
Abstract
This article studies the design problem of fault-tolerant and disturbance rejection control for leader-following multi-agent systems with polynomial form fault. First, a novel observer is designed to estimate polynomial form faults and external disturbances in the tracker. Second, a fault-tolerant control protocol is designed for each follower based on the obtained estimates; the designed distributed controller can effectively achieve both the goal of fault-tolerant control and the effect of disturbance rejection. Finally, a simulation result of a practical example is presented to verify the feasibility of the proposed scheme.
Introduction
In the past couple of decades, the consensus control problem of multi-agent systems (MASs) has received extensive attention.1–9 The consensus control method of MASs has been widely used in biology, physics, and engineering and other related disciplines, such as the attitude alignment of satellites, the collaborative control of unmanned aircraft, and the analysis of animal aggregation behavior.10–17 However, the problems of actuator fault and external disturbance cannot be avoided during the operation of the system. Once the above problems occur, the entire mission may fail. Therefore, in this article, the problems of the disturbance rejection performance and fault-tolerant control (FTC) for MASs have become research hotspots.
FTC problems can be roughly divided into two categories according to different design ideas: passive FTC18,19 and active FTC.20,21 In passive FTC, the controller has fixed parameters and structure, the controller is designed for a specific type of fault, and it does not need to detect the fault information online. In active FTC, there are components that can detect and identify faults automatically, and actively react to failures by reconfiguring control actions. Wang et al. 22 studied the problem of fully distributed inclusion control for MASs with dual integrator dynamics-directed topology. Gong et al. 23 investigated the problem of fault-tolerant consistency control for non-homogeneous nonlinear fractional multi-intelligent body systems with general-directed topology. Yadegar and Meskin 24 proposed an adaptive FTC scheme based on a virtual actuator framework, which takes into account the time-varying additive actuator failures in nonlinear heterogeneous multi-agent systems (HMASs).
On the other hand, in the actual project operation, the external disturbances have different degrees of influence on the performance of the whole system, which will further increase the management complexity of the whole system and also affect the stability of the whole system, and even lead to the failure of the whole project operation. The method to deal with such problems is to construct a disturbance estimation observer to estimate the disturbance, and then design the corresponding controller based on some estimated values obtained from the observer, so as to produce suppression of external disturbances. Han et al.’s 25 control method based on disturbance observer estimates the disturbance of external system and deals with the control problem of MASs with external disturbance. Pei 26 studied the consensus tracking problem for HMASs with interference and directed graphs. Wang et al. 27 developed an interference observer-based method to estimate the interference generated by external systems.
Guided by the research described above, in this article, we consider design problem of fault-tolerant and disturbance rejection control for leader-following MASs with fault in polynomial form. The main contributions of this article are generalized as follows: (1) a neoteric observer is designed to get estimations of faults and disturbances in followers. To be more general, faults which are in followers can be represented as a polynomial function of time and assume that the unknown perturbation is a harmonic perturbation. (2) Each follower is designed with an FTC protocol according to the obtained estimates. The designed distributed controller can not only effectively accomplish the goal of FTC, but also effectively suppress the influence of disturbance.
The rest of this article is arranged as follows: In section “Preliminaries and problem formulation,” some necessary basic knowledge is stated and the research question is elaborated. In section “Main results,” the main design approach and results are presented. In section “Simulation results,” a simulation result of a practical example is presented to verify the feasibility of the proposed scheme. Finally, the conclusions are given in section “Conclusion.”
Notations
Preliminaries and problem formulation
Graph theory
Consider a network consisting of
System description
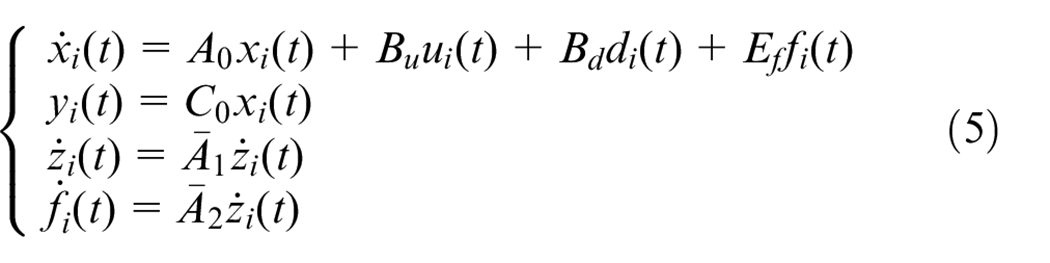
Consider the following MASs. The dynamic behavior of the leader is as follows

