
Abstract
In the field of mobile robot path planning, the artificial potential field (APF) method has been widely researched and applied due to its intuitiveness and efficiency. However, the APF algorithm often encounters challenges such as local minima and unreachable goals in complex environments. To address these issues, this paper proposes innovative path planning algorithm that integrates the advantages of the probabilistic roadmaps method (PRM), by introducing Sobol sampling and elliptical constraints to enhance PRM. The improved PRM not only reduces redundant nodes but also enhances the quality of sampling points. Furthermore, this paper uses the path nodes from the improved PRM as virtual target points for the APF algorithm, and effectively solves the inherent flaws of the APF algorithm through the segmented processing of the attractive force function and the introduction of a relative distance factor in the repulsive force function. Simulation results show that the algorithm reduces planning time, node count, and path length, demonstrate significant improvements in efficiency and performance. In addition, experiments with omnidirectional mobile robots further confirm the effectiveness and reliability of the algorithm in practical applications.
Introduction
In today’s rapidly developing era of intelligence, the innovation of mobile robot technology is progressively transforming key areas such as industry, healthcare, and services.1–3 These robots, when performing complex tasks such as automated production lines, hospital guidance, and precise disinfection in public spaces, require efficient and reliable path planning. Accurate path planning not only improves work efficiency but also significantly enhances safety and economy. However, existing path planning algorithms often struggle to meet the requirements of real-time and accuracy when facing complex environments with multiple obstacles. 4 These challenges necessitate the development of more advanced algorithms to ensure that mobile robots have stronger adaptability and flexibility in a variety of practical application scenarios. Commonly used path planning algorithms for mobile robots include the A* algorithm,5,6 probabilistic roadmaps method (PRM),7,8 rapidly-exploring random trees (RRT) algorithm, 9 artificial potential field (APF),10,11 and ant colony optimization (ACO). 12 Each of these algorithms presents its own set of strengths and weaknesses.
The APF method has gained widespread application in the field of obstacle avoidance path planning for mobile robots, attributed to its straightforward principles, high real-time performance, and ease of integration with other algorithms. 13 However, the APF method suffers from issues such as goal unreachability and local minima. To address these issues, a novel triangular navigation approach was introduced in the literature, 14 which solves the problem of local optimal traps under conditions of null resultant force in various path planning methods. For the unreachable target issue, an innovative target attraction model was formulated based on the distance of obstacles, which accelerates convergence. Additionally, a target factor was integrated to optimize the repulsion force function. In the literature, 15 an improved artificial potential field (IAPF) method integrated with Bug2 was proposed for dynamic obstacle avoidance of mobile robots. This method eliminated trajectory oscillation and avoided obstacle avoidance failure when encountering complex obstacles. In the literature, 16 to address the shortcomings of the APF method’s susceptibility to local minima and the RRT’s high computational and spatial costs, an integration of these two algorithms was proposed. Within the RRT algorithm space, an enhanced APF model was formulated, underpinned by a geometric probability model, to augment the target directionality of the RRT. The simulation outcomes demonstrated that the integrated algorithm offered substantial benefits in terms of path length and execution time. Tian et al. 17 presented an artificial potential field-based probabilistic roadmap (APF-PRM) algorithm. It uses the potential field algorithm to model the off-road environment and evaluate vehicular traffic risks. Subsequently, utilizing the multi-dimensional traffic costs between path nodes as the goal, it adopts the probabilistic roadmap method for path planning. This methodology is capable of generating viable, secure, and efficient routes in intricate off-road scenarios.
Although the above solutions can effectively address the inherent shortcomings of the APF method, they do not adequately account for the limitations of the integrated algorithms themselves, such as the slow expansion speed of the RRT algorithm and the large number of redundant nodes in PRM. This paper proposes an innovative path planning algorithm that combines the PRM with the APF, significantly enhancing the path planning capabilities of mobile robots in complex environments. The principal innovations encompass:
a. Incorporation of Sobol sampling: The efficient application of Sobol sampling to the PRM algorithm, optimizing the distribution of sampling points, reducing redundant nodes, and thereby improving the efficiency and quality of path planning.
b. Innovative application of elliptical constraints: By introducing elliptical constraints, the layout of sampling points is refined, making them more concentrated in the effective area from the starting point to the destination, reducing the consumption of computing resources.
c. IAPF: The gravitational and repulsive force functions of the APF algorithm have been innovatively improved, effectively solving the problems of local minima and unreachable goals, and enhancing the success rate of the algorithm.
d. Strategy of algorithm integration: The proposed IPRM-IAPF algorithm, by integrating the improved PRM and APF algorithms, not only utilizes the global path planning capabilities of PRM but also leverages the obstacle avoidance advantages of APF in complex environments.
This study not only provides novel perspectives and methodologies to the domain of mobile robot path planning but also lays a solid theoretical and practical foundations for the future research and application of related algorithms. We believe that the results of this research will bring significant performance improvements and expand the potential applications of mobile robots in real-world scenarios.
Improved artificial potential field method
Traditional artificial potential field method
The APF method conceptualizes the movement of a mobile robot in a planning space as force-driven motion within a virtual force field. It constructs repulsive force fields around obstacles and an attractive force field near the target. The superposition of the repulsive and attractive force fields forms a composite field. Within this composite field, the mobile robot is subject to the combined force of the target’s attraction and the obstacles’ repulsion, guiding it to move from high potential energy to low potential energy, thereby exploring a collision-free path.


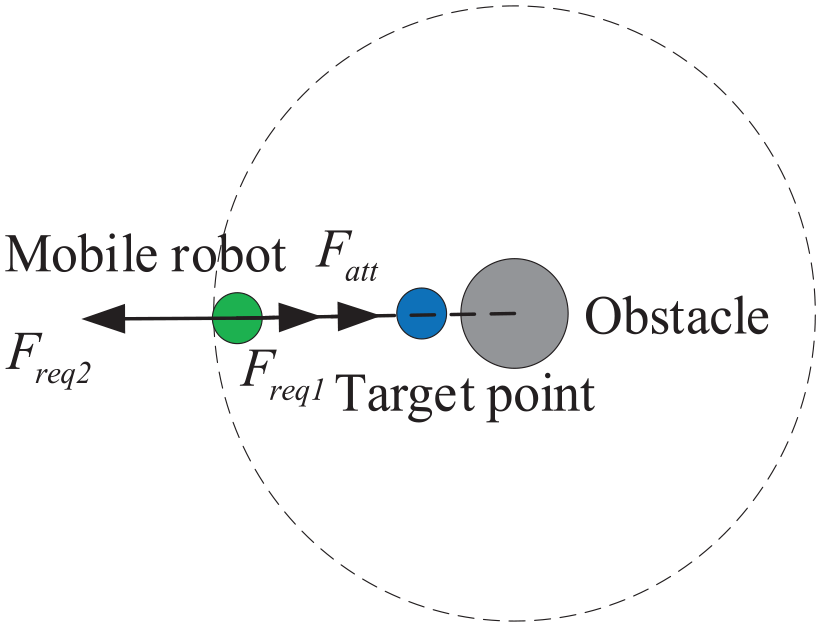
Equation (1) represents the attractive force towards the target. Equation (2) represents the repulsive force from obstacles. Equation (3) represents the combined force of the two. This combined force drives the mobile robot towards the target point, as shown in Figure 1. Outside the range of the obstacle’s repulsive force, the driving force acting on the mobile robot is solely the attractive force F att . However, when the mobile robot enters the range of the obstacle’s repulsive force, it is subject to the combined effect of the repulsive force F req from obstacles and the attractive force F att towards the target, moving in the direction of the combined force.
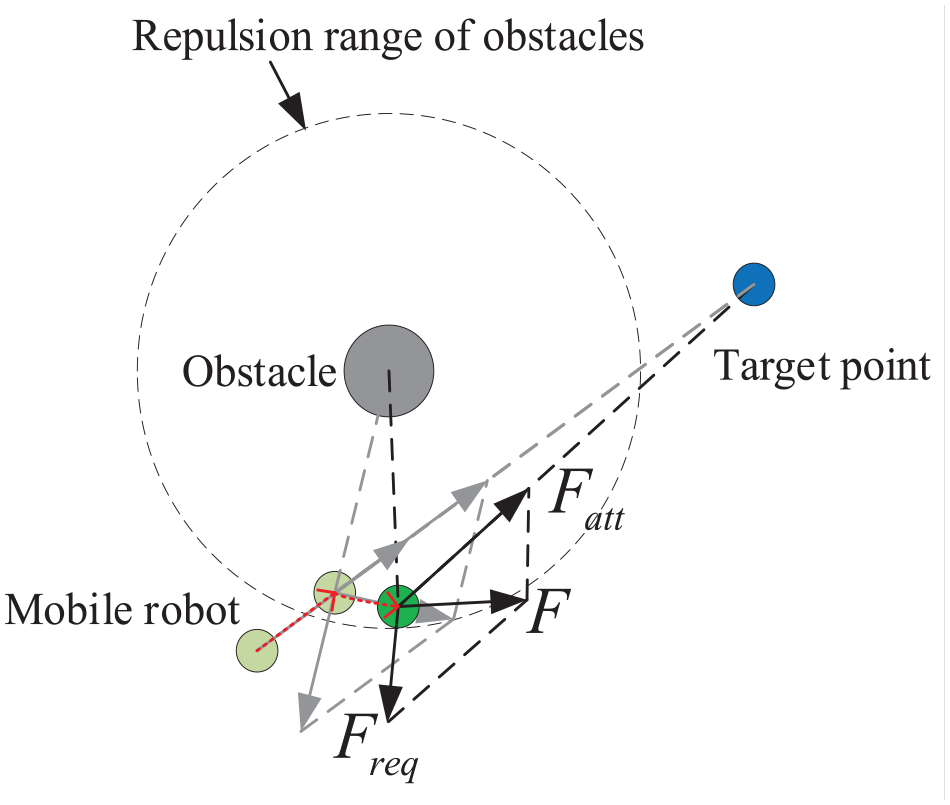
Force diagram of mobile robot.
Deficiencies of artificial potential field method
Local minimum problem
During the process of a mobile robot moving towards a target, there may be a moment when the repulsive force of obstacles and the attractive force of the target are exactly equal in magnitude but opposite in direction. At this point, the net force driving the robot to move becomes zero, and the robot is unable to continue moving. This situation is illustrated in Figure 2(a) and (b).
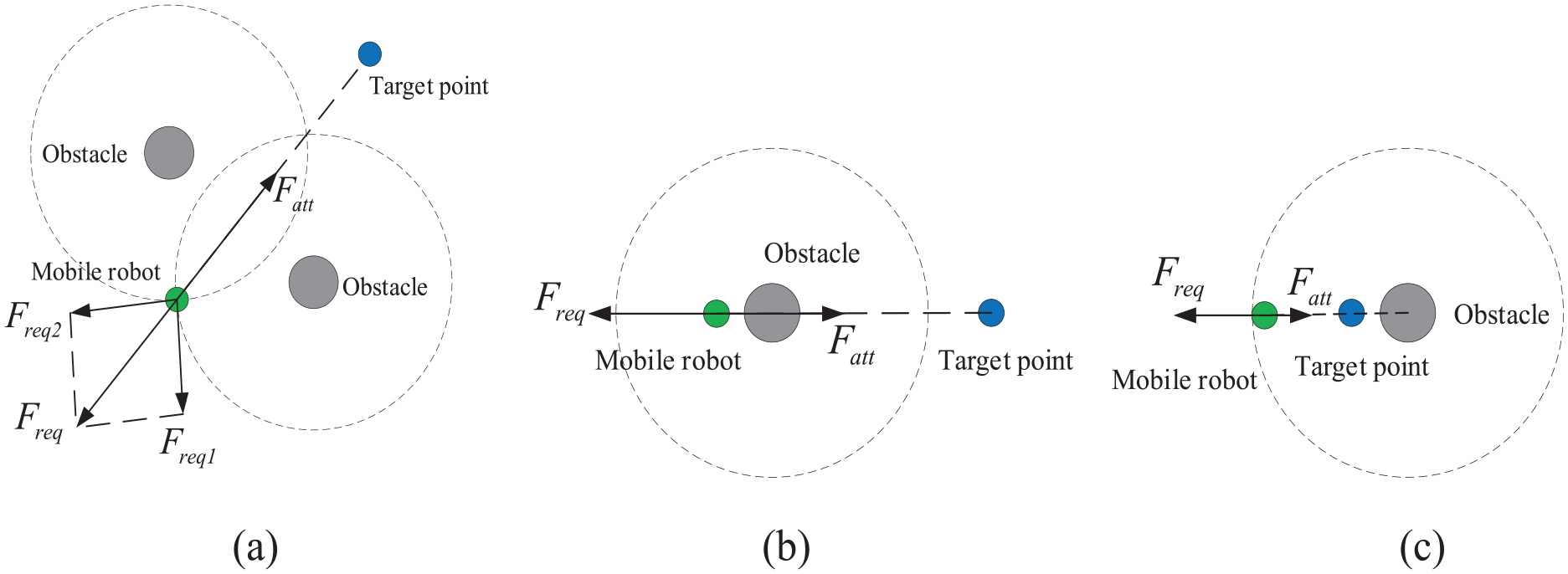
Inherent defects of APF method.
