This paper studies the problem of adaptive sliding mode control (SMC) for discrete time-varying singular systems (DTVSSs) with deception attacks. The deception attacks that make the system unstable are modeled as an unknown nonlinear function. Firstly, some sufficient conditions for ensuring the admissibility with H∞ performance of the system are given. Secondly, a novel method is proposed to solve the controller gain. Thirdly, to estimate the unknown parameter in upper bound of deception attacks, an adaptive SMC law is established to assure that the reachability of sliding surfaces can be achieved and the effect of deception attacks on the system is weakened. Finally, the developed method is verified by two examples.
Singular systems, also known as descriptor systems, are composed of difference (or differential) equations and algebraic equations. Because singular systems can describe many physical systems more widely than state-space systems, such as power systems, chemical processes and circuit systems,1 it has attracted more and more attention. Because both regularity and causality or non-impulse are taken into account, so the study of singular systems is more complicated. In recent decades, the stability analysis, H∞ control, controller design and SMC problem of singular system have been widely discussed.2–6 The finite-time control issue was studied for switched type-2 fuzzy singular systems by output feedback technology, where a novel fuzzy Lyapunov function was chosen to reduce the computational conservatism.2 The dynamic output feedback (DOF) control problem was discussed for singular time-delay systems.3 Park et al.4 were devoted to the filter design problem for MJSS with incomplete transition rates and a necessary and sufficient criterion was developed for the existence of the filter. Zhang et al.5 focused on the asynchronous fault detection filter (FDF) problem for nonlinear singular systems under event-triggered scheme (ETS), where a novel approach was presented to design the FDF gains.
Sliding mode control (SMC), regarded as an important control technology, has become a research hotspot due to its good characteristics including fast response, strong robustness and so on.7 The design method can be divided into the following two steps: Firstly, a suitable sliding mode function that has desirable performance is proposed. Second, the designed controller must ensure that the trajectories of the system can reach the designed sliding surface and stay there. Lots of SMC problems for singular systems and network control systems have been considered.8–11 Han et al.8 discussed the robust SMC problem for discrete singular systems with external disturbances. The problem of robust fuzzy SMC was studied for T-S fuzzy continuous semi-MJSs.9 The authors10 proposed a novel dynamic SMC scheme for stochastic T-S fuzzy time-delay systems and the advantage of the scheme removed the following two constraints: (1) all subsystems share the same input matrix; (2)there exists a matrix such that is nonsingular. Especially in the last decade, the event-triggered SMC problem has been discussed by many scholars.12–15 The problem of observer-based SMC was discussed for T-S fuzzy systems with ETS and bounded external disturbances.12 The observer-based SMC problem was studied for uncertain continuous-time descriptor systems with neural-network ETS.13 The event-triggered SMC dissipative problem was proposed for discrete switched stochastic systems.14
With the development and wide application of network technology, the problem of cyber-attacks has attracted the attention of many scholars and network security has become a very popular research topic. In practice, the transmitted signals are often inevitably attacked because the communication networks are not secure. There are three common types of cyber attacks: replay attacks, deception attacks and DoS attacks. The replay attacks fraudulently repeat the transmitted data. Deception attacks are also called false data injection attacks. For this kind of attack, some false signals are transmitted by the attackers and the most important characteristics of deception attacks are strong concealment and easily implemented. The way of DoS attacks is to make system resources unavailable, which can reduce the system’s performance and even destabilize the system. To mitigate the impact of the cyber attacks on the system, lots of security control methods have been developed.16–20 To mention a few, Meira-Góes et al.16 discussed the security control problem for cyber-physical systems with sensor deception attacks. The problem of the adaptive dynamic surface control was studied for uncertain cyber-physical time-delay systems under deception attacks, where the deception attacks were modeled as a known nonlinear function in Ref.17 The problem of active defense H∞ control was investigated for cyber-physical systems with DoS attacks.18 Zhang et al.19 focused on the problem of secure SMC design for interval type-2 fuzzy systems with DoS attacks. Especially in recent years, lots of results on event-triggered design problem has been reported for network control systems under cyber-attacks.21–25 Liu et al.21 concentrated on the problem of event-based filtering for networked control systems under multiple cyber attacks. The secure H∞ filter problem was proposed for interval type-2 fuzzy systems with aperiodic DoS attacks.22 The secure control problem was discussed for singular MJS under ETS,23,24 in which the cyber attacks are modeled as a known nonlinear function. In the above papers on the deception attacks, it is always assume that the deception attacks are modeled as a known nonlinear function. However, in practice, it is difficult to obtain the accurate information of the attackers, because attackers can usually manipulate the transmitted data. In order to solve this problem, the deception attacks and the perturbation from the control path are modeled as an unknown nonlinear function in Ref.26–32 Zhang et al.26 discussed the input-to-state stabilization problem for type-2 fuzzy systems via sliding-mode technique, where the deception attacks were modeled as an unknown nonlinear function.27 studied the adaptive SMC problem for the cyber-physical systems under the injection attack and ETS. So far, few papers discuss the security adaptive SMC issue for discrete-time singular systems, which stimulates our interest.
Inspired by the above investigation, the problem of adaptive SMC design is studied for DTVSSs with deception attacks in this paper. The contributions are summarized as follows:
Unlike the existing results in Refs.23,24, the deception attacks which make the communication network unreliable are modeled as an unknown nonlinear function.
Some sufficient condition for the admissibility with H∞ performance of the system are obtained and an approach is given to obtain the controller.
Under the effect of deception attacks, an adaptive SMC law is designed to assure the reaching condition of the sliding surface and the effect of deception attacks on the system is effectively weakened.
The rest of this paper is organized as follows. Section II describes the problem formulation. The main results are provides in section III. Two examples are given to show the effectiveness of the design method in section IV. Finally, conclusions are followed in section V.
