This paper investigates the problem of fuzzy adaptive finite-time formation tracking control for unmanned ground vehicles (UGVs) systems with two different constraints. By utilizing the distance tracking error between the actual trajectory and the desired trajectory of each UGV, as well as the constraints of bearing angle, to achieve the performance and feasibility constraints, respectively. Furthermore, the fuzzy logic systems (FLSs) are used to approximate unknown nonlinear functions. Due to the limitations of the field of view and communication distance of UGVs, the controller is designed by using finite time stability theory and universal barrier function. Under the proposed control scheme, the stability of the closed-loop system can be ensured, feasibility and performance constraints are also achieved. Finally, the effectiveness of the proposed control design is verified through simulation results.
In recent years, UGVs have received more applications and attention in both civilian and military fields.1–3 In,4,5 the author proposed path planning for the UGVs system, enabling UGVs to autonomously navigate. The author considered the situation of the UGVs encountering obstacles in complex environments in.6,7 The author proposed a trajectory planning and tracking strategy in,6 the purpose is to ensure the safety of UGVs in uncertain environments, in7 designed a fuzzy neural network obstacle avoidance algorithm through multi-sensor information fusion. In,8 the characteristics of unmanned aerial vehicle (UAV)/UGVs are used, heterogeneous systems can collaborate to track and complete many complex tasks.
Formation control is crucial for multiple UGVs systems, with the goal of forming a target formation based on predetermined geometric shapes. The formation control of UGVs has several distinct advantages such as high efficiency and distributed communication, which has led people to pay more and more attention to it in.9–11 Generally, the target of formation control of multiple UGVs is to prompt all UGVs to follow the required trajectories to keep a desired structure.12,13 Significantly, when designing controllers for multiple UGV formations, many issues need to be addressed. The main method contained leader-follower method,14–16 virtual leader/virtual structure method,17 behavior base method18,19 and graph rigidity base method.20,21 The leader-follower method is the most effective method in formation control. At the same time, many problems need to be considered in formation control.
More importantly, performance is the primary issue in formation control, which includes the precise operation and safety of multiple UGV systems. In,22–26 security issues are usually defined to some extent as collision avoidance issues, which requires that the distance between agents should not be too small. However, the detection range may vary in practical operation and different environments. Meanwhile, the design of the formation controller is also feasible. In,27–31 barrier Lyapunov functions are used to satisfy the constraint of heading angle. Meanwhile, it is worth noting that in,32–34 fuzzy logic systems (FLSs) and neural networks (NNs) are effective tools for solving the problem of multi-agent systems. Therefore, the author proposed a multi-agent formation control decentralized adaptive control scheme in,32 which includes artificial potential energy functions and robust control method. In,33 the author studied the adaptive optimization formation control problem of stochastic multi-agent systems. In control design, fuzzy logic systems were applied to approximate nonlinear functions.
Finite time convergence is a very important characteristic. In,34 a finite time adaptive neural network control scheme through dynamic surface technology was developed for nonlinear systems. In,35,36 the authors proposed a finite time control method to ensure the finite time tracking performance of the system and the boundedness of all signals. The author studied the distributed finite time formation tracking control problem of multiple quadcopter UAVs under external disturbances in.37 In,38 the finite time formation tracking control of multi-agent systems with obstacle avoidance function was studied. In,39 the problem of prescribed performance adaptive asymptotic tracking control for a class of nonlinear systems with time-varying parameters was studied. In,40 the issue of adaptive fuzzy prescribed performance tracking control is considered.
In this paper, a novel adaptive fuzzy finite-time formation control design method is developed for a set of multiple UGVs. In the control design, combining finite-time stability theory and backstepping control design, all constraints that can meet the safe and accurate operation of multiple UGVs systems and the feasibility of controllers can be ensured. The main contributions of this paper can be highlighted as follows:
This article proposes an adaptive finite time formation tracking control scheme for UGVs systems. It is noted that references6,8,41 have also studied the formation tracking control problem of UGVs systems, but the above developed control methods cannot ensure that each UGV tracks the leader’s trajectory within a finite time.
Different from the existing related works.42,43 this article not only proposes a performance function for maintaining connectivity and collision avoidance , but also considers different constraints to ensure the safe operation of UGVs and the precise operation of UGV systems.
The distribution of other parts of this article is as follows. In Section “Problem formulations,” the description of the problem, including dynamic models and communication range constraints was provided. In Section “Formation controller design,” the formation controller was designed, while utilizing Lyapunov theory to ensure the stability of the system. In Section “Simulation studies,” the effectiveness of the proposed method was verified through simulation results. Section “Conclusions,” draw conclusions.
