
Abstract
The genetic algorithm (GA) is capable of optimizing hydro-pneumatic suspension parameters based on multiple vehicle performance indices, thereby improving ride comfort. However, the conventional genetic algorithm can only perform continuous searches within a predefined numerical range, and the optimized parameters may not be consistent with practical constraints. To address this limitation, this study proposes a discrete constrained genetic algorithm (DCGA), which restricts optimization to a set of discrete candidate values. This approach ensures both the practicality of the optimized throttle valve orifice and the enhancement of ride comfort. In this work, the suspension system is simplified into a spring–damper model, and a one-fourth hydro-pneumatic suspension numerical model is developed in MATLAB–Simulink. The effects of suspension parameters on stiffness and damping characteristics are analyzed. Vertical acceleration signals of the unsprung mass under different road conditions are obtained using a tri-axial accelerometer. These signals are filtered with a bandwidth filter to suppress high-frequency noise and low-frequency drift, and subsequently integrated to derive vertical displacement and velocity, which are used as input for the unsprung mass. The proposed DCGA was employed to determine the optimal throttle valve orifice from a set of discrete candidate values, using the root mean square (RMS) values of vehicle body vertical displacement, vertical acceleration, and suspension dynamic deflection as performance evaluation metrics. Simulation results indicate that, under the discrete bump road condition, the optimized orifice reduces the RMS values of vehicle body vertical displacement, vertical acceleration, and suspension dynamic deflection by 41.6%, 65.3%, and 65.5%, respectively, compared with the initial throttle valve orifice. Under the random road condition, the corresponding reductions are 5.8%, 52.8%, and 82.2%, respectively.
Keywords
Introduction
The suspension system is a critical component of vehicles, providing support for the body and mitigating vibrations. Most vehicles, however, employ passive suspensions, in which stiffness and damping are fixed and cannot adapt to diverse and complex road conditions.1,2 In contrast, hydro-pneumatic suspensions, characterized by their nonlinear stiffness and damping properties,3–5 are widely applied in off-road and heavy-duty vehicles to enhance ride comfort.
Extensive research has been conducted on hydro-pneumatic suspensions through mathematical modeling, focusing on their stiffness and damping behaviors. Zhu et al. 6 developed a quarter-car equilibrium model and investigated the damping characteristics under different orifice configurations. Zheng et al. 7 derived nonlinear expressions for stiffness and damping, established a full three-dimensional multibody dynamic model of a wheeled tractor suspension, and analyzed the influence of accumulator volume, initial pressure, and throttle valve orifice size on vibration performance. Tan et al. 8 integrated suspension parameter design with characteristic equations and the power spectral density method to optimize ride comfort for patients in ambulances while maintaining handling stability. Yin et al. 9 modeled stiffness and damping characteristics, calibrated them using mining truck data, and determined the accumulator’s initial pressure and throttle valve diameter.
Overall, the accumulator’s initial pressure and volume, along with throttle valve orifice size, are critical design parameters. To optimize these, researchers have increasingly turned to intelligent algorithms. Yang et al. 10 applied an improved NSGA-II algorithm to optimize hydro-pneumatic suspension parameters for high-clearance sprayers, verified by simulation and vibration tests, achieving improvements of 19.4%, 10.7%, and 4.0% in vibration reduction indices. Nie et al. 11 built an equivalent mathematical model of a laterally interconnected ISD suspension and a 15-DOF vehicle model in AMESim, optimizing parameters via a genetic algorithm. Yang et al. 12 introduced a hydro-pneumatic suspension optimization framework for high-clearance self-propelled sprayers based on an improved MOPSO algorithm, demonstrating superior vibration reduction performance. Shen et al. 13 employed the Non-dominated Sorting Genetic Algorithm II (NSGA-II) to optimize the key parameters of a hydro-pneumatic suspension system. Using the conventional DHPS S0 suspension as a benchmark, simulation results demonstrated that the hydro-pneumatic suspension with optimized parameters can significantly improve the vehicle's ride comfort performance
Nevertheless, conventional intelligent algorithms typically conduct continuous searches within predefined ranges,14–18 and the resulting parameters may lack practical feasibility. To overcome this limitation, this study proposes the DCGA, which, without altering the initial pressure or volume of the accumulator, minimizes body vertical displacement, vertical acceleration, and suspension dynamic deflection by selecting optimal values from a discrete set of throttle valve orifices. This approach enhances ride comfort while ensuring that the optimized orifice sizes are realistic.
The remainder of this paper is structured as follows: Section 2 formulates the one-fourth hydro-pneumatic suspension numerical model by simplifying the suspension into a spring–damper system and analyzing its stiffness and damping characteristics. Section 3 introduces the working principle of the proposed DCGA. Section 4 presents simulations of the one-fourth model under discrete bump road condition and random road conditions in MATLAB–Simulink, comparing performance indices with both initial and optimized throttle valve orifices. Finally, Section 5 summarizes the main conclusions of this study, discusses the limitations, and outlines directions for future work.
Numerical modeling of hydro-pneumatic suspension
Quarter-car hydro-pneumatic suspension modeling
As illustrated in Figure 1, the suspension system is simplified into a spring–damper configuration. The end adjacent to the rodless chamber of the hydraulic cylinder is connected to the vehicle body, while the opposite end is attached to the lower control arm. The suspension spring is arranged in parallel with the hydraulic cylinder to form the basic structure. The vehicle employs a hydro-pneumatic suspension system. Its operating principle can be described as follows: during the compression stroke of the hydraulic cylinder, hydraulic fluid is discharged from the rodless chamber and flows through check valve I and throttle valve II into the rod chamber. Simultaneously, fluid from the accumulator is supplied to the rod chamber. During the extension stroke, hydraulic fluid exits from the rod chamber; a portion of the fluid flows into the accumulator, while the remainder passes through check valve I and throttle valve II back into the rod chamber.
