
Abstract
Abstract
This study presents a modeling method for control system of multi-coupled non-linear cyber physical system with the help of second-order dynamics of communicating membrane system of neuronal population based on a population coding algorithm. Here, the communicating membrane system is modeled based on several IoT devices connected in peer to peer form and the theory of fractional differential equations is as governing function over them. Here, the difficulty is in developing a collaborative learning algorithm for finding collaborative key points within high-dimensional decision space. In order to overcome such a problem, a gradient-based method is required to enable distributed control and collaborative decision making. Here, at every interval of the sampling time, all the subsystems are optimally synchronized in P population system by multiset-rewriting rules including the effect of symport/antiport systems. This is an interesting technical problem, related to the borderline between universality and non-universality of continuity of distributed coupling of multi-coupled control system. The presented study discusses the experimental proof of the algorithmic framework and model for SLAM operation. The consensus architecture in this domain will enable the development of evolving architecture of a non-linear cyber physical system. The close loop stability and the recursive feasibility of the evolved architecture are also studied.
Introduction
In general, the global coordination in system of systems (SoS) is a daunting task. These responses are a four-stage cycle of stimulation response phases: mitigation, preparedness, response and recovery. The mitigation phase is related to activities leading to a reduction of occurring stimulation situations, and the second phase is the active preparation for any following unexpected events. Response is an acute phase after a stimulation, while recovery is a phase after the acute stimulation including all arrangements to remove arisen detriments and long-term supply of irreversible detriments. Multi-couple technologies have been used throughout all phases of the stimulation response cycle, although more in some phases than others. Especially, systems to support decision makers in the phases of mitigation, preparedness and recovery are in use, but the number of systems for technical support in the response phase is quite limited, which requires time critical response. The stimulation response system, one of the time critical applications (TCA), is related to decisions that have to be made by a human decision maker in stimulation situations.
The presented paper is a composite following modules and its associated framework integrating:
Fusion algorithm to merge the features of SoS’s consensus extracted through probabilistic incremental learning and merging it over the multi-coupled systems. Semantically arranged topological model to represent feature sets for distribution to other subsystems for multi-modal applications for end-to-end learning services. Adaptive control for system reliance on varying situations.
Thus, the enhancement of consensual decision making with localization of SoS’s through networked multi-coupled systems will enable the co-simulation technology to supports the decision making in getting several rescue strategies derived from the highest quality and quantity of spatial data. This will be highly applicable in autonomous drone-based GIS services to extend support to add value in decision support system in areas where it requires appropriate data management and efficient data discovery and integration to facilitate the decision makers whenever they need to make a decision in real-time. In order to increase the effectiveness of rescue and respond team towards emergencies in real-time.
Recent development in modeling of CPS (Cyber Physical System) has gained popularity. Among them, there are several portfolios which have led to the realization of both experimental and theoretical platforms.1,2 When complexity is a barrier in multi-couple decision making, researchers resort to features like emergence, temporal dynamics, rules of association between interaction. Cheng’s framework relies on segregation of decision making task based on simple or chaotic systems. Rule-based solutions are actively used for simple systems, and fuzzy-neural learning-based strategy is used for chaotic systems. 3 Probabilistic models for curve fitting strategies which are loosely based on Bayesian methods are also tried and deployed for chaotic systems. 4 However, as the data influx grows, these solutions are more likely to lose grounds and also there are so chances of curve over fitting for the given scenario. Although these systems failed to cater data dependent need of CPS, it have led to the inclusion of online learning-based systems. This learning and the model itself are based on online stream of data. Hence, it reduces the training time of batches and forms and overall hypothesis of the given task. 5 Therefore, this type of method is apt for paired coordination but failed to cater to the requirement of consensus development as the device number increases. There comes another deep learning-based multi-task recurrent neural network, which learns the device dependency and interconnectivity between nodes all in one go. Although it is deprived from the advantage of constant learning by online learning-based control systems, it added huge performance improvement for such system in the industry.6 –8 As the system size increases and more data sources are included in the CPS framework, the demand to scale time effectively for its sub-modules is a major concern, and thus till now researchers are looking for the new ways to include the advantages of online learning, deep learning and effective time scalable system. Few approximate solutions are achieved, but yet there is a need for a means to integrate couple system with TCA effectively.
