
Abstract
Unsteady aerodynamics can significantly affect the design of highly maneuverable aircraft that fly at high angles of attack. Conventional modeling methods, such as polynomial methods or lookup tables, are of limited value. This investigation was motivated by the need for an accurate and simplified prediction of unsteady aerodynamics by modeling experimental data. Such modeling is important for preliminary aircraft design purposes and control law development, which is a challenging problem when considering a highly nonlinear aerodynamic loading model. In this study, a neuro-fuzzy (NF) model developed using experimental data was favorably compared with other modeling techniques and semi-empirical methods. The model uses three inputs (angle of attack, non-dimensional pitch rate, and aspect ratio) and outputs the aerodynamic normal force coefficient, which was found with a root mean square error of less than 6% for an angle of attack range of 0°–90°. The proposed NF modeling procedure is demonstrated and recommended for use with other aerodynamic force coefficients as the new model outputs. The minimum and maximum angles of attack should be used as model inputs to improve model accuracy for multiple ranges of angles of attack.
Keywords
Introduction
In aerodynamics, laminar airflow is smooth and orderly, reducing drag and improving fuel efficiency and performance, while turbulent airflow is chaotic, increasing drag and energy loss. Laminar flow creates less disruptive wake turbulence, enhancing safety for trailing aircraft, whereas turbulent airflow (vortex) may produce significant wake vortices that pose hazards, especially to smaller aircraft following larger ones. 1 Furthermore, to reduce the airplane, drag force, designers optimize the aircraft’s shape for smooth airflow, ensuring surfaces are clean and free of debris. Many aerodynamic designs can be applied for that purpose such as winglets and streamlined fuselage contours to reduce parasitic drag. Modern aircraft are designed to operate under unsteady aerodynamics and at high angles of attack. For example, tactical fighters and other aircraft types can reach 90° and execute controlled transient maneuvers beyond the stall angle. This capability requires fly-by-wire control, thrust vectoring, and low-aspect-ratio (AR) lifting surfaces for airflow control at high angles of attack. Delta wings and their flight envelopes, which include extremely high angles of attack, were critical in this case. These requirements have motivated several experimental attempts to investigate and model complex unsteady aerodynamics, including the characteristics of flow separation, vortex sheets, and vortex bursting. In existing flight simulations, few methods are commonly used to address unsteady aerodynamics attributed to high angles of attack.2–7 Although some conventional approaches to system modeling perform poorly in handling complex nonlinear systems, where it is difficult to find a global functional or analytical structure, artificial intelligence (AI), particularly neuro-fuzzy (NF) logic, can help model such complex systems. Fuzzy logic (FL) is developed as a mathematical framework to solve uncertainty. In traditional logic, true and false statements are used, while (FL) allows for degrees of truth between 0 and 1. 8 FL is suitable for handling problems in real-world scenarios that involve vagueness and ambiguity. Aslan et al. 9 utilized FL for Model reference adaptive controllers (MRACs), which are widely employed in various industrial application areas due to their adaptability to variable conditions. FL was proposed to improve MRAC performance. This methodology is employed in the current study. On the other hand, Machine Learning (ML) is a computational algorithm developed to perform a task without being explicitly programed. This enables computers to learn and make predictions or decisions based on data. ML has various types of algorithms mainly; supervised learning, unsupervised learning, and reinforcement learning.10,11 The author in Ref. 12 conducted a study to check the appropriateness of Fuzzy Logic (FL) to model unsteady aerodynamics where it was found promising and hence carried out the full investigation as presented in this paper and extensively discussed in the next sections.
Talpur et al. 13 conducted a thorough investigation and indicated that in recent years, deep neural networks (DNN) have made significant strides in handling large and complex datasets, albeit criticized for their black-box nature. This criticism has spurred the exploration of hybrid approaches, leading to the development of novel systems termed deep neuro-fuzzy systems (DNFS). Research on DNFS implementation has surged across various domains like computing, healthcare, transportation, finance, and aerospace offering high interpretability and reasonable accuracy. Talpur et al. study undertakes a systematic review to assess the current progress, trends, challenges, and future scope of DNFS research. The study identifies and analyzes 105 relevant publications between 2015 and 2020. Findings indicate active growth in DNFS research with significant potential for future applications. Tumse et al. 14 conducted a study aimed to create a monthly average Heat Index (HI) map for Türkiye using a mathematical model by AccuWeather, an artificial neural network (ANN), and an adaptive neuro-fuzzy inference system (ANFIS). Using data from 81 measuring stations, including temperature, humidity, wind speed, and atmospheric pressure; it was found that HI can be efficiently predicted in locations lacking data through ANN and ANFIS methods. The models demonstrated good agreement with actual HI values, though ANN outperformed ANFIS in accuracy. Both models effectively predict HI using geographical inputs, reducing the need for extensive testing and saving resources.
Fuzzy logic (FL) techniques have been successfully utilized to model nonlinear unsteady aerodynamics. The angle of attack (α), side-slip angle, and elevator deflection were used as FL inputs to reasonably predict the aerodynamic coefficients. 15 Furthermore, FL was investigated using aerodynamic data obtained from forced pitching and rolling oscillations at high angles of attack, which shows that it can effectively predict unsteady aerodynamics. 16 Other AI techniques, such as recurrent neural networks, have been used to identify aerodynamic stalls at high angles of attack. For instance, Zhang et al. 17 used recurrent neural networks with training data obtained from a computational fluid dynamics method to investigate the unsteady aerodynamic parameters of an NACA0012 airfoil. Machine learning techniques have been widely applied across diverse fields, including complex engineering applications. Li et al. 18 leveraged machine learning to model the intricate structures of aeroengine turbine rotors. Their study focused on evaluating the reliability performance of turbine rotors, characterized by multiple correlated failure modes. To address this challenge, they proposed a Vectorial Surrogate Model (VSM) method, which integrates a linkage sampling technique and a model updating strategy. This innovative approach was tested on a typical high-pressure turbine rotor, considering correlated failure modes such as deformation, stress, and strain failures. The proposed method enabled the researchers to obtain critical insights, including response distributions, reliability degrees, sensitivity metrics, and correlation relationships between the failure modes. Comparative analyses demonstrated that the VSM method outperformed existing approaches by providing an efficient and accurate probabilistic evaluation of multi-failure correlations.
Pradhan et al. 19 employed a Convolutional Neural Network (CNN) combined with Shapley Additive Explanation (SHAP) for geological mapping and the exploration of gold mineral prospects. Their study aimed to model known gold occurrences about multiple thematic layers, facilitating the replication of results in adjacent regions. The findings revealed that the central parts of the study area exhibited a significantly higher gold prospect potential compared to surrounding regions. A cascade ensemble learning (CEL) approach was developed using a wavelet neural network-based AdaBoost model and a cascade synchronous strategy (CSS) for multi-level reliability analysis. This innovative approach offers a heuristic framework for evaluating the multi-level reliability of complex aerospace engineering systems. Applied to a turbine rotor system, the method provided insights into reliability performance under varying operating conditions and multiple failure modes. Specifically, it quantified the failure correlations across three operating conditions (90%, 95%, and 100% loading) and three failure modes: deformation, stress, and strain. The results validated the effectiveness of the proposed method in modeling and simulating complex engineering systems from a system-engineering perspective. Despite its strengths, the method has limitations. The current validation case considers only maximum deformation, stress, and strain as failure modes. Additional research is needed to extend its applicability to more complex failure scenarios, such as low-cycle and high-cycle fatigue. Given the pervasive challenges of reliability evaluation and optimization in aerospace systems, the approach holds promising potential for broader applications in various engineering fields requiring robust analysis under complex operating conditions and multiple failure modes. 20
Machine learning techniques can be suitable and reliable, depending on the system being investigated. 21 Given the importance of supermaneuvrability in the design of advanced aircraft, unsteady aerodynamics has been a popular topic in both experimental and theoretical investigations. For example, Jarrah 22 conducted an experimental program on unsteady aerodynamics to measure the aerodynamic forces of maneuvering delta wings with ARs of 1, 1.5, and 2. The data obtained by Jarrah 22 were used in the current study for NF modeling, which represents the aerodynamics of advanced fighter super maneuvers at high angles of attack up to 90°. Bragg et al. 23 studied the aerodynamic loads on a delta wing oscillating up to a post-stall angle of attack. The aerodynamic load coefficients (lift, drag, normal force, rolling moment, and pitching moment) were obtained and plotted for various Reynolds numbers and reduced frequencies at the side-slip angles of 0°, 5°, and 15°. An appreciable aerodynamic load hysteresis was observed, and the effect of the Reynolds number was moderate. Several other relevant investigations have been conducted to date. Ericsson 24 presented an analysis based on small perturbations in the mean static α. Superposition was used to obtain unsteady aerodynamic derivatives, and Smith 25 reviewed theoretical methods for predicting steady and unsteady separated flows over wings at high angles of attack. Tumse et al. 26 investigated machine learning techniques to estimate the aerodynamic coefficients of a 40° swept delta wing under ground effect using three approaches: feed-forward neural network (FNN), Elman neural network (ENN), and adaptive neuro-fuzzy inference system (ANFIS). The optimal configurations of these models were compared, with ENN emerging as the most accurate. The models predicted the lift (CL) and drag (CD) coefficients at a ground proximity of h/c = 0.4 using data from h/c = 1, 0.7, 0.55, 0.25, and 0.1 (h/c refers to the ratio of the height h above the ground to the chord length c of the wing. Inputs included the angle of attack (α) and ground distance (h/c), with outputs being CL and CD. The ENN achieved the highest accuracy, with 1.0709% MAPE, 0.00595 RMSE, and 0.00504 MAE for CL prediction, outperforming FNN and ANFIS. Results demonstrate that these models can effectively forecast the aerodynamic coefficients underground effect, reducing the need for extensive experimental measurements and associated costs. Zhang et al 27 used a promising data-driven approach to predict the thrust of the rocket engine by employing a deep neural network architecture. They extracted advanced features from the preprocessed data to predict solid rocket motor thrust.
Tümse et al. 28 studied wind energy due to the significant attention it received over the last decade, with wind speed being the most critical factor influencing the power output from wind turbines. Due to the unstable nature of wind, it is challenging to establish a direct theoretical relationship between wind power and speed, making simulation essential. Their study predicted wind turbine power (P) using three forecasting methods: adaptive neuro-fuzzy inference system (ANFIS), Elman neural network (ENN), and feed-forward neural network (FNN). The models were trained using wind speed (V) and turbine rotor speed (ṅ) from a dataset of 43,800 entries, with 80% for training and 20% for testing. ANFIS outperformed ENN and FNN, showing lower mean absolute error (MAE) and root mean square error (RMSE) in both stages. Specifically, ANFIS achieved 52.448 kW MAE and 87.204 kW RMSE during training, and 48.675 kW MAE and 78.453 kW RMSE during testing. The coefficient of determination (R2) for ANFIS was 0.9948 in training and 0.9961 in testing, slightly higher than ENN and FNN. Thus, ANFIS proves effective for estimating wind power, reducing the need for extensive experimental measurements and associated costs.
Jarrah 22 and Bragg et al. 23 were most relevant to this investigation, and their experimental data were compared with the NF model outputs. Classical logic cannot simulate the human brain’s approach to abstract decision making. Human expertise is provided by fuzzy linguistic expressions (e.g. when the flow is unsteady), which can be considerably useful if modeled. The FL developed by Zadeh 29 is a form of many-valued logic used to model complex systems influenced by human decisions based on imprecise and non-numerical information. To date, FL has been used in many applications, including control systems, decision-making processes, language processing, automotive systems, and aerospace applications. 30 FL modeling involves appropriately selecting the universe of information and partitioning it into several fuzzy sets represented by membership functions (MFs) that uniformly cover the universe range. MFs are mathematical expressions with subjective parameters that depend on the individual differences in the perception and expression of abstract concepts. Furthermore, MFs are represented by a curve that relates each point in the input space to a membership value between zero and one, known as the degree of membership. The most commonly used MFs investigated and implemented in this study are shown in Figure 1.