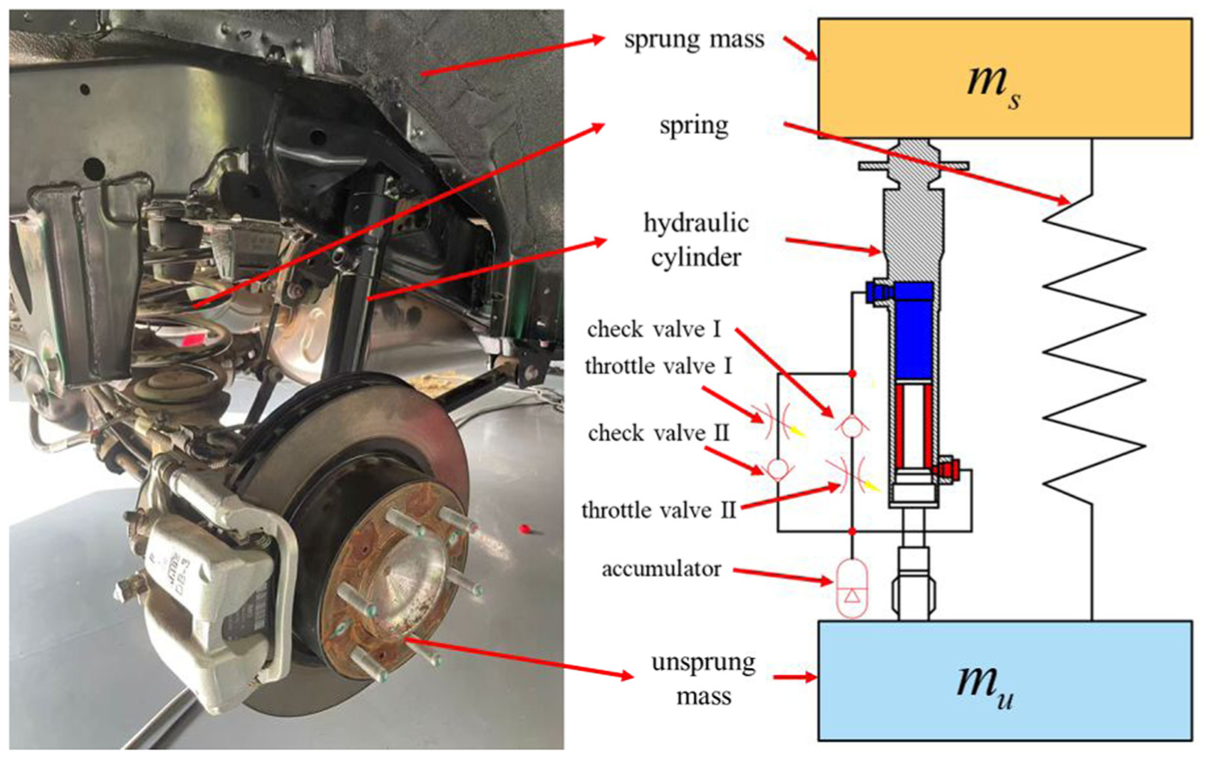
Schematic of the one-fourth vehicle suspension system.
Direct measurement of road roughness and tire mechanical properties during vehicle operation is challenging. To address this, a tri-axial accelerometer was mounted on the unsprung mass to capture its vertical acceleration responses under various driving conditions. Therefore, based on Newton’s second law, the vertical dynamic equations of the quarter-car suspension model can be expressed as follows:

where
Investigation of the stiffness properties of hydro-pneumatic suspension
The stiffness of the suspension is primarily provided by the spring and the accumulator. Since the suspension spring is arranged in parallel with the hydraulic cylinder, the equivalent stiffness of the suspension can be expressed as:

Where
The vehicle employs a cylindrical helical spring as the damping element, whose stiffness can be determined using equation (3).

where
In the bladder-type accumulator, nitrogen is employed as the charging gas. By assuming that the gas follows the ideal gas law and the hydraulic fluid is incompressible, the elastic force of the hydro-pneumatic spring can be formulated as:

where
By differentiating equation (4) with respect to the suspension stroke, the analytical expression for the stiffness of the hydro-pneumatic spring can be derived as:

As indicated by equation (5), both the initial pressure and the initial volume of the accumulator influence the stiffness of the hydro-pneumatic spring. With the initial volume held constant, the initial pressure was set to 3, 4, and 5 MPa, respectively, to investigate its effect on suspension stiffness. As illustrated in Figure 2, the suspension stiffness exhibits a clear upward trend with increasing initial accumulator pressure.
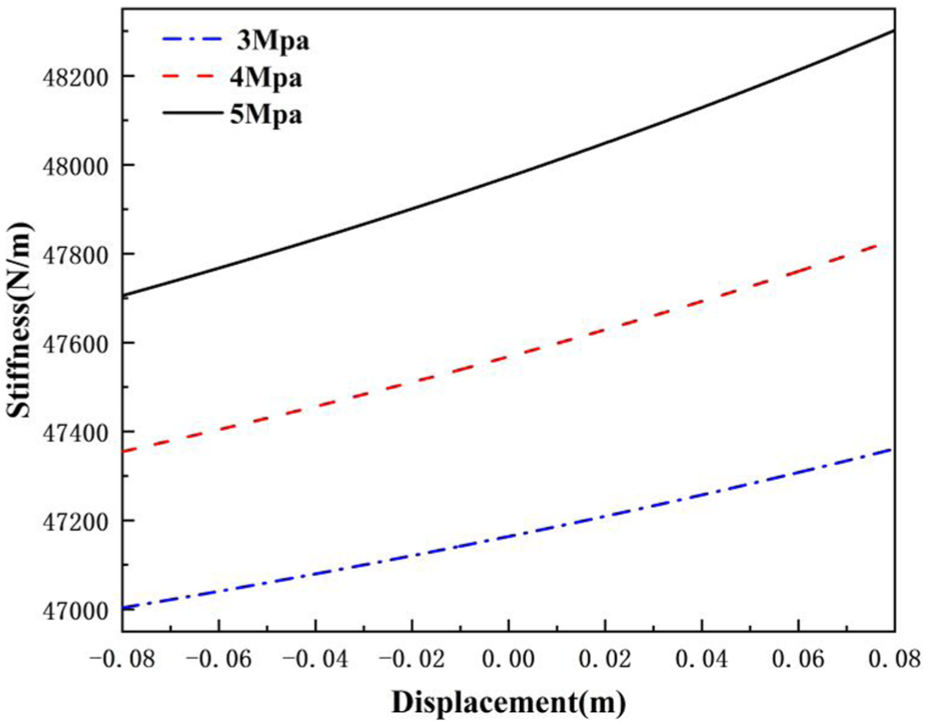
Stiffness property of the hydro-pneumatic suspension.
Damping characteristics of hydro-pneumatic suspension
The primary role of damping is to attenuate vibrations induced within the suspension system. In general, the damping force of a suspension system arises from three sources: fluid flow through the orifice and check valve; friction generated during piston motion in the hydraulic cylinder; and pressure losses occurring during fluid flow through pipelines or valve blocks. In this study, emphasis is placed on the damping force produced by fluid passing through the orifice and check valve. The governing equation for the damping force of the hydro-pneumatic suspension is given in equation (6).