Cyber physical system needs a means for computational coordination between physical infrastructure and its cyber counterparts, which needs to be consistently coordinated in accordance with one another to ensure the safety and reliability of the system. But due to heavy reliance on its data dependent functionality, the influx of huge data size needs thus that the requirement of multi-coupled modeling is the first basic requirement and of paramount importance over large-scale system. This issue can be solved by resorting to distributed simulations, managed time scales to debard slower simulations to be overloaded with data influx for faster application and thereby increases the performance of multi-couple cyber physical system. Thus, in this study, we aim to solve the problem with the presented co-simulation-based consensus development for similar applications.
Methodology: Architecture of consensus model based on population coding for multi-Holon infrastructure
In this section, we present a mathematical framework to achieve encoding mechanism of sound for communicating between several robotic platforms as follows.
In this section, we address the distributed logic for developing consensus among Holons (a self-sufficient building block of a bigger architecture which has deep architecture on its own but when put in connection with other Holons, it form a way complex and evolutionary architecture on its own) of CPS and predicting the mission planning with time-varying random fields. In a sparsely connected Holons, the integration of computing agents and sensors should be collaborated such that the auto-pilot program of each Holons shall overcome the uncontrolled scenario with convergence properties. Here, we will show how such properties asymptotically converges with distributed logic during such multiple Holons system. To avail delivery services in remote areas through the computationally generated consensus between each of Holons units, where the degree of the instability of Holons field dynamics is estimated on run time basis as a function of local observation models from each Holons unit which is later employed to communicate with one another in order to form a fused model for information gain. This yields distributed estimates for each Holons unit with minimized mean squared error. Here, we present the numerical consensus model with faster convergence and optimal gains. In this scenario, we deal with the two distinct layers: (a) the physical layer of the time-varying random field and (b) the cyber layer computing to create a global model and simultaneously communicating with one another.
Here, a centralized approach in developing sensor fusion model poses several challenges, as it requires all sensor units to communicate their observed values to the local fusion unit. This in turn is the most fragile central node owing to its vulnerability to fault or noise and resulting in taxing the computational process when excessive communication bandwidth requires at the same time for dispatch of the fusion sequence to and fro from the central fusion node. Therefore, such central fusion node is inelastic when large-scale time-varying random fields are involved; such a case is with multiple Holons-based manufacturing, warehousing and package delivery services. Here, we propose a trait sequence-based sensor fusion model for the same in time-varying system with sparsely connected communication network with the methodology represented in Rai. 9 This study will drastically fend off the processing load on onboard electrical device, though the algorithmic computational process is computed over the embedded system, thereby reducing the reliance over electronic sensors to gather processed data or noise reduction, since it is a learning-based method. Therefore, its reliance over computation workload over electronic components is drastically reduced. However, the inclusion of artificial intelligence has drastically improved the decision-making process. This is quite vital for educational aspect. As such a study would enable incremental research in this field dominated by mostly hardware centric research. This process is smoothed out with easy to describe process for postgraduate and undergraduate researchers to replicate and modify the Holons-based process for further improvement. Educating about this innovate aspect of using one consensus modeling-based method is crucial for swarm-based robotic operations and cutting off the extra expenses on energy spent for training and estimation validation for longer hours. This consensus model for multiple Holons-based services is based on three components, i.e. dynamic system, local observation from each Holonic unit and local communication.
