
Abstract
To improve the real-time capability, adaptivity, and efficiency of the energy management strategy in the actual driving cycle, a real-time energy management strategy is investigated for commute hybrid electric vehicles, which integrates mode switching with variable threshold and adaptive equivalent consumption minimization strategy. The proposed strategy includes offline and online parts. In the offline part based on the historical traffic data on the route of the commute vehicle, particle swarm optimization is applied to optimize all the thresholds of mode switching, equivalence factor of the equivalent consumption minimization strategy, and the engine torque and speed at the engine-alone propelling mode so as to establish their mappings on the battery state of charge and power demand. In the online part, the established mappings are involved in the energy management supervisor to generate timely appropriate mode switching signals, and an adaptive equivalence factor for instantaneous optimization equivalent consumption minimization strategy and the optimal engine torque and speed at engine-alone propelling mode. To fully demonstrate the effectiveness of the proposed strategy, the simulation results and comparison with some other strategies and the benchmark dynamic programming strategy are presented by implementing the strategies on the GT-SUITE test platform. The comparison result indicates that the control effect of the proposed energy management strategy is much nearer to that of the benchmark dynamic programming than those of other strategies (the rule-based control, the conventional equivalent consumption minimization strategy, the adaptive equivalent consumption minimization strategy, the rule-based-equivalent consumption minimization strategy, and the stochastic dynamic programming strategy) with the respective improvement in fuel efficiency by 25.9%, 13.25%, 4.6%, 1.32%, and 1.13%.
Keywords
Introduction
In the face of the dual crises of energy and the environment, hybrid electric vehicles (HEVs) are being in the process of gradually replacing traditional fossil-fueled vehicles. As is well known, HEVs can use the electrical power stored in the battery to propel the vehicle; thus the energy management strategy (EMS) controlling the engine and electrical power-split flows are crucial for reducing fuel consumption and exhaust emission. Generally, the objective of the EMS is to reduce, as much as possible, the fuel consumption under the condition of satisfying the overall vehicle power demands and the battery state of charge (SOC) remaining within a prescribed range (non-plug-in) or achieving the minimum limit value (plug-in) at the end of the driving path.
From the global optimization view, dynamic programming (DP)1,2 would be likely the ideal design for the EMS. However, due to the uncertain real driving cycles, the EMS designed offline based on DP is not feasible in practice, but can be regarded as a benchmark to test the optimization efficiency of other EMSs. Consequently, EMS that can cope with the uncertain driving cycle in practice and whose effects are close to the control performance of the DP in theory have been pursued. Stochastic dynamic programming (SDP),3,4 which predicts the most likely future driving cycle by utilizing the statistical characteristics of historical traffic data, and model predictive control (MPC)5–7 with the finite receding horizon optimization based on the short-term prediction for the future driving cycle, are two kinds of measures that are used widely in the study of both near-globally optimal and implementable EMS. However, it should be noted that in these cases the quality of the prediction information and the length of the prediction horizon determine the success of the EMS; also, these techniques are implementable online but tend to require high computational capabilities.
From the view of real-time energy management, the heuristic rule-based (RB) control 8 is realized easily due to its simple structure without a rigorous mathematical model. However, since its control performance depends heavily on rule-switching thresholds defined by the engineering experience, it actually cannot always provide good results in the face of different driving conditions. Thereby, there are several modified RB controllers with optimized threshold parameters using optimization algorithm such as genetic algorithm (GA),9,10 differential evolution algorithm, 11 and particle swarm optimization (PSO).12,13 Another real-time EMS widely applied is the equivalent consumption minimization strategy (ECMS) based on an instantaneous optimization,14,15 which can make