
Abstract
This study solves the trajectory-tracking control problem for a crosswind-perturbed crewless PVTOL aircraft. The proposed globally feedback-based solution consists of two parts: one makes the aircraft’s horizontal and vertical position accelerations convenient, ensuring no singularities in the closed-loop system. To accomplish the control task, two controllers were designed: a continuous controller to ensure the aircraft tracks the trajectory, and a discontinuous integral-adaptive sliding-mode controller to counteract the destabilizing crosswind effect. The first controller was designed using a simple backstepping approach, with a saturation function replacing linear control to avoid singular points. The second controller was designed using Lyapunov functions and Barbalat’s lemma. The solution’s performance was tested through numerical simulations, yielding convincing results.
Keywords
Introduction
Even when crewless aircraft have very complex nonlinear dynamics, we need to control them to make them carry out at least some easy maneuvers, for instance, reaching a point and staying stable. However, designing such a controller is a challenging task. Fortunately, a few decades ago, Hauser et al. 1 introduced the simplified Planar Vertical Take Off and Landing (PVTOL) aircraft to model, as its name implies, the take off and landing of an airplane restricted to move in a vertical plane. This simplified model embodies several characteristics and behaviors found in quadrotors, helicopters, or the Harrier Jump Jet,2–4 alleviating the complexities found in actual aircraft to some extent. Also, the PVTOL is an underactuated system; it has two controllers and three degrees of freedom. All these features make it an ad-hoc benchmark for testing control techniques.
In general, regulation and trajectory tracking are the main problems that have been addressed by the control community when designing control laws for the PVTOL aircraft, with Hauser et al. 1 and Martin et al. 5 being the pioneering works. Related to the trajectory tracking problem, using the feedback linearization approach, a controller to stabilize a non-minimum phase approximation of the PVTOL system is designed in Hauser et al. 1 In Martin et al., 5 the authors propose a nonlinear control to accomplish the trajectory tracking problem for a version of the PVTOL. To this end, the authors took advantage of the aircraft’s flatness property, ensuring bounded zero dynamics. The latter is thanks to applying the inverse trajectory feedforward and a state tracker. In this line, in Fliess et al., 6 the authors combined the PVTOL flatness property and trajectory planning using a Bézier spline to accomplish smooth translational maneuvers. Once again, exploiting the PVTOL flatness property, the authors of Sira-Ramfrez 7 designed an iterative off-line algorithm to approximately estimate the flat output reference trajectories in terms of the desired non-minimum phase output trajectories. Recently, in Bonilla et al., 8 based on implicit systems techniques, the authors introduced a novel exact linearization procedure applied to control a PVTOL aircraft. The idea behind this technique is to split the nonlinear state representation into a basic rectangular representation, that is, the system is linearized, and an auxiliary nonlinear algebraic equation. This representation can be applied to more sophisticated nonlinear dynamic models. Using an input-output feedback linearization technique, a linear controller is proposed in Bonilla et al., 9 provided state availability. Then, a tracking control law was obtained using pole placement and regular perturbation techniques, which was numerically evaluated using a PVTOL model. We mentioned that above, briefly reviewed studies only ensure local stability, and the corresponding control laws are considerably more complex than the ones proposed to solve regulation. A class of sliding-mode-based controllers, known as integral and terminal formulations, for the twin-rotor platform is introduced in Irfan et al. 10 This approach systematically designs robust control mechanisms to reduce chattering and address the nonlinearities and strong dynamic coupling characteristic of unmanned aerial vehicle systems. In Saleem et al., 11 the authors proposed a novel robust position tracking controller for Vertical Take Off and Landing Unmanned Aerial Vehicles based on a Linear Quadratic Integral (LQI) framework enhanced with a nonlinear rate-varying integral (RVI) compensator. Their approach replaces the conventional integral term in the LQI law with an adaptive mechanism that dynamically scales according to both the tracking-error velocity and the braking acceleration of the reference trajectory. The controller was validated experimentally on a hardware-in-the-loop aero-pendulum testbed equipped with coaxial contra-rotating propellers.