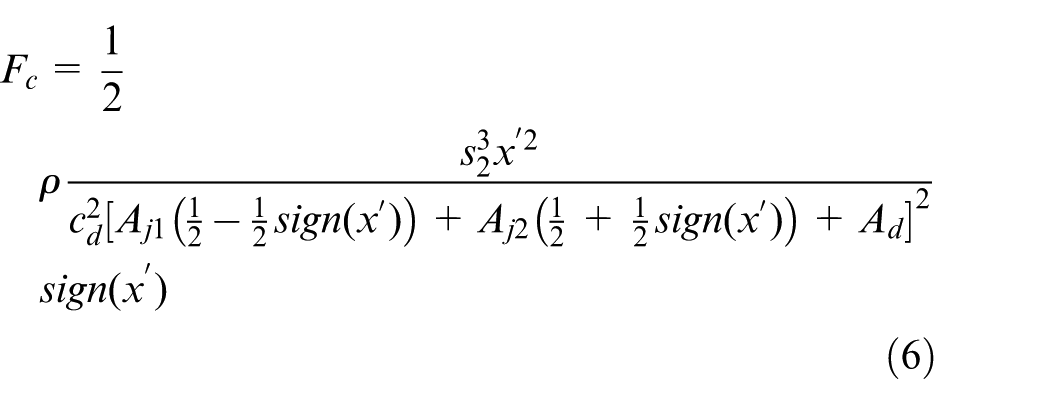
where
By differentiating equation (6) with respect to the suspension velocity, the expression for the damping coefficient of the hydro-pneumatic suspension can be obtained:
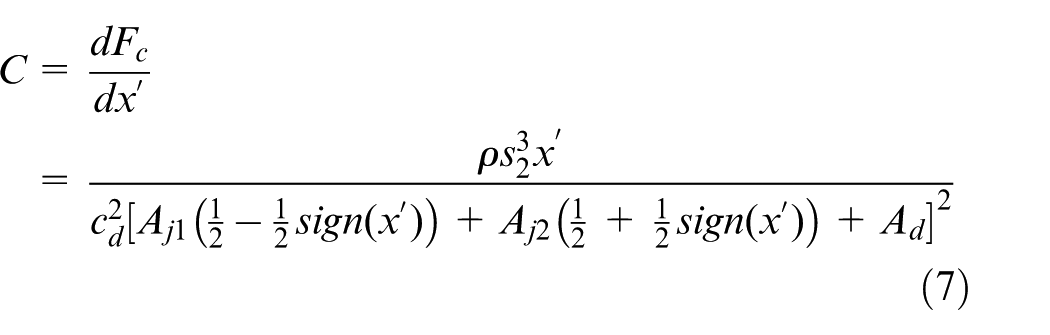
Equation (7) reveals that the diameter of the throttle valve has a direct influence on the damping force generated by the hydro-pneumatic suspension. In this study, the diameter of throttle valve II is held constant while the diameter of throttle valve I is varied. A sinusoidal excitation signal with an amplitude of 40 mm is applied as the displacement input. As illustrated in Figure 3, the damping force produced by the hydro-pneumatic suspension increases with the reduction in the diameter.
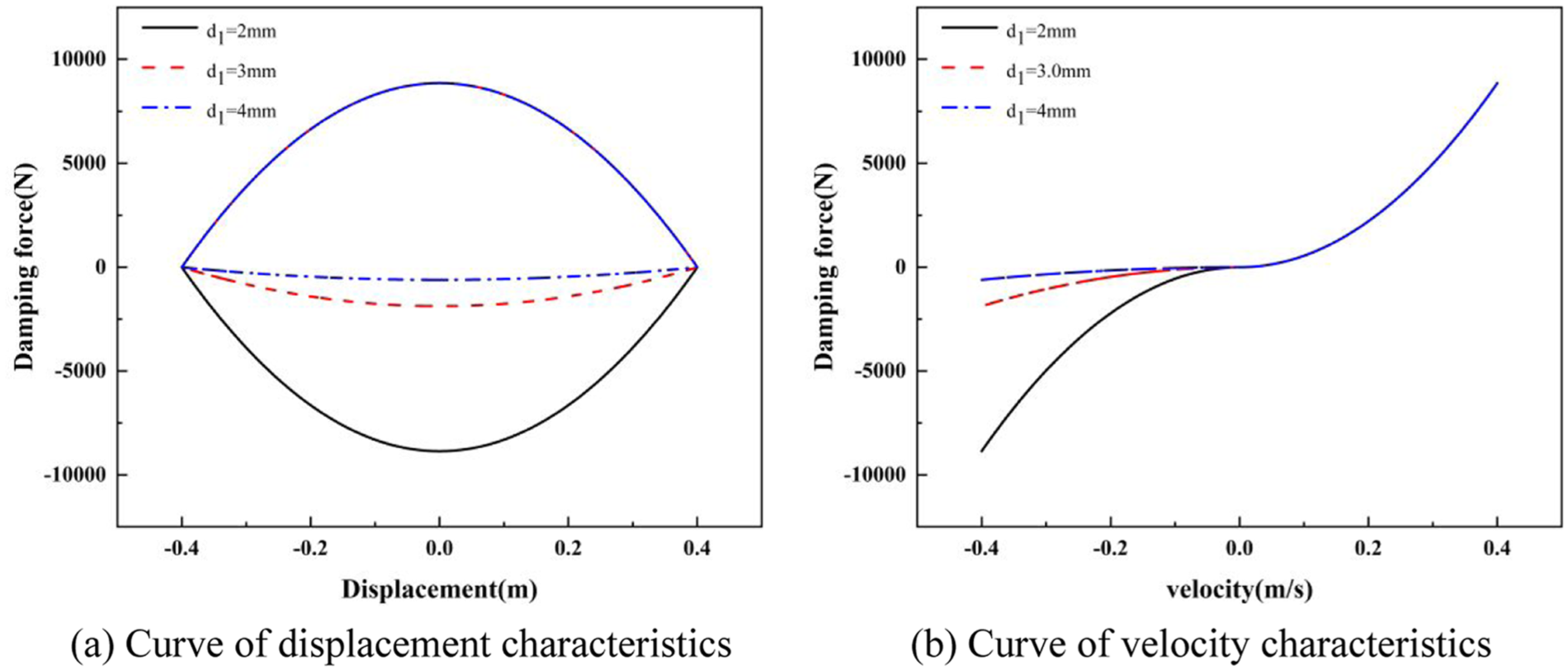
Damping property of the hydro-pneumatic suspension: (a) curve of displacement characteristics and (b) curve of velocity characteristics.
The discrete constrained genetic algorithm
To enhance vehicle ride comfort, a genetic optimization algorithm is employed in this study to determine the appropriate throttle valve orifice size. The genetic algorithm (GA) is a global optimization method based on probabilistic search principles, widely applied due to its simplicity, broad adaptability, and strong robustness. Its mechanism mimics the process of natural selection in biological systems. However, conventional GAs perform continuous searches within predefined ranges, and the resulting throttle valve orifice sizes may not be practically feasible. To address this limitation, the DCGA is proposed, in which the integer codes generated by the GA are mapped to actual throttle valve orifice values restricted to a discrete set. The basic procedure of the DCGA is as follows: (i) define a discrete set of throttle valve diameters, encode the variable (throttle valve diameter), and generate an initial population randomly; (ii) assign each individual in the population to a throttle valve diameter and evaluate its fitness value according to equation (8); (iii) perform genetic operations—selection, crossover, and mutation—to retain high-fitness individuals, produce new candidates, and iteratively update the population; (iv) recalculate the fitness values and assess whether the termination condition is satisfied. Once the condition is met, the optimization process is complete. The overall flow of the proposed DCGA is illustrated in Figure 4.
