
Abstract
Quadrotor unmanned aerial vehicles (UAVs) operating in agricultural fields for aerial photography are susceptible to external disturbances. The disturbances result in trajectory deviation and irregular image overlapping that considerably degrade image quality. Disturbance observers (DOs) are commonly researched for counteracting these effects but may have delays and limitations in handling diverse and high-frequency disturbances. To this end, this work proposes a continuous high-order sliding mode-assisted DO (HSMDO) with limited time convergence characteristics for the estimation of disturbances in systems. The observer consists of a classical nonlinear DO (NDO) and a sliding mode-assisted system (SMAS). The NDO is used to estimate disturbances preliminarily. The SMAS is utilised to assist the NDO in estimating the high-frequency component of disturbances and ensure that the entire DO is finite-time convergent. Finally, the tracking controller is designed on the basis of the HSMDO, which enables UAVs to track the prescribed trajectories under disturbances stably. Simulation results show that the proposed HSMDO can accurately estimate various types of disturbances. Moreover, the tracking controller based on the HSMDO can improve the antidisturbance performance of systems and ensure the trajectory tracking accuracy of UAVs.
Introduction
The development of quadrotor unmanned aerial vehicles (UAVs) has made remarkable progress over the past few decades. 1 UAVs are favoured for their low cost, small size, light weight, flexibility, landing capabilities, enhanced payload capacity and ability to operate in harsh environments. 2 In recent years, UAVs have gradually demonstrated their potential for collecting environmental information in farmlands through crop pest and disease monitoring, soil analysis and field pollution surveillance.3–5 However, when drones are used for photography tasks in farmland environments, they often encounter external disturbances, such as variations in wind velocity and fluctuations in loads. These disturbances can result in problems, such as route deviation and image overlapping, that considerably reduce the quality of images and integrity of collected data. 6 Therefore, addressing the challenge of maintaining flight trajectory stability, improving image quality and ensuring data accuracy in the presence of interference is crucial.
Quadrotor UAVs are systems with six outputs (position and attitude) but only four inputs for control, making them under-actuated systems. 7 They also possess complex dynamics, high nonlinearity, strong coupling and sensitivity to interference. Therefore, designing reliable and robust controllers for quadrotor UAV systems is a formidable task from a theoretical and technological standpoint.