Problem formulations
UGVs dynamics
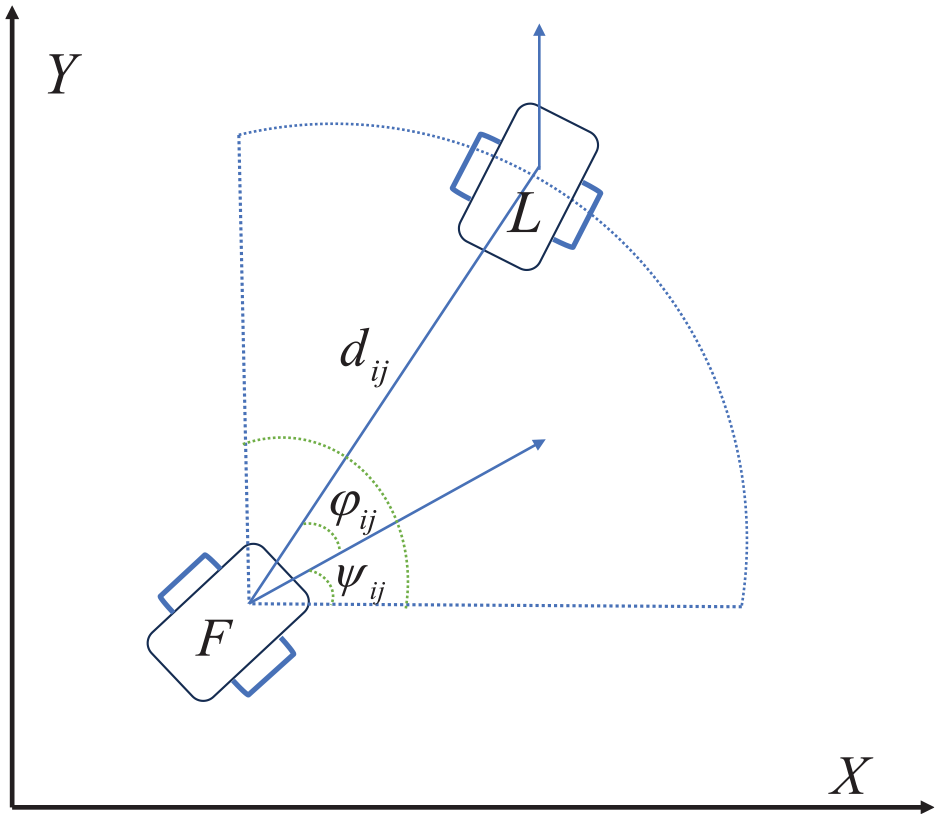
Considering the planar motion, about the L-F UGVs formation structure model, the label denotes the follower, the label denotes the leader. The kinematic equations of the unmanned ground vehicles system are expressed as44:
where represents the th UGV. and are coordinates of UGV and heading angle of UGV, respectively. and are angular velocity and linear velocity of UGV, respectively. The dynamic equations from system (1) can be defined as
where and are unknown functions are associated with variables and . and are actual controllers of UGV. The parameters and are positive constants, , , with UGV wheel radius , let assume system parameters , , and are known constants due to the uncertainty of the model (Figure 1).
The L-F UGVs formation structure.
It is important to note that the functions and are unidentified in the dynamic equations (2). According to the FLSs and to approximate the functions and , then we have
where is an approximate variable, and are the minimal approximation errors. and are extremely small constant, in which satisfy and .
Lemma 1.45 For any , the following inequality holds:
Leader-follower formation under communication range constraint
In the structure of L-F model of UGV, and represent the distance and the bearing angle between the th UGV and the th UGV, respectively, which are defined as
where represents the th UGV, represents the th UGV. is an arctangent function.
In the information exchange process of the L-F model, any UGV can gain the orientation and position of direct leader. Thus, the boundedness on the field of view and collision avoidance between UGVs are very significant questions in practical formation control. Accordingly, so as to realize range constraints, the following angle and distance constraints are expressed as
where represents the maximum value of communication and is the minimum distance for collision avoidance. represents the maximum angle value for maintaining communication. The definition of formation tracking errors are as follows
where and represent the desired bearing angle and the desired distance between th UGV and th UGV, respectively.
During the operation, performance constraint needs to be satisfied. Therefore, for the th UGV, the distance tracking error must satisfy the following inequality:
Additionally, we introduce the bearing angle with a feasibility constraints:
The steady-state and transient performance of tracking error is an significant parameter in the process of designing controllers. The error can not only be limited within a certain constraint range, but also fluctuate between the upper and lower limits. In order to facilitate the formation of (9) and (10), the following asymmetric restrictions are given:
where is a constrained function, and is positive performance function through design, can be represented as
where , , , , and are given quantities. To realize the standardization of errors boundary, define the error variables,
To solve the above constraint problems, then realize the interflow and tracking trajectory of UGVs within an required range, let introduce the following functions as
Remark 1: It is worth noting that functions and are universal barrier functions, which are handy for designing virtual controllers to solve tracking problems. This is due to its unique property that and will become or when and are close to the boundaries of constraint , and , . Therefore, we only need to ensure the stability of universal barrier functions, then and can be restricted within the constraint boundary.
Formation controller design
In this section, an adaptive fuzzy finite-time formation control design method will be developed to ensure the specified transient and steady-state performance in asymptotically stable error systems.
Step 1: To enable all UGV followers of the formation to track the leader’s reference path, designing the actual controllers and the virtual controllers for th UGV through backstepping method. To realize the desired formation, tracking error is expressed as follows
where and are virtual control inputs.
Step 2 : Based on systems (1)–(2) and L-F formation models (3)–(4), differentiating (7) and (8) has
where , , and are linear velocity and heading angle for leader. Due to the limited sensors capability of UGVs makes it hard to exactly determine the above variables. Nevertheless, the UGVs onboard sensors can gain bearing angle and relative the distance , and obtain velocities and through velocity sensors.
Consider the following Lyapunov function as for Step 1:
Therefore, the is
where and are known continuous functions.