Unreachable target issue
From Equations (1) and (2), it can be seen that as the mobile robot gets closer to the target, the attractive force from the target decreases, while the repulsive force from obstacles increases as the robot gets closer to them. As shown in Figure 2(c), the presence of obstacles near the target can subject the robot to their repulsive force. Here, both a deficient attractive force and an overpowering repulsive force can impede the robot’s progress toward the target.
Improved artificial potential field method
To address the issue of unreachable target caused by insufficient attractive force, this paper proposes an improvement to the attractive potential field function. Through segmented processing, the Euclidean distance p g between the mobile robot and the target when the robot falls into the unreachable state is used to adjust the size of the strong attractive force range. The formula is:
By taking the negative gradient of Equation (4), the gravitational function can be obtained:
Where, both K
att
and T
att
are gravitational coefficients, and
For the scenario depicted in Figure 2(c), this paper introduces a distance factor between the mobile robot and the target into the repulsive potential field function. As the Euclidean distance between the mobile robot and the target point decreases, the repulsive force from obstacles also decreases, thus reducing the repulsive effect of obstacles near the target to a certain extent. The improved repulsive potential field function and repulsive force function are as follows:
Calculate the negative gradient of Equation (6) to obtain the repulsion function:


Where, K
req
is a positive proportional gain coefficient.
The force situation of the improved algorithm.
The comparison between the improved algorithm and the traditional algorithm are shown in Figure 4(a) and (b), where it can be seen that the improved algorithm can reasonably solve the problem of the goal being unreachable in the APF method.
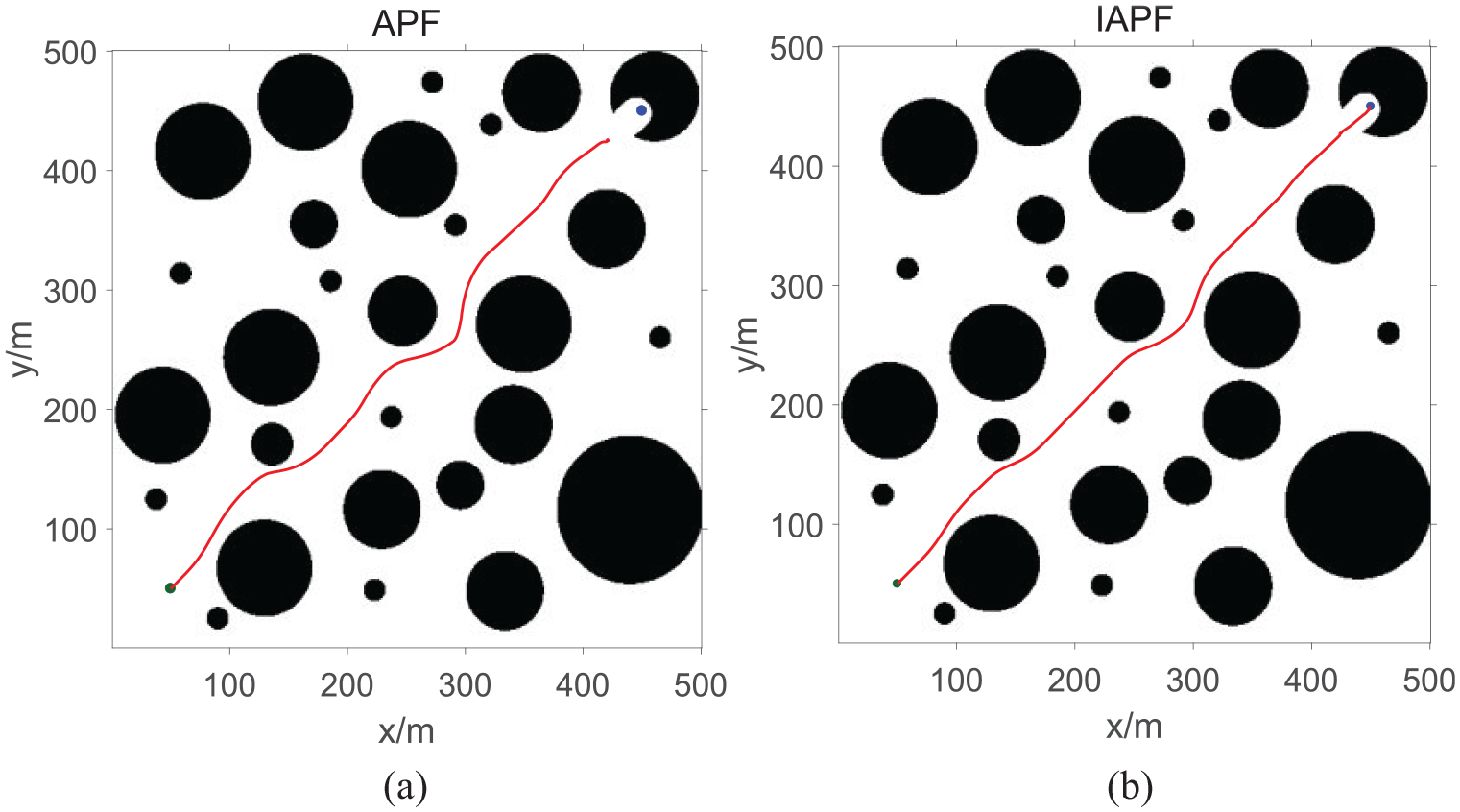
Comparison between APF and IAPF. (a) APF. (b) IAPF.
IPRM
Zheng et al. proposed an APF-PRM, which combines APF and PRM to plan paths in complex static radiation environments, ensuring the safety of workers. 18 However, as the working principle of the PRM algorithm shows, the most efficiency-affecting phase in the PRM algorithm is the query phase. If only the optimal path is considered as the criterion, the method should densely populate the entire constrained space with as many feasible sampling points as possible during the learning phase, which fall in the free space and not on obstacles. Subsequently, feasible sampling points are then grouped into set N. By connecting the feasible sampling points and discarding connections that pass through obstacles, a network path is constructed, as depicted in Figure 5(a) and (b).
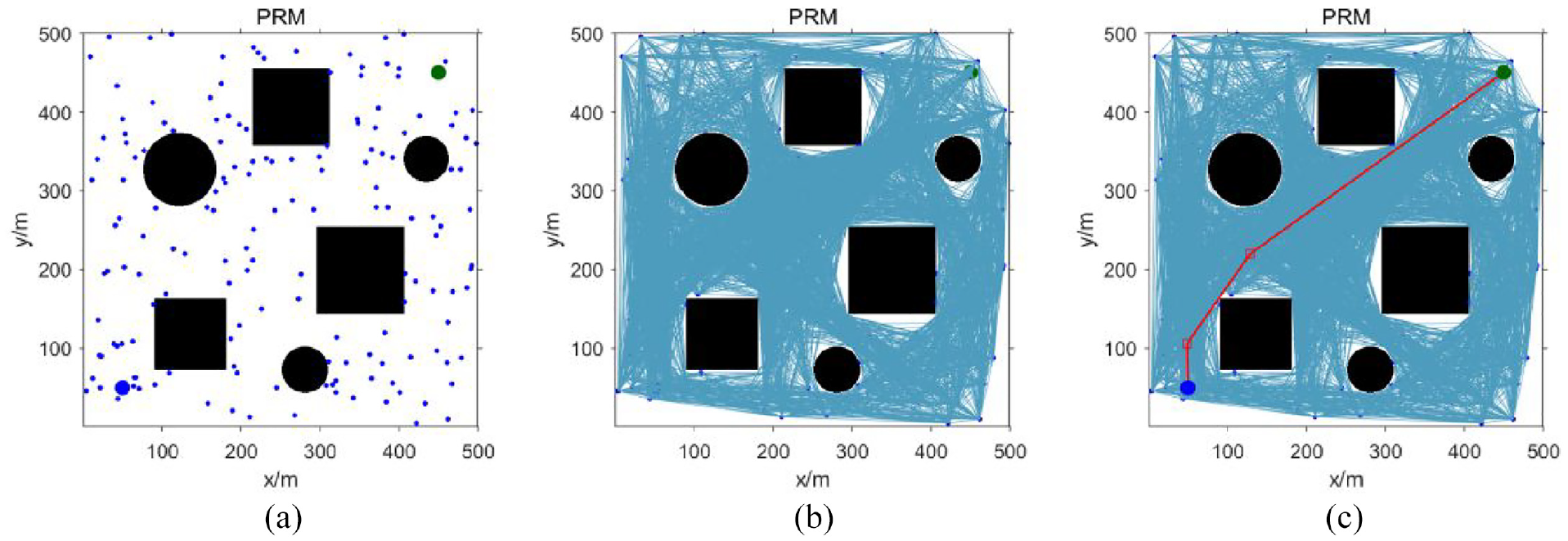
The process of PRM algorithm. (a) Sampling graph. (b) Network path graph. (c) Final optimized path graph.
During the query phase, the feasible sampling points and their adjacent points along feasible paths are grouped into set E. Based on the cost function of the A* algorithm, as shown in equation (10), each feasible sampling point is evaluated for its path, leading to the determination of the optimal path.

Where, g(q) represents the path cost from the start point to the current point. h(q) is the estimated cost, representing the Euclidean distance between the current point and the target point. f(q) represents the total path cost, and when f(q) is minimized, the current sampling point is considered the optimal path node. This node is then set as the current node, and the surrounding adjacent nodes continue to be evaluated until the target point is found. As shown in Figure 5(c), the red line represents the optimal path. Performing path queries on a large number of redundant nodes to obtain the optimal path undoubtedly reduces the efficiency of path planning.
To address the issue of redundant nodes in the PRM algorithm, this paper proposes changing random sampling to Sobol sequence sampling and adding an elliptical constraint to optimize the distribution of sampling points, reduce redundant nodes, and improve the efficiency of path planning.
The Sobol sequence19,20 is a low-discrepancy sequence belonging to the Quasi-Monte Carlo (QMC) method. 21 Compared to Monte Carlo random number sequences, Sobol sequences focus more on generating a uniform distribution in the probability space, exhibiting good ergodicity and being unaffected by population size. Its sampling speed is fast, and its computational efficiency is higher for high-dimensional sequences. Therefore, this paper uses Sobol sequences for sampling. The global solution range is [LB i , UB i ], and the i-th random number Sob i produced by the Sobol sequence [0,1], the position of the n-th sampling point is generated as follows:

As depicted in Figure 6, the distribution of 100 two-dimensional initialization points generated using the Monte Carlo method and the Sobol sequence method is shown. It is evident that the scatter points generated by the Sobol sequence exhibit a more uniform distribution, achieving wider coverage of the solution space while maintaining good sampling diversity. This, in turn, can enhance the optimization speed and convergence accuracy of the algorithm.