Physical layer: Dynamic system
Let the multi-object state at time t is represented as population coding sets



Cyber layer: Local observation
The physical layer takes care of field dynamics where observable sensor values are communicated. Thus, the communication layer availed by cyber layer for N number of computing agents derived from symport population coding sets in the system of multiple Holonic units. Such observations can be represented in a linear model as

Now the generalized equation with
Cyber layer: Concurrent communication
Now, in order to exchange the observation with computing agents in autopilots of multiple Holons, we realize such communication costs, only in accordance with their nearest agents. Here, the observation sites
Let

Thus, for every p
update (){


}
where

Now, to overcome the problem of unknown correlation between no two distributions of independent variables, the solution to the fusion problem is

Hence, the generalized posterior for the scalable fused Holons service (Figure 2) can be represented in the form of geometric mean

Cyber layer: Fusion model
The initial state distribution of the primary trait vector (i.e. when K = 1) is given by

The observation variables

Taking into account all the possible values of


Thus, we can describe a hidden Markov chain by initializing the computing with mapping function
Algorithm: Trait based consensus coupling algorithm (TBCCA)
update ()
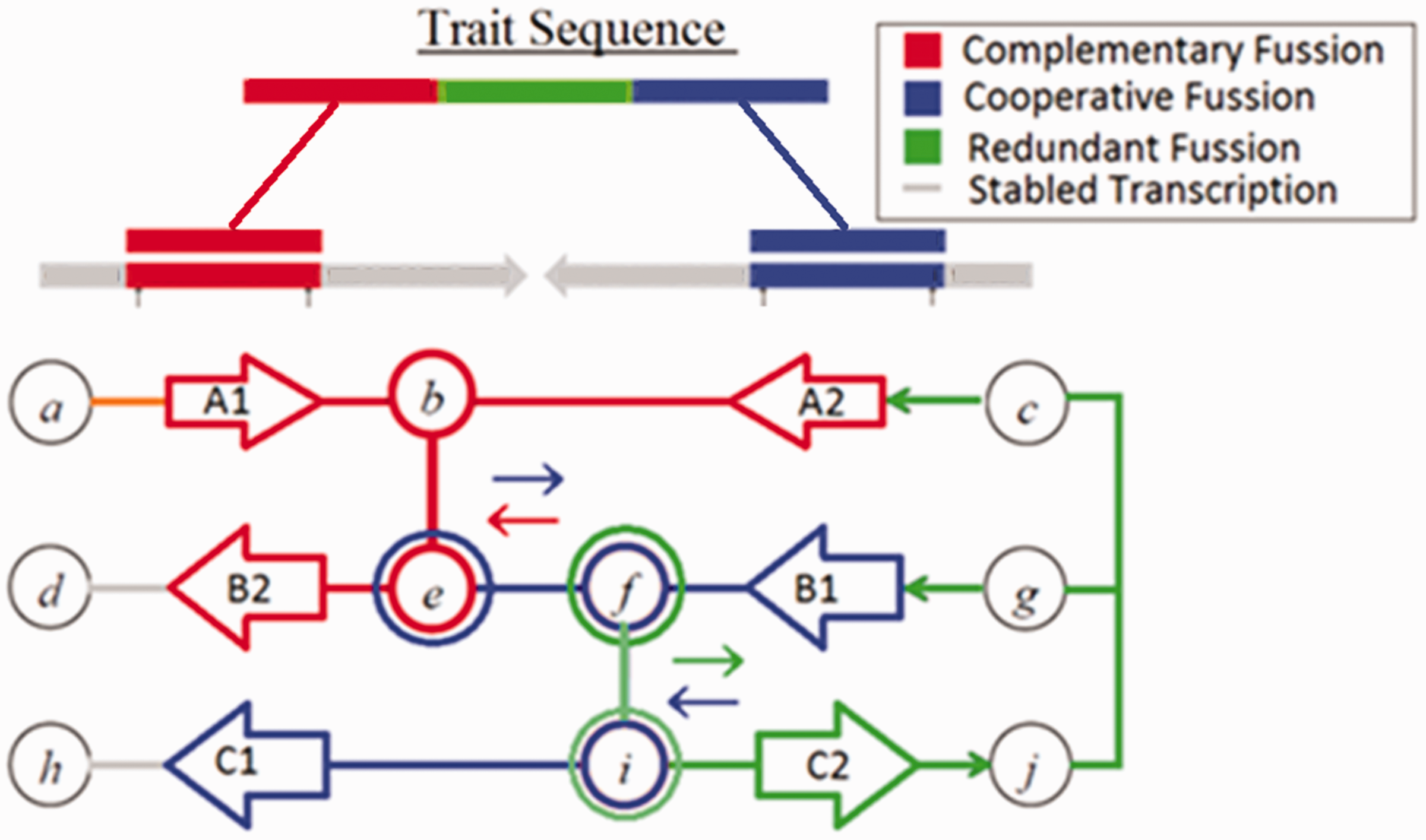
Illustration of model injection types achieved from TBCCA from sparse trait transcription of multiple Holons, where a, d, h represent the final state, whereas b, e, f, i, c, g, j are the meta-states.
