
Abstract
Most studies on power generation systems have focused on individual components, leaving researchers without a comprehensive understanding of integrated systems. This study addresses this gap by developing a fully self-sufficient photovoltaic (PV) system for a 12 V autonomous mobile robot. We calculated the power and energy requirements of the robot to appropriately size the PV panel and designed a DC–DC buck converter. For energy storage, we used a Li-ion battery and a bidirectional current converter to manage the charging and discharging processes. To optimize performance, we implemented Maximum Power Point Tracking (MPPT) using a fuzzy logic-based control method. Simulation results demonstrate that the proposed fuzzy MPPT controller outperforms the classical P&O algorithm by achieving up to
Introduction
Mobile robots are indispensable across a wide range of industries, autonomously performing tasks in education, medicine, military operations, rescue missions, space exploration, and agriculture. Their importance became even more evident during the COVID-19 pandemic when their capabilities proved invaluable for critical operations.1,2 Rapid advancements in robotics technology, coupled with rising concerns regarding energy sustainability, have fueled efforts to develop independent energy systems for mobile robots. However, most mobile robots currently rely on conventional power sources such as batteries and fuel cells, which limit operational flexibility and raise significant sustainability challenges. Although practical, rechargeable batteries require frequent recharging, leading to increased downtime and reduced autonomy.
In contrast, renewable energy sources offer a clean and abundant alternative, making them a promising solution for ensuring uninterrupted robotic operation.3–5 Among these, solar energy is the most widely utilized and cost-effective option 6 Prior research has focused on addressing energy fluctuations in solar systems through power management strategies and Maximum Power Point Tracking (MPPT) techniques. Power management systems optimize energy transfer from solar panels to batteries and onboard components to ensure operational efficiency. For example, Mikołajczyk et al. 5 and Hou et al. 7 proposed systems that maximize battery life using low-power protocols and energy-saving mechanisms. Initial MPPT approaches, such as operating PV arrays at fixed voltages near the Maximum Power Point (MPP), lacked adaptability to dynamic environmental conditions. 8 Later studies categorized MPPT techniques into traditional, smart, enhanced, and hybrid methods.9,10
Early MPPT algorithms, notably Perturb and Observe (P&O) and Incremental Conductance (InCond), gained popularity for their simplicity and ease of implementation. However, they exhibit performance drawbacks, such as steady-state oscillations around the MPP, reducing overall energy efficiency. To mitigate these limitations, intelligent control techniques particularly fuzzy logic controllers (FLCs) have been introduced in the MPPT domain. Fuzzy logic offers a powerful framework for managing nonlinear behavior and uncertainty by evaluating “degrees of truth” instead of binary logic, enabling more nuanced and adaptive decision-making. 11 An adaptive fuzzy logic-based MPPT has demonstrated improved steady-state performance and robust tracking under sudden irradiance changes. 12 Similarly, fuzzy logic MPPT combined with InCond techniques showed superior static and dynamic responses, significantly increasing PV output power compared to classical methods.12,13 Beyond MPPT, fuzzy logic control has also been adopted in broader energy management contexts, such as hybrid PV-battery microgrids, to regulate battery charging/discharging and maintain bus voltage stability effectively.14,15
Despite its advantages, fuzzy logic control has certain well-documented drawbacks. The implementation of FLCs often involves considerable design complexity, as it depends heavily on expert-defined rules and fine-tuned membership functions, making them sensitive to system parameter variations and computationally intensive.8,16 Moreover, under rapidly fluctuating environmental conditions such as intermittent shading conventional fuzzy controllers without adaptive enhancements may exhibit suboptimal tracking and increased oscillations around the MPP.14,17 Nevertheless, fuzzy logic remains particularly advantageous for mobile robotic applications, where operational reliability and dynamic adaptability are crucial. In these contexts, the benefits of fuzzy control including reduced oscillations, improved convergence speed, and superior robustness under variable conditions justify its adoption, particularly when hybridized with classical methods such as P&O.
Alongside improvements at the controller level, researchers have increasingly focused on optimizing PV system integration and power management strategies. In grid-connected or microgrid environments, intelligent control schemes (such as Takagi–Sugeno fuzzy-based strategies for PV–battery DC microgrids) 14 have demonstrated superior flexibility and stability in the presence of renewable intermittency. 18 Similarly, recent advances in electric vehicle (EV) charging infrastructures employ fuzzy control combined with hybrid optimization algorithms to address challenges of low inertia and voltage instability in DC microgrids. For instance, a 2024 study proposed an intelligent microgrid controller using embedded fuzzy logic to smooth power fluctuations during fast EV charging, validated through hardware experiments. 17 These developments highlight broader trend modern PV systems (spanning microgrids, consumer electronics, vehicular systems, and now autonomous robotics) increasingly rely on hybrid intelligent control algorithms (e.g. fuzzy logic, neural networks, and metaheuristics) to achieve high energy efficiency and operational stability under dynamic conditions.19,20 The study 21 introduced a Modified Adaptive Jaya Optimization (MAJO) algorithm for maximum power point tracking, demonstrating superior performance over conventional deterministic and swarm-based MPPT methods—especially in partial shading scenarios, where accurate tracking is most challenging.
Despite these technological advancements, a significant gap remains in the literature regarding photovoltaic-powered autonomous mobile robots. Unlike existing fuzzy-based MPPT schemes that are often designed for static or grid-tied PV systems, our approach is applied for dynamic conditions and embedded operation in fully autonomous mobile robots, offering real-time adaptability with minimal computational burden. In contrast to prior works, the present study proposes a fuzzy logic-enhanced P&O MPPT specifically performed for a 12 V autonomous mobile robot.
This contribution distinguishes itself by integrating intelligent control directly into the robot’s power management system, achieving enhanced dynamic response allowing the MPPT to rapidly adapt to irradiance fluctuations caused by robot movement while significantly reducing steady-state oscillations around the MPP. These improvements translate into higher energy conversion efficiency and a more reliable power supply, critical for sustained robot operation. Therefore, this research extends the current state of the art by demonstrating a robust, hybrid MPPT solution capable of sustaining efficient mobile robotic operation under realistic and variable environmental conditions.
We present a fully autonomous 12 V photovoltaic power system for the mobile robot, including optimal PV panel sizing, a custom DC–DC buck converter, and a Li-ion battery with a bidirectional converter for charge management. This holistic design ensures efficient energy harvesting and reliable power storage for continuous robot operation, in contrast to previous studies that optimize these components in isolation.
Moreover, the proposed hybrid system is rigorously evaluated under diverse environmental conditions (e.g. varying solar irradiance, temperature, and load) using MATLAB/Simulink simulations. The results demonstrate that our fuzzy-P&O controller maintains high tracking efficiency and system stability across dynamic scenarios, where classical MPPT methods often struggle. This validates the controller’s robustness in real-world operating conditions for mobile robots.
The remainder of this paper is organized as follows. The system design and synoptic diagram are outlined, followed by a discussion of the characterization and modeling of the solar power system of the robot. Next, the optimization of the photovoltaic system is explored, and the results are presented and discussed. This paper concludes with a comparative analysis.
Despite significant progress in individual aspects of PV energy systems, few studies have addressed the comprehensive integration, control, and validation of a fully autonomous PV-battery power supply specifically tailored for mobile robots. To address these challenges and bridge the gap in current research, the main contributions of this work are summarized as follows:
System design
This study comprehensively examines the design, optimization, and performance evaluation of a standalone power system powered by renewable energy, specifically designed for a 12 V mobile robot. 21 It focuses on critical components, such as PV panel sizing, DC/DC buck converter design, battery selection, and control strategies for efficient battery charging and discharging. A synoptic diagram of the system is illustrated in Figure 1.
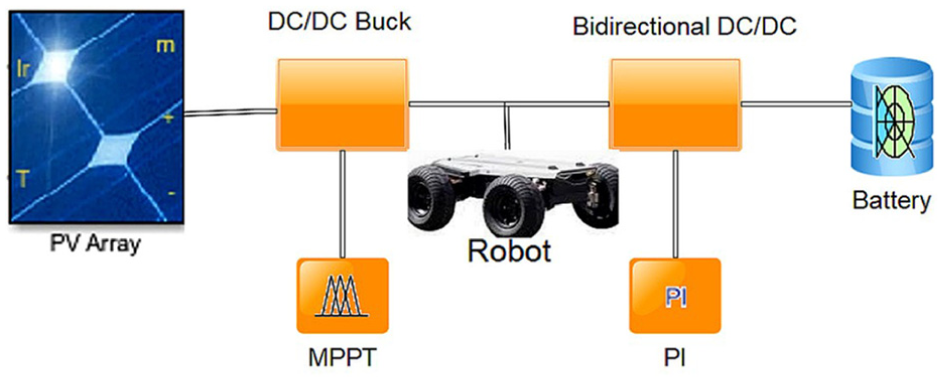
Synoptic diagram.
Our mobile robot operates using a solar panel with a DC/DC buck converter, efficiently stepping down the high voltage from the panel to the robot’s operating voltage of 12 V. This is achieved through pulse-width modulation (PWM), which rapidly switches the input voltage on and off. By adjusting the duty cycle of the PWM signal, the converter precisely regulates the output voltage while minimizing power losses.
To ensure maximum power output from the solar panel under varying sunlight conditions, we integrated Maximum Power Point Tracking (MPPT) technology. This system continuously adjusts the operating point of the panel to deliver the maximum possible power based on the current sunlight intensity. The robot relies on a lithium-ion battery for operation during cloudy weather or at night.
A bidirectional current transformer manages the battery, enabling both charging and discharging. This transformer efficiently facilitates power transfer between the solar panel, battery, and robot. To maintain a consistent power supply regardless of the weather conditions, a proportional-integral (PI) controller oversees the operation of the two MOSFETs within the bidirectional converter. This always ensures stable and reliable power delivery.
Sizing the PV power system for the mobile robot
The primary advantage of photovoltaic (PV) energy is its ability to generate electricity anywhere on Earth, provided sunlight is available. However, the proper sizing of the PV panel is crucial to meet specific electrical requirements and ensure maximum system efficiency. The sizing of a system involves determining the parameters of its physical components based on well-defined specifications. A PV module, consisting of an array of solar cells, generates direct current (DC), and the combination of multiple modules forms a PV panel. This assembly can be configured in various ways to match the characteristics of the load equipment.
The size of the PV panel plays a key role in evaluating the actual energy consumption of the load. This process typically depends on several factors such as the desired energy output, geographical location, angle, and tilt of the panel. For fixed installations, where the load is constant and well-defined, the sizing is relatively straightforward. However, this process is more complex in mobile systems. These challenges include estimating the energy requirements of the system and accommodating the panel within the physical constraints of the mobile platform.
To appropriately size the PV panel to power the mobile robot, it is necessary to calculate both the power and the energy required for its propulsion. This approach ensures that the robot operates efficiently, while maintaining its mobility and adaptability.
Power and energy required for the mobile robot
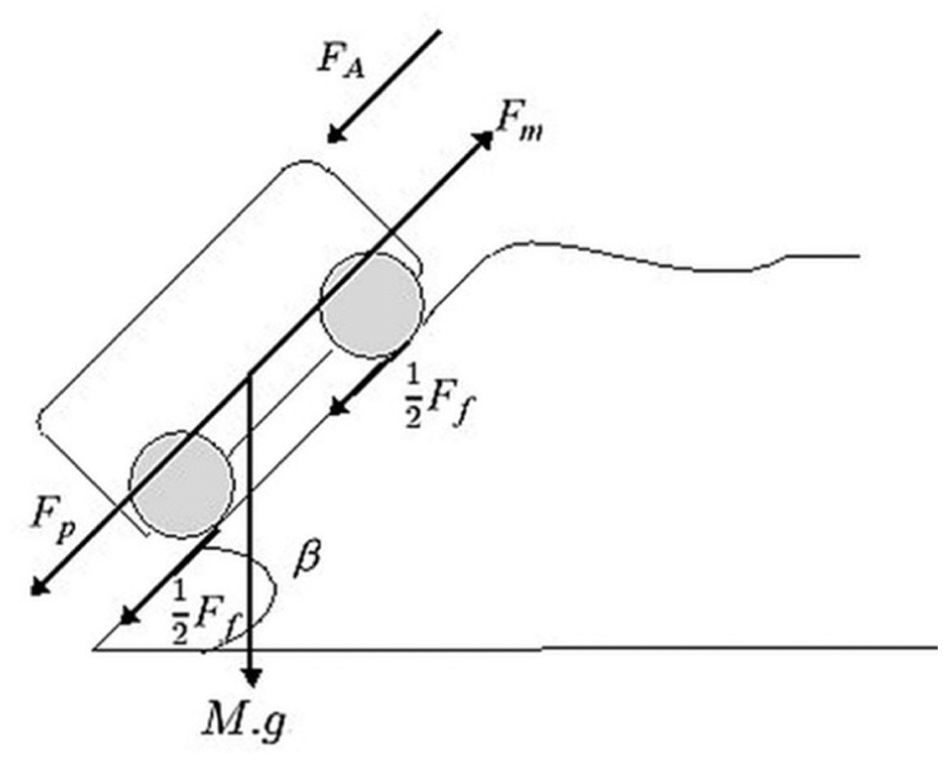
Various forces influence the energy consumption of mobile robots; therefore, it is essential to use an energy calculator to account for and overcome these forces. The propulsion power required for the robot must counteract frictional forces arising from gravity, aerodynamic drag, and rolling resistance. These forces are depicted in Figure 2, which illustrates their impact on the energy demand of the robot.
System voltage and harmonic content.
The motion of the robot follows Newton’s law, which states that the sum of the forces acting on it is equal to the product of its mass and acceleration, as shown in (1).

