
Abstract
This study proposes an effective solution to the problem of attitude control for a rigid body satisfying angular velocity constraint as well as providing fault-tolerant capability. More specifically, a finite-time sliding surface containing attitude quaternion and angular velocity is first defined. Then, a novel tan-type prescribed performance control (PPC) with simple structure is presented to confine the sliding surface within a predefined performance boundary. Not only the attitude quaternion and angular velocity are indirectly constrained, but also it is thoroughly proved that the rotation velocity constraint is met even when severe actuators faults occur. The closed-loop attitude system is confirmed to be finite-time stable in the sense of Lyapunov stability. Numerical simulations clearly illustrate the effectiveness and usefulness of the suggested finite-time PPC despite actuator faults and environmental disturbances.
Keywords
Introduction
Despite extensive research, including linear or nonlinear control, conducted on rigid body attitude stabilization on rotational sphere, it is still an open interesting problem. Spacecraft, aerial and underwater systems are known as the most important applications of the aforementioned issue. The attitude maneuver should be accomplished as fast and accurate as possible even if there are external disturbances, sensor saturation limit and actuator faults. Whereas numerous approaches such as disturbance observer-based control, 1 output feedback, 2 inverse optimal control, 3 adaptive control, 4 variable structure control, 5 and H∞ control 6 have been developed for rigid body attitude control system, a typical property of these works is that they are on the basis of the assumption that the system components do not experience any fault or failure. In common practice, this assumption is not always met and needs to be relaxed.
Reliability plays a vital role in rigid body attitude control systems. Lack of ability to cope with unexpected faults can result in substantial performance degradation or even system instability emphasizing its critical importance especially in practical applications. 7 Cai et al. 8 presented a robust attitude control incorporating an adaptive mechanism to compensate for the adverse influence of the faults with restricted thrusts. A unique advantage of this work is to reduce computation burden which is of crucial importance in practical applications. Employing variable structure control, an adaptive rigid spacecraft attitude control has been presented so as to accommodate actuators fault with limited control torque while the closed-loop system performance is improved. 9 Shen et al. 10 proposed several fault-tolerant attitude controls ensuring finite-time convergence under the influence of the system uncertainty, external disturbance, and actuators saturations and fault.
In addition to actuators fault, the limitation of rotation velocity measurement is also of importance in practical rigid body attitude control systems. Because of limited capability of low-rate gyro, 11 the rotation velocity is required to be maintained within a specific range of operation. Accounting for angular velocity saturation limit, an optimal PID-like control has been proposed, 12 however, it is quite complicated to tune the control parameters. A sliding mode control algorithm has been developed to meet angular velocity constraint. 13 To deal with quick reorientation a spacecraft subject to the physical limitations, an efficient control algorithm for the spacecraft eigenaxis rotations with physically limitations on the sensors and actuators has been developed. 14 Using a hyperbolic tangent function as a virtual control in backstepping method, an attitude control was introduced for a rigid spacecraft in which the rotation velocity violation of its maximum limit is avoided. 15 With the use of backstepping approach and barrier Lyapunov function, an attitude control has been presented in which the rotation velocity is kept in a given operation domain. 16 Considering actuators saturation and angular velocity constraint, a cascade PD control of rigid spacecraft has been given. 17 The main drawback of the aforementioned studies is that they are not able to cope with angular velocity constraint and actuators fault simultaneously.
While performing specific tasks, the attitude control system should achieve desirable transient and steady-state performance. Practically, providing transient performance for the attitude and rotation velocity is tough to be included in the design procedure. The well-known Prescribed Performance Control (denoted by PPC) 18 is able to systematically attain the prescribed performance through making convergence time, overshoot, and steady-state error meet the desired performance requirements. To do this, it employs a PPF and a transformation function for transforming the open-loop dynamics into an equivalent unconstrained one. It is guaranteed that robust stabilization of the unconstrained system results in the error variable evolves within the prescribed boundaries. Thus, the main objective of the control system designer would be to develop an appropriate control framework to stabilize the unconstrained system regardless of any constraint imposed on the specific variable. This, in turn, considerably reduces the complexity of the design procedure. Despite significant progress made on the field of PPC, it is still a challenging issue how to provide predefined performance under the influence of the sensor limitation and actuator fault.
For the purpose of providing predefined performance for both the attitude quaternion as well as rotation velocity in transient and steady state phases, a finite-time convergent attitude control scheme for a rigid body is proposed. The primary contributions of the current study are briefly outlined as: (a) an adaptive nonsingular PPC for rigid body attitude system is presented to confine the sliding surface within a specific envelope. It is proved that the rotation velocity does not go beyond the maximum limit if initial condition of the sliding surface is less than the PPF. (b) Compared to the complicated PPCs,19,20 a simple structure tan-type PPC is proposed to indirectly include the specific performance requirements for both the attitude quaternion and rotation velocity through constraining the sliding surface. A unique property of the proposed framework is that the controller does not contain complicated functions and partial derivative terms which significantly decreases the control structure complexity. (c) The finite-time convergence of closed-loop system is ensured even if sensor limitation and actuator fault are simultaneously taken into account.
The rest of the study is presented as follows: the subsequent section explains a rigid body nonlinear model and the challenging issue of attitude control. The principal results are given in section “Main results” in which a finite-time convergent PPC algorithm is designed to acquire highly accurate attitude control. Eventually, numerical simulation and concluding remarks are provided in sections “Simulation results” and “Conclusion,” respectively.
Background and preliminaries
Definition and lemma
Definition 121: Consider a nonlinear system as