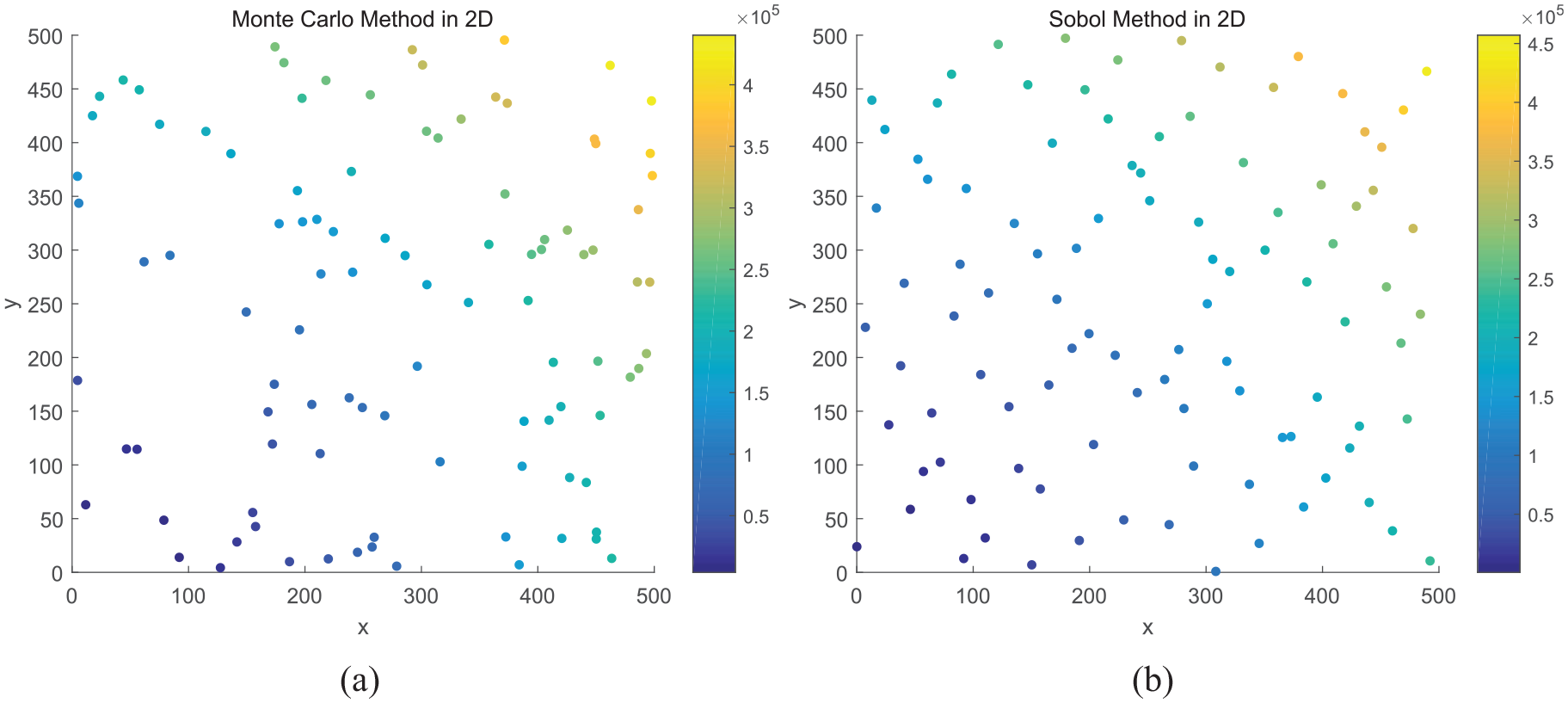
Two-dimensional distribution of initialization points. (a) Monte Carlo random scatter points. (b) Sobol sequence scatter points.
The elliptical constraint takes the start point (Xs, Ys) and the target point (Xe, Ye) as foci, with the midpoint of these two points serving as the origin (X0, Y0) of the ellipse. The constraint equation is as follows:

Where,
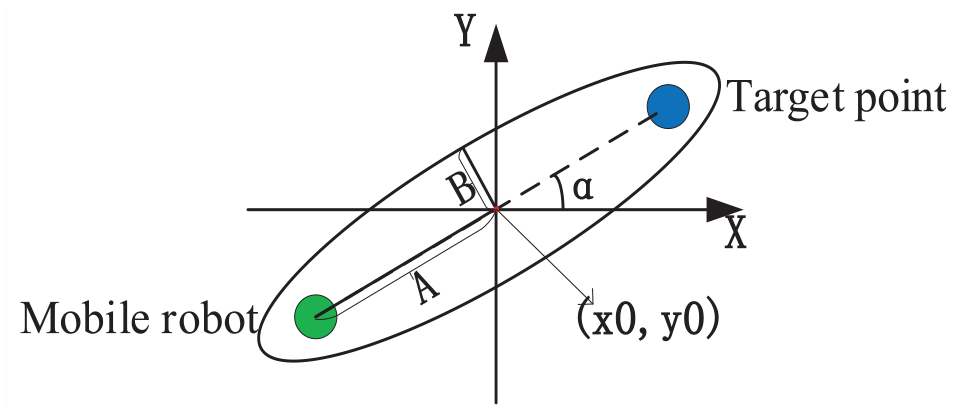
Schematic diagram of elliptical constraint.
Upon incorporating the elliptical constraint, under the premise of the same number of sampling points, the algorithm planning time was reduced from 7.2 s to 4.4 s. The planned paths before and after the improvement are shown in Figure 8.
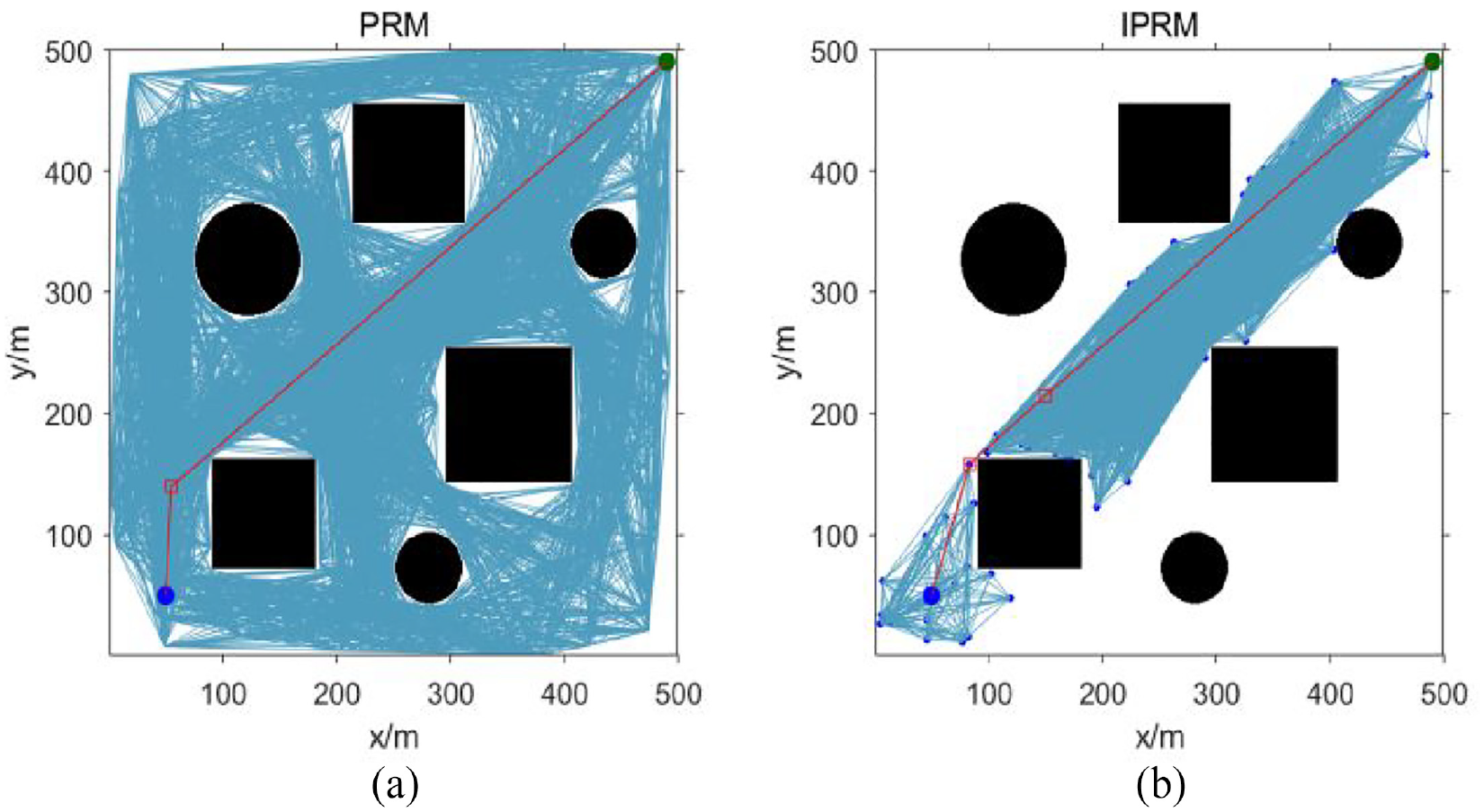
Comparison of PRM algorithm before and after improvement. (a) PRM. (b) IPRM.
Integration of algorithms
In response to the inherent flaws of the APF method, this paper proposes an algorithm that combines IPRM with IAPF. First, Sobol sampling is applied to IPRM, discarding points that do not meet the constraints, then connecting the sampling points and discarding lines that cross obstacles. Subsequently, the A* algorithm is employed to search for a path among the sampling points. If the search fails, the elliptical constraint’s short-axis coefficient and the number of sampling points are gradually increased until a feasible path is found. Finally, the IAPF method is used to sequentially track the path nodes from the IPRM. When encountering the issue of unreachable goals after traversing all virtual target points, the value p g is adjusted to bring the mobile robot into a strong attractive range, allowing it to continue with artificial potential field path planning. The specific flowchart is shown in the following Figure 9.
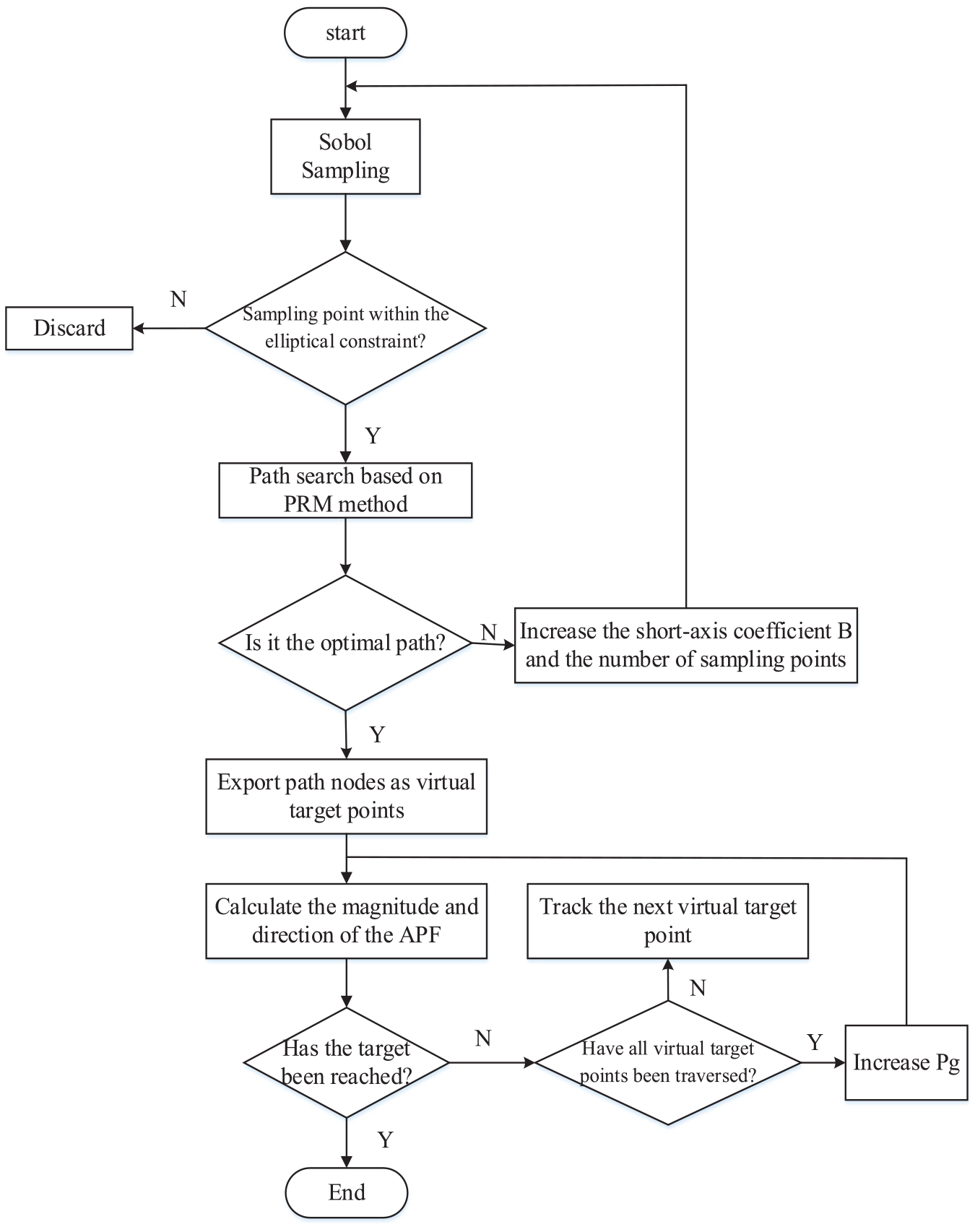
The flowchart of fusion algorithm.