According to Newton’s second law, the term M.a represents the resultant force acting on the robot, which is the vector sum of all the forces applied to it. This resultant force dictates the acceleration or deceleration of the robot depending on its direction and magnitude. When the forces are projected onto the axis of motion, the traction force

When the robot climbs a slope, the friction force

The aerodynamic resistance force

The slope force

By summing these components, we determine the total driving force required to overcome all resistive forces and achieve the desired acceleration or deceleration along the direction of motion. This equation provides a comprehensive framework for analyzing and understanding the dynamics of the robot’s motion.
When the acceleration is positive, the robot is in an acceleration phase, resulting in an increase in speed. Conversely, a negative acceleration value indicates a deceleration phase, during which the robot’s speed decreases.
Additionally, the power of the robot at a given velocity is defined as the product of the traction force

Thus, the power of the mass at a given velocity can be expressed using (7).

Here,

The total energy consumption is determined by the robot’s power and speed, scaled by its autonomy. This reflects the energy required to propel the robot over a specific distance or duration at a given velocity, accounting for its operational autonomy. The term
Sizing of the PV panel
To determine the size of the PV panel for our robot, we first calculated the daily electrical consumption, as previously mentioned. After obtaining the daily energy requirements in watt-hours (
Model of a PV cell
A PV cell can be modeled using an equivalent circuit that characterizes its electrical behavior. The most widely used model is the equivalent diode model, which includes a photoelectric current source (representing the current generated by sunlight) in parallel with a diode. To account for electrical losses in the cell, this model was extended by adding series and parallel resistance.22,23 The equivalent circuit of the single-diode model is represented in Figure 3.
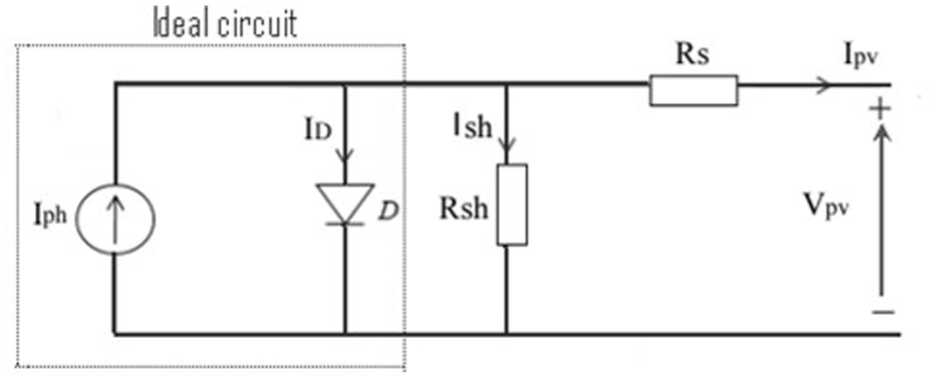
Equivalent model of the PV cell.
By applying Kirchhoff’s law, the output current of the cell can be expressed by (9)24,25:

Where

The current flowing through the parallel resistance (

This equation indicates that the parallel resistance current depends on the voltage across the cell (V), the total cell current (I), the series resistance (

The reverse saturation current (

Based on the parameters, the output current of the PV cell was computed according to (14).

Equation (14) represents the current-voltage characteristics of the PV cell, which is the fundamental component of the PV solar panels. These semiconductor devices, typically made of silicon, generate a voltage that can range from 0.3 to 0.7 V, depending on factors such as the material used, configuration, temperature, and cell aging. A PV module is composed of multiple cells connected in series (

The shunt resistance

Sizing DC/DC buck converters
The Buck converter used in this study is a step-down DC–DC converter employed to reduce the DC input voltage to a lower DC output voltage. The duty cycle of the buck converter is given by (17).

The equivalent resistance is given by (18).