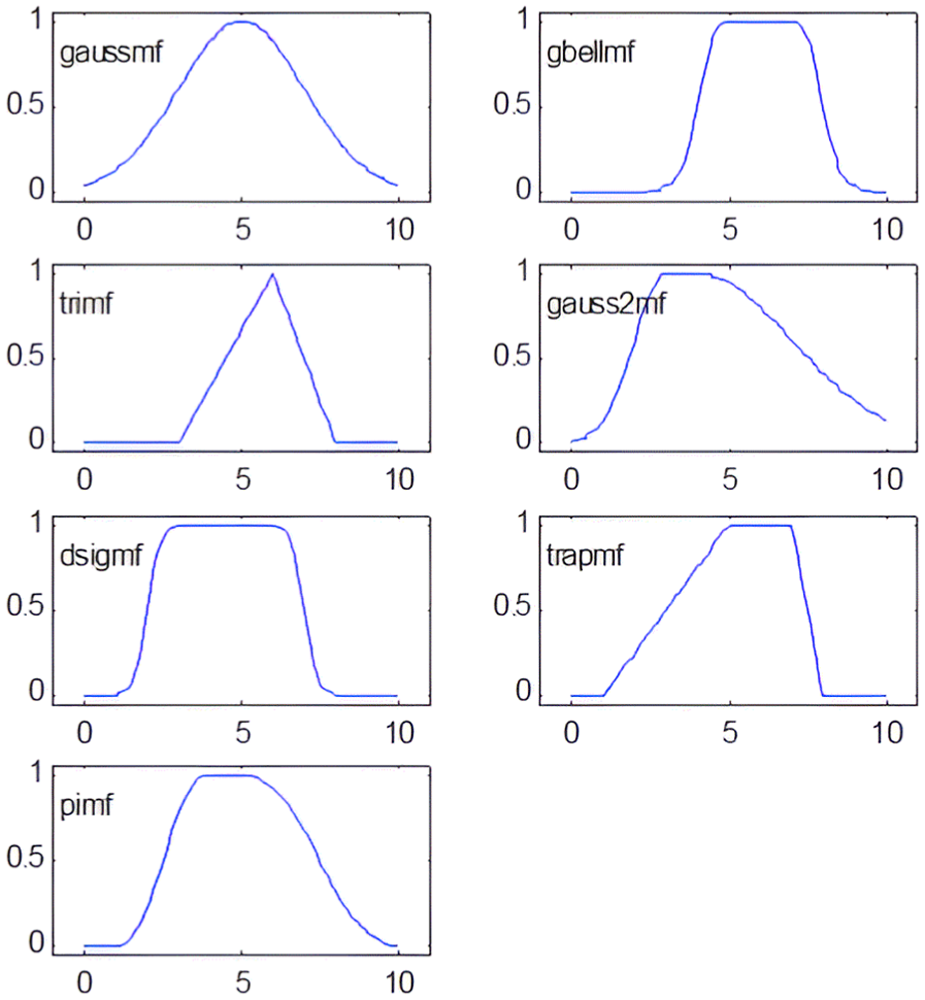
Various types of the most commonly used membership functions.
To date, many investigations have been conducted to determine the MFs that yield the best FL performance. For example, Simon 31 proposed an optimization approach that ensured that the resulting MFs were normal, which is desirable for its natural appeal and easier real-time implementation of FL systems. Many other strategies to select the MFs that are most appropriate for providing an optimal-performance FL model have been investigated and discussed. 32 For example, Sugeno and Tanaka 33 suggested a method for successive identification of a fuzzy model. This method involves two levels. The first level (supervisor) determines the parameter adjustment policy using a set of fuzzy adjustment rules derived from the fuzzy implications of a fuzzy model. The second level (adjustment level) executes the parameter adjustment policy determined by the fuzzy adjustment rules. Two major fuzzy inference systems differ in the manner in which their rules are aggregated and defuzzified: Mamdani, which was initially used to control a steam engine with linguistic rules, and Sugeno, developed by Takagi, Sugeno, and Kang. 34 The main difference between these two systems is that the rule conclusion of the former is a fuzzy set, whereas that of the latter is a crisp value or a function. The preference between the Mamdani and Sugeno types is problem-dependent; the Sugeno method is preferred if numerical data are available. 35 The manner in which fuzzy rules are produced facilitates the incorporation of the human knowledge of a target system into the fuzzy model. The Sugeno system is also referred to as an adaptive-network-based fuzzy inference system, 36 wherein the rule conclusion is a crisp value or function. A fuzzy system with two inputs (x, y) and two rules (Figure 2) has five layers, each having a number of nodes with similar functions.
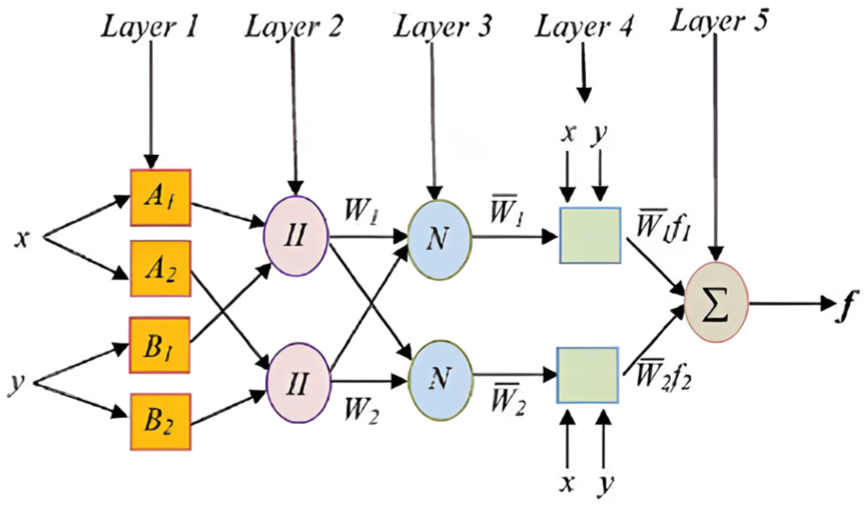
Equivalent adaptive network-based fuzzy inference system architecture for the two-input and two rules first-order Sugeno fuzzy model.
In the next sections various mathematical models were discussed and compared with the investigated modeling method. Followed by detailed analysis and discussion of results. The conclusion is presented highlighting the paper’s main outcomes and future works.
Mathematical model
In this study, NF modeling was performed using experimental data obtained from different resources. The characteristics of these experiments and the obtained data were analyzed to select the appropriate inputs and outputs for the NF models.
Jarrah’s experiment
Jarrah’s experiment
22
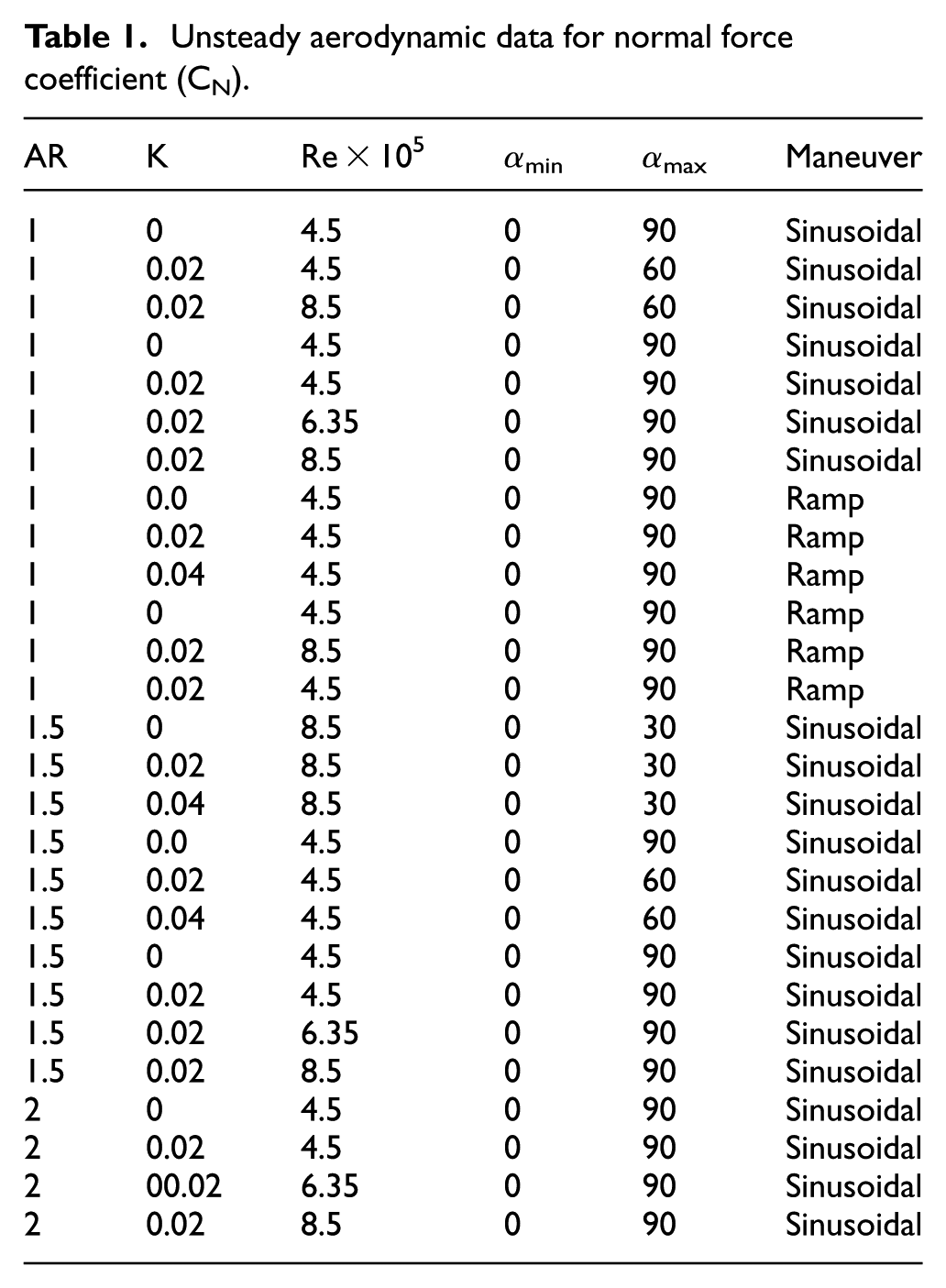
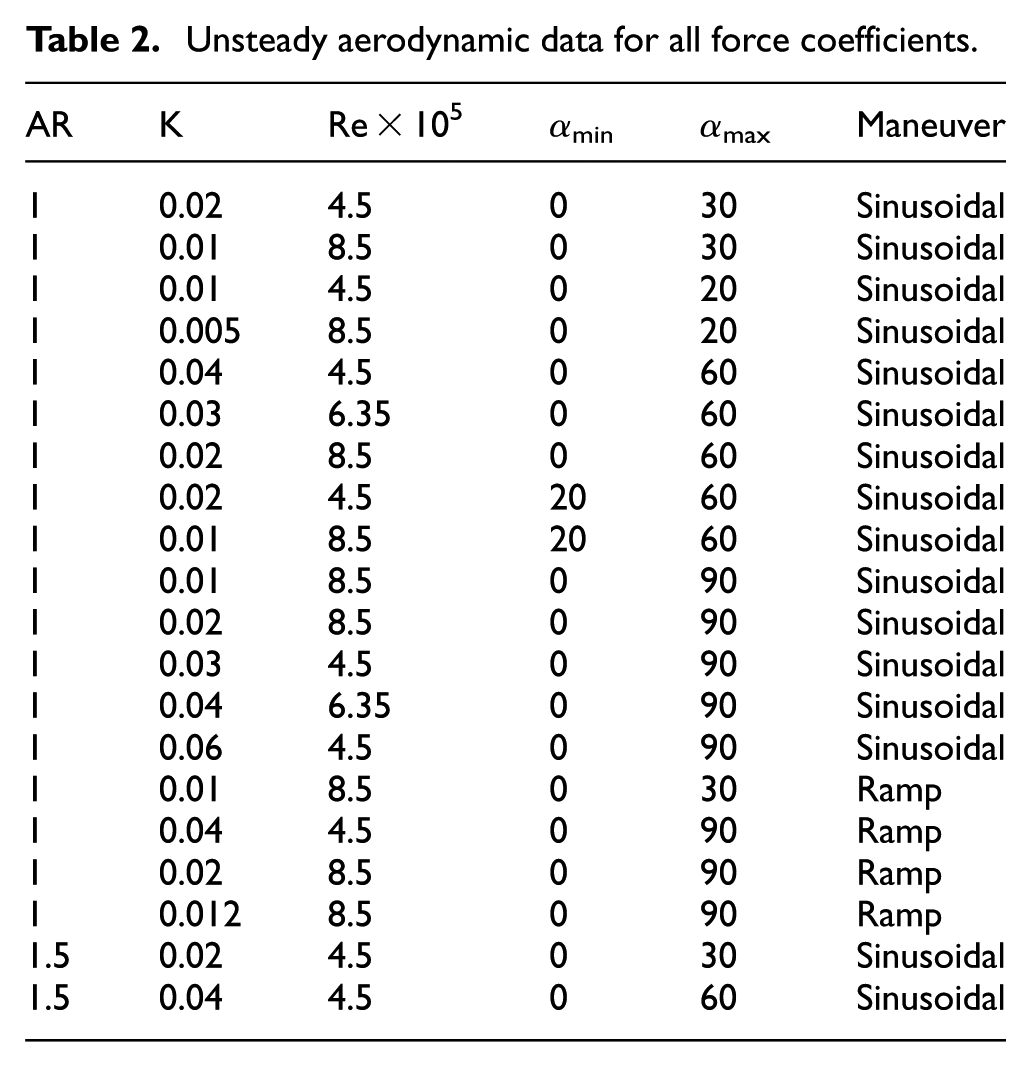
generated a large amount of data; however, only representative data for typical and important cases were selected and discussed in this study (Tables 1 and 2) to illustrate the effects and interactions of the following parameters: α, (AR), and rate of change of the angle of attack (

Unsteady aerodynamic data for normal force coefficient (CN).