Notations: shows the Euclidean space with dimensional. indicates that is positive define matrix. represents the transpose of the matrix . and denote the norm of vector and Frobenius norm of matrix, respectively.
Preliminaries and problem formulation
The following DTVSSs is considered
where represents plant, delegates input, means output, and stands for disturbance, is the time-varying delay and satisfies . is a singular matrix and rank . and are known matrices and is of full-column rank.
In practice, the transmitted signals are often inevitably attacked because the network transmission channels are open to the public. In this paper, the real control input under cyber attacks is modeled as
where denotes the captured cyber attacks, stands for an unknown weighting matrix, indicates the system information used by the attacker. In this paper, similar to Ref.26, one assumes that and , where and represent an unknown parameter and a known function, respectively.
Remark 1.In practice, although attackers can usually manipulate the transmitted data, the energy of the injected attack information is limited due to physical constraints. Therefore, it is reasonable to assume that and are bounded.
Then, under cyber-attacks (2), the system (1) can be rewritten as
In this paper, a discrete sliding surface function is constructed
where demands to be designed, is a known matrix so that is nonsingular.
According to the SMC theory, one can obtain
Then, the equivalent control law is given
Substituting (6) into (1), the system (3) is transformed to
where .
Lemma 1.3 For any matrix positive integers and satisfying then
where
Lemma 2.33 If there exist a constant , matrices , , and satisfying
admissible if (i) and (ii) hold and the system (8) is stable.
The main objectives of our work are as follows:
The system (7) with is admissible;
Under zero initial condition, performance can be obtain:
where .
Main results
A sufficient condition is derived to ensure that the system (7) is admissible with desired performance.
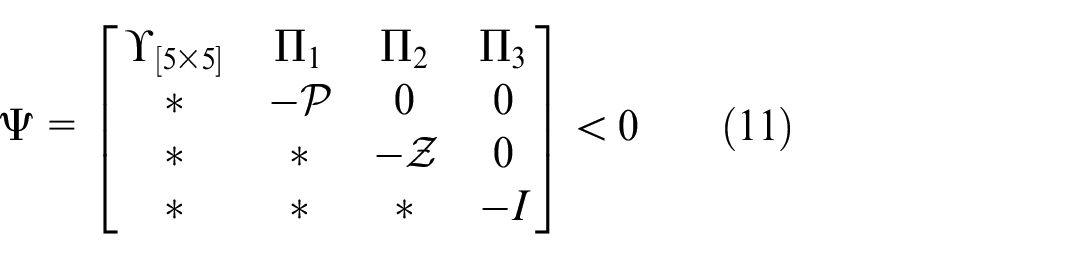
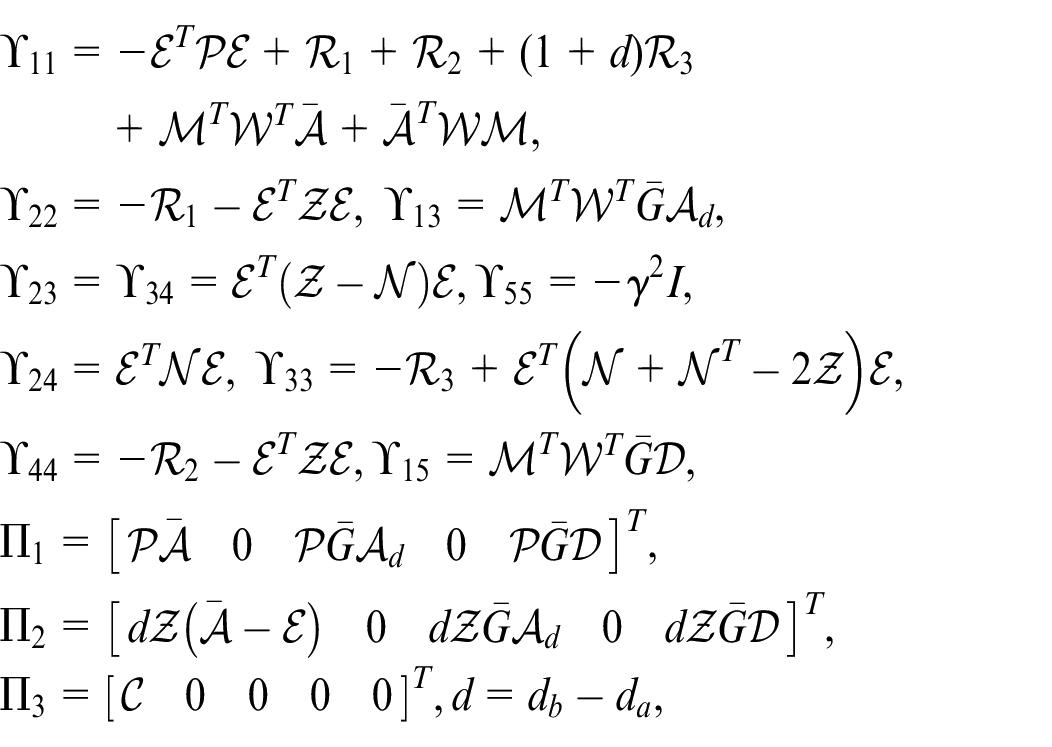
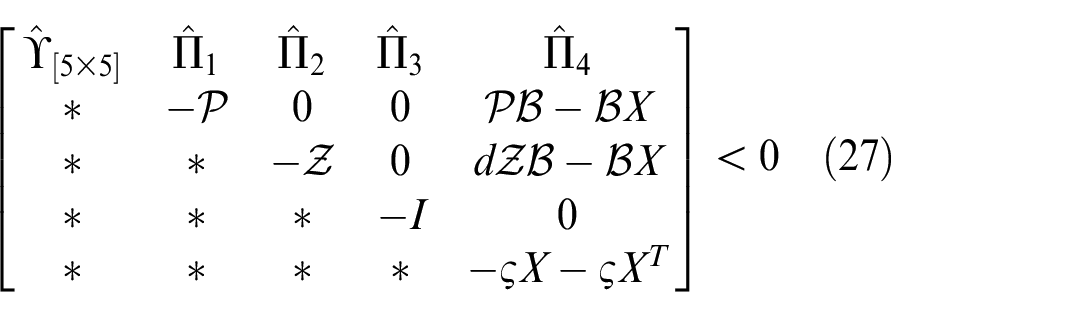
Theorem 1.For given scalars the system (7) is admissible with performance if there exist and such that
where
and is a constant matrix satisfying .