The inductance

With
Adding a safety margin of 20%, we choose
The capacitor

With
Adding a safety margin, we choose
For the capacitor

With
Adding a safety margin, we choose
Buck converter specifications.
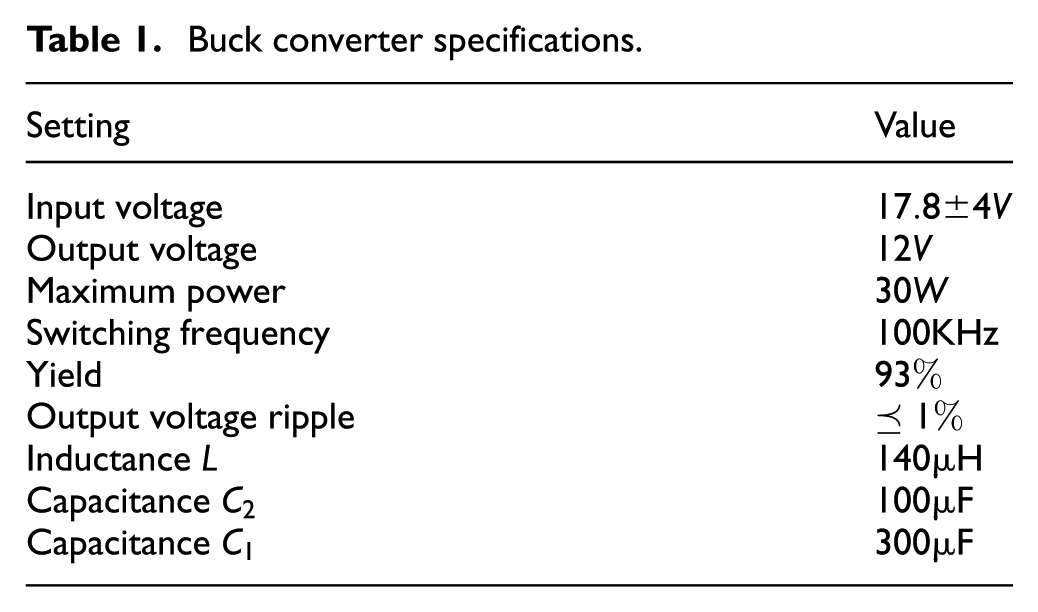
These specifications allow for the design of an efficient buck converter for our application and provide a stable output voltage of 12 V to power our robot.
Battery design for the mobile robot
Batteries play a crucial role in storing the collected solar energy, ensuring continuous operation of the robot even when solar energy is unavailable (e.g. at night or during cloudy weather). Efficient energy storage systems such as lithium-ion batteries are ideal for providing extended autonomy to robots. 26 These batteries are widely used in solar applications and autonomous robots owing to their high energy density, long lifespan, low self-discharge rate, and fast charging capabilities.27,28 By enhancing autonomy and ensuring a continuous energy supply, the robot can operate reliably and efficiently throughout its working cycle, even under varying weather conditions.
Control of the battery charging and discharging
To ensure the optimal performance of our system, we require a control system that manages the battery-charging and discharging processes.
Bidirectional current converter
To charge or discharge the battery, a change in the direction of the energy flow is associated with a change in the current direction, while the voltage remains constant. Thus, the converter used to recharge the battery is a bidirectional-current converter. It has a dual purpose: it can either power the robot with solar energy or with the energy stored in the battery. The duty cycle
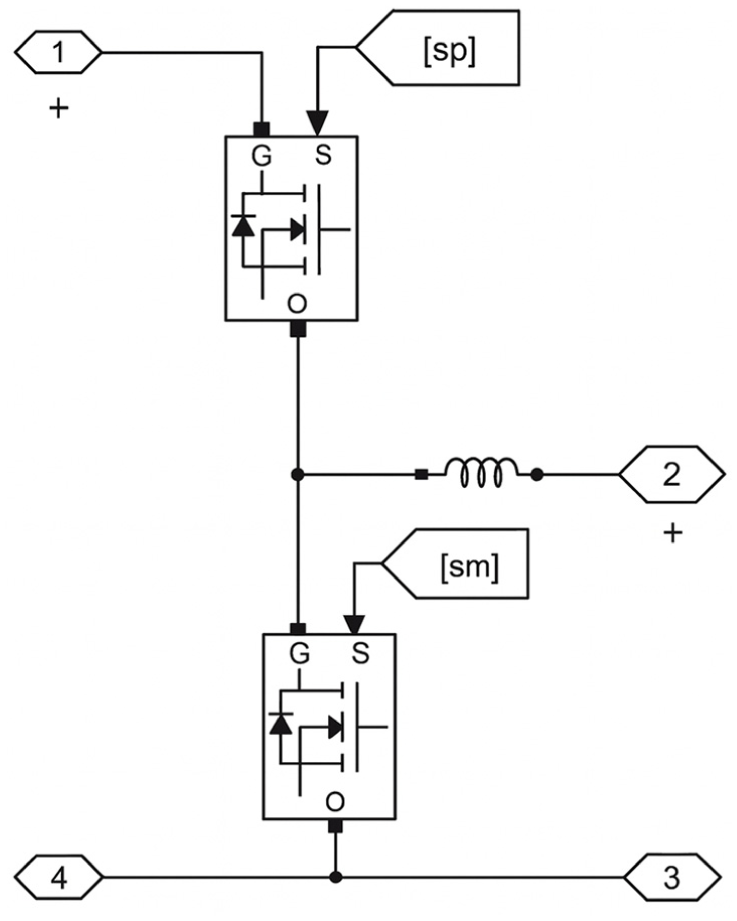
Bidirectional current converter.
To control the two MOSFETs of the bidirectional converter and ensure a stable power supply for the robot (
State of charge and discharge of the battery
Using the SimpowerSystems toolbox in MATLAB, we conducted two tests, discharge and charge. Figure 5(a) depicts the discharge state, while Figure 5(b) shows the charge state of the battery.
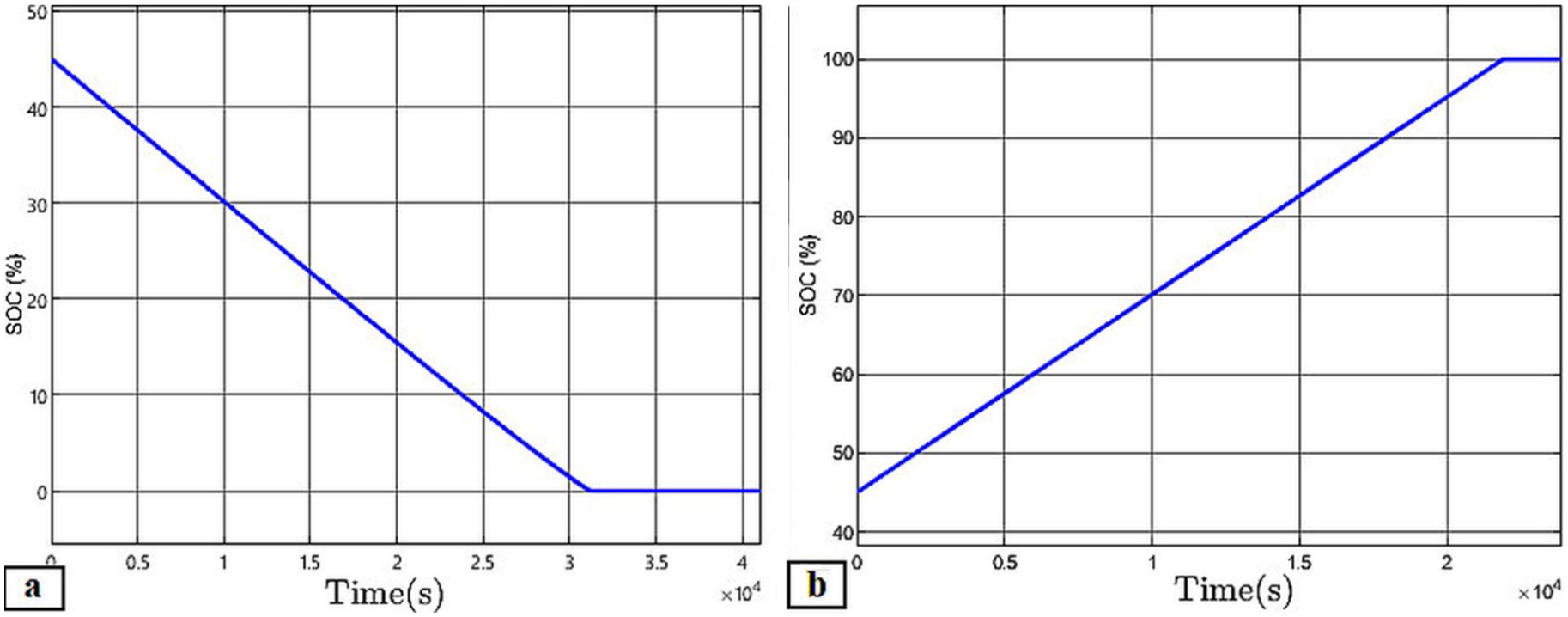
State of charge and discharge of the battery: (a) battery discharge from 45% to 0% and (b) battery charge from 45% to 100%.
It should be noted that the battery discharged from 45% to 0% over 30,000 s, approximately 8 h. Conversely, the battery charge reached 100% after 20,000 s, which is approximately 5 h.
A lithium-ion (Li-ion) battery was selected for the simulation due to its high energy density, long cycle life, low self-discharge rate, and widespread use in mobile robotics and embedded systems. Compared to alternatives like lead-acid or nickel-metal hydride (NiMH), Li-ion offers superior efficiency and reduced weight both critical for autonomous robotic platforms. This choice aligns with current industrial and academic trends in mobile energy storage.
MPPT algorithm