Unsteady aerodynamic data for all force coefficients.
The effect of K is integrated in the model through

The time history of α used to obtain the experimental data is

Therefore,



where the ± signs in equation (6) correspond to the pitch-up and pitch-down motions, respectively.
Bragg’s experiment
Bragg et al.
23
conducted an experiment on a simple flat-plate delta wing with a 70° leading-edge sweep using a 5 × 3 × 8 inch wind tunnel to investigate the aerodynamic forces and moments. The wing was made of 0.5-inch-thick plywood with a 20.61-inch root chord and sharp leading and trailing edges. They applied a sinusoidal pitching motion from 0° to 55°, with a steady side-slip angle of up to 15° in increments of 5°. The reduced frequency was kept constant by varying the oscillation frequency with the tunnel speed. A potentiometer was used to determine the instantaneous α. The wing was pitched at ∼57% of the root chord. The z-location of the pitch axis was at about 3.12 inch below the wing chord line. Velocity measurements were performed using a hot-wire probe and pressure transducer. Through data acquisition and reduction procedures, the dynamic data were digitally filtered using an average of several cycles at a sample rate based on the reduced frequency. The data recorded for each angle were the average of several hundred samples over a period of 10–15 s. The second input of the NF model is
Jarrah defines K as


Bragg et al. define K as


According to equation (9), the following K
b
values were expressed in terms of the Jarrah definition of K and the corresponding aerodynamic data were used in this study.
This study aimed to produce an AI model of unsteady aerodynamic loads generated during high-α maneuvering. The NF model predicts aerodynamic loads for a given delta wing by performing a prescribed maneuver. The developed NF model is used to determine the normal force coefficient (
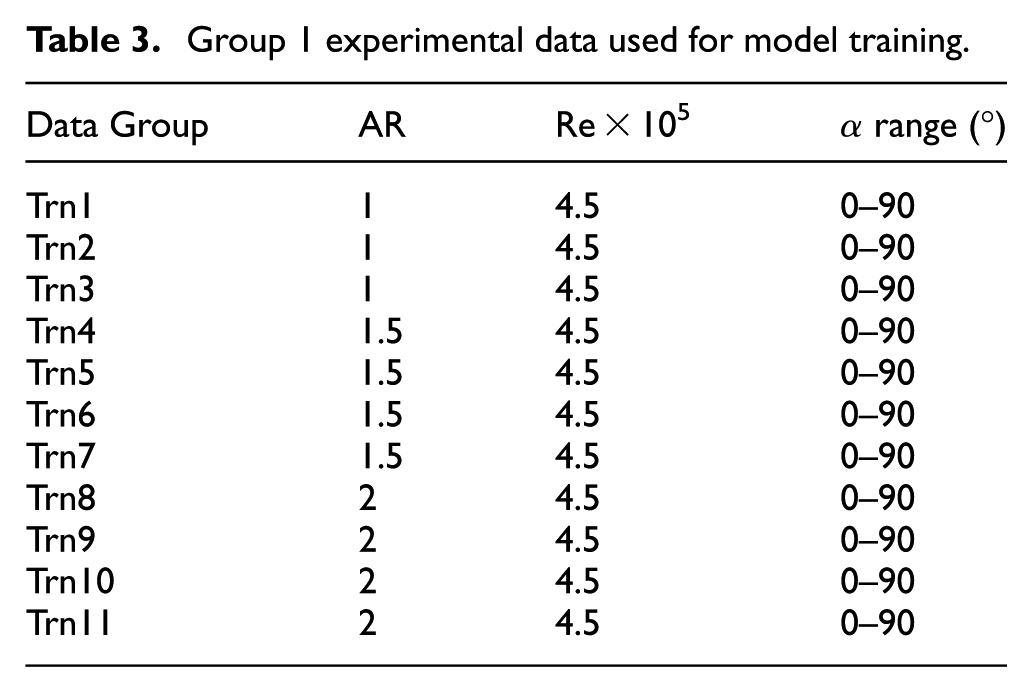
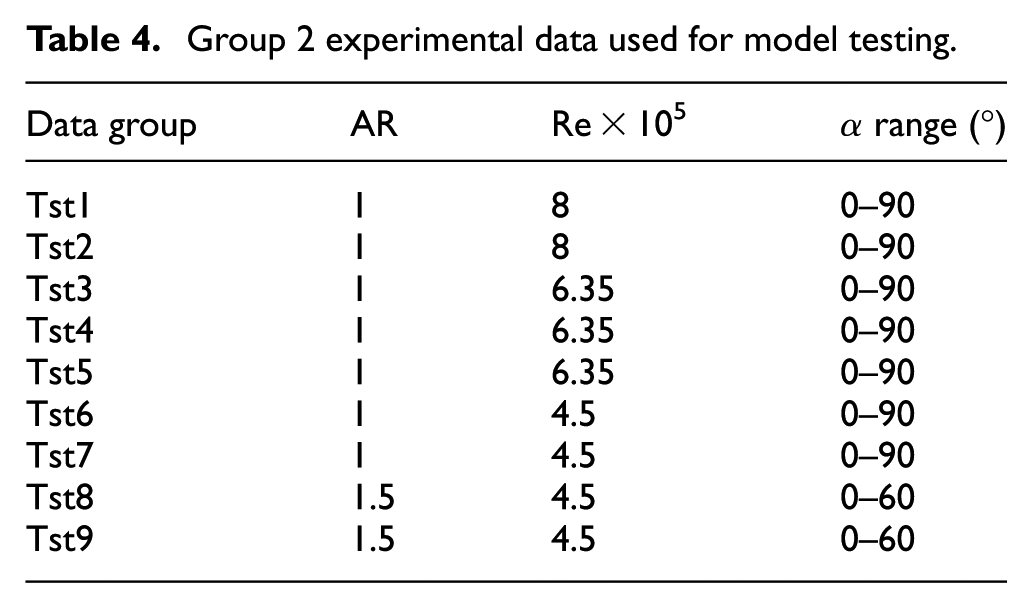
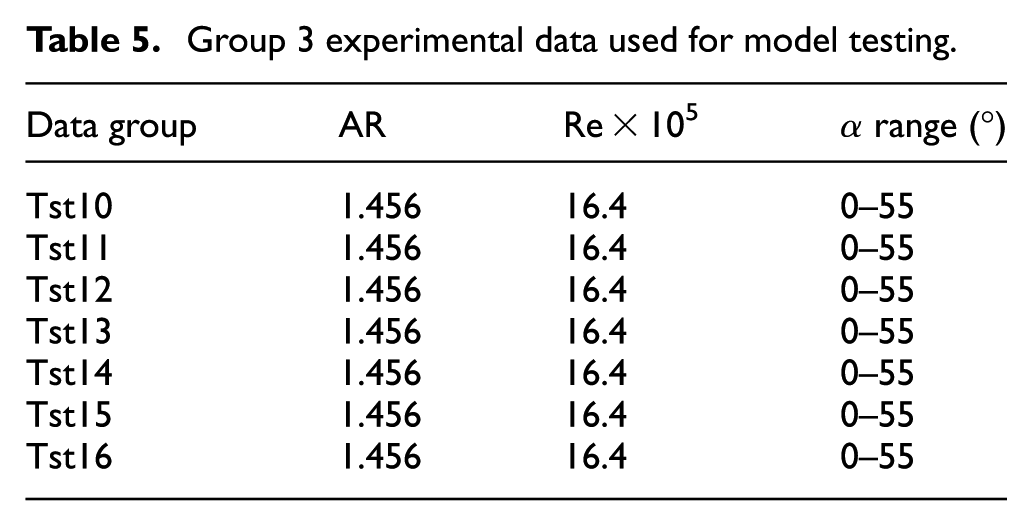
The developed model was used to estimate aerodynamic coefficients with good accuracy for various maneuvers and wings. In addition, this modeling process was used as a guide for general modeling of similar systems. The model was built and trained based on partial experimental data (group 1; Table 3) obtained. 22 The versatility, generality, validity, and accuracy of this model were verified using two groups of experimental data obtained by Jarrah (Table 4, Group 2) 22 and Bragg et al. (Table 5, Group 3). 23 Tables 3 to 5 indicate that the data were easily subdivided into various groups to present and clarify the effects of all the inputs and parameters on the model. Using MATLAB, the data were divided 37 into training, checking, and testing data, where approximately one of every five points was used as the check point. Figure 3 shows the partitioning of the partial data (Table 3/Group 1) into training and checking points. These data were selected based on availability, simplicity, and representativeness. The K range was represented by values between 0 and 0.06, as listed in Table 2. Some values of K such as 0.02, 0.04 were used to check the overall validity of the model by data subgroups Tst1 to Tst9, as shown in Table 4.
