
Abstract
The decoupled multimodel framework offers an effective alternative for modeling, control, and diagnosis of nonlinear systems. Its structure relies on interacting with sub-models, with the degree of interaction varying across systems, which directly influences the control design. This paper proposes a novel fault-tolerant control strategy that combines second-order sliding mode control with a multimodel fusion approach to compensate sensor faults. A second-order sliding mode multiobserver is developed to simultaneously estimate the system states and sensor faults. The proposed methodology is validated through a practical implementation on a chemical transesterification reactor, demonstrating its effectiveness and robustness.
Keywords
Introduction
Ensuring safety and reliability in modern engineering systems requires effective strategies to handle unexpected faults. Among these, sensor and actuator failures pose significant threats, as they can drastically alter system dynamics, potentially leading to instability, performance degradation, or even catastrophic outcomes.1–3 To address these challenges, fault diagnosis (FD) and fault-tolerant control (FTC) have been extensively studied, aiming to maintain system stability and performance despite the occurrence of faults. FTC strategies are generally classified into two categories. Passive FTC relies on robust controllers designed to tolerate a predefined class of faults, which are treated as model uncertainties or bounded disturbances. Notable examples include H∞ approaches, which ensure stability but may limit performance under nominal conditions.4–6 Active FTC, on the other hand, adapts the control law in real time based on fault information from fault detection and isolation (FDI) modules. This allows more accurate fault compensation, but with increased algorithmic and computational complexity.7–9
Since faults can be represented as additional nonlinear uncertainty components in system dynamics, 10 intelligent learning-based approaches have been widely investigated due to their strong approximation capabilities.11,12 However, the large number of adaptive parameters involved in such methods often results in increased computational complexity and implementation difficulties. As an alternative, sliding mode control (SMC), owing to its inherent robustness to uncertainties and external disturbances, has been extensively employed to compensate for nonlinear uncertainty effects in dynamic systems,13,14 and has proven effective in the development of fault-tolerant control (FTC) strategies.15–17 Nevertheless, conventional SMC-based FTC schemes suffer from several limitations, including chattering phenomena, lack of finite-time convergence with linear sliding surfaces, and performance degradation when system states evolve far from the sliding manifold. To overcome these drawbacks, advanced SMC techniques such as terminal,18,19 integral 20 and second-order sliding mode control have been introduced to enhance convergence speed, steady-state accuracy, and robustness, while significantly reducing chattering. Despite these advances, most existing FTC designs remain largely restricted to linear system models and rely on accurate real time state and fault estimation, which continues to be a challenging task in practical applications.
Moreover, industrial processes are inherently nonlinear, which renders conventional linear observers insufficient for accurate state and fault estimation. To overcome this limitation, multimodel strategies have been extensively investigated. Within a multimodel framework, a nonlinear system is represented by a collection of simpler sub-models, each describing the system dynamics in a specific operating region. Such a representation facilitates the design of advanced observers and controllers while ensuring an accurate approximation of the overall system behavior.21,22
Building on this concept, several studies have addressed fault-tolerant control within multimodel settings. For instance, using a decoupled multimodel state representation, 23 proposed an active FTC strategy for sensor fault scenarios. Although effective, the robustness of this approach degrades in the presence of significant model uncertainties. To enhance robustness, sliding mode techniques have been incorporated into multimodel frameworks. In particular, Second-Order Sliding Mode Multi-Observers (2SMMOs) have been proposed. 24 By exploiting higher-order derivatives of the sliding variable, 2SMMOs enable robust and simultaneous estimation of system states and sensor faults while significantly reducing chattering, making them well suited for real-time fault-tolerant control architectures.
The fundamental principle of multiple model control consists in partitioning the entire operating range of a process into a set of distinct operating regions, each associated with a simple local controller. The coordinated synthesis of these local controllers results in an effective global control law.25,26 A widely adopted strategy, referred to as the switching approach, is particularly suitable when the sub-models represent distinct and non-overlapping system dynamics. In this case, a selection mechanism based on a predefined performance index activates a single local controller within the feedback loop for each operating region. 27 However, when operating regions are imprecisely defined or overlap, the switching strategy exhibits notable drawbacks. Abrupt transitions between local controllers may introduce discontinuities in the control signal, which can degrade closed-loop stability and performance, especially in transitional zones where multiple sub-models are simultaneously valid.
This paper presents a novel fault-tolerant control framework for nonlinear systems based on a second-order sliding mode multi-controller approach. The main contributions of this work can be summarized as follows:
(1) Continuous multiple-model control strategy: A multi-controller architecture based on the multiple-model framework is developed using a weighting-based fusion mechanism. Unlike classical switching-based approaches, the proposed strategy continuously combines the outputs of all local controllers through validity functions, ensuring smooth control action and improved performance across different operating regions.
(2) Integration of fault-tolerant control and observation: A Fault-Tolerant Second-Order Sliding Mode Multi-Controller (FT2SMMC) is proposed, which exploits a Second- Order Sliding Mode Observer (2SMMO) to simultaneously estimate system states and sensor faults in real time. These estimates are directly used to reconfigure the control law under faulty conditions, without requiring explicit fault magnitude identification.
(3) Reduced computational complexity and practical feasibility: The proposed approach avoids controller switching and complex fault reconstruction schemes, leading to reduced computational burden and enhanced suitability for real-time implementation.
(4) Experimental validation: The effectiveness and robustness of the proposed method are demonstrated through real-time application on a chemical transesterification reactor, confirming its practical relevance and superiority for fault-tolerant control of chemical processes.
The remainder of this paper is organized as follows. Section 2 introduces the multimodel framework. Section 3 presents the second-order sliding mode multi-observer (2SMMO). Section 4 develops the fault-tolerant multicontroller (FT2SMMC). Section 5 discusses the results of a real application on a chemical reactor under sensor fault scenarios. Finally, Section 6 concludes with key findings and outlines directions for future work.
Discrete decoupled multimodel representation
The multimodel approach is widely used to describe the real behavior of industrial processes due to its simplicity and effectiveness.28,29 Two main multimodel representations are generally considered. The first one, known as the coupled multimodel, employs a common state vector. Although straightforward, this structure cannot account for structural changes in the system. Regardless of the complexity of the system dynamics across different operating regions, the dimension of the state vector remains fixed, which may limit its applicability. In contrast, the decoupled multimodel representation removes this restriction by allowing each submodel to evolve with its own structure and state variables. In this framework, the global system is decomposed into a set of local submodels, each corresponding to a specific operating regime, while smooth transitions between them are ensured through weighting functions.
The discrete decoupled multimodel framework provides an effective way to represent complex nonlinear systems by decomposing them into several local linear models, each valid in a specific operating region. The global system behavior is then obtained by combining these local models according to their degree of validity.
Each partial model can be described by:

where,
The global multimodel output is obtained by fusion of the partial models using weighting functions