decision for the power-split by minimizing the instantaneous cost function consisting of the fuel consumption and an equivalent fuel consumption related to the battery SOC variation. The definition of such a cost function requires an equivalence factor (EF) for comparing the electrical energy with the fuel energy. And it has been shown that ECMS can be regarded as a realization of Pontryagin’s minimum principle (PMP)-based global optimization problem during the whole driving cycle when the chosen EF in the ECMS is linked to the optimal costate of the PMP. 16 Therefore, the EF in ECMS should be varied with the different driving pattern considering the overall power conversion efficiencies and battery SOC constraint. Accordingly, all kinds of ECMS involving proper EFs have been emerged, such as ECMS with adaptive EF,17–21 ECMS with EF optimized by GA, 22 and ECMS with stochastic optimization EF,23,24 which are collectively called adaptive equivalent consumption minimization strategy (A-ECMS).
It should be noted that for HEVs with two power sources, multimode (electric-alone, engine-alone, and both together) operation is inevitable no matter which EMS is used. During the electric-alone propelling, the power demand is entirely provided by the motor without optimizing the power-split, while during the engine-alone propelling, the power demand is entirely provided by the engine and it would be better to make the engine operate at nearby its best operating line for fuel efficiency. Only during both together propelling, the power demand is allocated to the engine and motor using the optimization-based EMS. Although the optimization-based EMS is used in the whole operation modes, during engine or motor-alone propelling mode, the power demand is distributed only to the engine or the motor via the EMS according to the current vehicle states. Accordingly, the mode switching signals can be first determined according to the current states of vehicle, and the optimization-based EMS is only applied to split the power demand during propelling jointly, but the determination of switching signals becomes one of the key factors. The switching between two modes can be usually determined by the predefined SOC or/and power demand constant thresholds like the heuristic RB control. However, the thresholds of mode switching are ambiguous and depend heavily on the current battery SOC and the power demand. Consequently, if variable thresholds of mode switching and a real-time adjustable EF of ECMS are introduced into the EMS, the real-time capability, adaptivity, and efficiency of the proposed strategy would be effectively improved during the actual driving circumstance.
Motivated by this, a novel real-time EMS is designed for commute HEVs in this article, which integrates mode switching with variable thresholds and A-ECMS according to multimode operating characteristics. The feature of the proposed strategy compared with the existing results is that the variable thresholds of mode switching signal, the adaptive EF of ECMS, and the engine torque and speed at the engine-alone propelling mode are established as the mappings of the battery SOC and the power demand using PSO based on the historical traffic data on the route. The established mappings are involved in the real-time energy management supervisor and can online generate appropriate mode switching signals, an adaptive EF for the instantaneous optimization ECMS, and the optimal engine torque and speed at engine-alone propelling mode during real driving cycle so as to effectively improve fuel economy in facing different traffic situations and ensure the real-time capacity of the management strategy. The effectiveness and advantage of the proposed strategy are validated by comparing with the practical RB, ECMS, and RB-ECMS control schemes, the benchmark DP, and the existing SDP and A-ECMS strategies carried on the GT-SUITE test platform under the same driving surroundings.
The remainder of this article is organized as follows. Section “HEV powertrain description” describes the studied powertrain structure and the control-oriented power-split model. Section “EMS integrating variable threshold mode switching and A-ECMS” presents the design of a real-time EMS integrating mode switching with variable thresholds and A-ECMS. Section “Validation on GT-SUITE test platform” presents simulation results and comparisons with several other strategies carried out on GT-SUITE test platform to demonstrate the advantage of the proposed strategy. Finally, the last section draws the conclusion.
HEV powertrain description
The architecture of the studied HEV is shown in Figure 1.

