability between transverse compression and longitudinal stretchability, and (c) status #4: curvilinear deployment.
Easily, we can use the angle value of the circle gap from the top view to offer a quantitative analysis for the collapsible paper spring. The central angle of the circumscribed circle with n edges can be formulated by

Undoubtedly, if given a paper with length A and width B, the central angle will depend on the divisions n and m. Usually, we should control the central angle less than 360° to get the better collapsible ability.
Clearly in the analytical model above, we have supposed the paper thickness is zero or negligible. But for higher elasticity, the paper also needs a higher thickness. If we use t to denote the paper thickness, the length of the edges of the uniform right triangles will have a decrease by t, so the essential parameter

Meanwhile, the length of some edges of the uniform right triangles will not decrease because it is on the outer edges of the paper sheet, as shown in Figure 4 of the following section. This factor will cause some right triangle unit deflection with the theoretical status. Although the changes of some angel
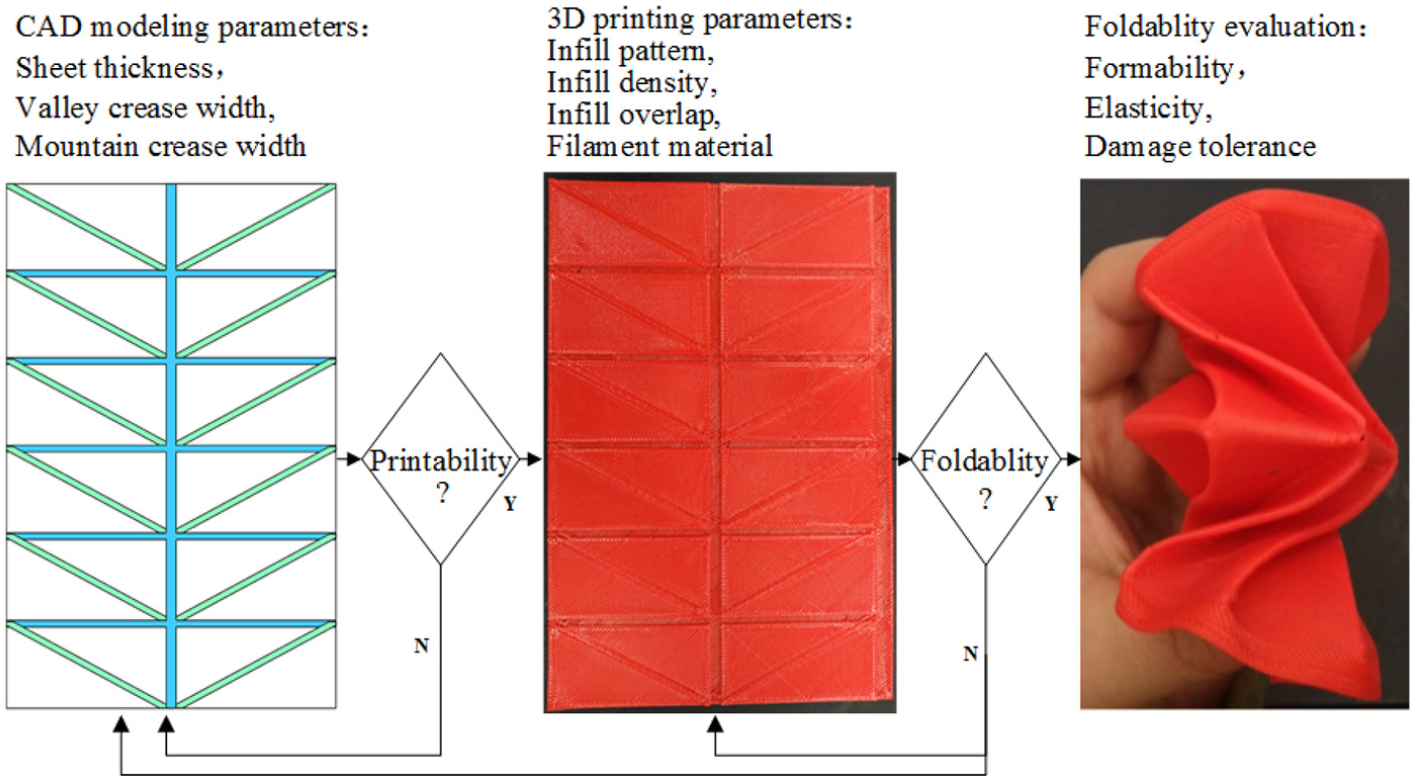
Digital fabrication flowchart of origami-inspired spring metamaterials.
Roughly, we can also give the relationship between the longitudinal stretchability