where T is the finite time convergence time.
Lemma 122: Consider the system
Mathematical model of a rigid body
The attitude kinematics and dynamics for a rigid body are presented by the following differential equations 23

where
In practice, two kinds of actuator faults are usually taken into account: the additive fault denoted by

where

where
Remark 1: Here, we suppose that the system under investigation is completely actuated implying that the number of degree-of-freedom is the same as the number of reaction wheels. For the case of a reaction wheel completely fails, that is,
Control objective
The main goal of the research is to develop a finite-time PPC ensuring fault tolerant capability of a rigid body attitude system while the following control goals are achieved:
A1. The quick attitude maneuver is accomplished during a finite time while all of the signals are bounded.
A2. The sliding manifold is constrained and the rotation velocity constraint is not violated.
Main results
Sliding surface and prescribed performance function
To streamline the design procedure, the following sliding surface containing attitude quaternion and rotation velocity guaranteeing finite-time convergence is defined

where

where
Remark 2: In the sliding surface (5), the singularity problem is successfully addressed through switching from the terminal to general sliding surface. Moreover, the parameters
A PPF is defined to keep the sliding surface within a predefined bound given by

Definition 2. The function
By virtue of such PPF, the favorable time-domain properties for the sliding vector including rise time, overshoot, and ultimate bound for error are straightforward to be acquired in advance. The positive and deceasing function (8) is extensively utilized as the PPF.

where
Remark 3: According to the condition (7), one can easily infer that if
Remark 4: The angular velocity constraint, that is,
Prescribed performance attitude control design
In this section, to meet condition (7) for all the time, a novel tan-type PPC with simple structure for the rigid body attitude system (4) is presented to confine the sliding surface within a predefined performance boundary. Not only the attitude quaternion and angular velocity are indirectly constrained, but also it is thoroughly proved that the rotation velocity constraint is met even when the actuators experience sever faults.
Differentiating the sliding surface (5) along with (4), one obtains

where
For the purpose of accomplishing the attitude maneuver guaranteeing appropriate control accuracy, an adaptive finite-time prescribed performance attitude control law is introduced as

in which

where
Remark 5: When
Theorem 1. For the rigid body attitude system with dynamics equations (4), if the sliding manifold is suggested by (5) and the finite-time attitude control scheme is taken as (11), then (a) the system trajectory is stable in the sense of finite-time stability concept, (b) the sliding vector evolves into predefined performance envelopes expressed by (8), and (c) the angular velocity constraint is satisfied.
Proof. To prove Theorem 1, two steps are followed. Firstly, it is shown that
Step 1. Consider the following candidate Lyapunov function

where
Substituting finite-time attitude control scheme (11) into (14), one has
It is worth mentioning that since

For any
For

in which the smallest and largest eigenvalue of matrix
where
Step 2. In what follows, we demonstrate that trajectory of attitude system (9) is practically finite time stable. To this end, the inequality (16) is rewritten as
where

