
Abstract
This paper presents a novel leak-flow estimation scheme and its application to the robust stabilization of fluid power systems, with a specific focus on coupled tanks in a gravity-fed cascade configuration. The motivation behind this work is to improve the certainty of the control process, where safety and performance are paramount concerns, as typically required for fluid-level control and leak-flow estimation. The proposed leak-flow estimation scheme employs a predefined-time control strategy to ensure that leak flows are accurately estimated within a designer-defined time frame during the tuning phase. This methodology enables the timely detection and precise estimation of leaks that can degrade system performance, cause environmental pollution, and compromise the entire process. By compensating for the effects of leaks, the system achieves a high level of autonomy and maintains regular operation despite disturbances. A series of simulations conducted on a two-coupled-tank system, including comparative analyses, illustrates the efficacy and relevance of the proposed approach in a simple yet representative scenario.
Introduction
The history of fluid-level regulation spans several centuries, and its development has accelerated during the various stages of the Industrial Revolution. For instance, the advancement of control theory, particularly the introduction of operational amplifiers and the adoption of PID control, has helped improve the performance of fluid-level control in various industrial environments. Although passive controllers and floating-based mechanisms remain popular, electromechanical and mechatronic implementations, which utilize electronic sensors, have become predominant. Furthermore, the increasing use of programmable logic controllers in the last decades has also contributed to this change. In recent years, new advances in microcontrollers and other digital systems have enabled the implementation of robust techniques as well as the integration of artificial intelligence applications.1,2
Chemical industry processes have become increasingly complex, often involving liquid-phase reactions that transform raw materials into a wide range of products. Therefore, it is imperative to maintain a high degree of control over the variables influencing these reactions, as they directly impact the quality of the entire process and, consequently, the final product.3–5 Among the numerous variables that affect reaction outcomes, such as pressure and temperature, the fluid levels in reactors and the flows between them are particularly significant, especially when the desired reaction requires a continuous flow of reactants. In particular, this study focuses on robust, accurate, and efficient leak-flow estimation in a system of coupled tanks arranged in a gravity-fed cascade configuration. As a byproduct of the proposed method, estimated leak flows are used to implement a robust control strategy that ensures that the system operates under normal conditions.
The leak detection problem poses significant challenges due to the presence of noise component in the measurement of fluid-level and flow signals; structural complexities resulting from the coupling dynamics of tank walls and pipelines; and sensor variations with respect to pressure and temperature conditions. Consequently, conventional leak detection methods, such as acoustic techniques, pressure and flow monitoring, and mass balance, often suffer from limited accuracy and operational difficulties, which in turn increase system uncertainty.
Estimation time is another critical limitation, as uncertain or prolonged detection delays reduce confidence in the system’s integrity. During this transient period, operational certainty remains low, while the leak detection system attempts to determine the presence of any process fault.
This study leverages fault-tolerant control,6–8 which aims to ensure the continuity of the process in the presence of faults and, in some cases, under variations in system parameters. Various strategies have been used to control and estimate coupled tanks. For example, fuzzy logic and neural networks have been utilized to robustly approximate unknown effects.9–11 Similarly, sliding mode techniques have been proven to be reliable alternatives due to their robustness and simplicity, which makes them practical for maintaining the process with acceptable performance.12,13 Numerous control techniques have been implemented for such applications. Outstanding reviews also describe a wide range of available approaches.14–16
Leak detection in fluidic systems is essential for ensuring operational safety. In particular, leak detection in fluid reservoirs and pipelines has emerged as a critical issue,17–21 playing a vital role not only because it affects fluid flow between reservoirs, but also because leaks can cause significant financial losses and pose environmental threats that are increasingly relevant in current discourse.22–24 Overall, undetected leaks can lead to hazardous conditions, equipment failures, and catastrophic accidents in industrial settings, particularly under high-pressure conditions or when operating with hazardous chemical components.
The proposed strategy involves designing a predefined-time estimator for time-varying leak flows in liquid reservoirs. The liquid level of each tank is regulated using an electrically driven valve. Furthermore, once leak flows have been estimated within a predefined time frame, they are compensated through the controller, thereby avoiding the effects of fluid losses and allowing the process to operate normally. The proposed scheme relies on the concept of predefined-time stability, which involves studying dynamical systems whose solutions converge to their equilibrium before a finite time that is upper-bounded by a constant parameter, which is tunable during the design stage.25,26 Predefined-time schemes offer a high degree of certainty in assessing system performance,27–30 because they allow for the exact state prediction after a selected moment. Moreover, robust control under time constraints has been applied in high-order integrator systems using time-based generators, 31 spacecraft vehicles, 32 high-order multi-agent systems, 33 and attitude tracking. 34 Additional applications of fixed-time schemes, and their variations, are available in.35–39
It is essential to note that performance and robustness limitations arise when the control scheme operates under time constraints and is nonautonomous, meaning the control parameters are time-dependent. Although the designer can resolve these problems by employing well-suited time mappings, this is beyond the scope of this study. These issues were addressed in detail by Aldana-López, et al. 40 which motivated the present study to adopt an autonomous design.
This study contributes to a fast and robust control algorithm that accurately estimates leak flows in coupled tank systems operating within a predefined time frame established during the control design process. Information about the presence and shape of leak flows is used to compensate for fluid losses, allowing for robust regulation of fluid levels.
The proposed contribution involves designing a fast, reliable, and robust control algorithm to accurately estimate leak flows in a system of coupled tanks. The proposed approach differs from existing methods, as it enables the estimation of any leak flows within a predefined time frame established during control design. Unlike conventional methods that focus primarily on control or detection, the proposed approach actively estimates leak flows to compensate for fluid losses, ensuring robust regulation of the fluid level while maintaining normal operating conditions. The combination of predefined-time estimation and fault-tolerant control enhances system reliability and reduces uncertainty compared to traditional techniques.
The remainder of this paper is organized as follows. The next section discusses the concept of predefined time stability. Subsequently, the document presents a model for the coupled tanks in the cascade configuration. Furthermore, the main contribution of this study is the procedure for estimating leak flow over a predefined time period. Subsequently, a simulation study was conducted considering a system of two coupled tanks in cascade configuration. Finally, the main conclusions of this study are presented.
Predefined-time stability
The predefined time stability was revised as follows: Consider the dynamical system,