On the regulation side, a backstepping-based approach is developed in Sepulchre et al. 12 to control the translational dynamics using the cascaded roll subsystem. In Fantoni and Lozano, 13 the authors developed an algorithm based on a forward control approach to ensure asymptotic stability using a Lyapunov function. The ideas from this study were used14–18 to develop solutions for real-world PVTOL applications. For instance, in Zavala-Río et al., 17 nonlinear combinations of saturation functions were used to limit thrust input to arbitrary saturation limits, thereby developing a global stabilizer controller for a PVTOL aircraft. The Lyapunov theory and saturation functions are used in Sanchez et al. 19 to propose a global stabilizer control for PVTOL aircraft, which was tested using real-time experiments. A stabilizing control strategy based on Robust Control Lyapunov Functions and Sontag’s universal stabilizing feedback for a crosswind perturbed PVTOL is introduced in Munoz et al. 20 In Castillo et al., 21 the authors designed an algorithm that uses the robust control Lyapunov function approach and unknown disturbances rejection for stabilizing a wind-perturbed vertical take-off and landing aircraft. Using two simplified unmanned PVTOL aircraft, the authors of Escobar et al. 22 solved the slung-load transportation problem. To this end, a decentralized passivity-based control scheme was implemented, where the PVTOL’s physical connection to the load served as a means of communication. Based on a feedback linearized PVTOL model that does not cover the entire state space due to a singularity, the authors of Escobar et al. 23 developed novel controllers that can be adapted to other vehicles. This study uses a feedback linearization-based control that avoids reaching any singularity; the necessary conditions for ensuring asymptotic stability are given. Considering a PVTOL system with a constant force applied to the horizontal axis, a simplified stabilizing control approach was developed in Lozano et al. 24 Under some suitable conditions, this approach ensures exponential stability. In Villaseñor Rios et al., 25 a different extended linear state observer and active disturbance rejection control-based approach is developed to control a nonlinear underactuated PVTOL aircraft system with an inverted pendular load. Using the ideas found in Teel’s paper, 26 the authors of Lozano et al. 27 introduce a modified nested saturation control to stabilize the model of the PVTOL system.
In our humble opinion, the above briefly reviewed PVTOL aircraft control-related studies are the closest to the solution we present in this manuscript; we suggest the interested reader consult the work, 28 where a well-developed and structured evaluation of popular control algorithms for the PVTOL can be found.
In this work, we propose a globally feedback-based solution for trajectory tracking control of a crewless PVTOL aircraft subject to undesired crosswind effects. To this end, we applied a backstepping version with a saturation function. The idea is to force the horizontal and vertical aircraft dynamics to predefined suitable acceleration references in their respective directions. These accelerations allow the PVTOL to avoid the singular angular position. Afterward, we derive two control laws: a continuous one for trajectory tracking and an integral adaptive sliding mode controller to counteract the unknown bounded crosswind effect. To design the continuous controller, we do not use the feedback linearization method or the differential flatness approach; instead, we propose using an implicit Immersion and Invariance method-based controller. To assess the effectiveness of our control approach, we designed and implemented three numerical simulations, one of which compares against two well-established related control solutions. In every case, we obtained satisfactory results. Even when the regulation problem has been exhaustively studied, the singularities have been neglected, opposite to what we do in this work, in which we give them the corresponding protagonism, because in actual applications, they cannot be ignored.
We organized the rest of our study as follows. We introduced the PVTOL dynamical model, the problem statement, and the control strategy in Section 2. We designed and implemented the numerical simulations needed to assess the effectiveness of our control approach in Section 3. Finally, we presented the concluding remarks in Section 4.
The symbol

