
Abstract
To solve the intelligent substation inspection robot path planning with low global efficiency, search node redundancy, and may even fail under a dynamic obstacle environment, which is normally based on the A* or dynamic window approach (DWA) algorithms. This study attempted to use the improved A* algorithm and an enhanced DWA algorithms for intelligent substation inspection robot path planning to improve its path planning ability under dynamic inspection. In this study, The neighborhood traversal rule of the A* is refined, and the DWA evaluation function is adjusted to align with the specific demands of intelligent substation inspection. Simulation results demonstrate that combining the improved A* algorithm with the enhanced DWA significantly reduces the inspection path length by 24.4% compared to traditional A* in fixed point inspection condition. This integration greatly enhances the dynamic path-planning performance of substation inspection robots, particularly in terms of path smoothness and inspection efficiency.
Keywords
Introduction
With the optimization and upgrading of the power grid structure and the continuous expansion of the scale of the power system, intelligent substations are an important part of the power grid, 1 and the security and reliability of their power supply directly affect the operation of the power grid. To ensure secure and reliable operation of an intelligent substation, the equipment in the substation must be inspected. Recently, more and more inspection robots are being used for substation inspection as the robotics industry continues to evolve and become more intelligent. 2
Traditional robot path planning algorithms include the simulated annealing algorithm, 3 A* algorithm, 4 genetic algorithm, 5 neural network algorithm, 6 and dynamic window approach (DWA) algorithms. 7 However, the A* algorithm suffers from low efficiency and requires many search nodes. 8 Xu et al. 9 investigated an improved A* algorithm that replaced the traditional obstacle-free area with a rectangular boundary. This approach reduced the time consumption and improved the efficiency of the algorithm by allowing bidirectional exploration from both the starting point and the target point. Wang et al. 10 explored an adaptive bidirectional A* algorithm designed to reduce path planning time. Chen et al. 11 introduced A* integrated with artificial potential fields, aiming to reduce path planning time and minimize the number of search nodes. There are also some studies on the A* combined with the heuristic method12,13 to determine the shortest path planning and improve its efficiency. Razzaq et al. 14 combined A-star algorithm with chaotic particle swarm optimization algorithm to find the shortest planning path. To satisfy the requirements for path smoothness, Wang et al. 15 applied the Bezier curve theory to smooth the path.
Although many researchers have studied algorithms that integrate the A* algorithm, the problem of robot path planning with dynamic obstacles in complex environments remains unsolved. The DWA is an effective method for dynamic obstacle path planning, 16 but tends to get trapped in local optimal solutions. Recently, researchers have been investigating robot path planning methods integrate the A* with the DWA. Zhong et al. 17 introduced a composite path planning procedure that implements the A* algorithm with an adaptive window approach to achieve global path planning, timely tracking, and obstacle prevention for mobile robots in large-scale and dynamic environments. An enhanced DWA with the A* algorithm has been proposed 18 to help robots avoid obstacles and track targets in complex environments. Li et al. 19 proposed a routing method that fuses the A* algorithm with DWA technology, enhancing the A* through a subnode optimization technique to address issues such as low global path planning reliability and susceptibility to deadlock. Xing 20 developed an algorithm that combines A* with an inertial window approach to improve navigation in confined environments. Guan and Wang 21 presented an upgraded A* method for USV path planning along with an optimized dynamic window approach for conflict rejection. However, they are less likely to consider the characteristics of power substations and the potential encounter of dynamic obstacles during the inspection process, this study focuses on dynamic path-planning methods for inspecting robot.
At present, there are few studies on substation inspection robot path planning, and the influence of dynamic obstacles in the inspection process and the path planning problem under emergency working conditions are not considered. In this paper, Sections “Enhanced DWA algorithm” and “Fusion strategy of improved A* and enhanced DWA” describe the improved A* algorithm and the enhanced DWA, respectively. Subsequently, a fusion strategy of improved A* and enhanced DWA was presented. The proposed algorithm-based dynamic path planning for a substation inspection robot with dynamic obstacles for urgent tasks during the inspection process is simulated and analyzed in Section “Simulation analysis.” Finally, Section “Conclusion” presents the conclusions.
