Nonlinear tracking differentiator (NTD) is a powerful tool for achieving differential signals. Although numerous studies considering NTD have been carried out, the convergence analysis of NTD in these works is accomplished by the Lyapunov method, which is quite complex and needs unrealistic assumptions. Contraction theory, a newly proposed system analysis tool, is particularly effective in analyzing nonlinear non-autonomous systems. Motivated by these considerations, this paper proposed an NTD with variable damping (VD-NTD) based on contraction theory. Firstly, the convergence of NTD is performed with contraction theory, which is much simpler than the traditional Lyapunov-based method. Secondly, the optimization of NTD is done based on its characteristics. Also, the convergence of the proposed VD-NTD is verified elegantly by contraction theory. Finally, simulations on sinusoidal signals, filtered square waves, and complex signals with sudden changes have been carried out, the proposed method not only acquires better performance but is more robust to unpredictable disturbances.
Differential signals play a crucial role in controller design and are widely used in both PID control and nonlinear control strategies.1,2 The quality of differential signals directly affects the overall performance of the control systems. In motion control systems, especially position control systems, how to utilize system information to obtain relevant differential signals has long been a topic of interest among researchers.3–6
Common differential filtering methods include the Luenberger state observer and Kalman filter. Although these methods were initially developed for linear systems, many variants, such as adaptive unscented Kalman filter, cubature Kalman filter, and central difference Kalman filter, have been developed for nonlinear systems as well.7–10 These methods typically require relatively accurate system models to guarantee the precision of the obtained differential signals. However, the requirements of the system model are not always feasible in practice and complicates the design of differentiators.11,12
Considering these challenges, Han proposed a model-free differential filtering method based only on feedback signal: the nonlinear tracking differentiator (NTD).13 Although complete proof was not provided when the NTD was proposed, it has been widely adopted due to its ease of implementation and excellent performance.14,15 Guo completed the proof for the convergence of the NTD using the Lyapunov method, but the proof was very complex and required an unrealistic infinite gain.16,17 Subsequently, numerous researchers have made improvements to NTD, such as feedforward NTD, exponential integral NTD, among others.18–22 The analysis of all these methods is performed based on Lyapunov method, which is quite complex and requires the unrealistic assumption of infinite gain.
Contraction theory is a novel differential-like Lyapunov analysis tool for nonlinear non-autonomous systems.23,24 Compared to the traditional Lyapunov analysis, contraction theory analyzes systems using variations of states rather than time derivatives.25–27 Therefore, the analysis of nonlinear non-autonomous systems with contraction theory is much easier. Furthermore, the system design with contraction theory can bring more design choices than the Lyapunov-based method.28,29 Due to these unique advantages in analyzing and designing nonlinear non-autonomous systems, contraction theory has been applied to fields such as nonlinear controller design and path planning.30–33
On one hand, the NTD is a widely used model-free tool for obtaining differential signals. But the convergence analysis of the NTD with the Lyapunov method is complex and requires unrealistic assumptions. On the other hand, contraction theory, the newly emerging analysis tool, has demonstrated significant effectiveness in the study of nonlinear systems. It is very appealing to use contraction theory to analyze the convergence and improve the design of NTD. In this paper, contraction theory is extended to analyze the convergence of the NTD. The main contributions of this paper are summarized as follows:
(1) The convergence of the NTD is performed by contraction theory and the proof with contraction theory is much simpler than the Lyapunov method.
(2) Based on convergence analysis and the dynamic characteristics of NTD, a novel NTD with variable-damping (VD-NTD) is proposed. Both the quality of differential signals and capabilities to attenuate disturbances are improved by the variable-damping design.
(3) Finally, the effectiveness of the proposed VD-NTD is demonstrated through simulations involving sinusoidal signals of varying frequencies, filtered square waves, and composite sinusoidal signals with abrupt disturbances.
The rest of the work is organized as follows. In section “Preliminary”, preliminary knowledge of contraction theory is presented. In section “Convergence of NTD,” the convergence of NTD is carefully done by contraction theory. In section “Design of NTD with variable damping ratio,” the VD-NTD is proposed, and also the convergence of the novel method is presented. Simulations are carried out in Section “Simulations”. Section “Conclusions” concludes this paper.
Preliminary
Contraction theory is a novel nonlinear systems analysis tool. Unlike the Lyapunov method, which constructs stability conditions with respect to equilibrium points, target trajectories, or invariant sets, contraction theory redefines the stability condition of a system by using functions of quadratic terms with state variances at fixed times.23,25 The contraction stability conditions ensure that all system trajectories will eventually converge to one trajectory in a Riemannian metric. Compared to Lyapunov-based method, contraction theory offers a more convenient framework for analyzing nonlinear time-varying systems by focusing on variations of system states rather than their derivatives. As its distinct advantages in the analysis and optimization design of complex nonlinear non-autonomous systems, contraction theory has been widely applied in research fields such as robust control, adaptive control, and intelligent control. In this paper, we further extend it to nonlinear filter analysis.
A nonlinear non-autonomous system is defined as
where is the system state, is the time, and is a nonlinear smooth function. We will present the contraction condition and incremental exponential stability based on the nonlinear system (1).
Definition 1.25 For a nonlinear non-autonomous system (1), if there is a matrix that satisfies
where is a contant, defines a smooth coordinate transformation of , denotes the largest eigenvalue of a matrix. Then it is said that the nonlinear system (1) satisfies the contraction condition under the metric .
Definition 2. and are two different trajectories (i.e., two solutions) of the nonlinear system (1). If there exist real numbers and that guarantee any two trajectories and can satisfy the following conditions
then system (1) is incremental exponential stable. In equation (3), , represents the variation at a fixed time t.34
Lemma 1. If a nonlinear non-autonomous system (1) satisfies the contraction condition (2) with metric , then any two trajectories and of system (1) satisfy the incremental exponential stability of the following formula
Proof. Firstly, define a Lyapunov-like equation and differentiate ,
which implies . According to the definition of , we can obtain .