Proof. First of all, the regular and causal of the system (7) will be proved.
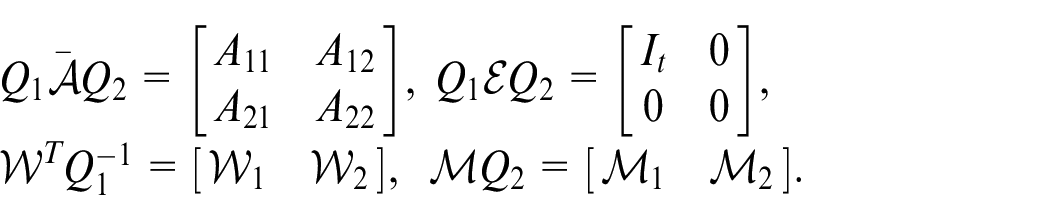
Because rank, there exist invertible matrices and such that
It can be seen from that .
Since and , one has
(12) pre- and post-multiplying and , respectively, one can obtain
which implies that is nonsingular. Thus, the system (7) is regular and causal.
Next, we will prove that the system (7) is stable.
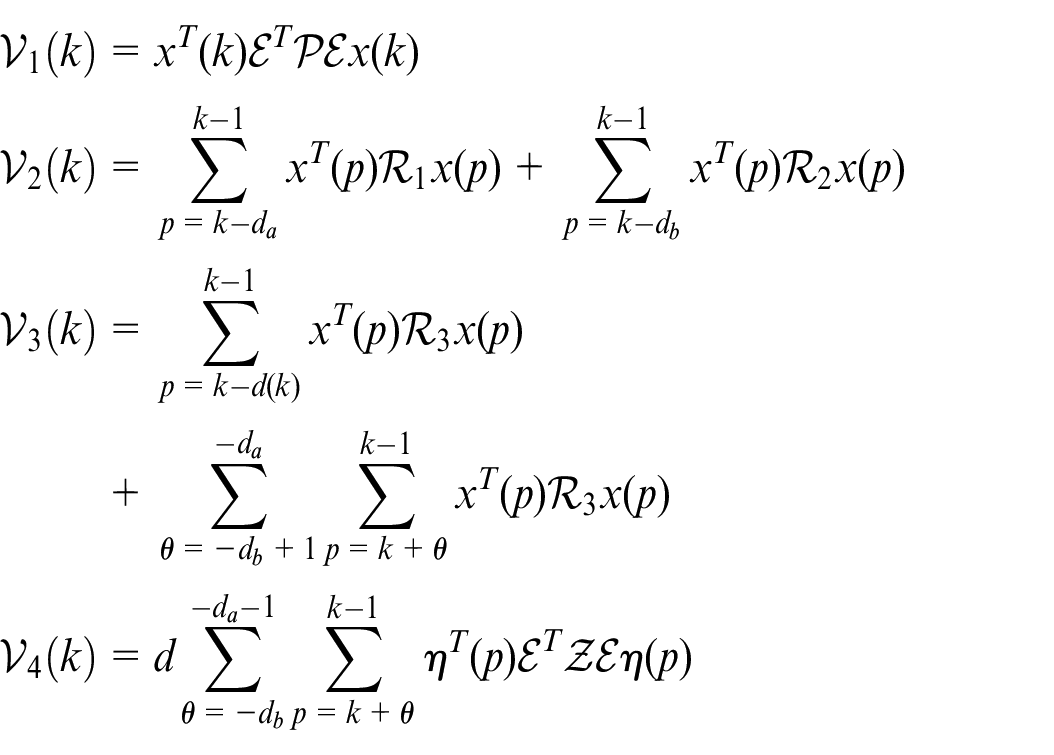
The following Lyapunov-Krasovskii functional is chosen:
where
Define , it yields
Applying Lemma 1 to (18), one gets
where ,
Since , one has
Considering performance and combining (15)–(20), one can get
where
By Schur complement and (11), one has
Define
Under zero initial condition, one can get
Then, (9) holds, for any .
When and from (22), one gets
□
Then, the stability of the system (7) is proved. This completes the proof.
Next, a novel approach is developed to solve the controller.
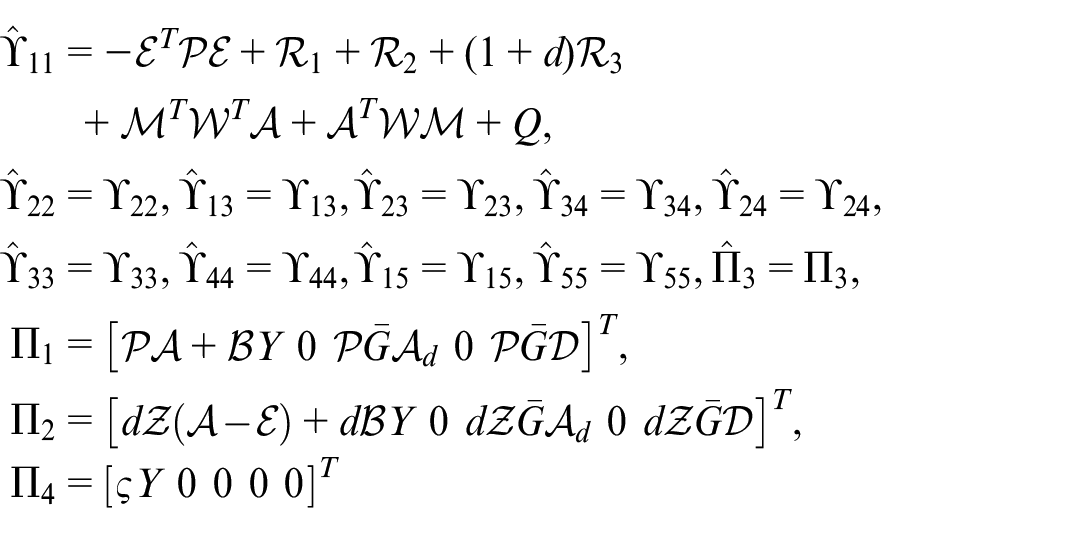
Theorem 2.For given scalars the system (7) is admissible with performance if there exist and nonsingular matrix such that
where
and is a constant matrix satisfying .