Group 1 experimental data used for model training.
Group 2 experimental data used for model testing.
Group 3 experimental data used for model testing.
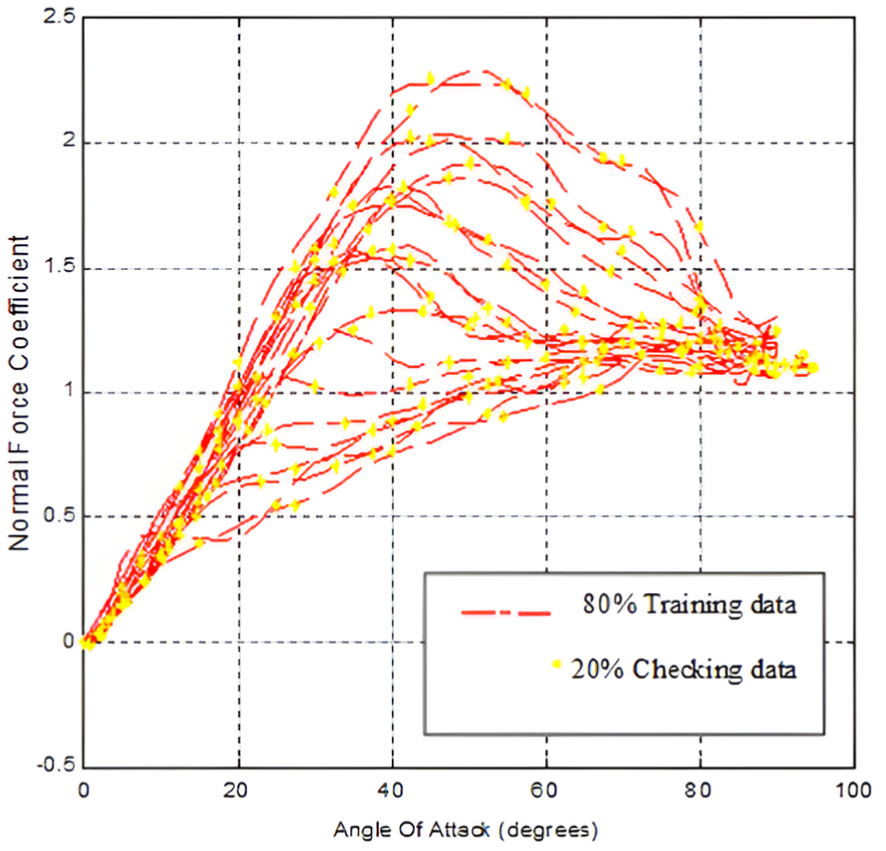
Experimental data partitioning into training and checking data.
Results and discussion
Initial modeling/NF Model 1
The NF modeling process in this investigation started with the simplest model that best fit and tracked the training and checking data with minimal root mean square error (RMSE). RMSE is defined as the average difference between the predicted and actual values produced by a statistical model. It is the residual that stands for the separation between the data points and the regression line. It can be determined by equation 17 as follows:

where: n is the number of observations,
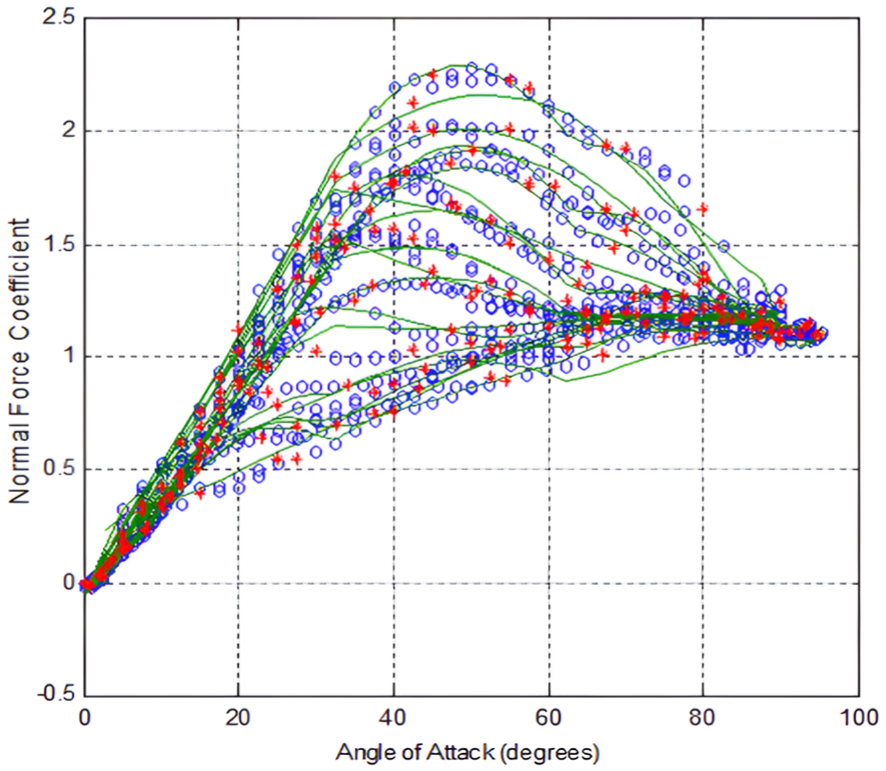
The initial modeling was performed by varying some NF modeling parameters such as the number of MFs, type of MFs, and epoch number. The required MFs best fit the input data in terms of simplicity, convenience, speed, and efficiency. The type and number of MFs were selected by plotting the experimental data and visually dividing the plot into distinct segments. Starting with α, which is the first model input, the experimental data are plotted in Figure 4. The number of MFs for α is set to four; however, the range of the number of MFs for α is considered while fixing the other parameters to justify this choice. The number of MFs for α was 2–9, and the RMSE was found, as illustrated in Figure 5.
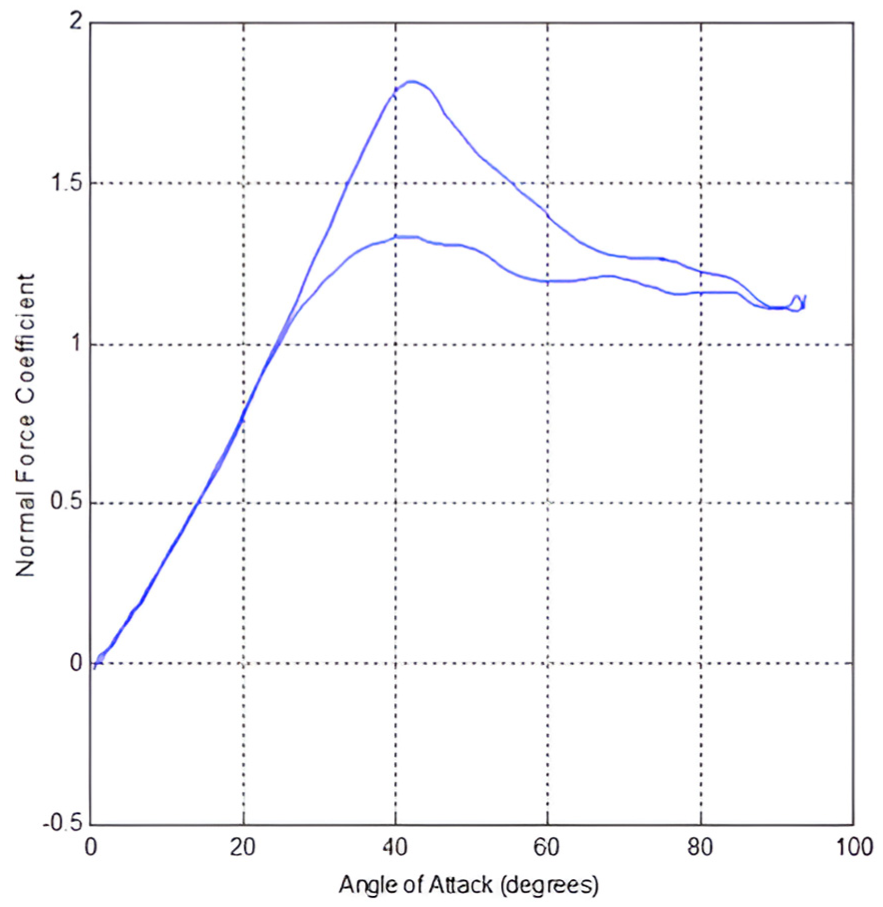
Experimental data at AR = 1 and K = 0.01.
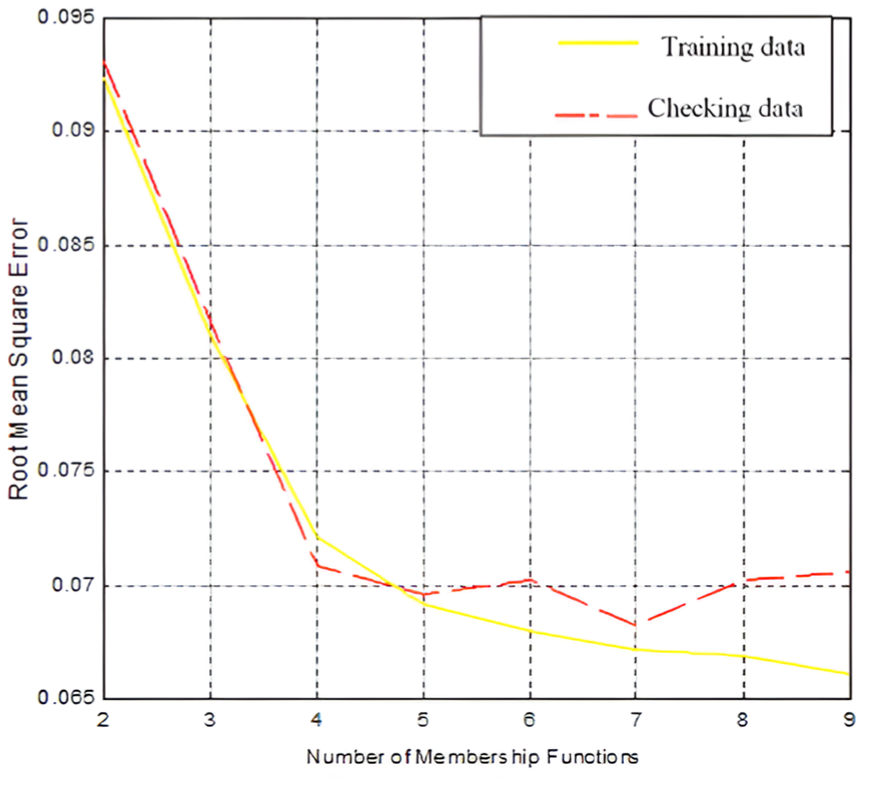
Effect of varying the number of MFs at the angle of attack on prediction accuracy. The number of epoch is 500 and the MF type is Gaussian.
For general training data (Trn1 to Trn 11 as in Table 3), RMSE changed from 9.24% for two MFs to 7.22% for four MF (2.02% difference), whereas it changed to 7.12% for nine MFs (0.1% difference with respect to that for four MFs). The same result was obtained for Group 1 (Figure 3). The optimal number of MFs for α is 4. This is visually evident in Figure 5, where the model complexity when the number of MFs is above four is not associated with a significant RMSE improvement.