The weights

A common choice for
where
To facilitate analysis and implementation, all partial models are combined into a unified compact representation:

where,

This decoupled multimodel structure not only facilitates the modeling of nonlinear systems but also provides a rigorous framework for the design of advanced control and estimation strategies. Specifically, it enables the development of multicontroller and multiobserver architectures, where each controller or observer can be adapted to the dynamics of its corresponding sub-model. Furthermore, this representation offers a flexible framework to select the most appropriate strategy switching or fusion depending on the system and the sub-model partitioning. In operating regions where sub-models overlap significantly, fusion is generally preferred, whereas in regions with well-separated sub-models, switching strategies may be sufficient, allowing simpler implementation. Consequently, the overall system performance and robustness can be significantly enhanced across all operating conditions.
Second order sliding mode multiobserver: Fault and state variables estimation
The core principle of sliding mode multiobservers is to drive the estimation error dynamics to reach a predefined sliding surface, ensuring convergence despite external disturbances and parameter variations. A second-order sliding mode multiobserver (2SMMO) is constructed by interpolating a finite set of partial 2SMO observers, each associated with a decoupled multimodel representation.24,31 This strategy aims to improve the accuracy of both state and fault estimations.
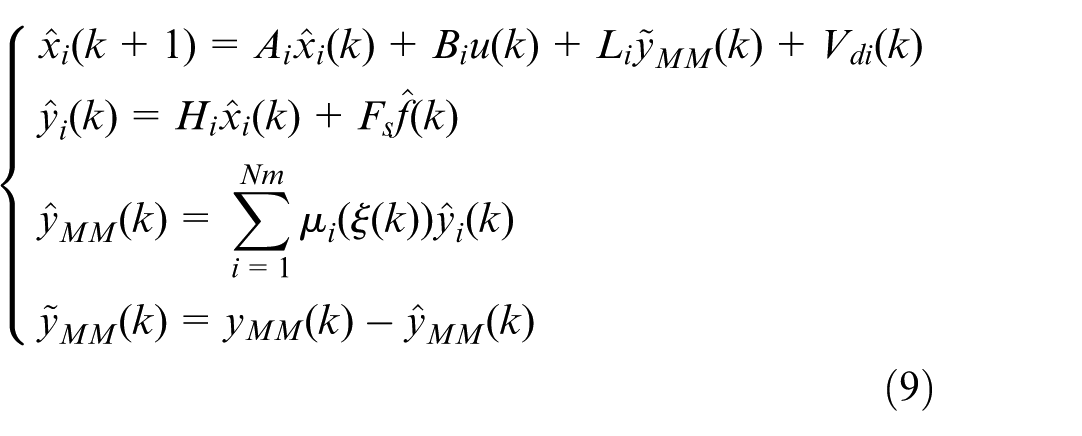
The decoupled state multimodel representation of a nonlinear system subject to a sensor fault can be expressed as:
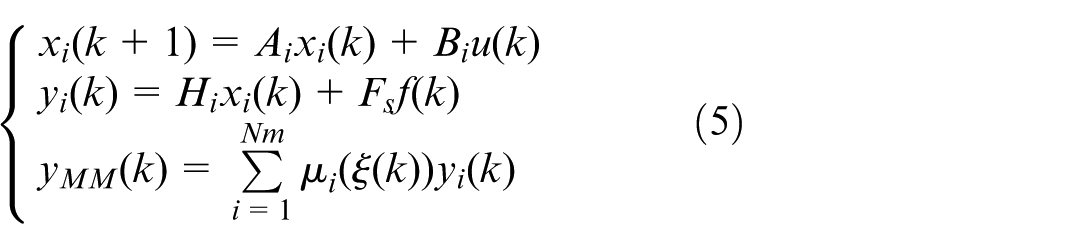
The considered decoupled state space multimodel approach provides an accurate model of nonlinear systems. This multimodel will be used in order to design a second order sliding mode multiobserver. In fact, for each linear model, a local second order sliding mode observer can be developed to estimate the partial model states and sensor fault.
Thus, the multiobserver output can be obtained by blending all the partial observer outputs with their respective weighting functions.
A compact representation for the system (5) is given as follows:

The sensor fault dynamics are modeled as:

where T
e
denotes the sampling period,

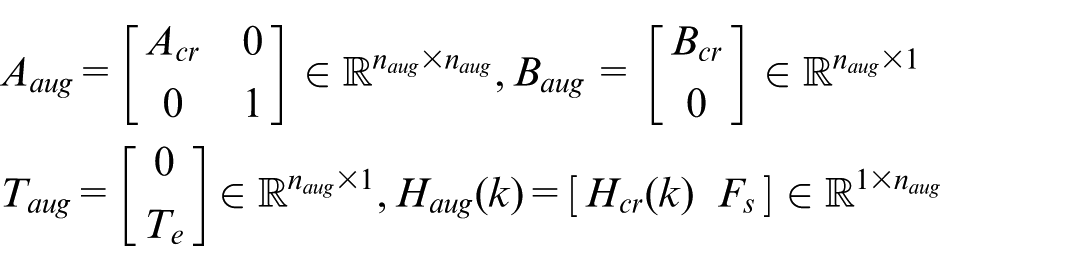
Choosing the augmented state vector as:

The system can be written in augmented form:
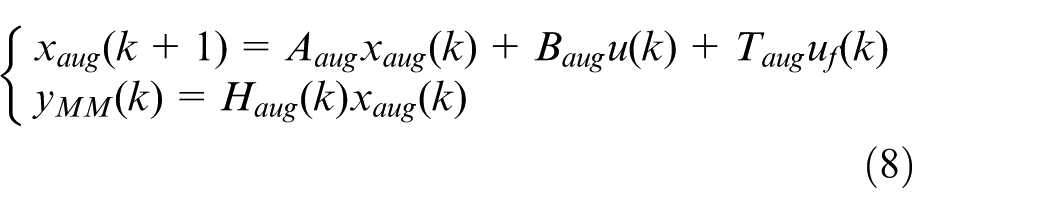
with
The proposed second order sliding multiobserver corresponding to the system (equation (5)) is written as:
where

with the usual signum function defined as:

In the design of the partial second-order sliding mode observer/control, faults.
The augmented form of the 2SMMO is written as follow:
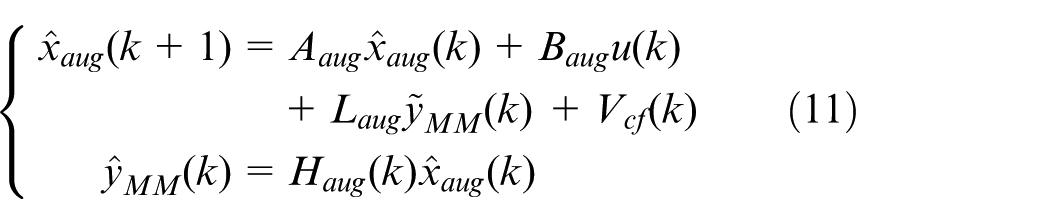
where

The augmented estimation error,

Considering the variation of the estimation error,

where

and

To analyze stability, a quadratic Lyapunov function candidate is considered as:

with P is a symmetric positive definite matrix.

The decrease of V(k) along the trajectories of the estimation error is ensured by deriving suitable matrix inequalities. The synthesis of the 2SMMO gain L aug , ensuring the convergence of the estimation error, can be stated in the following theorem:
There are two symmetric positive definite matrices P and Q, and four positive scalars

where

The variation of V(k) is expressed as:
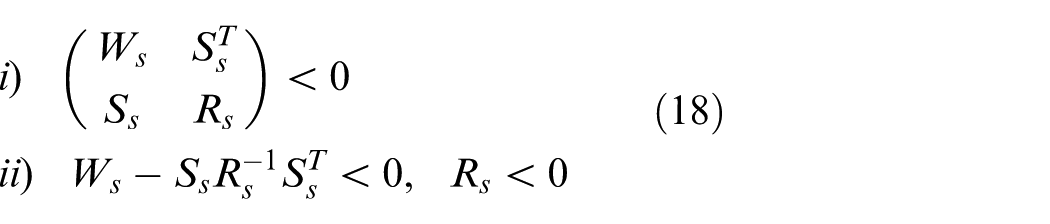
Asymptotic stability in the sense of Lyapunov is guaranteed if and only if:

From relations (equation (20)) and (equation (21)), the variation of the Lyapunov function
By applying the separation lemma (equation (17)) to the previous relation, where
Using the saturation function and considering the Lipsitchz approximation, 34 we have:

where
And:

where
The Lipschitz condition expressed in (equation (25)) guarantees that the nonlinear term remains bounded. Moreover, the scalar
Consequently, the component associated with

