
Abstract
Exploring a novel adaptive asymmetric sliding mode control methodology with time-varying state constraints (TVSCs), we address trajectory tracking issues in uncertain nonlinear systems. The asymmetric barrier Lyapunov functions (ABLFs) and neural networks is employed within each subsystem’s virtual control design process using back-stepping control (BSC) method. This ensures the imposition of TVSCs and effectively addresses challenges posed by system uncertainties. Additionally, to enhance the convergence of tracking deviations within small zero neighborhoods, a nonsingular integral terminal sliding mode control (NITSMC) method is incorporated into the actual control algorithm design. This method illustrates that, the system states consistently stay within the specified boundaries, tracking errors rapidly converge to a confined range. All signals within the system remain bounded. Simulation findings affirm the efficacy of the suggested control strategy.
Keywords
Introduction
Background and motivation
In recent years, the rapid advancement of adaptive control theory, particularly through the utilization of fuzzy-logic system (FLS) and neural networks system (NNS), has led to the exploration of various control methodologies aimed at addressing numerous control challenges. Remarkable progress has been made in this domain.1–4 FLS and NNS are widely recognized for their effectiveness in approximating uncertainty, while the back-stepping control (BSC) method is renowned for its efficacy in managing cascaded nonlinear systems. Consequently, the integration of adaptive BSC methods is becoming prominent topic in addressing tracking control problems in unknown nonlinear systems.5–8
It is universally acknowledged that practical systems often encounter diverse nonlinear uncertainties and operational constraints. Consequently, the control theory community has increasingly concentrated on addressing the challenge of controlling nonlinear systems with state constraints. Referring from authors’ knowledge and as evidenced by existing literature, various types of barrier Lyapunov functions (BLFs), comprising log-type BLFs, tangent-type BLFs, and integral BLFs, along with barrier function-based approaches 9 have been extensively utilized to address output or state constraints.10–13 An adaptive neural network (ANN) BSC controller was constructed to stabilize nonlinear strict-feedback systems (NSFS) with uncertain dynamics and complete state constraints in a research by Liu et al. 14 In the research by He et al., 15 a control strategy was introduced with the objective of stabilizing uncertain time-delayed systems with time-varying full-state constraints (FSCs). Authors of a research in 2020 16 presented ANN control techniques employing ABLFs based on finite-time for a specific class of NSFS with time-varying FSCs. Furthermore, the ABLFs methodology has demonstrated successful application in real-world engineering scenarios, including control of robot manipulator constraints and permanent magnet synchronous motor systems.17–20
While significant progress has been made in the research on state constraints control schemes as evidenced by the aforementioned papers, it is noteworthy that they do not explicitly address tracking dynamic performance metrics such as tracking convergence rate and robustness performance. Drawing from the foundation of adaptive state constraints control theory, recent research has delved into the concepts of finite-time control and robust control methodologies, including sliding mode control (SMC) 21 and finite time control 22 approaches. SMC is renowned for its resilience against external disturbances and unmodeled system dynamics. To address this challenge, this study proposes the utilization of the NITSMC method, which integrates ABLs to formulate the controller. 23 Deepika et al. 24 introduced an integral terminal SMC strategy along with UDE to track outputs in constrained settings for mismatched uncertain nonlinear systems, albeit limited to constant constraints. Li 25 adopted an adaptive SMC technique leveraging neural networks and BLFs to ensure compliance with time-varying constraints for manipulator outputs, albeit without consideration for other state constraints. Meanwhile, finite-time control schemes with state constraints have emerged as a focal point within this research domain.26–33
While significant progress has been made in addressing unknown nonlinear systems with constraints, it is noteworthy that, in broader context of such systems, certain drawbacks persist within existing control schemes. These limitations include the substantial computational load associated with RBF-NNs, “explosion of complexity” issue in BSC techniques, and the intricacies involved in implementing dynamic surface control (DSC) strategies, among others. Motivated by these observations, it becomes apparent that there is a paucity of research focusing on adaptive finite-time convergence nonsingular SMC with asymmetric TVSCs, representing a more universal and complex scenario.
Contributions of the paper
Motivated by the insights gained from the aforementioned observations, this paper delves into the exploration of an ANN-based NITSMC approach tailored for a subset of unknown nonlinear systems featuring TVSCs. Through this endeavor, the controller design pertaining to the TVSCs is rendered more practical, while concurrently mitigating the stringency of constraint limitations by integrating asymmetric time-varying BLFs. 17
Primary contributions are summarized as below.
(1) Unlike barrier functions SMC method used to address output control problems as demonstrated in the research by Deepika et al. 24 and symmetric SMC BLFs method, 26 which are primarily effective for managing static constraints, this paper diverges by leveraging asymmetric constraints and neural networks to tackle the complexities inherent in nonlinear systems.
(2) Special unknown functions for each subsystem are constructed, approximated through adaptive RBF-NNs. Neural networks are incorporated into the controller design to mitigate computational burdens and circumvent the complexities associated with the “explosion of complexity” in the BSC procedure, in contrast to existing works.13,20,34
(3) To expedite the convergence of trajectory tracking in asymmetric TVSCs, the research introduces a finite-time NITSMC strategy in the final subsystem to formulate the actual control algorithm, distinguishing itself from prior research efforts.
Structure of the paper
Rest research is structured as: Sectio Section 3 details control algorithms design utilizing adaptive BSC-ABLFs and NITSMC theory, followed by the presentation of a control theorem for uncertain nonlinear systems. As for Section 4, numerical example was presented to validate suggested controller’s efficacy. Lastly, Section 5 provides the conclusion with a summary of findings and discussions on future directions.
System description and preliminaries
System overview and problem formulation
Take into account the subsequent strict-feedback nonlinear system featuring TVSCs:
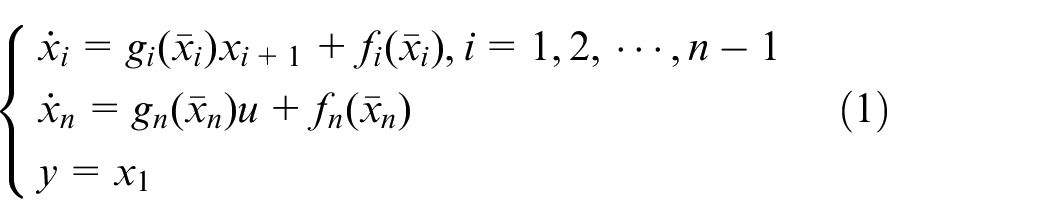
given that
Study aim is designing adaptive NITSMC neural network control for nonlinear system (1) with TVSCs, so as to achieve the following goals:
(1)
(2) System states
(3) Closed loop signals’ boundedness is guaranteed in finite time meaning.
Before proceeding with design process for aforementioned control objects, it is essential to clarify following assumptions and preliminaries.