The symbol

Dynamical model
The PVTOL aircraft is an underactuated system with two control inputs and three degrees of freedom. This aircraft operates within a two-dimensional plane and is equipped with two independent motors that generate both force and torque on the vehicle (see Figure 1). The dynamics of the PVTOL aircraft are described by the following model20,29:
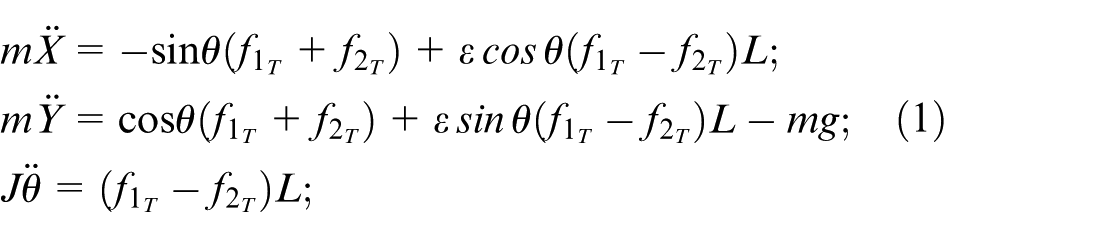
where

The PVTOL aircraft.
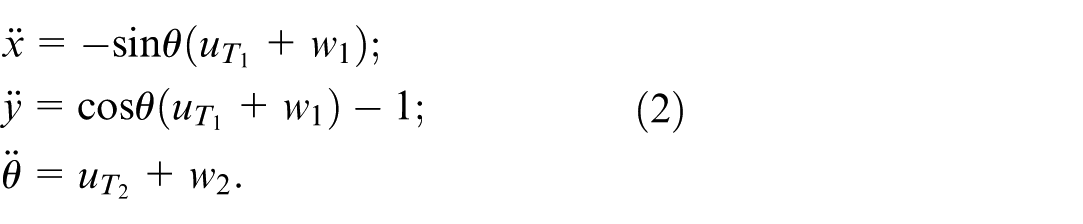
To facilitate the subsequent developments, we normalized the system described in equation (1) by using the following variable transformations:
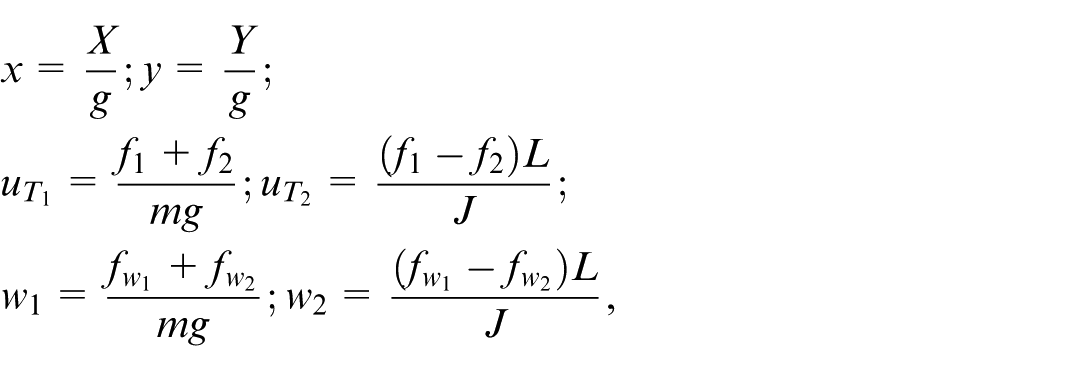
and considering
Now, we introduce the control goal of this study.
A1: The whole system state is measurable.
A2: The crosswind forces are bounded as
Then, the control objective consists of designing a controller such that the tracking errors:

fulfill:

while
Limitations
The proposed solution requires system position and velocity measurements, as established by assumption A1, and parameters
In a context where the system velocity is not available, we can overcome this inconvenience using, for instance, a super-twisting observer like the one proposed in Davila et al. 30 and Cardenas and Aguilar, 31 the generalized proportional integral (GPI) observer introduced in Sira-Ramírez, 32 or algebraic observation methods like the ones introduced in Cortés-Romero et al. 33 and Sira-Ramírez et al. 34 All these alternatives have finite time convergence, and the latter relaxes assumption A1.
We finish this section by expressing the control model (2) in its compact form as:

where

where

where the nominal controller
Challenges posed by the PVTOL system
We must point out that in the case of

with
If we desire to solve the trajectory tracking problem when

where
itemize

which transforms the system (2) in

where
Control strategy
In the first stage, our control strategy proposes a nominal control law
According to this definition, the following properties are fulfilled:
Properties
Nominal control design
Following the ideas found in Fantoni and Lozano
13
and Cardenas and Aguilar,
31
we solve the trajectory tracking problem by using a simple backstepping approach. However, we use saturation functions instead of simple linear control to avoid the singular points
First of all, we must note that, from relation (2), we can obtain the following expression:

and

The idea behind our control proposal consists of designing the nominal control

where the positive constants

holds. In other words, we desire that accelerations in

If the expressions above hold, then the tracking errors (3) also fulfill:

We underscore that the equation (13) ensures globally asymptotic and locally exponential convergence to zero (see Supplemental Appendix A), provided that conditions of relations (11) and (12) are satisfied. The relations (8) and (9) suggest us to select

and:

where, according to relation (11),
To control the angle

goes to zero. If

Obtaining the second time derivative of (16) and using the third equation of (2), we have that:

Therefore, to ensure that

where

The algebraic expression of the set of variables:

can be found in Supplemental Appendix B.
We must note that our control law (15)–(19) avoids singular points. It suggests that our control law ensures global stability in the trajectory tracking for any initial condition, as long as condition (11) holds. Additionally, implementing the controller (19) and the algebraic variables in (20) can be a tedious and error-prone task. To alleviate this issue, we can use the following tracking differentiator39–41:
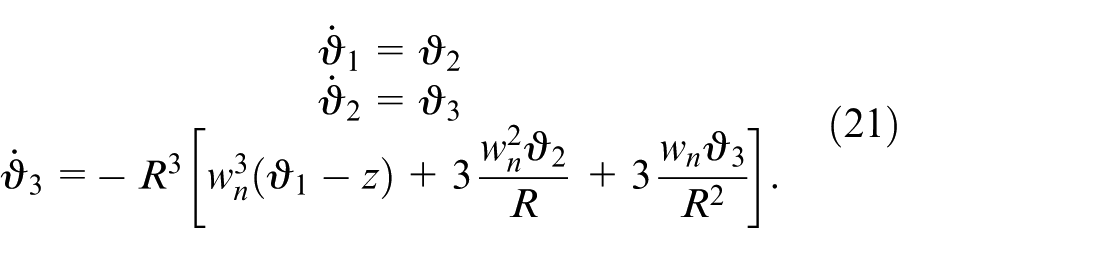
For

In other words, we do not need to compute the algebraic expression (20). Particularly, we used the above-introduced tracking derivator (21) to estimate the signals in (20), with the filter values
Active compensation of matching perturbation
Inspired by Castanos and Fridman
36
and Rubagotti et al.,
43
we address the crosswind disturbance rejection assuming

where

Substituting the value of:

given in (4), considering that

Following the ideas introduced in Roy et al., 44 we propose the adaptive controller:

where

with

Now, to perform the convergence analysis, we use the following Lyapunov candidate function:

Recall that

Using

Please note that

From the above, we conclude that
It is worth mentioning that if

with

where
We summarize the above discussion in the following proposition, which is the main contribution of this study.

are Hurwitz, together with the adaptive integral controller
In general, the control constants are selected such that their corresponding characteristic polynomials have the following structure:

where
It is worth mentioning that, maybe, the fundamental integral sliding mode control advantages lie in its ability to achieve almost-complete disturbance rejection from the beginning, in contrast to conventional sliding mode schemes where robustness is only ensured after the reaching phase is achieved (the interested reader can find a detailed treatment of this topic in Javaid et al. 46 ).
Numerical simulations
In this section, we design three numerical experiments: two are control tasks consisting of tracking an ellipse-shaped trajectory, and the third is a point-to-point translation tracking a Bezier polynomial. This last experiment allows comparing the proposed control approach with two well-established solutions found in Castillo et al. 21 and Cardenas and Aguilar, 31 which are based on slide mode and Sontag’s formula, respectively. To accomplish these experiments, we used the following setup. The control gains are set as:

For simplicity and without loss of generality, we conducted all experiments using normalized coordinates. Then, we chose the following normalized functions to simulate the crosswind:

and we used as the saturation function

We set the PVTOL initial conditions as:

with

Proposed control strategy performance when tracking an ellipse-shaped trajectory, with the initial condition set at

Controllers
In other words, our control approach ensures the whole-state stability, and the crosswind effect on the output variables

where a finite time of time derivatives of this interpolating polynomial was set to be equal to zero at the initial and final maneuvers times,
that suitably interpolate between the initial and final values of displacement. In the mentioned figures, we can see that the aircraft effectively translates from the position