10 Return (
Results and discussion
Here, the collaborative decision making and distributed planning of the paths were asses, as shown in Figure 3(b). Our methodology depends on distributed machine learning, sharing for networks and backings a wide range of operations in the middle of independence and collaboration with least supconsensus on system availability. With the possibility of thousands of drones at flight at any point in time in an urban environment for designing of a network control logic, it is an open research question how to achieve a fair and efficient allocation of the airspace while not overloading any of the elements. Proposed system is to coordinate access to the airspace. The goal in the system is to ensure efficient and fair use of bandwidth. There is no central mechanism that in the short run allocates bandwidth to each of the hosts, i.e. the end nodes which are the users of the network. Rather, hosts allocate a fair and efficient amount of bandwidth to themselves in a participatory fashion. In this method, by probing the network logic in distributed small trait sequences and refraining to add more loads to it if they realize the network is in a congested state. The summarized trait sequence leads to the programming of process network when such trait sequences are made to fused with one another as per the proximity of communication between drones, as shown in Figure 2. This is done by analyzing the amount of time it takes for the delivery acknowledgment (ACK) to be received by the sender (if ever in case of a dropped packet). To probe the network in a decentralized way, the network is driven toward congestion which creates delayed rerouted trait sequences packets which results in intelligent spread of the condition in distributed form for delivering ACKs. From this, the sender realizes it must reroute in sending more packet in sparse manner until the shortest network becomes less congested. This is an implicit way of inferring congestion. This is a helpful feature, because running a network in a congested mode is not efficient; something that we have to do when the network does not provide feedback, just to be able to implicitly infer congestion. Our methodology depends on backings a distributed range of operations and establishing collaboration with least suppositions on system availability. In particular, we added to a distributed derivation framework in view of digital predicates that can catch the association with the physical world. In the fundamental distributed computing model, realities and objectives are spoken to as learning that can be shared craftily and aide the distributed decision-making procedure. The duality of objectives stretches out to the confirmation framework, which treats forward and in reverse multicasting on an equivalent balance. Vital properties of our intelligent structure, for example, robustness, fulfillment and end conditions, have been set up under exceptionally broad conditions (Figure 3 and Figure 4).