and the dynamic behavior of the

where
In this article, the fault

where
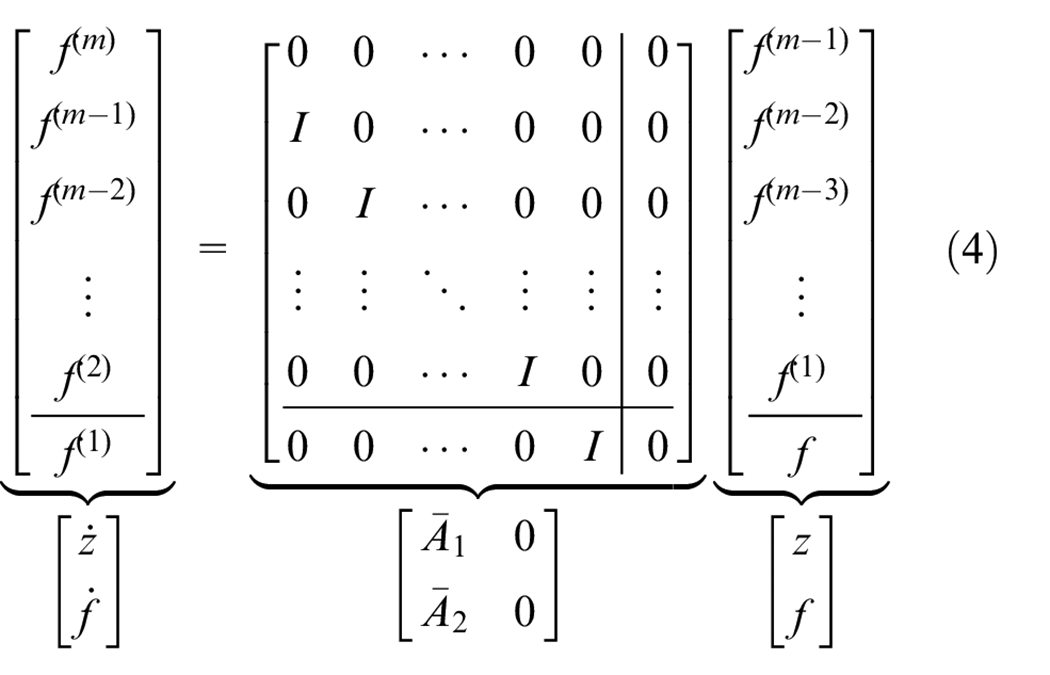
From equation (4), equation (2) can be reformulated as follows
The unknown external interference