where
Preliminaries
RBF-NNs prove highly effective in addressing system uncertainties within the nonlinear control domain due to their adeptness in approximating uncertainties. In this investigation, RBF-NNs are devised, comprising two-layer networks. Herein, hidden layer functions as a predetermined nonlinear transformation devoid of adjustable parameters, while output layer linearly delivers outputs within subsequent space utilizing self-adjusting weight vectors. Consequently, RBF-NNs were employed to assess the unfamiliar functions
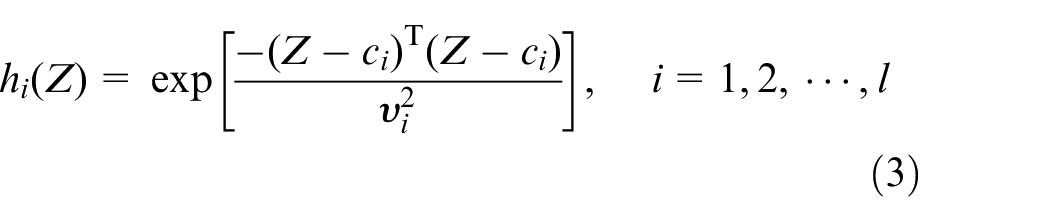
given that


where

In order to alleviate the significant computational burden associated with RBF-NN weight vectors online estimation,

where


Adaptive NITSMC state constraints controller design
States coordinate transformation
Before proceeding with the detailed design procedure, we perform a coordinate transformation of the system states. To enhance simplicity and facilitate clarity in description, system time variations were disregarded throughout the research without introducing ambiguity. Following state coordinate transformation is implemented as

where
Controller design process
To address TVSCs, accelerate system convergence rates, and improve control robustness, a novel NITSMC strategy is devised, integrating the BSC methodology using asymmetric time-varying BLFs. To elucidate the design philosophy and strategy, and to comprehend the overall design concept, the control structure of the composite control strategy is depicted in Figure 1. The design process for the control algorithms will be delineated in several steps, which will be deduced incrementally.

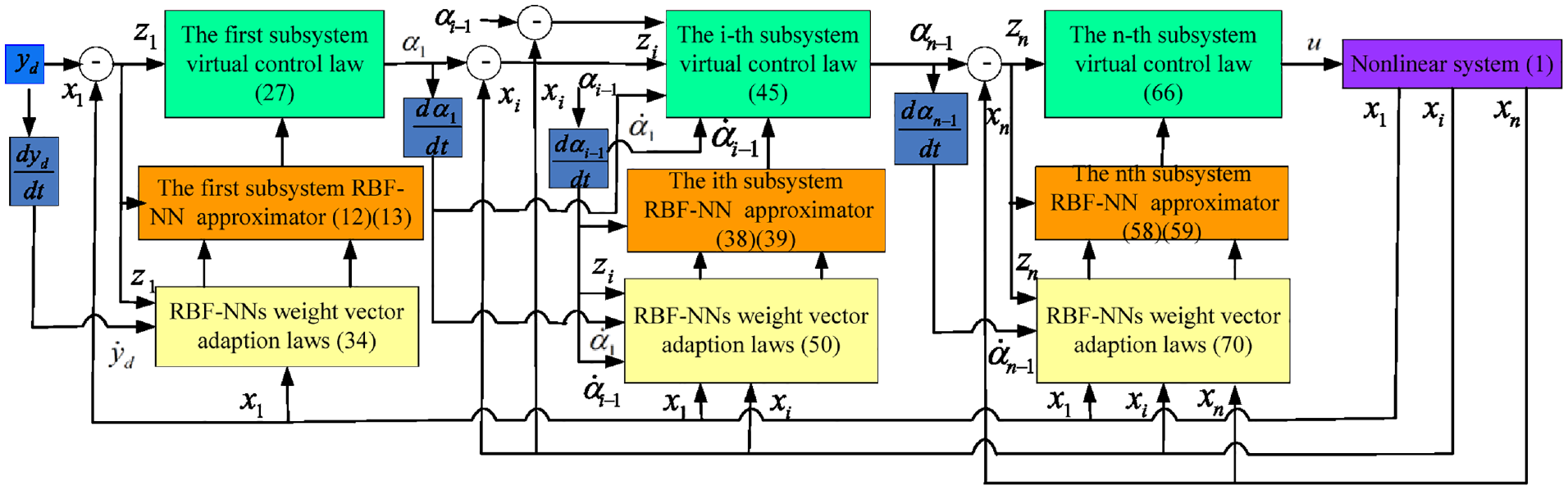
Control schematic diagram.
In convention BSC technique, one can design VCL for the first subsystem using signal with

Given that

where
Thus, based on (10) and (13), equation (11) is changed as

Because of the output state constraints is asymmetric time-varying, thus, we design the
where p(positive integer) satisfied

Based on Assumption 2, positive constants


For the simplicity of the formula and expression convenience, following states tracing error coordinate transformation is made as


Furthermore, first derivative of
Using (14), (21) gets
To simplify the formation of (22), we define
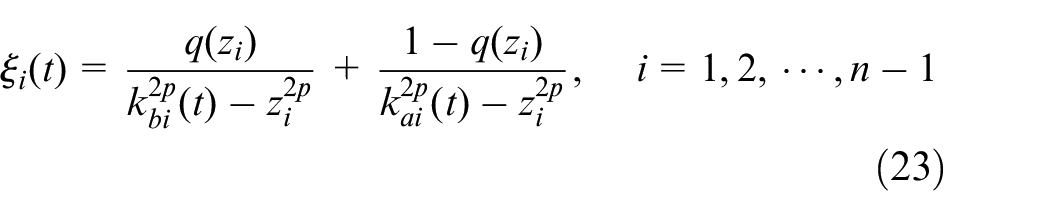
Then, (23) can be simplified as
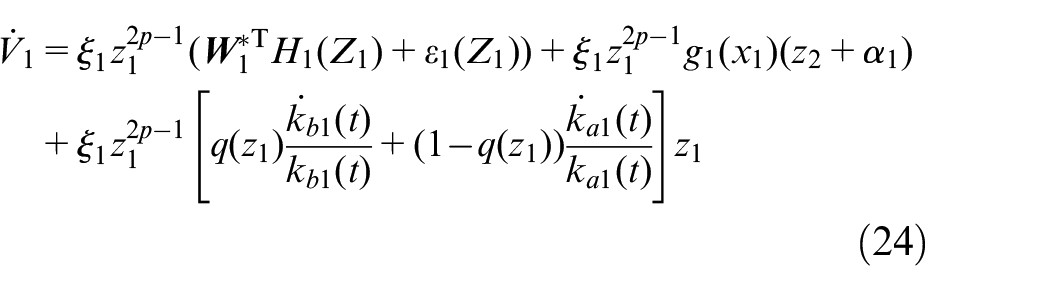
According to Young’s inequality, items in (24) would be amplified as

