This study investigated a novel adaptive output feedback control scheme for non-strict feedback nonlinear systems with uncertainties, disturbances, and asymmetric time-varying output constraints. Because that the states of the system are unmeasurable, we used an adaptive fuzzy state observer to obtain the estimated values of the states. To make the output and tracking error satisfy their asymmetric time-varying constraints, an asymmetric time-varying barrier Lyapunov function was adopted. To overcome the “explosion of complexity” problem, we also adopted the dynamic surface control technology. The stability of the closed-loop system was proved by the Lyapunov method, and we give two simulation examples to show the effectiveness of the proposed control method.
Adaptive control of uncertain nonlinear systems has very important theoretical and practical significance. In recent decades, many studies have focused on this subject, producing many results. Among those results, much attention has been paid to adaptive backstepping control schemes based on a fuzzy system or a neural network as an approximator.1–8 However, the proposed methods can control only strict feedback systems or pure feedback systems and cannot achieve the control of a non-strict feedback system. If the controller of a non-strict feedback system is designed using the methods in refs,1–8 the algebraic loop problem will arise. This is because the virtual control signals are functions of all the state variables in the system.9 Therefore, a controller designed according to those methods cannot be used to control a non-strict feedback system.
In practical engineering, non-strict feedback systems are used more than strict feedback and pure feedback systems. Therefore, it is necessary to study in depth the stability or tracking control of non-strict feedback systems. In several studies,10–13 adaptive fuzzy tracking control schemes were designed for SISO or MIMO nonlinear systems in non-strict feedback form. But the control methods in refs10,11 require the existence of a strict increasing smooth function , such that the unknown function in a nonlinear system satisfies . Moreover, all the states of the systems in refs10–13 should be measurable. In practical engineering, it is impossible to measure all the states directly due to the limitation of sensors, installation positions, or measuring points. These strict limitations make that control method difficult to realize in practical applications.
Recently, a new control method for SISO non-strict nonlinear systems was proposed in ref.9 that uses variable separation to remove the previous monotonically increasing condition and does not require all state signals to be measurable. Ref.14 extended the state-observer-based adaptive backstepping control approach to MIMO non-strict feedback nonlinear systems. Ref.15 proposed a robust adaptive output control method for a class of non-triangular nonlinear systems with unmodeled dynamics and stochastic disturbances. However, all the control methods in refs9–15 had inherent “explosion of complexity” problems. In refs,16,17 the authors used dynamic surface control (DSC) technology to overcome the “explosion of complexity” problem for SISO and MIMO non-strict feedback systems control. However, output constraint problems were not considered in refs.9–17
In practical engineering, constraints exist on the system output or states. Only by limiting the output or states to the allowable range of the process, can the safety of the equipment and operators be ensured. To solve the problem of these constraints, many studies have used the barrier Lyapunov function (BLF).18–24 In refs,18,23 by using BLFs the authors designed an adaptive control method for a class of stochastic nonlinear systems with state constraints. On the basis of neural networks and the BLF,19,22 proposed an adaptive control for nonlinear constrained systems with an input delay and an input deadzone. By using the BLF,20 investigated an adaptive boundary control for a flexible manipulator with constraints. Ref.21 investigated an adaptive fuzzy output feedback control problem for a class of non-strict feedback time delay systems subject to a constraint problem. However, the constraints considered in refs18–24 are symmetric static constraints, whereas most of the constraints in practical engineering are asymmetric time-varying constraints.
To deal with asymmetric time-varying constraints, some researchers have proposed asymmetric time-varying BLFs (ABLFs).25–28 But all the control methods in those studies were aimed at strict feedback systems and required that all states be measurable. Ref.29 proposed an adaptive output control to overcome the prescribed performance problem of the non-strict feedback system. But that control method had the “explosion of complexity” problem, and the design of the performance function was more complex than that of a BLF. Few studies have considered output feedback control for non-strict feedback systems with output constraints.