Several advanced control techniques have been developed for the trajectory tracking problem of quadrotor UAVs. They include proportional integral differential control (PID), 8 robust control, 9 feedback linearisation,10,11 sliding mode control (SMC),12–15 backstepping control (BC).16–19 However, some of these methods lack robustness against disturbances, and others often demonstrate robustness at the cost of compromised control performance such as robust control’s conservatism and high frequency chattering of SMC. 20
The disturbance observers (DOs) of closed-loop systems are widely studied. They include nonlinear DOs (NDOs), 21 extended state observers (ESOs), 22 and sliding mode observers (SMOs). 23 Research shows that DOs are helpful for addressing the external disturbances and plant uncertainties of UAV systems. In previous works,24,25 NDOs are employed alongside controllers to enhance the robustness of quadrotor UAV systems and specific tracking controllers are designed on the basis of the estimates from a given observer to achieve good tracking performance. In another research, 26 an ESO is constructed to estimate the unmeasurable velocity states and lumped disturbances in dynamics. A robust dynamic surface flight controller is then fabricated to ensure the asymptotic tracking of a system in the presence of lumped disturbances. In other studies,27–29 SMO is introduced to estimate lumped disturbances in systems, and the estimated information of SMO is introduced into the input terminal. Moreover, controllers are designed to control UAVs. In other investigations,30–32 finite-time DOs are designed to cope with external disturbances in UAV systems. Subsequently, a nonsingular terminal SMC scheme is proposed. This scheme ensures that the tracking error of the UAV converges to zero within a finite time. However, dynamic estimation by traditional DOs is not instantaneous, resulting in a certain gap between the estimated and actual values of disturbance. Although this difference is not obvious when estimating and compensating for low-frequency disturbances, the introduction of traditional DOs cannot reduce tracking errors when high-frequency disturbances exist in the system.33,34
The sliding mode-assisted DO (SMDO) concept proposed by Tian et al. 35 is an effective method for the accurate and rapid estimation of high-frequency disturbances. SMDO consists of a traditional DO and sliding mode-assisted system (SMAS). The DO transforms the estimation error into a small bounded set. The control law outputted by SMAS then eliminates the residual of the DO within the estimator’s inner loop. In a previously reported investigation, 36 SMDO is applied to a flight simulator. The simulation results show that the SMDO-based controller is more robust than traditional DO-based angle tracking. However, given that the essence of SMAS is SMC, undesired chattering can lead to serious issues, such as vibration in the mechanical parts of quadrotor UAVs and heat in onboard electronic elements, that result in rapid power loss. 37 An adaptive switching-gain SMDO is proposed to reduce chattering in SMDO, with the switch gain attenuating to zero as the DO converges in the inner loop, automatically reducing any unnecessary switching actions and thus reducing chatter.34,38