The concept of the maximum power point (MPP) in PV systems is essential for optimizing energy generation. This refers to the point at which the solar panel operates at peak efficiency, delivering the maximum power output for a given set of conditions. To ensure that PV systems operate at this optimal point and maximize energy production, various Maximum Power Point Tracking (MPPT) algorithms have been used. In literature, different types of algorithms such as the Constant Current Algorithm, Constant Voltage Algorithm (CV), Incremental Conductance Algorithm (IncCond), and Perturb and Observe Algorithm (P&O) 29 are commonly employed. These algorithms adjust the operating parameters of the PV system, such as the voltage or current, to continuously search for and maintain the MPP, ensuring that the system extracts the maximum available power from the solar panels. In this study, we used the Perturb and Observe (P&O) method.
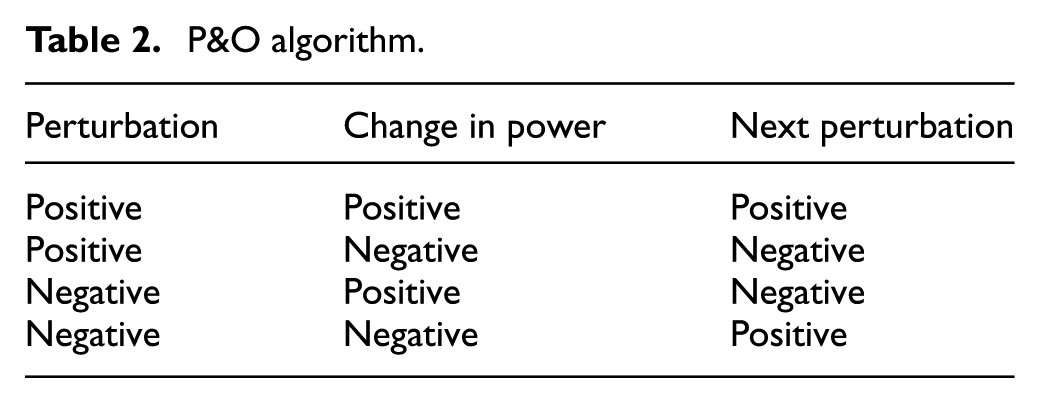
Perturbation and Observation (P&O) algorithm
The Perturbation and Observation (P&O) method is a widely used MPPT algorithm for PV systems. It is known for its simplicity and effectiveness, as it does not require prior knowledge of the PV panel’s characteristics. This method works by perturbing the system and observing its effect on power. It only requires measurements of the voltage (
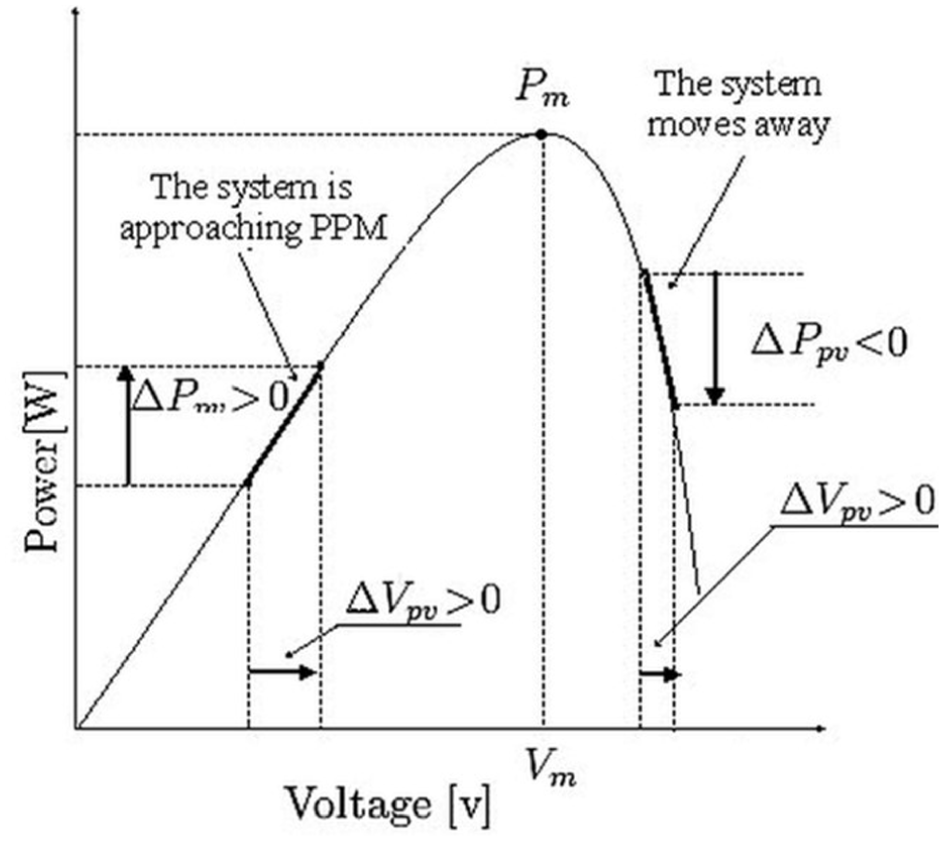
Operating principle of the P&O MPPT algorithm.
As shown, if the operating voltage is perturbed in each direction and the power increases (p > 0), the perturbation moves the operating point closer to the MPP. The P&O algorithm continues to perturb the voltage in the same direction and adjusts the operating point until the MPP is reached. However, if the power decreases (p < 0), the perturbation moves the operating point away from MPP. In this case, the algorithm reverses the direction of the next perturbation, as shown in Table 2.
P&O algorithm.
A flowchart of the P&O method is presented in Figure 7, 30 illustrating the process of analyzing power evolution after each voltage perturbation. This control method typically requires two sensors: one to measure the voltage and another to measure the current, allowing for the determination of PV power at each moment.
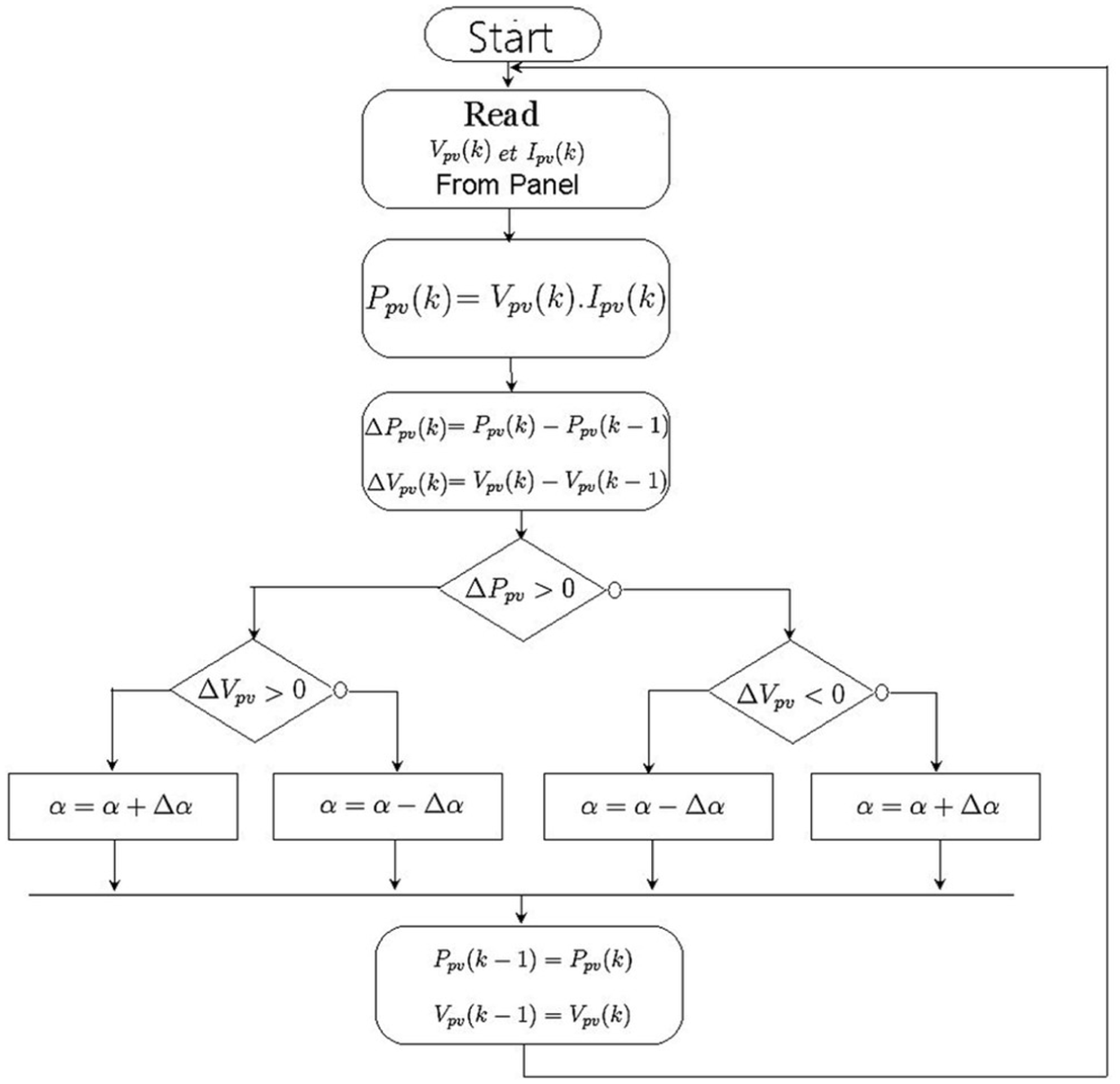
Flowchart of the perturb and observe (P&O) method.
Optimization of the perturbation and observation method by fuzzy logic
In this study, a fuzzy-logic controller was developed to enhance the accuracy and efficiency of the MPPT in our PV system. This approach addresses the limitations of the basic P&O method, including its slow response to changing environmental conditions and the oscillations around the Maximum Power Point (MPP). 30
Fuzzy logic controller
The functional diagram of our fuzzy logic controller (FLC) includes three parts (fuzzification, inference based on rules, and defuzzification), as shown in Figure 8.
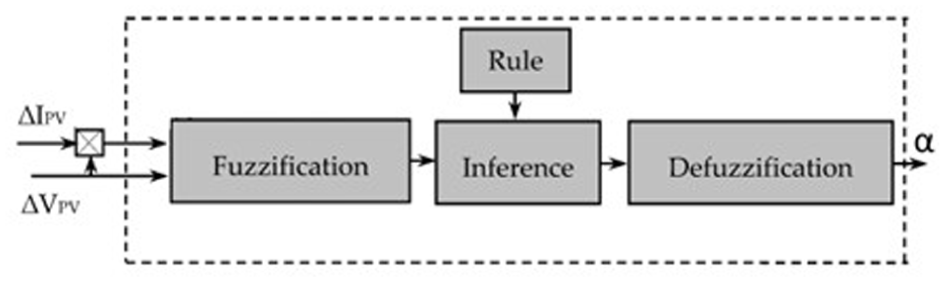
Diagram of a fuzzy logic controller.
The reasoning behind the chosen fuzzy-logic control approach is based on the relationship between the last change in the control signal