Motivated by the above discussion, we investigated adaptive output feedback control for non-strict feedback systems with asymmetric time-varying output constraints and unknown external disturbances. This paper makes two main contributions that contrast with the previous literature: (1) For the first time, the adaptive output control scheme is addressed for uncertain nonlinear non-strict feedback systems with asymmetric time-varying output constraints and external disturbances. Moreover, by adopting DSC technology, this control scheme becomes very simple and avoids the problem of “explosion of complexity”. (2) The proposed control method does not need -order differentiable and bounded conditions of input signals and a monotonically increasing condition of unknown functions . These strict assumptions are common in previously proposed methods. In addition, unlike the existing literature,29–31 because a linear state observer can achieve only stability control, this paper adopts a control scheme based on a fuzzy state observer to achieve trajectory tracking control.
System description and basic knowledge
Consider the following nonlinear non-strict feedback system:
where is the state vector, is the control signal, and is the output of the system. , are unknown smooth functions of the nonlinear system. , are the unknown disturbances, and , where are unknown positive constants.
Control objective: The control objective is to keep the output tracking the desired trajectory , with the tracking error kept as small as possible. In this system, only can be measured directly, and other state variables need to be estimated online by a state observer, so an output feedback control strategy should be designed. Moreover, should be kept in the following bound:
where and such that , .
The system in equation (1) can be rewritten in matrix form:
where , , , and . Choose the vector to make be a strict Hurwitz matrix such that the following equation exists:
where is an any given positive definite diagonal matrix and is a positive definite symmetric matrix.
Assumption 1: There exist constants and , , such that , , , and , , .
Assumption 2: There exist functions and , satisfying and , , and a positive constant such that the desired trajectory and its time derivative satisfy and ,.
Adaptive fuzzy state observer design
In this paper, the states of system (1) are not available for feedback, so a fuzzy state observer needs to be established to estimate the states. A Fuzzy system is a universal approximator that is used to approximate unknown nonlinear functions. The general output form of the fuzzy system can be written as
where is the fuzzy basis function vector, and is the adjustable weight parameter vector.
Lemma 19: If is a continuous function defined on the compact set , then for any given small constant there exists a fuzzy system such that , where is an unknown positive constant.
By defining the estimation of as , the uncertain functions , , in the system (1) can be written as
where is the optimal value of , and is the minimal approximation error. The adaptive parameter error vector can be defined as .
The fuzzy state observer can be designed as
The observer error vector can be defined as . From equations (3) and (8), the observer errors equation can be written as
where and .
Adaptive output feedback control scheme design
To design the adaptive output feedback control scheme, we first defined . The tracking error can be written as . The virtual error of the second step is defined as , and the first virtual control law as . By letting pass through a first-order filter that has the time constant , we obtain :
By defining the filter output error as , we can have and .
The time derivative of can be obtained as
Let . Because we have and , there exists an unknown constant such that . Now the ABLF can be chosen as
where is a design parameter. , , and are defined as
By defining , , and , equation (12) can be rearranged as
The second step is to define , and the second virtual control law as . By letting pass through a first-order filter that has the time constant , we obtain :
By defining the filter output error as , we have and .
With the step , we define the virtual error of the step as and the virtual error of the step as . We define a virtual control law as . Letting pass through a first-order filter that has the time constant , we obtain
By defining the filter output error as , we have and .
To further illustrate the contributions of this method, some comparisons with previous results in refs10,11,18–25,28–32 will be given in this section.
(1) The control methods in refs22,28 can deal with only the nonlinear system (58) with a matching condition:
where the unknown functions , , and control input should be in the same equation of the state space model.
The control method in refs25–27 deals with strict feedback system (59):
where . Then and are the functions of partial state variables.
While the control method in this paper is designed for the non-strict feedback system:
where , and is the functions of whole state variables.