Improved A* algorithm
Traditional A* algorithm
A* algorithm as the most commonly used path search algorithm. It describes the path between two points on a map using a cost function, and uses a recursive search to determine the shortest path that minimizes the cost. The A* algorithm is evaluated as:

As shown in equation (1):
This paper uses the Euclidean distance as the heuristic function

The improved A* algorithm
In most cases, the A* algorithm is in accordance with the eight search directions for selecting the expansion node; in some redundant search directions, the redundancy of the search direction will result in too many planning nodes, resulting in too many path turns, making each section of the planning path too short, resulting in the inspection robot moving the process of traveling a very short distance and lagging. The improved A* is used to make the path of the intelligent substation inspection robot smoother.
Firstly, optimize the A* neighborhood traversal rule. In other words, among the eight possible movement directions of the inspection robot, the direction opposite to the target node is eliminated, while the direction aligned with it is retained, thereby improving the efficiency of the A* algorithm. According to Figure 1, in the selection of the moving direction of the Type I node, note 1–8 total eight selection directions. By positional relationship between current node and target node, 1, 3, 5, and 7 are defined as type I target nodes; 2 and 6 are defined as type II target nodes; and 4 and 8 are defined as type III target nodes. When the position of the target node conforms to Type I, moving direction 7 opposite to 3 and moving directions 6 and 8 adjacent to the left and right of 7 are eliminated.
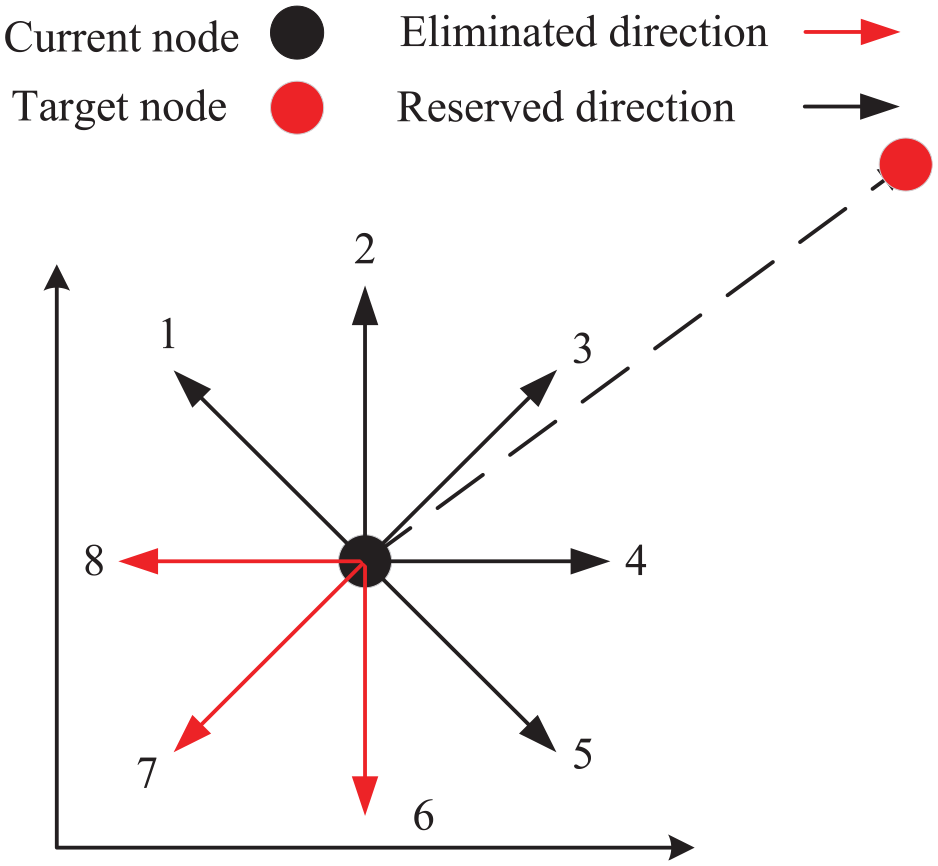
Node movement direction.
Secondly, a key node extraction algorithm is proposed. This method focuses on retaining essential nodes that must be included in the planned path while filtering out redundant nodes in the A* algorithm. This process aims to shorten and smooth the path generated by the A* algorithm. The concrete steps are as follows.