The power variation values
In this model, the membership functions of the output and input variables, as presented in Figure 9, use triangular functions. Six linguistic terms are defined: three for the input (N for negative, Z for zero, and P for positive) and three for the output (S for small, M for medium, and B for big).
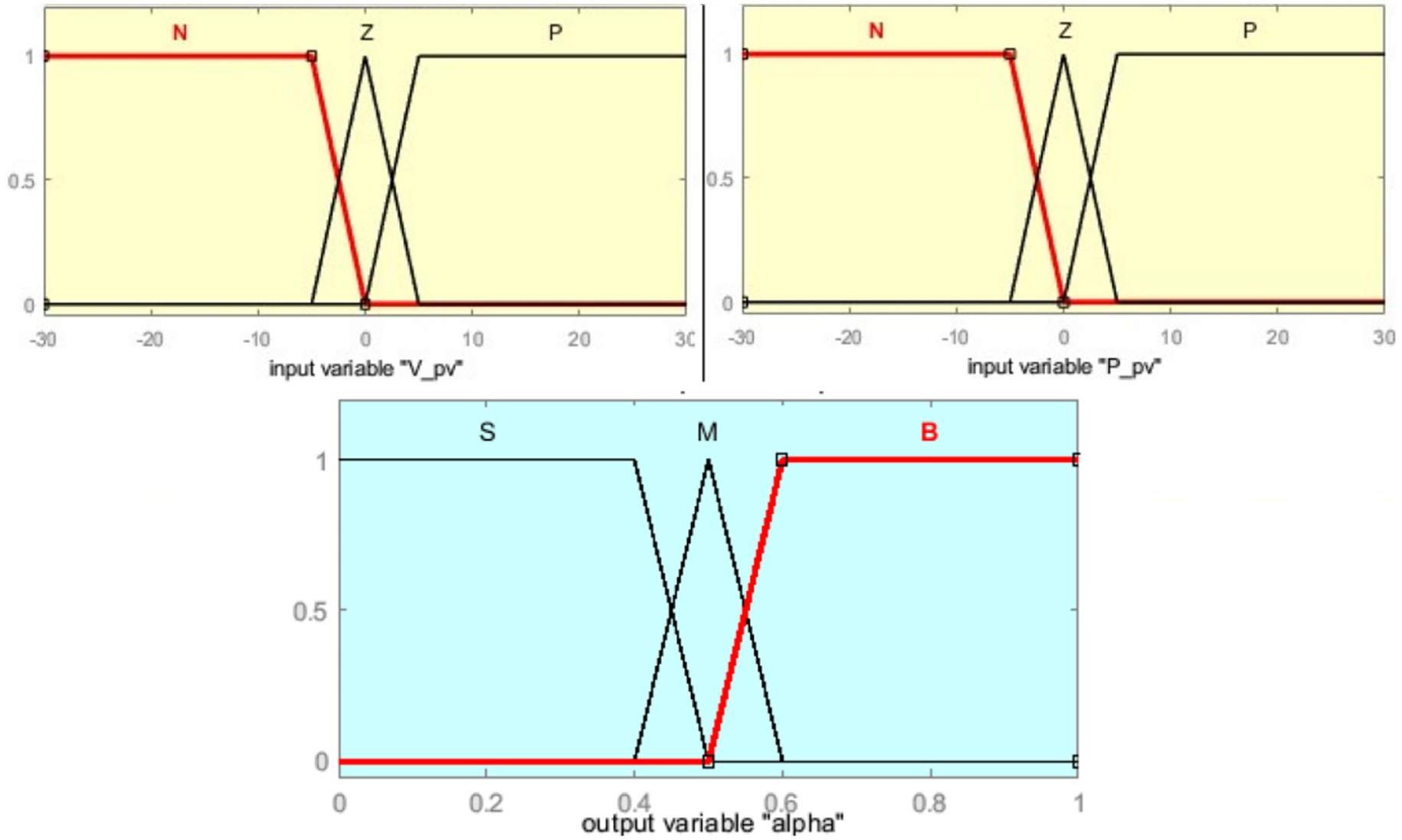
Membership functions of the input variables, and the output variable alpha.
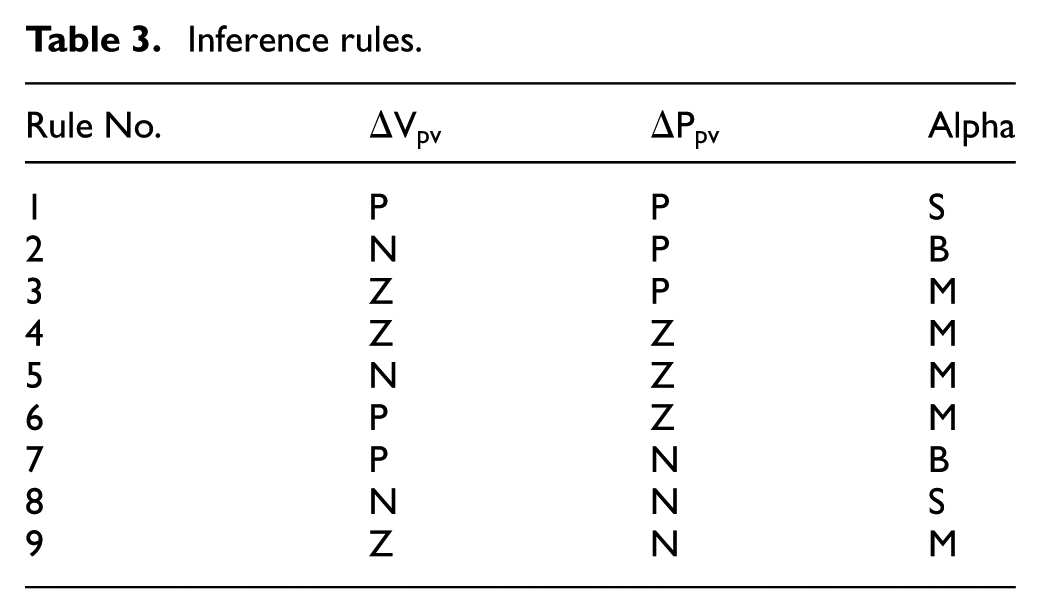
In the context of fuzzy logic control methods for MPPT in PV systems, the fuzzy rule base is a set of if-then rules that dictate the system’s behavior. These rules are designed based on professional expertise and the operational characteristics of the control system. Each rule in the fuzzy rule base consists of an if-part (antecedent), which defines conditions based on the input variables, and a then-part (consequent), which specifies the corresponding output control action. The rules of inference for this controller are summarized in Table 3.
Inference rules.
The output of a fuzzy controller is always a fuzzy set, which necessitates a defuzzification process to produce a crisp output for the proposed fuzzy control system. Various defuzzification techniques have been suggested in the literature. Among these, the most commonly used method is the center of gravity or centroid method.32,33 This technique calculates the center of gravity of the fuzzy set and uses its value as the output of the fuzzy logic controller (FLC). In this study, the single output variable is the duty cycle
Results and discussion
To validate the proposed fuzzy-P&O MPPT controller across realistic operating conditions, we evaluated system performance under multiple representative case scenarios. These include: (i) steady-state operation under full irradiance, (ii) dynamic irradiance fluctuations simulating cloud cover transitions, (iii) low irradiance conditions reflecting evening or shaded environments, and (iv) variable temperature conditions. In all cases, the fuzzy controller consistently tracked the maximum power point faster and with reduced oscillation compared to the classical P&O method. These scenarios reflect typical challenges faced by autonomous mobile robots operating outdoors, where weather variability and changing light angles are common.
Figures 10(a) and 11(a) illustrate the simulation results of the classic P&O algorithm, a traditional method for MPPT in PV systems. The power curves depict the relationship between the power output of the PV system and constant illumination levels (
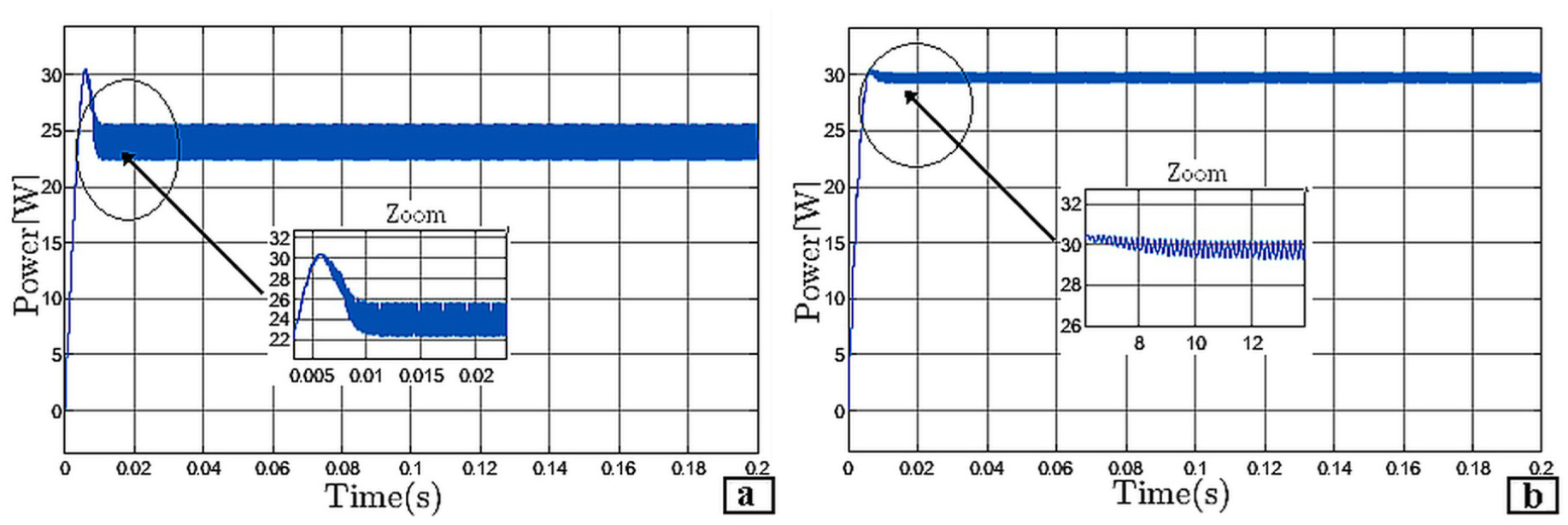
Comparison of output power behavior under fixed climatic conditions: (a) classic P&O algorithm and (b) fuzzy logic-enhanced P&O algorithm.
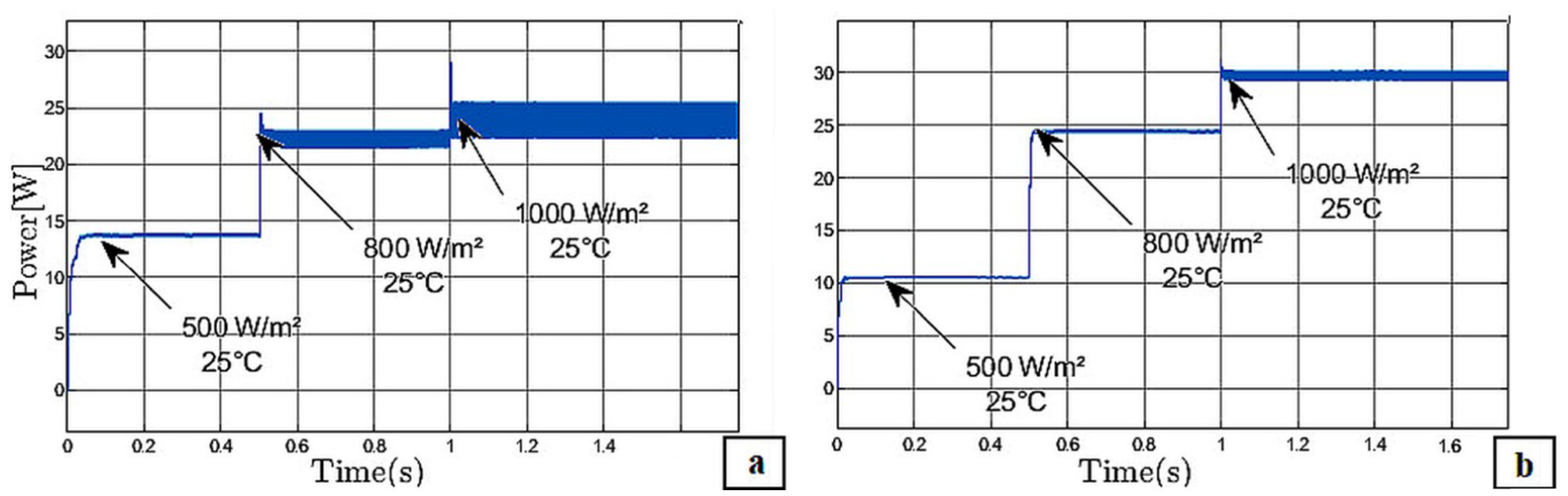
Output power response under variable irradiance conditions at constant temperature (25°C): (a) classic P&O algorithm and (b) fuzzy logic-enhanced P&O algorithm.
Figures 10(b) and 11(b) present the simulation results of the P&O algorithm optimized using a fuzzy logic controller. By incorporating linguistic rules and fuzzy sets, the fuzzy logic controller addresses uncertainties and imprecisions in the MPPT process, thereby enhancing the performance of the P&O algorithm. The power curves in Figure 10(b) show the relationship between the power output and constant illumination levels (
In both steady-state and dynamic irradiance conditions, the fuzzy controller exhibits markedly higher efficiency, faster response, and greater stability than the classical approach. A detailed comparison of the methods is provided in Table 4, highlighting the key performance metrics and showcasing the advantages of our approach in terms of efficiency, adaptability, and stability under varying environmental conditions.