When the controller of the non-strict feedback system is designed by the control methods in refs,22,25–28 the virtual control signal and adaptive law of each subsystem are the functions of whole state variables. Consequently, the algebraic loop problem arises, which makes the controller design of a non-strict feedback system very difficult. Therefore, the controller design method of the non-strict feedback system (66) considered in this paper is quite different from that of the controller design methods in refs.22,25–28
(2) Refs10,11 proposed adaptive control methods for the non-strict feedback system (60), but unknown nonlinear functions in the system are required to satisfy a strict assumption, that there exists a strict increasing smooth function such that unknown functions satisfy . Moreover, all states of the system in refs10,11,22,25–28 should be measurable. These strict limitations make control methods difficult to realize in practical applications. Therefore, control methods in refs10,11,22,25–28 cannot be used to control a non-strict feedback nonlinear system, which does not satisfy the monotonously increasing property with unmeasurable state variables that is discussed in this paper.
(3) The constraint considered in refs18–24 is a symmetric static constraint rather than the asymmetric time-varying constraint discussed in this paper. The control method in refs21,29–32 can deal with only stable control because it is based on the linear observer (61):
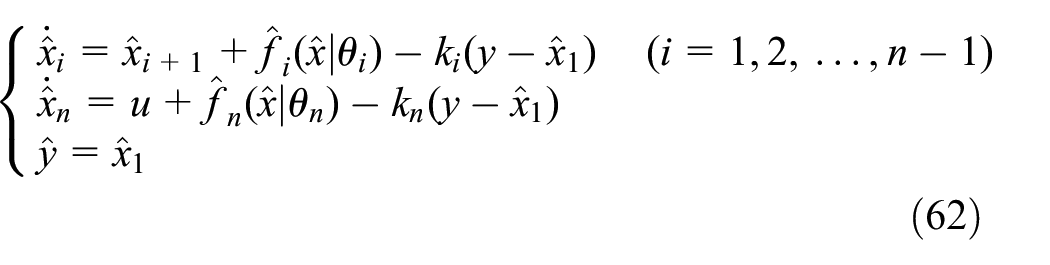
Different from the linear observer in refs,21,29–32 the fuzzy state observer (62) is adopted in this paper:
Because a linear observer cannot estimate the state variables effectively, it can achieve only stability control, whereas a fuzzy state observer can estimate the unmeasurable state very well, so it can achieve tracking control. Finally, most of the control methods in refs10,11,18–25,28–32 have the “explosion of complexity” problem, whereas the control method in this paper solves this problem by using DSC technology.
Stability analysis
By defining the Lyapunov function of the closed-loop system as , we obtain the derivation of as equation (57). By choosing , (), , , and , according to a lemma in a previous paper (Lemma 2 in ref.26), we obtain
We define
Then we obtain
On the basis of the initial condition , we have , that is . Then, according to a lemma in a previous paper (Lemma 1 in ref.26), we obtain , , and bounded in the set of . Because , we obtain . Then according to , we obtain the condition that for all , the condition holds. Then , can be deduced.
From equation (66), we can show that the signals of the closed-loop system, such as , , , , and , are semi-globally uniformly ultimately bounded (SGUUB). Moreover, the observer error satisfies , the tracking error satisfies , and the output of the system can be kept within the limits of the given asymmetric time-varying output constraints.
According to the definitions of and , the observer error and the tracking error can be reduced by choosing appropriate design parameters, such as by increasing , , , and or by decreasing . However, from equations (25), (40), (48), and (55) we can know that reducing observer error and tracking error will lead to an increase of the control signal. Therefore, in practical engineering, the tracking error and the control signal should be considered comprehensively when parameters are chosen.
Simulations
This section presents two simulation examples to illustrate the feasibility and effectiveness of the proposed control scheme.
Example 1
Consider the following second-order non-strict feedback system:
where , , , and . The reference signal is given as . The constraints are given as and .