Furthermore,, the controller is given as .
Proof. By applying Lemma 2 to (26) with , it yields
Further employing Lemma 2 to (27), one can get that (11) holds if (27) holds. The proof is completed.□
In practice, it is difficult to determine the upper bound of the , because attackers can usually manipulate the transmitted data. Next, an adaptive SMC law is given to assure the reaching condition of the sliding surface.
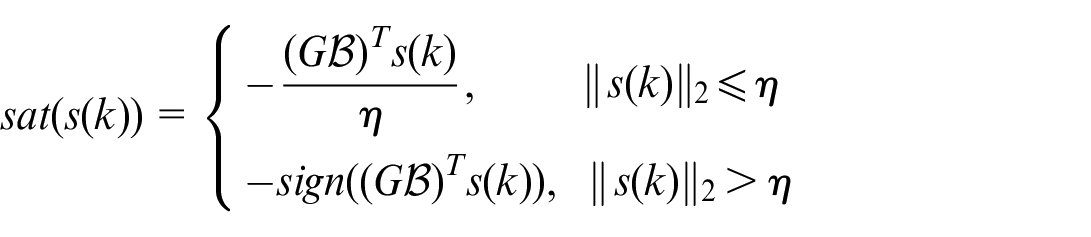
Theorem 3.Consider the system (1) and the sliding surface function (4), the adaptive SMC law is given as
with
where is a known positive constant, and . Then, the system states can be forced onto the predefined sliding surface.
Proof. Choose the following Lyapunov functional
where .
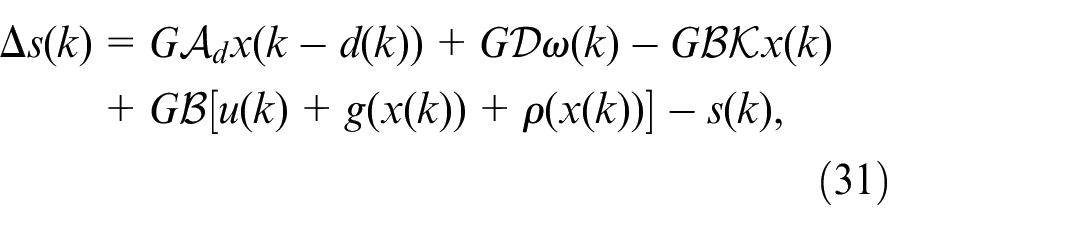
Recalling (1) and (4), one has
where .
Considering (3) and (4), one has
and
Considering the above equations, it yields
When one gets
When similar to the above, one has
Based on the above analysis, one can choose such that when can be within a bounded area containing the equilibrium point. The designed sliding surface can be reached. The proof is completed.□
In adaptive SMC law (29), the upper bound of the is unknown, that is, is unknown. Suppose is known, the following SMC law is developed.
Corollary 1.Consider the system (1) and the sliding surface function (4), the SMC law is given as
with
where is a known positive constant and . Then, the system states can be forced onto the predefined sliding surface.
Algorithm 1. The design procedure is outlined as follows.
(1) Choose matrix such that is nonsingular.
(2) By using Theorem 2 and the Matlab, the controller , the positive matrices are solved.
(3) Design the sliding function by (4) and the adaptive SMC law by (29), where adaptive laws are designed in Theorem 3.
Numerical examples
Two examples are given to show the effectiveness of the proposed method in this section.