where
In this study, the trajectories of (1) are required to reach the origin within a predefined time
The fundamental work of Jimenez-Rodriguez et al. 44 explored a broad class of predefined time-stable systems, in which the primary concept of predefined time stabilization is outlined as follows:

where function
Then, the system (2) is fixed-time stable, ensuring that

This system can be equivalently expressed as the equation in differentials,

Since function
to indicate the main statement.

as it satisfies all the required properties, including
Substituting
As

with
The inequality above demonstrates that
Integrating the differential inequality from
using the same reasoning as in the proof of Lemma 1. Because
System modeling
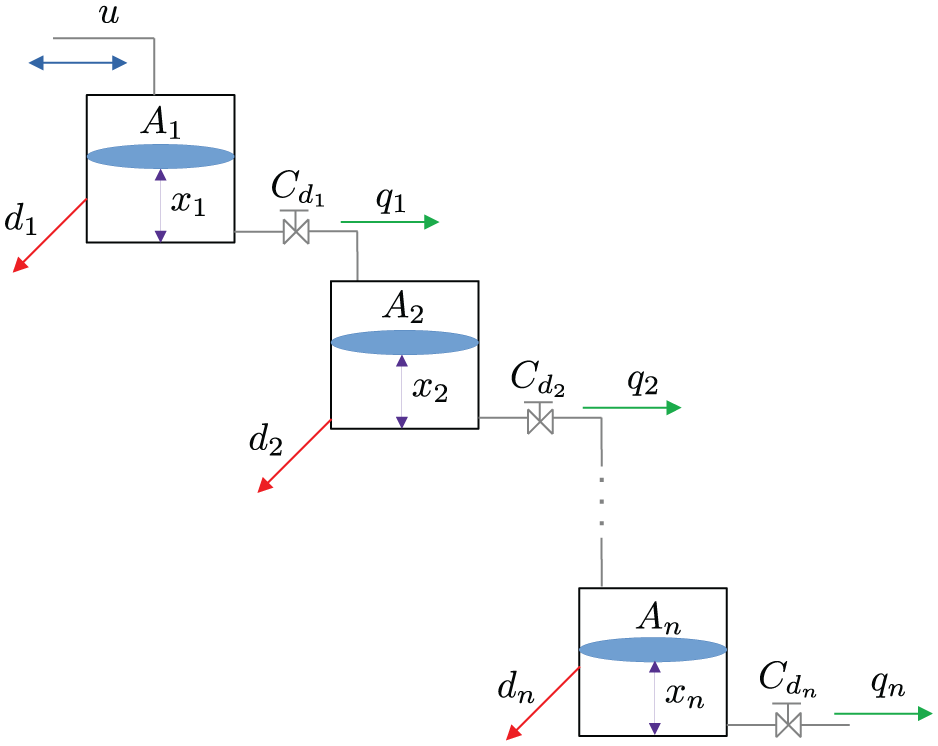
The model of a system of coupled tanks in a gravity-fed cascade configuration assumes that the fluid volume rate of change in each tank is equal to the difference between the sum of the input flows and the sum of the output flows. Based on this principle, the mathematical representation of the system shown in Figure 1 can be described as follows:

where:
System of
It is worth noting that control
The term

where:
Predefined-time leak-flow estimation
The observer dynamics is designed as a model of the system described in (10), where the leak-flow estimators are formulated as correction functions. These functions depend on the deviation between the fluid levels of the observer and the actual system. The dynamics of the observer are given by

where

The leak-flow was estimated using the following formulation.

where
The first contributions of this study are summarized as follows.
The leak estimator employs a discontinuous sign function to guarantee predefined-time convergence. However, for simulation or real-time implementation, it is recommended to replace the discontinuous sign function,
Fluid level regulation
The primary control objective is to design the control signal
For the first tank, the goal is to regulate the fluid level

where
The control input
where
For

This ensures that
It is worth noticing that due to the intrinsic nature of the system, the controller results as a bounded function.
For the

where
In this case, the discharge coefficient
where
To account for physical constraints,
If
If
Assuming that

ensuring that
The main contributions of this study are summarized as follows:
The motivation for considering a switching strategy in the control design, where detected leaks are compensated immediately after the predefined time
Simulation study in a system of two coupled tanks
The simulation study aims to demonstrate the reliability of the proposed approach and describe its implementation in a system of two coupled tanks in a gravity-fed cascade configuration, which is modeled by the following equations:

where
In this analysis, the control input
Simulation parameters for a system of two coupled tanks in cascade configuration.
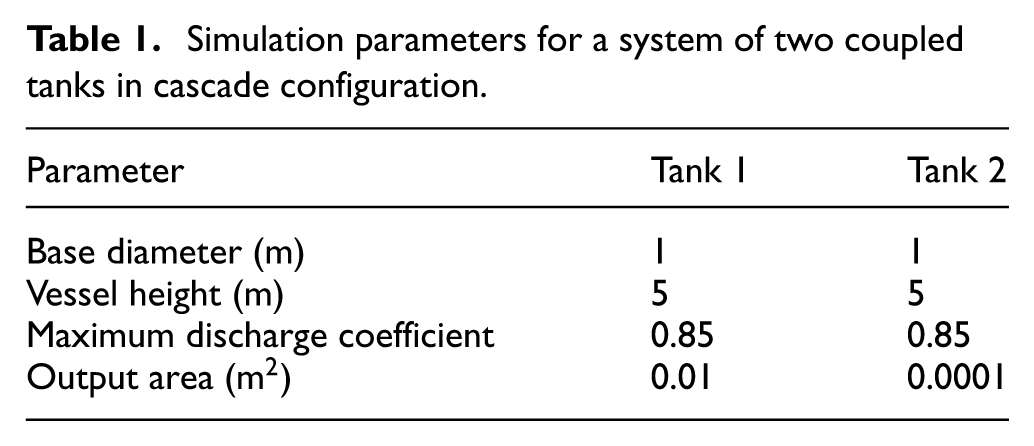
The simulation parameters considered in the present simulation, including tank dimensions, discharge coefficients, and outlet areas, were selected to represent a typical coupled-tank configuration, where the different output areas introduce a certain degree of asymmetry, challenging the accuracy and robustness of the estimation and control schemes. This selection also enables the evaluation of the proposed algorithm under realistic conditions, where operational and structural variations occur, such as the presence of noise and uncertainties.
The observer design employs a predefined time-generating function:

where
The control functions
To improve the numerical stability of the estimation algorithm, the discontinuous term
The leak functions were modeled as follows:


The simulation was implemented using MATLAB Simulink, with the system modeled in block diagrams. The Euler integration method was used with a sampling frequency of 100 kHz to ensure numerical accuracy.
Noise-free case
The first study implemented a control without prior knowledge of leaks. As shown in Figure 2, the regulation of the fluid level achieves an acceptable performance even under these conditions. However, there is a noticeable deviation from the nominal values owing to the absence of leak information, which may cause potential issues during the process evolution.
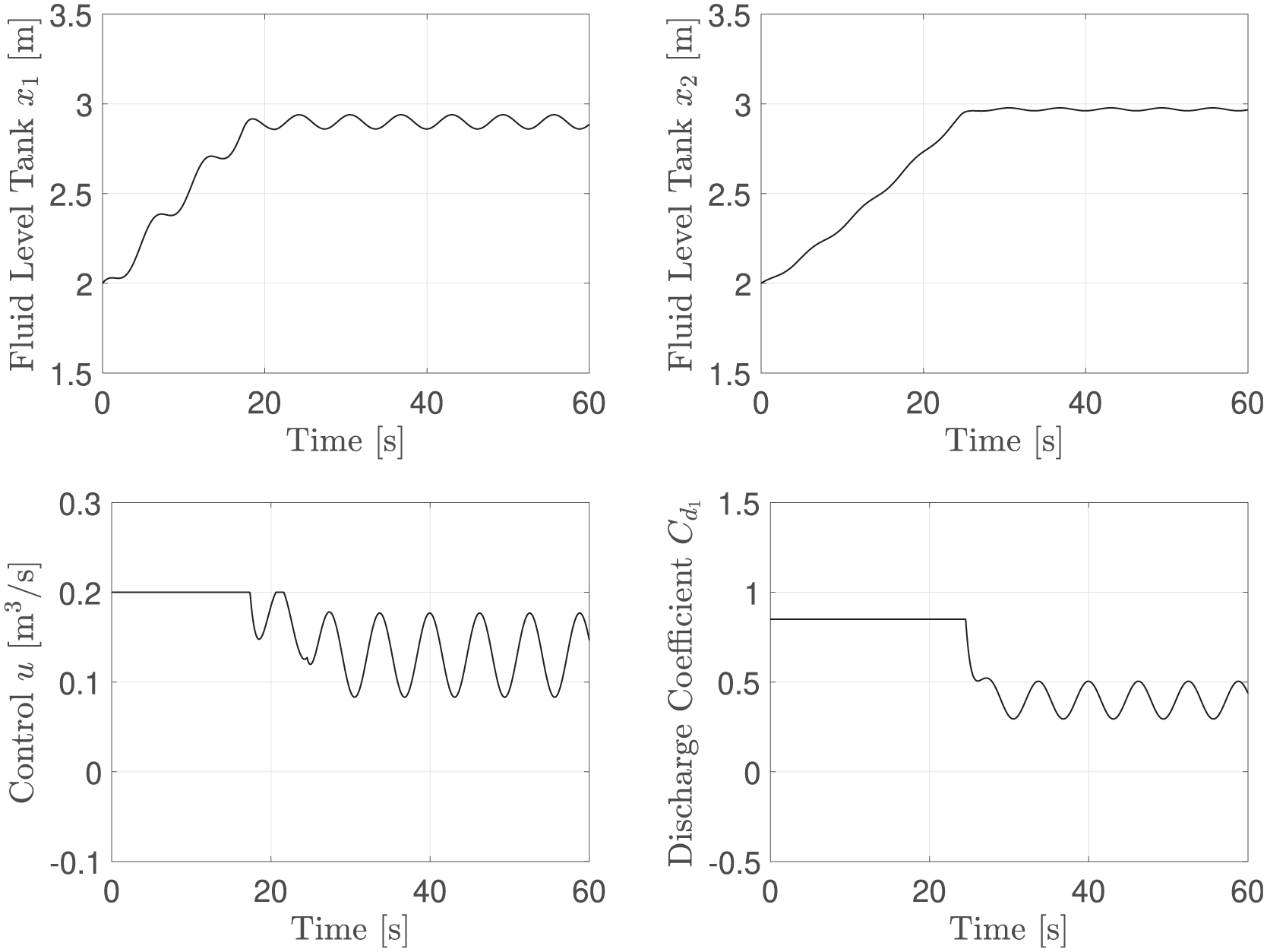
Control without leak-flow estimation.
The simulation results for the noise-free case, which incorporates dynamic estimation of leak flows, are presented in Figure 3. Both