(1) Full node is obtained. set
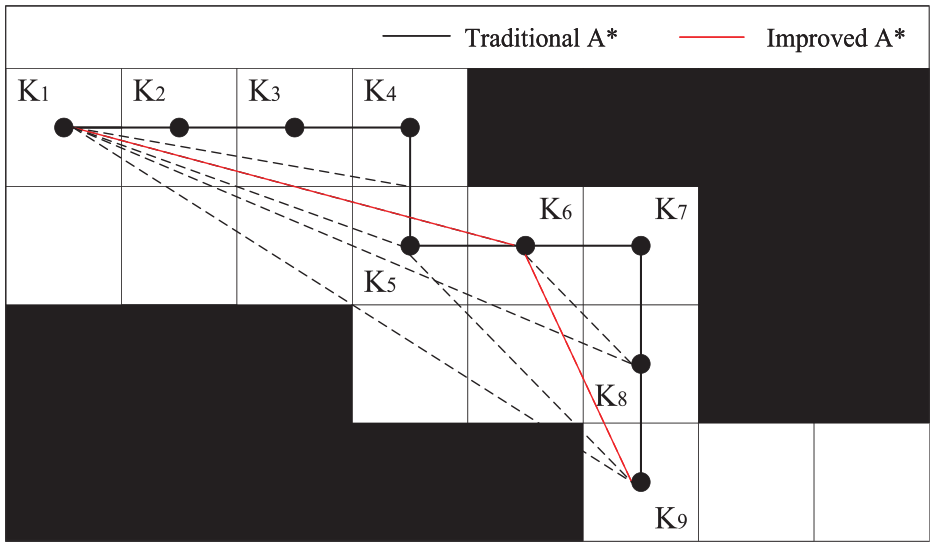
Key node extraction schematic.
Enhanced DWA algorithm
In the complex inspection environment of intelligent substation inspection robots, this study explores dynamic path planning by integrating the improved A* for global path planning with the enhanced DWA for local dynamic path planning.
Traditional DWA algorithm
Inspection robot kinematics model
Fox
23
introduced the DWA algorithm, which transforms the position control problem of a moving inspection robot into a velocity control problem. Specifically, the linear and angular velocities of the inspection robot are discretely sampled within the allowable velocity range, and the trajectories of these velocity combinations are simulated and evaluated using a function over a forward prediction time

In equation (3),
Traditional DWA algorithm evaluation function
The DWA algorithm predicts the next step based on the robot’s model and finds the best path using equation (4).

In equation (4),
Improved DWA Algorithm
The DWA algorithm has good avoidance capabilities, yet it easily falls into its own local optimum,
22
which leads to local path planning terminated near the obstacles and cannot reach the inspection target node. In this paper, we will improve the target azimuth evaluation

In equation (5),
Improved DWA algorithm evaluation function:

In equation (6),
Fusion strategy of improved A* and enhanced DWA
This study addresses the limitations of the A* and DWA algorithms for a substation inspection robot. The improved A* and DWA algorithms are combined to ensure optimal path planning.