Simulation analysis
For this study, simulation experiments were conducted utilizing the MATLAB environment to develop the simulation programs. These programs were designed to evaluate and compare the performance metrics of the APF, PRM-APF, PRM-IAPF, and IPRM-IAPF algorithms respectively.
The relevant simulation parameters are set as follows: the map range is set to 500 m × 500 m, with the starting point coordinates at (490, 490) (marked as the thick green dot in the figure) and the target point coordinates at (50, 50) (marked as the thick blue dot in the figure). The number of random sampling points for PRM is 200, and the number for IPRM is 100. The attraction gain coefficient is set as K att = 1/30, T att = 1/500, and the coefficient Q = −180. The repulsion gain coefficient is K req = 800. The initial coefficient for the short axis of the elliptical constraint is 50 m, and the initial value of p g is 50 m. The comparative simulation results for the four distinct algorithms are presented in Figure 10.
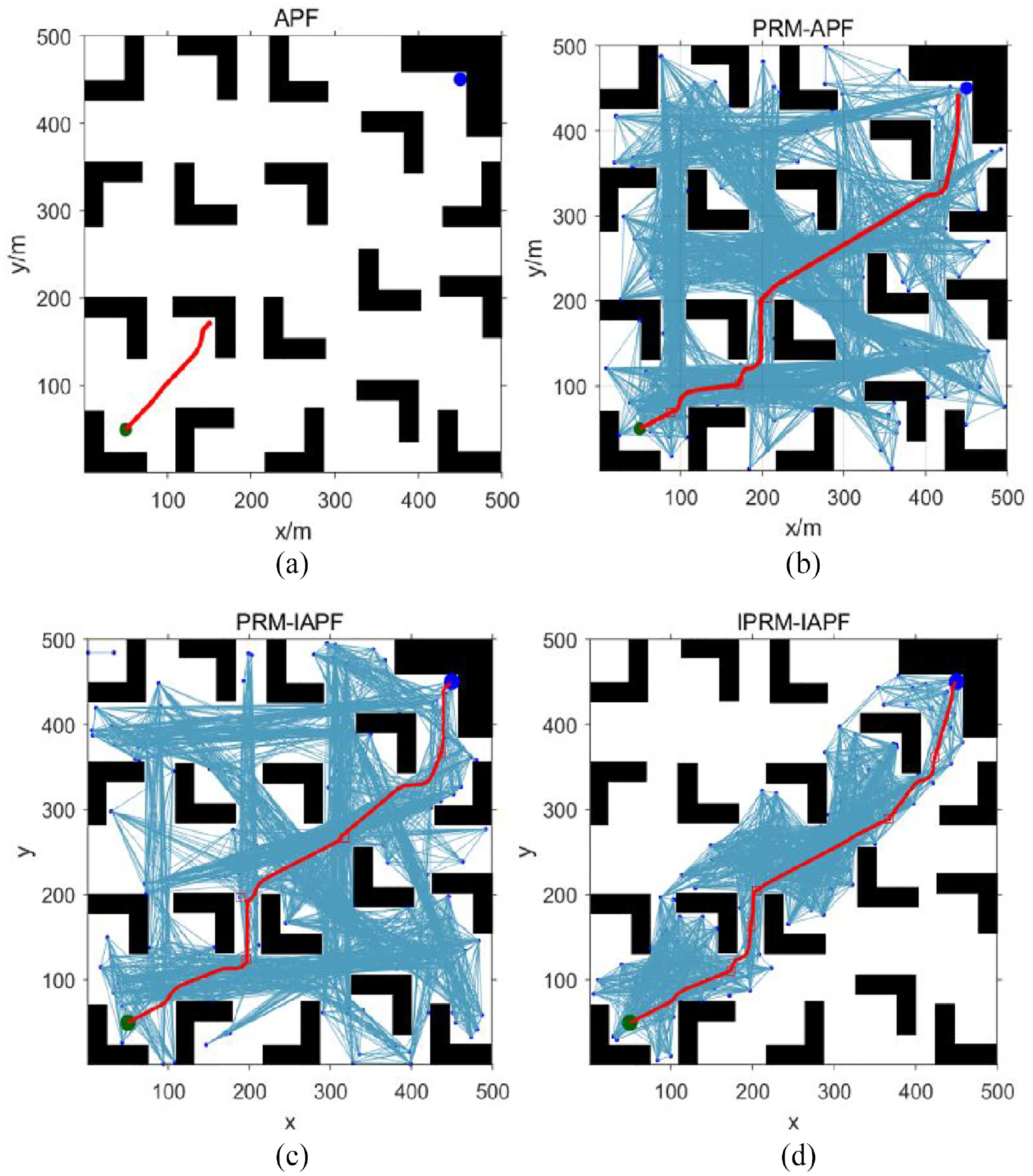
Comparison of path planning results for different algorithms. (a) APF. (b) PRM-APF. (c) PRM-IAPF. (d) IPRM-IAPF.
As depicted in Figure 10(a), the APF method lacks global environmental information, leading the mobile robot to fall into a local minimum trap. The nodes planned by the PRM algorithm are used as temporary target points for the APF method, as shown in Figure 10(b). Although the introduction of the PRM algorithm avoids the local minimum trap, it does not solve the issue of unreachable targets. Consequently, further improvements are made to the potential field function of the APF method, as depicted in Figure 10(c). The PRM-IAPF algorithm is able to reasonably address the inherent limitations of the APF method. However, However, the stochastic nature of the sampling points in the PRM algorithm results in the generation of numerous redundant nodes, thereby substantially augmenting the computational complexity of the algorithm. Therefore, as illustrated in Figure 10(d), the IPRM-IAPF algorithm proposes adding elliptical constraints to the sampling points of the PRM algorithm. It can be observed that the path planned by the IPRM-IAPF algorithm not only solves the inherent limitations of the APF method but also significantly reduces the number of redundant nodes. The generated path is also smoother compared to the PRM-IAPF algorithm.