Among them, and are defined as follows, respectively.
where , in which and . represents the leaders linear velocity, represents the maximum value of and represents the estimated value of , the relative correlation of them is . Furthermore, the function is a common function in mathematics used to determine the polarity of a number. It is usually represented as , and when is greater than zero, the result of is 1; when equals zero, the result of is 0; when is less than zero, the result of is −1.
Substituting (24) and (25) into (23), one yields
Based on formulas (16) and (17), the following results can be obtained
Substituting (27) into (26), one yields that
Step 3: In accordance to (18) and (19), the time derivatives of and are defined as follows
where and are known system parameters.
Construct the Lyapunov function for Step 3 as follows
Hence, is
The adaptive laws of , , and are designed as follows:
where Design and as follows
Theorem 1: For the UGV system (1), if controller (36) and (37), virtual controller (24) and (25), and parameter adaptive law (33) (34) and (35) are used, the overall control scheme ensures the following performance:
1) During operation, the constraints (9) and (10) must not be violated.
2) The formation tracking error is limited within the range of performance functions and .
3) The formation tracking error is limited within the range of performance functions and , respectively.
4) The control signals (36) and (37) are both uniformly bounded.
Therefore, the derivative of is as follows
The following inequalities hold
Applying the Lemma1 and Young’s inequality, the following inequalities can be obtained
where , , and are positive constant values.
Substituting inequalities (39)–(45) into (38), we can obtain
where is chosen as .
From the definition of in formula (31), the derivative form of can be obtained as follows:
where
and
Considering the boundedness of , it is clear that and are bounded, and are bounded from (5) and (6). Then, we will indicate that all signals are bounded in the controled system. The boundedness of guarantees that is bounded. Therefore, is bounded since the boundedness of and . is bounded due to the boundedness of , and . Thus is also bounded. We can conclude that , , , and are bounded. Therefore, the UGVs system is stable and all signals are bounded.
Simulation studies
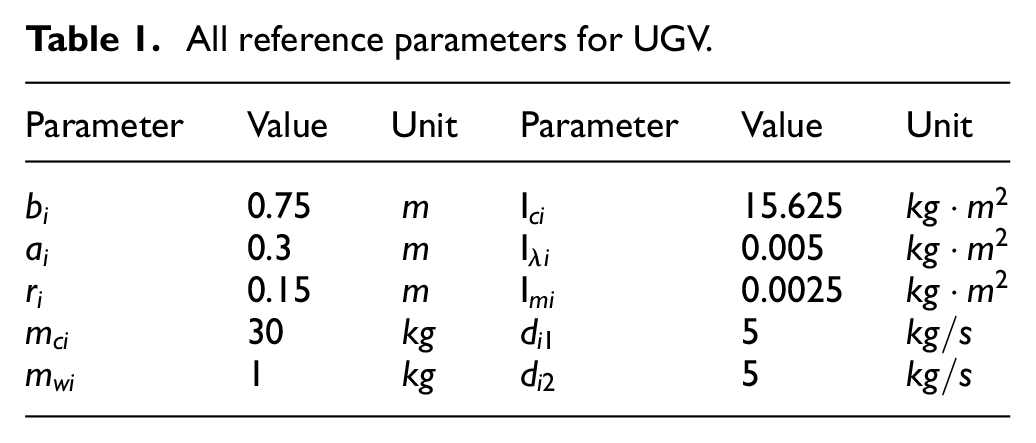
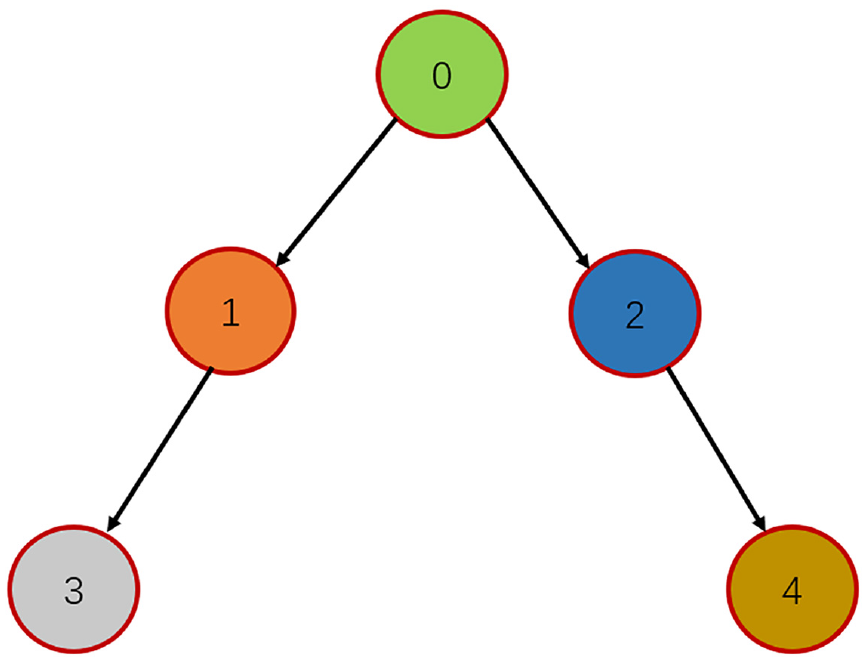
In this section, the initial preparation is to select four UGVs. All parameters are from reference,44 the specific content is shown in Table 1. Among them, directed topology structure graph of the multiple UGVs is shown in Figure 2.