Example 1. Consider the systems (1) with the following parameters:
Let , , , , and . By Theorem 2, the controller gain is given
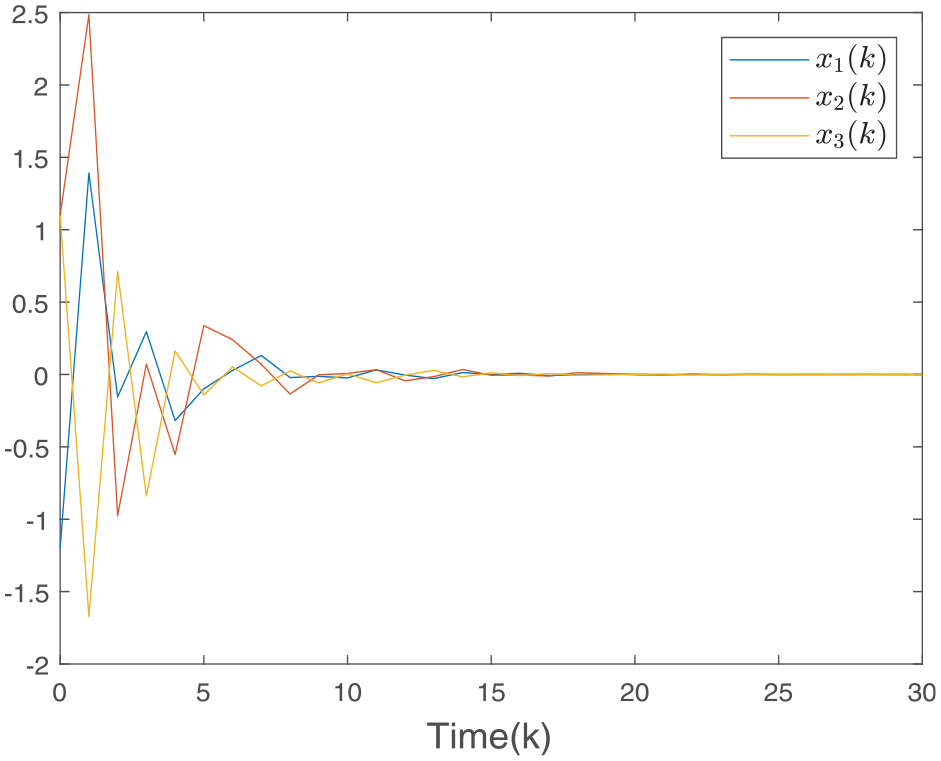
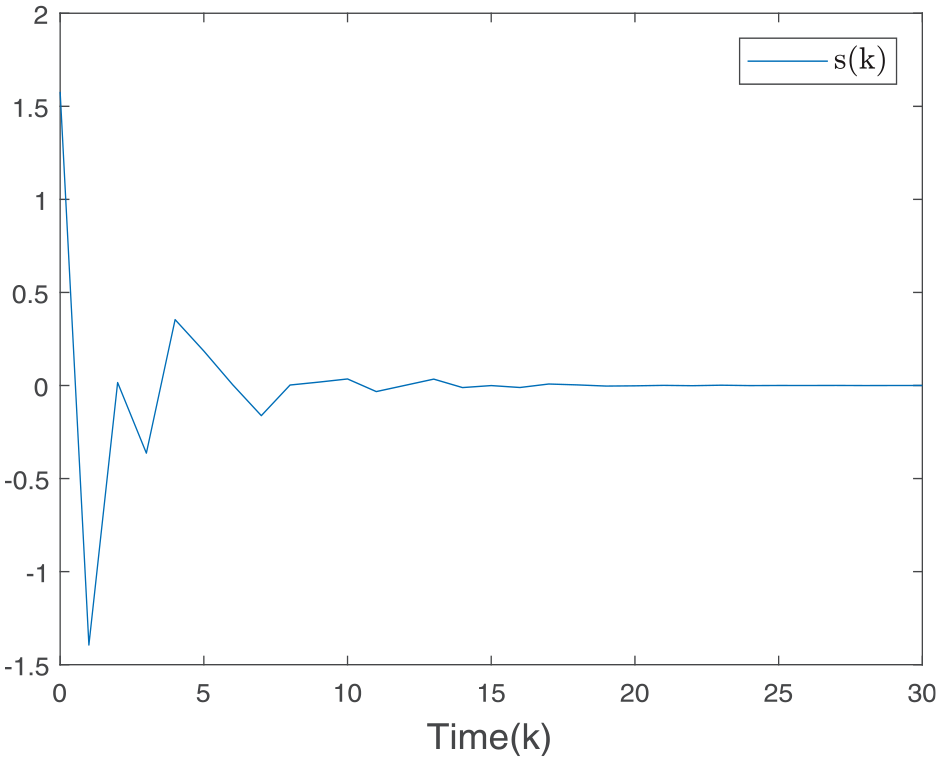
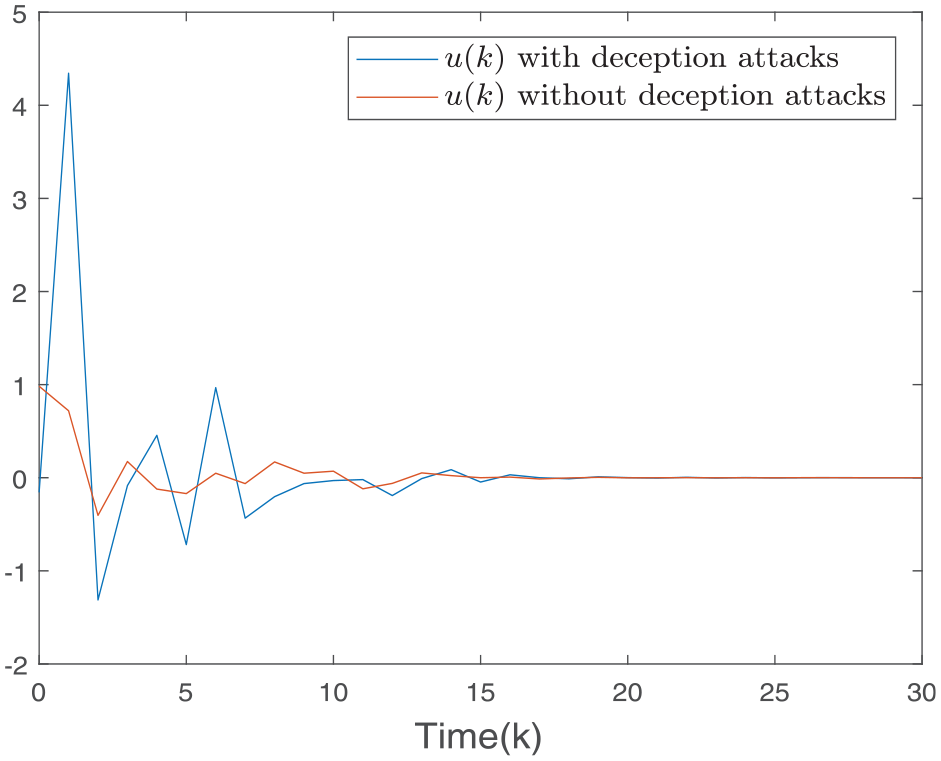
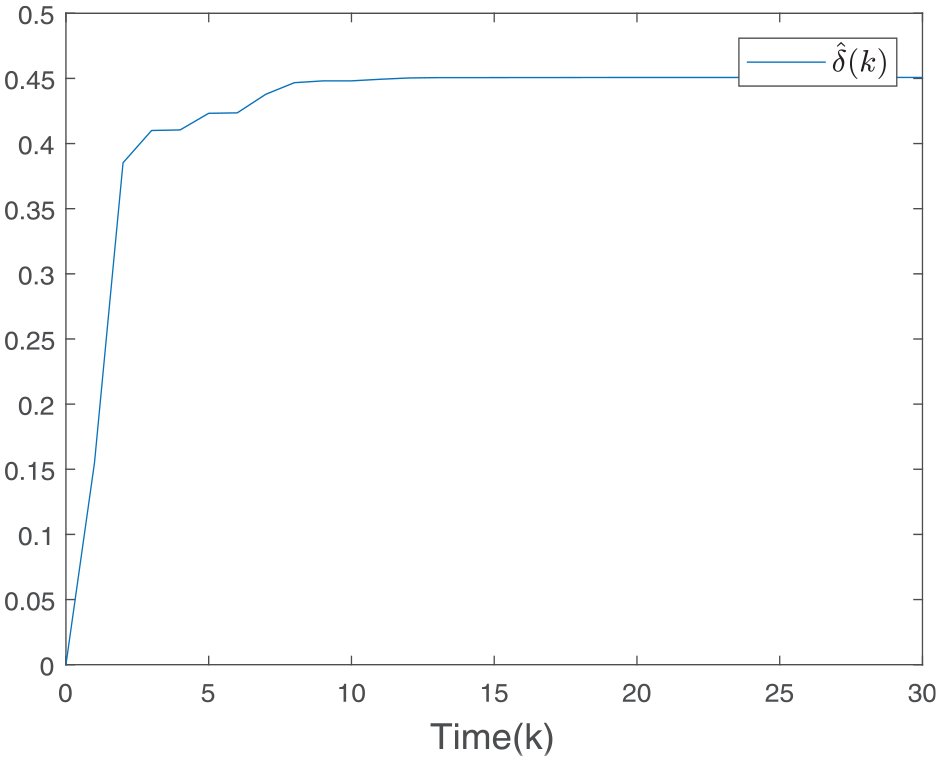
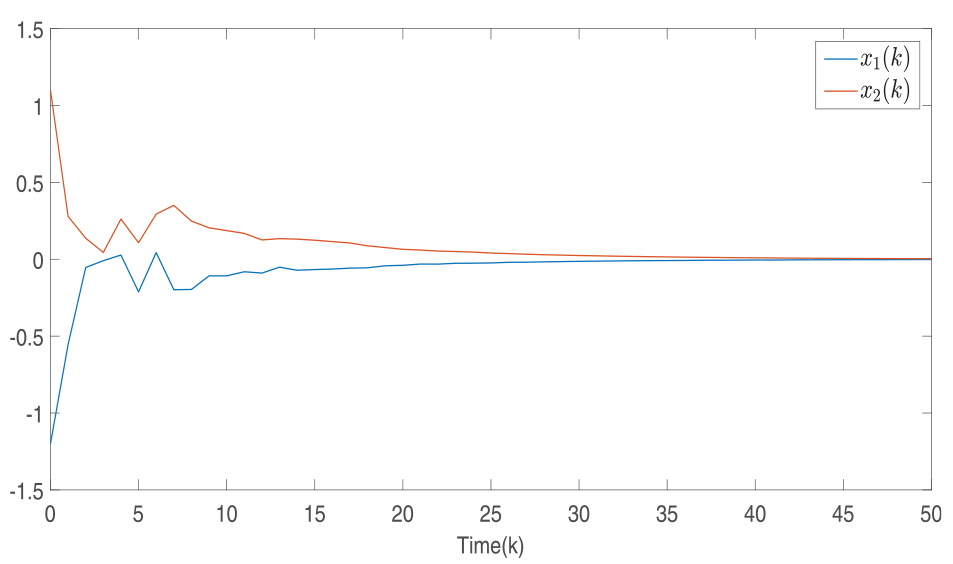
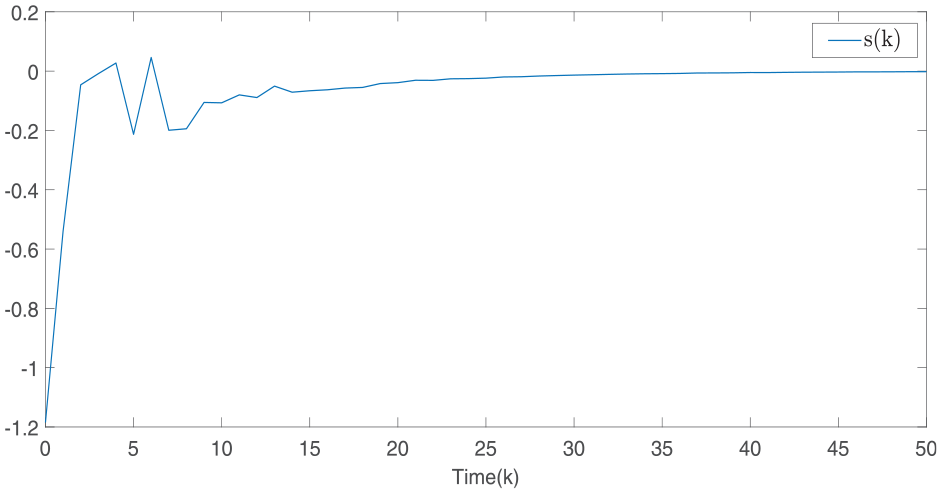
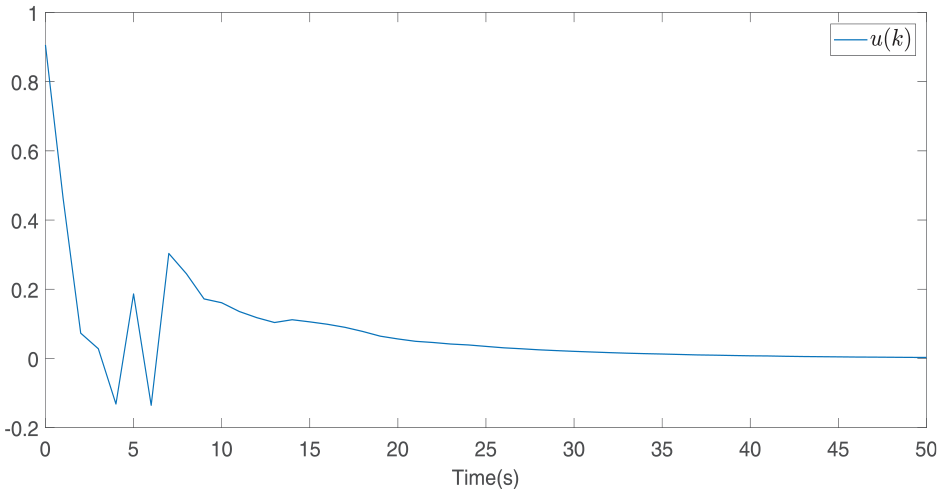
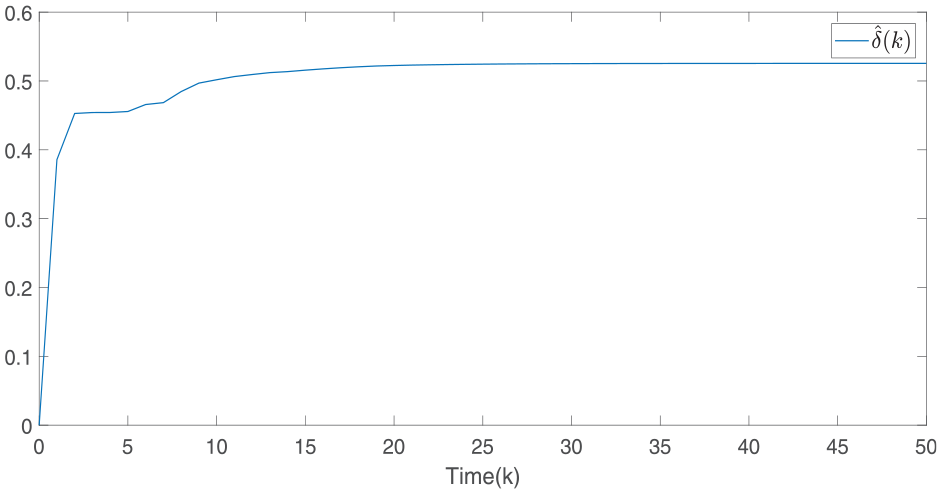
Supposes . Figures 1 to 4 give the simulation results. Figure 1 depicts the system trajectories. Figure 2 shows the sliding surface function (4). Figure 3 plots the SMC input with deception attacks and without deception attacks, respectively. From Figure 3, although the deception attacks had a significant impact on the SMC input , the SMC input ultimately ensured the stability of the system. Figure 4 depicts the estimation values of . Compared with Ref.8 the advantages of the method proposed are as follows: (1) the overall system under the deception attacks is admissible; (2) the design method can effectively eliminate the impact of the deception attacks.
Example 2. A dynamic Leontief model of economic systems34 is considered, which can be modeled as system (1):