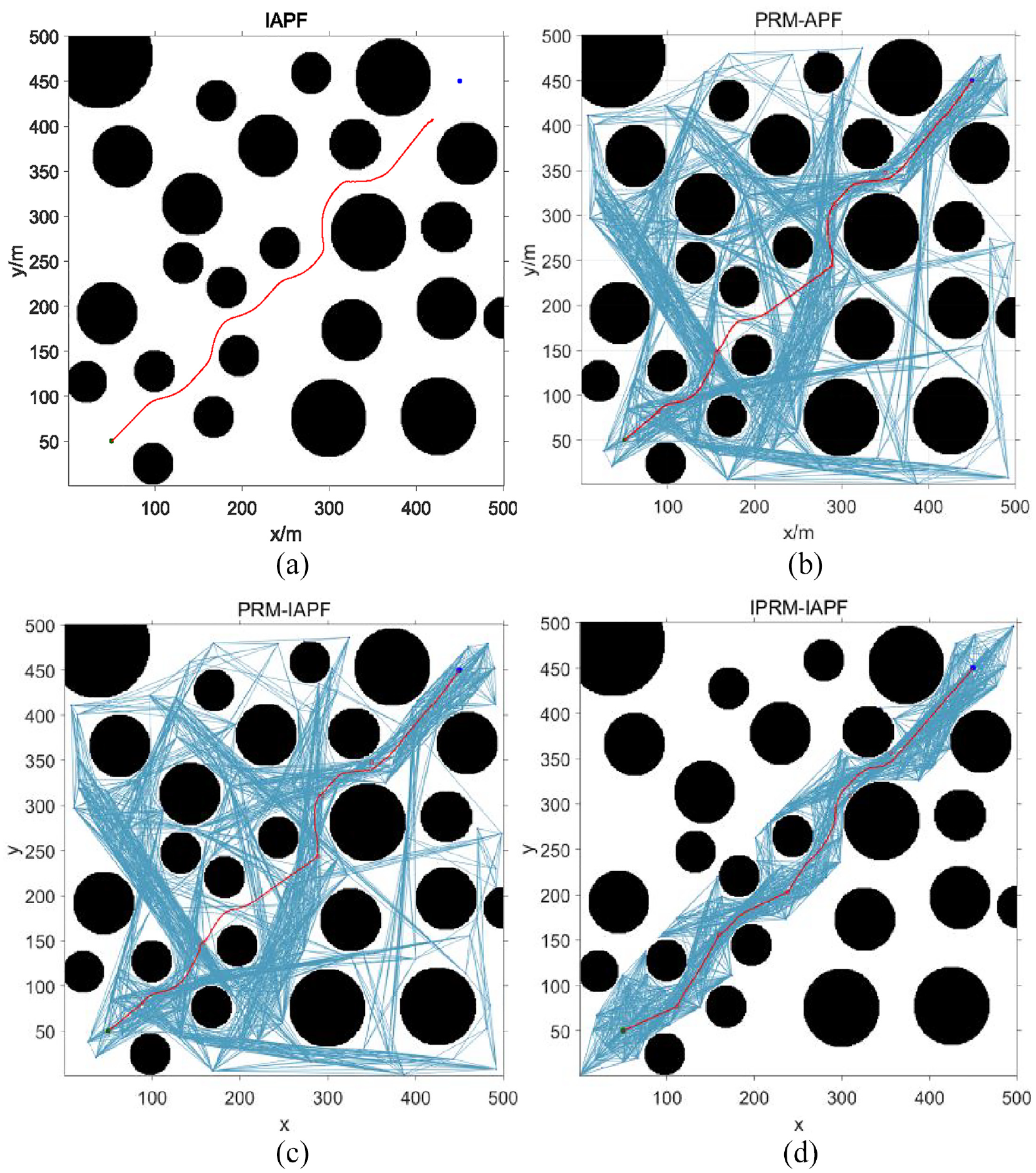
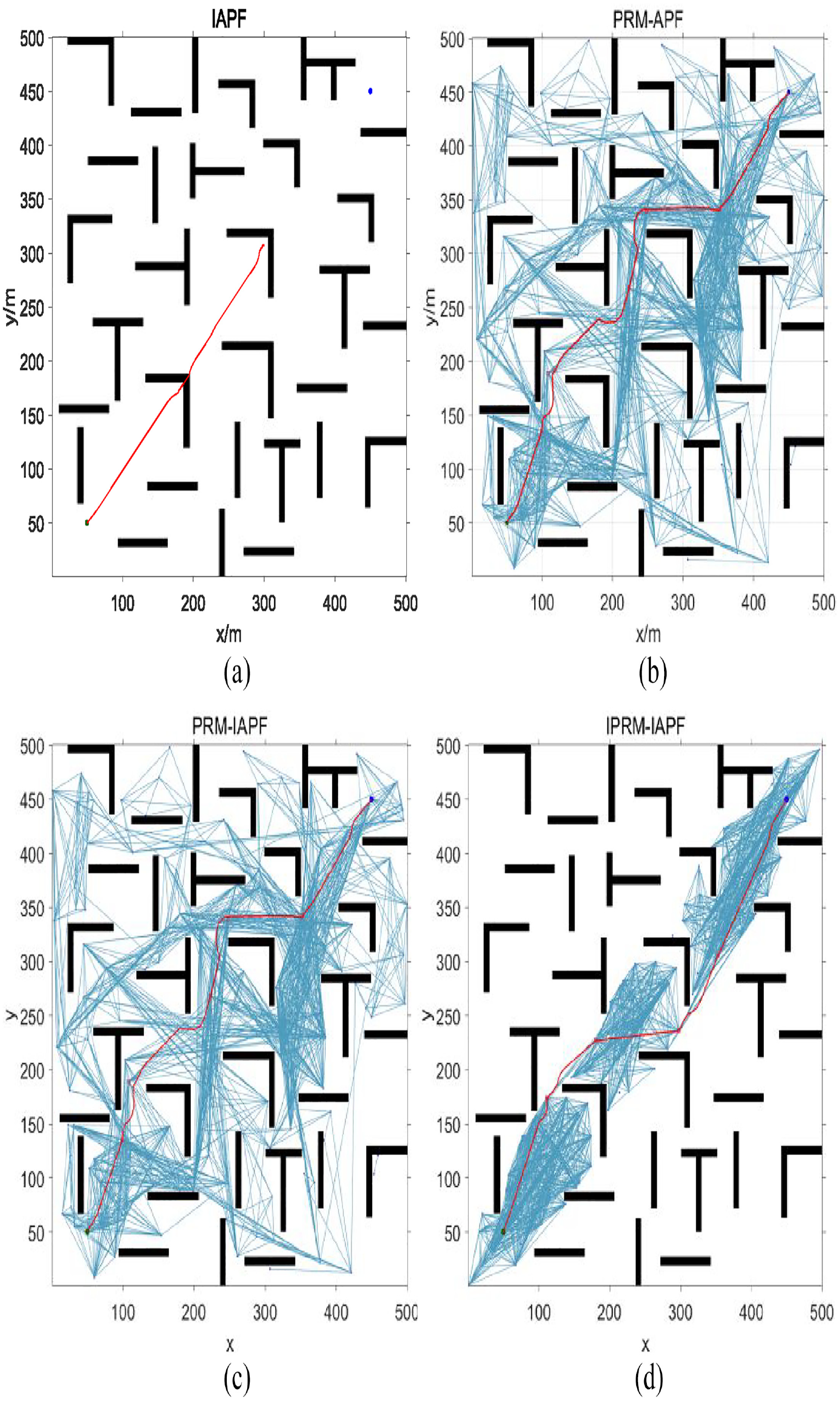
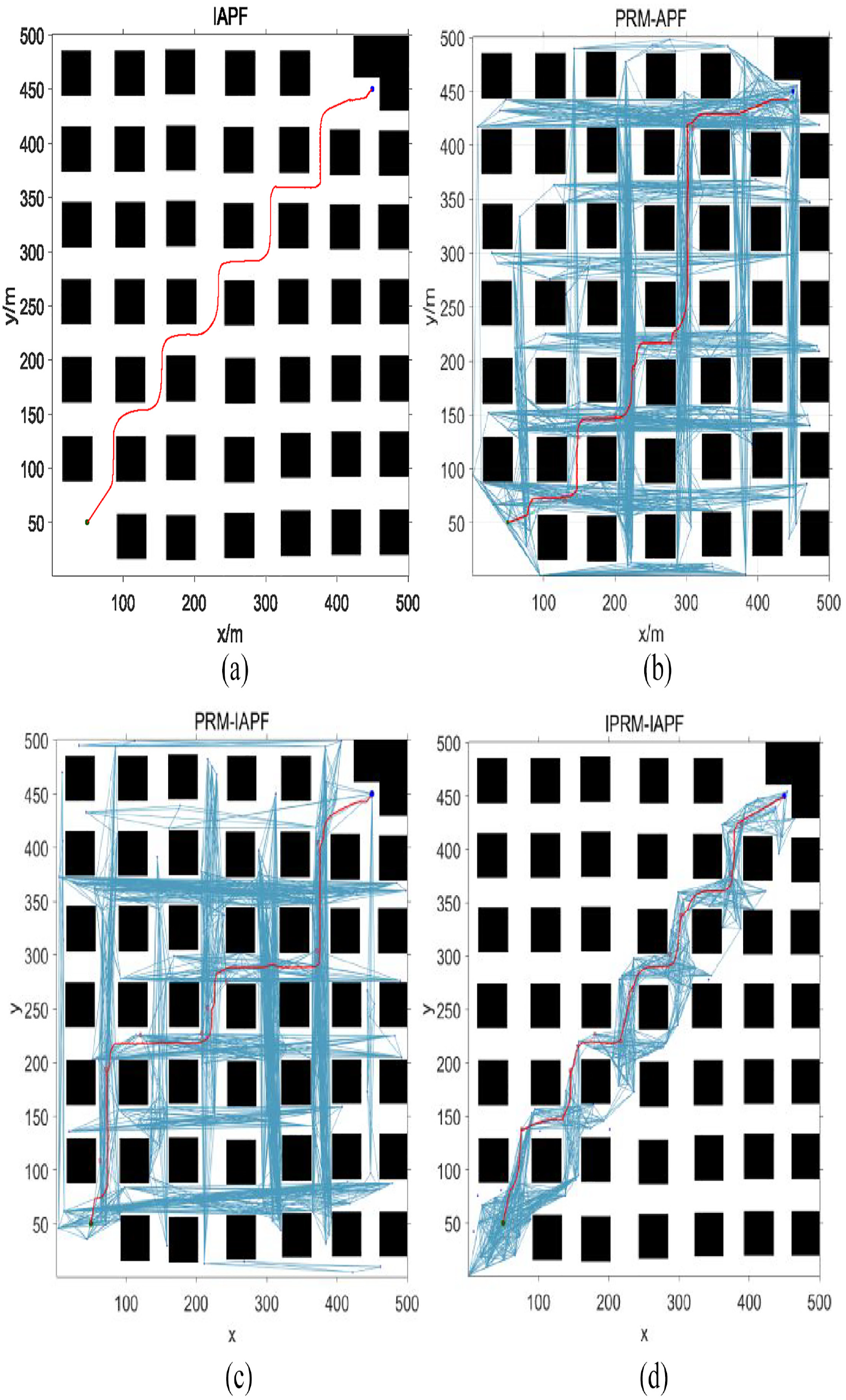
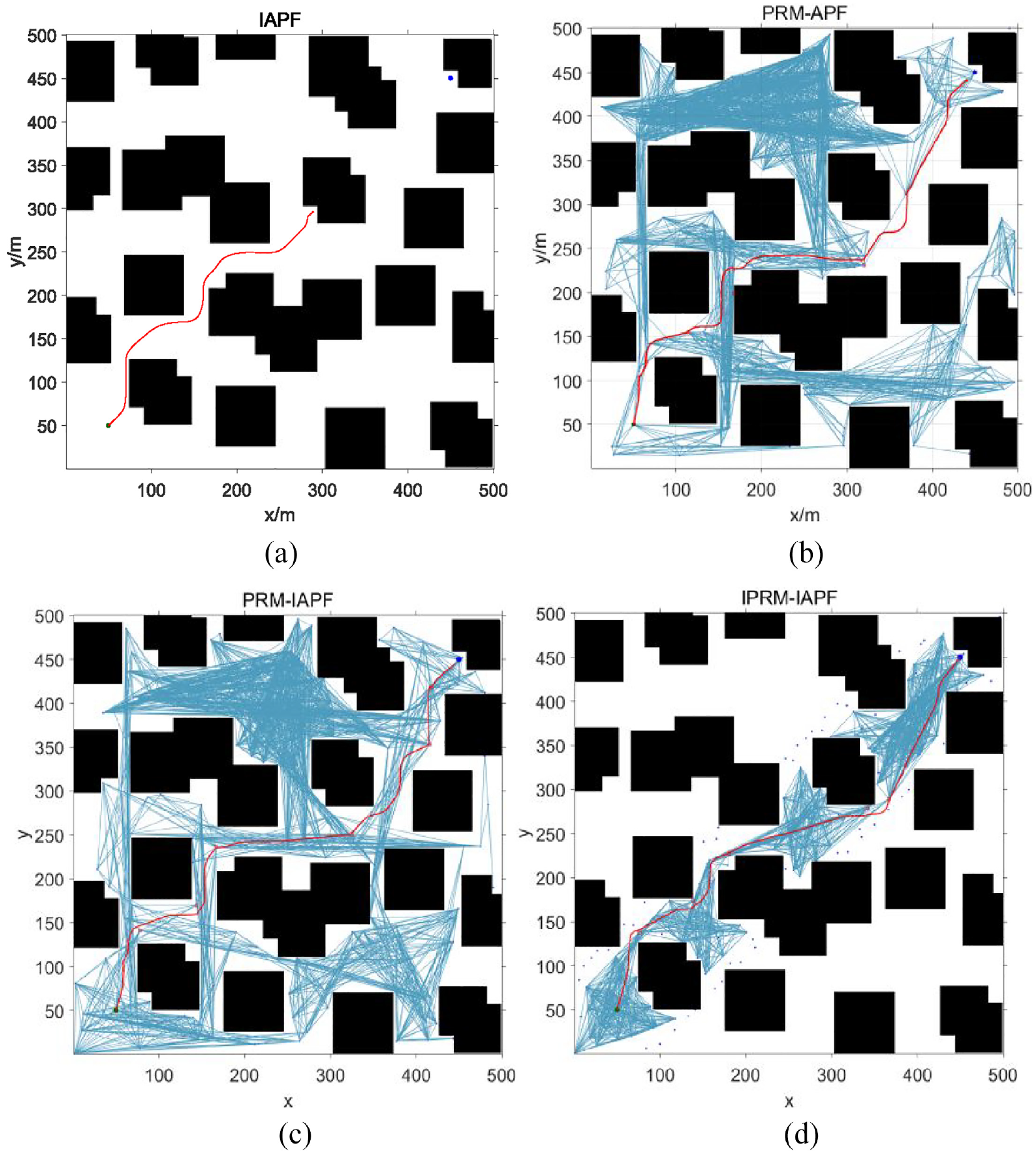
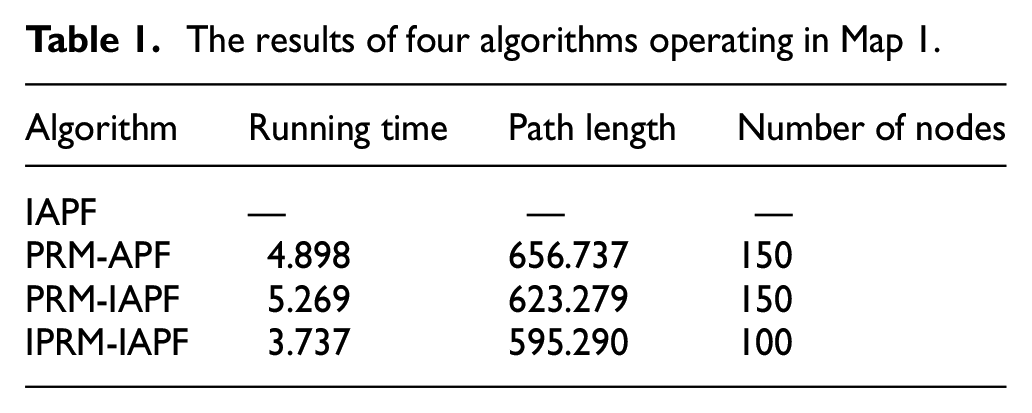
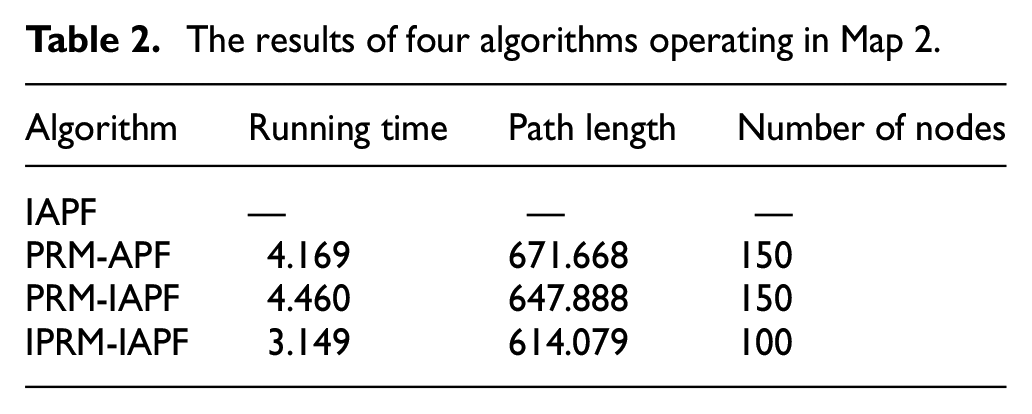
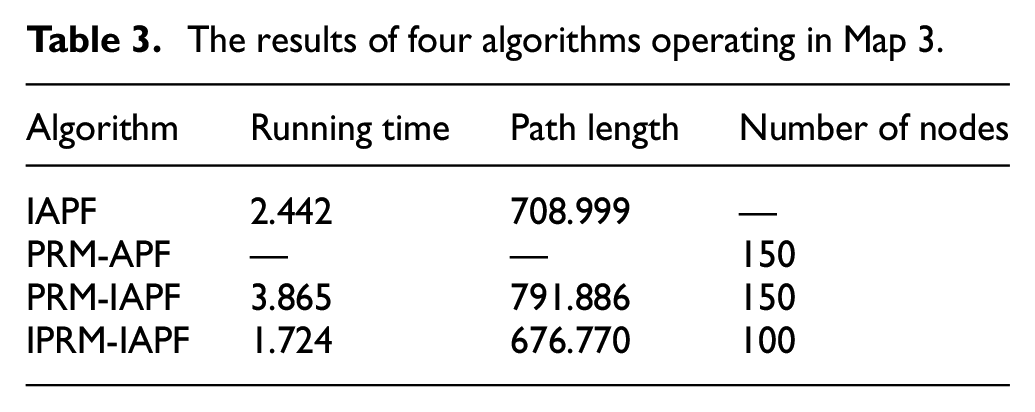
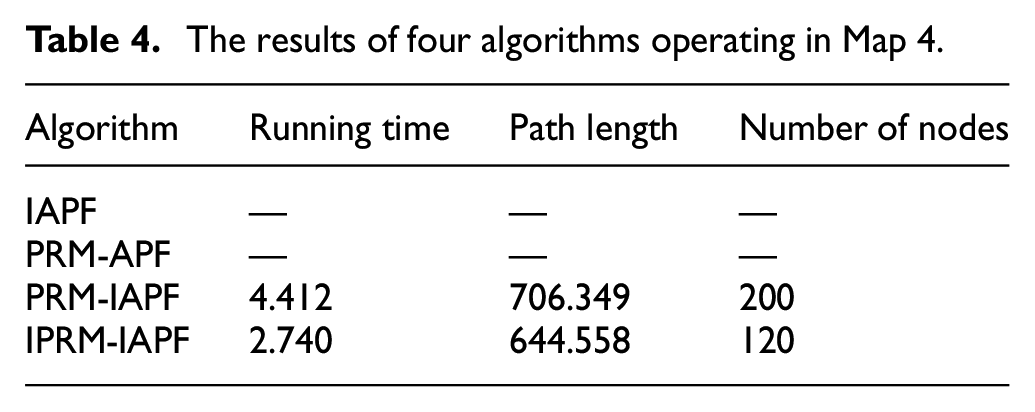
To further illustrate the superiority of the proposed algorithm, the APF, PRM-APF, PRM-IAPF, and IPRM-IAPF algorithms were simulated in four different map environments. The simulation results are shown in Figures 11–14, and the simulation experimental data are shown in Tables 1–4. The complexity of the four map environments escalates sequentially. Figure 11 is a simple obstacle avoidance environment. Figures 12 and 13 add local minimum and unreachable goal problems, respectively, while Figure 14 has both local minimum traps and unreachable goal situations. From Figure 11 and Table 1, it can be observed that in the simple obstacle avoidance environment, the IAPF algorithm stops near the goal point and fails to plan a path, while other algorithms can all plan paths. However, when considering computational time and space complexity, the IPRM-IAPF algorithm proposed in this paper offers more significant advantages. Figure 12 and Table 2 clearly indicate that the IAPF algorithm was the sole one unable to devise a path, succumbing to a local minimum. From Figure 13 and Table 3, it is clear that the PRM-APF failed to plan a path. The reason is that a single improvement to the APF method is not enough to make up for the inherent flaws of the APF method. Among the remaining three algorithms, the algorithm proposed in this paper is superior. Figure 14 and Table 4 show that in complex environments, only the PRM-IAPF and IPRM-IAPF algorithms were able to successfully plan paths, and the improved algorithm proposed in this paper reduced the planning time and the number of nodes by 37.89% and 40%, respectively, compared to the PRM-IAPF, and also reduced the path length by 61.79 m.