where
Assumption 1
The undirected topology graph
Assumption 2
Assumption 3
Rank
Remark 1
The faults considered in this article are time-varying polynomial faults. In practical systems, external disturbances are unavoidable, so we also introduce disturbances in the system modeling process. Usually, the system may have both faults and external disturbances, so in the next part, we will design observers to observe faults and disturbances simultaneously.
Main results
In this part, the problem of fault-tolerant consensus for system (2) with disturbance and polynomial fault will be researched. First, the design method of the observer will be given, and then based on each estimate obtained, a distributed fault-tolerant controller will be designed to achieve the consistency of the leader-follower.
Estimation observer design
The leader is defined to be fault-free, so the design of the observer is only for each follower. Consider the following fault estimation observer for system (2)
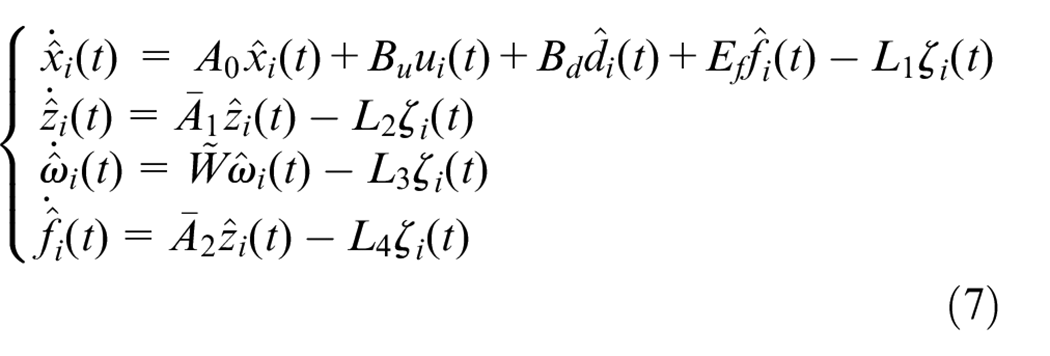
where
where
According to the estimate of the
Let augmented estimation error
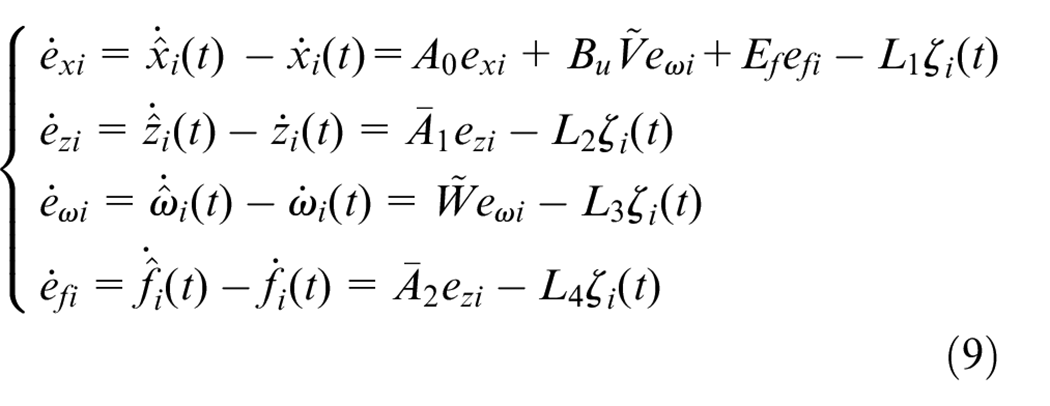
Further summarized and sorted out
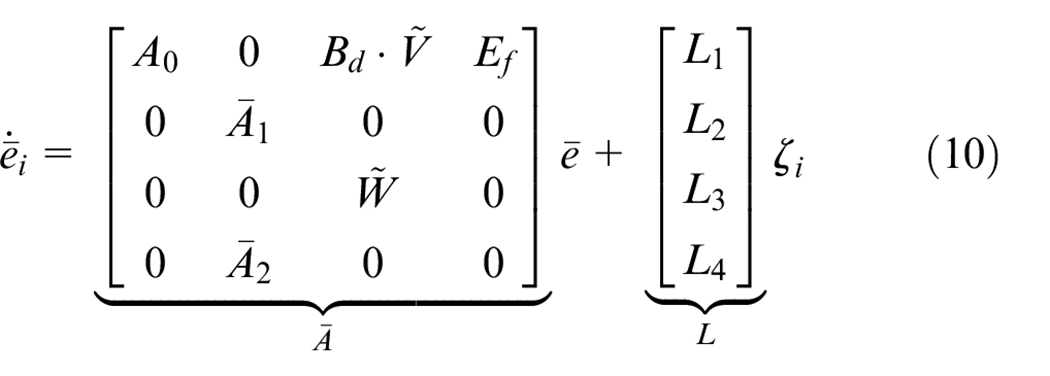
Therefore, the augmented error system is as follows

Define

where
As of now, the global estimation error system can be obtained. The sufficient condition to ensure the convergence of system (12) will be given in the following sections.
Theorem 1
Consider MASs (1) and (2) under the conditions of Assumption 1, if a positive definite matrix
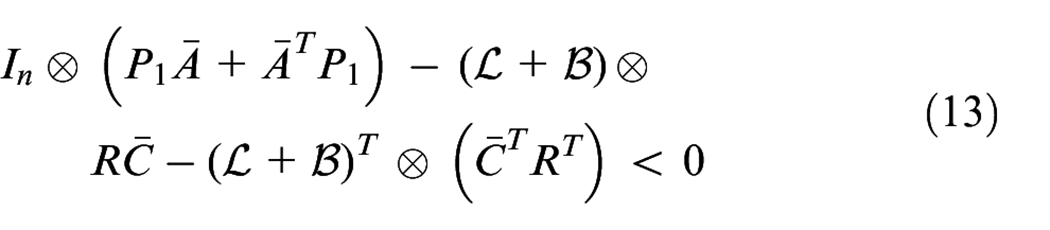
where
Then system (12) with fault estimation observer is asymptotically stable.
Proof
Consider the Lyapunov function as follows