Comparison between the classical P&O algorithm and our fuzzy-optimized P&O.
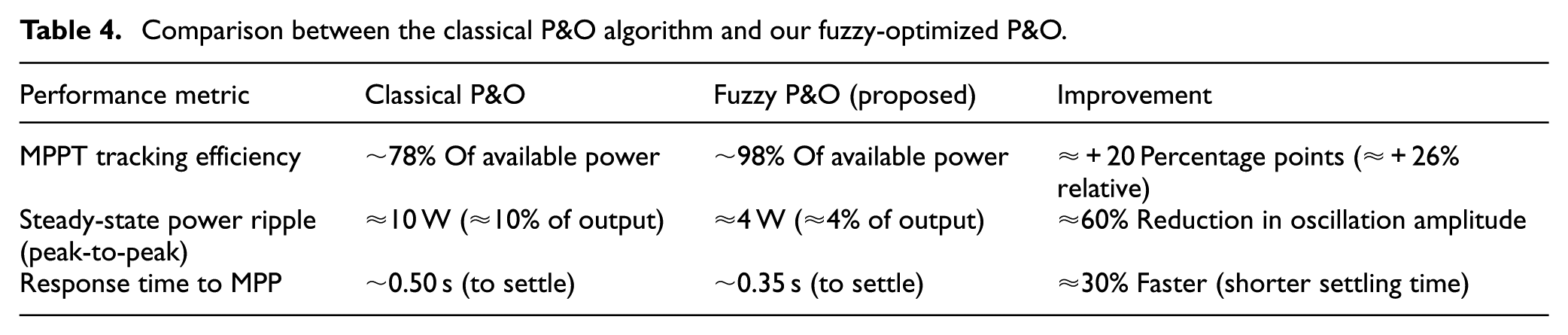
The fuzzy logic-optimized controller consistently achieves a much higher tracking efficiency than the classical P&O. For example, under standard test conditions (1000 W/m2, 25°C), the fuzzy controller harvested approximately 98% of the available PV power, whereas the classical P&O captured only about 78%–80%. This corresponds to roughly a 20+ percentage point increase in absolute efficiency (approximately 25% more energy captured relative to the classical method). The superior efficiency of the fuzzy controller is attributed to its ability to minimize deviations from the true MPP. In steady-state operation at fixed irradiance, the classical P&O tends to oscillate around the MPP, causing the operating point to wander and average out at a lower power output. By contrast, the fuzzy-enhanced P&O quickly fine-tunes the duty cycle with adaptive step sizes, virtually eliminating any sustained deviation from the MPP. As a result, the fuzzy controller delivers near-optimal power to the load consistently, even under conditions where the conventional algorithm would suffer tracking losses.
On the other side, the fuzzy controller also greatly improves the stability of the PV output by suppressing oscillations around the MPP. The classical P&O exhibited noticeable power and voltage ripple in both the fixed and variable irradiance tests. In the simulations, the conventional algorithm’s output oscillated with a peak-to-peak amplitude of up to about 10 W (approximately 10% of the 100 W panel capacity in our test scenario). These oscillations indicate wasted energy and increased stress on the power electronics. In sharp contrast, the fuzzy logic-optimized P&O reduced the ripple by well over 50%, limiting the peak-to-peak power fluctuation to roughly 4 W (about 4% of output). This ∼60% reduction in steady-state ripple reflects the fuzzy controller’s better adaptability: it intelligently decreases perturbation step size as the operating point nears the MPP, avoiding the continuous hunting behavior inherent to the fixed-step P&O. Consequently, the PV output with fuzzy MPPT is much smoother and more stable. The reduction in oscillatory behavior not only means higher average power (contributing to the efficiency gains noted above) but also implies less voltage stress and more stable operating conditions for the downstream hardware and the robot’s electrical system.
Moreover, the fuzzy MPPT controller demonstrates a faster response to changing environmental conditions, improving the system’s adaptability to irradiance transients. When the irradiation level was varied (as shown in Figure 11, with steps from 500 to 800 to 1000 W/m2), the classical P&O controller showed a noticeable delay in reaching the new MPP after each change, and its power output exhibited overshoot and undershoot around the transitions. Quantitatively, the conventional P&O required on the order of 0.5 s to settle to the new steady state after a large irradiance step. In contrast, the fuzzy-enhanced controller settled in approximately 0.35 s under the same conditions. This represents roughly a 30% reduction in settling time. The improved transient response is due to the fuzzy controller’s adaptive step size adjustment: it accelerates the perturbation step when a large change in conditions is detected, allowing it to swiftly climb toward the new MPP, then refines the step size to avoid overshooting the peak. The outcome is a faster tracking of the MPP with minimal overshoot, which means the system spends less time in suboptimal operating states during irradiance transitions. This rapid convergence is crucial for maintaining high energy capture when sunlight conditions fluctuate, as it reduces the energy lost during the tracking process by a significant margin.