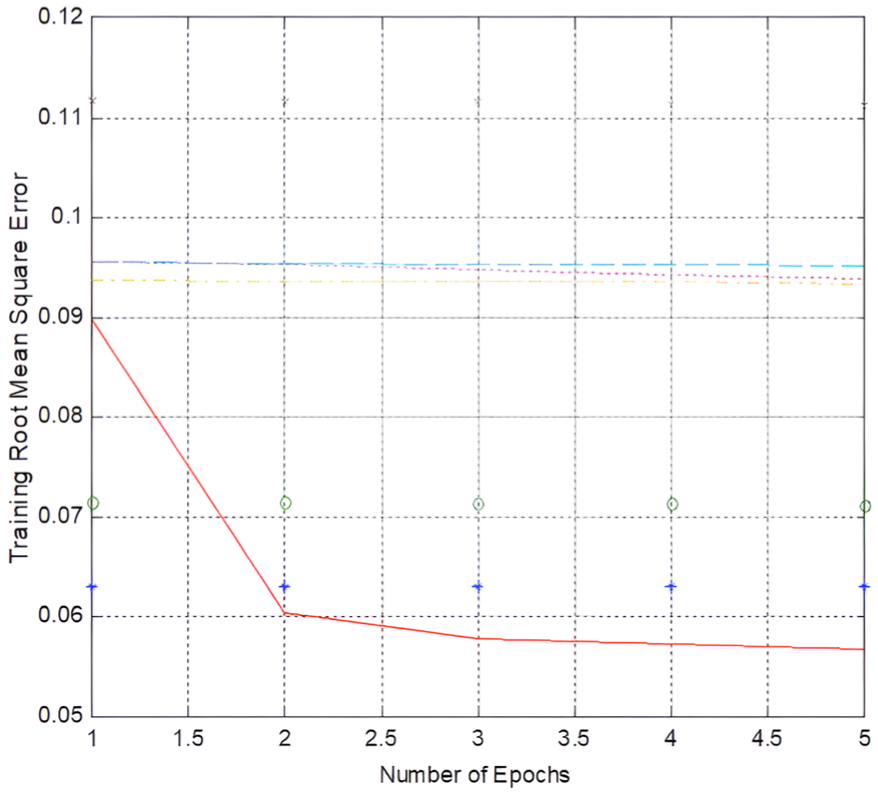
The type of MF was selected by investigating all types of MF, as shown in Figure 1. A comparison of the RMSE values indicated that the effect of the MF type on this model was negligible. The highest RMSE for training data (Trn1 to Trn11) was 7.53% for the triangular MF, and the lowest was 7.01% for both dsig (difference of two sigmoid MF) and trap (trapezoidal) MFs, with a difference of only 0.52%. The triangular MF can be considered to satisfy both the training and checking data equally; therefore, it was selected as the MF type for the initial modeling process (NF Model 1). The RMSE decreases with an increase in the number of epochs, as shown in Figure 6. Therefore, at extremely high epoch numbers, the model rigidly tracked the training data. This adversely affected the prediction of other data outputs, and it was clear that the RMSE decreased significantly from 10.37% at two epochs to 7.22% at 500 epochs. At epoch numbers above 150, the change in the RMSE ceases to be significant.
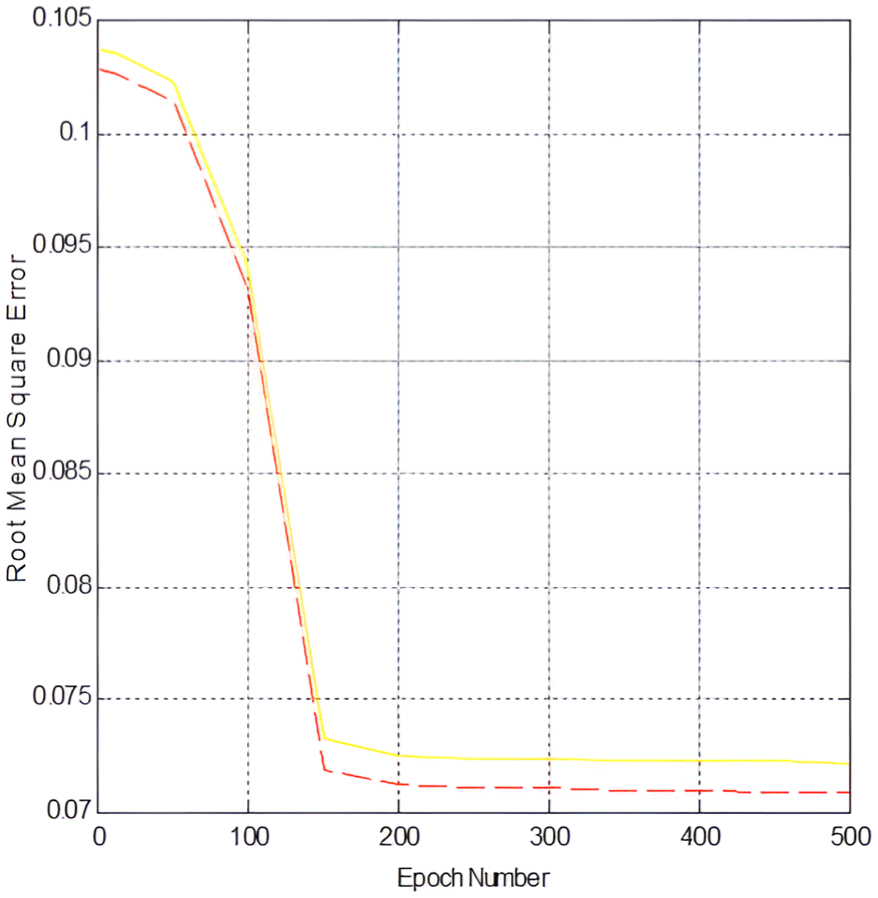
Effect of varying number of epochs on prediction accuracy (MF type is Gaussian, number of MFs are 4, 2, and 3 for
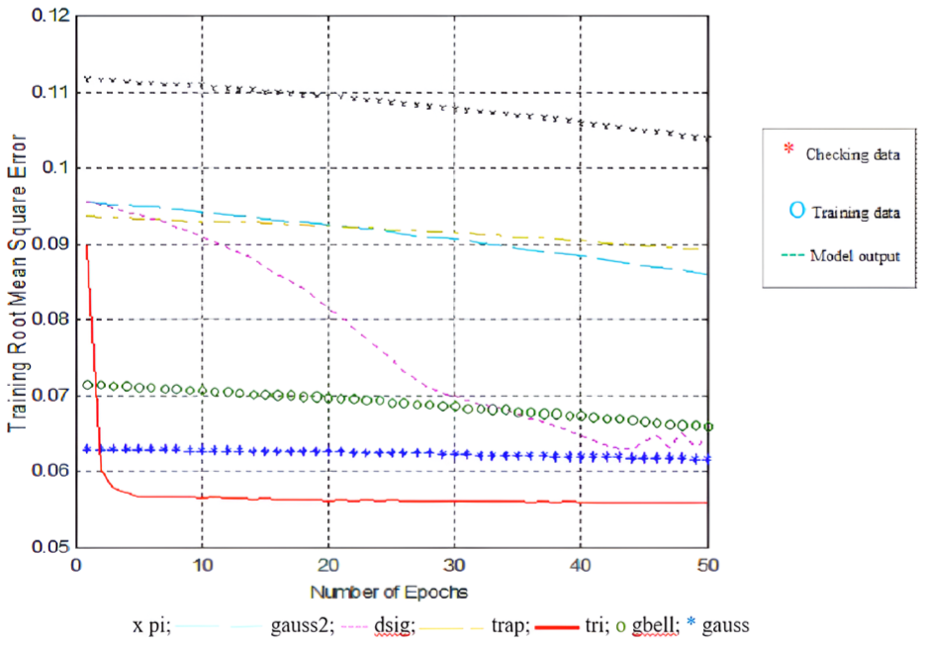
The initial model was run with the following parameters to tune the initial modeling to an appropriate number of epochs: triangular MF type; number of MFs = 4, 3, and 3; and number of epochs = 150. Figure 7 shows that the epoch number can be reduced to less than 50 without adversely affecting the RMSE. minimal RMSE at 150 epochs was 5.59% and 5.81% for training and checking data, respectively; the corresponding values at 50 epochs were 5.60% and 5.80%, and those at 5 epochs were 5.68% and 5.80%, respectively. Therefore, considering the RMSE values, the best choice for the epoch number was 5. Hence, NF Model 1 was set with the following parameters: the type of MF was triangular; the number of MFs was four, three, and three for the three inputs (
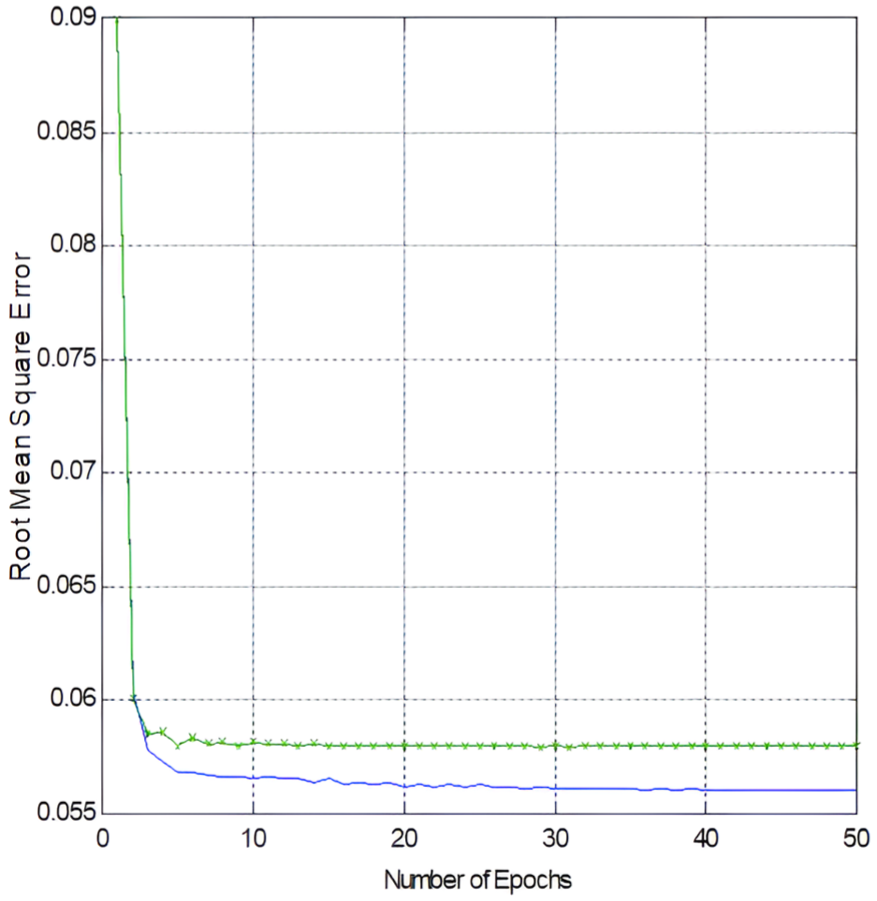
Error curves at 50 epochs and triangular membership function.