where
where
where
From (18), it gets that when

Substituting (29) in the item
Because
Meanwhile, we utilize Young’s inequality to obtain that
Substituting (25), (26), (30), (31), and (32) into (24) yields
Then, we define the

where

where the coupling term

given that
The unknown functions are defined as

where

Given
Define the
where and
Take time derivative of
Based on (36), (38), and (39), one would obtain that
Substituting (42) into (41), it yields
Youngs inequality is utilized to obtain that
where
where
Substituting (45) in the item
Because
By exploiting Young’s inequality, it would get
Substituting (46)–(48) into (43) leads to
Then, we define the

where
Based on the recursion procedure,
Substituting (52) back into (51), one can obtain

where
An integral non-singular terminal sliding manifold surface is designed as


where

It can be observed from (55) and (58) that

given that
The


Substituting (60) into (62) yields
By exploiting Young’s inequality, one gets
Substituting (64) into (63), it yields
Controller

where
Then, substituting (67) into (65), it yields
Because of
Therefore, we design the

After substituting (70) into (69) and let
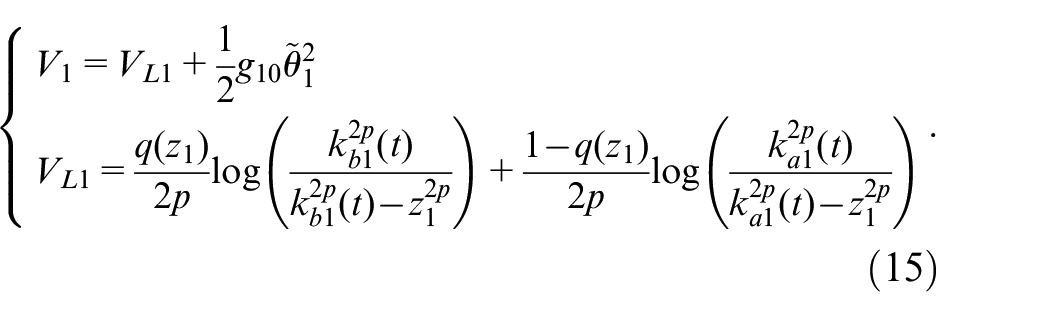
From (15), (40), and (69), it can be obtained that
By utilizing Young’s inequality, one gets
Therefore, (71) can be transformed to
According to Lemma 1, it would get
Let

According to Lemma 2, system in (1) under the proposed control algorithm would be stability and until now, it has finished the detailing designing procedure for suggested control algorithms. Following theorem showcases primary control methodology’s outcomes.

From (61) and (77), we can easily obtain that
Then, it can yields
Lastly, NITSMC methodology ensures whole system states deviation converges to zero within finite time and it manifests actual control signal’s boundedness based on the definition of
Until now, this completes the proof.
Simulation and results
Simulation examples get investigated to verify feasibility and effectiveness of suggested control technique here.
Simulations and comparison
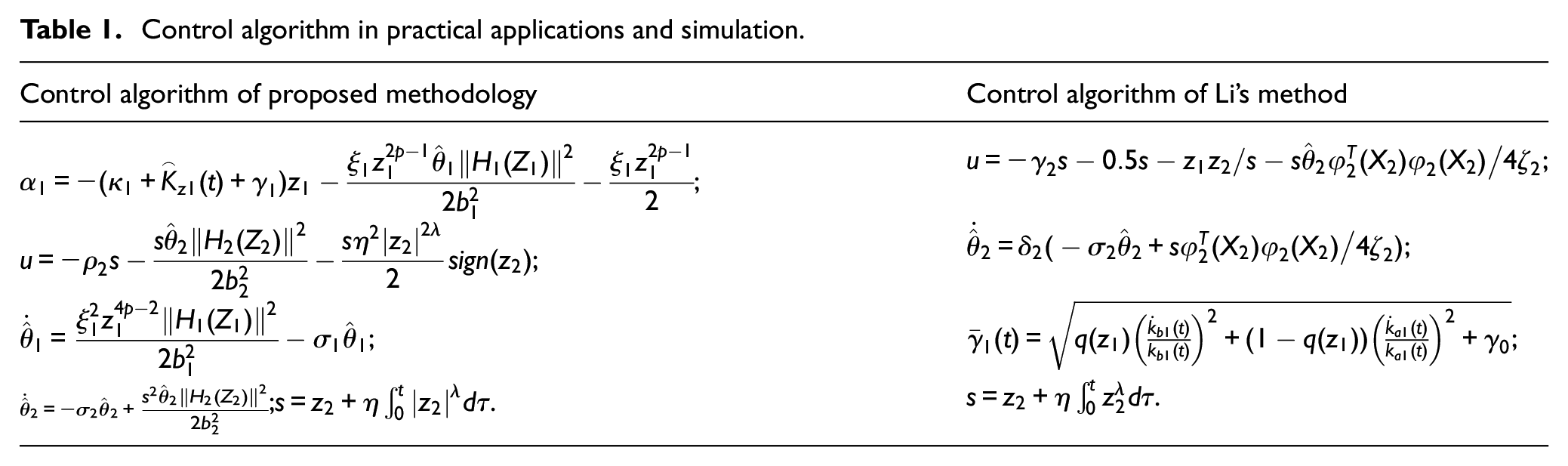
To further validate control method progressiveness proposed within this research, we conducted a comparative experiment with the method of Li. 25 To ensure a fair comparison, all parameters and models were standardized to match the original literature. The simulation results are depicted in Figures 2 to 7. Based on the aforementioned control design, the simulation control law is presented in Table 1.
Control algorithm in practical applications and simulation.