States trajectories of Example 1.
Sliding surface of Example 1.
SMC input of Example 1.
The estimation of the attacks of Example 1.
Let , , , , and . By Theorem 2, the optimal and the controller gain is given
Supposes . Figures 5 to 8 depict the simulation results. Figure 5 shows the system trajectories. Figures 6 and 7 describe the sliding surface function (4) and the SMC input (29), respectively. Figure 8 depicts the estimation values of . Above all, the simulation results can prove that the proposed approach is effective.
States trajectories of Example 2.
Sliding surface of Example 2.
SMC input of Example 2.
The estimation of the attacks of Example 2.
Conclusion
The problem of adaptive SMC design has been studied for DTVSSs with deception attacks, where the deception attacks that make the system unstable are modeled as an unknown nonlinear function. Firstly, some sufficient conditions are given for the system to be admissible with desired performance. Secondly, a novel method is given to solve the controller gain. Thirdly, an adaptive SMC law is constructed to assure that the reachability of sliding surface can be achieved. At last, simulation results have demonstrated that the proposed approach is effective. In the future, we will further discuss the problem of asynchronous adaptive SMC for SMJSs via ETS.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by National Natural Science Foundation of China (62373238).
ORCID iD
Qian Zhang
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
1.
XuSLamJ.Robust stability and stabilization of discrete singular systems: an equivalent characterization. IEEE Trans Automat Contr2004; 49(4): 568–574.
2.
LvCChenJLvX, et al. Finite-time H∞ control for interval type-2 fuzzy singular systems via switched fuzzy models and static output feedback. Nonlinear Anal Hybrid Syst2022; 45: 101206.
3.
LongSZhongS.H∞ control for a class of singular systems with state time-varying delay. ISA Trans2017; 66: 10–21.
4.
ParkCEKwonNKParkIS, et al. H∞ filtering for singular Markovian jump systems with partly unknown transition rates. Automatica2019; 109: 108528.
5.
ZhangQYanHWangM, et al. Asynchronous fault detection filter design for T–S fuzzy singular systems via dynamic event-triggered scheme. IEEE Trans Fuzzy Syst2023; 31(3): 970–981.