As shown in Figure 3, the main steps of the fusion strategy are initializing the parameters of each node of the A* algorithm, establishing the full node set
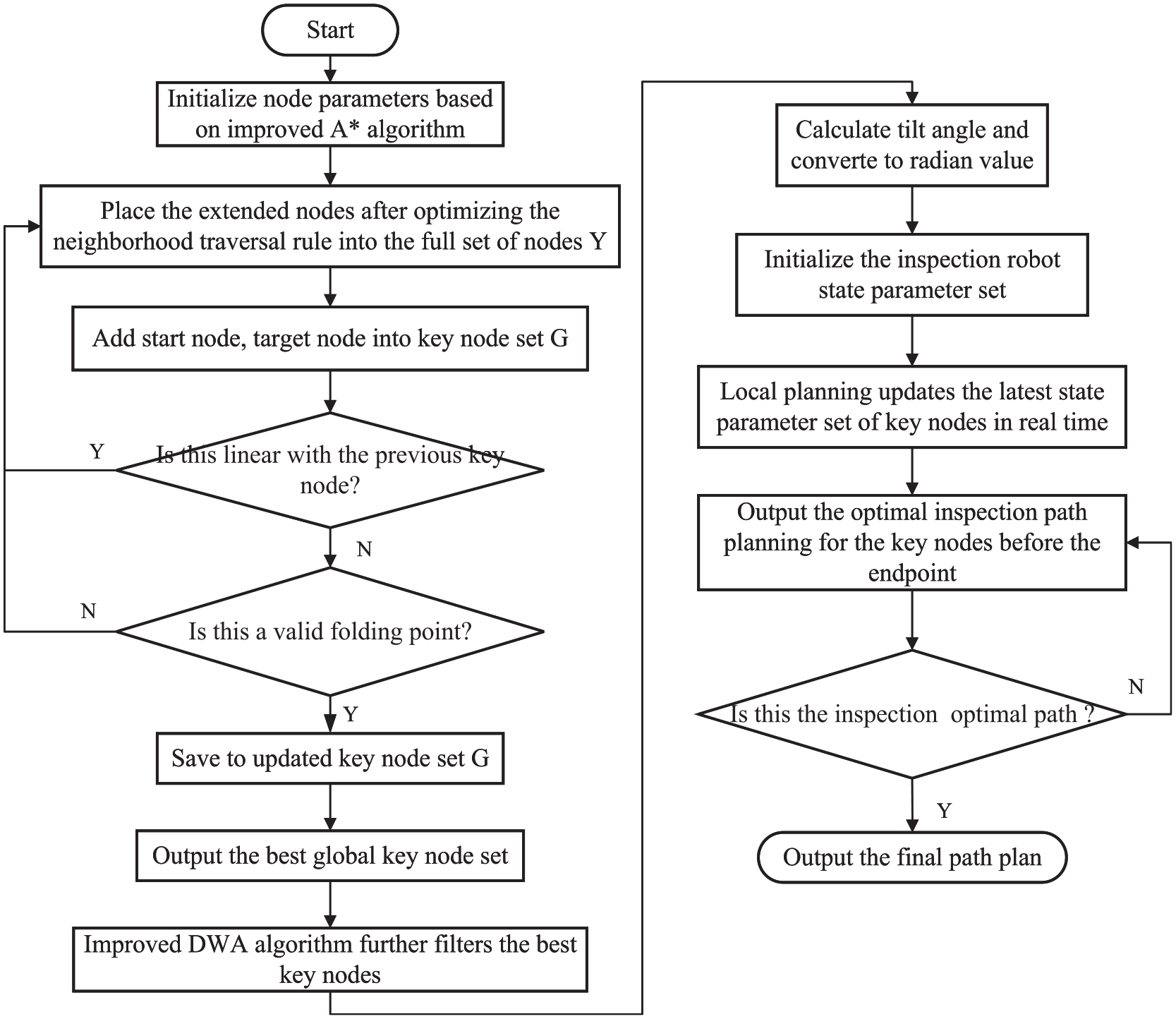
The proposed path planning method.
Simulation analysis
To evaluate the performance of the proposed algorithm in path planning for intelligent substation inspection robots, a simulation analysis was performed using MATLAB modeling of a substation. Figure 4 shows the substation grid map, where
The substation inspection robot fixed-point path planning.