Lyapunov stability is achieved if there exists a symmetric positive definite matrix Q satisfying:
The Schur complement (equation (18)) is applied, leading to the following matrix inequality:

By applying the Schur complement to the quadratic term

Then, the extended block inequality (equation (19)) is obtained, thereby verifying the theorem conditions.
Hence, under the theorem’s conditions, the proposed second order sliding mode multiobserver guarantees asymptotic convergence of the estimation error and accurate state and fault estimation in the FTC framework.
Fault-tolerant second order sliding mode multicontroller using a fusion method
In this section, a fault-tolerant control strategy is developed by combining second-order sliding mode control with a decoupled multimodel based on fusion strategy. The fusion method exploits the validity of each partial model to generate a weighted control action, ensuring smooth transitions between operating regimes. By integrating multiple controllers associated with the submodels, this approach enhances the system’s robustness against disturbances, parametric uncertainties, and sensor faults.
The sliding function si(k) used in this case is as follows:

where G
i
is the coefficient of the sliding function,
The partial equivalent control must ensure a zero sliding surface:

where

When an ideal sliding mode is established, the state vector converges toward the sliding surface. The equation describing this sliding function is as follows:
This makes it possible to calculate the local equivalent control:

To ensure robustness, a discontinuous term is then added:

We can then deduce the ith partial second order sliding mode control:

As soon as a fault appears, we can write:

To compensate for the sensor fault, a corrective term

From relation (equation (33)), the partial equivalent control in the presence of a fault is written as follows:
The previous relation can be rewritten as follows:

The additive term is therefore:

So,

Finally, the fusion strategy adopted in this case leads to the global control:

where vi(k) is the degree of validity of each local model.
Validity calculation
The degree of validity of a partial model quantifies how accurately it reproduces the system’s dynamic behavior, which is essential for evaluating its contribution during model fusion. Among various calculation methods, the residual approach is generally preferred for its practical simplicity.
The residual ri(k) represents the difference between the output of a local model and the actual output:

where N
m
is the number of models in the database, y(k) is the system output and
The normalized residuals are formulated as follows:

The

The normalized validities

Sometimes, using the last expression of validity can allow less valid models to influence the final model. For this reason, it is often necessary to reinforce the contribution of the best-performing models in order to preserve the quality of the overall model.
This is achieved by the following expression:

g d is a synthesis parameter used to set the degree of validation reinforcement.
The normalization of enhanced validity is formulated as follows:

Figure 1 shows the block diagram of the fault tolerant second order sliding mode multicontroller.
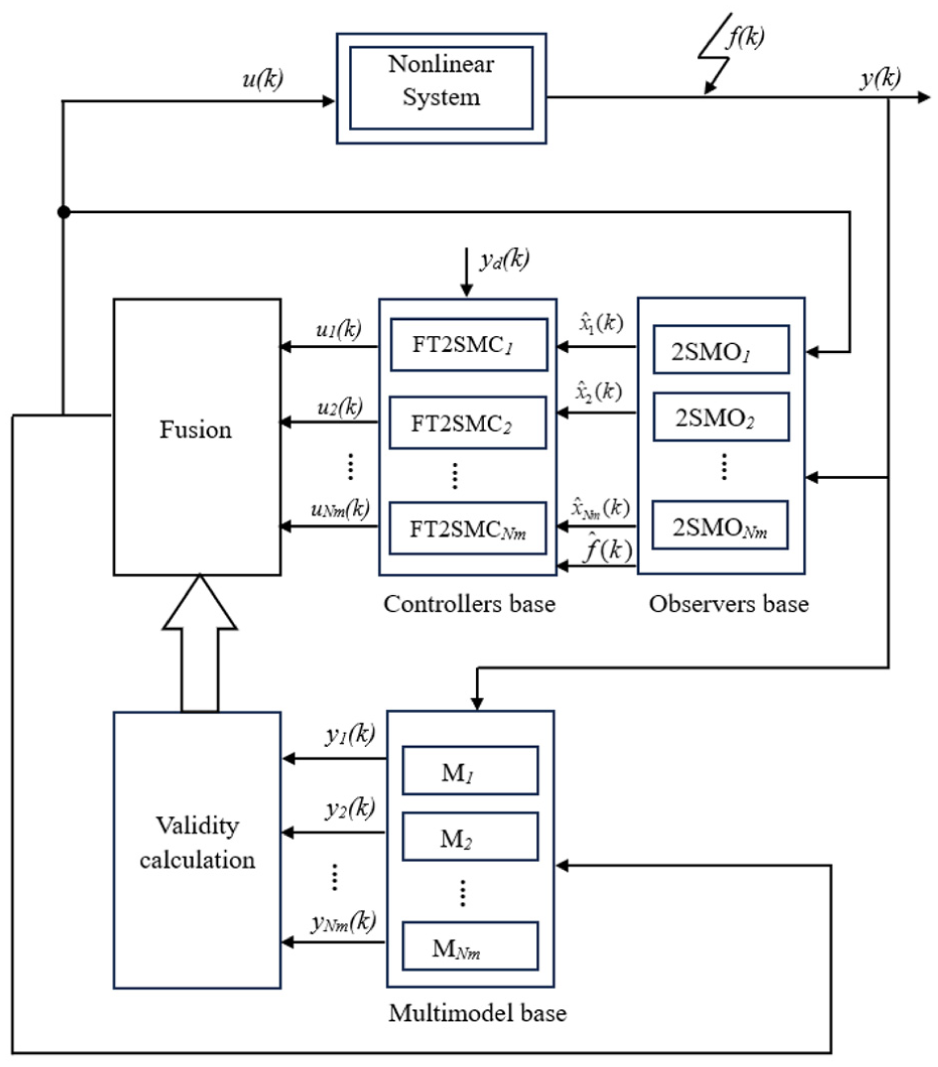
Block diagram of the fault-tolerant second-order sliding mode multicontroller.
The diagram presents a multimodel control framework in which each sub-model is associated with a dedicated Fault-Tolerant Second-Order Sliding Mode Controller (FT2SMC) and a corresponding second-order sliding mode observer (2SMO). The system outputs are compared to the outputs of the sub-models to compute residuals, which quantify each model’s validity. These validity indices are used in the fusion block to dynamically weight and combine the partial control signals from all FT2SMC controllers, generating a global robust and fault-tolerant control input applied to the nonlinear system.
Stability analysis
To evaluate the robustness of the proposed second-order sliding-mode controller with respect to parameter variations and modeling errors, the closed-loop stability is analyzed within the discrete-time quasi-sliding-mode framework.
The partial model of system (equation (5)) can be written in the following state–space form:

where, di(k) represents a lumped disturbance term accounting for parametric uncertainties, unmodeled dynamics, and external perturbations.
To facilitate the partial observer-based design and stability analysis, the system is next rewritten in an augmented form. Hence, the equivalent augmented representation is expressed as:

Based on the estimated augmented states, the sliding function is then defined as:

Thus, the sliding function becomes:
After rearranging terms, the sliding variable can be written as follows:

The sliding function variation is given by the following relation:
By introducing the discrete reaching control law and substituting it into the above relation, one obtains
Finally, the relation (equation (55)) can be written as:
where
In order to ensure the existence of a quasi-sliding mode, the following conditions must be satisfied:

Furthermore, it is assumed that, for all k, the variation of the disturbance satisfies the boundedness condition

where, D 0 represents the upper bound of the disturbances uf(k) is assumed to be bound as previously stated.