given that

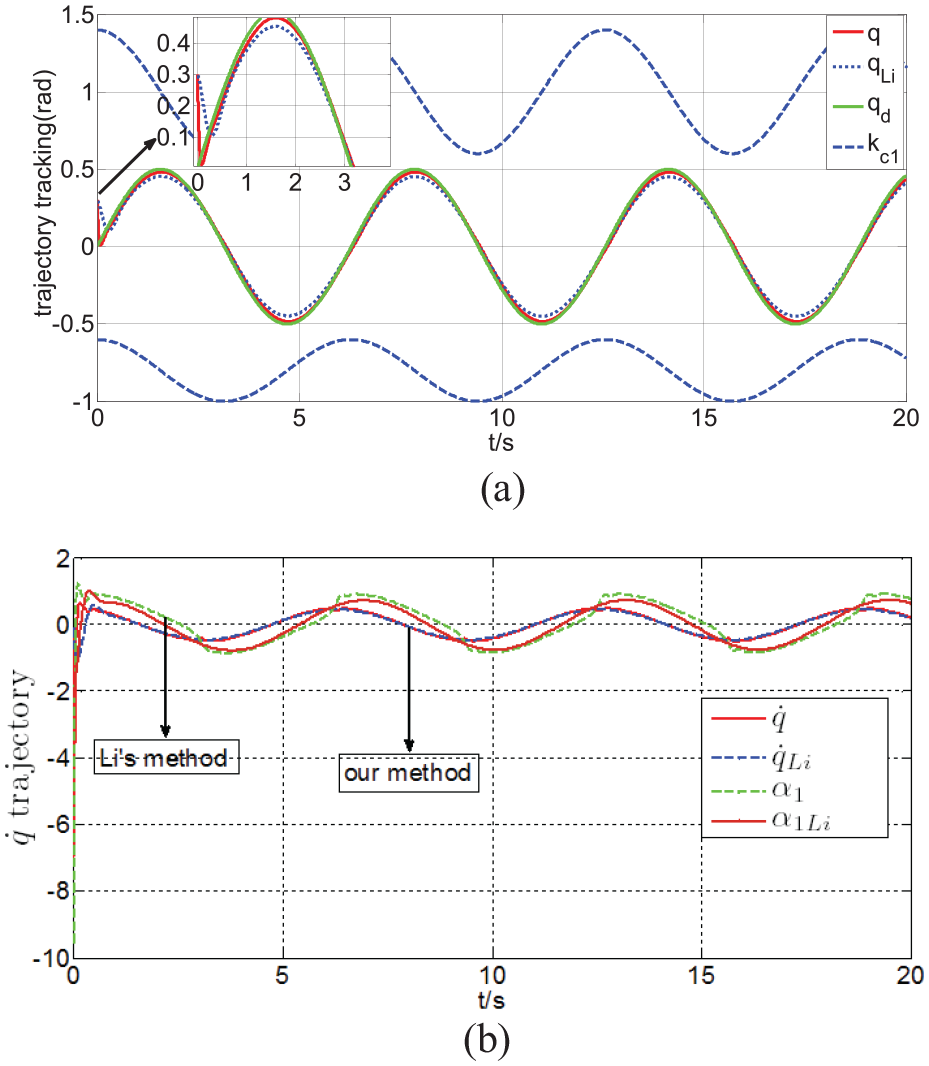
Trajectory of robot states subject to time varying constraint: (a) angle position tracking curves of robot with control algorithms and (b) Angular velocity tracking curves of robot with control algorithms
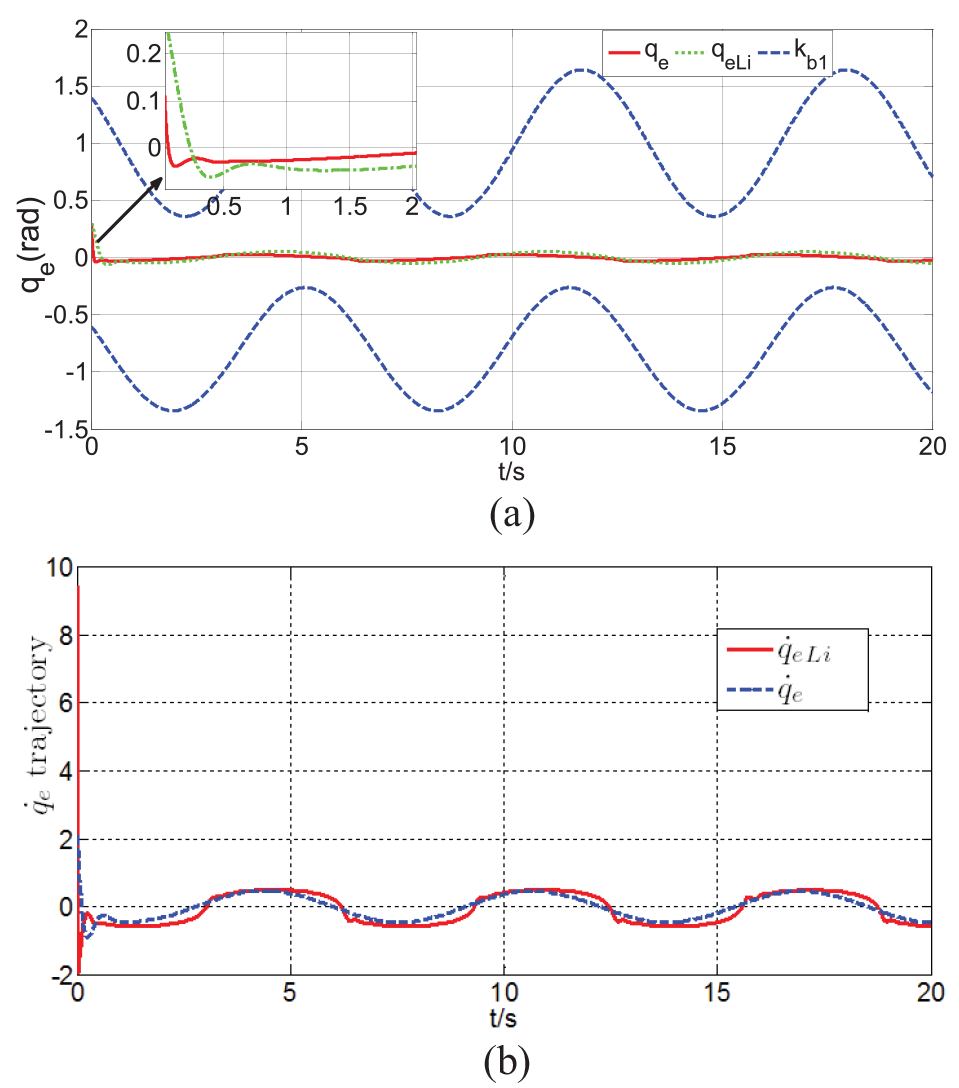
Trajectory tracking error of states subject to time varying constraint.
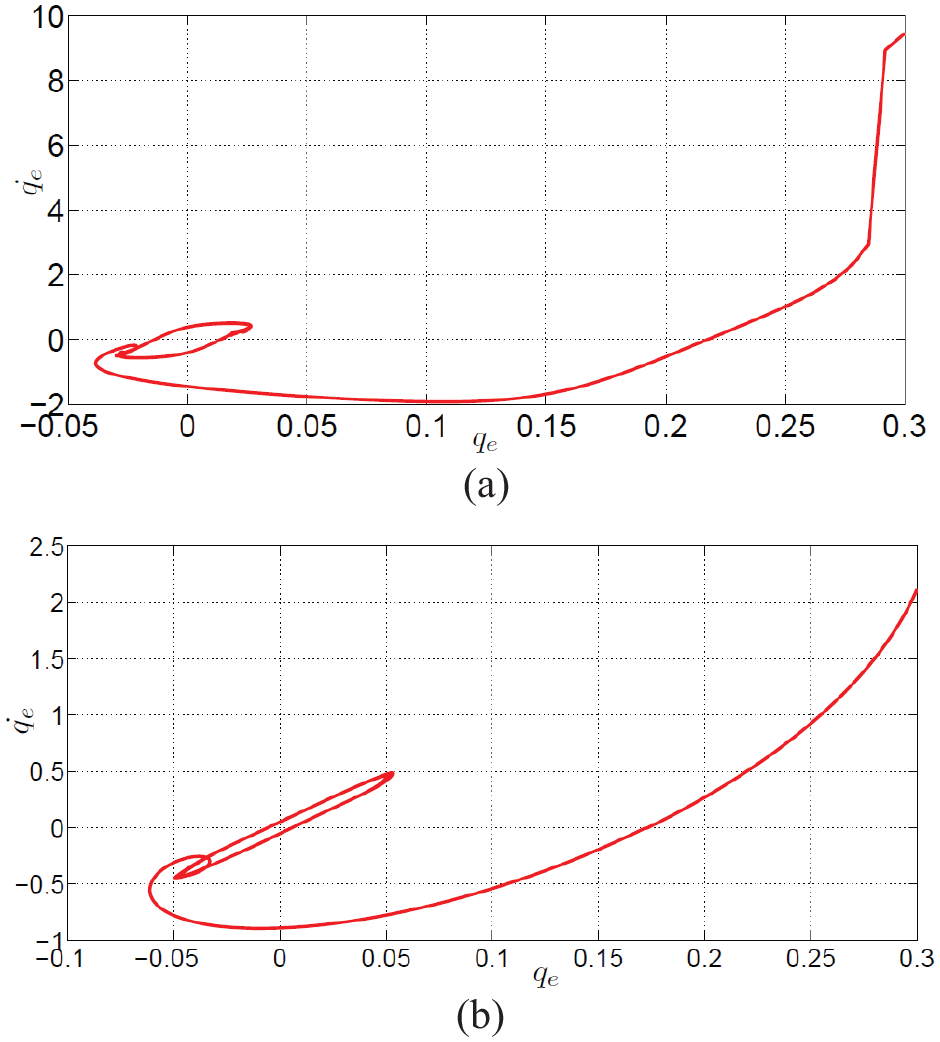
Phase portrait of tracking error and its derivation: (a) phase portrait of
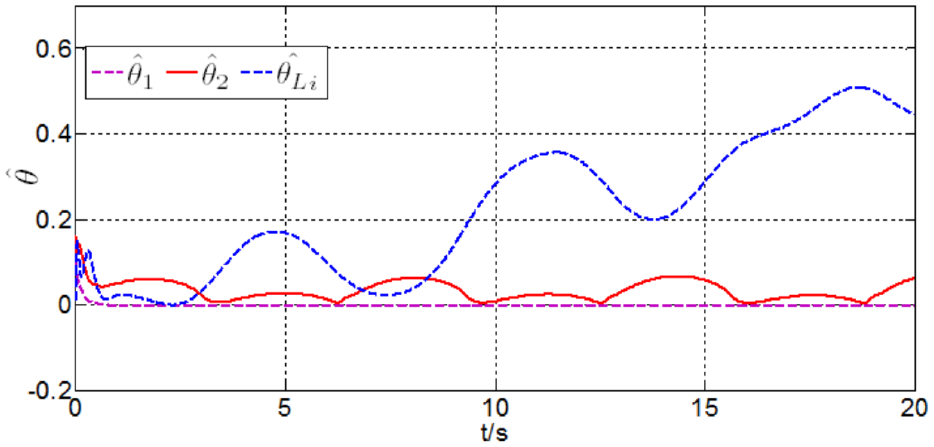
Weight value estimation of RBFNN of robot.
NITSMC manifold of robotic manipulator.
Control signal u(t) of robotic manipulator.
Initial states values serve as
Figure 2 shows that both the control algorithms can make the robot output signals precisely track ideal trajectory subjected to the TVSCs domain. Figure 2(b) manifests that the robot speed signal tracks the desired virtual control signal of
Figure 3 further witness the control performance by the robot position and speed tracking deviation. Although two methods make the position tracking error not transgress off the constraint boundary, suggested control algorithm attains superior control accuracy. Figure 4 depicts the graph for phase portrait of
Initial states values are
In this study, all the RBF-NNs have the uniform form such as (3). The RBF-NNs of
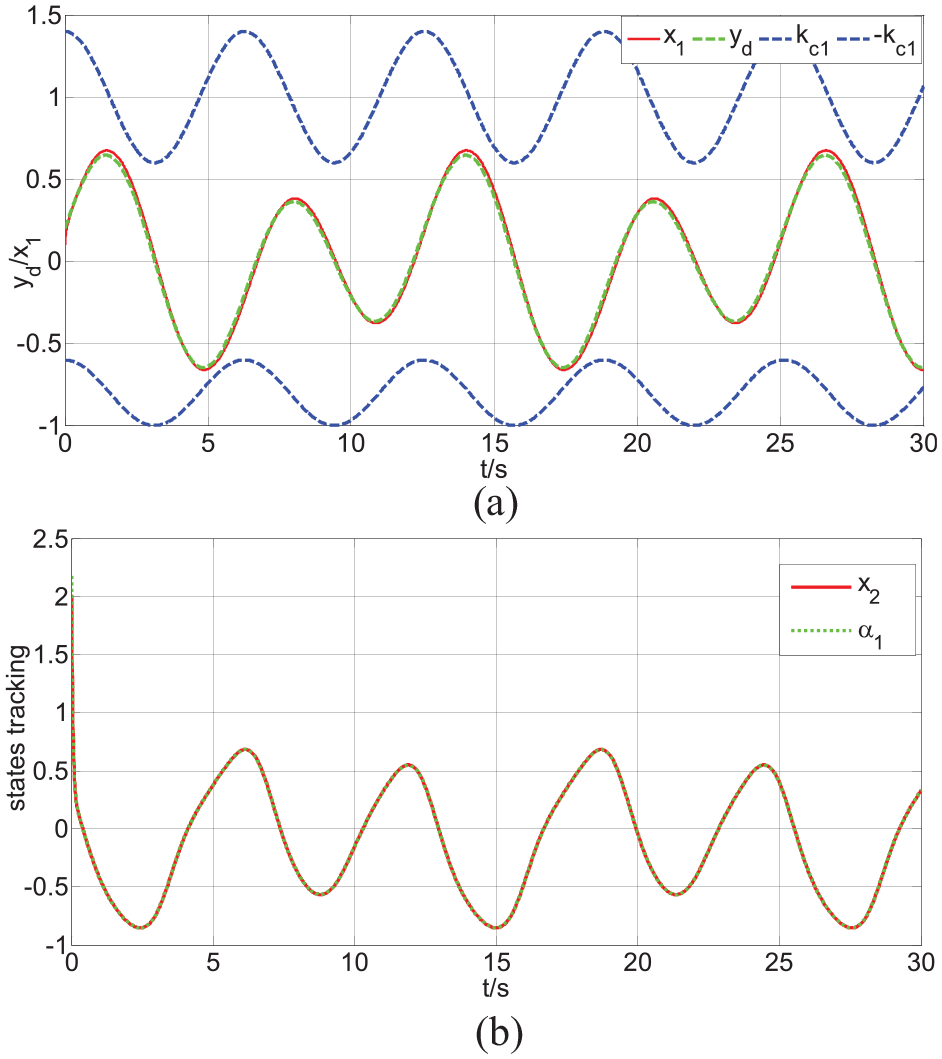