Thus, the inequality (18) can be simplified as

where

From (21), it is observed that

If

By virtue of the proof in, 28 the quaternion and rotation velocity will converge to desirable sets around the zero within finite time.
Simulation results
This part is devoted to carrying out some numerical simulations for a rigid spacecraft so as to verify the usefulness of the suggested methodology. The inertia matrix of the considered spacecraft is
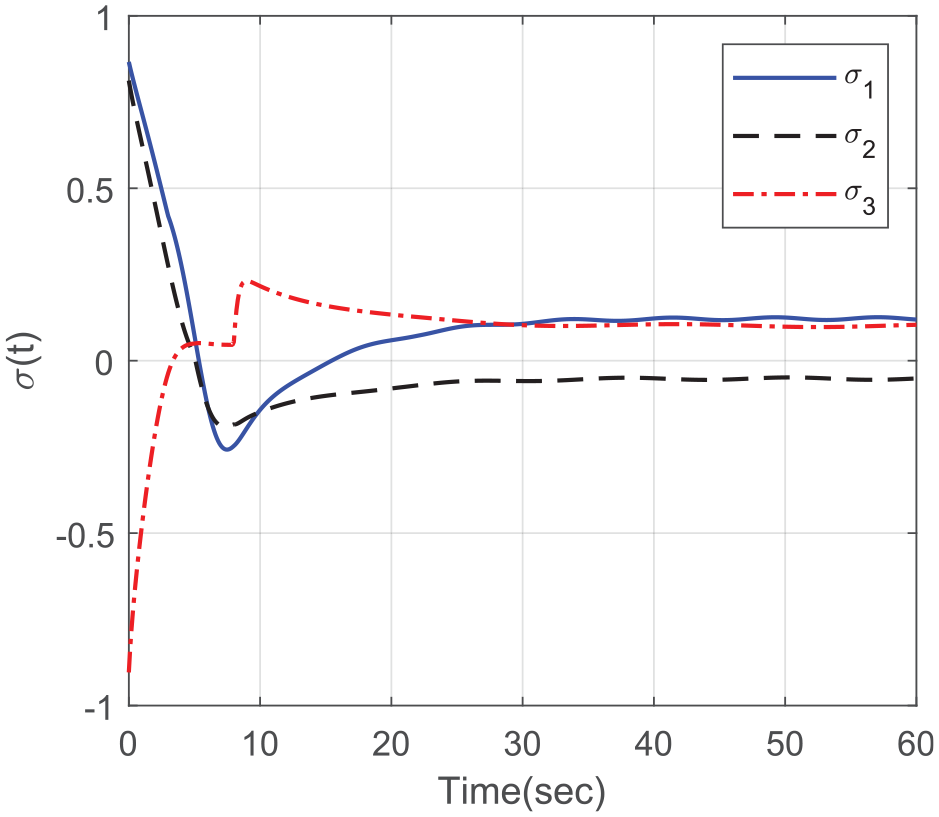
The results are given in Figures 1 to 7 verifying the analysis provided in section “Main results” well. Based on Figures 1(a) and 2(a), although both of the control laws provide finite-time convergence, the suggested controller acquires considerably