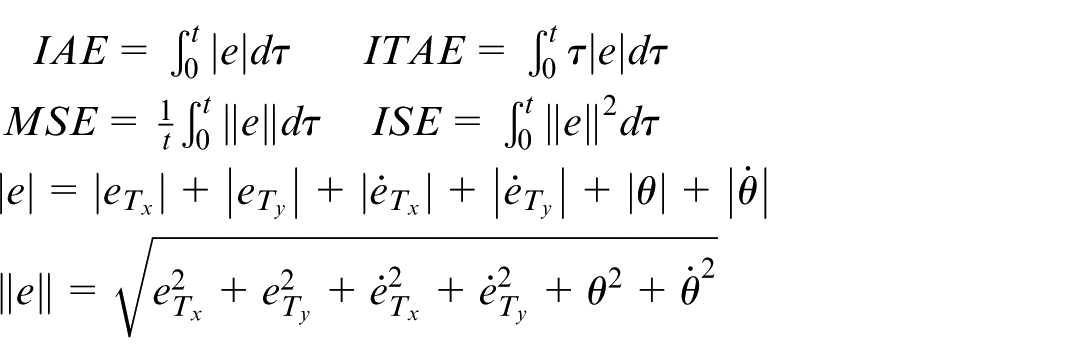
The corresponding IAE, ITEA, MSE, and ISE performance indexes for the ellipse-shaped trajectory.

Proposed control strategy performance when tracking a Bézier’s spline-shaped trajectory, with the initial condition set at

Controllers
Finally, in Figure 7, once again we show the IAE, ITAE, MSE, and ISE indices for the point-to-point translation task. This time, we can see that the four indices converge, mainly because the angular position and velocity converge to zero. Besides, the variable

and we set the origin as the initial condition, but we set the angular position to

The corresponding IAE, ITEA, MSE, and ISE performance indexes for PVTOL point-to-point translation tracking a Bezier’s polynomial task.
In Figure 8, we show the simulation outcomes, where we can see O, M, and C converge to coordinate

Comparison of the closed-loop response of O, M, and C when performing a piece-wise reference trajectory.
We note that this comparison provides only a rough idea of how effective our control solution is compared to the other two approaches. Due to the nature of our proposal, the comparison is unfair because we included an integral action that completely counteracts the external perturbation from the beginning of the experiment. On the other hand, the previously introduced solutions in the literature neglect the crosswind effect when the aircraft’s position is located at the singular position
Finally, in Table 1, we present the corresponding statistical performance indices to quantify how our proposal compares with the other two methods; we observe that ours performs better.
Performance index for

Conclusions
We designed a global, feedback-based control solution for trajectory tracking of a crosswind-perturbed crewless PVTOL aircraft. This solution applies a backstepping version in conjunction with a saturation function. The controller works as follows: to prevent the PVTOL from reaching a singular angular position, the accelerations in the horizontal and vertical aircraft positions are set to convenient values. The latter enables us to obtain a continuous controller for trajectory tracking and an integral adaptive sliding-mode controller for canceling the unknown bounded crosswind effect. We designed a continuous controller using an implicit version of the Immersion and Invariance method, without using feedback linearization or differential flatness. We numerically tested the performance of our control solution across three simulations, comparing it with two other well-established related control solutions. The numerical simulation outcomes allowed us to claim that, in general, our proposal performance can equate with those of previously introduced approaches, even when, in our case, the time derivatives of signals (20) were computed using a tracking differentiator to avoid solving a large number of algebraic expressions.
Stability proof
Let us write the equation of (13) in space form as

where for simplicity, we fix

whose time derivative around the trajectories of (33) leads to:

Evidently, using

According to (34), we have that
Expression of the variables,
,
,
,
and
For the following developments, we use the following notation: according to the definition (11), we introduce the following variables

where

and:

where:

where

Footnotes
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: C. Aguilar-Ibanez, and M. S. Suarez-Castanon want to thank the Instituto Politecnico Nacional for the support received under research grants 20253465, 20250123, and 20251352; B. Saldivar wants to thank to the Secretaria de Ciencia, Humanidades, Tecnologia e Innovacion for the support received under the research grant CF-2023-I-722.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.