Because the nonlinear functions and contain the whole state variables, the system in equation (1) is a typical non-strict feedback nonlinear system. Moreover, there does not exist a class function such that , so and do not satisfy an assumption given in previous studies (Assumption 3 in refs10,11). Therefore, we cannot use the control method in those studies to control the system in equation (67). However, from the simulation results, we can see that the control objective can be achieved by using the control method described in this paper.
In contrast to the linear observer in previous studies,29–32 this study adopts a fuzzy state observer. Because a linear observer cannot estimate the state variables effectively, it can achieve only stability control. A fuzzy state observer can estimate the unmeasurable state very well, so it can achieve tracking control.
We choose the fuzzy membership function as , where and , and choose the parameters as , , , , , , and .
The state observer is designed as
The initial conditions of the system and observer are chosen as and . All the initial values of the adaptive parameters are chosen to be 0.
To show the superiority and validity of the method proposed in this paper, we compare it with a scheme in ref.16 The control method in ref.16 is an adaptive control that deals with a non-strict feedback system without considering the constraints. The related parameters and the initial conditions in both methods are similarly selected.
In the simulation, system 1 is controlled by the method in this paper, whereas system 2 is controlled by the method in ref.16Figures 1 to 5 show the simulation results. From Figures 1 and 2, we can see that the output and the tracking error of system 1 can both be kept within the constraints, whereas the output and the tracking error of system 2 violate the constraints. Thus, the proposed adaptive control approach in this paper not only guarantees the boundedness of all the signals in the closed system and the tracking error converges to a small neighborhood of the origin, but also achieves better control performance than that of the control method in ref.16
Trajectories of , and the output constraints (Example 1).
The tracking error and the error bounds (Example 1).
The trajectories of and (Example 1).
The trajectories of and (Example 1).
The control input (Example 1).
Example 2
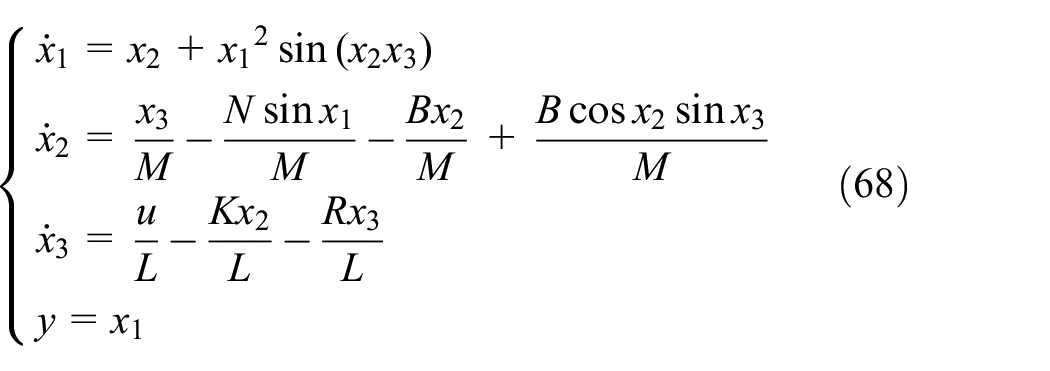
This simulation example is of a permanent magnet brush dc motor system, which can be expressed as30:
where , , , , , , , , , , , , , and . The input signal is , and the constraints are and .
We choose the fuzzy membership function as , where and . We choose the parameters in the controller and in the adaptive laws as , , , , , , , , , and .
The state observer is designed as
The initial conditions of the system and observer are chosen as and . All the initial values of the adaptive parameters are chosen to be 0.