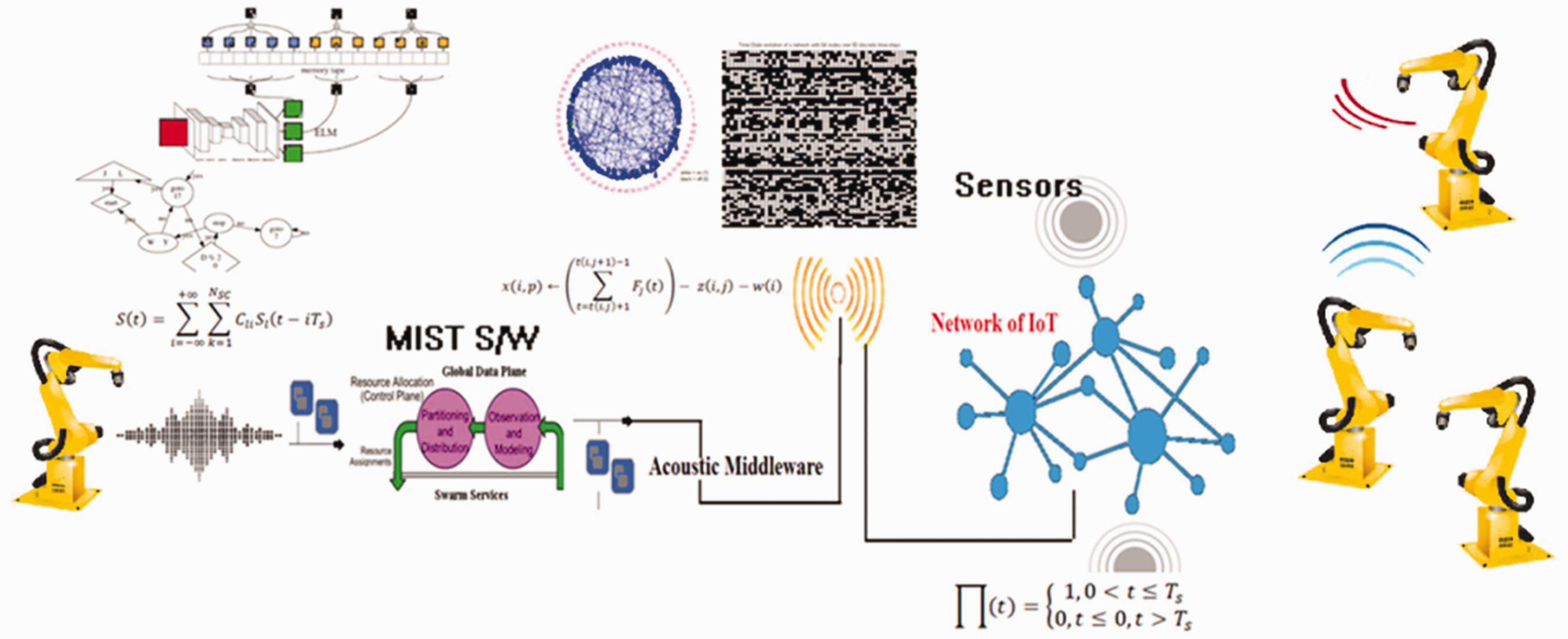
Overview of the presented research project where ultrasonic waves is used to establish M2M-based multicast communication b/w multiple device in SLAM operations. Here, the IoT-based sensor nodes are attached to the SLAM units. The sensed information is encoded and communicated with the help of presented method.
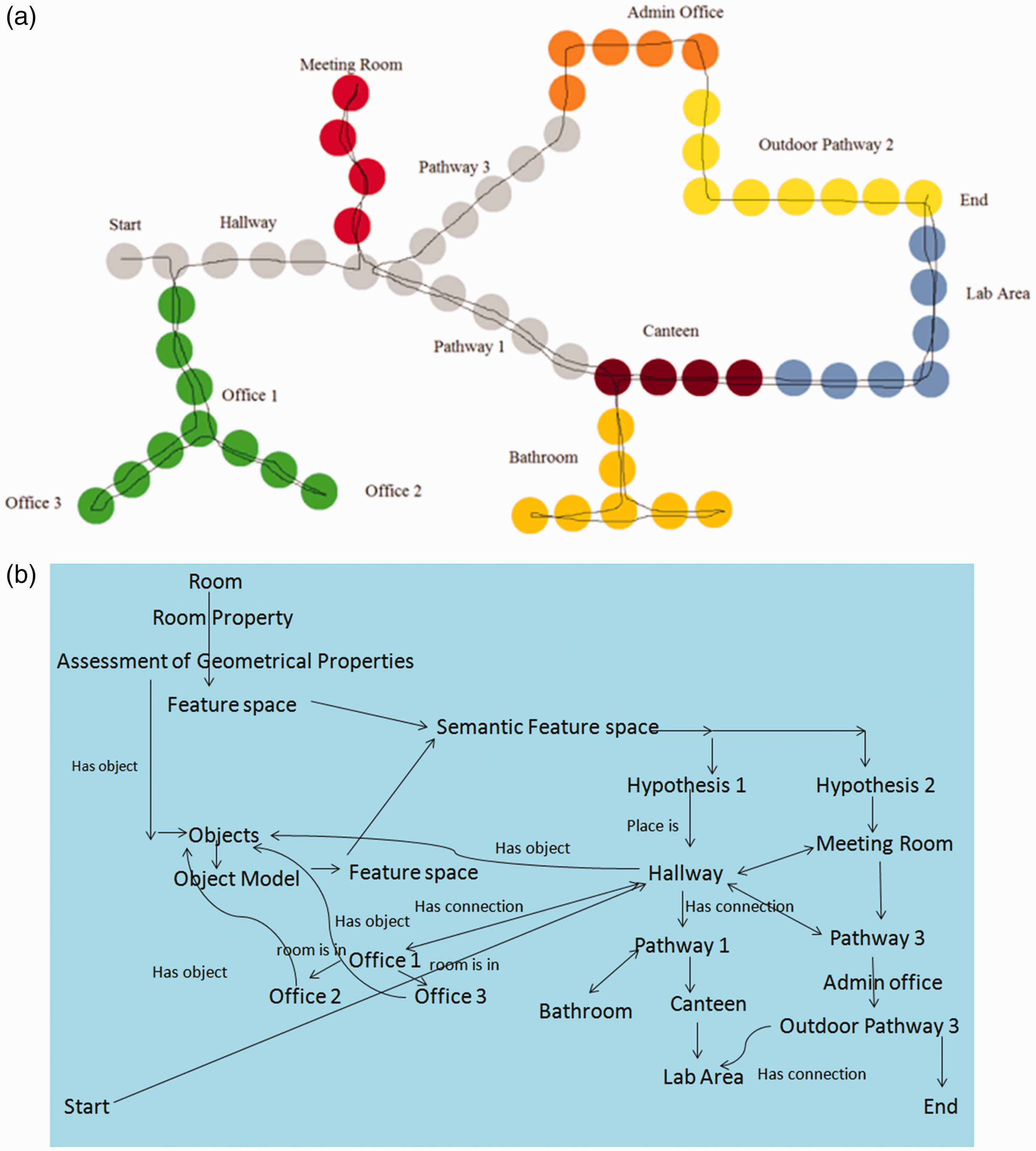
(a) Topological environmental maps formed by multiple mobile robotic platforms. (b) Chain model of the semantic hypothesis formation by multiple agents running on various mobile robotic platform.
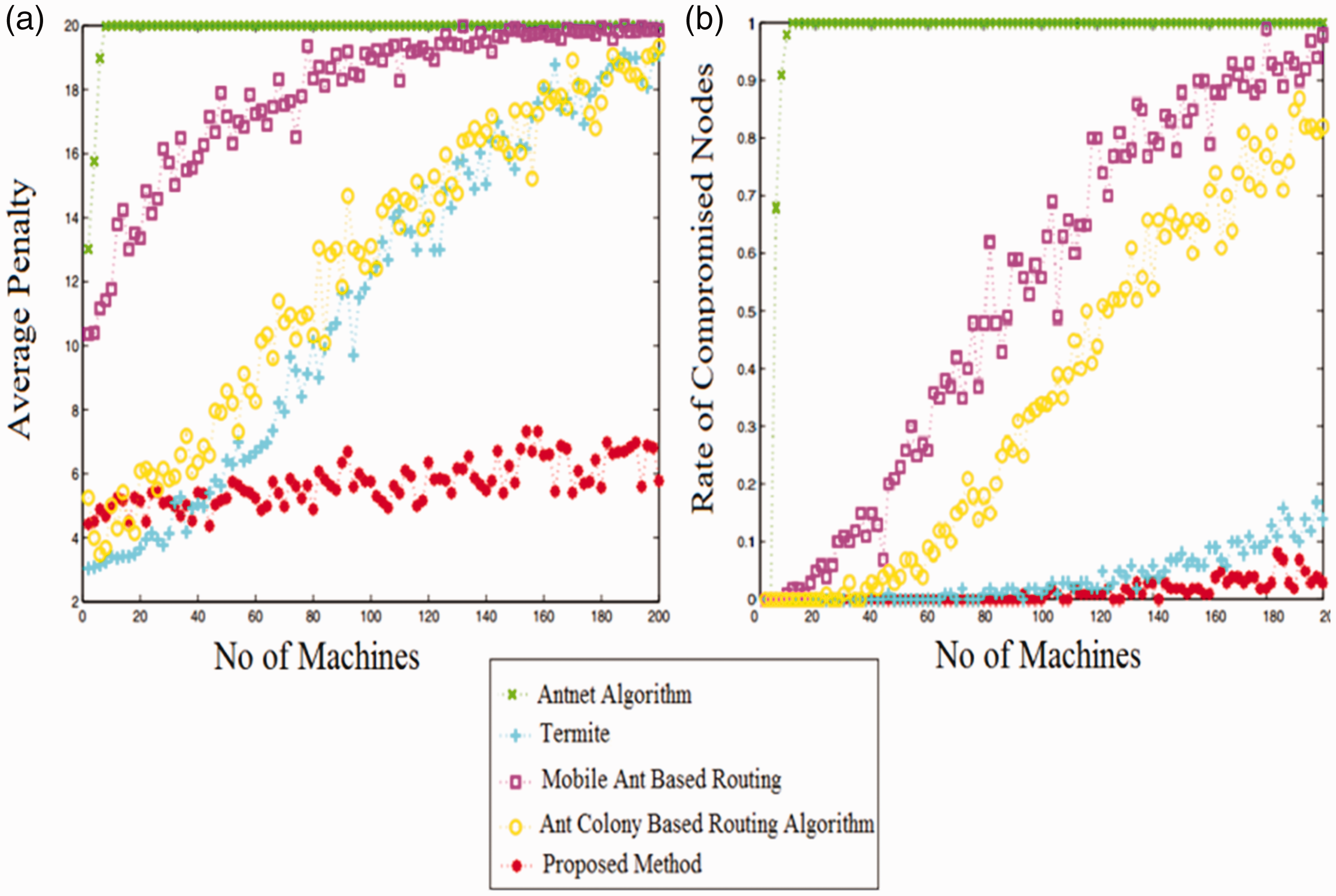
Performance results and comparison. (a) Performance analysis of distributed learning where average penalty is taken as metric to determine the encounter of failure. (b) Scalability analysis for the presented system.