Fixed-point inspection path planning
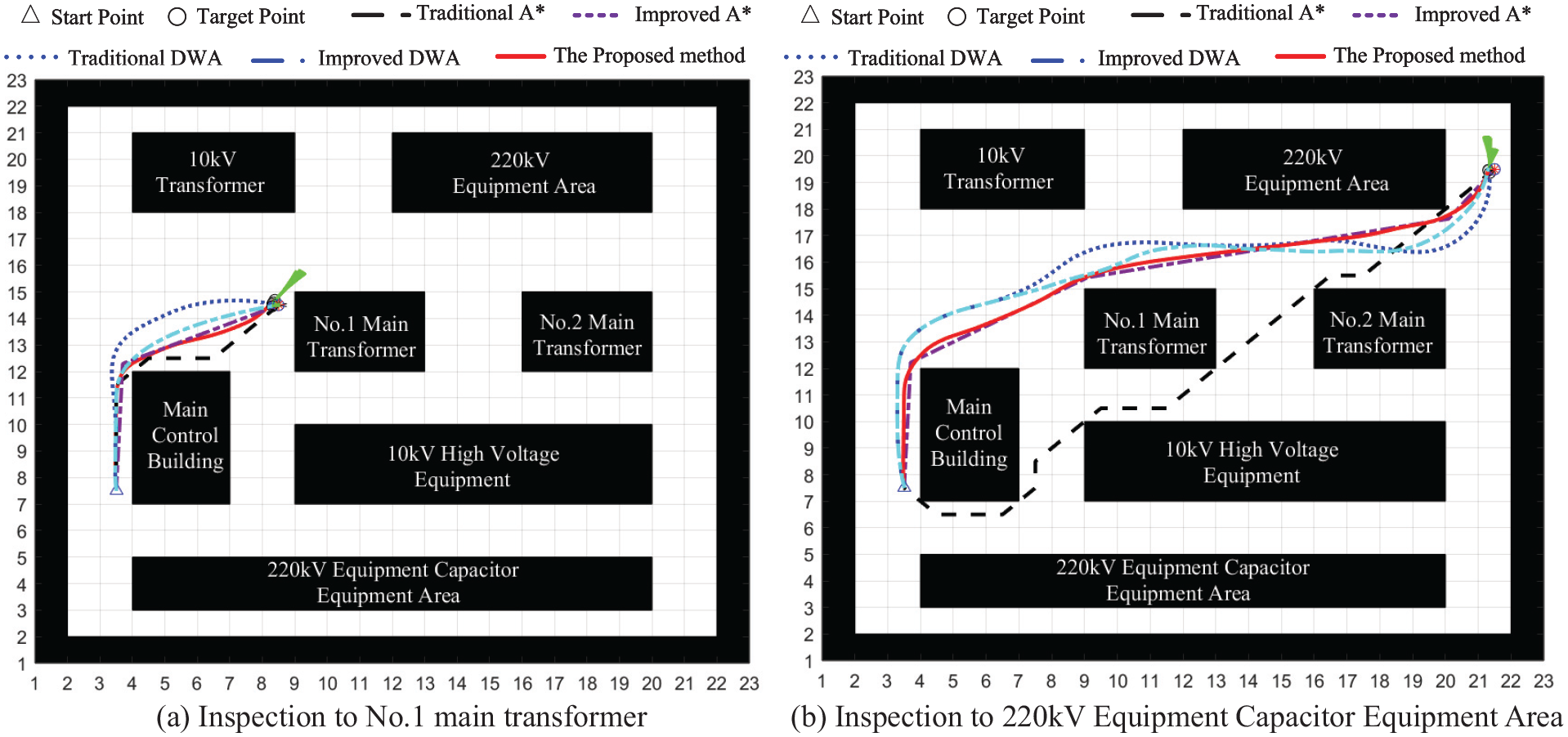
A comparative simulation analysis was conducted to evaluate the performance improvements of the A* and DWA algorithms. This analysis includes the A*, DWA, and fusion algorithms in the context of path planning for intelligent substation inspection robots. The simulation evaluates path planning performance under fixed-point and emergency inspection conditions. Figure 4 illustrates fixed-point inspection, while Table 1 compares the substation robot’s path planning performance.
The comparison of substation robot path planning performance.