then the above quasi-sliding-mode conditions are guaranteed.35,36
It should be emphasized that parameter uncertainties, modeling errors, and tuning inaccuracies mainly affect the lumped disturbance term di(k) and its variation, which may potentially deteriorate the reaching and invariance properties of the sliding motion if not properly compensated. An insufficient choice of the gain
However, by enforcing the condition
A real application on a chemical reactor
The proposed sensor fault-tolerant second order sliding mode multicontroller is implemented on a transesterification reactor to illustrate its practical relevance and effectiveness in chemical process control.
The experimental setup of the chemical reactor is shown in Figure 2.
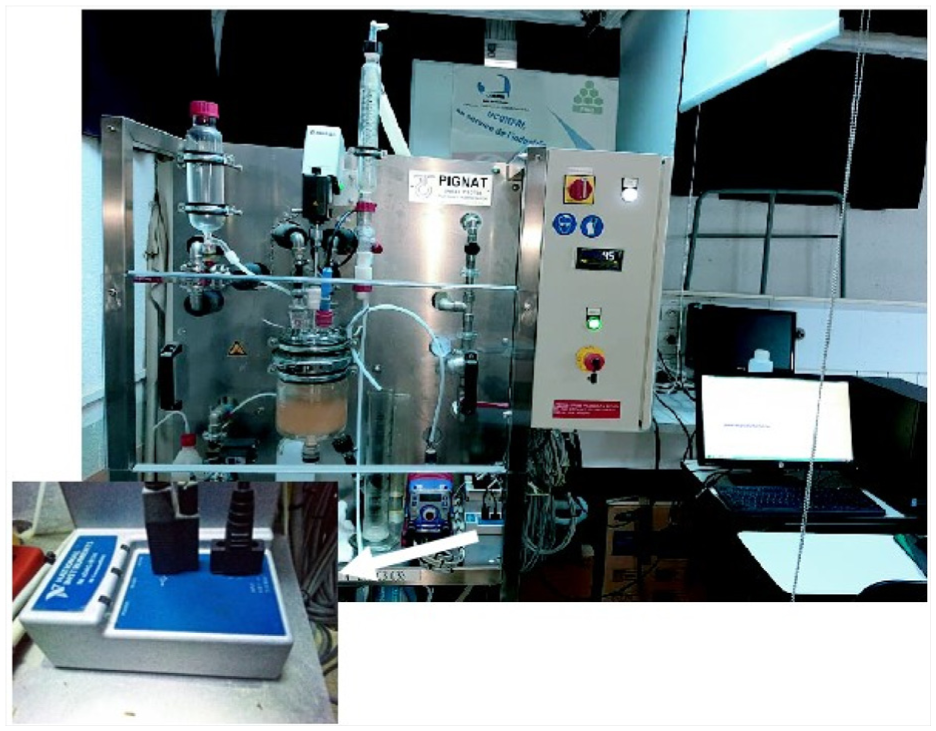
Experimental setup of the chemical reactor used for the transesterification process.
This type of vessel is widely employed in industrial, pharmaceutical, and chemical processes.37,38 The reactor comprises a storage tank equipped with a jacket, where heat exchange occurs between the reaction mixture and a circulating thermal fluid. The fluid flow rate is kept constant, while an external servo system with a plate heat exchanger and electrical resistors regulates the jacket temperature. Heating is provided by electrical resistors, whereas cooling is achieved using tap water via the heat exchanger. Temperature sensors are installed to monitor the process.
In this study, the reactor operates in batch mode to carry out a transesterification reaction, where animal fats or vegetable oils (triglycerides) react with alcohol to produce esters (biodiesel) and glycerol. 39 This process, also referred to as alcoholysis, reduces the viscosity of triglycerides and yields alkyl esters of long-chain fatty acids, widely recognized as biodiesel. Biodiesel represents a promising alternative to fossil fuels, with applications in transportation, agriculture, and industry.
The real-time implementation of the proposed discrete fault-tolerant second-order sliding mode multicontroller (FT-2SMMC) on a chemical reactor has been performed using a personal computer (PC) and a data acquisition card (NI cDAQ-9174), as shown in Figure 2. The data acquisition card enables signal transmission between the reactor and the computer, allowing real-time monitoring and control.
The proposed FT-2SMMC-based fusion scheme is computationally efficient and suitable for real-time execution on standard hardware. Sensor noise is mitigated by the inherent robustness of the sliding mode techniques, and the system operates within the timing constraints of the data acquisition hardware. These considerations ensure the practical applicability of the proposed method in real-world scenarios.
The reactor is modeled as a single-input–single-output (SISO) system, where the heater power is the input and the process temperature is the output.
The modeling of this reactor is based on a multimodel identification that captures its nonlinear behavior. After applying the multimodel identification procedure with a sampling period equal to 120 s, three submodels are obtained:40,41



The centers and dispersion considered in multimodel identification are as follows:

The matrices P and Q, the scalars
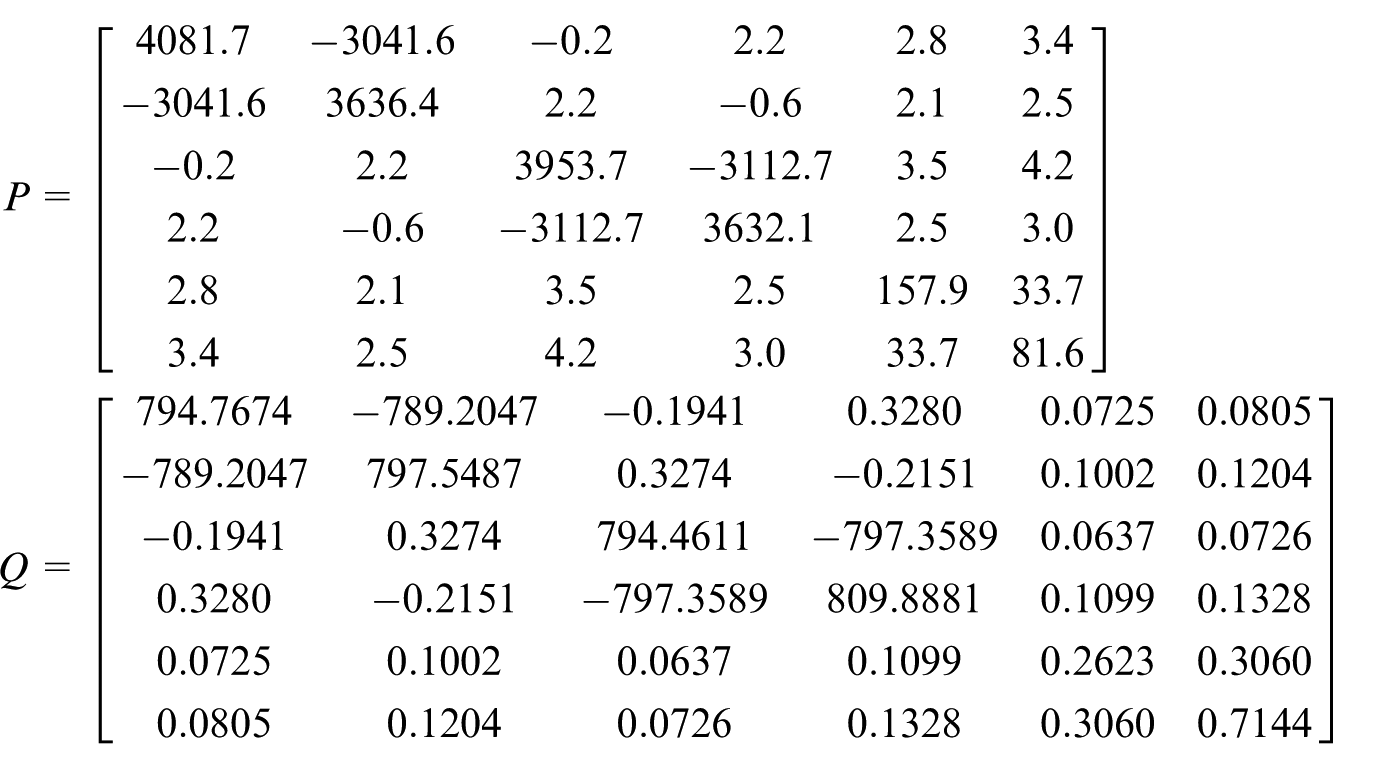


The vector M aug is selected as follows:

The controller parameters are tuned according to the stability conditions derived and are set as follows:
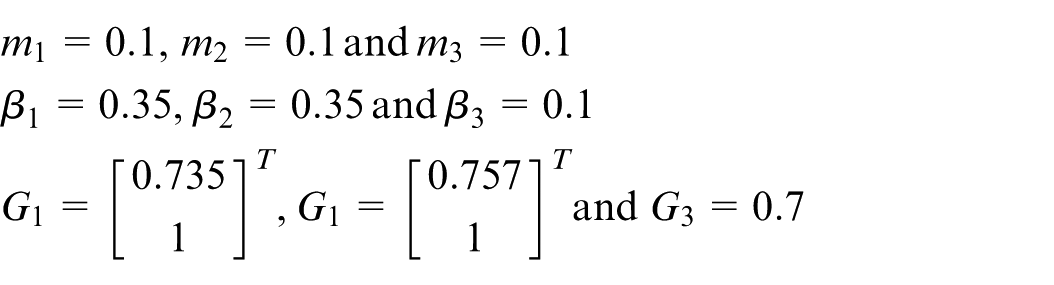
Figure 3 illustrates the evolution of the considered sensor fault, namely an additive incipient fault modeled as a delayed ramp signal to represent its gradual and progressive behavior.
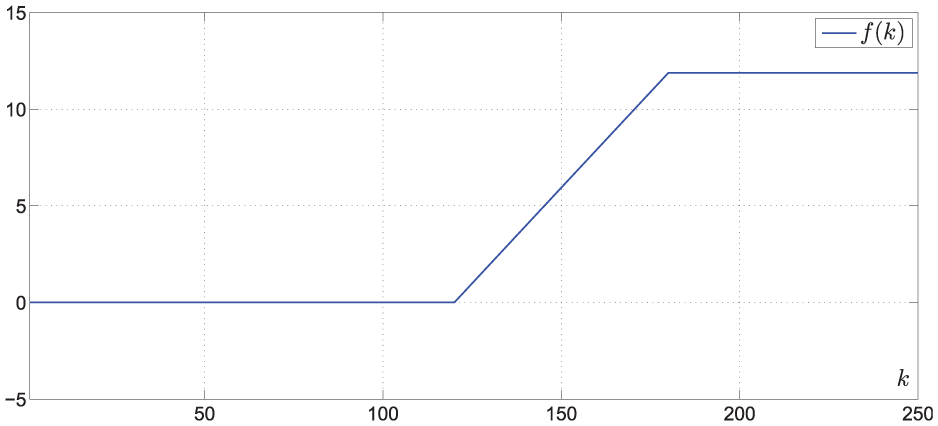
Sensor fault evolution.
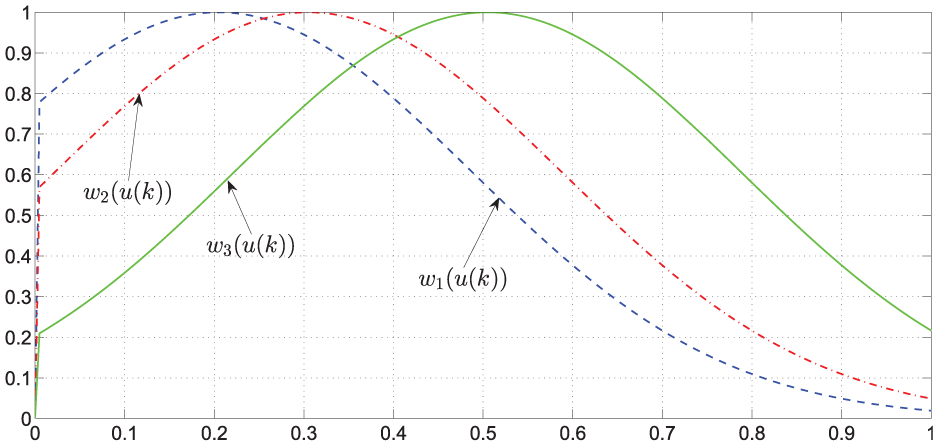
In this case, the strong overlap between sub-models reveals that several models can be simultaneously valid, each contributing with a different degree of relevance depending on the operating region. Figures 4 and 5 illustrate this phenomenon by showing the evolution of the Gaussian membership functions and their corresponding weighting functions.
Evolution of Gaussian functions
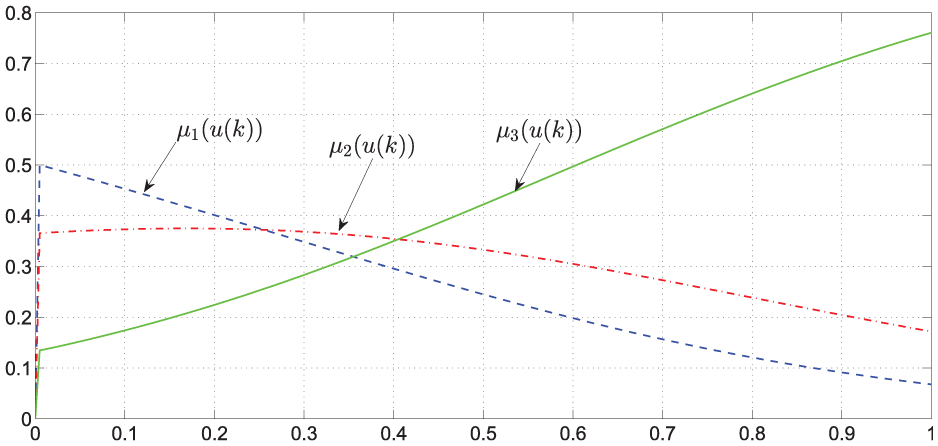
Evolution of weighting functions
The figures clearly demonstrate that the validity domains of the sub-models are not strictly separated. Instead, multiple sub-models remain partially active at the same time, with their influence varying according to the local operating point. Such overlap ensures continuity in the multimodel representation, avoiding abrupt switches between models. However, it also raises the challenge of properly combining the contributions of the active sub-models.
This observation highlights the necessity of adopting an appropriate fusion strategy. By weighting the sub-models according to their degree of validity, the global system dynamics can be represented more smoothly and accurately, thus improving the effectiveness of the controller design.