A key component of our distributed multi-objective policy learning structure is its dynamic and intelligent nature, implying that certainties speak to perceptions, and objectives can prompt changes in the environment that will show themselves as new actualities streaming into the framework. Whether a unique neighborhood objective can be fathomed is frequently optional, in light of the fact that the consolidated impact of an arrangement of nearby objectives on the digital physical framework and its nondeterministic progress can prompt arrangements of larger amount objectives even without requiring arrangements of every lower level. To adapt to framework annoyances and unforeseen disappointments, it is fundamental that neighborhood objectives are not dispensed with when they are fulfilled, in light of the fact that their primary reason, to be specific controlling the framework toward the fulfillment of an abnormal state property, might not have been accomplished yet. Strictly when certain abnormal state objectives are achieved, assistant objectives can be wiped out so they don’t need to rival new objectives that control the framework toward the following abnormal state objective. Certifiable frameworks are more multi-coupling systems, in light of the fact that such procedures occur simultaneously at numerous levels of deliberation and at various time scales.
Conclusion
In this study, scalable technique based on neuronal population coding for online multi-coupled distributed learning is presented in order to facilitate the coordinated process of decision making in scalable systems i.e. drone-based services or smart factories. The presented experiential results showed that more than 200 subsystem couplings can be catered with higher efficiency. The method can be extended for more complex and dynamic domains in the cyber physical system.
Footnotes
Declaration of Conflicting Interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.