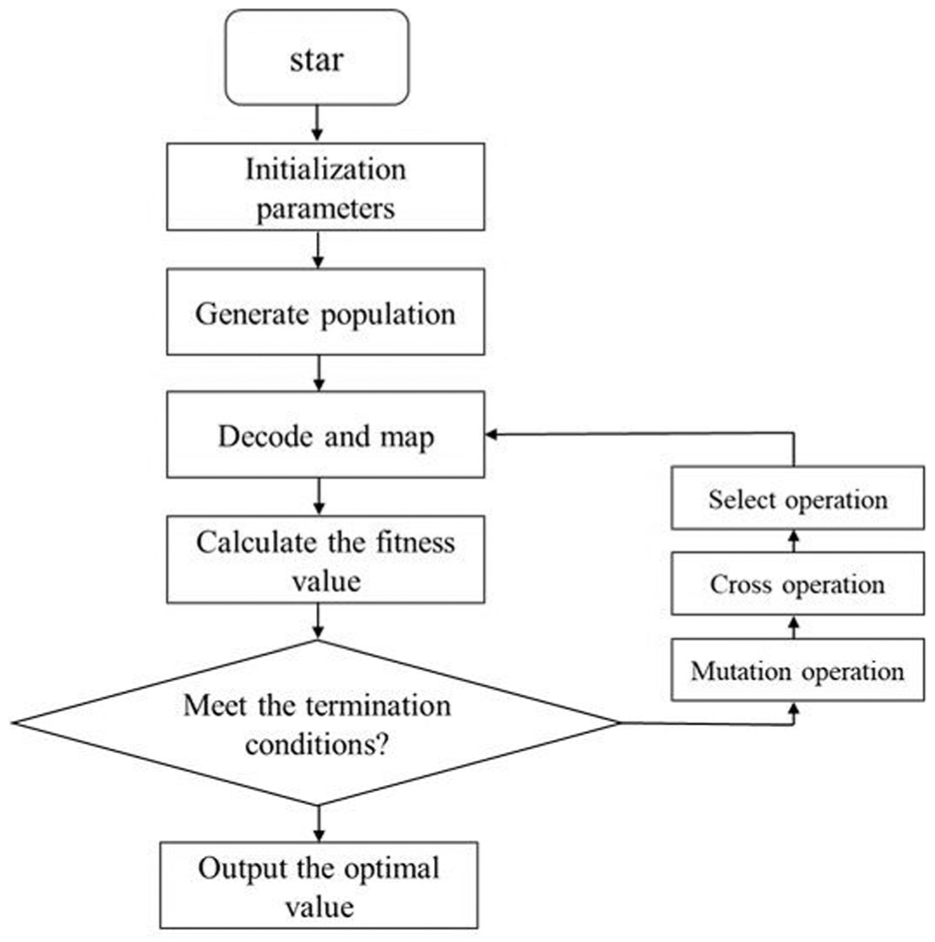
Flow process of the DCGA.
In this study, the passive suspension system is adopted as the benchmark. Under identical parameter settings, the performance indices of the hydro-pneumatic suspension system are normalized by the corresponding indices of the passive suspension system. On this basis, the objective (fitness) function is formulated as follows19,20:

where
Numerical simulation and analysis
The experimental road conditions considered in this study consist of a random road and an discrete bump road, as illustrated in Figure 5. The vertical acceleration of the unsprung mass during vehicle operation was measured using a vertical accelerometer mounted on the unsprung mass. The acquired acceleration signals were processed with a bandwidth filter to suppress high-frequency noise and low-frequency drift. Subsequently, the filtered acceleration data were integrated to derive the corresponding velocity and displacement, which were used as input signals for the unsprung mass. The displacement input of the unsprung mass is presented in Figure 6.

Vehicle test road conditions: (a) discrete bump road and (b) Random road.
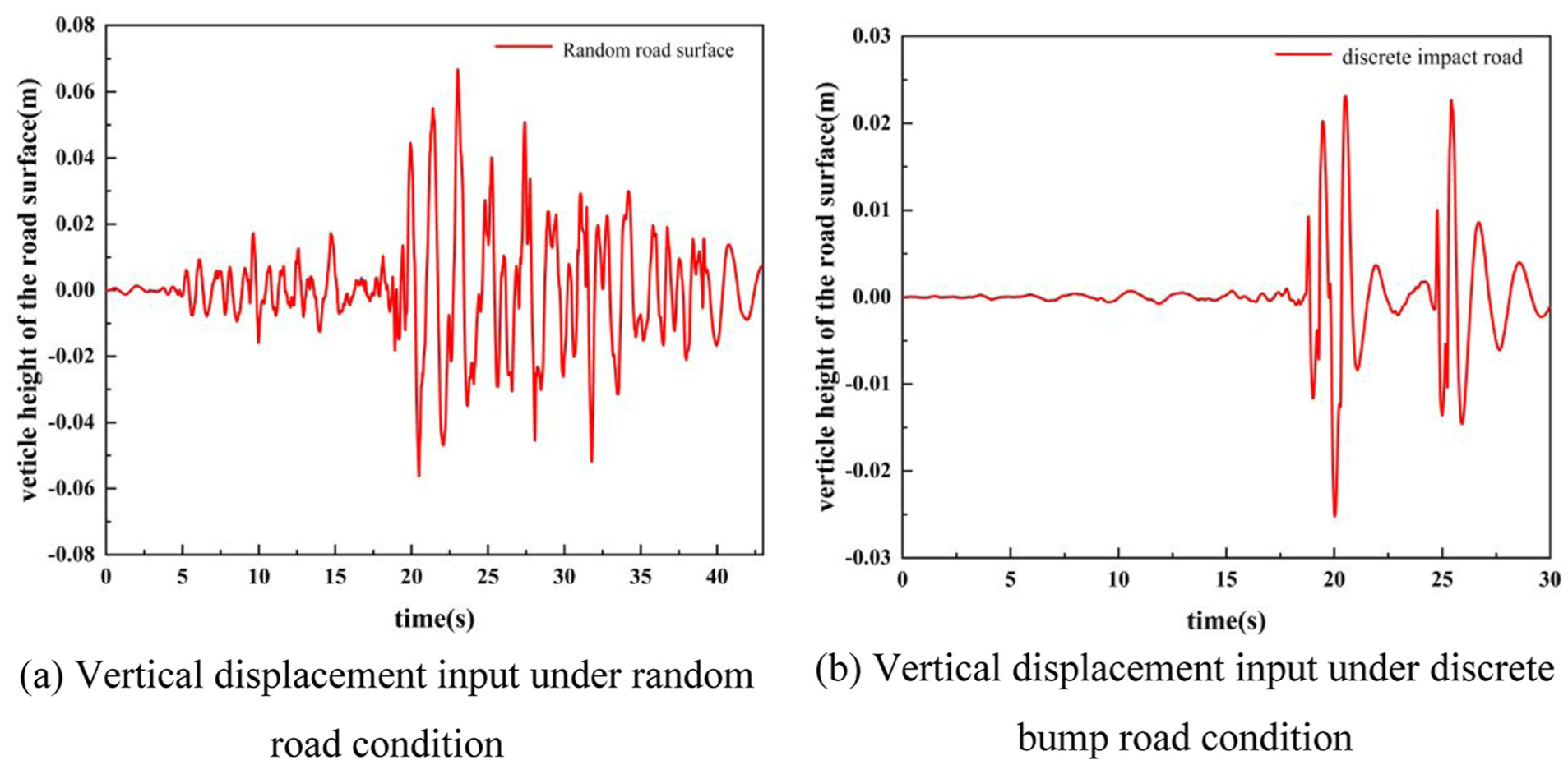
Road vertical displacement input: (a) vertical displacement input under random road condition and (b) vertical displacement input under discrete bump road condition.