Simulation results under Map 1 environment. (a) IAPF. (b) PRM-APF. (c) PRM-IAPF. (d) IPRM-IAPF.
Simulation results under Map 2 environment. (a) IAPF. (b) PRM-APF. (c) PRM-IAPF. (d) IPRM-IAPF.
Simulation results under Map 3 environment. (a) IAPF. (b) PRM-APF. (c) PRM-IAPF. (d) IPRM-IAPF.
Simulation results under Map 4 environment. (a) IAPF. (b) PRM-APF. (c) PRM-IAPF. (d) IPRM-IAPF.
The results of four algorithms operating in Map 1.
The results of four algorithms operating in Map 2.
The results of four algorithms operating in Map 3.
The results of four algorithms operating in Map 4.
In summary, the IAPF algorithm and the PRM-APF algorithm are unable to plan paths in complex environments, while the PRM-IAPF, although able to plan paths smoothly, still falls short in terms of path planning time and length. The IPRM-IAPF algorithm proposed in this paper has the shortest path planning length, the least running time, and is the most reliable among the four.
Physical experiments
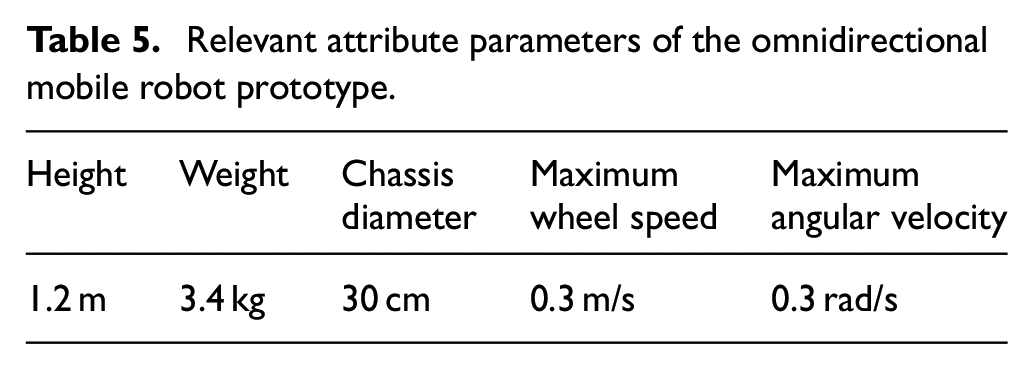
The mobile robot utilized in this study is designed for disinfection applications in public spaces. The prototype of the omnidirectional mobile robot is shown in Figure 15. The overall structure is cylindrical, with a three-wheel omnidirectional chassis at the bottom. The STM32F103C8T6 core board acts as the lower control unit, powering the three omnidirectional wheels. Considering the weight of the disinfection water tank, it is placed above the chassis to lower the center of gravity of the robot. The industrial computer serves as the upper machine, along with the battery pack, placed above the disinfection water tank, above that are the diaphragm pump, display screen, and disinfection spray nozzle. The relevant parameters are shown in Table 5.
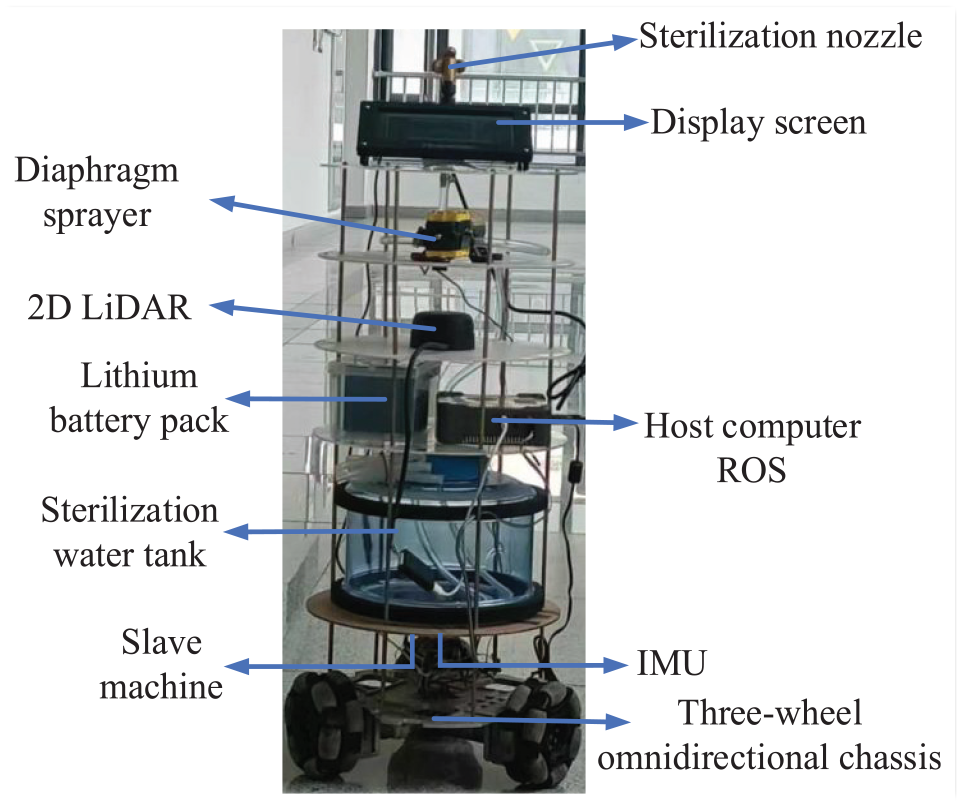
Prototype of an omnidirectional mobile robot.
Relevant attribute parameters of the omnidirectional mobile robot prototype.
Omnidirectional mobile robot functional testing
The omnidirectional mobile robot is equipped with a 2D laser radar and an Inertial Measurement Unit (IMU) from Slamtec, which are utilized to construct a map of the experimental building on campus using the Cartographer mapping algorithm. The mapping effect is shown in Figure 16(a), where the gray areas represent unexplored regions, white areas represent free space, and black areas represent obstacles. Figure 16(b) shows the inflated map, with the dark gray area forming a buffer zone around the original obstacles (black areas). This buffer zone is intended to ensure that the omnidirectional mobile robot can safely avoid obstacles during navigation, preventing collisions. The inflation coefficient is set to be consistent with the diameter of the omnidirectional mobile robot.
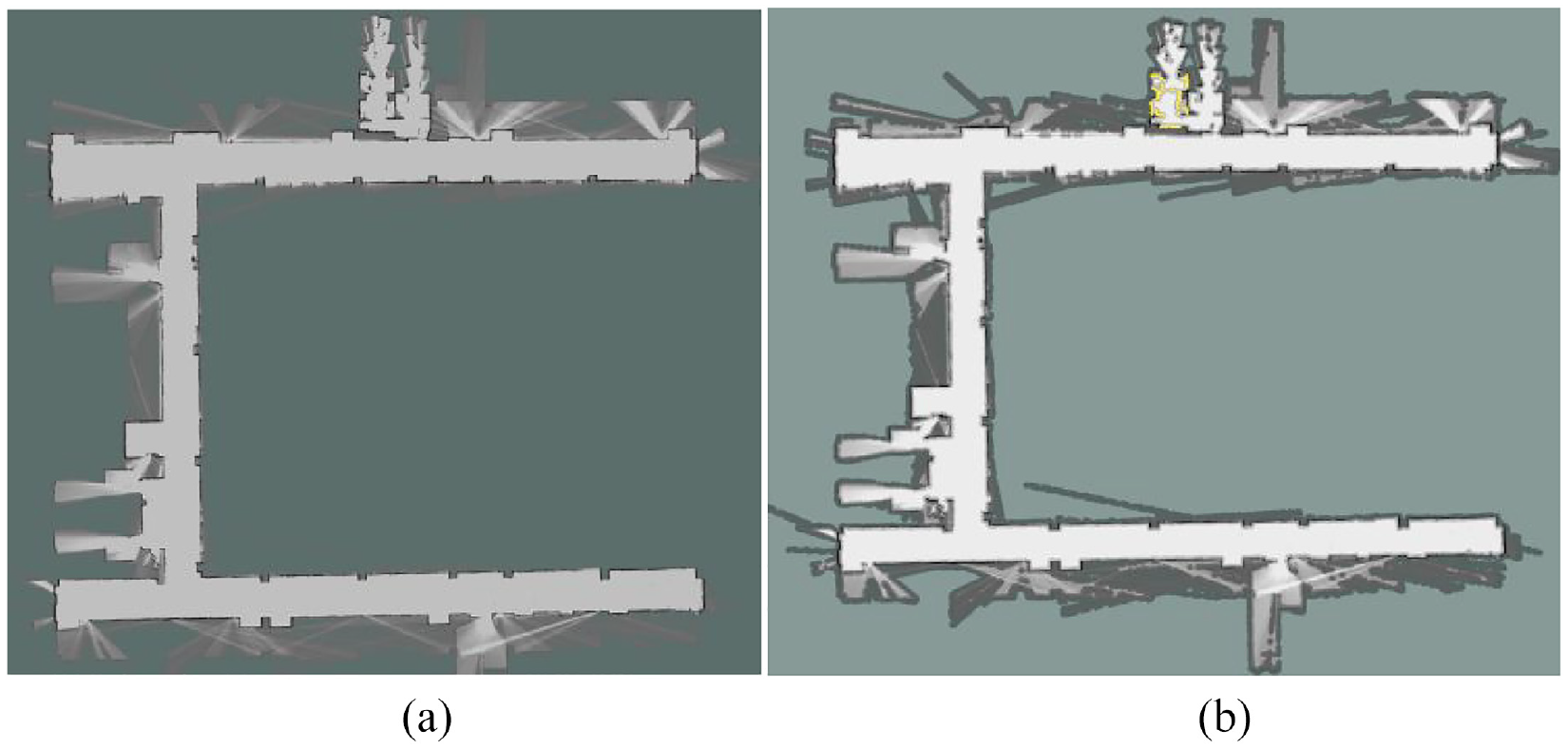
Functional test diagram. (a) Mapping function. (b) Dilated Layer Map.