Architecture of the hybrid electrical vehicle.
It contains an engine, two motors, and a battery pack. The engine, motor, and generator are connected to the carrier gear, ring gear, and sun gear of the planetary gear set, respectively.
Considering the tire rolling resistance, aerodynamic drag, climbing resistance, and hydraulic brake torque, the vehicle motion equation is described as follows

where v and M are velocity and weight of vehicle,
The battery electric model is usually described by an idealized zero-order equivalent-circuit model including a voltage source and an internal resistance in series, so the dynamics of battery SOC can be represented as:

where

where
The relation of the driver power demand

where
Moreover, under the assumption of no friction losses and rigid connection, the relationship of the speed of the connected components can be expressed as

where R is the radii and its subscript r, s represents ring gear and sun gear, respectively.
The engine fuel consumption


where BSFC is the brake specific fuel consumption,
EMS-integrated variable threshold mode switching and A-ECMS
Optimization problem formulation
As in the analysis above, during the whole operating cycle of the HEV with two power sources, multimode propelling individually or jointly is inevitable, the engine should operate at nearby its best operating line for fuel efficiency when it works, and the power demand is split via the optimization-based EMS only during propelling jointly. Thus, the mode switching signals can be first determined according to the current states of the vehicle. Moreover, the battery SOC and driver power demand would severely impact the control decision, so that they are selected as the state variables to determine the mode switching. However, the threshold parameters of the mode switching are ambiguous and varying with the current battery SOC and power demand rather than the predefined SOC or/and power demand threshold constants. The sketch of mode switching with variable thresholds for HEVs is shown in Figure 2.

Sketch of mode switching with variable thresholds.
In the figure, the region with the red circle points represents the engine-alone propelling mode, named as Mode 1, the region with the green square points represents the motor-alone supplying the power for the vehicle, named as Mode 3, and the region with the blue star points represents engine and motor propelling together, named as Mode 2. Meanwhile, the points circled in black schematically illustrate the probable switching thresholds from one mode to another according to the different system states.
The specific switching thresholds from one mode to another can be determined by optimization and are established as mappings of the battery SOC and the power demand. Moreover, at the engine-alone propelling Mode 1, the engine torque and speed working at the best operating points can also be optimized by minimizing the fuel consumption (equation (6)) to form the mappings of the battery SOC and power demand. At Mode 2, the optimal power-split between the engine and the motor can be determined by ECMS solving the following instantaneous optimization problem


with the following physical constraints

where T is the sampling period in the actual implementation of ECMS. In the later simulation test, T = 20 ms.
However, it should be noted that for Mode 2, the EF of ECMS would be a key optimized control parameter for the different system states. Consequently, the adaptive EF will be introduced, which can be optimized using PSO to establish the mapping of the battery SOC and the power demand. As a result, the control parameters that will be optimized offline include the mode switching signal, namely, variable thresholds, the adaptive EF, and the engine torque and speed at the engine-alone propelling Mode 1. The optimization will be accomplished using PSO based on historical traffic data, which is as follows in detail.
Optimal solution to control parameters
For using PSO algorithm to optimize the control parameters, there are the following definitions:

where
In the PSO algorithm, the personal best position and the global best position of


where
The flowchart using PSO algorithm for the optimization of the control parameters is shown in Figure 3. It should be noted that there is a nested loop between the optimization of the control parameter

Flowchart optimizing control parameters using PSO.

Iteration of the best fitness value of all particles.
Figure 5 shows the established mappings of the control parameters according to the optimum solution of

Mappings of control parameters established by PSO: (a) mode type, (b) equivalence factor at Mode 2, and (c) engine torque and speed at Mode 1.
The established mappings of the control parameters will be embedded in the real-time EMS to online generate mode switching signal, adaptive EF of ECMS, and the desired engine torque and speed at Mode 1 according to the current system states for effectively improving fuel economy in facing real driving cycles.
Validation on GT-SUITE test platform
The benchmark HEV simulator on the GT-SUITE test platform is used to verify the effectiveness of the proposed EMS. The HEV model described in Section “HEV powertrain description” is a control-oriented model, but the model in the GT-SUITE HEV simulator is further detailed in order to simulate the real vehicle powertrain more realistically. The HEV system with the proposed EMS in the simulation is constructed as shown in Figure 6.

Schematic representation of HEV with the EMS in the simulation.
Moreover, the parameters and specifications of the model components are listed in Table 1. 25
Basic vehicle parameters in the simulation.