The simulation model depicted in Figure 12 represents a comprehensive standalone power system designed to independently provide a reliable energy supply.
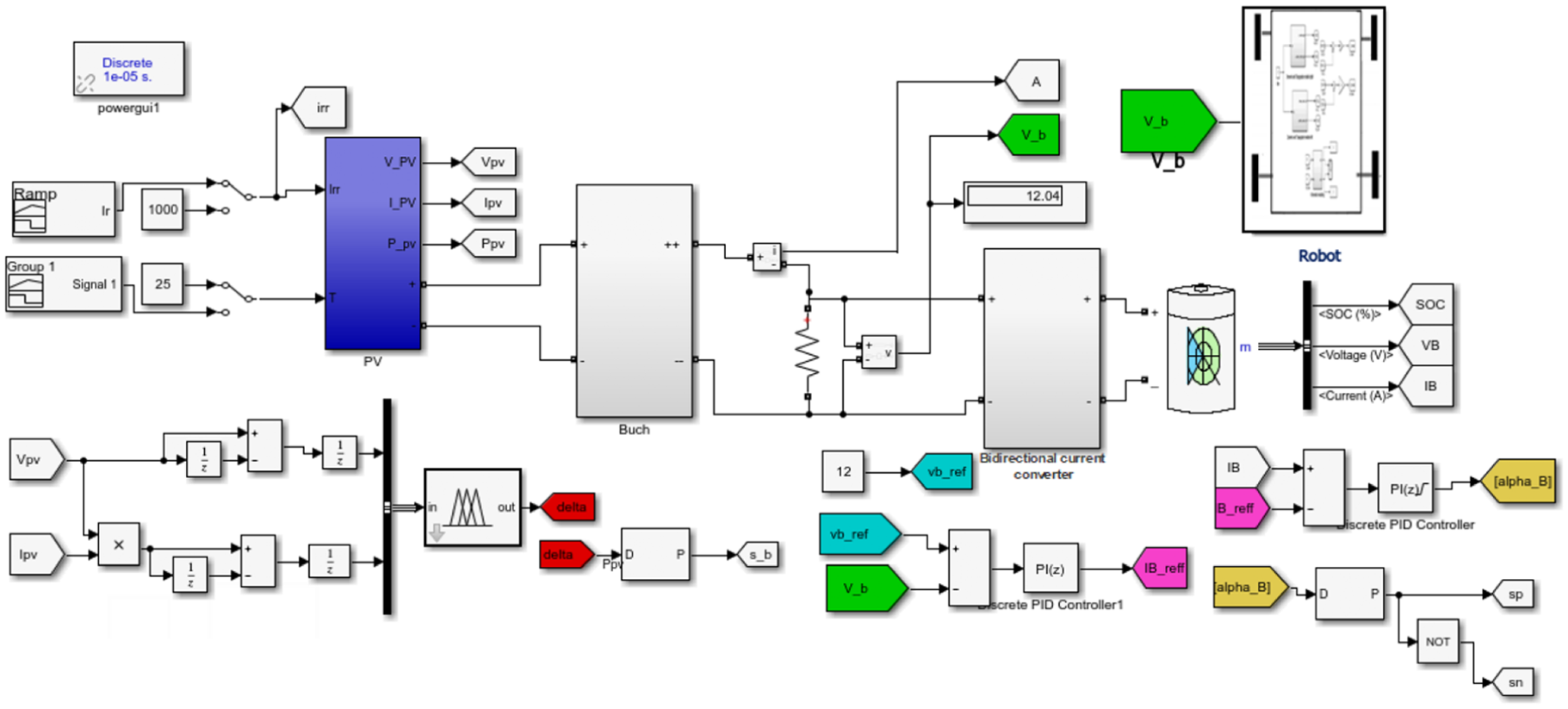
Complete simulation system.
A detailed analysis reveals key insights into the system’s behavior under varying radiation conditions, as illustrated in Figure 13. The voltage at the load terminals (
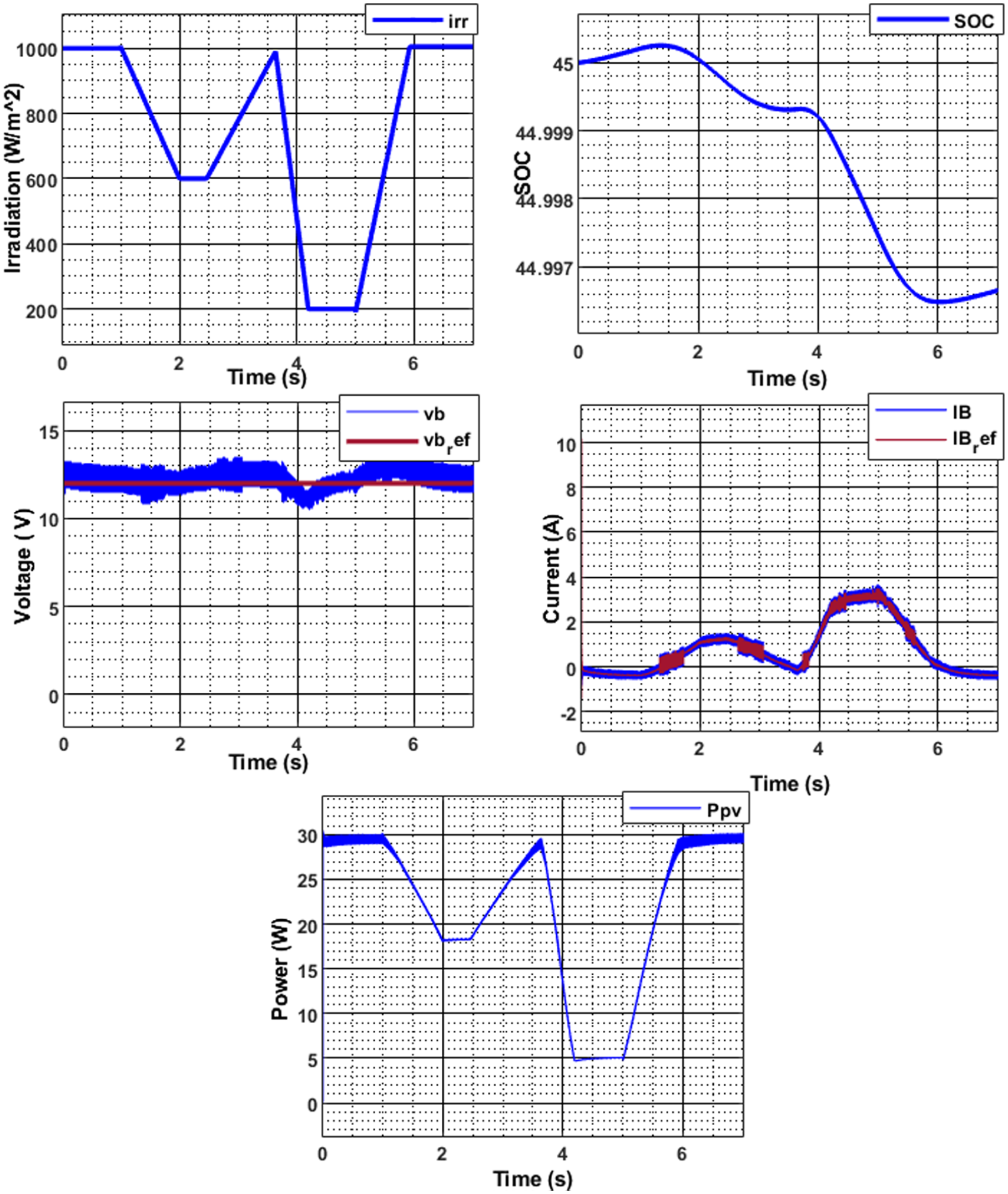
Simulation results of the complete standalone PV power system with variable irradiance.
A dynamic relationship is observed between the radiation levels and the reference current (
Under low-radiation conditions (e.g.
To examine the effect of temperature on the system, a constant radiation level of
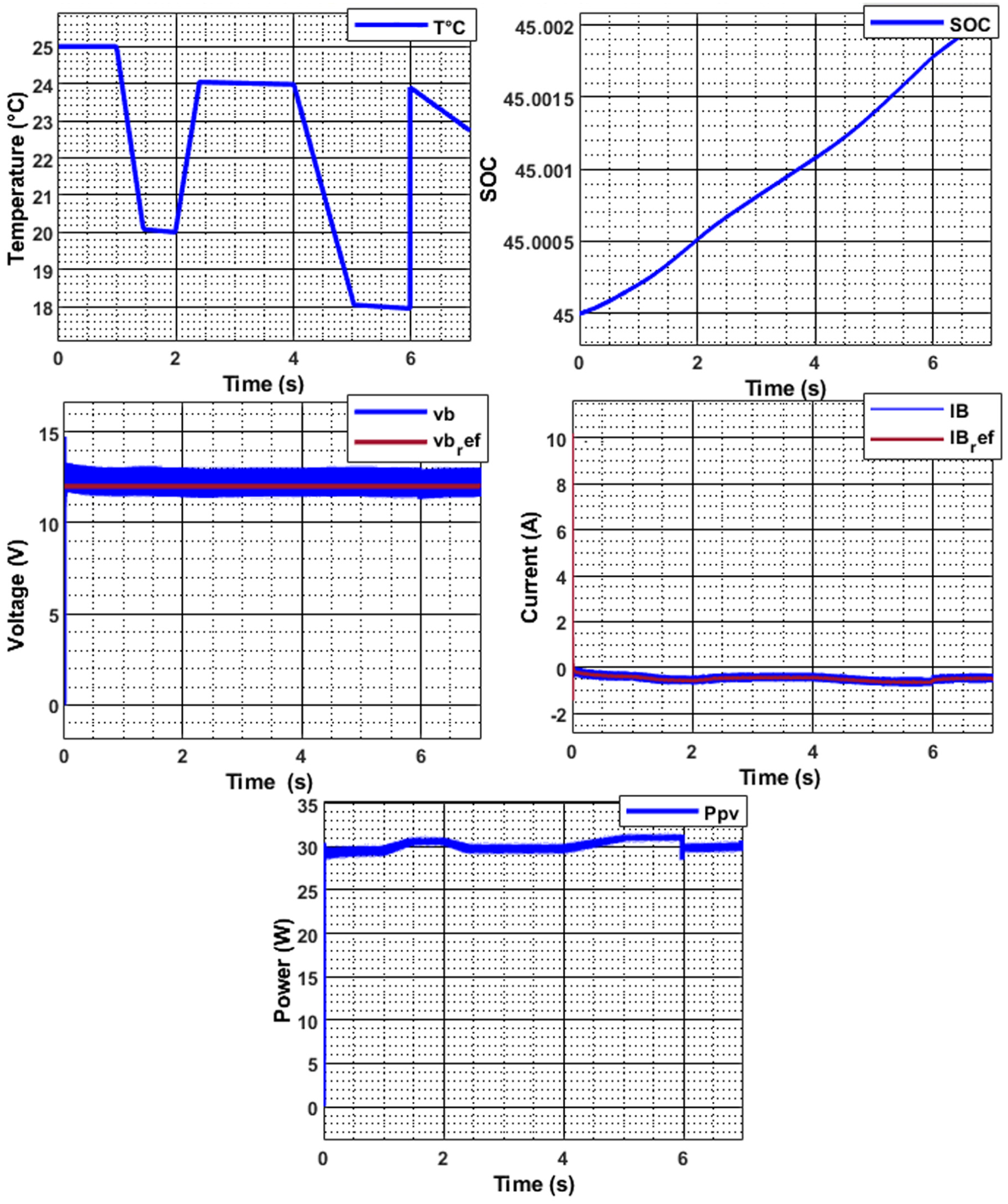
Simulation results of the complete standalone PV power system with variable temperature.
Additionally, the battery stayed in a charging state throughout the temperature variations, indicating that these fluctuations did not significantly affect the battery’s charging behavior. A slight impact of temperature on the power output was observed, suggesting that temperature changes had a limited effect on the system’s overall performance. This analysis underscores the system’s stability and resilience under varying thermal conditions
The fuzzy logic-enhanced P&O MPPT controller provides substantial improvements over the classical P&O method for 12 V solar-powered mobile robots, including 20%–25% higher power extraction, a 50% reduction in steady-state power ripple, and ∼30% faster response to irradiance changes. These enhancements translate to more stable, reliable power for both the battery and the robot, maximizing available solar energy under optimal and fluctuating conditions, and enabling sustained autonomous operation.
Crucially, comprehensive simulations confirm the stability of the proposed controller across all tested scenarios, including rapid irradiance changes, temperature fluctuations, and load variations. As evidenced in Figures 10–14, the system’s voltage, current, and power all converge quickly after disturbances, with no sustained oscillations, overshoot, or instability. Voltage regulation is consistently maintained within ±1% of the 12 V setpoint. The reduction in power ripple by over 50% further demonstrates superior damping and oscillation suppression relative to the classical P&O. The adaptive fuzzy controller reliably prevents limit cycles or hunting behavior and ensures bounded-input, bounded-output (BIBO) stability, with no performance degradation or divergence observed throughout all simulation scenarios. This confirms that the system remains robust and predictable, providing high performance and resilience even in the face of environmental disturbances.
Comparative study