In this work, we design a continuous high-order sliding mode-assisted DO (HSMDO) to estimate disturbances precisely and apply it to address issues wherein quadrotor UAVs are susceptible to disturbances during operation. By doing so, we enable UAVs to achieve good performance through the use of simple tracking controllers. The primary contributions of this study are summarised as follows:
(1) The backstepping controller based on the HSMDO is designed to enforce the insensitivity of quadrotor UAV systems to variations in uncertainties.
(2) The HSMDO that combines DO and SMAD is designed to estimate the disturbances in quadrotor UAV systems precisely. It is effective at handling diverse types of disturbances with finite-time estimation. Moreover, the output of the HSMDO exhibits smooth changes without noticeable chatter behaviour and does not consume unnecessary energy.
(3) The proposed SMAS has four major terms: first, the overall system, which uses high-order sliding mode technology to reduce the chattering of the out-compensation signal; second, the sliding mode surface, which is a nonsingular terminal sliding mode surface to ensure finite time convergence; third, switching gain by using adaptive rates for optimisation; and finally the switching function, which is approximated by a tangent hyperbolic function to further reduce chattering.
The rest of this paper is organised as follows: The dynamic model of a quadrotor UAV and the relevant lemmas required for subsequent chapters are introduced in section ‘Problem formulation and preliminaries’. The design procedure and stability analysis of the proposed HSMDO are described in section ‘HSMDO design’. The design and stability analysis of the tracking controller are presented in section ‘Trajectory tracking controller design’. Some simulation results for a quadrotor UAV system are provided in section ‘Simulation and Experimental Results’. Finally, the paper is concluded in ‘Conclusions’ section.
Problem formulation and preliminaries
A quadrotor UAV is a six-degree-of-freedom under-actuated system powered by four motors. By changing the speed of the four rotors through motors, various flight manoeuvres can be flexibly completed. The structure of a quadrotor UAV is illustrated in Figure 1. An Earth coordinate system
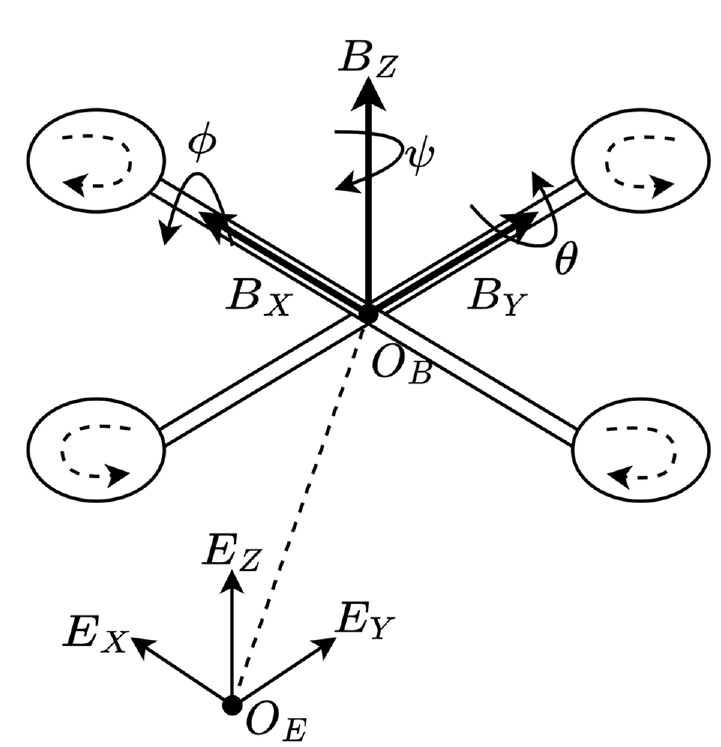
Structure and coordinate system of the quadrotor UAV.
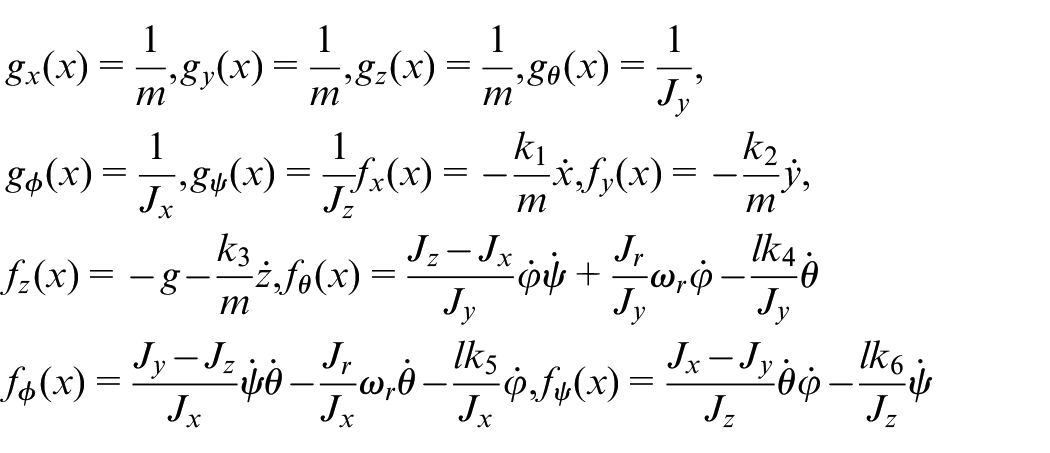
Assuming that the quadrotor UAV is a rigid body with structural symmetry and uniform mass distribution, the dynamics model of the quadrotor UAV is39–41
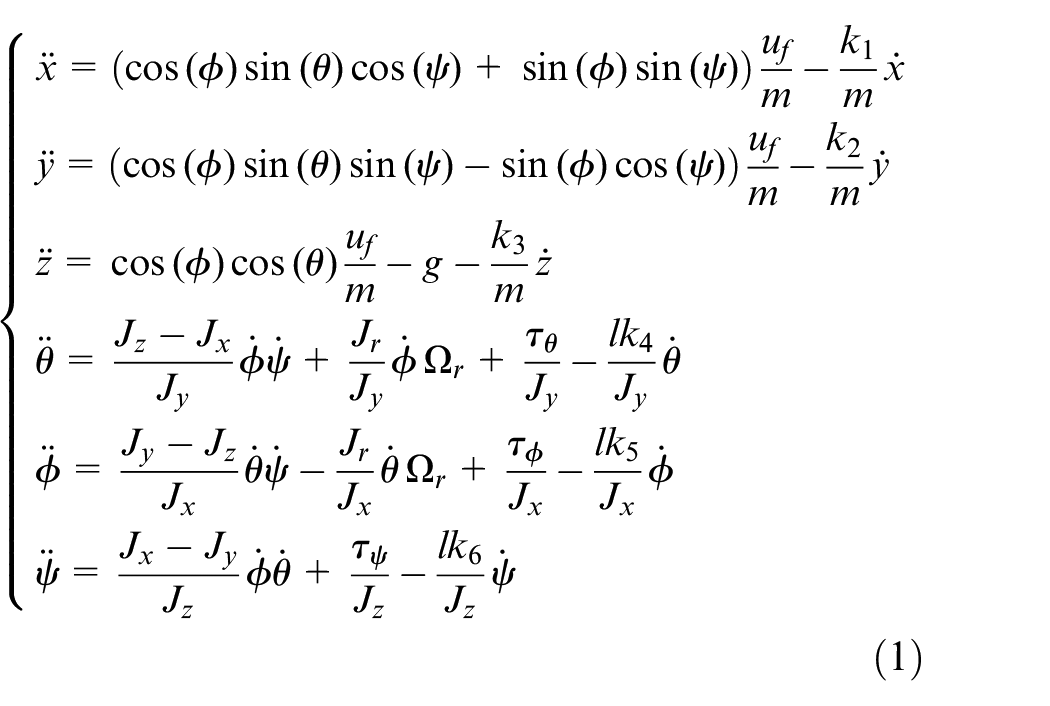
where
The control inputs are expressed as
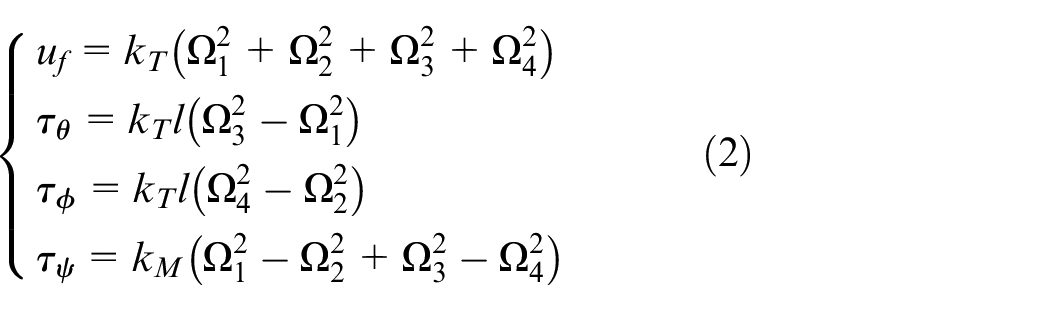
where
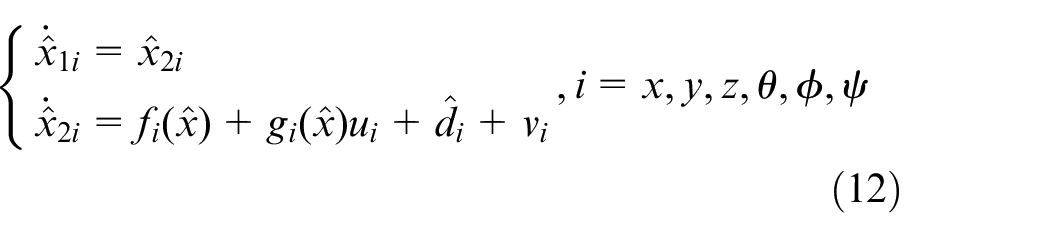
We consider the system modelling error and external disturbance as an integration item and define