The derivative of the above function
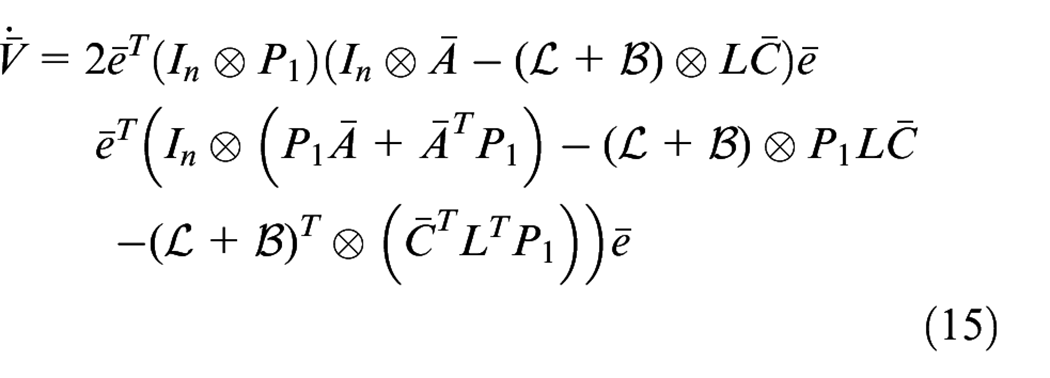
According to equation (13), one can obtain
Remark 2
In this section, an observer is designed, which is used to estimate faults and interference simultaneously. At the next stage, a control protocol will be designed in order that can guarantee the stability of the system when faults and disturbances exist simultaneously.
Fault-tolerant controller design
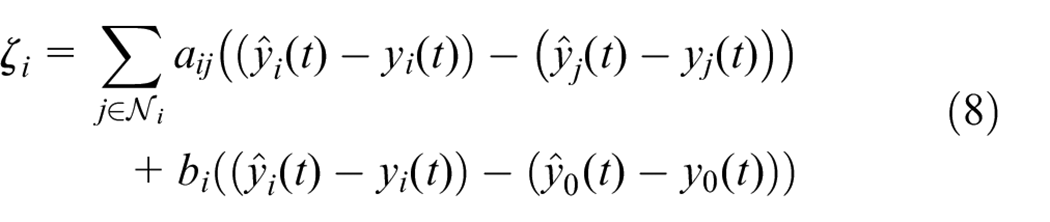
The control protocol will be introduced in this section. The relative output information among the neighbors of the

Assumption 3 shows that

Since the fault observer of the design can estimate the disturbance and fault at the same time, the FTC law based on the fault observer is as follows

where
Substituting equation (18) into equation (2) yields
Define

Let

Combining equations (12) and (21)

where
Next, sufficient conditions for the leader equation (1) and the follower equation (2) in a MASs to reach consensus will be given.
Theorem 2
Considering MASs (1) and (2) under the condition of FTC protocol equation (18), if there are positive definite matrices