Convergence of NTD
The NTD was originally proposed by Han,13 and its mathematical convergence was later established by Guo using the Lyapunov method.16,17 However, this proof relies on an infinite gain, which is unrealistic in practice. We will prove the convergence of NTD with contraction theory. The proof has two advantages: first, it eliminates the impractical requirement of infinite gain; secondly, the proof process is more concise compared to the traditional Lyapunov method.
Theorem 1. Consider the nonlinear system of equation (7)
where , are the system state, and is a continuous function. If satisfies the following conditions
Then for a bounded signal with bounded differential signal , we construct the differentiator as follows
such that the output of equation (9) converges to exponentially.
Proof. Consider the second formula of equation (9) and take the partial derivative of
According to definition 1, the system state satisfies the contraction condition. Considering condition 3 of equation (8), it can be obtained that there exists a solution satisfying . Therefore, is a solution of . According to Lemma 1, any trajectory of system converges to exponentially
Taking equation (12) into first formula of (9), we obtain
Taking the partial derivative of , we can get
Considering and using implicit differential rule, we obtain
where . According to Theorem 1, the system satisfies the contraction condition. According to condition 3 of (8), . is a solution of . According to Lemma 1, we obtain , any trajectory of incremental exponential converges to .
Consider the NTD described as
The saturation function in equation (16) is defined as follows
where is width of the saturation region. If , we obtain
where is defined as
Theorem 2. If the derivative of bounded input signal satisfies the bounded condition , then the system output of NTD (16) will converge to .
Proof. Define . Considering the situation and equation (16), we can obtain
It is easy to verify , . Thus, conditions 1 and 2 of Theorem 1 are satisfied. We define as a solution of
It is obviously that . Taking equation (21) into (20), we obtain . So condition 3 of Theorem 1 is satisfied. Since conditions 1, 2, and 3 of Theorem 1 are satisfied, we can conclude that is incremental exponential converging to .
Consider the situation . Define and take the derivative of
If , will decrease with rate of according to equation (16). Once is satisfied, will decrease to the region at least with rate . The case for is similar. We can conclude that will converge to the region eventually. And if , will incremental exponential converge to .
Design of NTD with variable damping ratio
This section proposes the VD-NTD based on the characteristics of NTD. Firstly, we introduce the following NTD
where is the input of the differentiator, is the estimation of the differential signal, is the gain of NTD, is the adjustable damping coefficient, and is a constant indicating the width of the saturation region. Compared with the NTD equation (16), the NTD (23) can adjust the damping coefficient to improve the filtering performance. The damping coefficient is designed according to characteristics of NTD. When the system is outside the saturation region , the NTD is in the fastest tracking phase which needs large damping to ensure the stability and avoid the oscillation phenomenon. When the system enters the saturated region , the tracking speed of the system slows down and the damping coefficient can be gradually reduced to obtain more accurate tracking of . According to the above analysis, the damping coefficient is designed as follows
where , and are constants designed according to the value of at the boundary of the saturation region. A stable first-order filter function is used to filter the damping coefficient in the saturation region, so the changes of damping coefficient are more gentle and abrupt changes are avoided. The damping coefficient function is corrected as follows
The NTD is designed as equation (23), and the damping coefficient is updated with equation (25). As indicated by the first formula in equation (25), will decrease as approaches , resulting in more precise tracking of target signal. In the presence of sudden disturbances, the second formula in equation (25) provides sufficient damping to mitigate the adverse effects. We analyze the convergence performance of VD-NTD as follows.
Defining and differentiating , we can obtain
Considering the analysis process of equation (22), we can conclude that the system will converge to saturation region after the transient phase. When is satisfied, we define as follows
Taking partial derivatives respect to and , then we can obtain and . Considering and noting that is a stable low-pass filter, we can ensure which leads to . Thus, the condition 1 of Theorem 1 is satisfied. We can design the lowpass filter to limit to a bounded range which guarantees . So the condition 2 of Theorem 1 is satisfied. And we define which is a solution of as follows
It is obviously that . Taking equation (28) into (27), we can obtain that . meets both and . Thus, the condition 3 of Theorem 1 is satisfied. Since all three conditions of Theorem 1 are satisfied, we can conclude that converges to . Therefore, is an estimation of .
Remark 1. The gain determines the tracking capability of the NTD. Damping coefficient should provide adequate margin for stability. The regulation function enhances performance by adjusting the damping coefficient to a desired value based on the characteristics of the NTD. Furthermore, both the damping coefficient and its derivative are constrained within a specific range to ensure system stability.
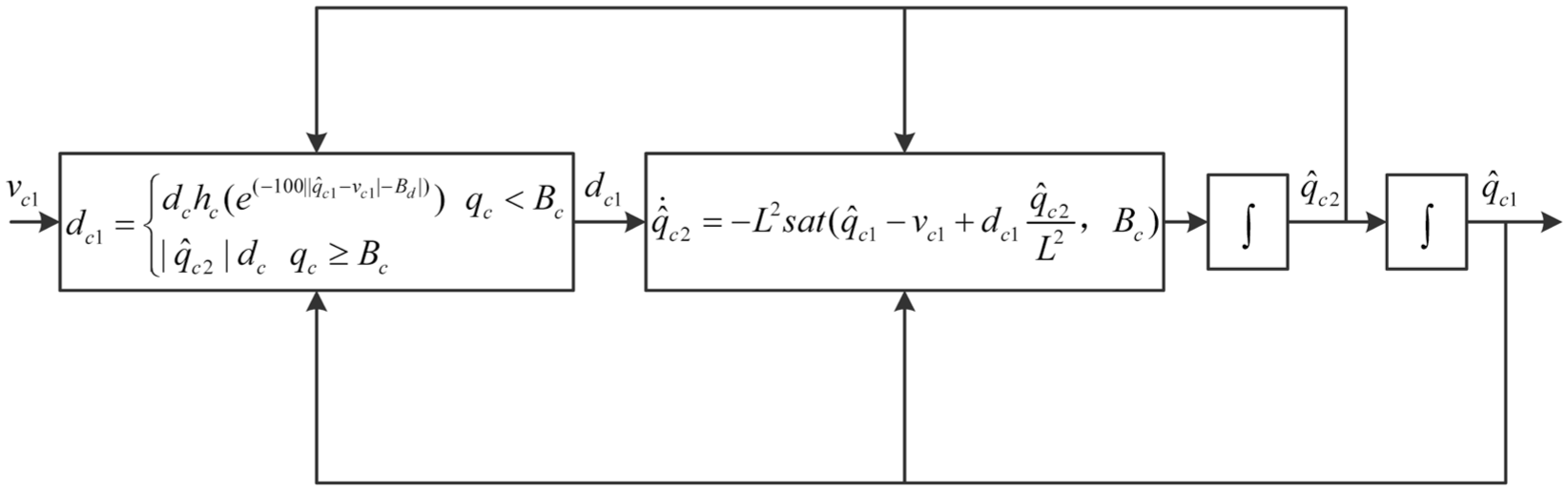
To further illustrate the process of VD-NTD, the signal flowchart is shown in Figure 1.