where the state and input vectors are given below:

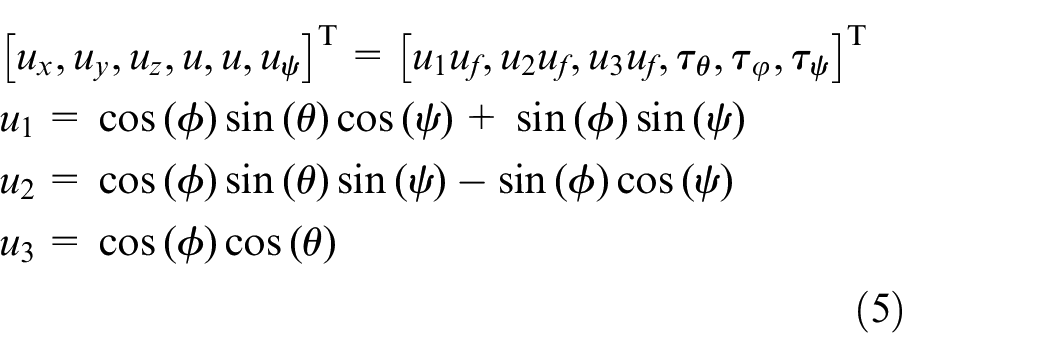
where
Remark 1: Since the quadrotor UAV system is an under-actuated system with four inputs and six outputs, it is impossible to independently and accurately track all six degrees of freedom. As shown in Figure 2, the control scheme adopted in this paper tracks the trajectory
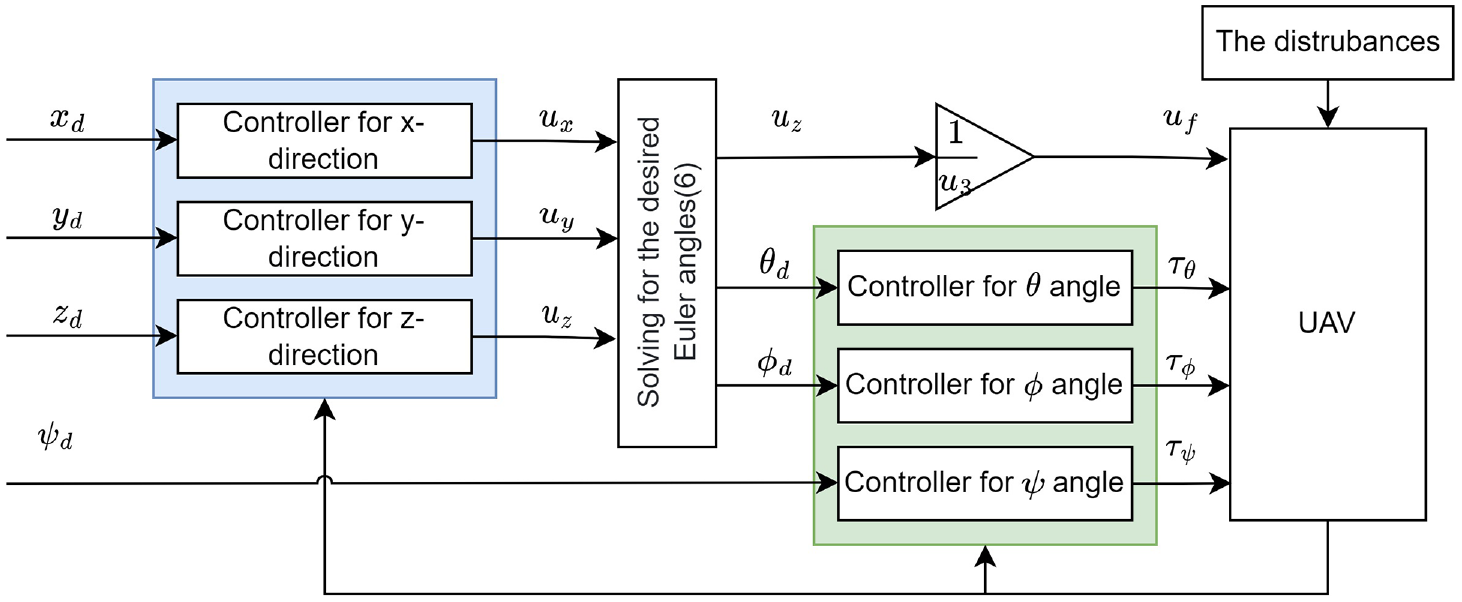
Control structure.
The concrete expressions of
The following assumptions and lemmas are given for the purpose of controller design and stability analysis.
HSMDO design
DO design
For the disturbance
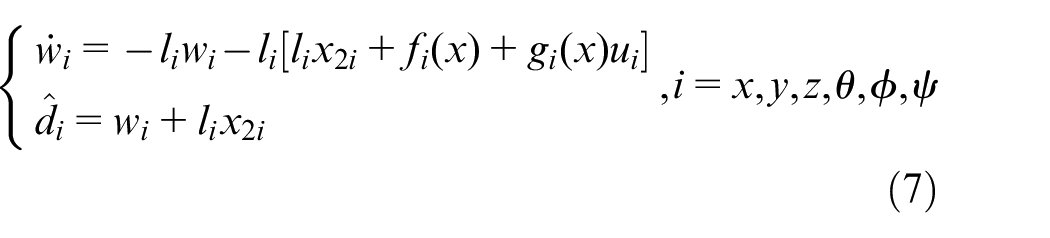
where