where
Then the closed-loop system (22) is stable.
Proof
Let

The derivative of the above function
where
According to equation (24), one can obtain
Simulation results
In this section, an aircraft model in the work by Yang et al. 29 will be used to demonstrate the feasibility of the scheme described in this article; this aircraft model consists of one leader and four followers. The parameters are given as follows
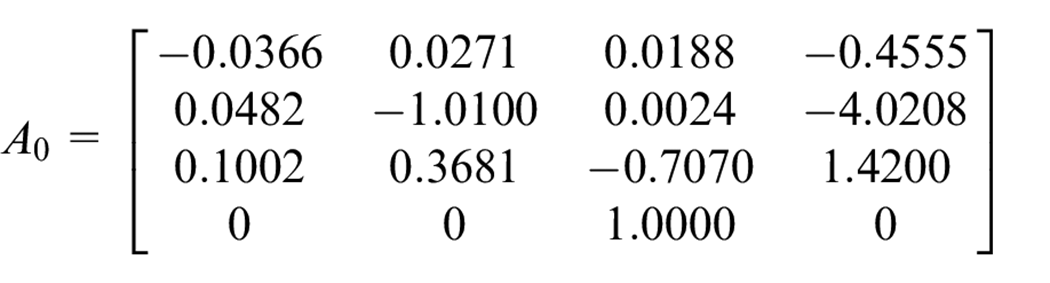
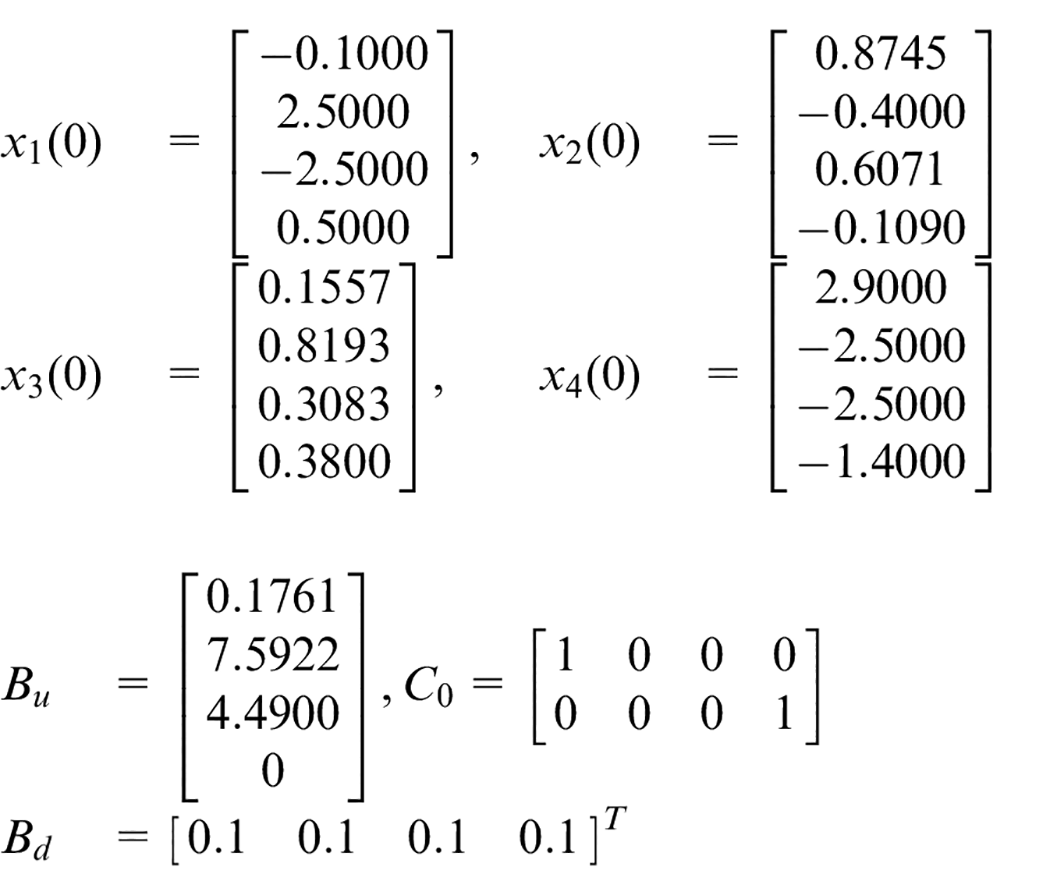
where
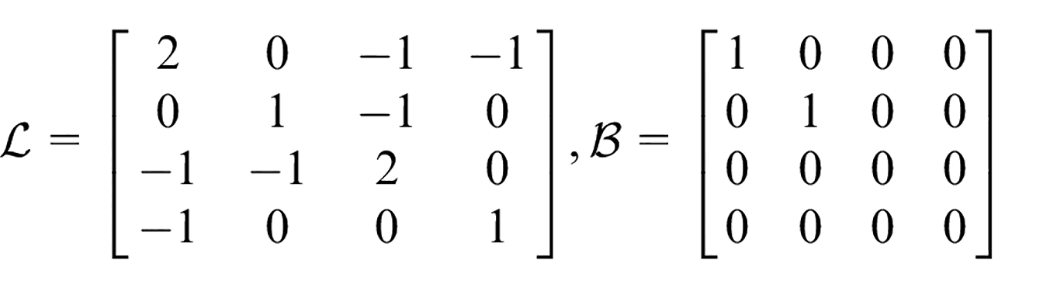
The interconnection topology of the aircraft is displayed in Figure 1; from this figure, the Laplacian matrix
To verify the stability of the system under external disturbances,
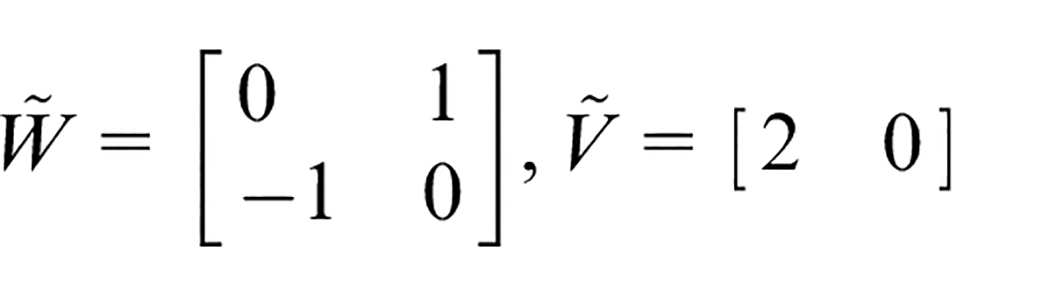
We assume that the fault distribution matrix satisfies