ICE: Internal Combustion Engine.
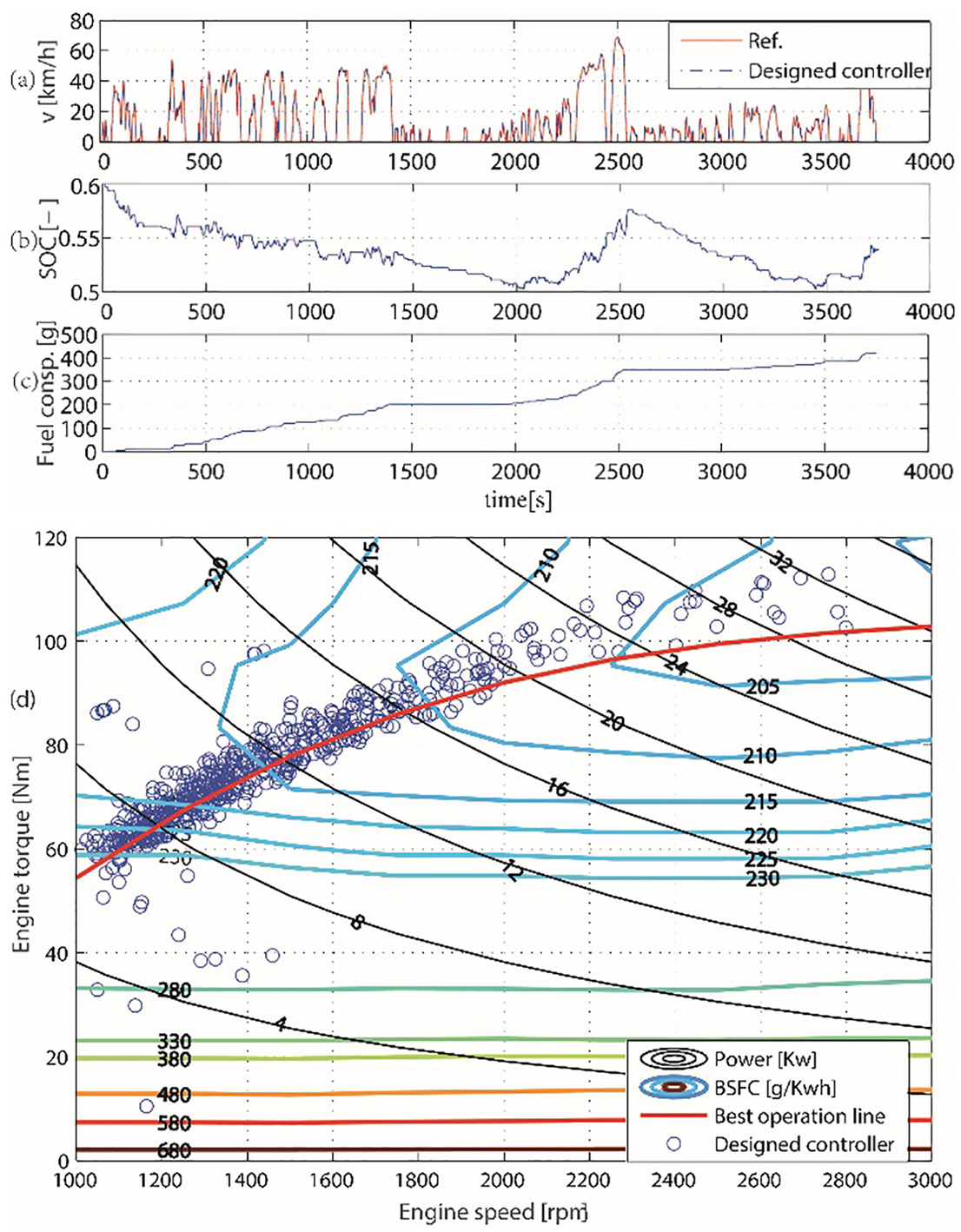
To demonstrate the effectiveness of the designed EMS, the actual driving speed profiles of 3 days from Yasui 25 