Signal flowchart of VD-NTD.
Simulations
Simulations about VD-NTD are carried out in this section. The VD-NTD is designed as follows
The damping ratio is defined as
where is constant. The design for provides adequate damping for . is a stable low-pass filter designed as . To verify the efficacy, the VD-NTD is compared with the NTD with constant damping coefficient . The parameters of VD-NTD and NTD are shown in Table 1.
Parameters of NTD and VD-NTD.
Methods
L
NTD
16
0.35
0.02
VD-NTD
16
0.45
0.02
0.03
1
1.5
To quantify the simulation result, the following evaluation indexes are defined.
(1) represents the root-mean-square value of the estimation error of differential signal. is used to evaluate the accuracy of the estimation where denotes the number of sampling points in the simulation and denotes the estimation error.
(2) represents the average of the total variation for the estimation error of differential signal. is used to evaluate the smoothness of the filtered signal where represents the time length of simulation.
Case 1
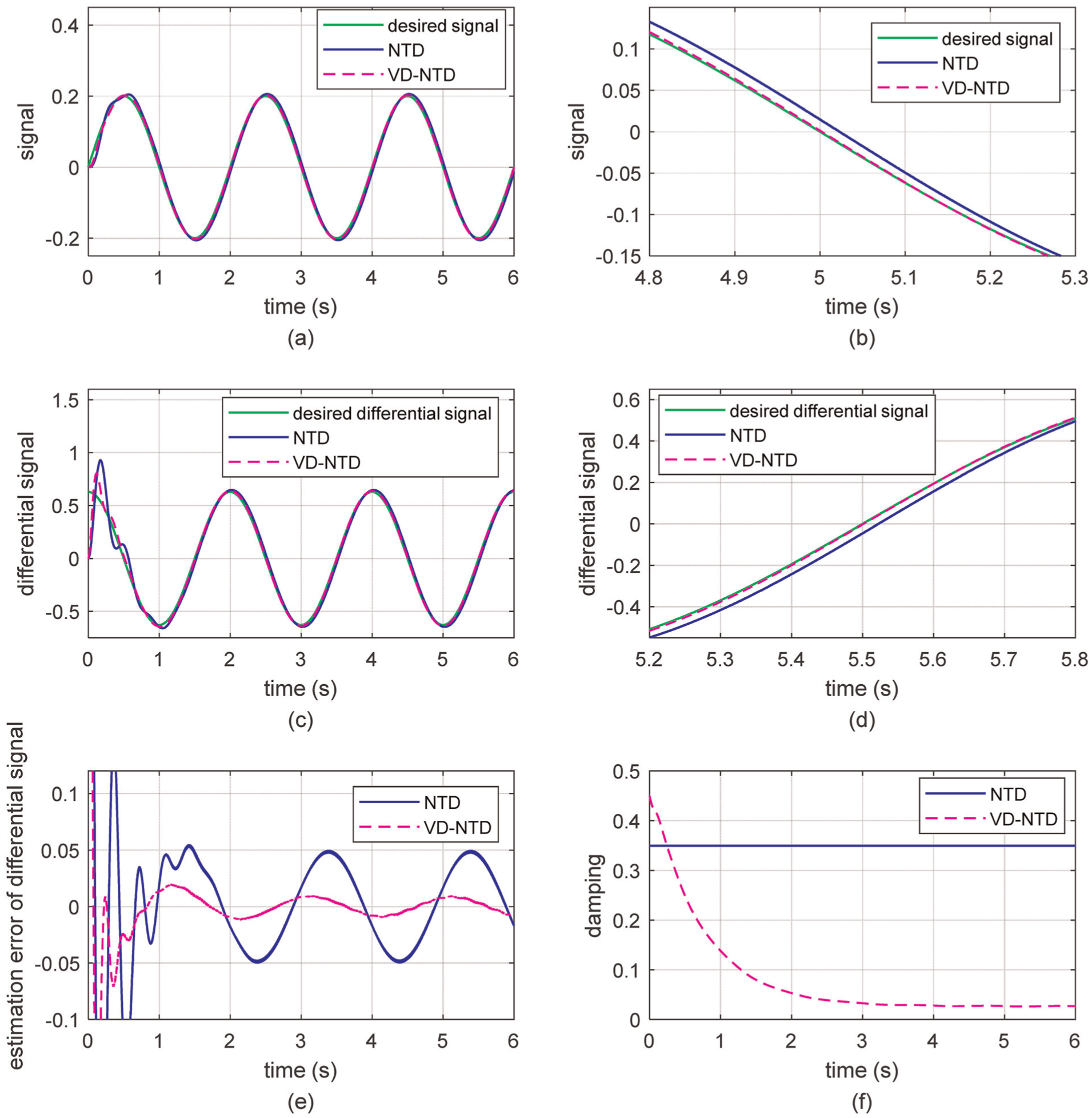
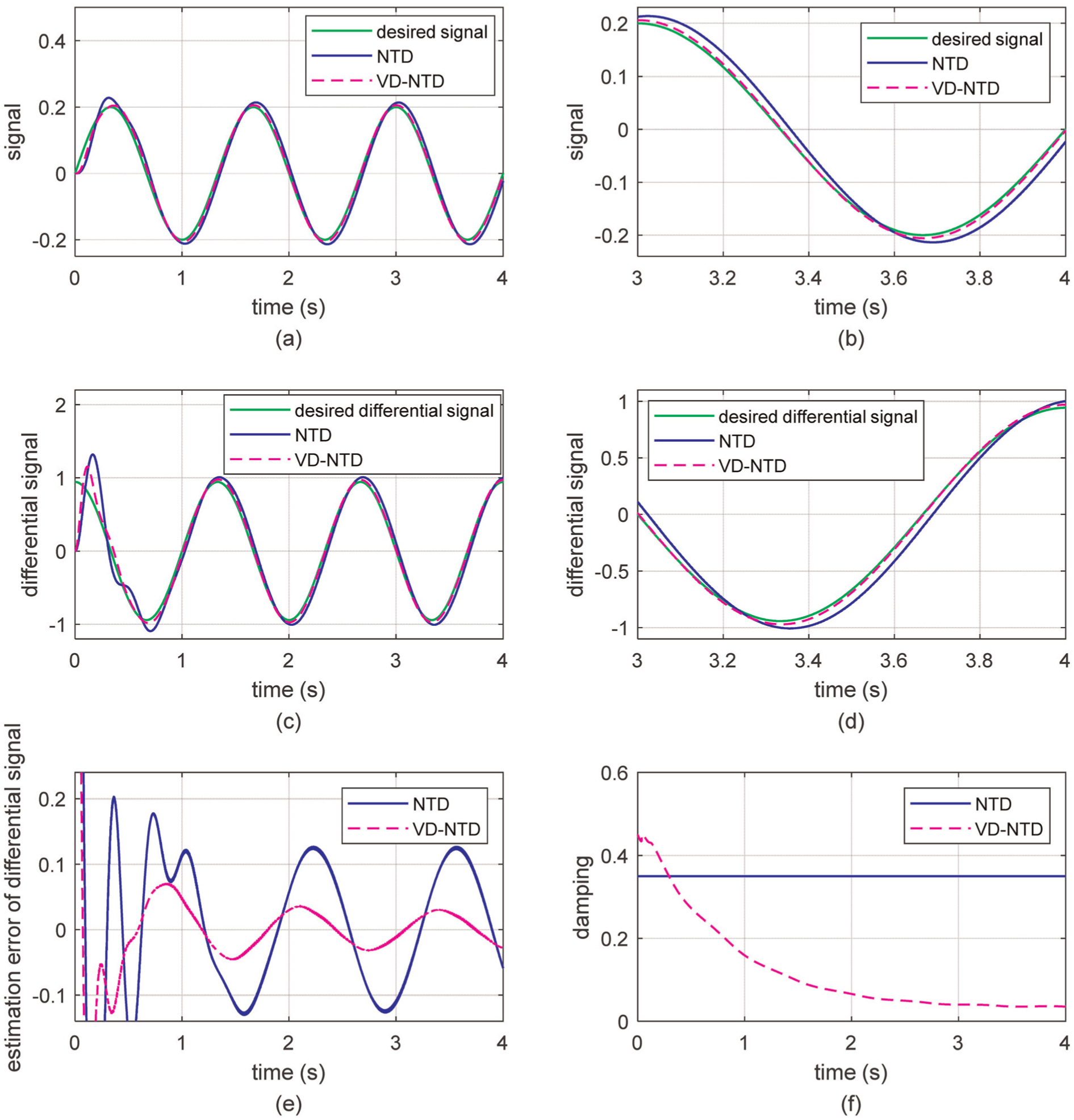
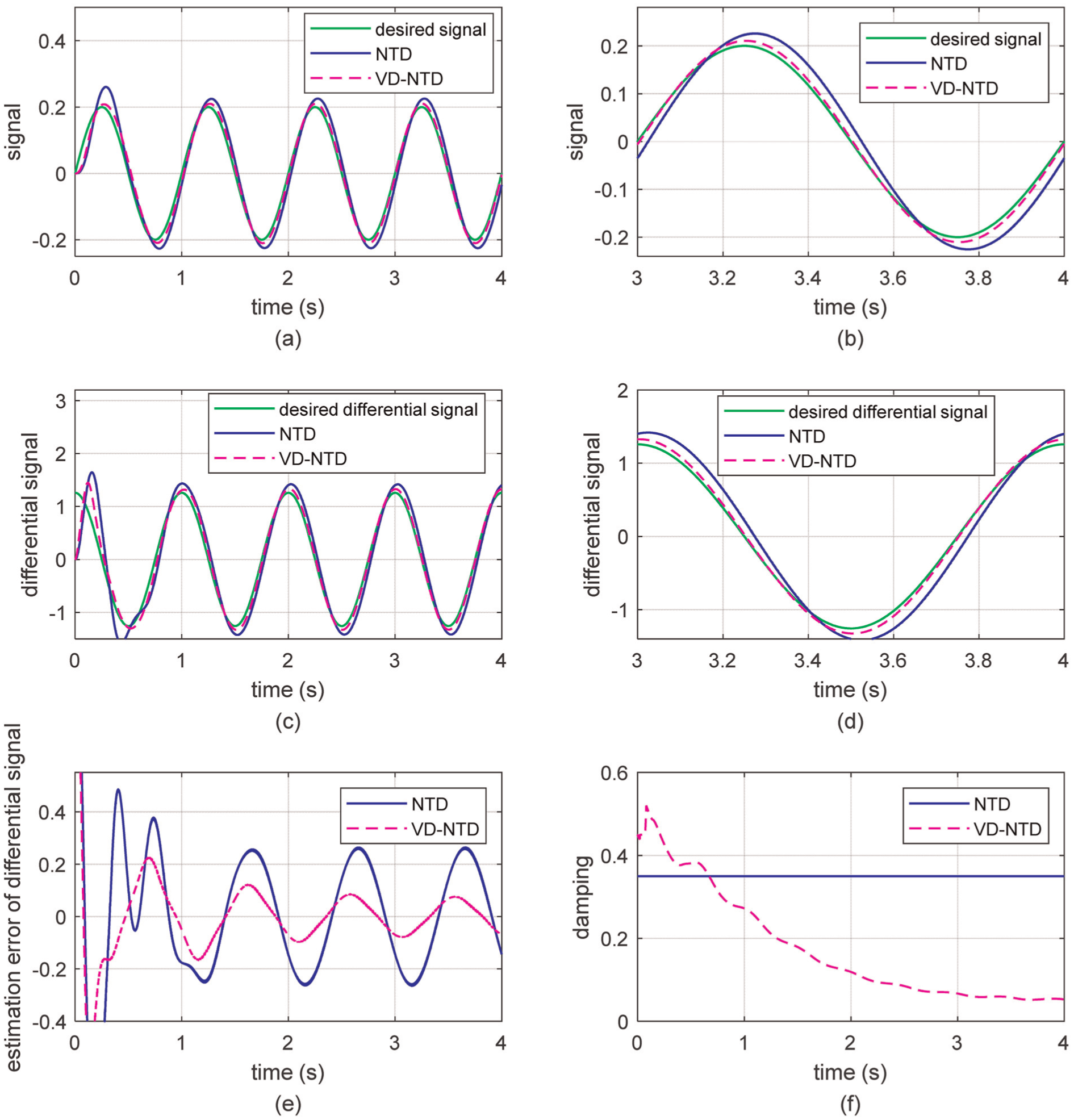
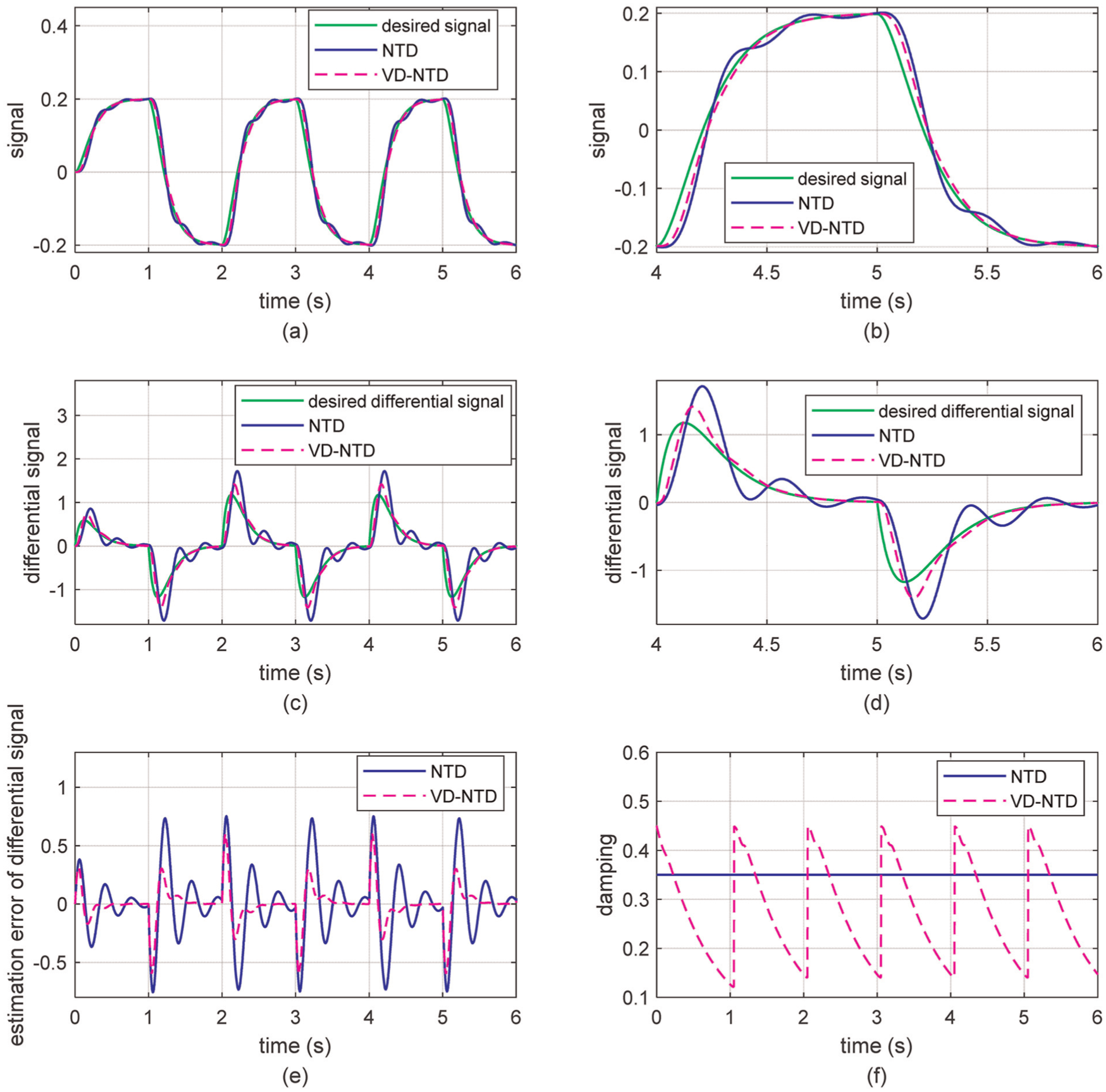
Firstly, sinusoidal signals of different frequencies are filtered to obtain the corresponding differential signals. To make the simulations consistent with real situations, random noise with power spectral density is added to the sinusoidal signals. The NTD and VD-NTD are used to filter the target sinusoidal signals , , and . The simulation results are presented in Figures 2–4. Figures 2–4(a) and (b) illustrate the estimation and zoomed estimation of the target signals. As