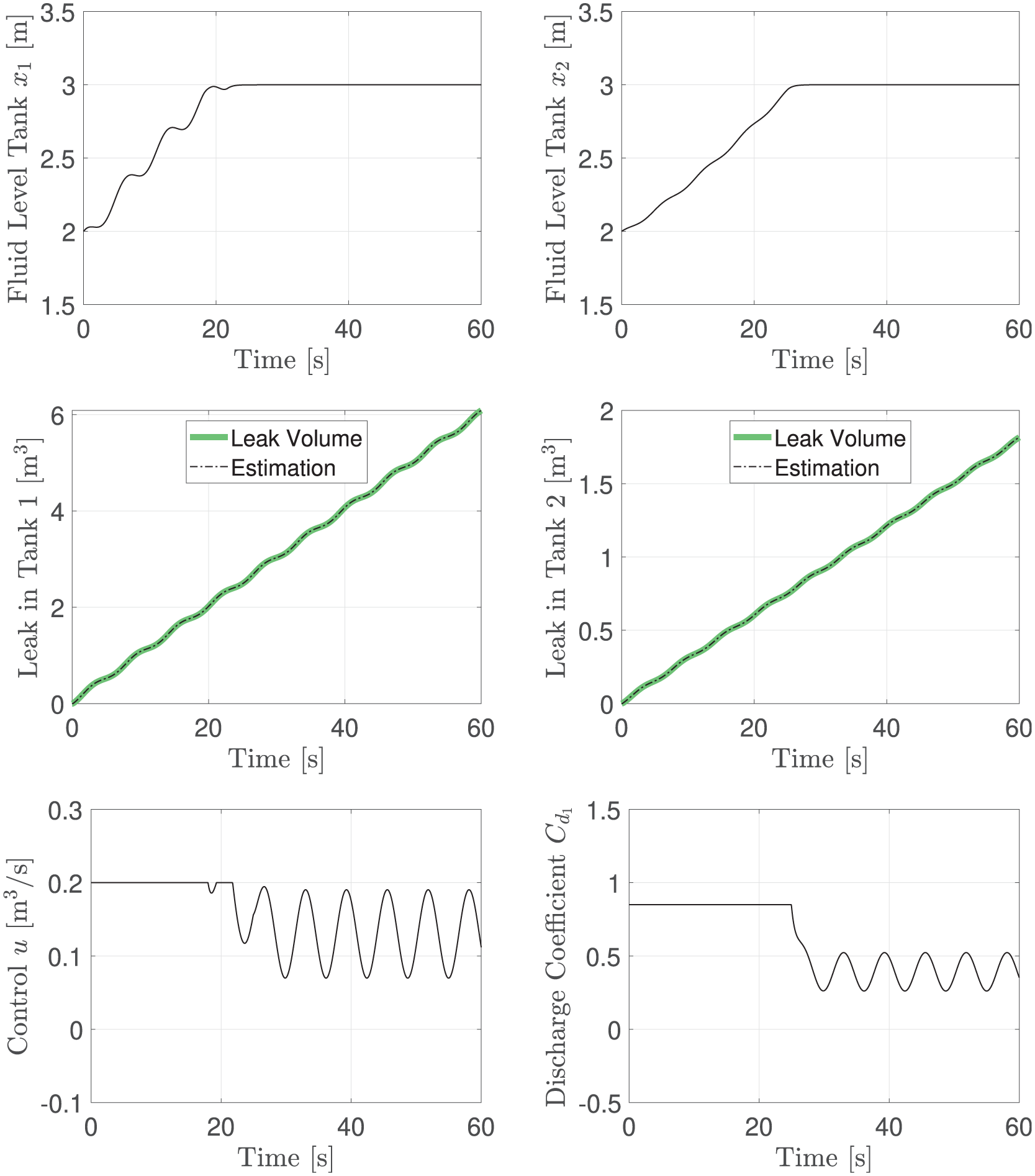
Noise-free case: Predefined-time leak-flow estimation.
Furthermore, the leak volumes estimated by the proposed algorithm match the actual leaks after a predefined time
In addition, the control signals
The information supplied by the predefined-time leak estimation algorithm enhances the control performance and facilitates the activation of necessary warnings to signal the presence of leaks. This capability is crucial for maintaining the system’s reliability and preventing failures due to undetected disturbances.
Noisy case
Measurement noise is a common consideration in applications of this nature. For example, in a cylindrical tank with a fluid volume given by
To mitigate the effect of noise on the estimation process, the discontinuous function