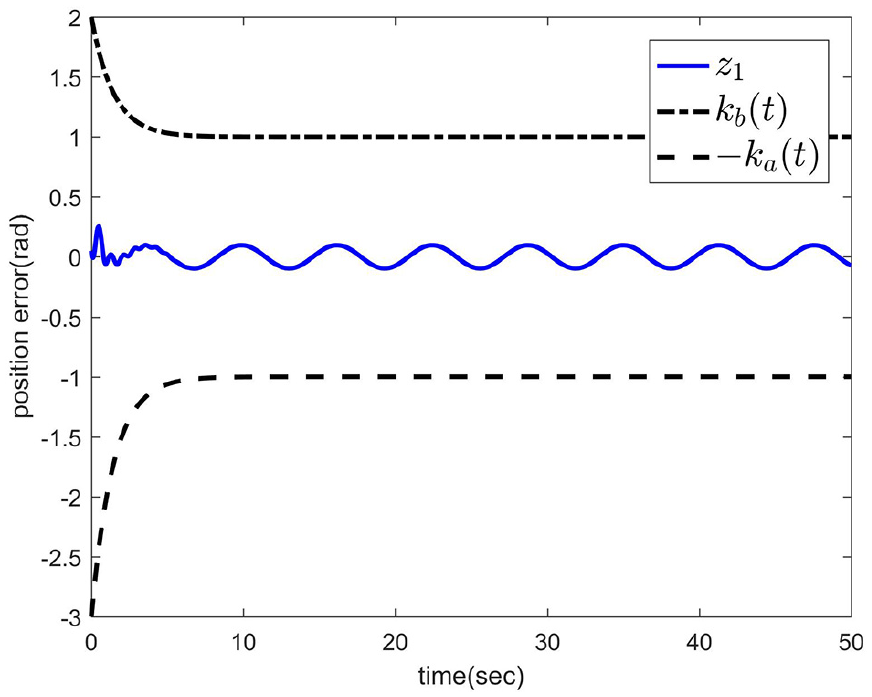
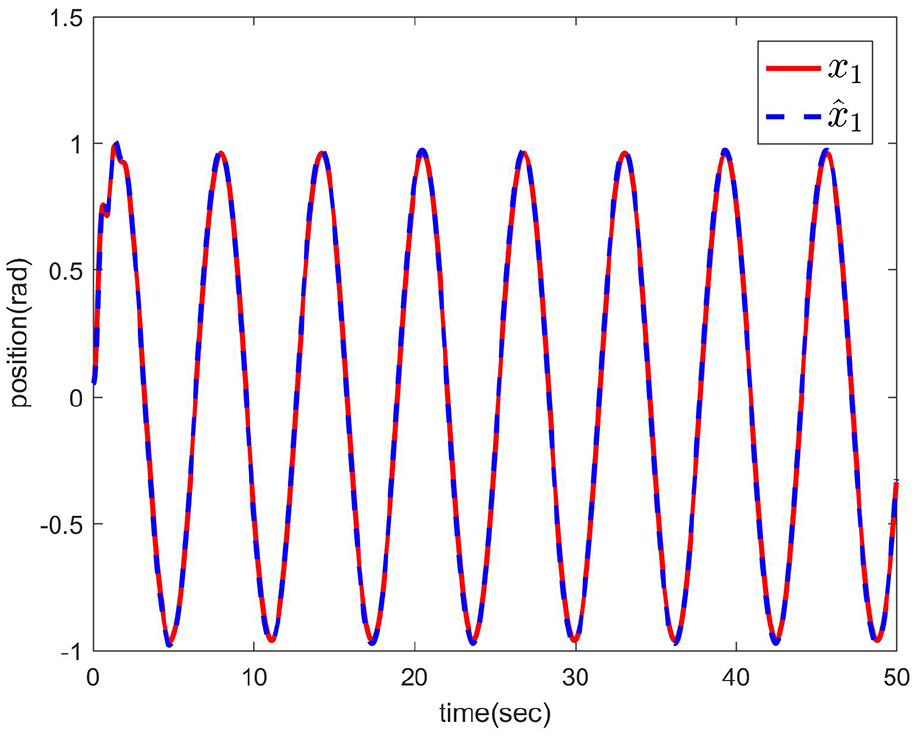
Figures 6 to 11 show the simulation results. Figure 6 shows the output and the asymmetric constraints; the figure makes it clear that , , and that the output can track the desired trajectory very well. Figure 7 shows the tracking error and the error bounds. The figure shows that always satisfies , . Figures 8 to 10 show , , and , and their estimates , , and , respectively. Figure 11 shows the control input . The simulation results clearly show, that the proposed output control scheme is capable of guaranteeing the boundedness of all the signals in the closed-loop system, such as and , , and , without violating the asymmetric time-varying output constraints.