Here, one of the paper springs that we folded intuitively revealed exotic mechanical behaviors that even never appeared in natural materials or other mechanical mechanisms. First, we can see that the paper spring poses large-strain tensile and compressive properties, respectively, about 230% and 300% in the given example. Especially, we further observe that the paper spring features an unprecedented capability of ultrahigh reversible longitudinal stretchability under little compression transversely. This switchable character between the transverse compression and longitudinal stretchability is mainly resulted from the interactions of overlapping fans when the horizontal forces act on it. Obviously, it breaks the common sense, and we claim this paper spring is a veritable new type of metamaterial.
Digital fabrication approach of origami-inspired spring metamaterials
Although the metamaterial mechanisms of origami-inspired spring have been demonstrated through the above-mentioned analysis, this type of spring metamaterial still encounters one fundamental engineering obstacle: manufacturability. Folding and twisting papers with negligible or zero thickness require a complex sequence of dexterous hand manipulations, and current manufacturing technologies cannot imitate this process entirely. Therefore, we attempted to explore the digital fabrication approach of this origami-inspired spring metamaterial harnessing the 3D printing technology of fused deposition modeling (FDM) method.
FDM is a layered manufacturing technology that produces parts with complex geometries by the layering of extruded materials, such as acrylonitrile butadiene styrene (ABS) plastic or polylactic acid (PLA). 68 From the process of digital material accumulation, additive manufacturing part properties depend on structural and process parameters rather than purely on material properties. More concretely, 69 the mechanical properties of a 3D printed specimen can be represented as a function of layer number, thickness, raster orientation, infill density, infill pattern, and so on. To a certain extent, the digitally FDM fabrication is not only a rapid freeform solidification process but also a programmable control method over mechanical properties. 70
In this work, as the framework depicted in Figure 4, we explored the digital fabrication approach transforming the geometry of the origami-inspired spring metamaterial into the programmable mechanics. In most cases, building directions, layer thickness, infill percentage, flow rate, and other parameters are critical for part cost, performance, and efficiency.71,72 However, due to the thinness of module sheet, the foldability with high elasticity and damage tolerance are closely related to the infill pattern and infill overlap degree. Considering the actual capability of our own 3D printer, we employed 1.75-mm PLA filament and 0.3-mm-diameter FDM nozzle. According to Table 1, we have carried out experiments and finally got the third parameter combination that could digitally work out the origami-inspired spring metamaterials. It must be acknowledged that some of the experimental data failed during the printing process, that is to say, the 3D printability did not meet the requirements. This is also the reason why there are many repeated closed-loop correction feedback in Figure 4.
Experimental data.

As illustrated in Figure 5, according to our test, the maximum spring deformation stiffness of our 3D printed specimen is about 2 N/mm, about 10 times of paper model of the same structure. Undoubtedly, the 3D printed origami-inspired spring metamaterials can be viewed as artificial muscles 60 for different robotic applications. Therefore, we further attempted to transfer its intrinsic mechanical properties into robotic behaviors and demonstrated the potential.