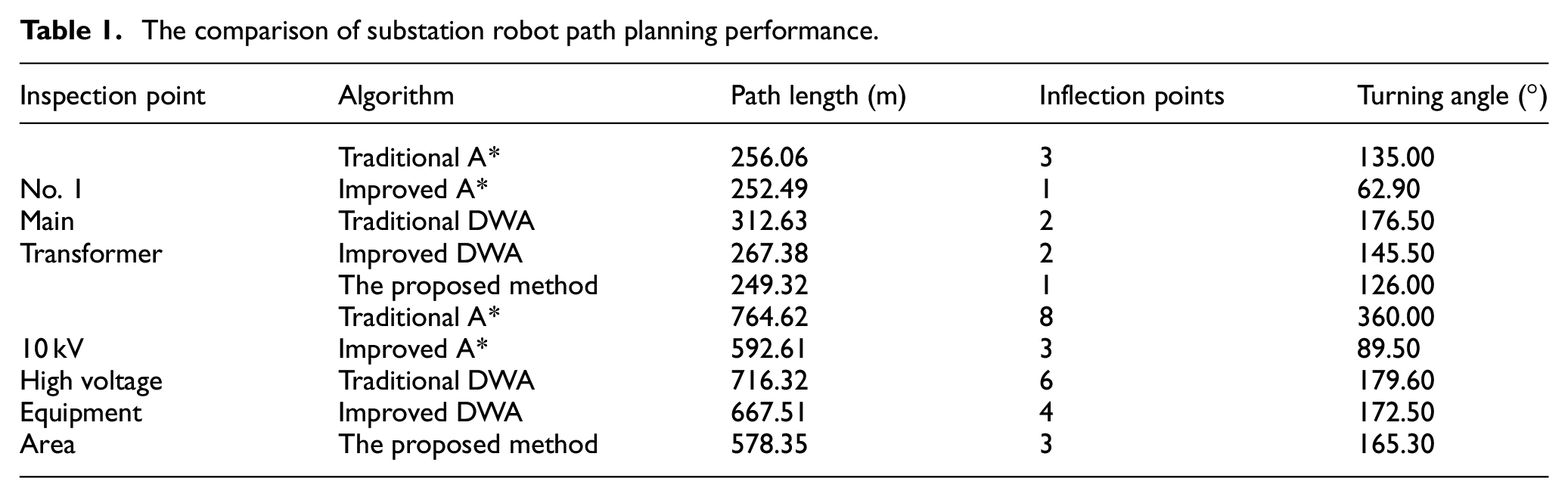
As shown in Figure 4 and supported by the data in Table 1, for the substation inspection robot planning the path from the starting point S (4.5,7.5) to the target point T1 (8.5,14.5) for the No. 1 Main Transformer inspection, the results based on different algorithms indicate that, compared to the traditional A* algorithm, the enhanced A* algorithm shortens the path, inflection points, and turning angle. However, the planned path does not maintain an adequate safe distance from the inspection equipment. The introduction of DWA algorithm, and its improvement, reduced the inspection path from 312.63 to 267.38 m by 14.5% in comparison to the traditional DWA. The proposed algorithm effectively shortens the inspection path, reduces the number of turns, and lowers the turning angles in comparison with to the traditional A*, resulting in a smoother path. A further comparative analysis of the path planning simulation from the inspection point S (4.5,7.5) to the 10 kV high-voltage equipment area T2 (21.5,19.5) shows that the proposed method outperforms the conventional. Specifically, inspection path shortened from 764.62 to 578.35 m, the path length shortened with 24.4% in comparison to the traditional A*, turning points reduced from 8 to 3, turning angle decreased from
Multi-point traversal inspection path planning
To verify the substation inspection robot’s path planning performance, followed by simulation to analyze the substation inspection robot multi-objective inspection and dynamic inspection conditions of the path planning performance.
Figure 5 illustrates the inspection robot multi-point traversal planning path. Starting from point A (3.5,7.5) at the control building, the robot proceeds to the 10 kV main transformer fixed-point inspection point B (5.5,17.5), then to the 220 kV equipment area fixed-point inspection point C (18.5,17.5), point D (21.5,19.5), No. 2 main transformer fixed-point inspection point E (18.5,11.5), No. 1 main transformer fixed-point inspection point F (11.5,11.5), and the 10 kV high-voltage equipment area fixed-point inspection point G (8.5,7.5), covering a total of six inspection target points. The robot then returns to the control building at point A, completing a multi-objective traversal inspection. This demonstrates that the proposed algorithm is capable of successfully executing the intelligent substation traversal inspection task. When random obstacles appear in the inspection process, it can realize dynamic routing, which verifies the proposed algorithm’s functionality in the multi task inspection.