shown in Figure 2–4(a), both NTD and VD-NTD can track the sinusoidal signals of different frequencies. However, Figures 2–4(b) demonstrate that the VD-NTD achieves significantly higher tracking accuracy compared to the NTD. Figures 2–4(c) and (d) present that the estimation of the differential signals and zoomed differential signals for sinusoidal signals with different frequencies. The differential signals estimated by the VD-NTD track much more closely to the desired differential signals than the NTD. Figures 2–4(e) present the estimation errors of differential signals when tracking sinusoidal signals with different frequencies. As the frequency of sinusoidal signals increases, the estimated errors of both NTD and VD-NTD increase significantly. Additionally, Figures 2–4(e) show that the differential signals estimated by VD-NTD avoid the oscillations observed with the NTD during the transient phase, and the estimation errors of the VD-NTD are significantly smaller than those of the NTD in steady-state phase. Figures 2–4(f) illustrate the variation of damping coefficients for both NTD and VD-NTD. The damping coefficients of the NTD remain constant, while those of the VD-NTD gradually converge to a stable value. Combined with Figures 2–4(e), it can be observed that the estimation error of the differential signals of VD-NTD decreases progressively as the damping coefficients decrease. Table 2 presents the evaluation metrics of the differential signals for various sinusoidal inputs. The results show that the VD-NTD achieves significantly higher differential estimation accuracy compared to the NTD, while the smoothnesses of the differential signals generated by both differentiators are very close. Therefore, the overall quality of the differential signals produced by the VD-NTD is markedly superior to that of the NTD.