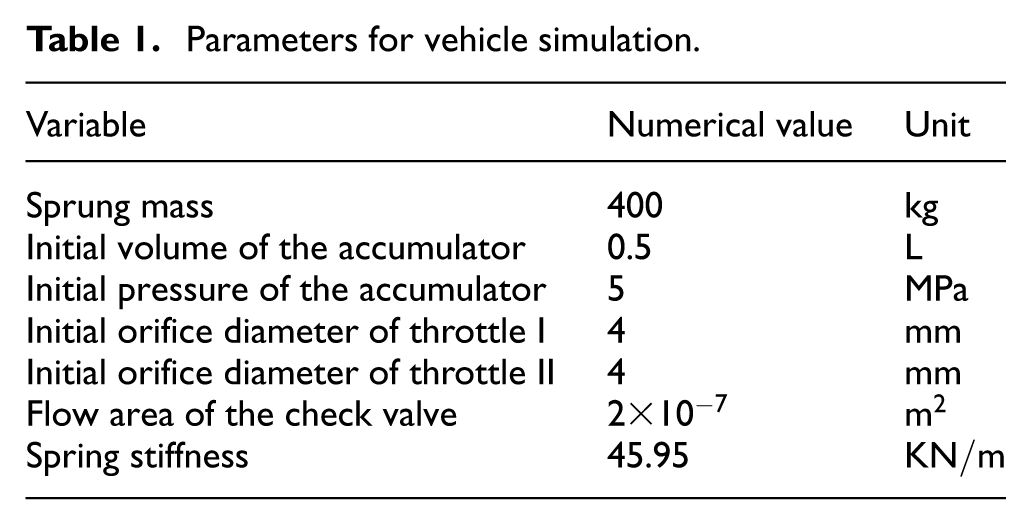
A quarter-car hydro-pneumatic suspension model was developed in MATLAB–Simulink, using the vertical vibration of the unsprung mass during vehicle operation as the excitation input. The DCGA was applied to determine the throttle valve orifice size, with the aim of enhancing ride comfort under different road conditions. The throttle valve orifice was chosen from a set of ten discrete candidate values (DET = 0.5, 0.8, 1.0, 1.2, 1.5, 2.0, 2.5, 3.0, 3.5, 4.0 mm), and the population size was set to 50, the maximum number of generations was set to 100, the elite count was set to 5, and the crossover fraction was set to 0.4. When the GA algorithm was applied, the damping orifice diameters were allowed to vary within the range of 0.5–4 mm. The vehicle’s simulation parameters are listed in Table 1.
Parameters for vehicle simulation.
The evolution of the fitness values of the optimal individuals during the optimization process was recorded. As shown in Figure 7(a) and (b), when using the DCGA algorithm, the fitness value of the optimal solution converged to 0.5002 under the discrete bump road condition and to 0.5109 under the random road condition. Similarly, as illustrated in Figure 7(c) and (d), when using the conventional GA algorithm, the optimal fitness value converged to 0.8167 under the discrete bump road condition and to 0.8395 under the random condition.
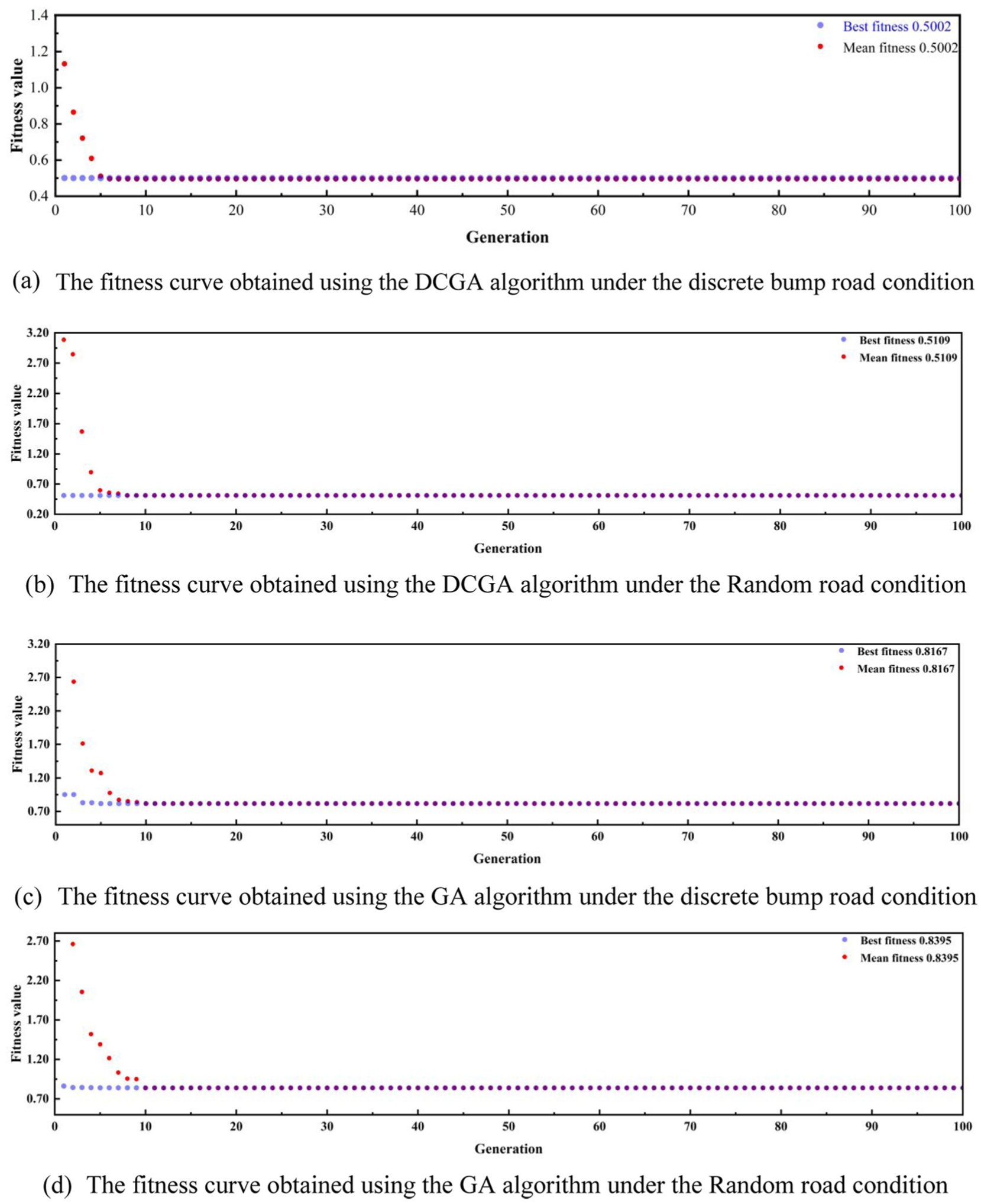
Fitness curve: (a) the fitness curve obtained using the DCGA algorithm under the discrete bump road condition, (b) the fitness curve obtained using the DCGA algorithm under the Random road condition, (c) the fitness curve obtained using the GA algorithm under the discrete bump road condition, and (d) the fitness curve obtained using the GA algorithm under the Random road condition.