Path planning experiments
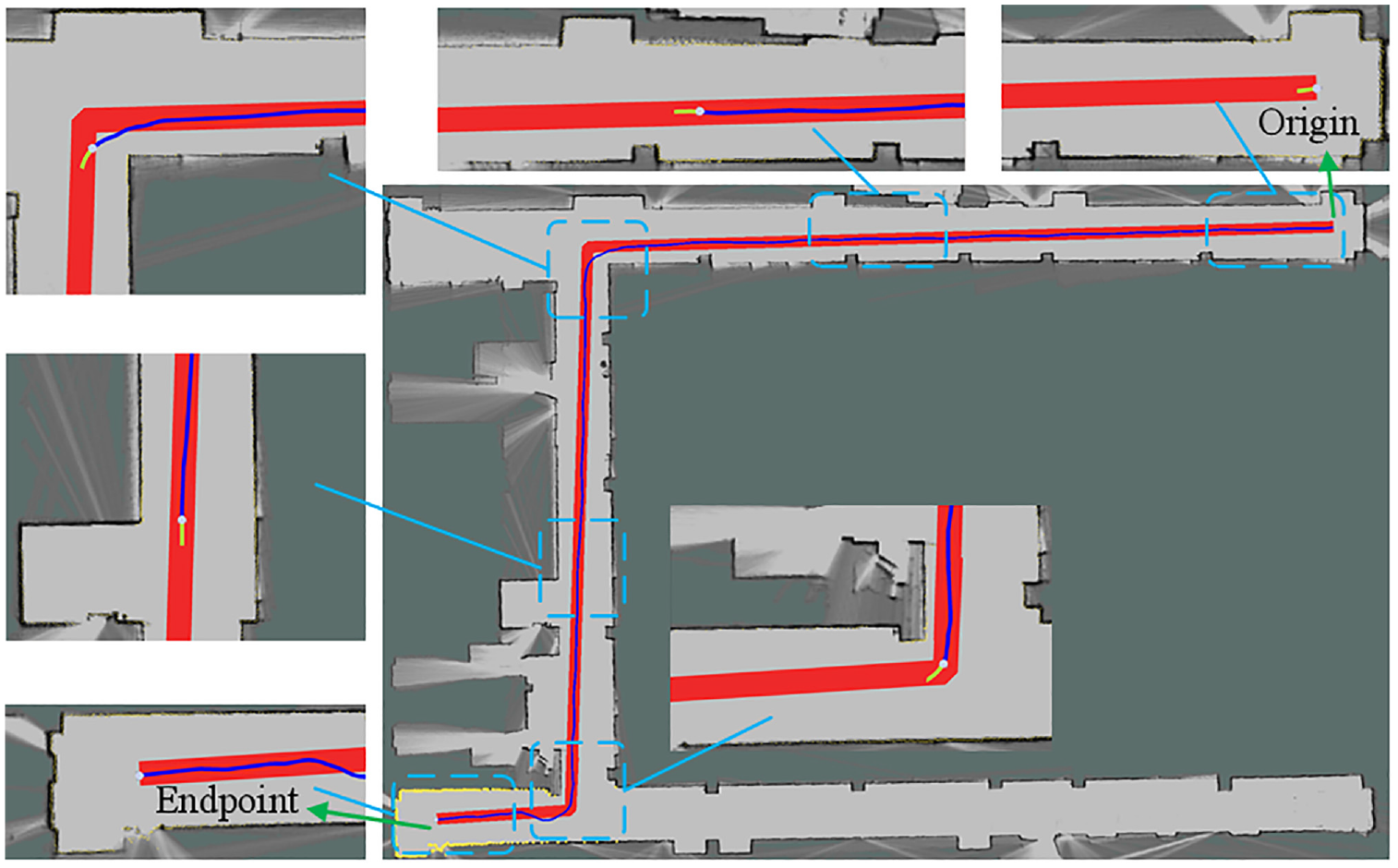
The physical path planning experiments are based on the map built in Figure 16 as the known map, and obstacles are set as unknowns to verify the obstacle avoidance effect. Based on the presence or absence of obstacles, two types of experiments were designed, with three groups each. In the path diagrams, the red line represents the global path planned by the IPRM algorithm, the yellow dashed line represents the local path planned by the IAPF algorithm, the blue line represents the actual path traveled by the robot, and the yellow dots represent the radar laser points.
Experiments with no obstacles
Corridor path planning experiment 1 (straight path): As shown in Figure 17, the path planning algorithm can autonomously navigate in the corridor, allowing the omnidirectional mobile robot to move along the planned path. The resulting path exhibits a straight trajectory with minimal tracking errors, and the local path planning trajectory is relatively smooth. This demonstrates that the path planning algorithm can effectively and stably plan straight paths in an unobstructed environment.
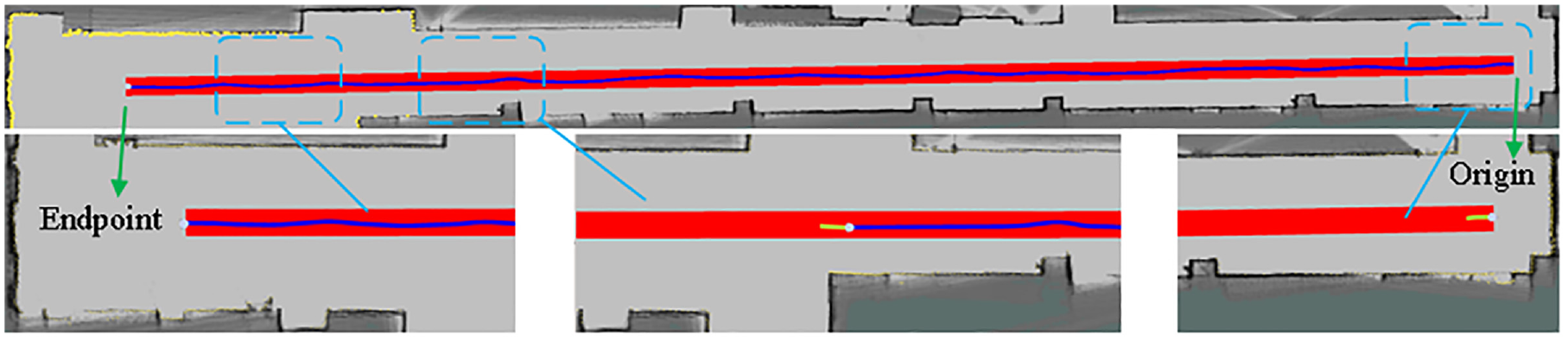
Path planning experiment 1.
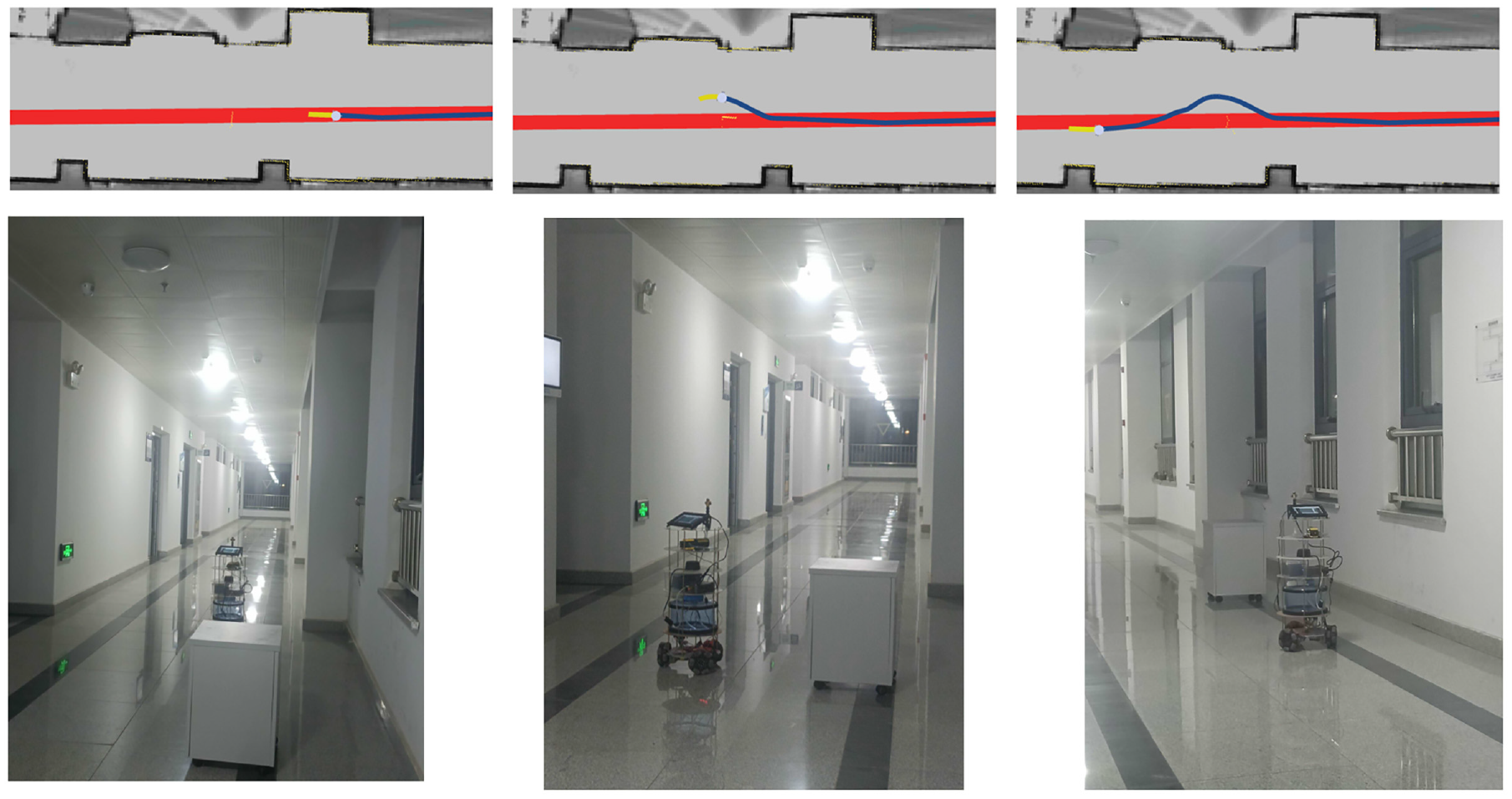
Corridor path planning experiment 2: As depicted in Figure 18, the path planning algorithm successfully plans a global path, enabling the omnidirectional robot to perform local planning according to the specified trajectory. The path planning result shows a smooth trajectory with small tracking errors.