are used for the test, and the simulation results are shown in Figures 7 –9, respectively.
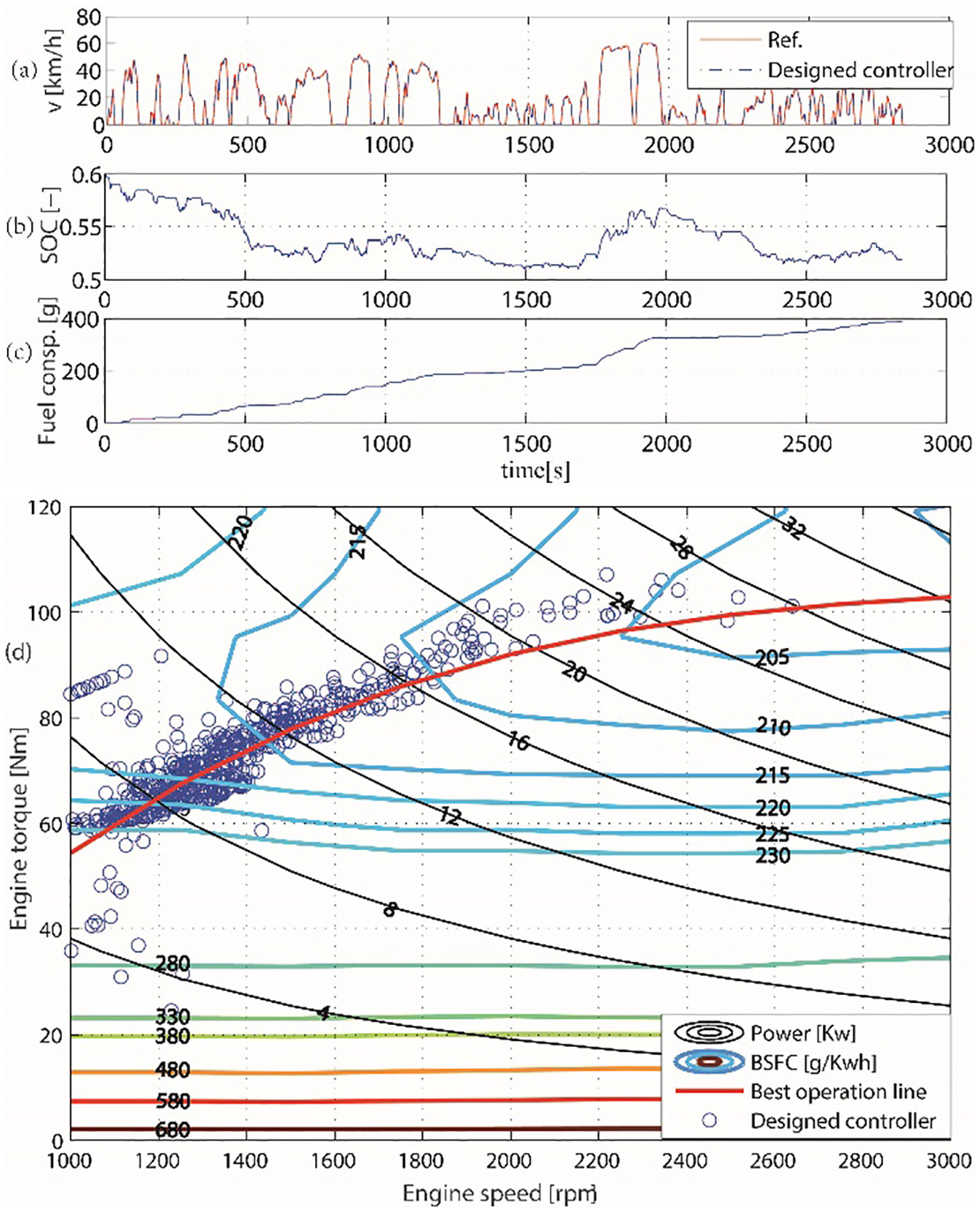
Simulation result for the first Monday driving cycle.