Table 2 presents the optimization results obtained using the DCGA and GA algorithms, respectively. Under identical operating conditions, the damping orifice diameters determined by the two optimization methods show only minor differences. Since the DCGA algorithm selects the optimal value directly from a predefined discrete set, the results obtained using DCGA can be readily applied in practical engineering applications.
The damping holes obtained through optimization using different algorithms.

By applying the DCGA, the throttle valve orifice diameters under discrete bump road condition were determined to be
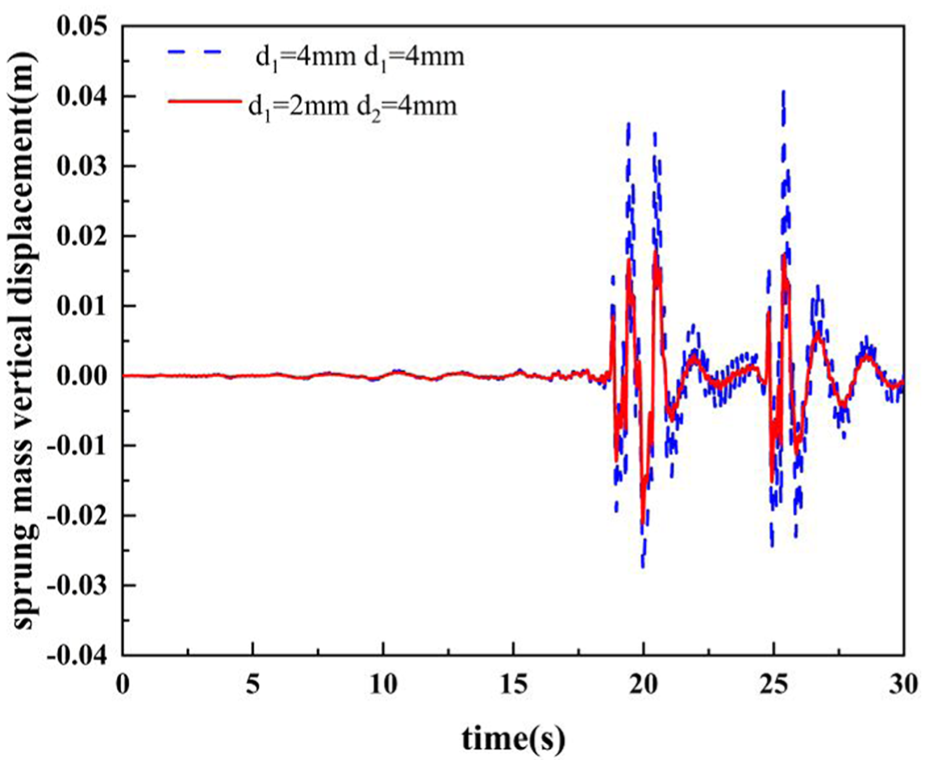
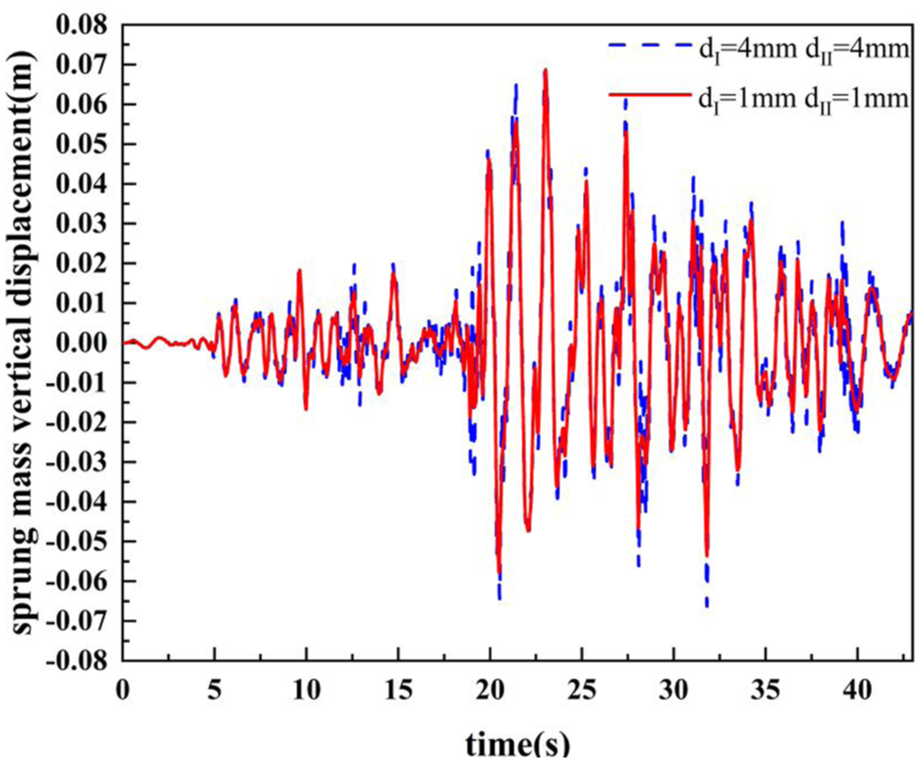
Vertical displacement response of the vehicle body under the discrete bump road condition.