All reference parameters for UGV.
Parameter
Value
Unit
Parameter
Value
Unit
0.75
15.625
0.3
0.005
0.15
0.0025
30
5
1
5
The multiple UGVs formation permutation graph.
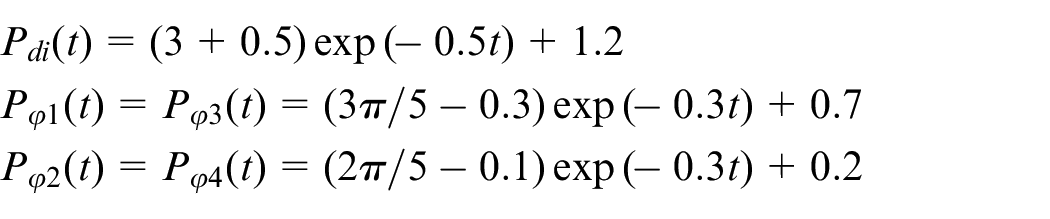
Firstly, the leader’s reference trajectory is designed to , . Other UGVs initial position information are provided
In addition, the desired distance m, the desired bearing angles
They can guarautee the steady-state and the transient performance of formation tracking errors and with the constraints (5) and (6). Where , and , , , and . The parameters are , . The parameters and matrix are , , , , the minimum value of collision avoidance distance , the maximum value of collision avoidance distance , the maximum angle for maintaining communication . The constraint functions are defined as:
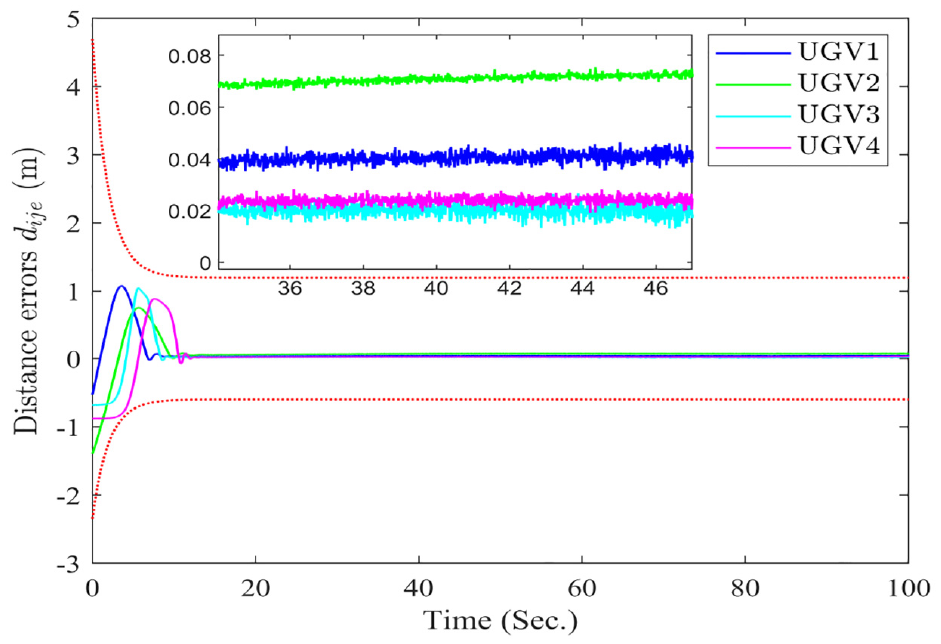
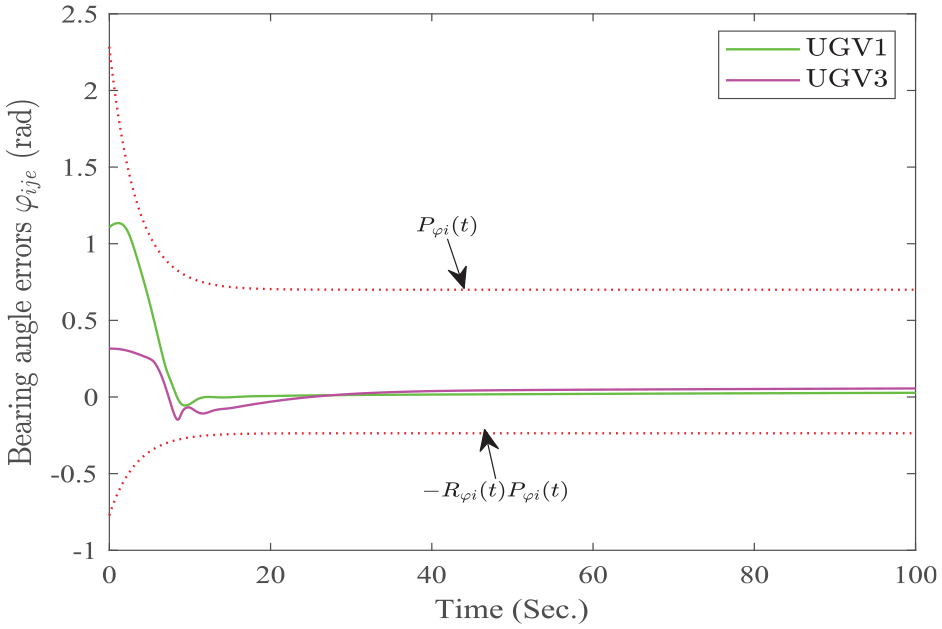
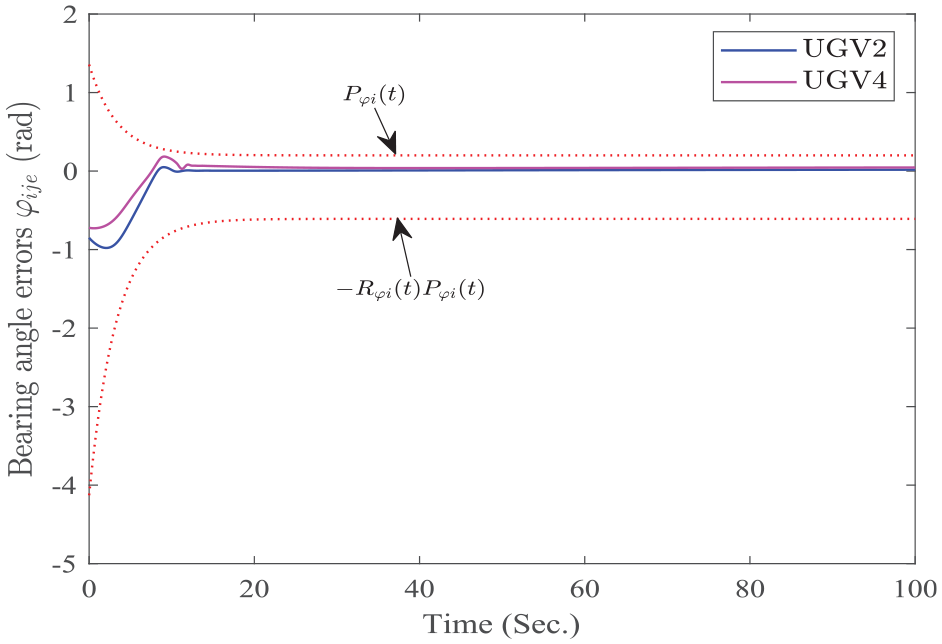
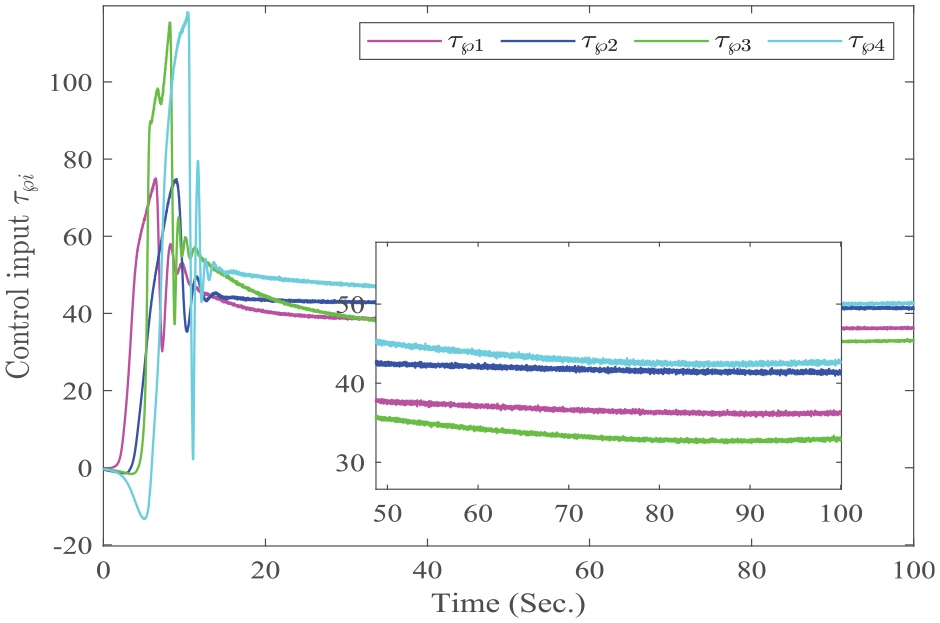
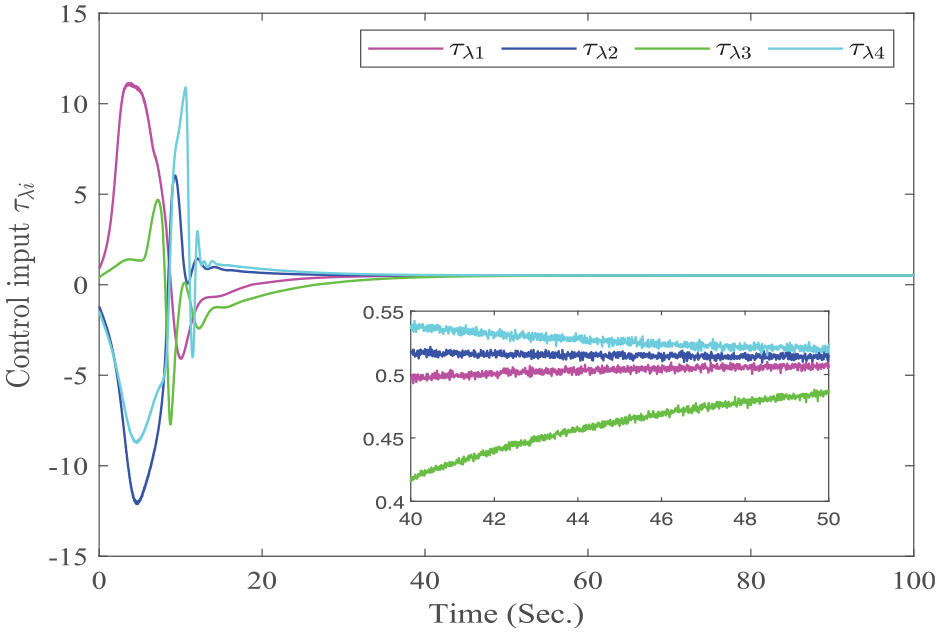
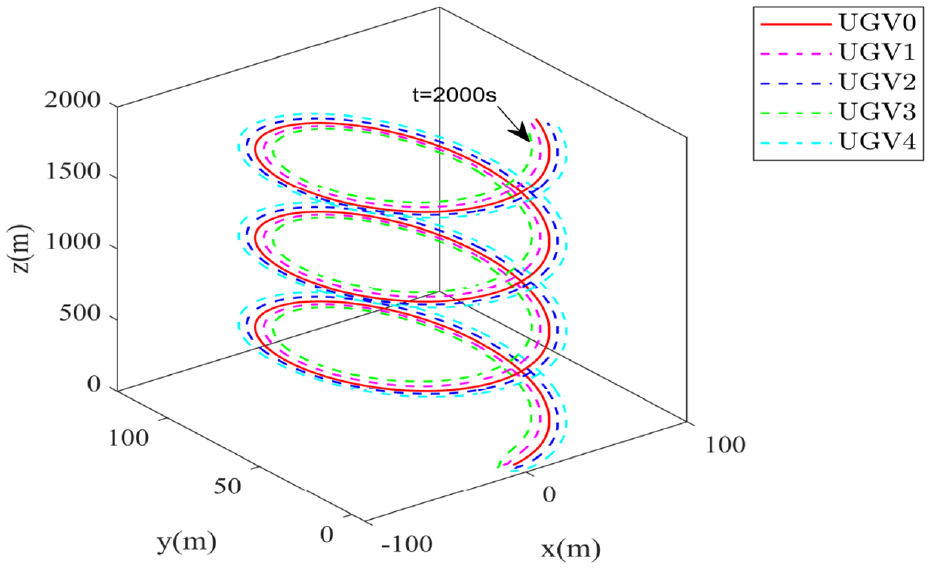
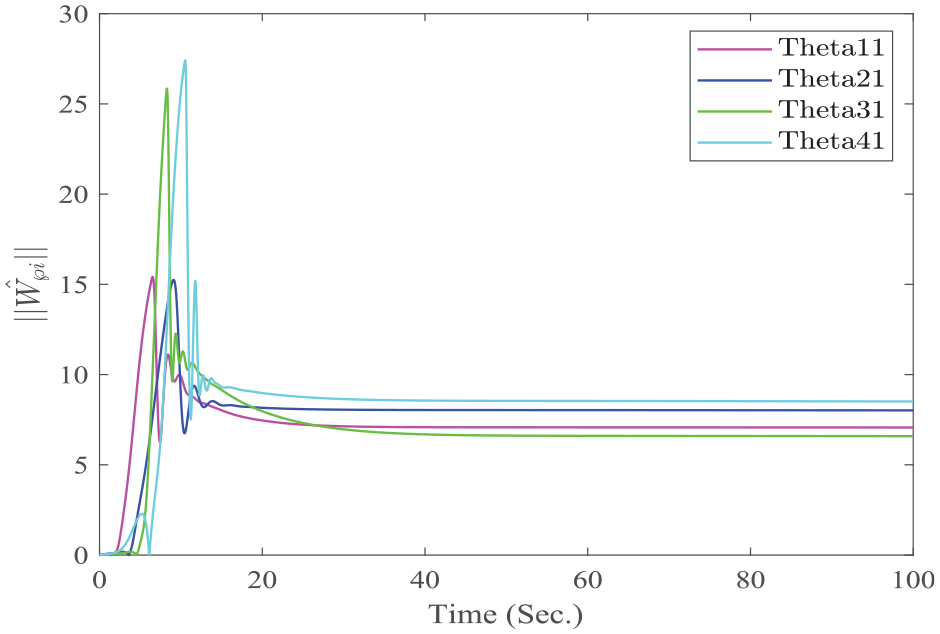
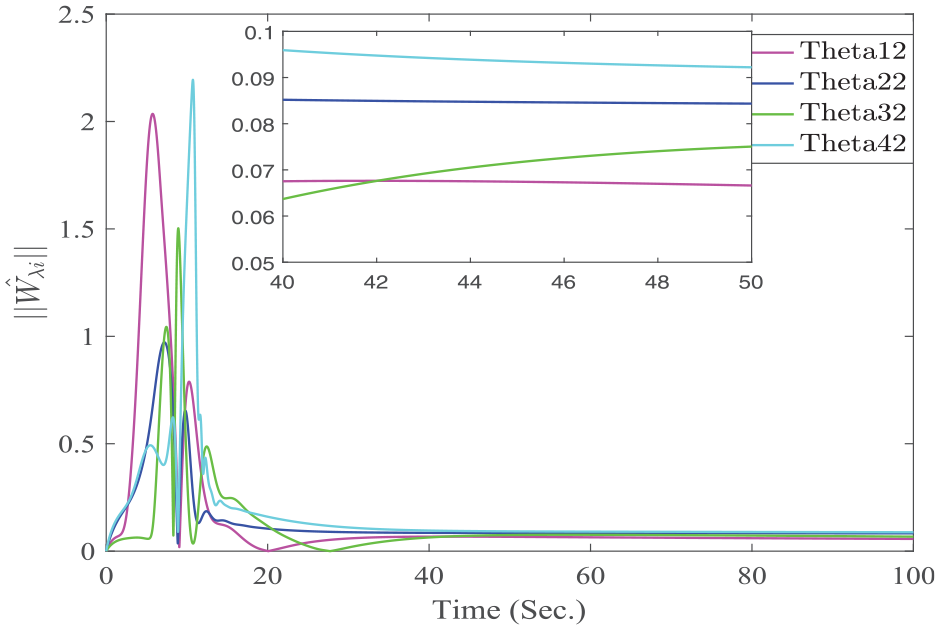
The signal-to-noise ratio of the white noise is 5. In Figure 3, the formation tracking error is limited within the range of performance functions and . Based on the formation topology, in Figures 4 and 5, the formation tracking error is limited within the range of performance functions and , respectively. The curves of the actual control signals for UGVs 1–4 are shown in Figures 6 and 7. Figure 8 shows the trajectory of the leader-follower formation of five UGVs at t = 2000 s. The curve plots of adaptive laws are demonstrated in Figures 9 and 10, respectively.