The transesterification reactor is subjected to a control signal (heating power) calculated by the FT-2SMMC multicontroller. Figures 6 and 7 show, respectively, the evolution of the control and the temperature of the reaction medium and the setpoint. A relatively perfect tracking of the desired trajectory was achieved despite the presence of a sensor fault.
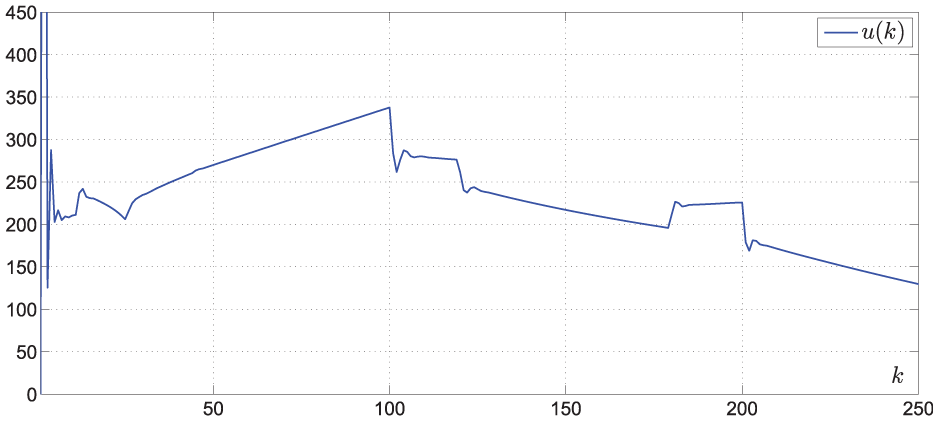
Evolution of heating capacity.
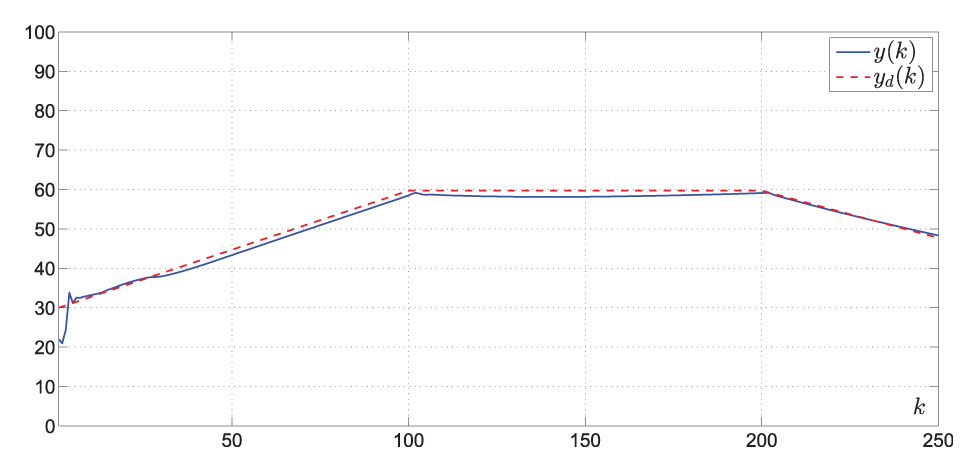
Evolutions of reaction medium temperature and the setpoint.
This suggests that the implemented control strategy was able to maintain performance by compensating for the sensor fault effect. Indeed, the FT-2SMMC multicontroller, was able to maintain the desired performance, as shown in Figure 8 illustrating the evolution of the relative error between the actual output (reaction medium temperature) and the desired temperature profile (heating, reaction, cooling).
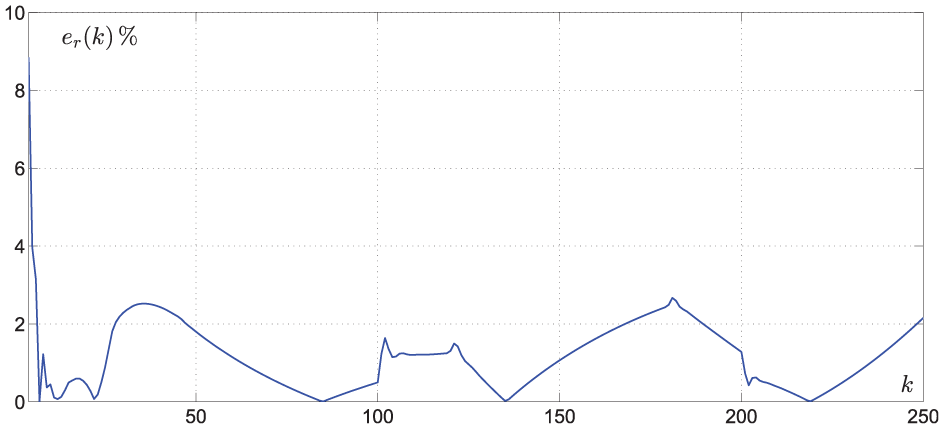
Evolution of the relative tracking error.
Figure 9 shows the evolution of the degrees of validity.
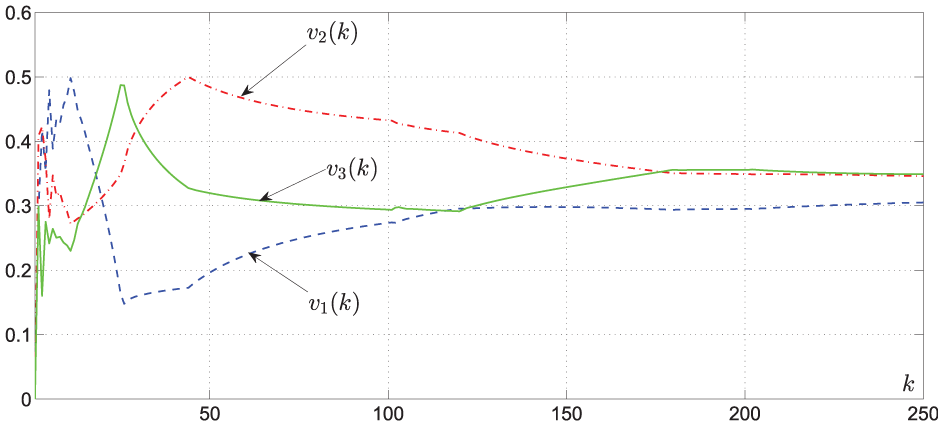
Evolution of validities.
To extend the evaluation of the proposed control strategy under diverse fault conditions, additional sensor fault scenarios are considered (see Figure 10). Figure 11 presents the temporal evolution of the real outputs obtained using the proposed FT-2SMMC-based fusion approach in the presence of an additional sensor fault scenarios.
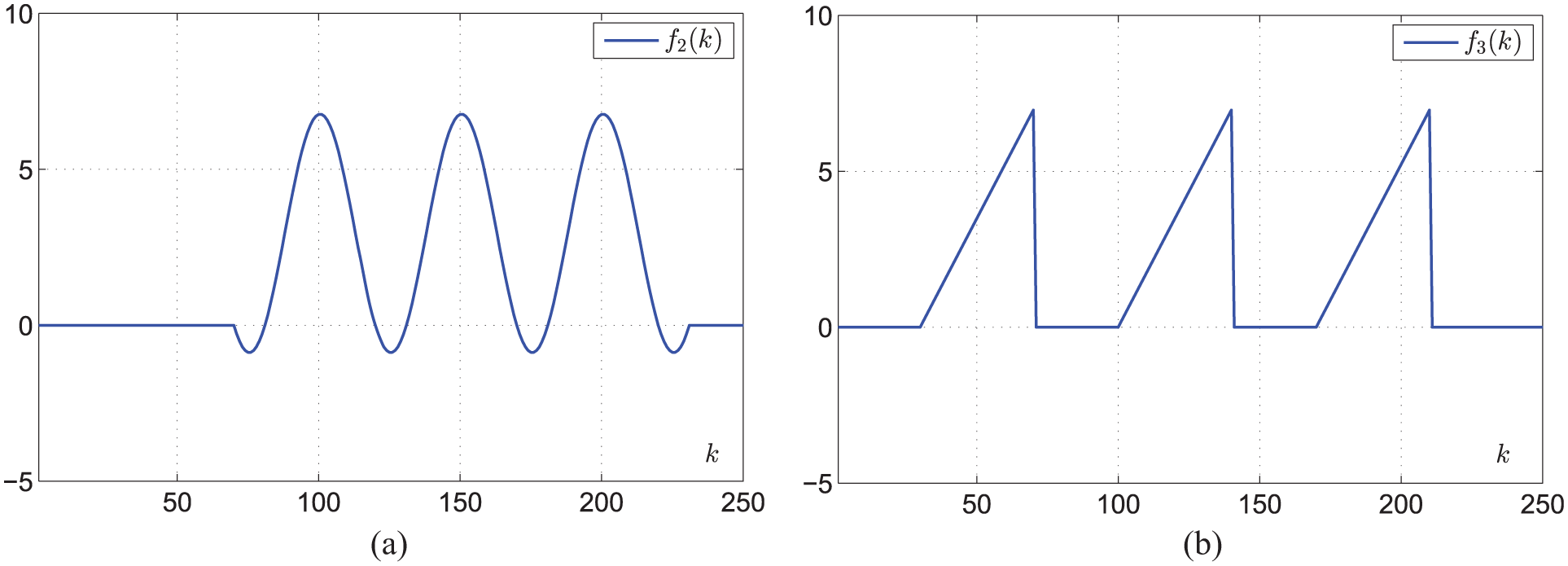
Sensor fault scenarios considered in the study: (a) Fault 2: additional sensor fault and (b) Fault 3: additional sensor fault.
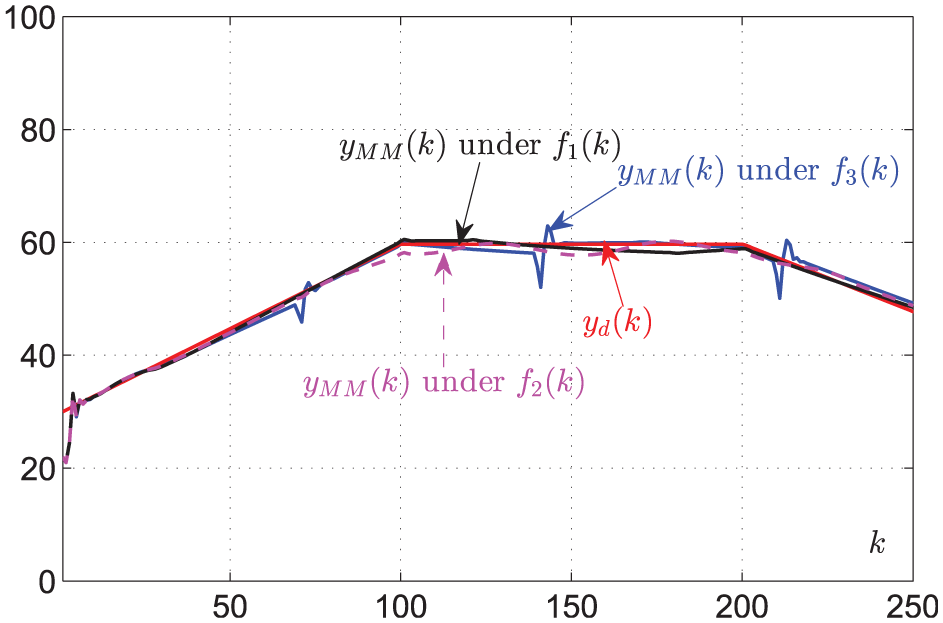
Evolution of the desired and real outputs under different fault scenarios.