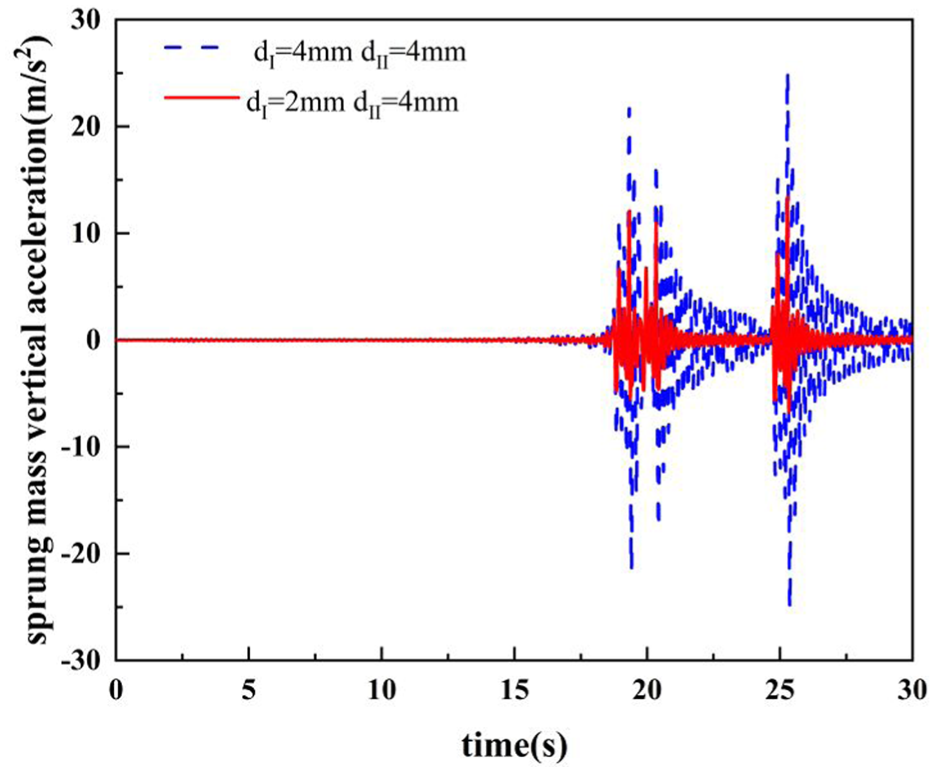
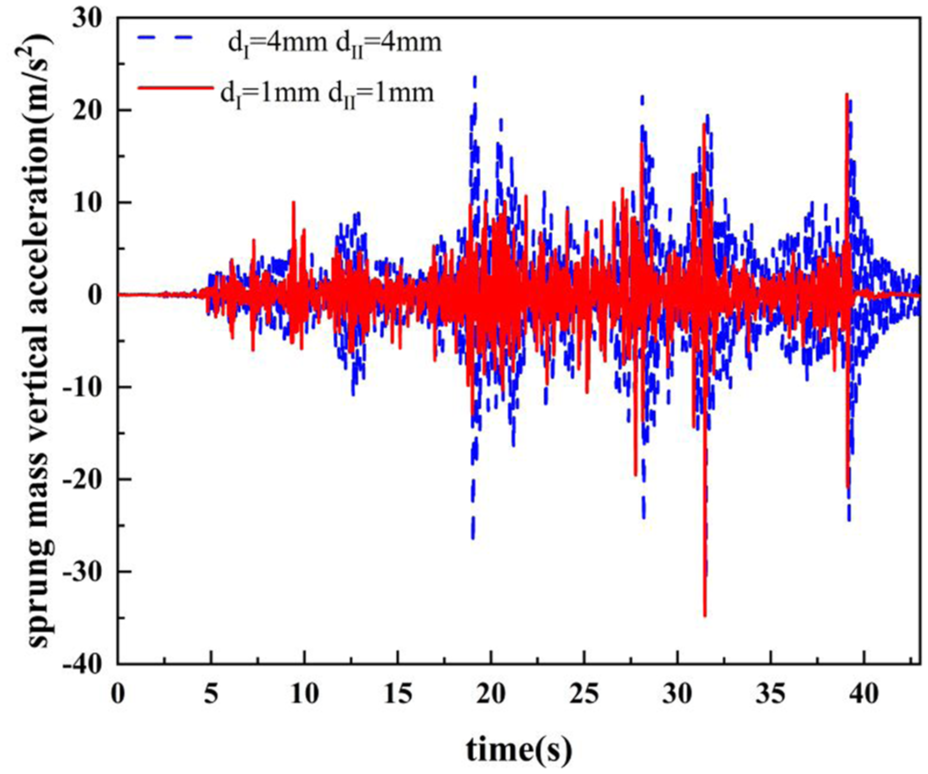
Vehicle body vertical acceleration response under discrete bump road condition.
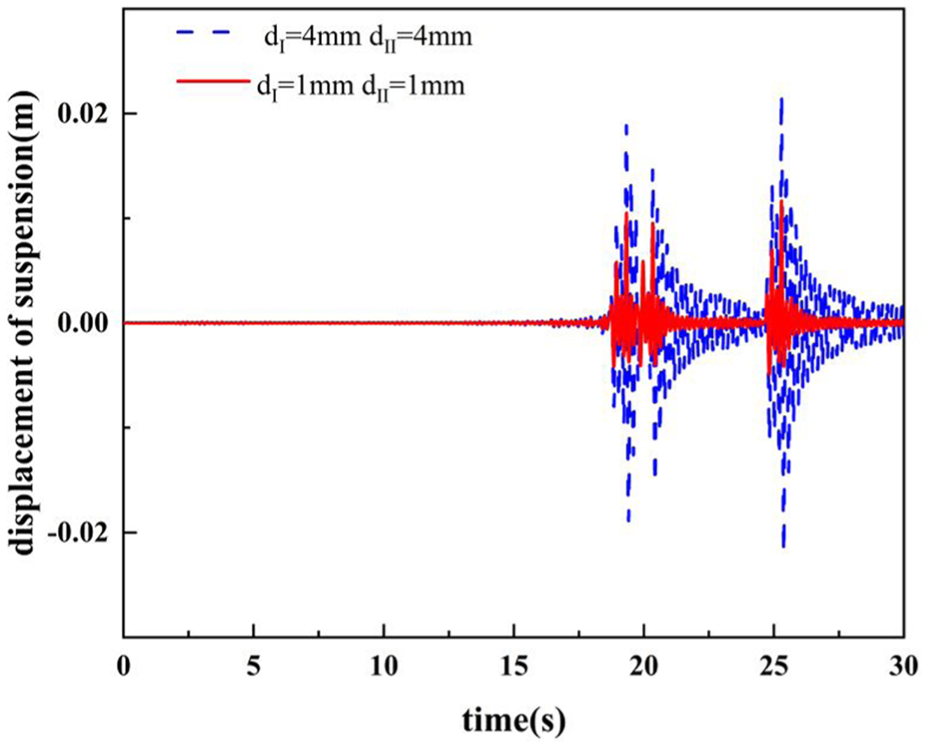
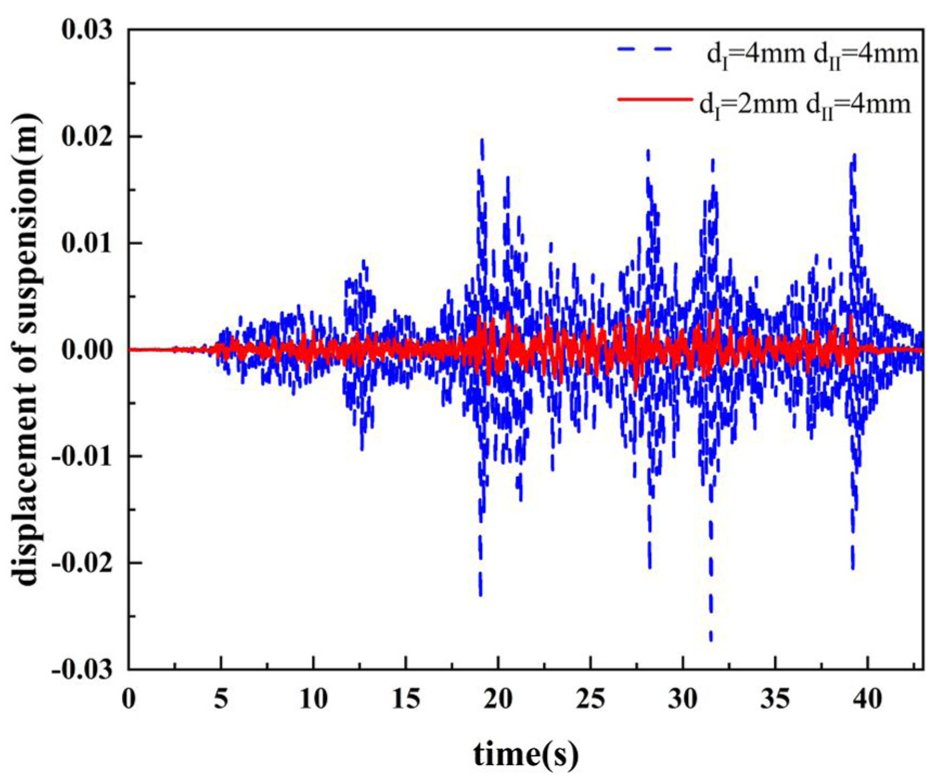
Vehicle body suspension dynamic deflection under discrete bump road condition.