A review of recent MPPT studies published between 2024 and 2025 including, PSO/metaheuristics, hybrid intelligent controllers, and classical approaches demonstrates that the proposed fuzzy logic-enhanced P&O controller achieves superior performance in efficiency, stability, and convergence speed. Conventional methods such as P&O and Incremental Conductance achieve only about 85%–88% tracking efficiency under challenging conditions, with greater oscillations at steady state. 34 ANN-based MPPT approaches may reach 98.16% efficiency, but typically require longer tracking times (e.g. 1.3 s), while metaheuristic strategies such as DA, GOA, and MFOA often fall below the 98% efficiency mark and can suffer from higher ripple or longer settling times.35,36 Even advanced hybrid controllers, including fuzzy logic combined with Incremental Conductance or deep reinforcement learning (DDPG), generally report lower efficiency (97.7% and 95%, respectively) or higher ripple.34,37 Table 5 summarizes other comparisons between 2018 and 2025, highlighting that our approach consistently delivers up to 98% MPPT efficiency, more than 50% reduction in power ripple, and approximately 30% faster convergence than the latest published alternatives.
Comparison of MPPT methods.
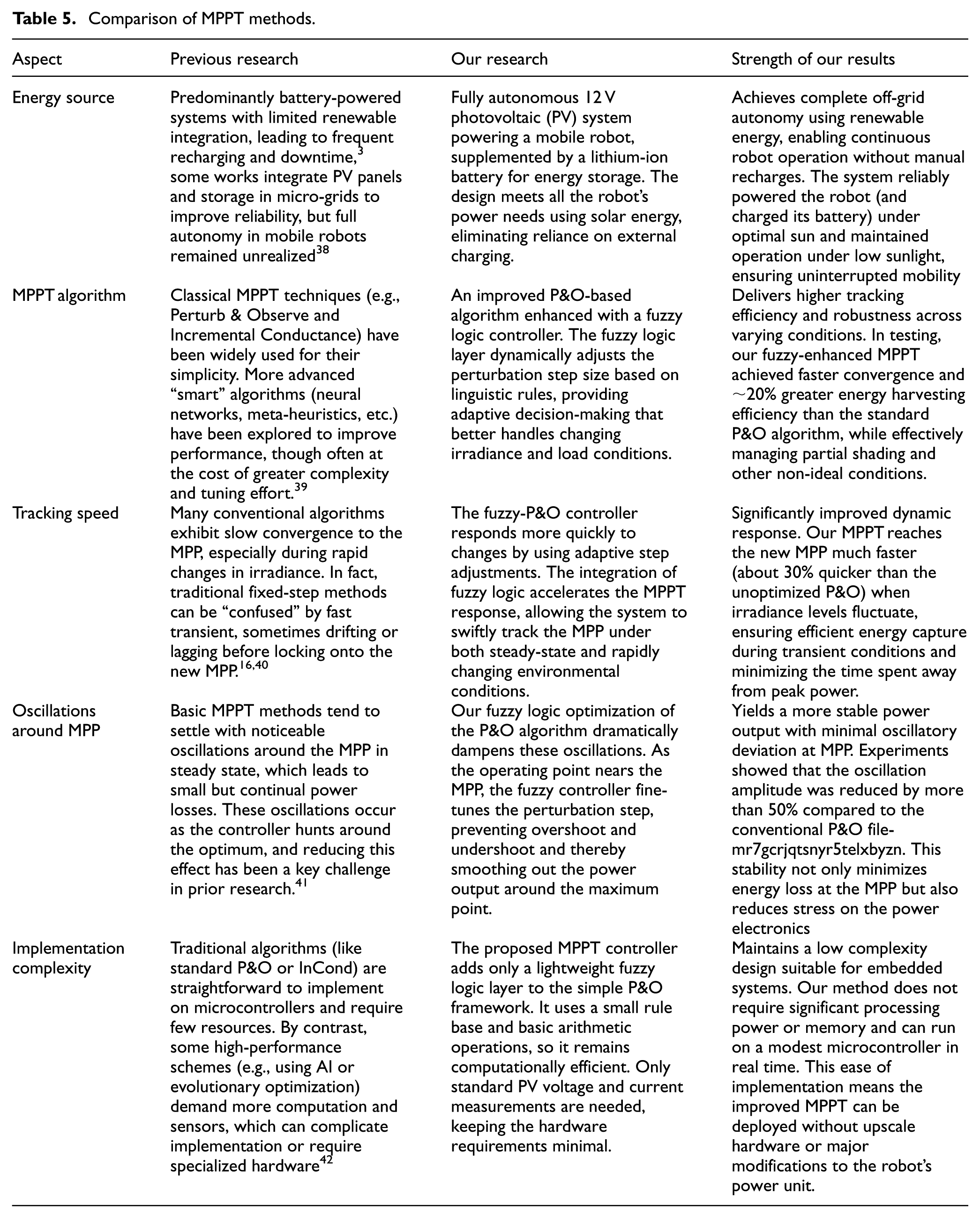
Comparative analysis underscores the significant advancements achieved in the development of MPPT algorithms for solar energy systems. Unlike earlier research that primarily employed conventional MPPT methods, such as the Perturb and Observe (P&O) or Incremental Conductance algorithms, our approach enhances the traditional P&O method through the integration of fuzzy logic control. This innovative enhancement delivers notable improvements, including increased efficiency under variable environmental conditions, faster tracking speeds, and reduced oscillations at the Maximum Power Point (MPP).
These advancements, combined with the deployment of a fully autonomous photovoltaic system, enable our solution to consistently achieve maximum energy efficiency while maintaining stability in real-world scenarios, such as partial shading or abrupt changes in irradiance. This study highlights the transformative potential of incorporating intelligent control mechanisms like fuzzy logic into traditional MPPT techniques, addressing the limitations of earlier methods and paving the way for more reliable and sustainable energy management systems.
Future work will involve rigorous quantitative benchmarking against other advanced MPPT methods through detailed simulations and practical experiments to further solidify the comparative performance benefits of the proposed approach.
Conclusion
This paper proposed a fuzzy logic-enhanced Perturb and Observe (P&O) MPPT controller applied for photovoltaic-powered autonomous mobile robots. The objective was to improve energy harvesting efficiency, dynamic responsiveness, and operational stability under fluctuating environmental conditions, using a lightweight and real-time compatible control strategy. Simulation results confirmed that the proposed method outperforms the classical P&O algorithm, achieving up to 98% MPPT efficiency, reducing power ripple by over 50%, and improving convergence speed by approximately 30%. The system maintained regulated output within ±1 % of the 12 V target across all tested irradiance scenarios, demonstrating both tracking accuracy and output stability.
Future work will focus on real-time hardware implementation and broader testing under varying load and environmental conditions. These steps will further establish the proposed method’s practical applicability in mobile, energy-constrained embedded systems.
Footnotes
Ethical considerations
Ethical approval is not applicable to this study as it did not involve human or animal subjects.
Consent to participate
Not applicable.
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Trial registration number/date
Not applicable.
Data availability statement
The data underlying this article will be shared on reasonable request to the corresponding author.