Acquire differential signal of : (a) tracking target signal (b) zoom of the target signal (c) estimation of the differential signal (d) zoom of the differential signal (e) differential estimation error (f) change of damping coefficient.
Acquire differential signal of : (a) tracking target signal (b) zoom of the target signal (c) estimation of the differential signal (d) zoom of the differential signal (e) differential estimation error (f) change of damping coefficient.
Acquire differential signal of : (a) tracking target signal (b) zoom of the target signal (c) estimation of the differential signal (d) zoom of the differential signal (e) differential estimation error (f) change of damping coefficient.
Performance indexes when tracking sinusoidal signal with different frequencies.
Trajectories
Method
(m/s)
(m/s)
NTDVD-NTD
0.04490.0328
2.34342.3395
NTDVD-NTD
0.08800.0545
5.26135.2540
NTDVD-NTD
0.15480.0931
9.39719.4360
Case 2
To further verify the capability of the designed VD-NTD in handling with various types of signals, a filtered square wave with added noise is used as the target signal. The filtered square wave is generated by applying the following linear filter to the square wave signal with a frequency 0.5 and an amplitude 0.2. The linear filter is defined as
where is Laplace operator. Figure 5(a) shows that both the NTD and VD-NTD outputs are capable of tracking the desired signal. Figure 5(b) is a zoomed-in view of (a) between 4 s and 6 s, revealing that VD-NTD tracks the desired signal more accurately than the NTD and effectively suppresses fluctuations. Figure 5(c) shows the estimation results of the differential signal, where the estimation of VD-NTD is more precise and smoother than NTD. Figure 5(d) provides a zoomed-in view of (c) between 4 s and 6 s. It can be observed that the desired differential signal changes rapidly at around 4 s and 5 s, resulting in large estimation errors of both NTD and VD-NTD. However, as the rate of change slows down, the VD-NTD responds faster and tracks the desired differential signal more accurately than the NTD. Figure 5(e) shows that the estimation error of differential signal for VD-NTD is much smaller than NTD throughout the entire simulation. Performance indexes in Table 3 further confirm that VD-NTD achieves both lower estimation error and smoother differential signal compared to NTD. Figure 5(f) shows the variation of damping ratio. Compared with Figure 5(e), it can be observed that the damping ratio of VD-NTD increases when estimation error is large, enhancing the robustness of the system. Conversely, when the estimated differential signal closely matches the desired signal, the damping ratio decreases, thereby improving the estimation accuracy of VD-NTD. In summary, the variable damping mechanism of the VD-NTD significantly improves the quality of the estimated differential signal.
Acquire differential signal of filterd square wave: (a) tracking target signal (b) zoom of the target signal (c) estimation of the differential signal (d) zoom of the differential signal (e) differential estimation error (f) change of damping coefficient.
Performance indexes when tracking filtered square wave.