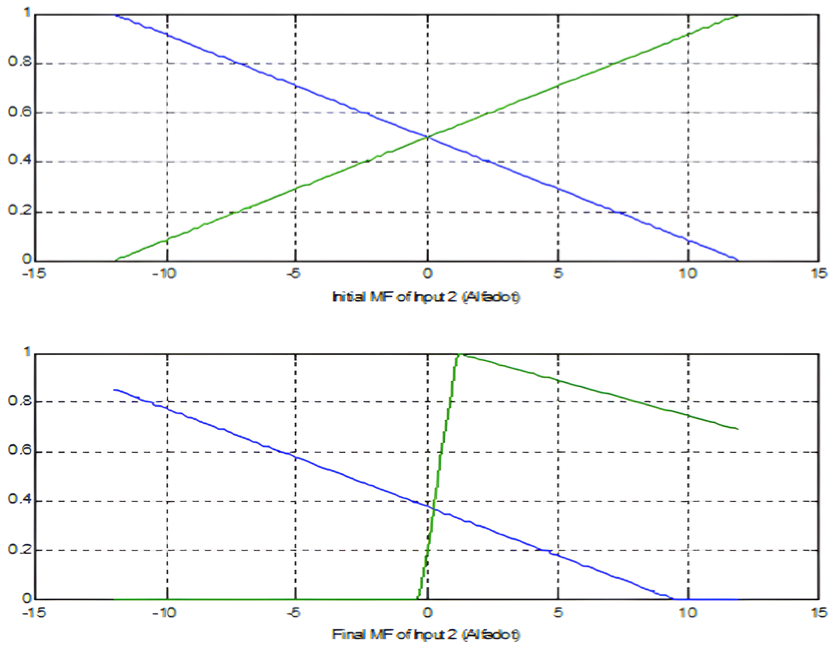
NF Model 1 was the simplest model and provided minimal RMSE for training and checking the data. In other words, it best fits and tracks the local features of the training and checking data plots, while considering simplicity, convenience, speed, accuracy, and efficiency. However, it is necessary to change the rigidity of this model (close tracking of the training data), which can negatively affect the accuracy of predicting other data. This eliminated the need for a general model. This point was monitored through the divergence of the verification data RMSE with respect to the training data RMSE, as shown in Figures 5 to 7. Figure 8 shows the initial MF of NF Model 1, which has the following parameters: the number of MFs is four, three, and three corresponding to
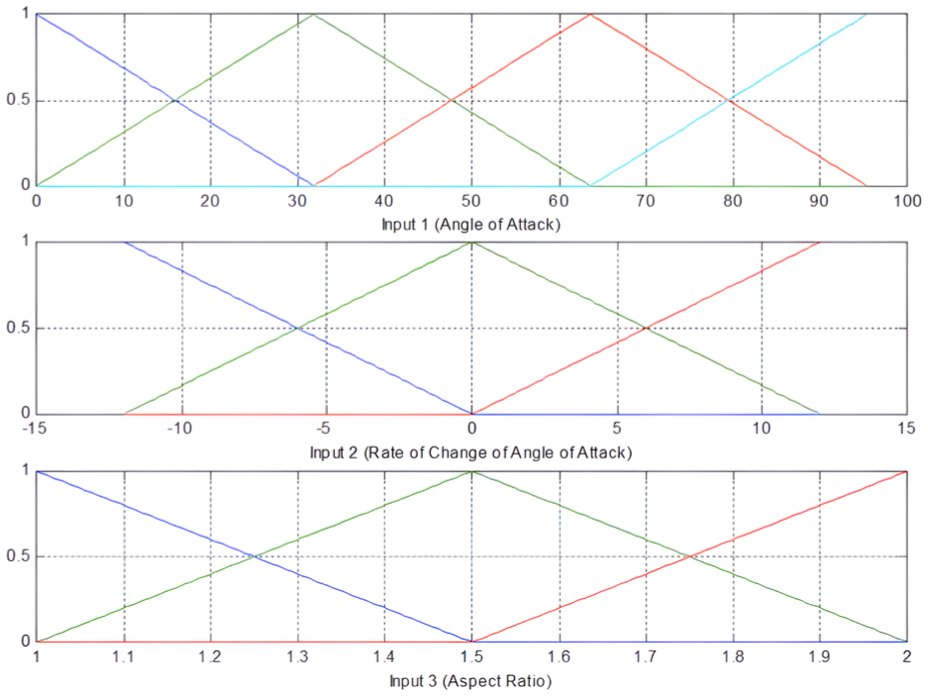
Initial MFs of Model 1 at 5 epochs, number of MFs = [4, 3, and 3], and triangular type MF.
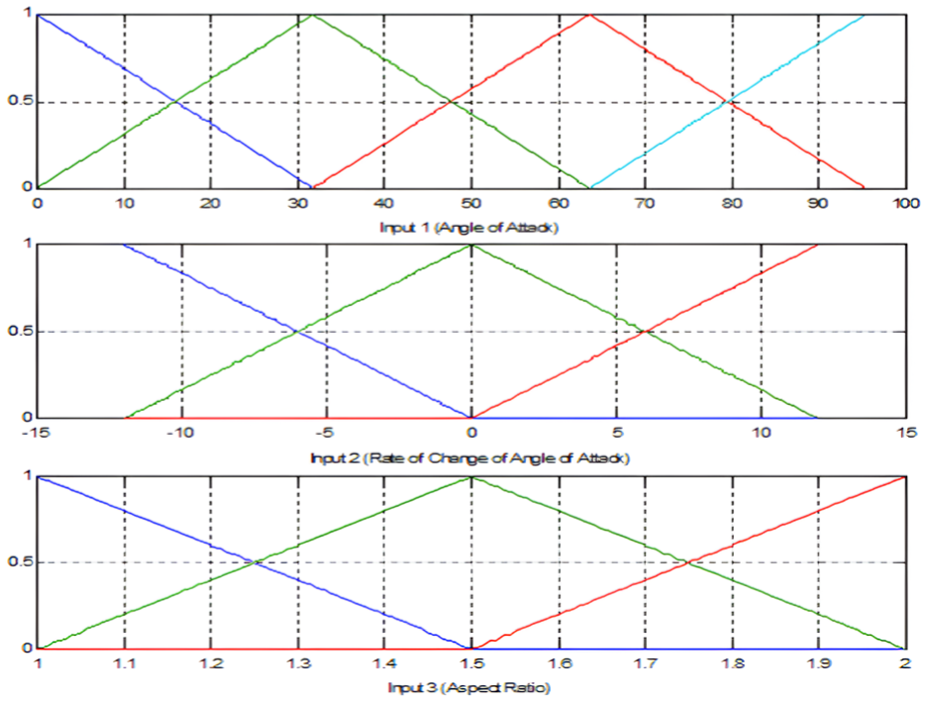
Final MFs of Model 1 at 5 epochs, number of MFs = [4, 3, and 3], and triangular type MF.
Comparison of
Figure 11 shows that the triangular MF has a high rate of convergence compared to other types, where the RMSE goes directly from 8.98% to 6.04% at two epochs, and then to 5.68% at five epochs. The proper selection of the number of MFs is also evident in Figure 12, which represents the initial modeling/NF Model 1 selection of the number of MFs [4, 3, 3], and shows a high rate of convergence of the triangular MF. The outcome of the initial modeling process (NF Model 1) is shown in Figure 13, which reflects the accuracy of this model in predicting the normal force coefficient
Convergence comparison for MF types for 4, 3, and 3 MFs for 5 epochs.
Convergence comparison of MF types for 4, 3, and 3 MFs for 50 epochs.
Outcome of the initial modeling process (NF Model 1). Number of epochs = 5; Number of MFs = [4 3 3]; and type of MF: triangular.
Examining model generality
One of the most important criteria for any model is the extent of generality, that is, the ability of the model to predict other datasets not used for training or checking (Group1-subgroups Trn1 to Trn11, as in Table 3). To this end, other data (Groups 2 and 3-subgroups Tst1 to Tst16, as in Tables 4 and 5) were used to predict their output using NF Model 1. The need to change the initial modeling/NF Model 1 parameters arises if its rigidity (close tracking of training data) negatively affects the accuracy of predicting other data; therefore, it eliminates the benefit of obtaining a general model. The accuracy and value of NF Models 2 and 3 depended significantly on the accuracy of the experimental data and the degree of matching between the different data groups.
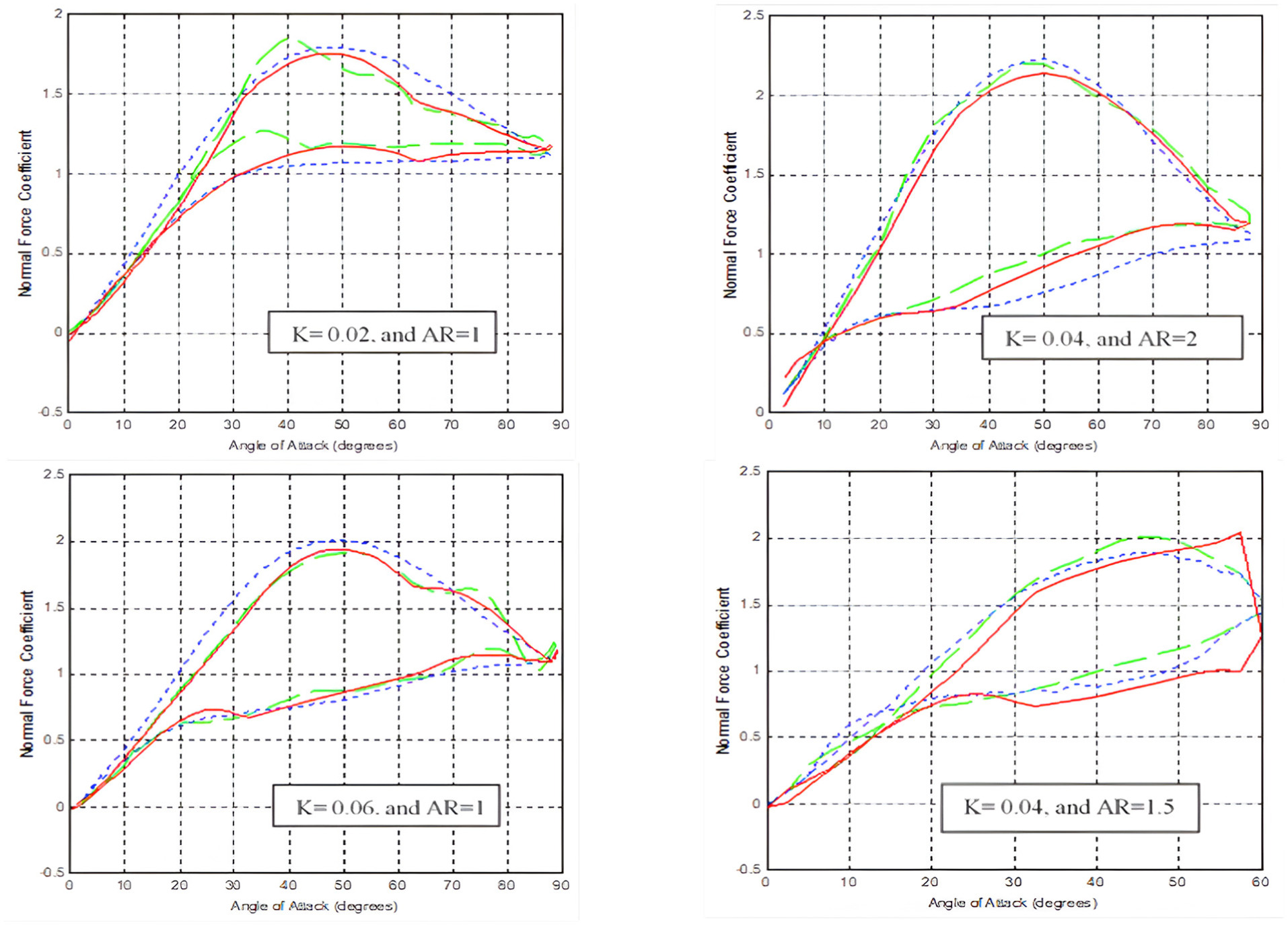
Applying the NF Model 1 parameters to the data in Table 4 revealed that the overall RMSE was 8.35%. In Table 4, the data subgroups Tst1–Tst7 are for
Comparison of NF Model 2/Group 2 data (blue dotted line) to NF Model 1 (Red line).