Trajectories of , and the output constraints (Example 2).
The tracking error and the error bounds (Example 2).
The trajectories of and (Example 2).
The trajectories of and (Example 2).
The trajectories of and (Example 2).
The control input (Example 2).
Conclusion
This paper proposes an adaptive output control scheme for uncertain non-strict feedback nonlinear systems with asymmetric time-varying output constraints. To estimate the unmeasurable states in the system, we designed a fuzzy adaptive state observer. To satisfy the asymmetric time-varying constraints of the output signal, an ABLF was adopted. To deal with the “explosion of complexity” problem, DSC technology was used for backstepping control. Finally, the Lyapunov method was used to prove the stability of the closed-loop system and the SGUUB of signals. Moreover, the tracking error could be kept within a sufficiently small neighborhood of 0 by choosing the appropriate parameters. Future research directions are the extension of the results to switched non-strict feedback nonlinear systems and stochastic nonlinear systems.
Footnotes
Handling Editor: James Baldwin
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by National Natural Science Foundation of China (51775463).
ORCID iD
Min Wan
References
1.
PanYSunTLiuY, et al. Composite learning from adaptive backstepping neural network control. Neural Netw2017; 95: 134–42.
2.
LinZLiuXLiY. Adaptive fuzzy control for nonlinear pure-feedback systems with external disturbance and unknown dead zone output. Int J Fuzzy Syst2017; 19: 1940–1949.
3.
LiuWLimCCShiP, et al. Backstepping fuzzy adaptive control for a class of quantized nonlinear systems. IEEE Trans Fuzzy Syst2017; 25: 1090–1101.
4.
ZhouQWangLWuC, et al. Adaptive fuzzy tracking control for a class of pure-feedback nonlinear systems with time-varying delay and unknown dead zone. Fuzzy Sets Syst2017; 329: 36–60.
5.
WanMLiuQ. An improved adaptive fuzzy backstepping control for nonlinear mechanical systems with mismatched uncertainties. Automatika2019; 60(1): 1–10.
6.
LiuLLiuY-JTongS. Neural networks-based adaptive finite-time fault- tolerant control for a class of strict-feedback switched nonlinear systems. IEEE Trans Cybern2019; 49: 2536–2545.
7.
GaoTLiuY-JLiuL, et al. Adaptive neural network-based control for a class of nonlinear pure-feedback systems with time-varying full state constraints. IEEE/CAA J Automatica Sinica2018; 5: 923–933.
8.
QiuJSunKWangT, et al. Observer-based fuzzy adaptive event-triggered control for pure-feedback nonlinear systems with prescribed performance. IEEE Trans Fuzzy Syst 2019; 27: 2152–2162.
9.
TongSLiYSuiS. Adaptive fuzzy tracking control design for SISO uncertain nonstrict feedback nonlinear systems. IEEE Trans Fuzzy Syst2016; 24: 1441–1454.
10.
ChenBLinCLiuX, et al. Adaptive fuzzy tracking control for a class of MIMO nonlinear systems in nonstrict-feedback form. IEEE Trans Cybern2015; 45: 2744–2755.
11.
WangHLiuXLiuK, et al. Approximation-based adaptive fuzzy tracking control for a class of nonstrict-feedback stochastic nonlinear time-delay systems. IEEE Trans Fuzzy Syst2015; 23: 1746–1760.
12.
ZhouQWangLWuC, et al. Adaptive fuzzy control for nonstrict-feedback systems with input saturation and output constraint. IEEE Trans Syst Man Cybern Syst2017; 47: 1–12.