Trajectories
Method
(m/s)
(m/s)
random signal
NTDVD-NTD
0.31490.1633
5.97494.6207
Case 3
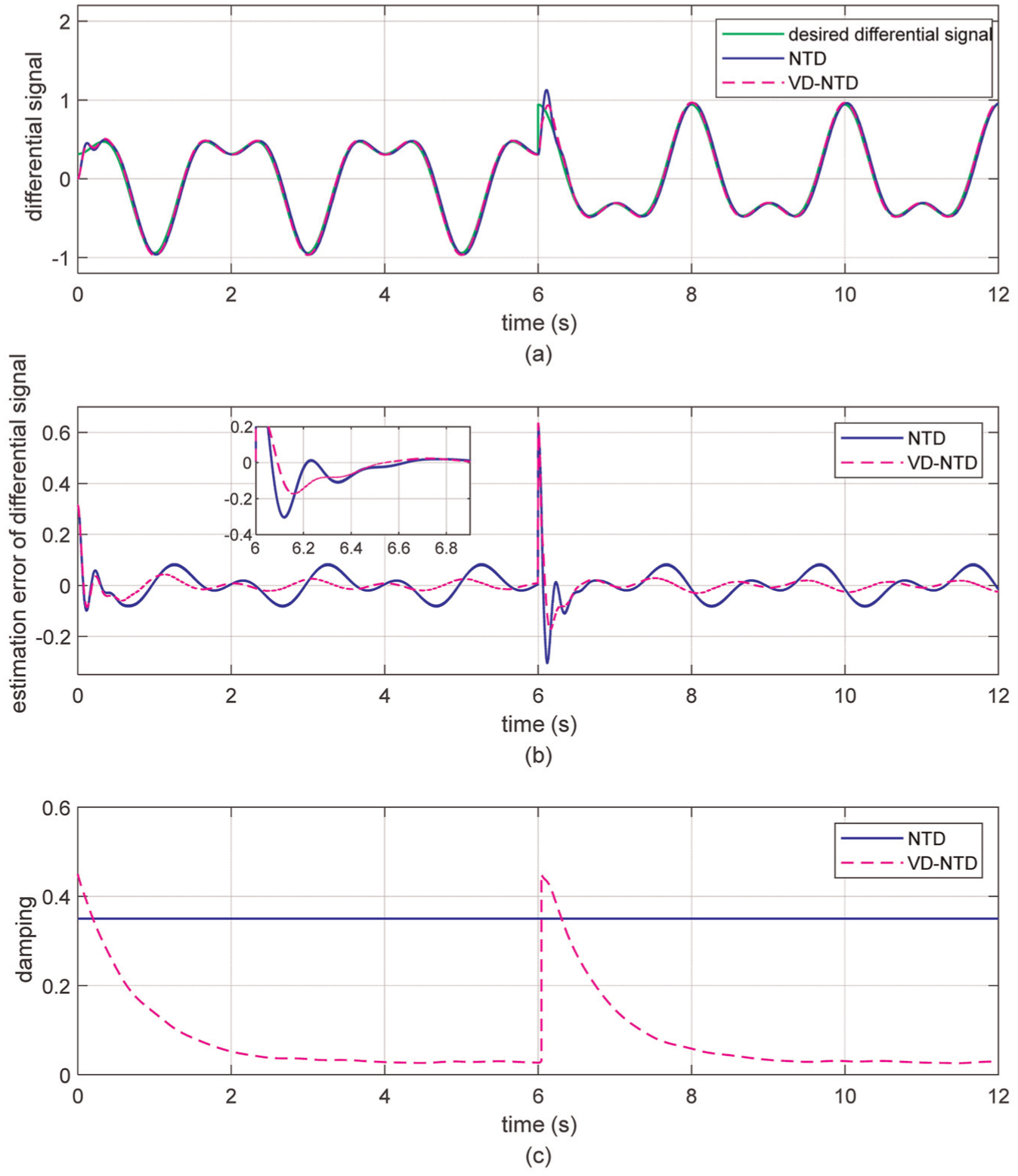
To further verify the effectiveness of the designed VD-NTD in handling more complex scenarios, a random signal added with noise is used as the target signal. The random signal , composed of sinusoidal signals of different frequencies, is defined as follows
The simulation results are presented in Figure 6. Figure 6(a) shows the estimated differential signals by NTD and VD-NTD. Both NTD and VD-NTD are able to estimate the differential signal, even in the presence of a sudden change of ideal differential signal at 6 s. Figure 6(b) displays the estimation error of the differential signal, where the estimation accuracy of the VD-NTD is significantly higher than NTD. Figure 6(c) illustrates the variation of the damping coefficient of VD-NTD: the damping coefficient converges to a steady value before 6 s, undergoes a sudden change at 6 s, and then gradually stabilizes again. This abrupt change is triggered by the discontinuity of ideal differential signal shown in Figure 6(a). In Figure 6(a) at 6 s, both the estimated differential signals of NTD and VD-NTD exhibit oscillations. However, the VD-NTD has a much lighter oscillation than NTD. The zoomed-in view in Figure 6(b) further highlights the reduced oscillation of VD-NTD at the discontinuity point. The adjustment of the damping coefficient helps attenuate the influence of disturbances, enhancing the robustness of VD-NTD to sudden changes. The performance indexes summarized in Table 4 confirm that VD-NTD achieves higher accuracy in estimating the differential signal, while the smoothness of the signals produced by both differentiators is very similar. Therefore, the differential signal obtained by VD-NTD achieves a higher quality.
Acquire differential signal of random signal: (a) estimation of differential sign (b) estimation error of differential signal (c) change of damping coefficient.
Performance indexes when tracking random signals.
Trajectories
Method
(m/s)
(m/s)
Random signal
NTDVD-NTD
0.05880.0389
2.99633.0094
The simulation results from the three cases above demonstrate that the VD-NTD significantly improves the quality of the estimated differential signals but also enhances robustness. The VD-NTD intelligently adjusts its damping coefficient: it decreases the damping coefficient to improve tracking accuracy when damping coefficient becomes excessively high and increases damping coefficient to enhance robustness in the presence of unexpected disturbances. In general, the VD-NTD is a model-free differentiator that can acquire a higher quality differential signal than traditional NTD.
Conclusions
This article presents an in-depth study of the NTD and proposes a novel VD-NTD based on contraction theory. The main contributions of this work are as follows:
(1) The convergence of the traditional NTD is rigorously proven using contraction theory. Compared with Lyapunov-based approaches, the proposed proof is significantly simpler and eliminates the need for the assumption of infinite gain.
(2) A novel VD-NTD with variable damping is proposed, and its convergence is also established through contraction theory.
(3) The simulation results confirm that the proposed VD-NTD significantly enhances differential signal estimation accuracy and robustness to disturbances.
The future work will focus on investigating the data-driven model NTD using contraction theorem, such as the neural network model NTD, and fuzzy model NTD.
Footnotes
ORCID iD
Ye Chen
Ethical considerations
This article does not contain any studies with human or animal participants.
Consent to participate
There are no human participants in this article and informed consent is not required.