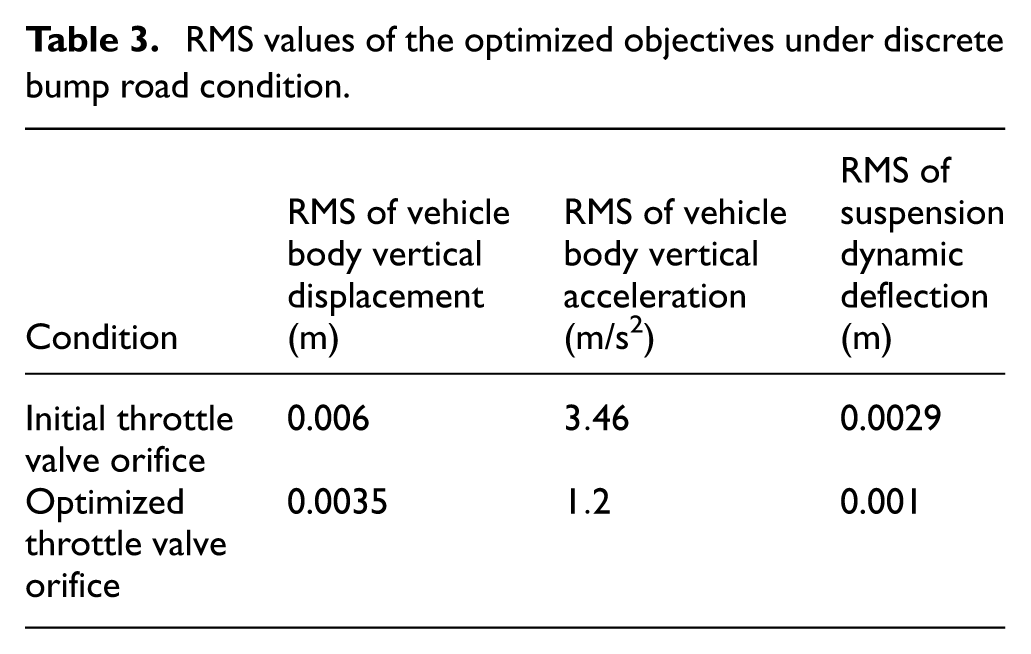
RMS values of the optimized objectives under discrete bump road condition.
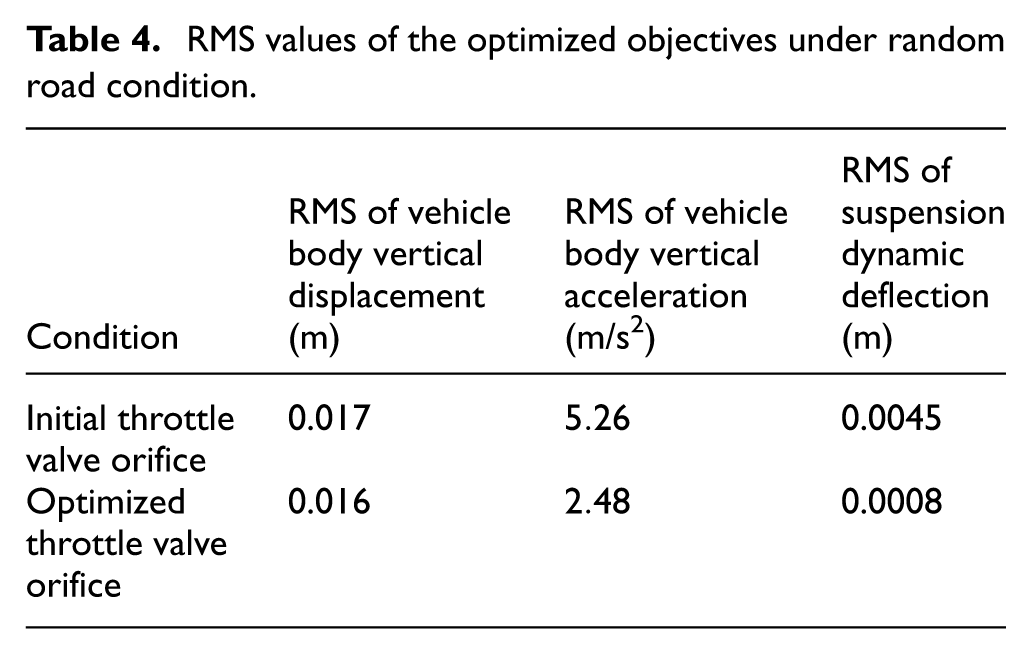
By applying the DCGA, the throttle valve orifice diameters under random road condition were determined to be
Vertical displacement response of the vehicle body in the random road condition.
Vertical acceleration response of the vehicle body in the random road condition.
Response of suspension dynamic deflection in the random road condition.
RMS values of the optimized objectives under random road condition.
Conclusion
This study simplified the vehicle suspension system into a spring–damper model and developed a one-fourth hydro-pneumatic suspension numerical model. The DCGA was applied to determine the throttle valve orifice sizes under both discrete bump road and random road conditions, with the aim of enhancing ride comfort. The key findings can be summarized as follows:
The proposed DCGA is capable of selecting optimal values from a discrete set, thereby ensuring that the computed throttle valve orifice sizes are consistent with practical constraints.
Under discrete bump road condition, the optimized throttle valve orifices achieved reductions of 41.6% in vehicle body vertical displacement, 65.3% in vertical acceleration, and 65.5% in suspension dynamic deflection compared with the initial configuration. Under random road conditions, the optimized orifices reduced these indices by 5.8%, 52.8%, and 82.2%, respectively.
This study is primarily dedicated to enhancing the genetic algorithm for the selection of optimal damping orifice sizes, thereby improving vehicle ride comfort. Nevertheless, the investigation is limited in that no comparative analysis with alternative optimization algorithms has been performed, and only a quarter-vehicle model is considered, neglecting full-vehicle multi-degree-of-freedom coupling phenomena such as pitch and roll. Future research will address these limitations by incorporating full-vehicle dynamic modeling and conducting systematic comparisons with other optimization techniques.
Footnotes
Ethical considerations
All authors confirm compliance with academic integrity standards in data analysis and result reporting.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: “This research was funded by Project supported by the Joint Funds of the National Natural Science Foundation of China, grant number U24A6008.”
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data that support the findings of this study are available from the author, Ziqi Huang, upon reasonable request.