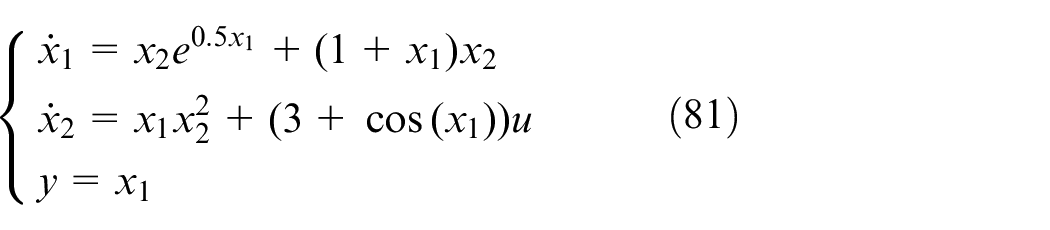
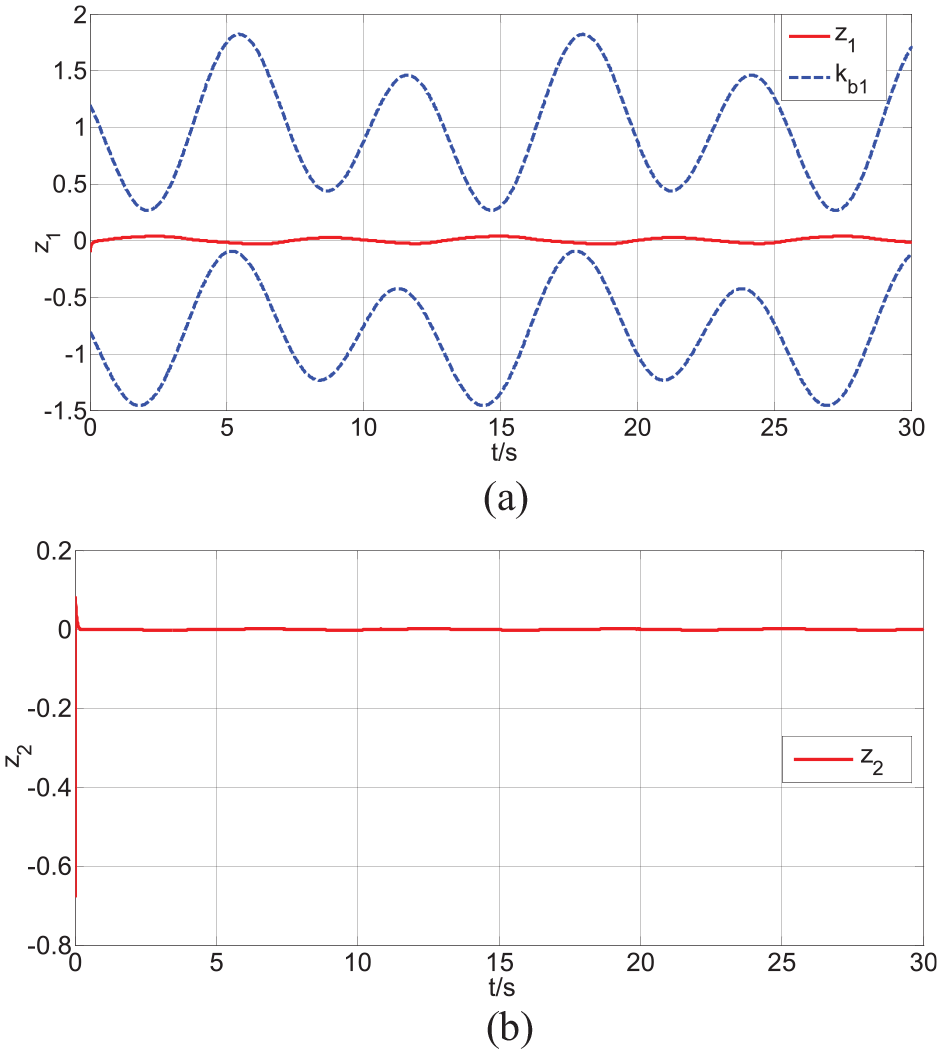
The tracing trajectory of the system states: (a) the tracking trajectory
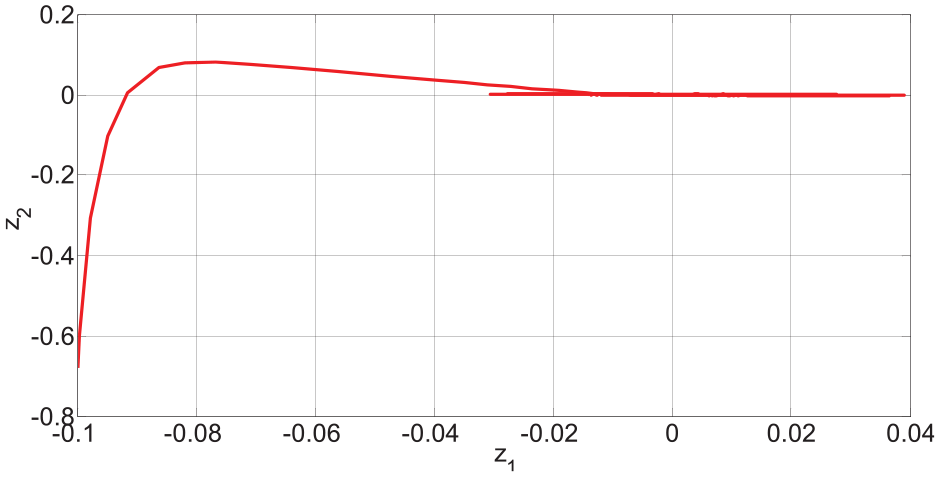
Phase portrait of
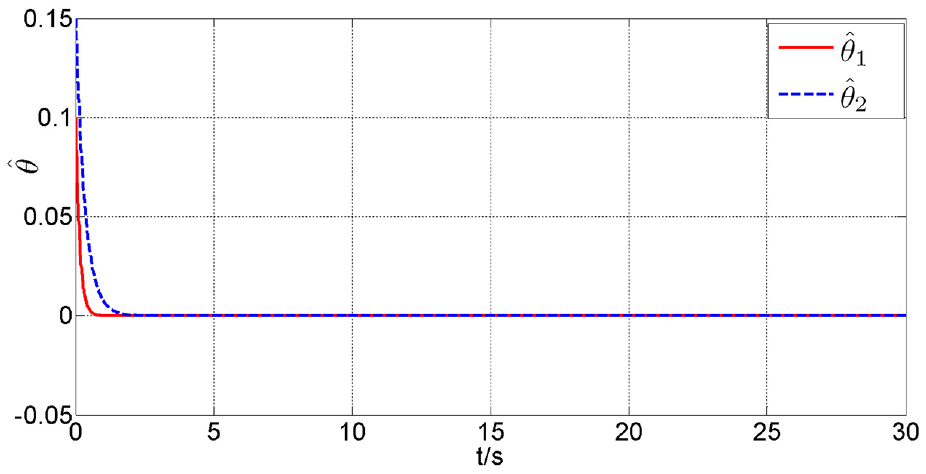
Estimation parameter
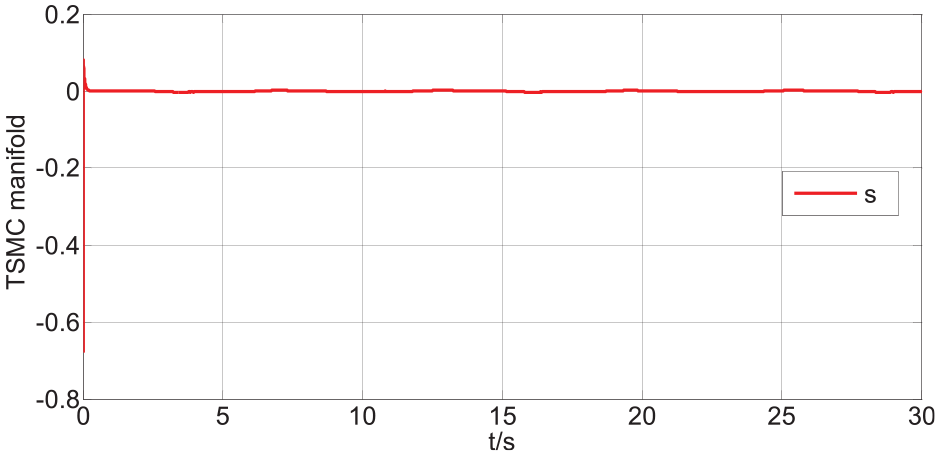
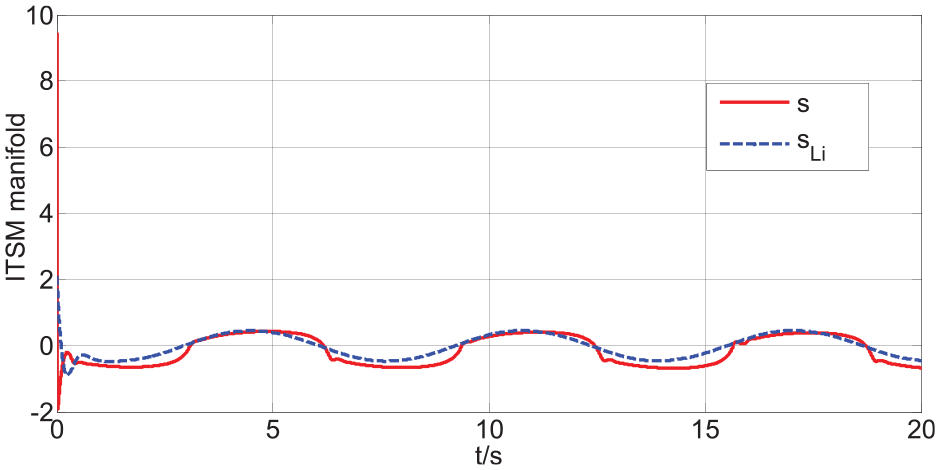
NITSMC manifold.
Figure 8 depicted two curves closely coincide, indicating excellent tracking performance. Output-state
Figure 9 depicts system’s states tracking errors under proposed control methodology. This figure further illustrates that, closed-loop system’s tracking errors do not exceed boundary, and the output trajectory error meet the conditions of
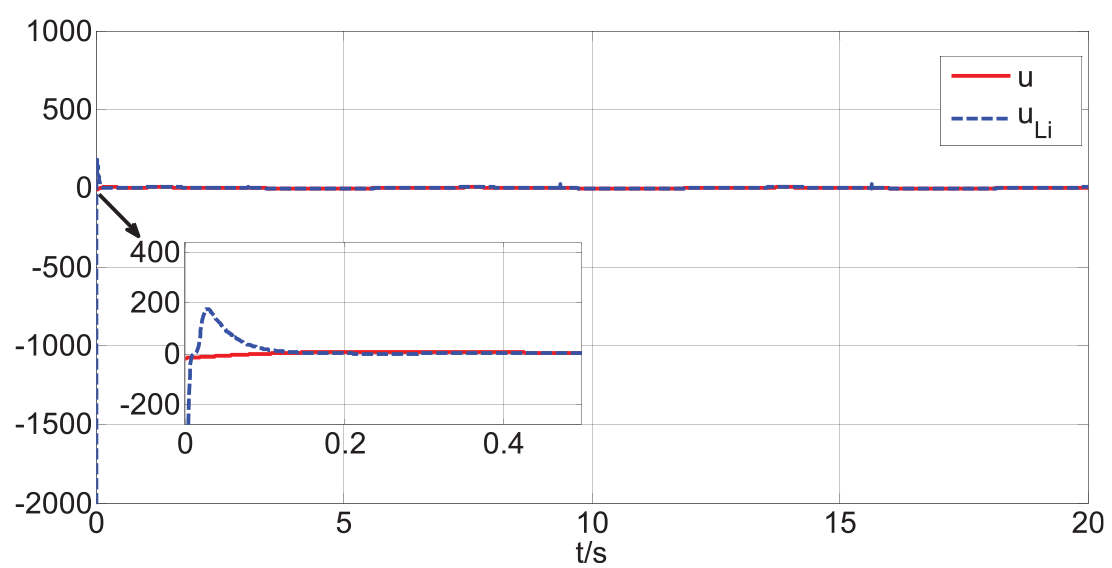
The RBF-NNs weights adaption laws are illustrated in Figure 11. We can get that the NNs adaption laws signal is bounded, what is more, the system uncertainty challenge is effectively managed by the NNs approximation. Furthermore, the algorithm not only simplifies the adaptation law but also ensures VCL existence and smoothness. Adaptation laws are designed to maintain boundedness for all signals throughout the entire closed-loop system. Figure 12 shows the integral nonsingular terminal sliding mode surface. Figure 13 is the control output signals
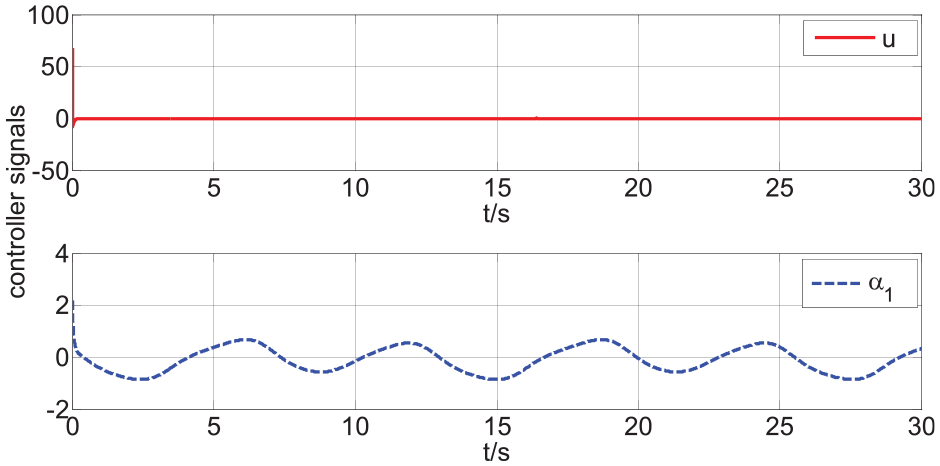
Controller output.