Conclusions
In this paper, we have considered the formation control issue of a group of multiple UGVs systems with different constraints, including performance and feasibility constraints. Thus, we have proposed a control framework to address the fuzzy adaptive finite-time formation control problem of a group of multiple UGVs systems. Meanwhile, in the adaptive backstepping technology, the adaptive formation controller combines the universal barrier Lyapunov functions to ensure that relative distance error and relative angle error converge to zero. Under all constraints, the exponential convergence speed of distance tracking error can be guaranteed.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported in part by National Natural Science Foundation of China under Grant U22A2043, in part by General Project of Liaoning Provincial Department of Education under Grant JYTQN2023224, and in part by Doctoral Startup Fund of Liaoning University of Technology under Grant XB2023025.
ORCID iD
Yongming Li
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.
References
1.
KuuttiSFallahSKatsarosK, et al. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J2018; 5(2): 829–846.
2.
MarzbaniHKhayyamHQuocV, et al. Autonomous vehicles: autodriver algorithm and vehicle dynamics. IEEE Trans Veh Technol2019; 68(4): 3201–3211.
3.
NiJHuJ.Dynamic modelling and experimental validation of a skid-steered vehicle in the pivotal steering condition. Proc IMechE, Part D: J Automobile Engineering2017; 231(2): 225–240.
4.
LiuJAnavattiSGarrattM, et al. Modified continuous ant colony optimisation for multiple unmanned ground vehicle path planning. Expert Syst Appl2022; 196: 116605.
5.
HoangVDHern··¢ndezDCHariyonoJ, et al. Global path planning for unmanned ground vehicle based on road map images. In: IEEE 2014 7th international conference on human system interactions (HSI), Costa da Caparica, Portugal, 2014, pp.82–87.
6.
ZhouXYuXZhangY, et al. Trajectory planning and tracking strategy applied to an unmanned ground vehicle in the presence of obstacles. IEEE Trans Autom Sci Eng2020; 18(4): 1575–1589.
7.
LvJQuCDuS, et al. Research on obstacle avoidance algorithm for unmanned ground vehicle based on multi-sensor information fusion. Math Biosci Eng2021; 18(2): 1022–1039.
8.
LiangXChenGZhaoS.Moving target tracking method for unmanned aerial vehicle/unmanned ground vehicle heterogeneous system based on AprilTags. Meas Control2020; 53(3–4): 427–440.
9.
QiuBWangGFanY.Trajectory linearization-based robust course keeping control of unmanned surface vehicle with disturbances and input saturation. ISA Trans2021; 112: 168–175.
10.
WangYGoilaAShettyR, et al. Obstacle avoidance strategy and implementation for unmanned ground vehicle using LIDAR. SAE Int J Commer Veh2017; 10: 50–55.
11.
WangHZuoZWangY, et al. Composite nonlinear extended state observer and its application to unmanned ground vehicles. Control Eng Pract2021; 109: 104731.
12.
LiBOuyangYLiL, et al. Autonomous driving on curvy roads without reliance on frenet frame: a cartesian-based trajectory planning method. IEEE Trans Intell Transp Syst2022; 23(9): 15729–15741.
13.
LiXSunZCaoD, et al. Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles. Mech Syst Signal Process2017; 87: 118–137.
14.
MaxGLantosB. Adaptive formation control of autonomous ground vehicles in leader-follower structure. In: 2016 IEEE 17th international symposium on computational intelligence and informatics (CINTI), Budapest, Hungary, 2016, pp.000013–000018..
15.
GaoZZhangYGuoG.Fixed-time leader-following formation control of fully-actuated underwater vehicles without velocity measurements. J Syst Sci Complex2020; 33(11): 2972–2988.
16.
QiWJiZJLiuYG.Strong structural controllability based on leader-follower framework. J Syst Sci Complex2021; 31(6): 2110–2125.
17.
SayabMAerdenDPaananenM, et al. Virtual structural analysis of Jokisivu open pit using structure from motion unmanned aerial vehicles (UAV) photogrammetry: implications for structurally-controlled gold deposits in southwest Finland. Remote Sens2018; 10(8): 1296.