where
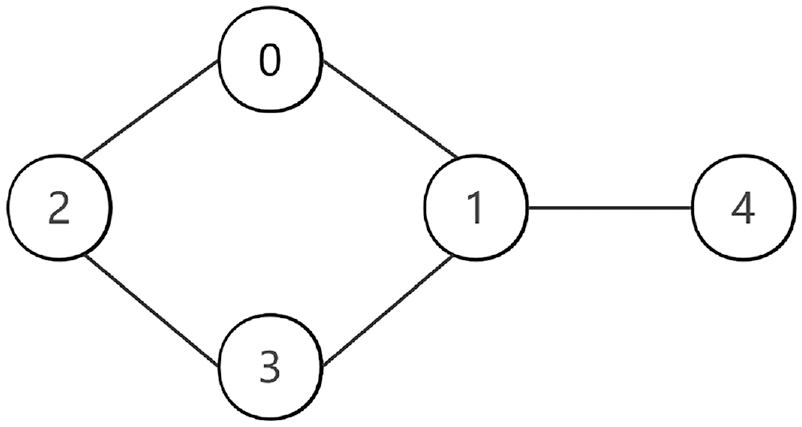
Interconnection topology.
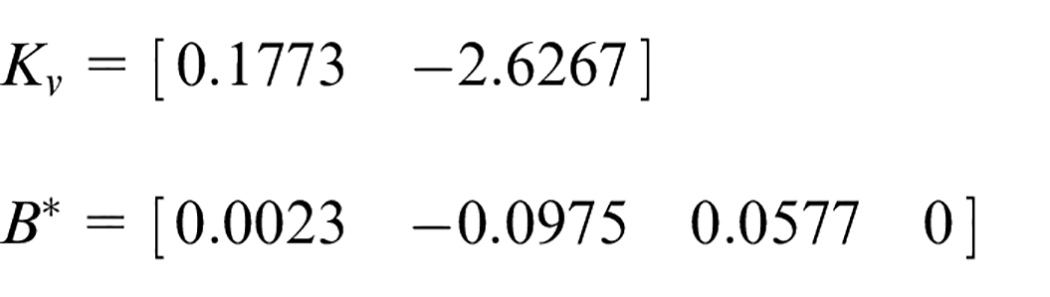
The gain matrix of the observer can be obtained from Theorem 1 as follows
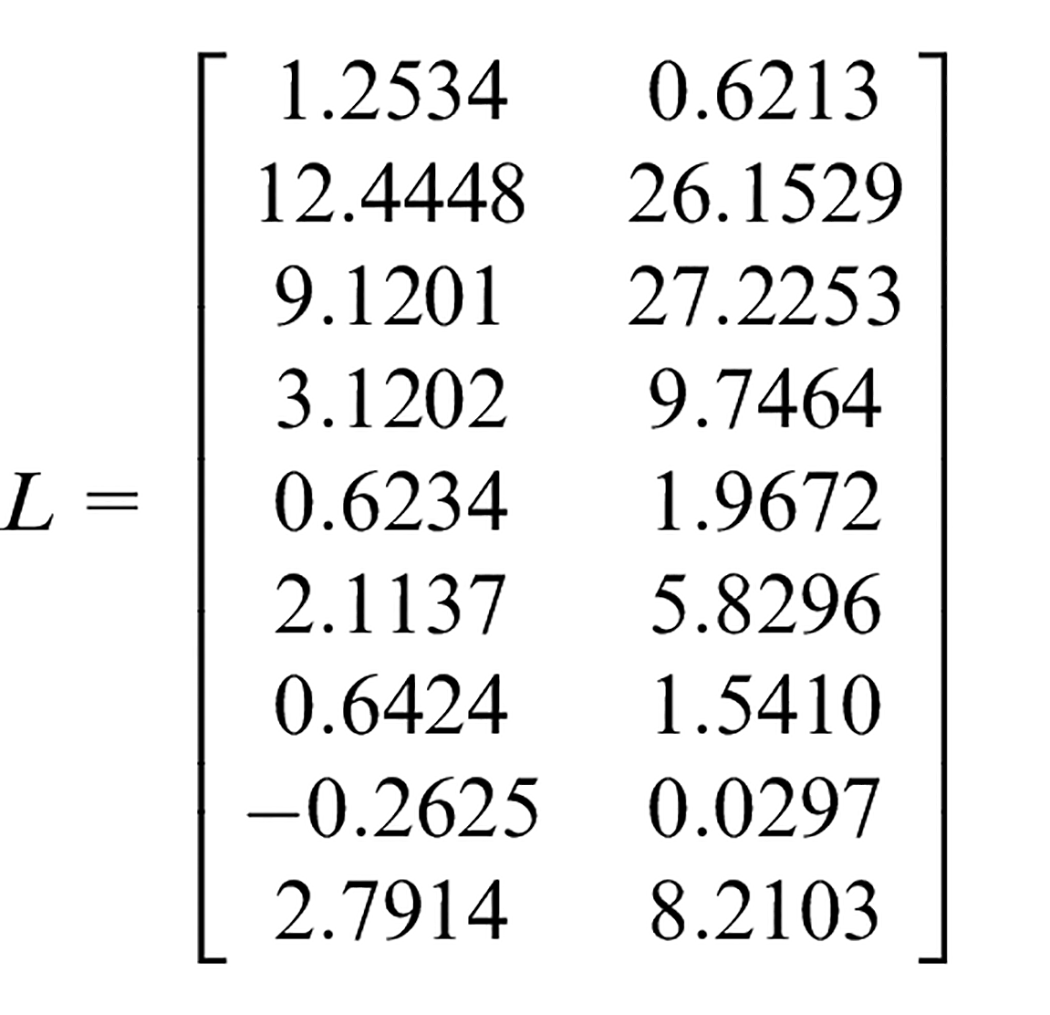
We can get
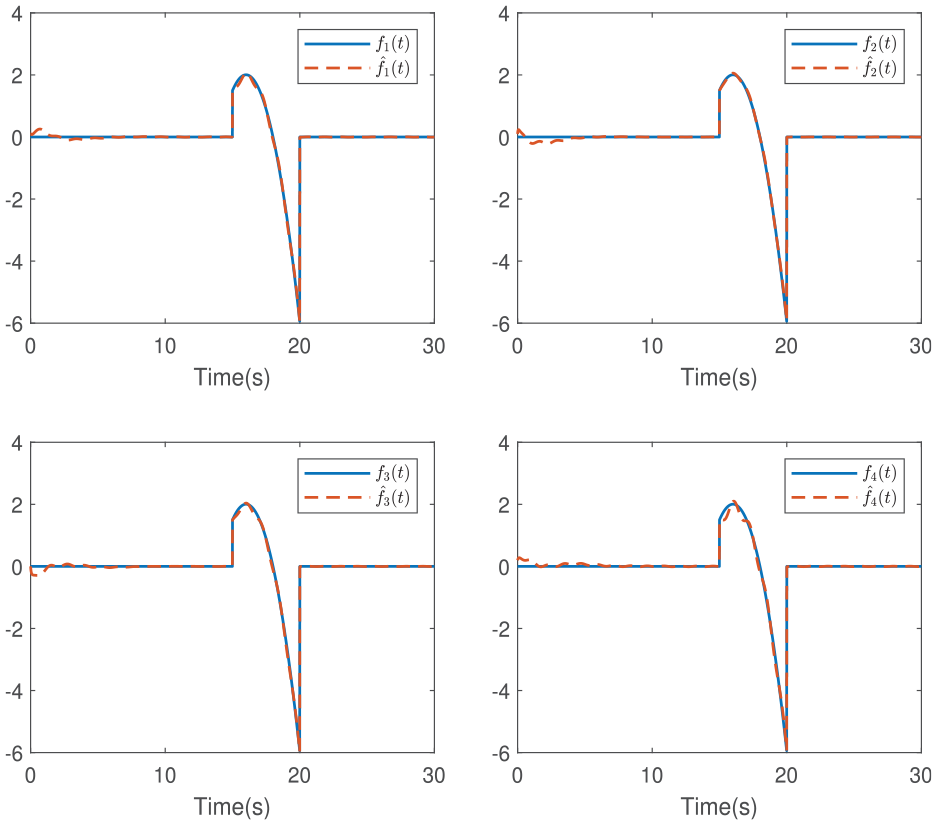
Fault and its estimation.
Assuming that the
The tracking errors of followers 1, 2, 3 and 4 are shown in Figure 4. We can clearly see that the tracking error of each follower converges to zero in a short time, so it can be seen that followers 1–4 can track the leader and maintain consistency in a short time. Therefore, the fault-tolerant controller designed in this article has good performance for synchronous FTC and disturbance rejection in MASs with polynomial fault, thus also proves the effectiveness of the scheme.