All in all, Figures 1 to 13 collectively demonstrate, all signals within closed-loop system maintain boundedness, and output state consistently adheres to constraint boundary at all times. Concurrently, asymptotically accurate tracking performance is achieved, and trajectory tracking errors converge within a finite time-frame. It’s evident that the signal from the adaptive NN controller signal of u remains moderate, affirming that our approach doesn’t amplify control energy to enhance control performance.
Theoretical comparison
This study focus on the a new adaptive asymmetric sliding mode control methodology with TVSCs to address finite-time trajectory tracking issues in uncertain nonlinear systems. In comparison to the previous works presented in Refs.23–26 and the latest findings in Refs.,36,41 the main characters of the proposed control method are:
(1) For the time varying states constraints, feasibility conditions are key factors in solving constraint problems. This research is conducted under the feasibility hypothesis of Lemma 5, thus it is constrained by the requirement that the initial error remains within the bounds of time-varying constraints. Fortunately, the literature36,41 presents a constraint solution method that does not require feasibility conditions, which is implemented by the virtual controls with predefined bounds and utilized a bounded function in the output error variable to solve the feasibility condition problem intrinsically BLFs. Compared with Ref., 23 feasibility conditions are removed by a new coordinate transformation based on a nonlinear state- dependent function method. In summarize, we will carry our future work by the above advanced methodology.
(2) To enhance the robustness of the control performance, sliding mode control together with states constraint control assures the state consistently stay within the specified boundaries, tracking errors rapidly converge to a confined range. Compared with Refs.,24–26 a barrier Lyapunov function approach is adopted with the states coordinate transformation and there also exists feasibility conditions, however, this paper can manage the time varying asymmetric states constraint conditions.
(3) Compared with Refs.,36,41 this paper only solve the adaptive neural network terminal sliding mode tracking control for uncertain nonlinear systems with TVSCs, but the system model in (1) not contains factors like measurement noise and more significant external disturbances and other nonlinerity like input deadzone and time delaying, therefore, in the next study, we will devote to above problems in Refs.36,41
Conclusions
This paper introduces an adaptive asymmetric TVSCs SMC methodology aimed at addressing trajectory tracking issues in unknown nonlinear systems. This paper proposes a control methodology utilizing back-stepping technique, which is designed to address trajectory tracking problems in unknown nonlinear systems. The control algorithm encompasses three main aspects. firstly, the RBF-NNs approximation function is utilized to handle uncertain components in controller design, effectively managing unknown parts in nonlinear systems, secondly, the ABLFs are employed to uphold state constraints condition’s satisfaction, thirdly, to improve system states tracking dynamic performance, the NITSMC methodology is explored. This approach ensures that entire system’s states deviation converges to a small zero compact set within a finite time. Moreover, in accordance with ABLFs theorem, it has been demonstrated that all the closed-loop signals remain bounded, asymmetric TVSCs are not violated, tracking error rapidly converges to a small zero compact set. In conclusion, suggested control methodology’s applicability and effectiveness are validated through ideal simulating outcomes. Moving forward, our future efforts will be directed toward addressing full state constraints using SMC with BLFs.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Ningbo Natural Science Foundation of China under Grant No. 2023J062, No. 2022J170 and General Scientific Research Project of Zhejiang Provincial Department of Education under Grant No. ZZT23108.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.