The previously discussed NF modeling technique was repeated to obtain the simplest model that best fit the data for Group 2 (Table 4). The best choice for the number of MFs of
The type of MF that best suits Group 2 data was studied and selected to be the Gaussian or triangular type, where RMSE was found to be 7.39% and 7.55%, respectively. However, triangular MF has the advantage of satisfying Groups 1, 2, and 3 equally. The lowest and almost unchanged RMSE were obtained for epoch numbers between 2 and 50 (7.08% at two epochs and 7.09% at 50 epochs). Therefore, the simplest model that best fits the Group 2 data has the following parameters: 4, 2, and 3 MFs; triangular MF; and five epochs (two epochs could have been selected, but five were selected for easier comparison with the parameters of NF Model 1). Therefore, the only difference between the parameters of NF Models 1 and 2 (Group2 data model) is the number of
NF Model 2 showed a negligible improvement of 8.27% RMSE compared with 8.35% for NF Model 1. The improvement is introduced especially in the subgroups (Tst8 and Tst9), which represent the 0°–60° maneuver. The RMSE for these two subgroups were 17.53% and 11.76%, respectively, with improvements of 2.34% and 2.87% compared to those of the NF Model 1 RMSE. Another improvement was found in subgroup Tst6, with a difference of 0.96%. A negligible improvement was obtained for Tst5 with an RMSE difference of 0.34%. All other subgroups in Table 4 show an increase in the RMSE of less than 2%. A negative effect of Group 2 data on Model 2 training and checking was evident when the training data RMSE was 14.79% compared to 5.68% obtained by Model 1 (a difference of 9.11%). Therefore, the model optimization performed using the Group 2 data in Table 4 does not deviate significantly from the Model 1 parameters. Therefore, NF Model 1 is still more acceptable than NF Model 2 because it satisfies the training, checking, and data requirements listed in Tables 3 and 4.
Similarly, NF Model 3 was built using the experimental data obtained by Bragg et al.
19
as shown in Table 5. Model 1 parameters were tested using the Group 3 data to further enhance the generality of the model (Table 5). Figure 15 shows that Model 2 for
Comparison of Model 3 (AR = 1.456 & K = 0.0396, green solid line) to Model 2 (AR = 1.5 & K = 0.04, blue line) and Model 1 (AR = 1.5 & K = 0.02, red line).
Model 1 parameters were used to predict the data from Bragg et al. (Table 5). The results are shown in Figure 16. The highest RMSE was 83.61% for the Tst15 subgroup and the lowest was 18.41% for the Tst10 subgroup. Both are considered high, which can be attributed to the differences in the procedures of the two experiments,22,23 as discussed in Section IV. The best model that fits the Group 3 data was investigated to further check whether the problem is with model selection or the differences in the two experiments (applying the same NF Model tuning procedure, the simplest model that best fits the Group 3 data was found and named NF Model 3). The investigation revealed that Model 3 had the following parameters: the number of MFs was two, two, and two for α, AR,
Modeling Group 3 data by NF Model 3 (blue dotted line) and NF Model 1 (red solid line). K = 0.0072, AR = 1.456, and Re = 16.4 × 105.
Accuracy analysis of the final NF model (Model 4)
Based on the analysis carried out previously, the final NF model (Model 4) best fit the training and checking data from Group 1 (Table 3) and Group 2 (Table 4), except for subgroups Tst8 and Tst9, owing to the difference in the α ranges.
Although the RMSE difference based on the selection of number of MFs was as high as 5.81%, the difference in RMSE for the total training data caused by variations in the MF type was only 0.52%. epoch number selection produced an RMSE difference of 3.15% for the total training data from two to 500 epochs. The last three percentages automatically arranged the model sensitivity to parameter selection as follows: highly sensitive to the MF number, less sensitive to the epoch number, and negligibly sensitive to the MF type. Once the appropriate model parameters were selected, the RMSE converged rapidly in a very small number of epochs: 5.68% RMSE was reached at 5 epochs, 7.33% at 150 epochs, and 7.22% at 500 epochs. The accuracy of NF modeling depends significantly on the accuracy of the experimental data used for training. However, the errors (high RMSE) in this NF model are attributed to variations in the experimental data used for training and comparing the various NF model predictions. This is valid for both experiments,22,23 where they have different experimental procedures. The two experiments varied in terms of tare measurements, data filtering, data acquisition, variable definitions (such as
Comparison with semi-empirical data
The normal force coefficient predicted using the semi-empirical method was obtained from Ref.
38
Figure 17 shows the normal force coefficient obtained by the three methods, that is, Jarrah experiment,
22
semi-empirical method,
31
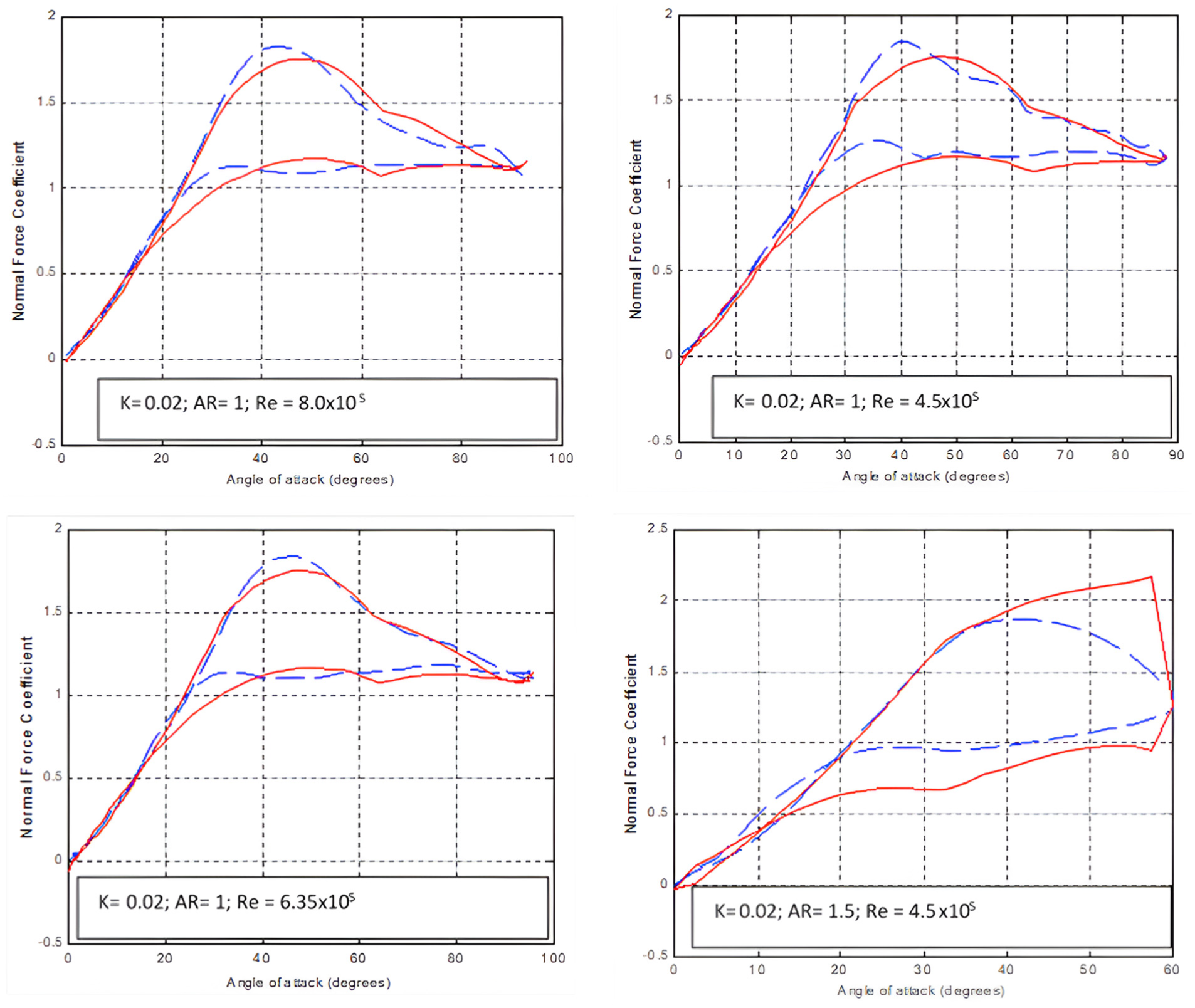
and NF model established in this research. Table 6 shows a comparison between the semi-empirical and NF models based on the RMSE. For AR = 1 and
Comparison of semi-empirical (blue line) NF model (red line) and experiment in Ref. 22 (green line).
Comparison of semi-empirical 3 and investigated NF model.