Simulation result for the second Thursday driving cycle.
Simulation result for the third Wednesday driving cycle.
Moreover, to clarify the control performance, the performance indices (determination coefficient R2 between the actual speed and reference, final value of SOC, and total fuel consumption) resulting from Figures 7 –9 are summarized in Table 2.
Summarization of control performance.

SOC: state of charge.
It can be seen from Figures 7 –9 and Table 2 that the good drivability is verified from the actual vehicle speed trajectory tracking to the reference speed, and the SOC trajectory is limited to the restricted ranges of the battery in non-plug-in HEVs. Moreover, the operating points of the engine are distributed highly surrounding best operating line.
To further demonstrate the advantage of the proposed EMS in the performance improvement, the comparison results with some practical strategies (the RB control, the conventional ECMS (CECMS), and the RB-ECMS) are given based on the same simulation environment in actual driving speed profiles of another 2 days from Yasui, (2012), 25 shown in Figures 10 and 11, respectively.

Comparison results for the first Wednesday driving cycle.

Comparison results for the third Tuesday driving cycle.
Meanwhile, to facilitate analysis of the comparison results on the fuel consumption of the different strategies, the respective fuel efficiency expressed by the moving distance per liter (km/L) resulting from Figures 10 and 11 are summarized in Table 3, where the quantitative value is calculated by Petrol No. 93 with the density 0.725 kg/L.
Comparison with the practical strategies.