The results clearly indicate that the proposed FT-2SMMC-based fusion method ensures effective fault compensation while preserving accurate output tracking. Comparable performance is achieved across the different sensor fault types, which highlights the robustness and adaptability of the proposed control framework under varying sensor degradation scenarios.
To demonstrate the effectiveness and performance improvement of the proposed FT-2SMMC based fusion method, a comparison with the conventional FT-1SMMC strategy was conducted. Figure 12 presents the evolution of the real system outputs obtained under both control schemes.
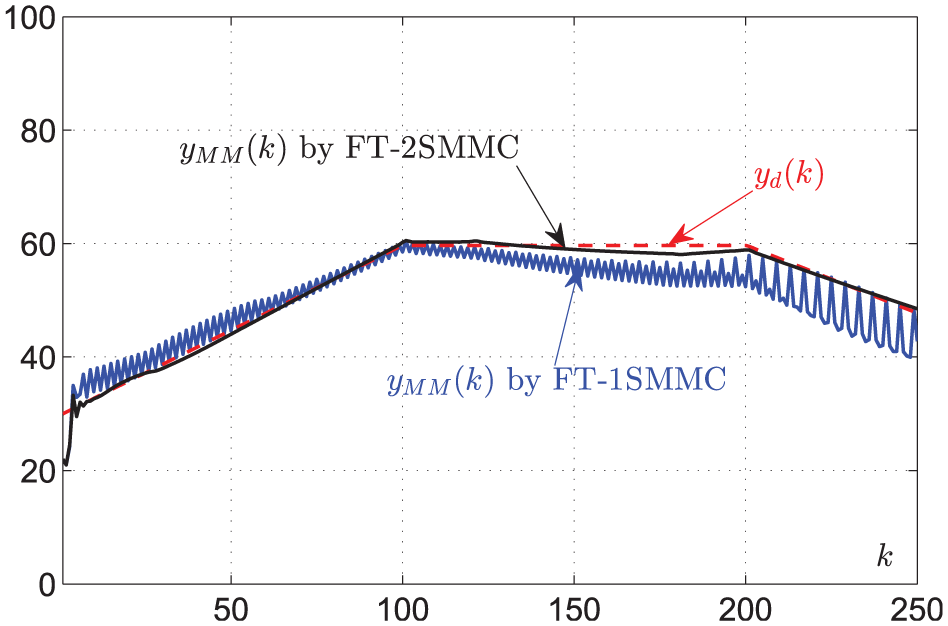
Comparison (FTC-1SMMC/FT-2SMMC).
As illustrated in the previous figure, the FT-2SMMC-based fusion strategy demonstrates superior performance compared to the FT-1SMMC. This improvement is primarily attributed to its enhanced capability to mitigate chattering and increase control precision, leading to more accurate reference tracking and improved closed-loop stability, even under sensor fault conditions.
The second-order sliding-mode multi-observer has once again confirmed its ability to accurately estimate state variables and the sensor fault (see Figures 13 –18). This accuracy enables the FT-2SMMC control to achieve its objectives with satisfactory performance.
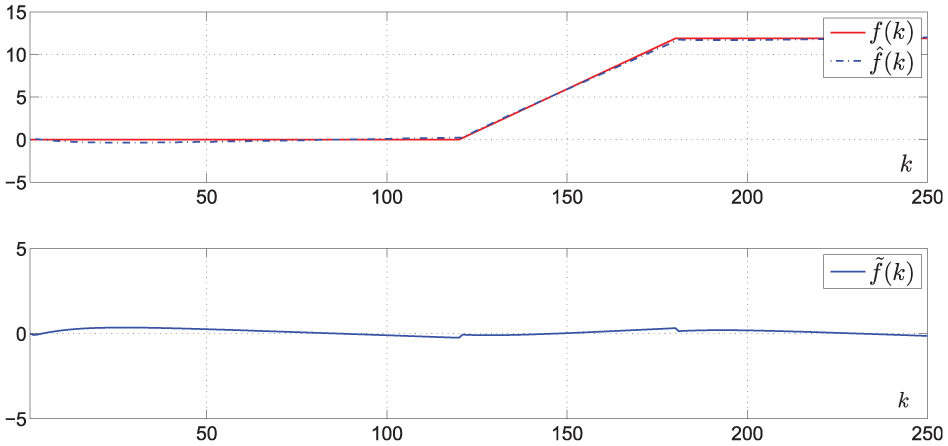
Evolution of real and estimated fault, and estimation fault error.
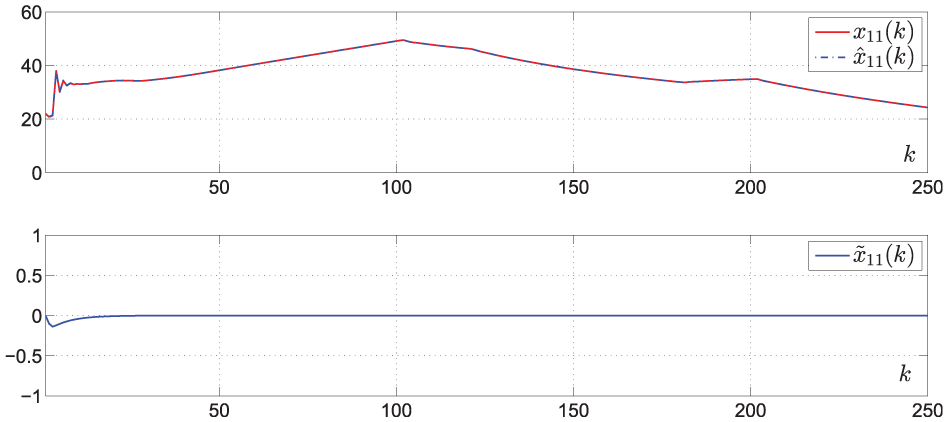
Evolution of
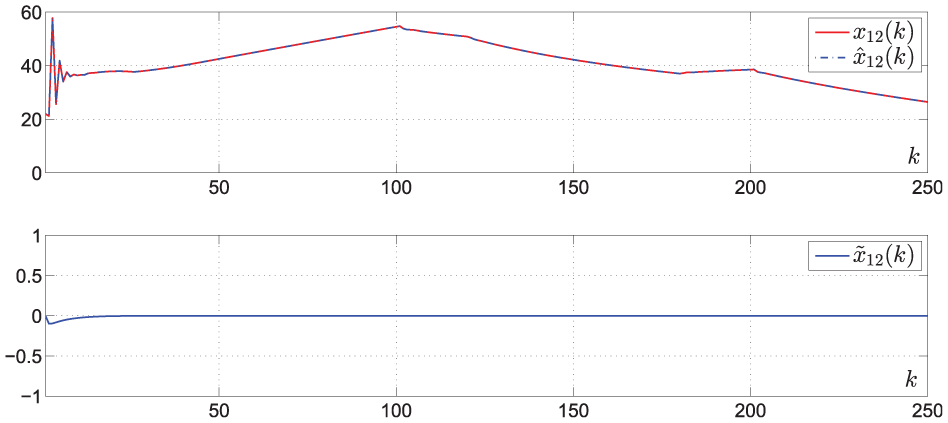
Evolution of
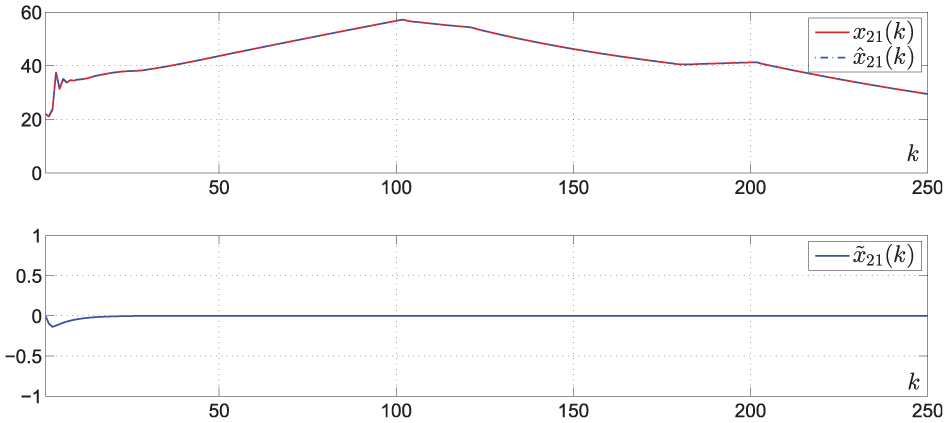
Evolution of
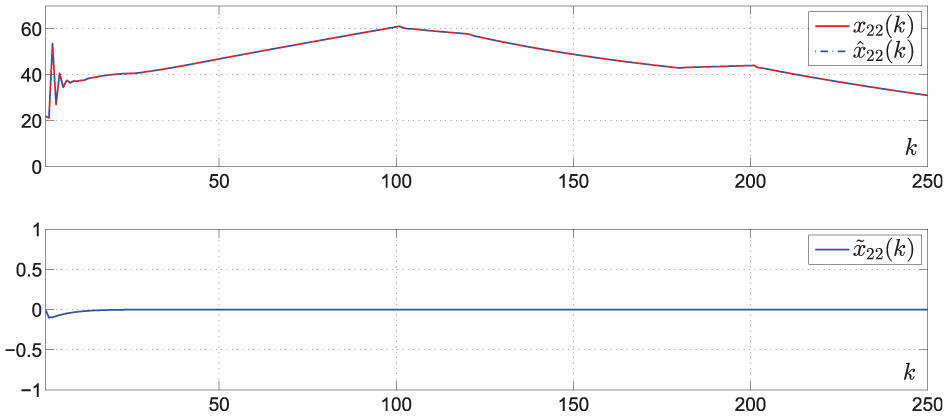
Evolution of