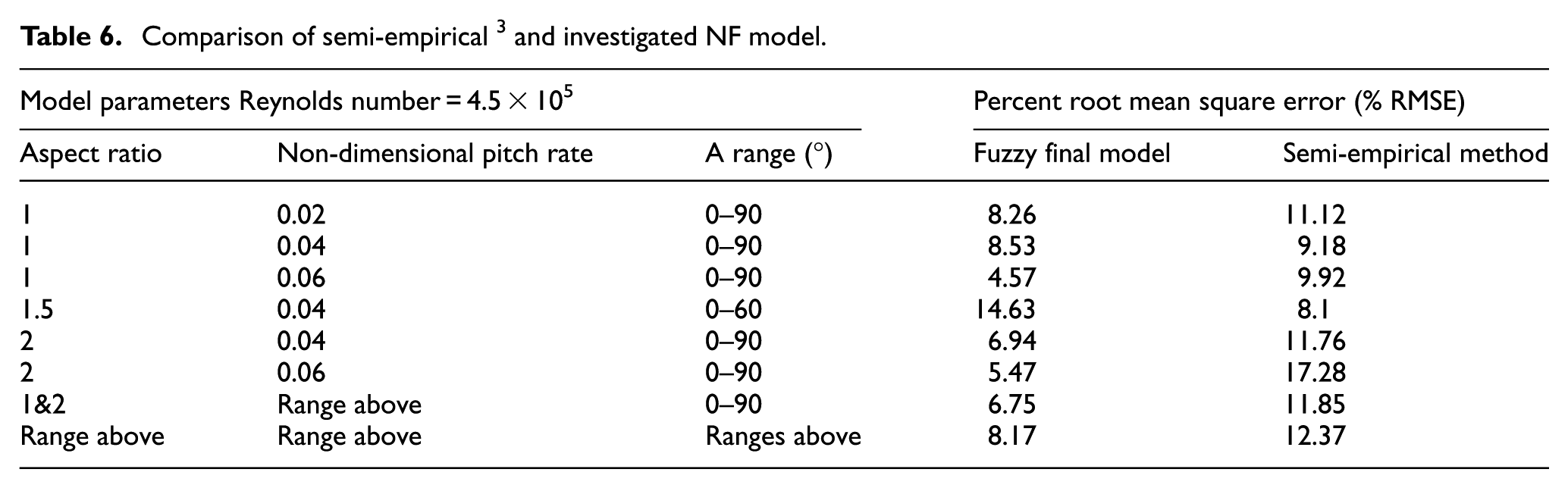
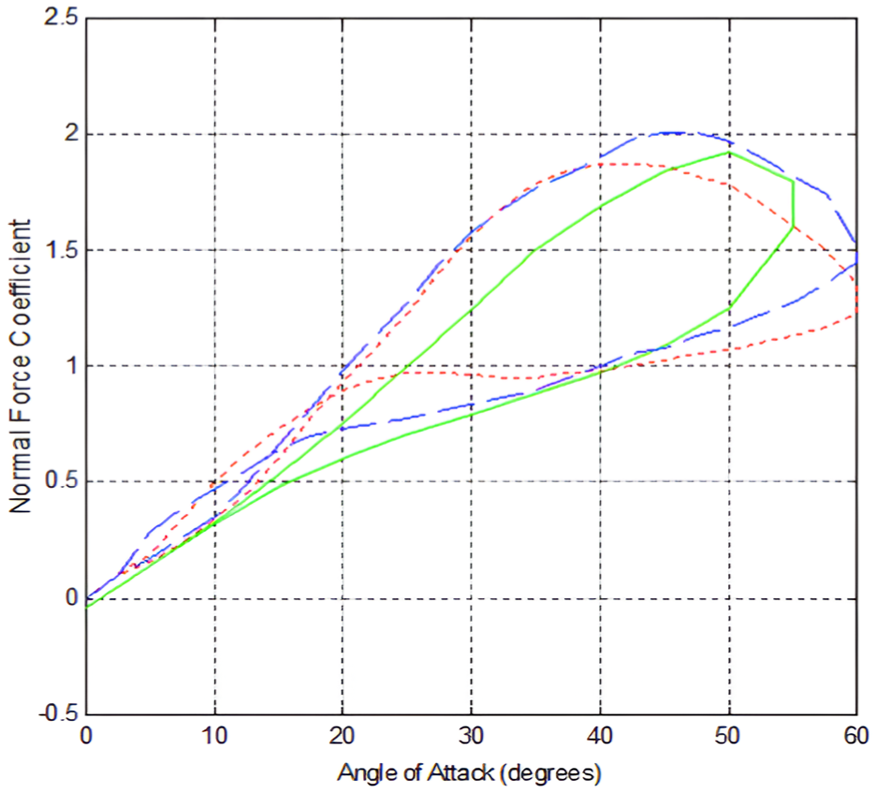
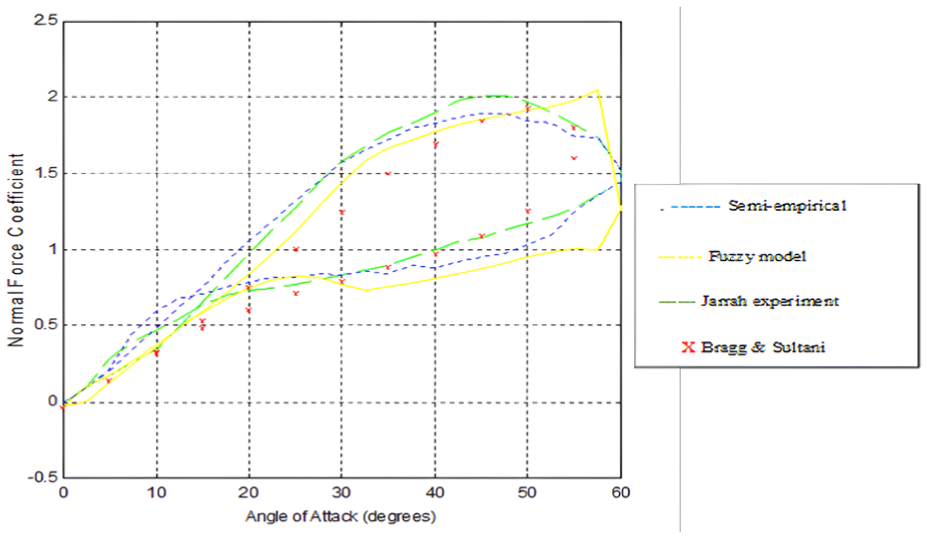
Figure 18 was constructed with the same values as those in Figure 17 and added to the corresponding Bragg et al. data.
19
Bragg et al.’s data deviated from Jarrah’s data
22
during the pitch-up motion. The RMSD between Jarrah experimental data and the corresponding values obtained by the semi-empirical method was 8.10%. For the NF data, it was 14.63%, whereas for Bragg et al.’s data, it was 15.36%. This can be attributed to Jarrah’s experimental procedure, wherein the parameter definitions differed from those used in Bragg et al.’s experiment. Therefore, the comparison favors NF modeling for all input ranges, except for the 0°–60°α range. This is attributed to the NF model being trained based only on the 0°–90°α range and without considering
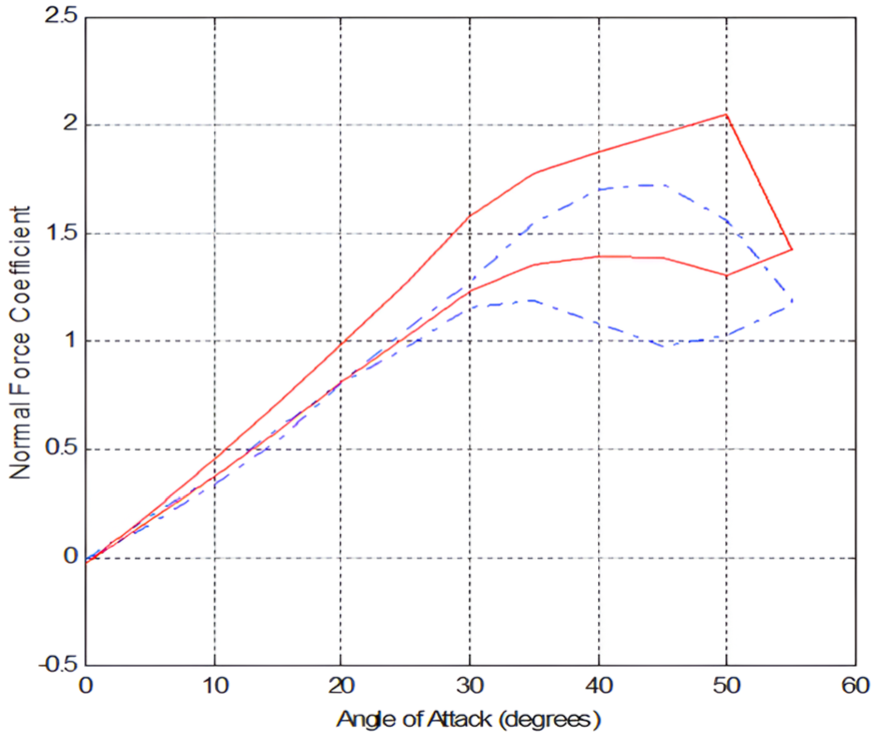
Comparison of semi-empirical, NF model, Jarrah experiment (K = 0.04, AR = 1.5), and Bragg et al. (K = 0.0396, AR = 1.456).
The unsteady aerodynamic coefficients were
1) Low α where the flow is attached or separated but organized.
2) High α where the vortical flow dominates the flow field.
3) An extremely high α is characterized by the breakdown of the vortex and flow structure, an increase in separation drag, and loss of lift.
4) The flow field was characterized by strong wake vortices, where the lift was near zero, and the normal forces on the wing were attributed to those caused by the cross-flow drag.
Aerodynamic experiments and analyses22,23 showed that there are three distinct cases of
The smallest number of epochs is desired because it is simple and saves time; however, this requirement was considered the second priority after the high model prediction accuracy. It was found that five epochs were the most suitable because they provided an RMSE of 5.68% compared to that of 5.6% at 50 epochs, which is a very small improvement. Adapting the initial model (Model 1) to predict the training and checking data yields RMSE values of 5.68% and 5.8%, respectively, which are considered to be excellent values. The resulting initial and final MF had no significant positive effects on model prediction. For NF Model 1, the initial and final MF shapes were identical. The following model parameters were selected: MF number = [4 2 3], the MF type was triangular, and the number of epochs was 500. The initial and final MF shapes for
Model generality was checked by predicting the Group 2 data and Table 4, which were not used for training. NF Model 1 predicted the data with an overall RMSE of 8.35%. The lowest RMSE was 4.27% for the subgroup with
Bragg et al.’s data 23 (Table 5) were predicted using NF Model 1. The RMSE for all of Bragg et al.’s data (Table 5) was high (43.47%), and a model particularly optimized for Bragg et al.’s data (Model 3) was found, yielding an RMSE of 16.49%. The high RMSE was explained by the differences in the experimental procedures for both the experiments.22,23
Therefore, the best NF model, named the final model (Model 4), was set with the same parameters as those in Model 1. Implementing the NF Model 4 yielded an RMSE of 5.68% for Group 1/Table 3 training data and 8.35% for Group 2/Table 4. comparison with the semi-empirical method
36
revealed NF modeling for all data groups except for the 0°−60°
Conclusion
In this study, an NF model was developed to predict the normal force coefficient with an overall root mean square error (RMSE) of less than 6% for angles of attack (α) ranging from 0° to 90° and less than 20% for the 0° to 60° range. The model can give even lower RMSE, but this may cause unnecessary increased model complexity. For instance, the optimal number of membership functions (MFs) was found to be four, suggesting that increasing complexity does not necessarily enhance performance significantly beyond the 6% RMSE. Data groups with input ranges matching those used for training exhibited lower RMSE. The model can be easily adapted to predict similar linear and nonlinear systems, including steady and unsteady aerodynamic coefficients. The accuracy of the model is significantly influenced by the number of membership functions (MFs) selected, though it shows lower sensitivity to the type of MF used. Once appropriate model parameters are chosen, the RMSE converges rapidly with a small number of epochs. Model accuracy is most affected by the rate of change in α and aspect ratio (AR), followed by α itself.
The NF models compared favorably with semi-empirical methods for an α range of 0° to 90°, but the semi-empirical method was more accurate for the 0° to 60° range. This discrepancy is likely because αmin and αmax were not included as model inputs, and only the 0° to 90° range was used to train the NF model. Enhancing the model involves increasing the size of the experimental dataset used for training and validation. For better modeling and prediction of unsteady aerodynamic loads across different α ranges, incorporating αmin and αmax as model inputs is necessary. Model accuracy depends on three key parameters: the number of MFs, the type of MF, and the number of epochs. With the correct parameters, the RMSE converges quickly with minimal epochs.
Training should encompass multiple α ranges, with data for at least five ranges used, including low to moderate (0°–30°), low to high (0°–60°), and low to extremely high (0°–90°), along with two other ranges with different minimum values. Future work should aim to improve the modeling of local hysteresis, particularly at angles above 30°, where nonlinearity is dominant. Additionally, the modeling procedure should be extended to predict all five unsteady aerodynamic coefficients, not just the normal force coefficient. While this study used the Sugeno scheme for NF modeling, further research should explore the Mamdani method.
The developed model gives evidence that neuro-fuzzy techniques are very valuable in modeling unsteady aerodynamic. However, future work will include additional machine learning teachings with more data obtained for other aircraft. Future work will include exploration of hybrid approaches including combining neuro-fuzzy techniques with other machine learning models. This will enhance the robustness and effectiveness of the model. Future work will also include more aerodynamic data relevant to other aircraft to further enhance the modeling process
Footnotes
Acknowledgements
We thank Rabdan Academy (RA) and Higher Colleges of Technology (HCT) for supporting this work.
Ethical considerations
This work did not involve humans or animals. Ethical approval was not required for this research.
Consent for publication
The corresponding author gave consent to participate in the publication of the identifiable details.
Author contributions
Aziz Almahadin collected the data for this work, carried out the conception and design, analyzed and interpreted the data, and drafted the manuscript. Mohammad Almajali supervised the study, revised the manuscript critically for intellectual content, participated in the design, and drafted the final version to be published. All authors read and approved the final draft and agree to be accountable for all aspects of the work.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
The data and materials supporting the results or analyses presented in this paper are available upon reasonable request.