In the simulation study of the noisy case, a measurement noise magnitude of
The simulation results illustrated in Figure 4 demonstrate that both
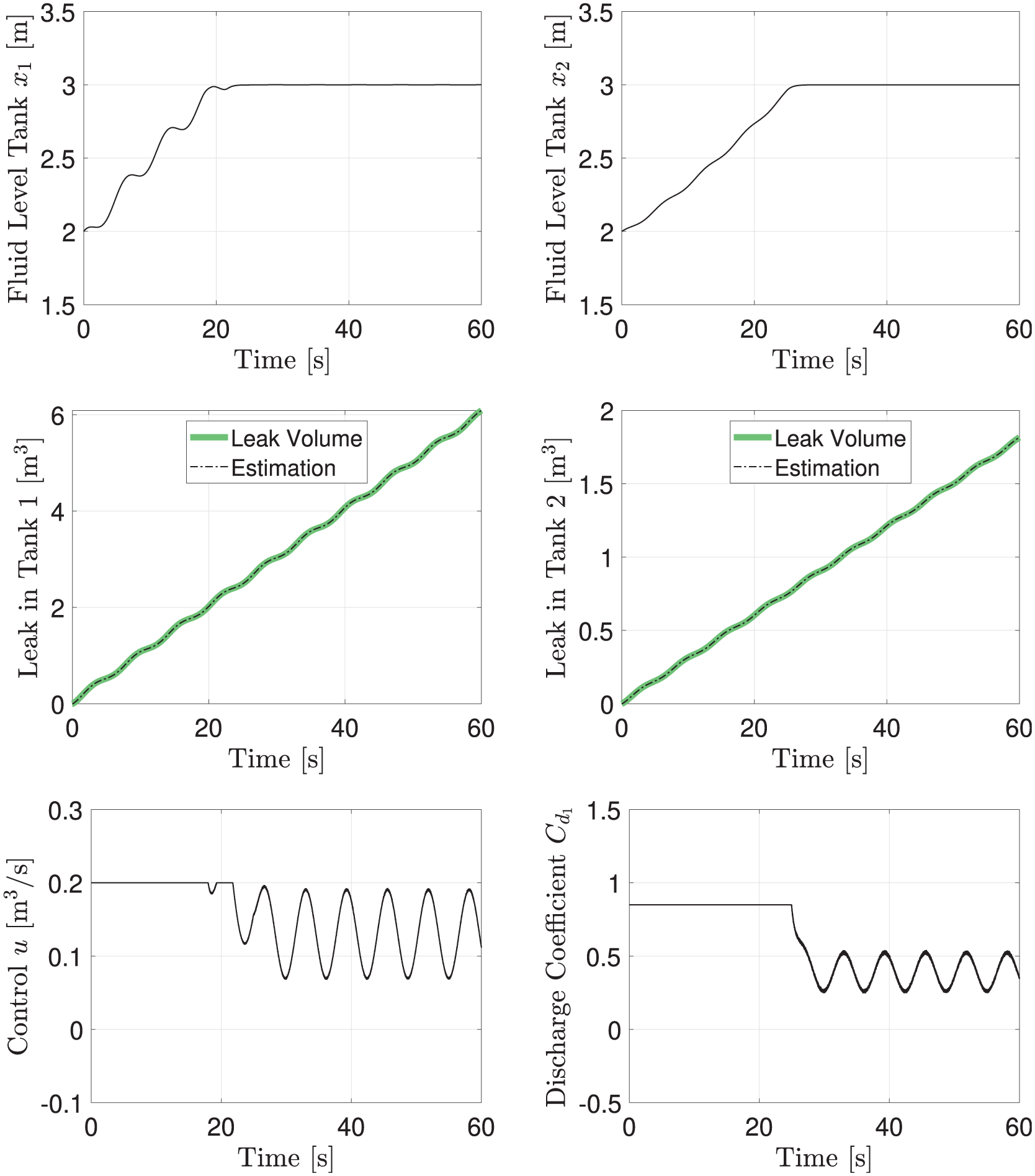
Noisy case: Predefined-time leak-flow estimation.
Moreover, as shown in Figure 4, the estimated leak volumes matched the actual leak-flows after the predefined time
Finally, Figure 5 provides a detailed view of the leak-flow estimate. Although the estimation is highly accurate in the noise-free case, noise introduces high-frequency components. However, signals
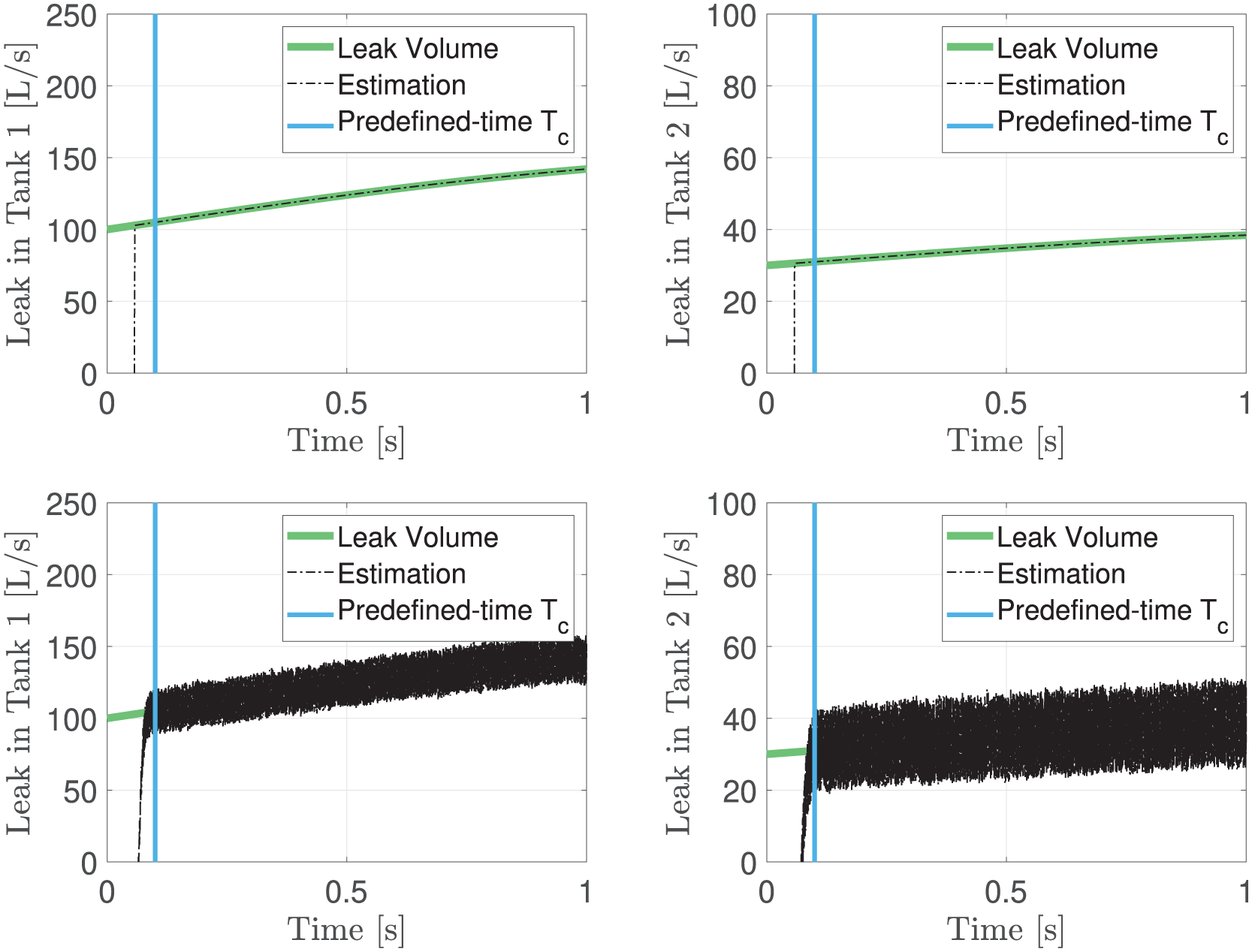
leak-flow estimation in noise-free and noisy cases.
For industrial valves, safe commutation frequencies may vary depending on the actuator type due to mechanical and thermal limitations. For example, some specialized solenoid valves can safely handle commutation frequencies above 100 Hz, 45 making them suitable for high-frequency applications. Pneumatic valves can also operate safely at similar frequencies; however, their operation is constrained by pneumatic dynamics, resulting in slower responses. In contrast, motorized valves can be even slower, with recommended lower frequencies, as higher rates can lead to overheating and gear wear. Depending on the type of valve used, the scheme must include an appropriate filtering stage to compensate for the fluid leakage detected through the control signal.
Comparison with high-gain estimation scheme
The high-gain proportional-integral estimation scheme proposed by 46 provides a comparative basis. This scheme is defined as