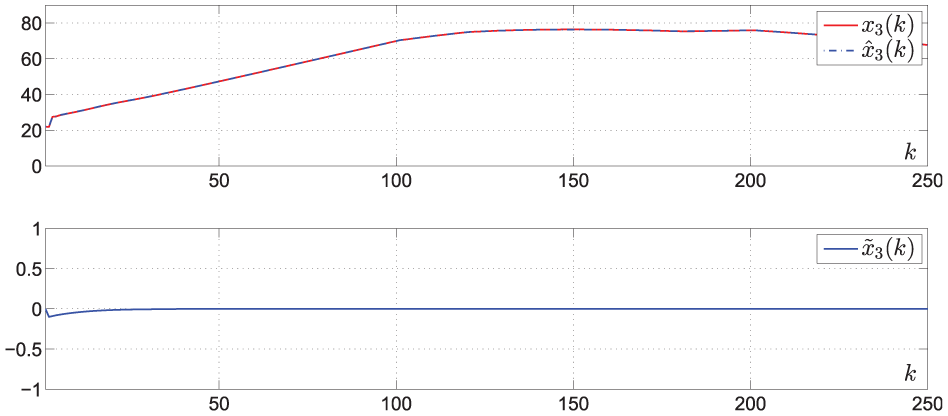
Evolution of
Conclusion
This paper has presented a novel fault-tolerant control framework for nonlinear systems affected by sensor faults, based on a multimodel fusion strategy. An uncoupled multimodel representation incorporating sensor-fault effects has been adopted. A second-order sliding mode multiobserver (2SMMO) has been chosen for its robustness and has been used to support the design of the fault-tolerant second-order sliding mode multicontroller (FT-2SMMC), enabling simultaneous estimation and compensation.
The proposed methodology has been validated on a chemical reactor case study, where it has achieved accurate state estimation and effective compensation of sensor fault effects.
Although the present work focuses on sensor faults with specific dynamics, several extensions can be envisioned. Future research will aim to extend the framework to actuator faults, more general fault dynamics, and multivariable nonlinear systems. Other potential directions include handling communication delays and unmeasurement noise, which would further enhance the practical applicability, robustness, and scalability of the proposed approach.
Footnotes
Ethical considerations
This research did not involve any human or animal subjects and therefore did not require ethical approval.
Consent to participate
Consent to participate is not applicable.
Consent for publication
Consent for publication is not applicable.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the ministry of Higher Education and Scientific Research in Tunisia.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statements
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.