Origami-inspired spring metamaterials and their elasticity.
Robotic prototype of origami-inspired metamaterials
A fully soft manipulator using highly reversible compressibility
First, in terms of the highly reversible compressibility of origami-inspired spring metamaterials, we developed a fully soft robotic arm with a three-finger gripper, as shown in Figure 6. Obviously, this is a fully soft manipulator under cable driven controlling the contraction and elongation of origami-inspired spring metamaterials, as well as the convergence actions of three soft 3D printed fingers. Our pick-and-place experiments suggested this type of soft manipulator has many good points, including fully 3D printability and good applicability for irregular objects.
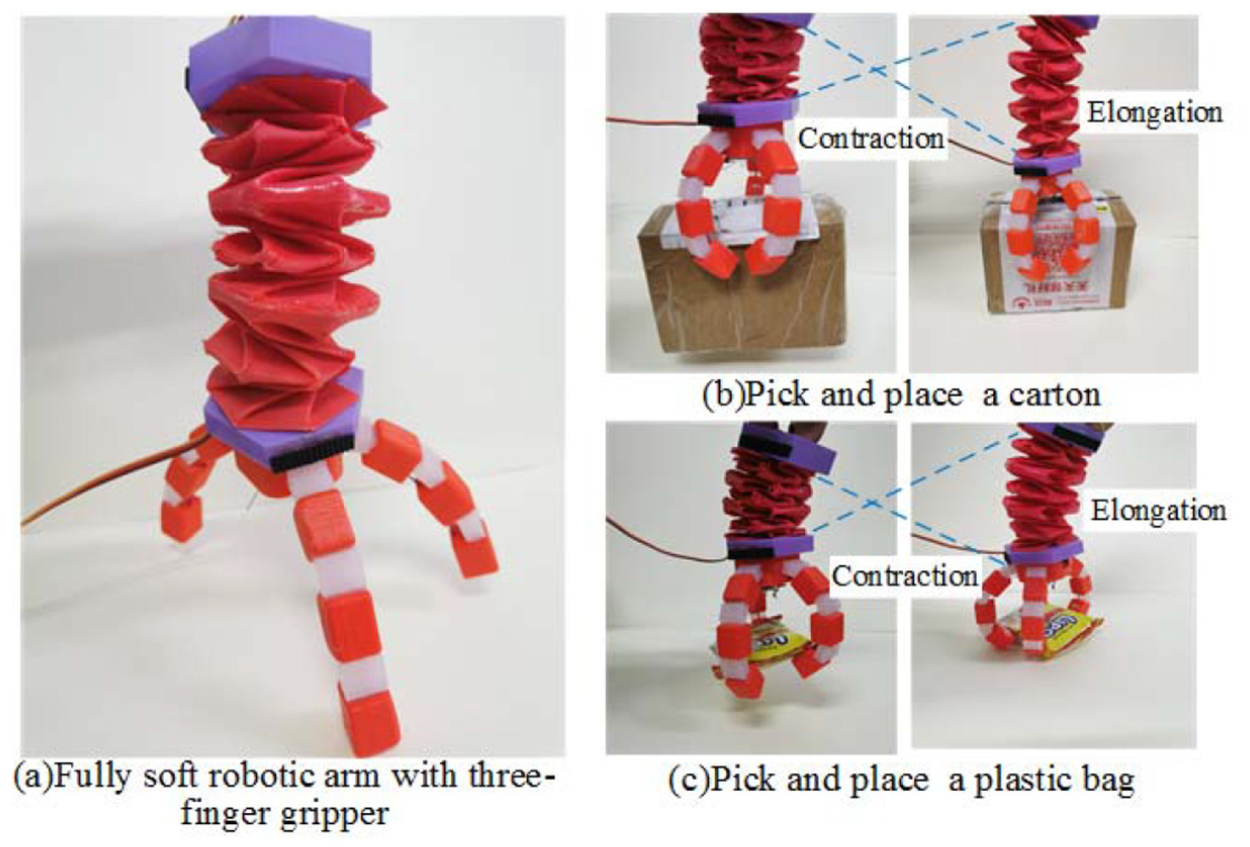
A fully soft manipulator with a highly reversible compressible arm: (a) fully soft robotic arm with a three-finger gripper. (b) Pick and place a carton. (c) Pick and place a plastic bag.
A peristaltic crawling robot using the undulatory properties induced by relaxing compressive modules
As we pointed out above, due to the non-negligible thickness, deviations will occur in every module of origami-inspired spring metamaterials. It happened to be that this was exactly how we developed a peristaltic crawling robot by imitating undulatory movements of segmented worms. As illustrated in Figure 7, three modules of paper spring were taken as an example, due to the curvilinear deployment, relaxing the compressive modules while simultaneously flexing the middle module will subsequently cause the entire body to locomote forward, 73 if the slip in the reverse direction is temporarily ignored. Theoretically, we can also geometrically predict the step size, but this would be never more accurate than the actual gait value. Technologically, we install the gear motor at the end, winding the rope to compress the metamaterial spring. Besides, the motor and enclosure weight would increase friction to offset the reverse slip during relaxing. As illustrated in Figure 8, experiments had revealed that the worm-like robot could move forward with a speed of about 2 cm in a gait cycle every 5 s (Supplementary Movie 1).

Schematic representation of undulatory movement of origami-inspired spring.

A peristaltic crawling robot with undulatory movements induced by curvilinear deployment. (a) Fully compressed state; (b) elongating state; (c) fully curvilinear deployment; (d) starting to compress; (e) compressing sate; and (e) fully compressed state.
Conclusion
In this study, we focused on the intersections among the origami-inspired metamaterials, soft robotics, and 3D printing, and mainly presented a fully programmable robotic perspective with the fusion of programmable metamaterials, programmable mechanics, and programmable fabrication.
First, from the research context of our literature review, it can be claimed that the intrinsic metamaterial mechanisms of the origami spring model were revealed from three aspects: highly reversible compressibility, good switchability between transverse compression and longitudinal stretchability, and curvilinear deployment. Second, viewing 3D printing as a programmable control method over mechanical properties, we experimentally addressed the fabrication challenges of origami sheet in terms of 3D printability, foldability with high elasticity, and good damage tolerance.
Finally, we robotized the proposed and successfully fabricated origami metamaterials into two types of soft robots. It is worth mentioning that the curvilinear deployment of the collapsible paper spring subtlety offers the undulatory movements for the peristaltic crawling robot. This greatly simplifies the structure and control of the creeping robot by comparing with existing systems. This interdisciplinary vision based on metamaterials, origami engineering, digital fabrication, and soft robotics undoubtedly opens up a broader road for robotic innovations.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The project was supported by the planning subject for the 13th 5-year plan of Beijing education sciences (No. CDDB19163).
Data availability statement
All data generated or analyzed during this study are included in this article.
Supplemental material
Supplemental material for this article is available online.
Author biographies
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.