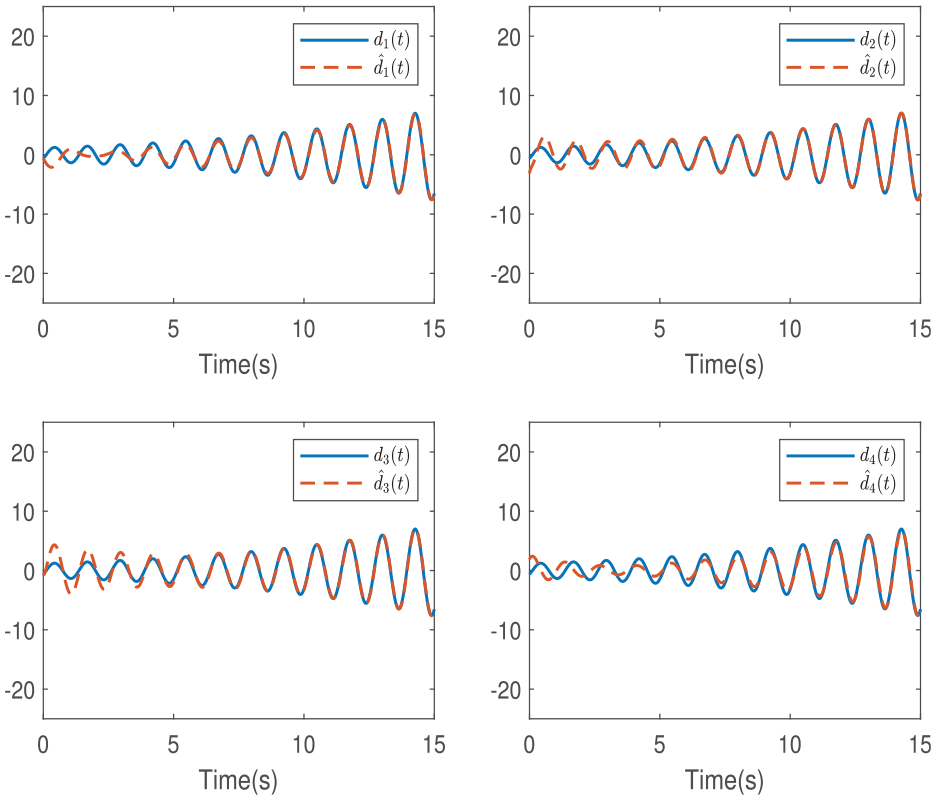
Disturbance and its estimation.
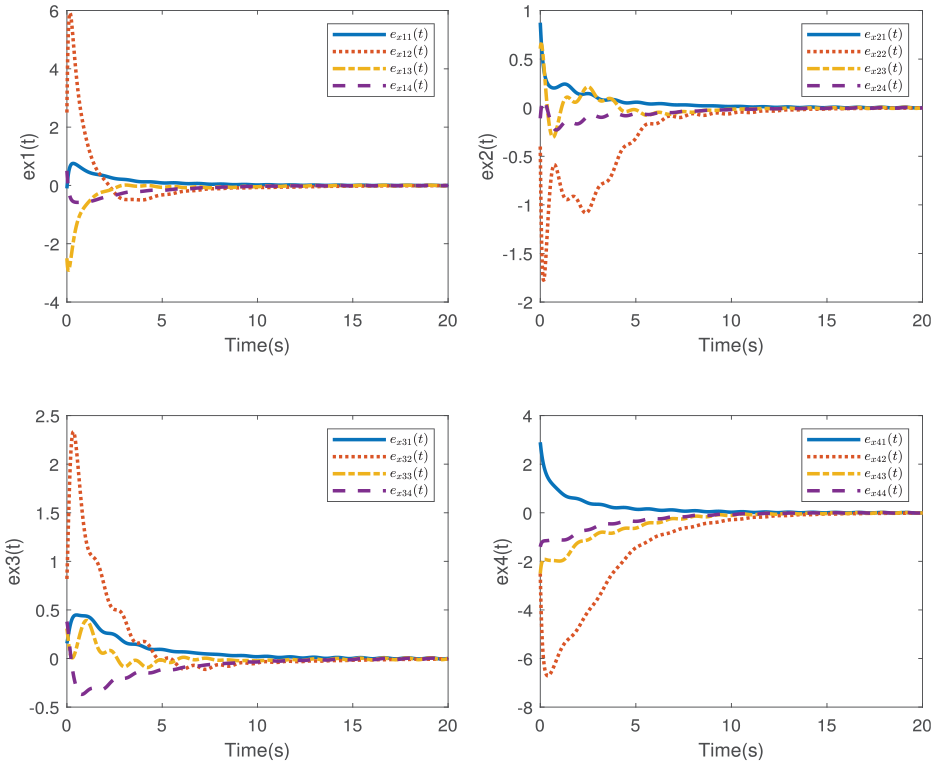
Tracking error with control protocol in followers 1–4.
Conclusion
In this article, the design problem of fault-tolerant and disturbance rejection control is investigated for leader-following MASs with fault in polynomial form. First, a novel observer is designed to get estimations of faults and disturbances in followers. To be more general, faults which are in followers can be expressed as polynomial function with respect to time. Then, based on the estimations of disturbance and fault, the control protocol has been designed. FTC problem is solved by analyzing the stability of the closed-loop system. Finally, a numerical example of an aircraft is given to verify the effectiveness of the proposed method. In the future work, the fault-tolerant consensus problem of MASs with both fault and disturbance under reduced order observer will be considered.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Taishan Scholar Program of Shandong Province, the Natural Science Foundation Program of Shandong Province under grant no. ZR2019YQ28, the Development Plan of Youth Innovation Team of University in Shandong Province under grant no. 2019KJN007, and the National Natural Science Foundation of China under grant nos 61773193 and 62103177.