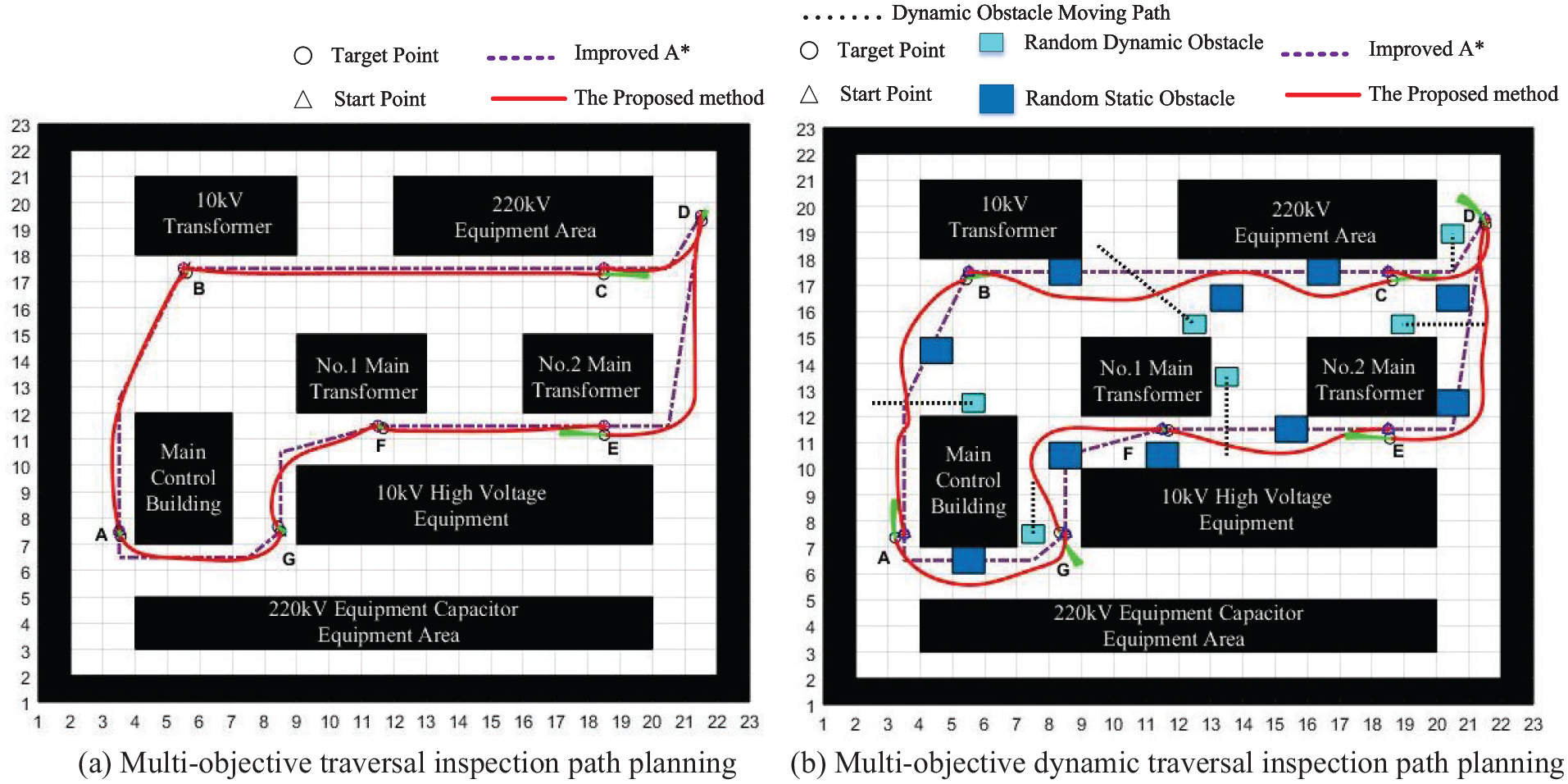
Inspection robot multi-point traversal path planning comparison.
Path planning under emergency condition
To further evaluate substations robot path planability with an improved fusion algorithm, we simulated and analyzed the robot’s dynamic path planning capabilities under emergency conditions.
Figure 6 illustrates that the blue and cyan squares represent random static and dynamic inspection obstacles. The inspection robot begins its task from point A. When performing an inspection at point C, the 10 kV high-voltage equipment at point G experiences an emergency fault. In response, the inspection robot adjusts its path, successfully avoiding both static and dynamic obstructions to reach point G. These results confirm that the fusion algorithm introduced in this study can effectively dynamically plan the inspection path even with random obstacles during emergency tasks, ensuring the inspection robot reaches the destination point. This confirms the algorithm’s superiority and practical applicability.