Funding
The authors disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Nanxun Scholars Program for Young Scholars of ZJWEU (RC2024021522), the National Key R&D Program Project (No.2025YFE0102900), the National Natural Science Foundation of China (No. 52376037), and the “Pioneer” and “Leading Goose” R&D Program of Zhejiang (No. 2025C02030).
Declaration of conflicting interests
The authors declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
References
1.
BounemeurAChemachemaMEssounbouliN.Indirect adaptive fuzzy fault-tolerant tracking control for MIMO nonlinear systems with actuator and sensor failures. ISA Trans2018; 79: 45–61.
2.
BounemeurAChemachemaM.Finite-time output-feedback fault tolerant adaptive fuzzy control framework for a class of MIMO saturated nonlinear systems. Int J Syst Sci2025; 56(4): 733–752.
3.
JiangBDeghatMAndersonBD.Simultaneous velocity and position estimation via distance-only measurements with application to multi-agent system control. IEEE Trans Autom Control2016; 62(2): 869–875.
4.
SuHChenCYangZ, et al. Bearing-based formation tracking control with time-varying velocity estimation. IEEE Trans Cybern2022; 53(6): 3961–3973.
5.
YaoDShenJHouJ, et al. Online vehicle velocity prediction based on an adaptive GRNN with various input signals. Int J Automot Technol2024; : 1–13.
6.
ChenYTaoGYaoY.A dual adaptive robust control for nonlinear systems with parameter and state estimation. Meas Control2024; 57(4): 378–390.
7.
ZhangYLiMZhangY, et al. An enhanced adaptive unscented Kalman filter for vehicle state estimation. IEEE Trans Instrum Meas2022; 71: 1–12.
8.
Santos-LeónJCOriveR, et al. The cubature Kalman filter revisited. Automatica2021; 127: 109541.
9.
ZhaoQYangZSunX, et al. Speed-sensorless control system of a bearingless induction motor based on iterative central difference Kalman filter. Int J Electron2020; 107(9): 1524–1542.
10.
HeLWangYWeiY, et al. An adaptive central difference Kalman filter approach for state of charge estimation by fractional order model of lithium-ion battery. Energy2022; 244: 122627.
11.
UrreaCAgramonteR.Kalman filter: historical overview and review of its use in robotics 60 years after its creation. J Sens2021; 2021(1): 9674015.
HanJ.From PID to active disturbance rejection control. IEEE Trans Ind Electron2009; 56(3): 900–906.
14.
SuYSunDDuanB.Design of an enhanced nonlinear PID controller. Mechatronics2005; 15(8): 1005–1024.
15.
TangYWuYWuM, et al. Nonlinear tracking-differentiator for velocity determination using carrier phase measurements. IEEE J Sel Top Signal Process2009; 3(4): 716–725.
16.
GuoBZZhaoZL.On convergence of tracking differentiator. Int J Control2011; 84(4): 693–701.
17.
GuoBZZhaoZL.Weak convergence of nonlinear high-gain tracking differentiator. IEEE Trans Autom Control2012; 58(4): 1074–1080.
18.
TianDShenHDaiM.Improving the rapidity of nonlinear tracking differentiator via feedforward. IEEE Trans Ind Electron2013; 61(7): 3736–3743.
19.
ShaoXLiuJYangW, et al. Augmented nonlinear differentiator design. Mech Syst Signal Process2017; 90: 268–284.
20.
ChenZZongXTangW, et al. Design of rapid exponential integral nonlinear tracking differentiator. Int J Control2022; 95(7): 1759–1766.
21.
FanYJingWBernelli-ZazzeraF.Nonlinear tracking differentiator based prescribed performance control for space manipulator. Int J Control Autom Syst2023; 21(3): 876–889.
22.
YousifNQHasanAFShallalAH, et al. Performance improvement of nonlinear differentiator based on optimization algorithms. J Eng Sci Technol2023; 18(3): 1696–1712.
23.
LohmillerWSlotineJJE. On contraction analysis for non-linear systems. Automatica1998; 34(6): 683–696.
24.
LohmillerWSlotineJJ.Control system design for mechanical systems using contraction theory. IEEE Trans Autom Control2000; 45(5): 984–989.
25.
TsukamotoHChungSJSlotineJJE. Contraction theory for nonlinear stability analysis and learning-based control: A tutorial overview. Annu Rev Control2021; 52: 135–169.
26.
BounemeurAChemachemaMZahafA, et al. Adaptive fuzzy fault-tolerant control using Nussbaum gain for a class of SISO nonlinear systems with unknown directions. Int Conf Electr Eng Control Appl2019; 493–510.
27.
BounemeurAChemachemaM.Adaptive fuzzy fault-tolerant control using Nussbaum-type function with state-dependent actuator failures. Neural Comput Appl2021; 33: 191–208.
28.
González-RomeoLLReyes-BáezRGuerrero-CastellanosJF, et al. Contraction-based nonlinear controller for a laser beam stabilization system using a variable gain. IEEE Control Syst Lett2020; 5(3): 761–766.
29.
ChenYTaoGFanX.A contraction theory-based adaptive robust control for the trajectory tracking of a pneumatic cylinder. IEEE Trans Ind Electron2023; .
30.
TsukamotoHChungSJ.Neural contraction metrics for robust estimation and control: A convex optimization approach. IEEE Control Syst Lett2020; 5(1): 211–216.
31.
TsukamotoHChungSJSlotineJJE. Neural stochastic contraction metrics for learning-based control and estimation. IEEE Control Syst Lett2020; 5(5): 1825–1830.
32.
TsukamotoHChungSJ.Learning-based robust motion planning with guaranteed stability: A contraction theory approach. IEEE Robot Autom Lett2021; 6(4): 6164–6171.
33.
SinghSLandryBMajumdarA, et al. Robust feedback motion planning via contraction theory. Int J Robot Res2023; 42(9): 655–688.
34.
DacorognaB.Introduction to the Calculus of Variations. World Scientific, 2024.