6.
CaoWQiaoJJ.Robust iterative learning control for random switched singular systems in time domain. Meas Control2023; 56(5-6): 1114–1125.
7.
ZhangJXiaY.Design of static output feedback sliding mode control for uncertain linear systems. IEEE Trans Ind Electron2010; 57(6): 2161–2170.
8.
HanYKaoYGaoC.Robust sliding mode control for uncertain discrete singular systems with time-varying delays and external disturbances. Automatica2017; 75: 210–216.
9.
JiangBKarimiHRKaoY, et al. A novel robust fuzzy integral sliding mode control for nonlinear semi-Markovian jump T–S Fuzzy Systems. IEEE Trans Fuzzy Syst2018; 26(6): 3594–3604.
10.
GaoQFengGXiZ, et al. A new design of robust H∞ sliding mode control for uncertain stochastic T-S fuzzy time-delay systems. IEEE Trans Cybern2014; 44(9): 1556–1566.
11.
SuYYangDRenJ.Event-triggered H∞ sliding mode control for discrete-time singular Markov jump systems with uncertainties in the difference matrix. Circuits Syst Signal Process2024; 43(8): 4764–4789.
12.
WenYJiaoCSuX, et al. Event-triggered sliding-mode control of networked fuzzy systems with strict dissipativity. IEEE Trans Fuzzy Syst2022; 30(5): 1371–1381.
13.
WangYZhangTRenJ, et al. Observer-based event-triggered sliding mode control for uncertain descriptor systems with a neural-network event-triggering sampling scheme. Neurocomputing2020; 385: 319–328.
14.
LiuJWuLWuC, et al. Event-triggering dissipative control of switched stochastic systems via sliding mode. Automatica2019; 103: 261–273.
15.
LiWNiuYCaoZ.Event-triggered sliding mode control for multi-agent systems subject to channel fading. Int J Syst Sci2022; 53(6): 1233–1244.
16.
Meira-GóesRKangEKwongRH, et al. Synthesis of sensor deception attacks at the supervisory layer of Cyber–Physical Systems. Automatica2020; 121: 109172.
17.
YooSJ.Neural-network-based adaptive resilient dynamic surface control against unknown deception attacks of uncertain nonlinear time-delay cyberphysical systems. IEEE Trans Neural Netw Learn Syst2020; 31(10): 4341–4353.
18.
WuCWuLLiuJ, et al. Active defense-based resilient sliding mode control under denial-of-service attacks. IEEE Trans Inf Forensics Secur2020; 15(1): 237–249.
19.
ZhangZNiuYZhaoH.Secure sliding mode control of interval type-2 fuzzy systems against intermittent denial-of-service attacks. Int J Robust Nonlinear Control2021; 31(6): 1866–1884.
20.
QiWHouYParkJH, et al. SMC for discrete-time networked semi-Markovian switching systems with random dos attacks and applications. IEEE Trans Syst Man Cybern Syst2023; 53(3): 1982–1993.
21.
LiuJYangMXieX, et al. Finite-time H∞ filtering for state-dependent uncertain systems with event-triggered mechanism and multiple attacks. IEEE Trans Circuits Syst2020; 67(3): 1021–1034.
22.
HuSYueDDouC, et al. Attack-resilient event-triggered fuzzy interval type-2 filter design for networked nonlinear systems under sporadic denial-of-service jamming attacks. IEEE Trans Fuzzy Syst2022; 30(1): 190–204.
23.
XingMWangYZhuangG, et al. Dynamic event-based dissipative asynchronous control for T–S fuzzy singular Markov jump LPV systems against deception attacks. Nonlinear Dyn2021; 103(2): 1709–1731.
24.
LiJSuoYChaiS, et al. Resilient and event-triggered control of singular Markov jump systems against cyber attacks. Int J Syst Sci2024; 55(2): 222–236.
25.
XuYFangMWuZG, et al. Input-based event-triggering consensus of multiagent systems under denial-of-service attacks. IEEE Trans Syst Man Cybern Syst2020; 50(4): 1455–1464.
26.
ZhangZNiuYSongJ.Input-to-state stabilization of interval type-2 fuzzy systems subject to cyberattacks: an observer-based adaptive sliding mode approach. IEEE Trans Fuzzy Syst2020; 28(1): 190–203.
27.
XueYRenWZhengBC, et al. Event-triggered adaptive sliding mode control of cyber-physical systems under false data injection attack. Appl Math Comput2022; 433: 127403.
28.
LinWZhangBYaoD, et al. Adaptive neural sliding mode control of Markov jump systems subject to malicious attacks. IEEE Trans Syst Man Cybern Syst2021; 51(12): 7870–7881.
29.
CaoZNiuYZouY.Adaptive neural sliding mode control for singular semi-Markovian jump systems against actuator attacks. IEEE Trans Syst Man Cybern Syst2019; 51(3): 1–11.
30.
DongSXieKChenG, et al. Extended dissipative sliding-mode control for discrete-time piecewise nonhomogeneous Markov jump nonlinear systems. IEEE Trans Cybern2022; 52(9): 9219–9229.
31.
JiangBKarimiHRLiB.Adaptive sliding mode control of Markov jump systems with completely unknown mode information. Int J Robust Nonlinear Control2023; 33(6): 3749–3763.
32.
ZhongZLamHKBasinMV, et al. Fuzzy neural network-based adaptive sliding-mode descriptor observer. IEEE Trans Fuzzy Syst2024; 32(6): 3342–3354.
33.
ZhouJParkJHKongQ.Robust resilient L2−L∞ control for uncertain stochastic systems with multiple time delays via dynamic output feedback. J Franklin Inst2016; 353(13): 3078–3103.
34.
SteengeAE.Instability problems in the dynamic Leontief model: an economic explanation. Econ Syst Res1990; 2(4): 357–362.