where

To simplify the analysis, we let

This formulation ensures that

indicating that
The high gain parameter was set to
These indices were used for comparative analysis in noisy conditions.
The comparative results for predefined time and high-gain estimation schemes in the presence of noise are summarized in Table 2. Both schemes were evaluated using the same controller to isolate the performance of the leak-flow estimation algorithm.
Comparison of performance indices for predefined-time and high-gain estimation schemes under noisy conditions.

The results in Table 2 reveal that high-gain schemes suffer from a significant disadvantage during the transient phase, mainly due to the peaking phenomenon. This effect results in considerably higher values for the ISE index compared to the predefined time scheme. However, both schemes demonstrated comparable performance during the steady-state phase, with the predefined time scheme exhibiting slightly better results. Furthermore, it is worth noting that the high-gain scheme could provide more accurate estimations during the steady-state period in the absence of noise owing to its inherently smoother linear structure. However, the peaking effect would still negatively impact the transient behavior. From a practical perspective, measurement noise is inevitable in this class of applications, further highlighting the robustness of the predefined time scheme in noisy environments. In addition to the above discussion, high-gain or alternative schemes do not guarantee the existence of a known and directly adjustable time at which the estimator accurately converges to the leakage flow function.
It is worth mentioning that, in the presence of noise or high-frequency components, using the high-gain estimation scheme would pose additional challenges, as the high gain would amplify these effects and induce peaking phenomena, which constitutes another motivation to consider new approaches. In the particular case of the proposed approach, the predefined-time estimation suggests a suitable time after the observer convergence to compensate for system leaks.
Conclusions
This paper proposes a robust control strategy for coupled tank systems in a gravity-fed cascade configuration, utilizing a predefined robust time estimate of leak flows. This methodology ensures that leaks are detected and estimated within a predefined time, providing robust performance even in the presence of disturbances. Furthermore, the proposed strategy facilitates regular system operation by compensating for estimated leak flows, thereby enhancing the reliability and autonomy of the control process. The results demonstrate that the predefined time estimation algorithm not only accurately identifies leaks but also significantly improves the control performance of the coupled tank system. This prominent feature is particularly evident under noisy measurement conditions, where the proposed method exhibits strong robustness. The predefined time estimation approach provides a high degree of certainty in detecting and addressing leaks on time, thereby mitigating potential problems and ensuring process continuity. Simulation studies validated the effectiveness of the proposed methodology, highlighting its ability to handle measurement noise and its superior performance compared to high-gain estimation schemes. The findings underscore the practical applicability of the predefined time-control approach in industrial scenarios where reliable and timely responses are critical.
Footnotes
Ethical considerations
Ethical approval was not required for this study as it involves theoretical analysis and computer simulations and did not involve human or animal participants.
Author contributions
Torres-Ruvalcaba: analysis, design, and numerical simulation. Muñoz-Vázquez: methodology, conceptualization, original draft preparation, and supervision. Sánchez-Torres: methodology, original draft preparation, and supervision. Fernández-Anaya: analysis and supervision. All authors have read and approved the final version of the manuscript.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.