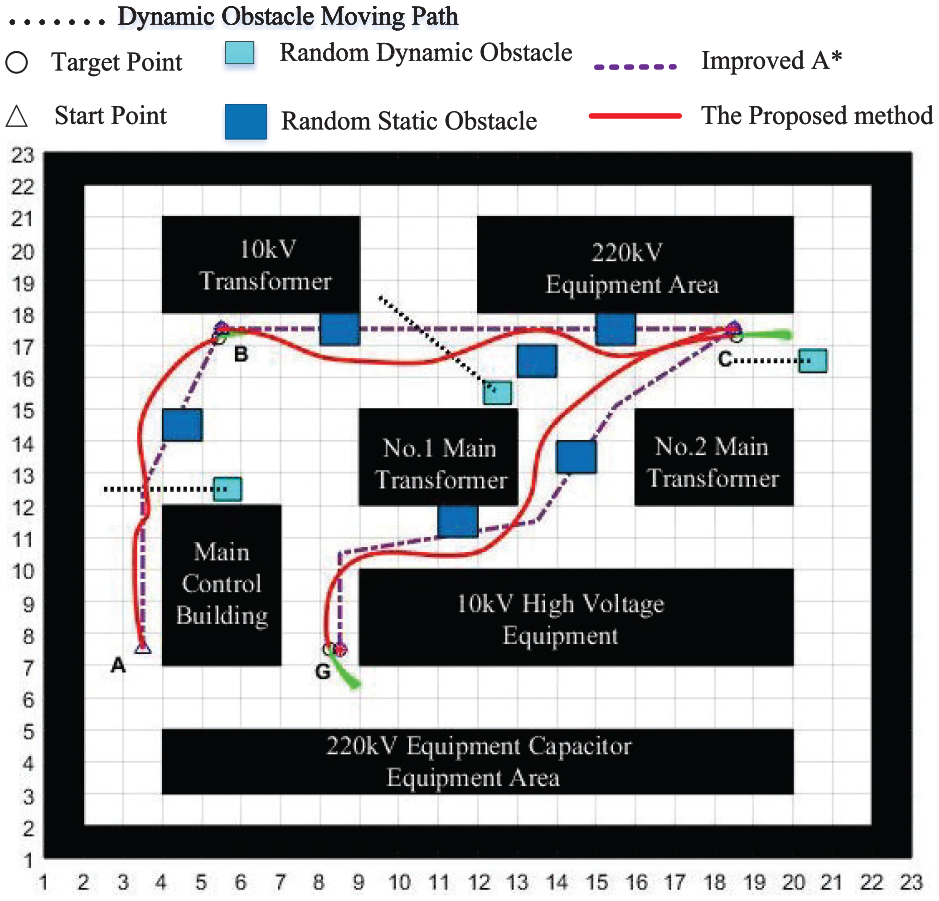
Substation inspection path planning with emergency task.
Conclusion
A proposed method combining an improved A* and an enhanced DWA is used to optimize the path planning performance of substation inspection robots in dynamic environments. Comparative simulations were conducted to analyze the robot’s dynamic path planning capabilities across different scenarios, including fixed-point inspection, multi-target inspection, and emergency conditions, using the traditional A*, improved A*, traditional DWA, enhanced DWA, and the proposed fusion algorithm. Simulation results demonstrate that the intelligent substation inspection robot, utilizing the improved fusion algorithm, successfully completes inspection tasks while significantly reducing path length. Specifically, under fixed-point conditions, the enhanced DWA reduces the inspection path by 14.5% compared to the traditional DWA. Furthermore, the proposed fusion algorithm shortens the path length by 24.4% compared to the traditional A*. The fusion algorithm effectively avoids random obstacles and enables dynamic path planning in emergency conditions, highlighting its efficiency and adaptability.
Footnotes
Author contributions
All authors contributed to the study conception and design, data collection and analysis were performed by Wei Zhang, Wanli Li, Xiang Zheng and Bing Sun. The first draft of the manuscript was written by Wei Zhang and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant 52271321 and Natural Science Foundation of Shanghai under Grant 22ZR1426700.
Data availability
Within the scope of this study, all utilized data and relevant materials are available upon request from the authors.