RB: rule-based; ECMS: equivalent consumption minimization strategy; CECMS: conventional ECMS.
It can be seen from Figures 10 and 11 that the good drivability and the physical limit of battery SOC variation are ensured by all the strategies. However, except for the overlap region, the engine operating points of the RB algorithm are dispersive and there are relatively more points in the region with relatively high speed and low torque; meanwhile, the engine operating points of the CECMS are mostly at the region with relatively low speed and high torque. In contrast, the engine operating points of the RB-ECMS and the designed EMS are distributed highly surrounding the best operating line, which means high engine efficiency and low energy consumption.
Table 3 indicates that compared with the other three strategies, the proposed strategy can improve the fuel efficiency by 25.9%, 13.25%, and 1.32% on a 2-day average, respectively. Obviously, the designed EMS is the best in the four energy management controllers.
Finally, the real driving cycle data of workdays in 3 weeks from Yasui 25 are utilized to test the fuel efficiency performance of the proposed strategy by comparing with the existing EMSs in the literatures. Here, the SDP strategy 4 and the A-ECMS 24 are considered since the results shown in Jiao and colleagues4,24 are researched on the identical benchmark testing environment and condition (the same vehicle model, the same simulation software, the same driving cycles). Moreover, the comparison with the DP is also presented for the benchmark. The fuel efficiency results of the four energy management strategies are listed in Table 4.
Fuel efficiency of different strategies.
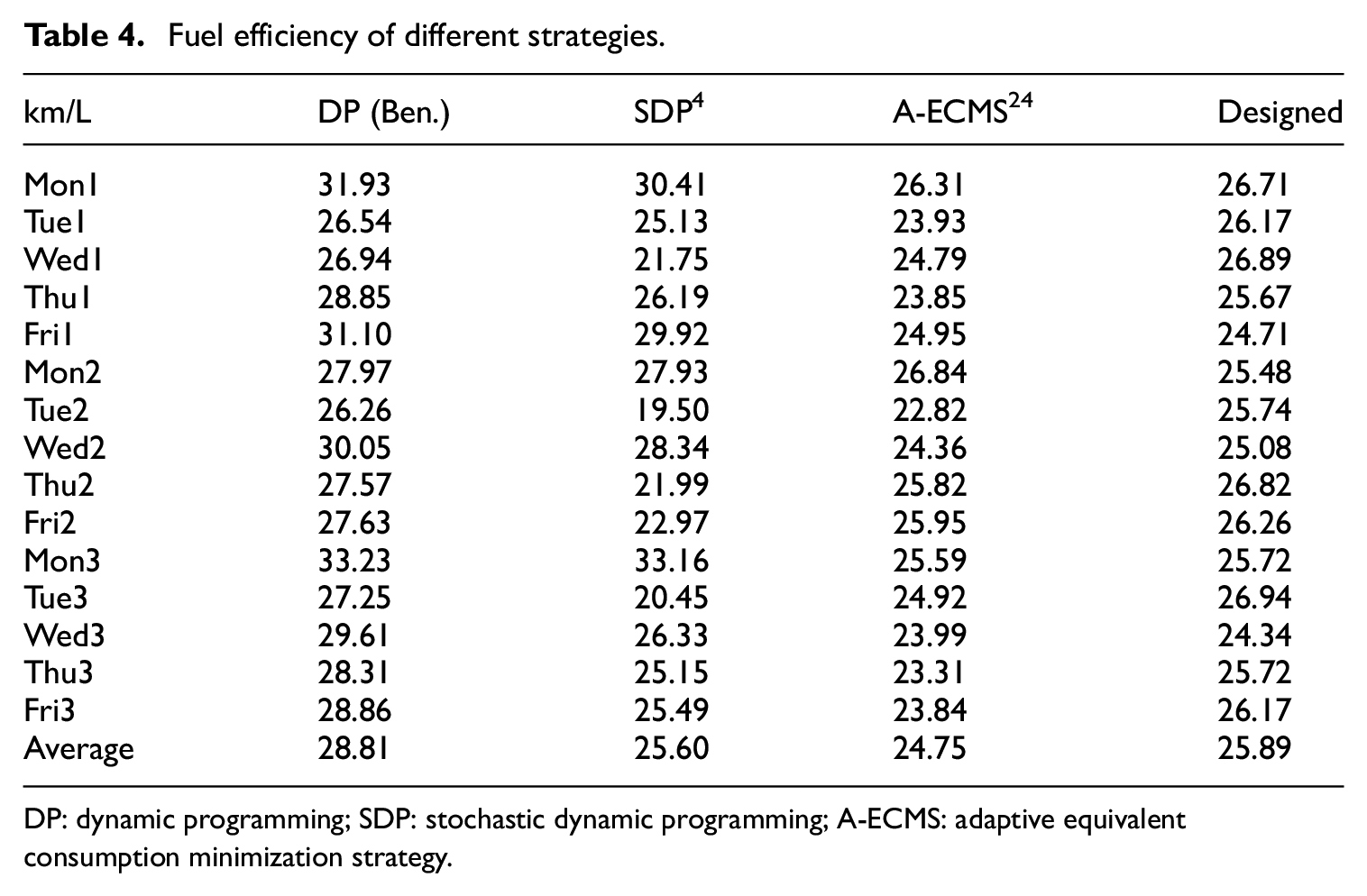
DP: dynamic programming; SDP: stochastic dynamic programming; A-ECMS: adaptive equivalent consumption minimization strategy.
Table 4 indicates that the control effect of the proposed strategy is much nearer to that of the DP than that of other two strategies, and the proposed strategy can improve the average fuel efficiency by 1.13% and 4.6% compared with the strategies in Jiao and colleagues4,24 respectively.
Conclusion
The performance of fuel economy of HEV is usually strongly dependent on the designed EMS. Therefore, an innovative EMS with the frame integrating variable threshold mode switching and A-ECMS is put forward for further reducing the fuel consumption of HEVs. Specifically, battery SOC and driver power demand are selected as the state variables to determine the switching modes. Mode switching signals, EF of ECMS, and the engine torque and speed at the engine-alone propelling mode are optimized offline using PSO based on the historical traffic data. The optimum solutions are formed as four mappings of the battery SOC and the power demand, which ensure the adaptivity and real-time capability of the online EMS embedded in the energy management system of the HEV in the face of actual driving cycles. The simulations on the GT-SUITE test platform verified the performance of the designed EMS in several actual driving cycles. Moreover, to show the advantages of the designed EMS, the comparisons of the fuel efficiency with the benchmark DP, the practical strategies (RB, CECMS, and RB-ECMS), and the existing strategies reported in the literature (SDP and A-ECMS) were given, which indicate that the control effect of the proposed strategy is much nearer to that of DP and can reach the respective improvement in the fuel efficiency by 25.9%, 13.25%, 1.32%, 4.6%, and 1.13%.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (Grant No. 24261573304) and the Natural Science Foundation of Hebei Province (Grant No. F2017203210).