13.
LiHBaiLZhouQ. Adaptive fuzzy control of stochastic nonstrict-feedback nonlinear systems with input saturation. IEEE Trans Syst Man Cybern Syst2017; 47: 2185–2197.
14.
WangNTongS. Observer-based adaptive fuzzy control of a class of MIMO non-strict feedback nonlinear systems. J Franklin Inst2018; 355: 4873–4896.
15.
LiYLiuLFengG. Robust adaptive output feedback control to a class of non-triangular stochastic nonlinear systems. Automatica2018; 89: 325–332.
16.
WangNTongSLiY. Observer-based adaptive fuzzy dynamic surface control of non-linear non-strict feedback system. IET Control Theory Appl2017; 11: 3115–3121.
17.
SuiSTongS. Observer-based adaptive fuzzy quantized tracking DSC design for MIMO nonstrict-feedback nonlinear systems. Neural Comput Appl2018; 30: 3409–3419.
18.
LiuY-JLuSTongS, et al. Adaptive control-based Barrier Lyapunov Functions for a class of stochastic nonlinear systems with full state constraints. Automatica2018; 87: 83–93.
19.
LiD-PLiuY-JTongS, et al. Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans Cybern2019; 49: 1249–1258.
20.
JiangTLiuJHeW. Adaptive boundary control for a flexible manipulator with state constraints using a barrier lyapunov function. J Dyn Syst Meas Control2018; 140: 081018.
21.
YiJLiJLiJ. Adaptive fuzzy output feedback control for nonlinear nonstrict-feedback time-delay systems with full state constraints. Int J Fuzzy Syst2018; 20: 1730–1744.
22.
HeWDongYSunC. Adaptive neural network control of unknown nonlinear affine systems with input deadzone and output constraint. ISA Trans2015; 58: 96–104.
23.
SunKMouSQiuJ, et al. Adaptive fuzzy control for nontriangular structural stochastic switched nonlinear systems with full state constraints. IEEE Trans Fuzzy Syst2019; 27: 1587–1601.
24.
WanMLiuQ. Adaptive fuzzy backstepping control for uncertain nonlinear systems with tracking error constraints. Adv Mech Eng2019; 11: 1–11.
25.
LiuY-JLuSLiD, et al. Adaptive controller design-based ABLF for a class of nonlinear time-varying state constraint systems. IEEE Trans Syst Man Cybern Syst2017; 47: 1546–1553.
26.
EdalatiLKhaki SedighAAliyari ShooredeliM, et al. Adaptive fuzzy dynamic surface control of nonlinear systems with input saturation and time-varying output constraints. Mech Syst Signal Process2018; 100: 311–329.
27.
WanMLiuQZhengJ, et al. Fuzzy state observer-based adaptive dynamic surface control of nonlinear systems with time-varying output constraints. Math Problems Eng2019; 3683581.
28.
TeeK PRenBGeSS. Control of nonlinear systems with time-varying output constraints. Automatica2011; 47: 2511–2516.
29.
ZhouQLiHWangL, et al. Prescribed performance observer-based adaptive fuzzy control for nonstrict-feedback stochastic nonlinear systems. IEEE Trans Syst Man Cybern Syst2018; 48: 1747–1758.
30.
ChenBZhangHLinC. Observer-based adaptive neural network control for nonlinear systems in nonstrict-feedback form. IEEE TransNeural NetwLearn Syst2016; 27: 89–98.
31.
LiYSuiSTongS. Adaptive fuzzy control design for stochastic nonlinear switched systems with arbitrary switchings and unmodeled dynamics. IEEE Trans Cybern2017; 47: 403–414.
32.
LiYTongS. Adaptive fuzzy output-feedback stabilization control for a class of switched nonstrict-feedback nonlinear systems. IEEE Trans Cybern2017; 47: 1007–1016.