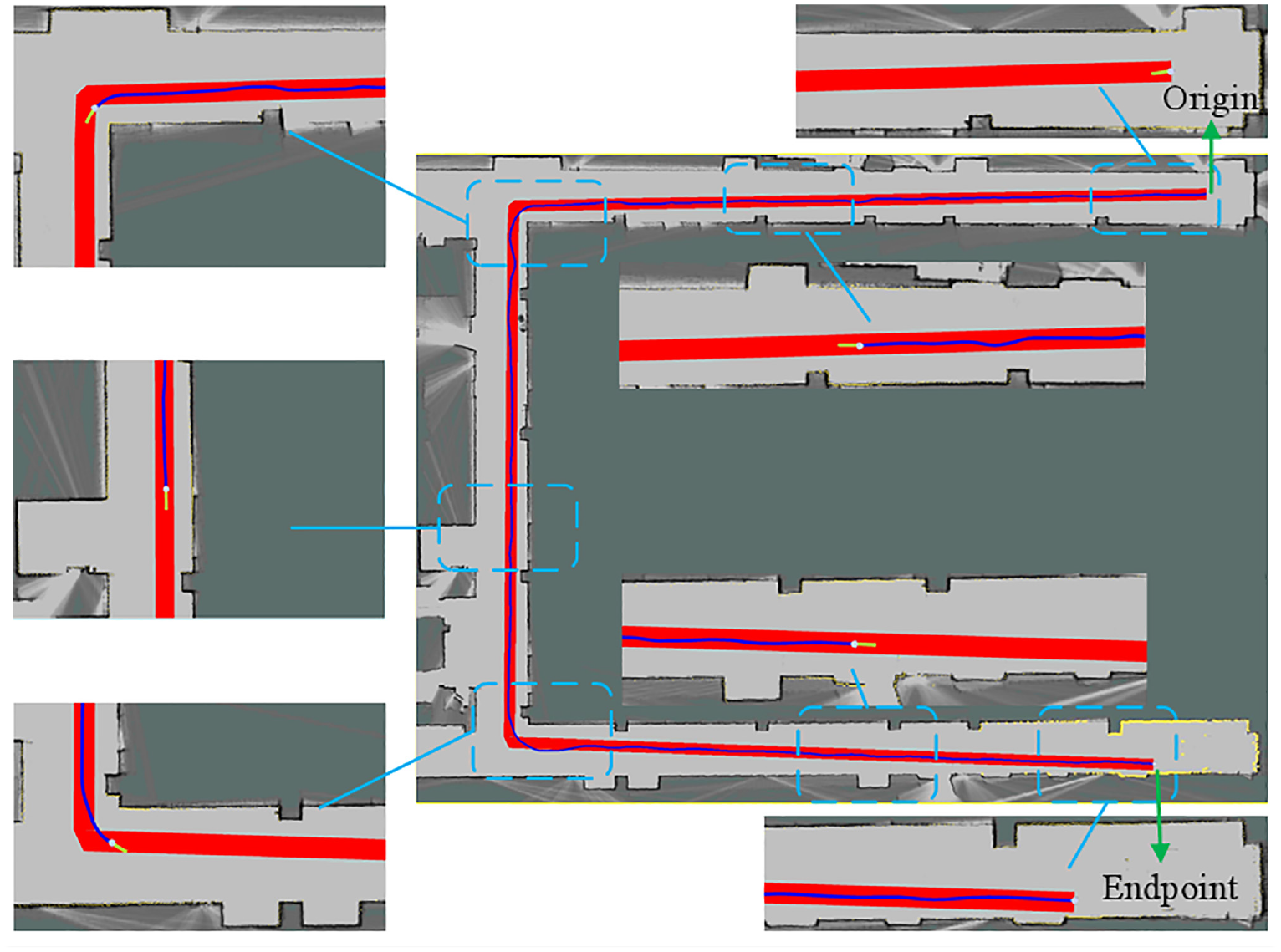
Path planning experiment 2.
Corridor path planning experiment 3: As shown in Figure 19, the path planning algorithm is able to successfully plan a global path, enabling the omnidirectional robot to accurately track the globally planned trajectory for local planning. The local path tracking error is minimal.
Path planning experiment 3.
In the aforementioned three path planning experiments, the omnidirectional mobile robot was able to follow the planned paths, maintaining a safe distance from the walls while traveling and smoothly navigating to the target point. The path planning results basically met the expected outcomes.
Obstacle avoidance experiments
Single obstacle path planning experiment: In this experiment, an obstacle was placed on the planned path, As shown in Figure 20. The local planner was able to successfully plan a path around the obstacle, allowing the omnidirectional mobile robot to avoid the obstacle and proceed along the global planned trajectory. This indicates that the path planning algorithm has good obstacle avoidance capability.
Obstacle avoidance experiment 1.
Corner obstacle path planning experiment: An obstacle is placed at the corner of the global path, and the local planning can successfully plan a path to avoid the obstacle, allowing the robot to make a smooth turn at the corner, as shown in Figure 21. After avoiding the obstacle, the omnidirectional mobile robot can return to the global path and continue tracking. This indicates that the path planning algorithm can handle path planning tasks in complex scenarios.
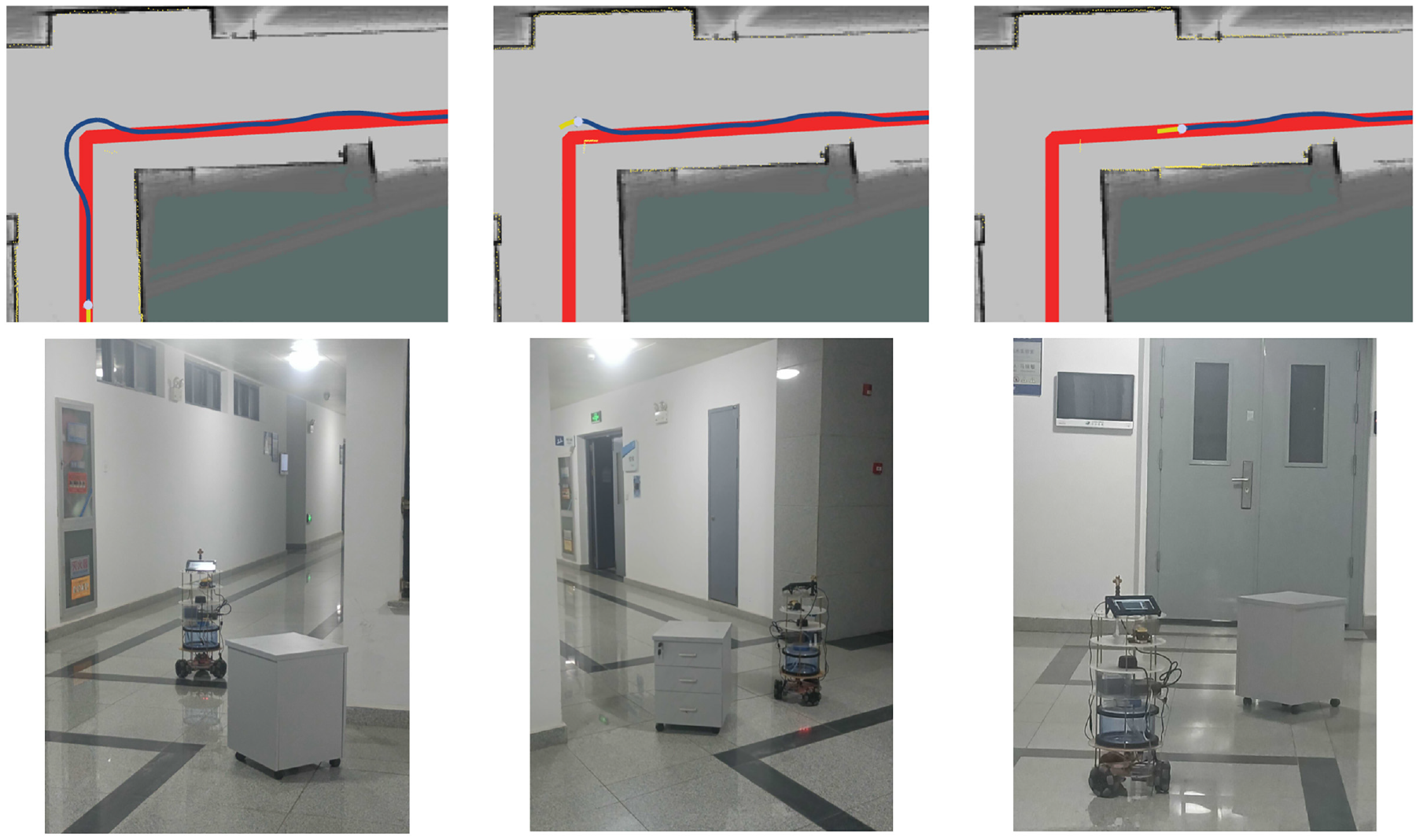
Obstacle avoidance experiment 2.
Double obstacle path planning experiment: As can be seen in Figure 22, the path planning algorithm was able to adapt to the double obstacle scenario. The omnidirectional mobile robot continuously avoided the obstacles and progressed steadily along the planned path. This demonstrates that the path planning algorithm possesses good capabilities for dealing with multiple obstacles.
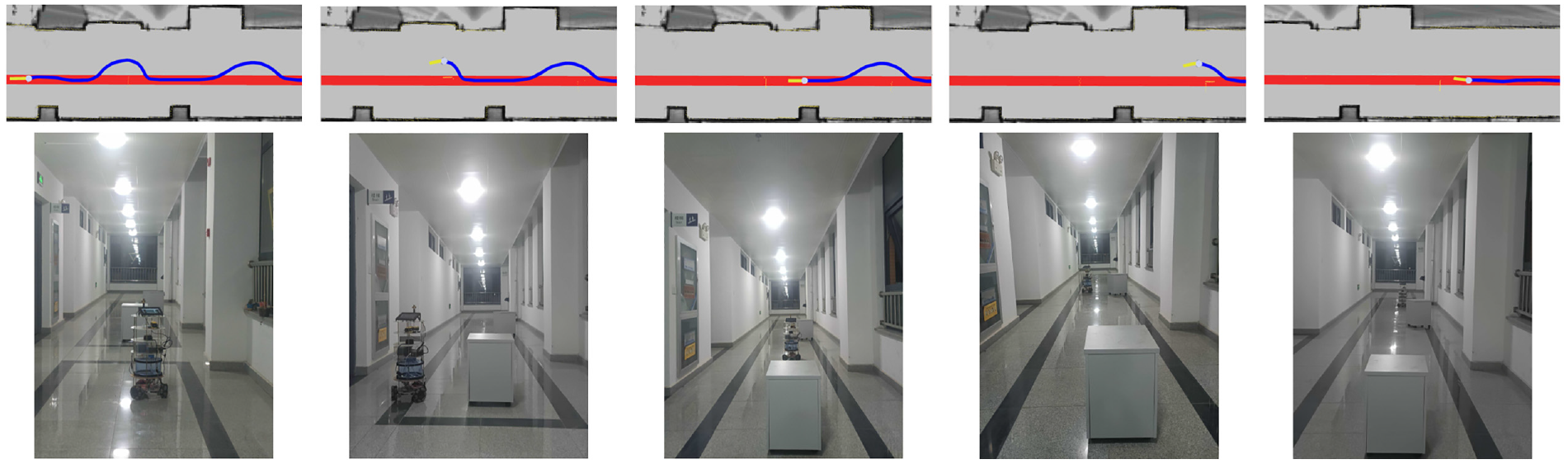
Obstacle avoidance experiment 3.
In all three obstacle avoidance experiments, the omnidirectional mobile robot successfully completed the tasks of avoiding a single obstacle, continuously avoiding multiple obstacles, and avoiding obstacles at corners.
Conclusion
The core contribution of this paper is the development of an innovative path planning algorithm, IPRM-IAPF, which integrates the global planning advantages of the PRM and the local navigation capabilities of the APF, significantly enhancing the path planning performance of mobile robots in complex environments. A series of simulation experiments have verified the superiority of the IPRM-IAPF algorithm in map environments of varying complexities. Compared with existing technologies, compared with IAPF, PRM-APF, and PRM-IAPF algorithms, the planning time, node count, and path length have all been significantly reduced. These results fully demonstrate the advantages of the IPRM-IAPF algorithm in terms of efficiency, accuracy, and reliability.
In addition, physical experiments have further confirmed the effectiveness of the algorithm in practical applications. Whether in a no-obstacle environment or in a scenario with multiple obstacles, the developed omnidirectional mobile robot can successfully complete path planning and obstacle avoidance tasks.
In summary, the IPRM-IAPF algorithm proposed in this study provides an efficient and highly successful solution for the field of mobile robot path planning, with important theoretical significance and broad application prospects. Looking ahead, future endeavors will delve into the application of the algorithm across an even broader spectrum of environments, with a relentless pursuit of performance optimization to cater to the nuanced requirements of various scenarios.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
The datasets generated and analyzed during the current study are not publicly available due the data also forms part of an ongoing study but are available from the corresponding authors on reasonable request.