faster convergence rate compared to the NTSMC even when the actuators faults are considered. To put it differently, the settling time under the controller (11) is roughly 28 s, while the NTSMC needs about 38 s to achieve system stabilization. This means that the proposed controller improves the convergence speed about 26.3%. From Figures 1(b) and 2(b), it is observed that the proposed controller results in better pointing accuracy. Figures 3 and 4 depict the transient and steady-state behavior of the angular velocity. Obviously, the constraint on the rotation velocity is satisfied; however, the proposed controller possesses superior performance both in transient and steady state. As it is seen in Figure 5, the maximum control torque required by the new controller is less than that of the NTSMC which is crucial in practice. From Figure 6, it is inferred that the sliding surface utilizing the novel controller is kept in the predefined boundary and, consequently, the angular velocity constraint is not violated, as it is expected from the analysis. Figure 7 illustrates the transformed sliding surface. It is always less than 1 showing that the sliding surface never contacts the predefined performance boundary. When it tends to predefined performance boundary owing to severe actuator fault or unexpected disturbance, the control torque is increased to prevent the sliding surface from its continuity, as it was rigorously analyzed in the preceding section.
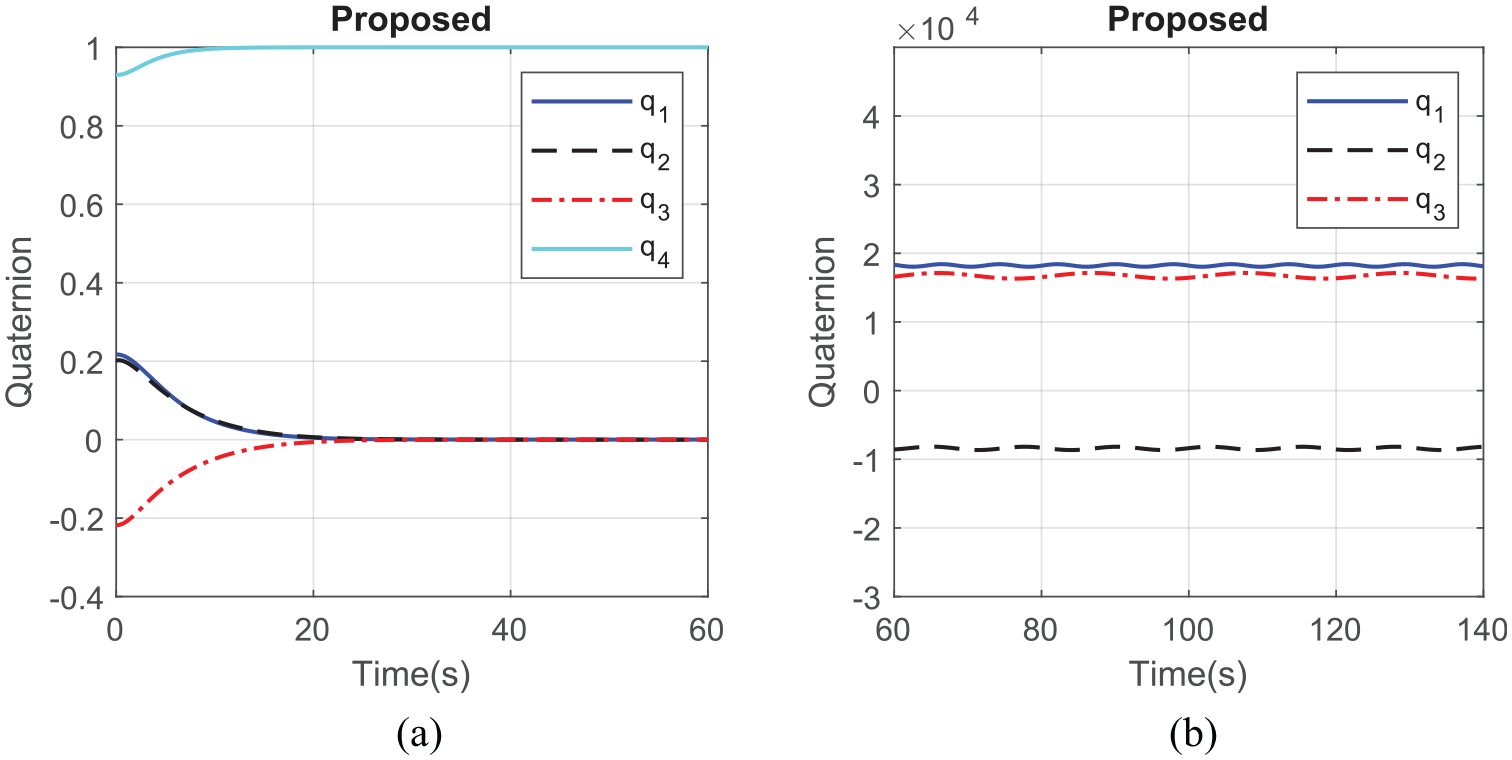
Time response of attitude quaternion using the proposed control. (a) Initial response. (b) Steady-state error.
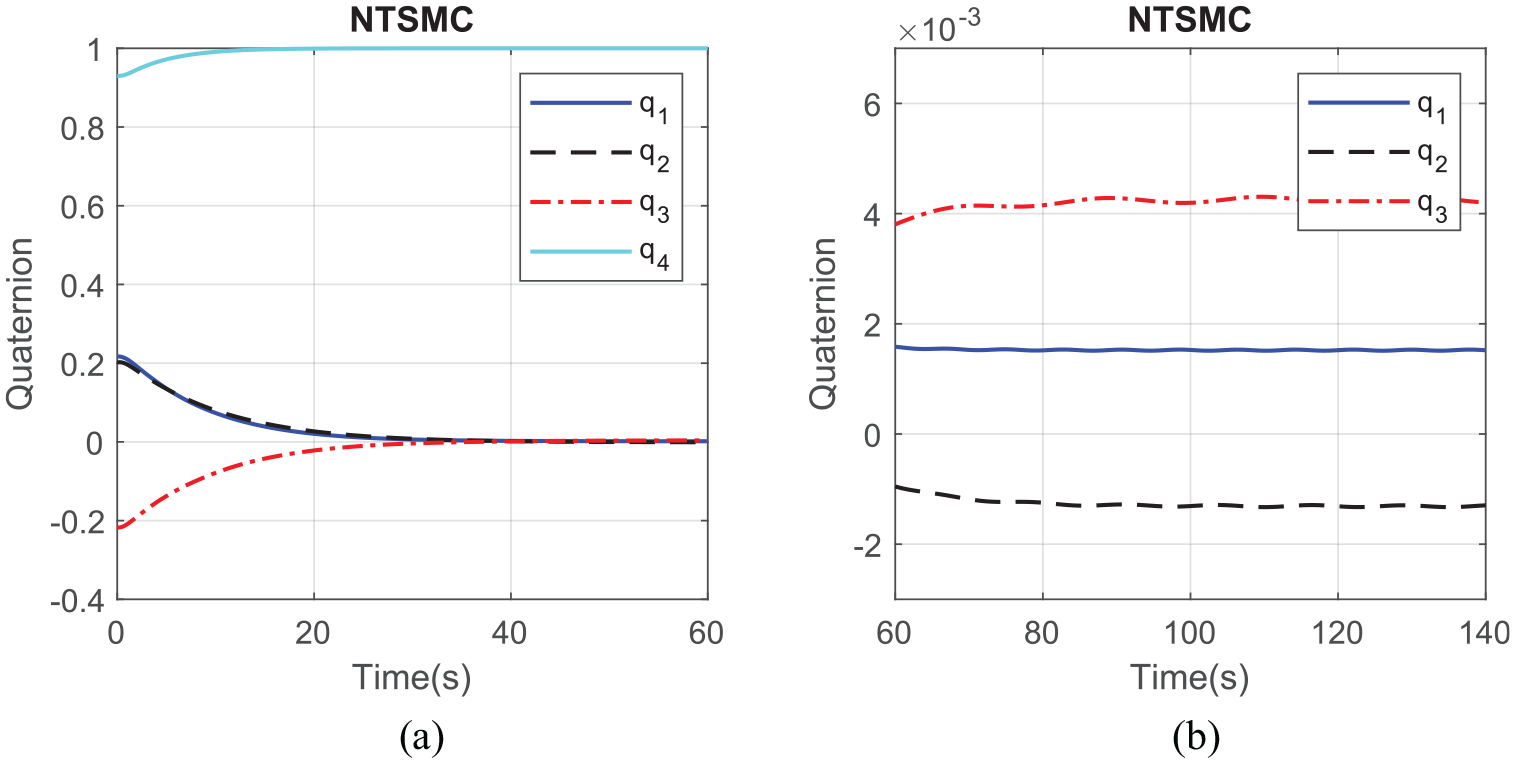
Time response of attitude quaternion using NTSMC. (a) Initial response. (b) Steady-state error.
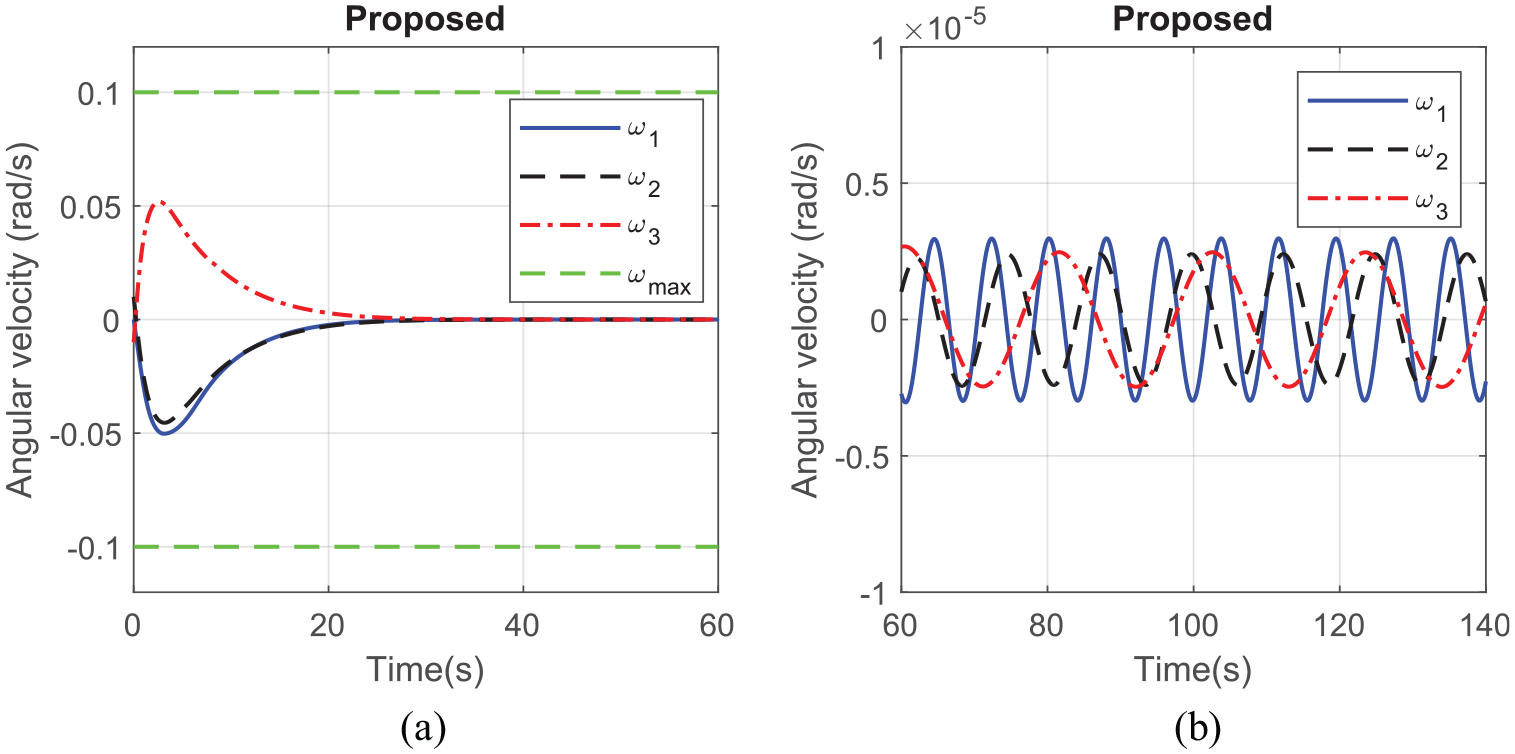
Time response of rotation velocity using the proposed control. (a) Initial response. (b) Steady-state error.
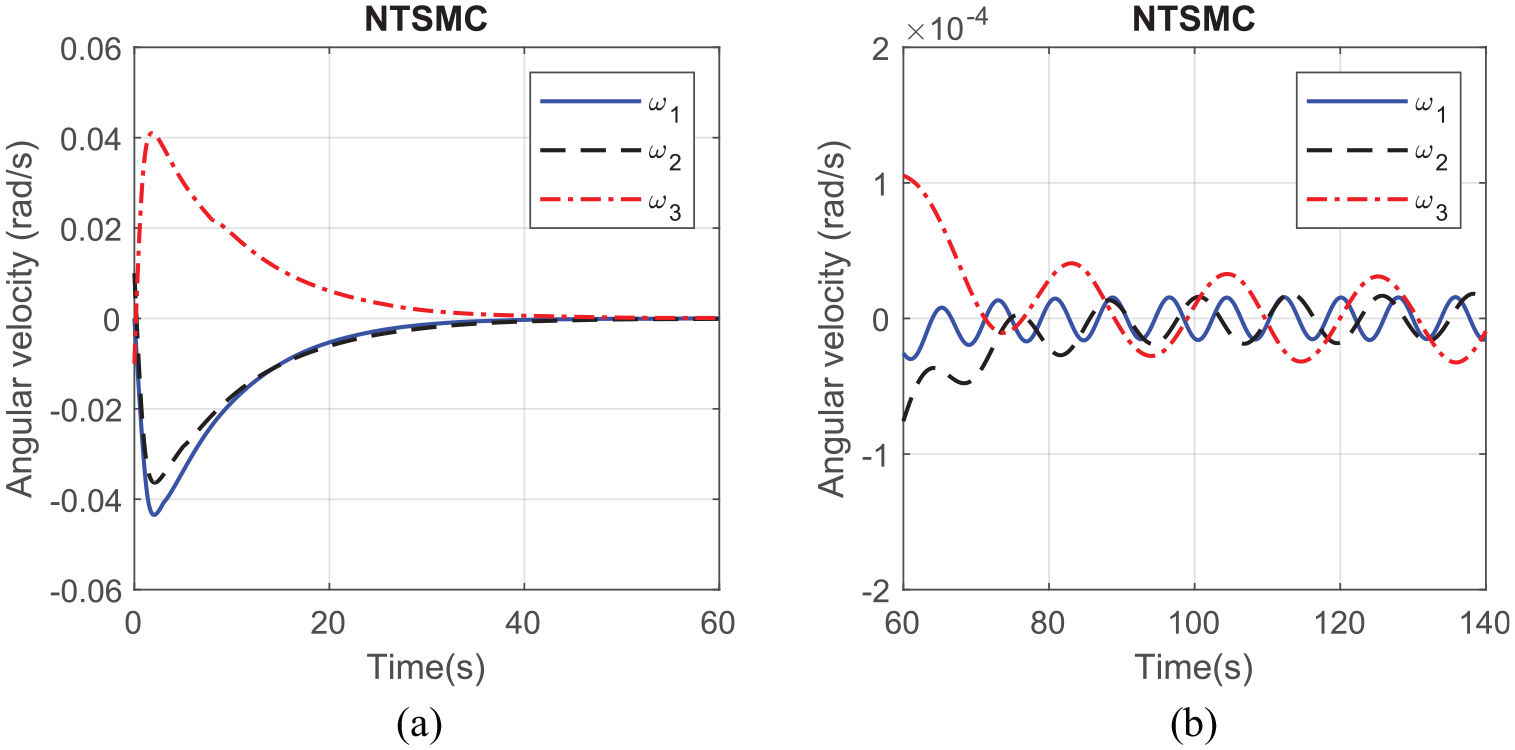
Time response of rotation velocity using NTSMC. (a) Initial response. (b) Steady-state error.
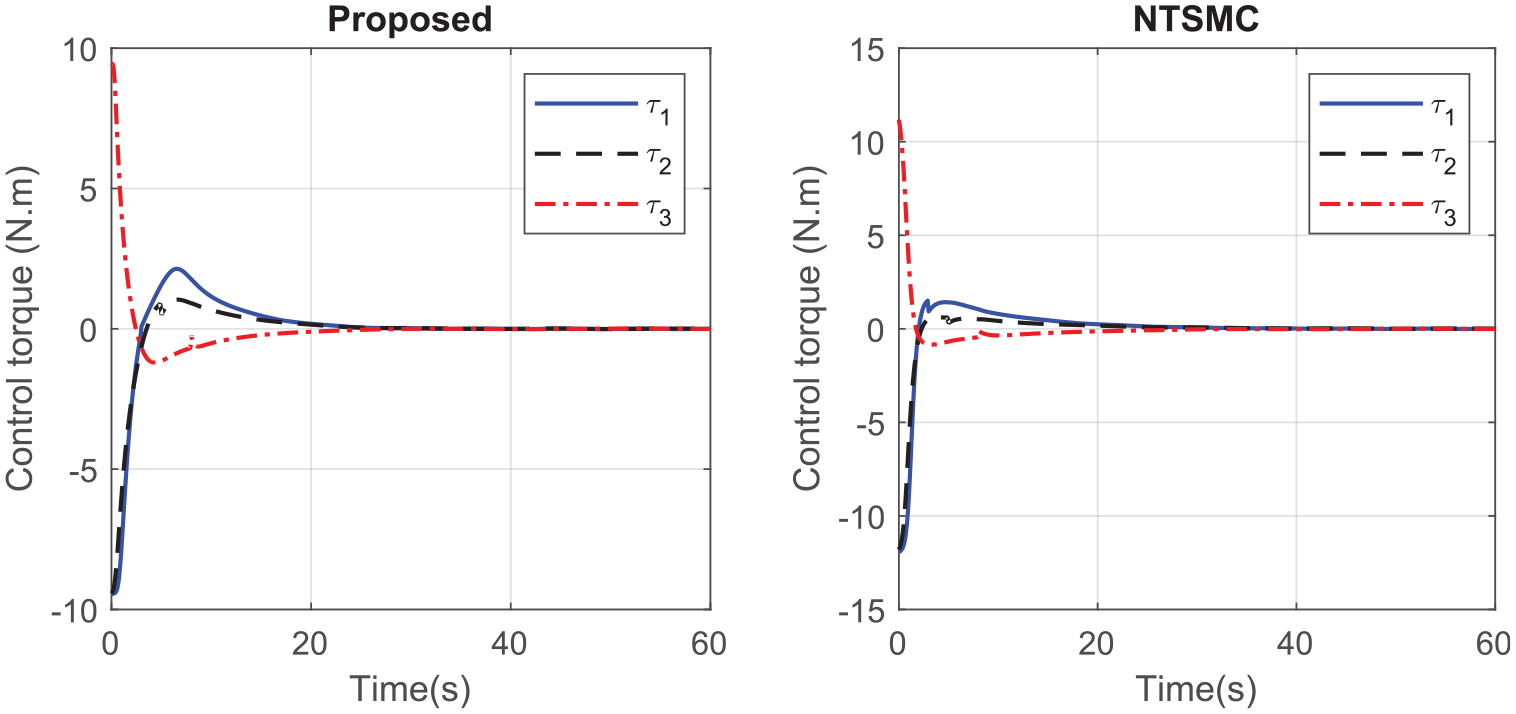
Time response of the control torques.
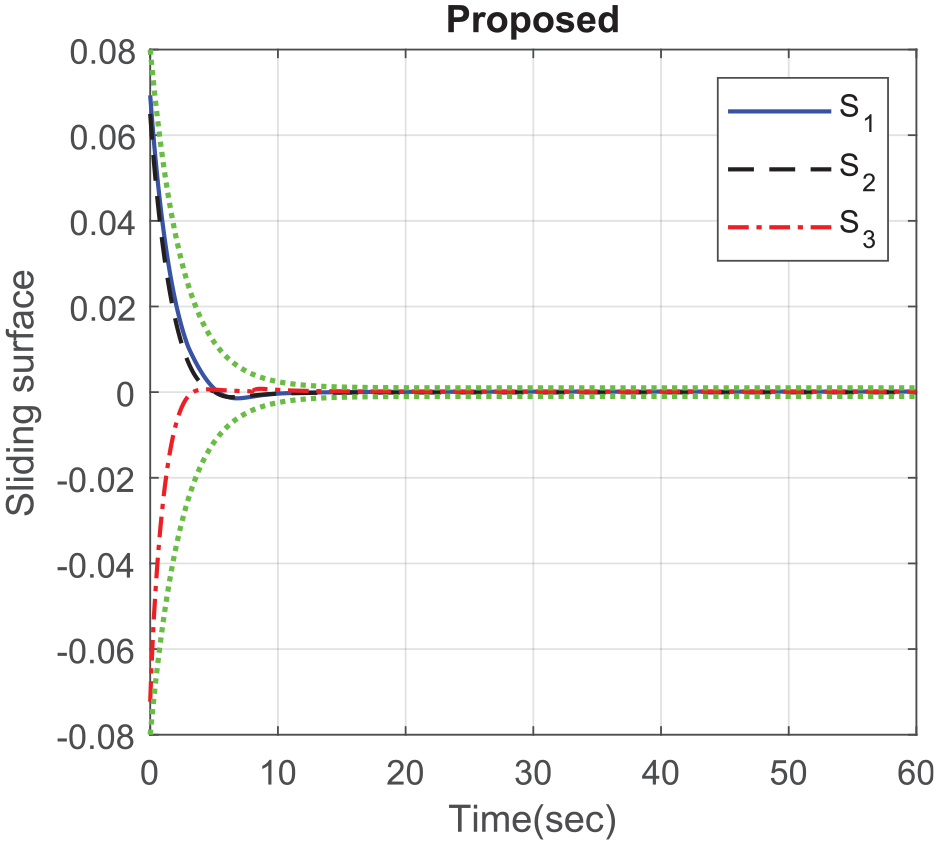
Time response of the sliding surface.
Time response of transformed sliding surface.
Based upon the obtained results, it is straightforward to conclude that the new control framework solves the finite-time PPC issue for a rigid spacecraft under the influence of reaction wheel faults and unexpected disturbance. The figures clearly illustrate that the suggested scheme has gained superior control performance in comparison with NTSMC.
Conclusion
This article investigates the issue of designing a finite-time adaptive prescribed performance attitude control for a rigid body. To meet the rotation velocity constraint, a novel PPC guaranteeing finite-time convergence is developed to constrain the sliding surface which is composed of the attitude quaternion and rotation velocity. It is mathematically confirmed that attitude quaternion as well as rotation velocity are indirectly constrained and the rotation velocity constraint is met as long as the finite-time sliding surface is confined within the specific boundary. The controller possesses simple structure as it does not contain complicated functions and partial derivative terms which significantly decreases the control structure complexity. Because the upper bound of total uncertainty is not known, an adaptive law is presented to assure that all of the signals in the closed-loop system are UUB. As one of the future works, actuator constraint should be explicitly addressed in the attitude controller design.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.