18.
SunYYangHMengF.Research on an intelligent behavior evaluation system for unmanned ground vehicles. Energies2018; 11(7): 1764.
19.
OjhaUChowMY. Behavioral control based adaptive bandwidth allocation in a system of unmanned ground vehicles. In: IECON 2010-36th annual conference on IEEE industrial electronics society, Glendale, AZ, 2010, pp.3123–3128.
20.
De QueirozMCaiXFeemsterM. Formation control of multi-agent systems: a graph rigidity approach. John Wiley Sons, Hoboken, New Jersey, 2019.
21.
LiuQLiuRWangZ, et al. UAV swarm enabled localization in isolated region: a rigidity-constrained deployment perspective. IEEE Wirel Commun Lett2021; 10(9): 2032–2036.
22.
WangXYadavVBalakrishnanSN.Cooperative UAV formation flying with obstacle/collision avoidance. IEEE Trans Control Syst Technol2007; 15(4): 672–679.
23.
MastelloneSStipanovicDMGraunkeCR, et al. Formation control and collision avoidance for multi agent non-holonomic systems: theory and experiments. Int J Rob Res2008; 27(1): 107–126.
24.
FranchiAStegagnoPOrioloG.Decentralized multi robot encirclement of a 3D target with guaranteed collision avoidance. Auton Robot2016; 40: 245–265.
25.
NascimentoTPConceicaoAGSMoreiraAP.Multi robot nonlinear model predictive formation control: the obstacle avoidance problem. Robotica2016; 34(3): 549–567.
26.
YamchiMHEsfanjaniRM.Formation control of networked mobile robots with guaranteed obstacle and collision avoidance. Robotica2017; 35(6): 1365–1377.
27.
JinX.Fault tolerant finite time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica2016; 68: 228–236.
28.
GhommamJSaadM.Adaptive leader follower formation control of underactuated surface vessels under asymmetric range and bearing constraints. IEEE Trans Veh Technol2017; 67(2): 852–865.
29.
JinX.Nonrepetitive leader follower formation tracking for multiagent systems with LOS range and angle constraints using iterative learning control. IEEE Trans Cybern2018; 49(5): 1748–1758.
30.
DaiSLHeSWangM.Adaptive neural control of underactuated surface vessels with prescribed performance guarantees. IEEE Trans Neural Netw Learn Syst2018; 30(12): 3686–3698.
31.
LiHWangJHeS, et al. Nonlinear optimal impact-angle-constrained guidance with large initial heading error. J Guid Control Dyn2021; 44(9): 1663–1676.
32.
RusdinarAKimSS.Modeling of vision based robot formation control using fuzzy logic controller and extended Kalman filter. Int J Fuzzy Log Intell Syst2012; 12(3): 238–244.
33.
LiYZhangJTongS.Fuzzy adaptive optimized leader following formation control for second order stochastic multiagent systems. IEEE Trans Industr Inform2021; 18(9): 6026–6037.
34.
LiKLiY.Adaptive neural network finite time dynamic surface control for nonlinear systems. IEEE Trans Neural Netw Learn Syst2020; 32(12): 5688–5697.
35.
ZhaiJ.Adaptive finite-time control for a class of p-normal nonlinear systems. IEEE Trans Circuits Syste II Express Briefs2022; 70(2): 705–709.
36.
WangHXuKZhangH.Adaptive finite time tracking control of nonlinear systems with dynamics uncertainties. IEEE Trans Automat Contr2022; 68(9): 5737–5744.
37.
HuangYLiuWLiB, et al. Finite-time formation tracking control with collision avoidance for quadrotor UAVs. J Franklin Inst2020; 357(7): 4034–4058.
38.
ShouYXuBLuH, et al. Finite-time formation control and obstacle avoidance of multi-agent system with application. Int J Robust Nonlinear Control2022; 32(5): 2883–2901.
39.
WangLSunWSuSF, et al. Adaptive prescribed performance asymptotic tracking control for nonlinear systems with time-varying parameters. Int J Robust Nonlinear Control2022; 32(7): 4535–4552.
40.
SunWSuSFXiaJ, et al. Command filter-based adaptive prescribed performance tracking control for stochastic uncertain nonlinear systems. IEEE Trans Syst Man Cybern Syst2020; 51(10): 6555–6563.
41.
HaddadMBoulkrouneALiH.Practical finite-time fuzzy control of uncertain nonstrict-feedback systems with actuator saturation and output constraints. Int J Adapt Control Signal Process2024; 38(5): 1829–1853.
42.
ParkBSYooSJ.Connectivity maintaining and collision avoiding performance function approach for robust leader follower formation control of multiple uncertain underactuated surface vessels. Automatica2021; 127: 109501.
43.
DaiSLHeSChenX, et al. Adaptive leader follower formation control of nonholonomic mobile robots with prescribed transient and steady state performance. IEEE Trans Industr Inform2019; 16(6): 3662–3671.
44.
CheeinFAScagliaG.Trajectory tracking controller design for unmanned vehicles: a new methodology. J Field Robot2014; 31(6): 861–887.
45.
DaiSLLuKFuJ.Adaptive finite time tracking control of nonholonomic multirobot formation systems with limited field of view sensors. IEEE Trans Cybern2021; 52(10): 10695–10708.