A positive-definite Lyapunov function is chosen as

We take the time derivative of (9) and obtain
According to Assumption 2, we acquire

According to Lemma 1, by selecting the parameter
SMAS design
As per Theorem 1, the DOB design is reasonable and allows for the easy adjustment of parameters, facilitating the effective estimation of unknown lumped disturbances in the system. However, dynamic estimation by the NDO is not instantaneous. This situation results in a disparity between the estimated and actual values of disturbance that becomes increasingly pronounced when the system experiences rapidly changing disturbances, such as strong winds, collisions and Coulomb friction. Therefore, an SMAS is designed as described below to assist the NDO in estimating disturbances.
First, the auxiliary system is defined as
where

The linear sliding mode surface is

where

The traditional SMC law usually leads to chattering in practice due to the use of the sign function
A nonsingular terminal sliding surface is defined as
where
By setting

Here,
where
where


where
By taking the derivative of (22), we acquire

Substitute (18) into (23), we obtain

Substitute (20) into (24) and simplify, we acquire
Let
Next, we get
According to Lemma 3, we have

According to Lemma 2, the sliding mode variable

By taking the derivative of (26), we acquire
The Lyapunov stability theorem states that this origin is in the state of global equilibrium. Furthermore, if
By taking the integral of both sides of inequality (30) from to

Consequently, the sliding mode variable

By taking the derivative of (32), we acquire
Given

According to Lemma 2, the dynamic error
Trajectory tracking controller design
On the basis of the above discussion, the controller should be designed as follows to control system (3) under unknown disturbances:

Here, the compensation signals
First, tracking error is defined as

where
The first Lyapunov function is selected as

By taking the derivative of (37), we have

where

where

The second Lyapunov function is selected as

By taking the derivative of (41), we obtain
Similarly, the control laws are as follows.

where

By taking the derivative of (44), we obtain
Given that
Simulation and experimental results
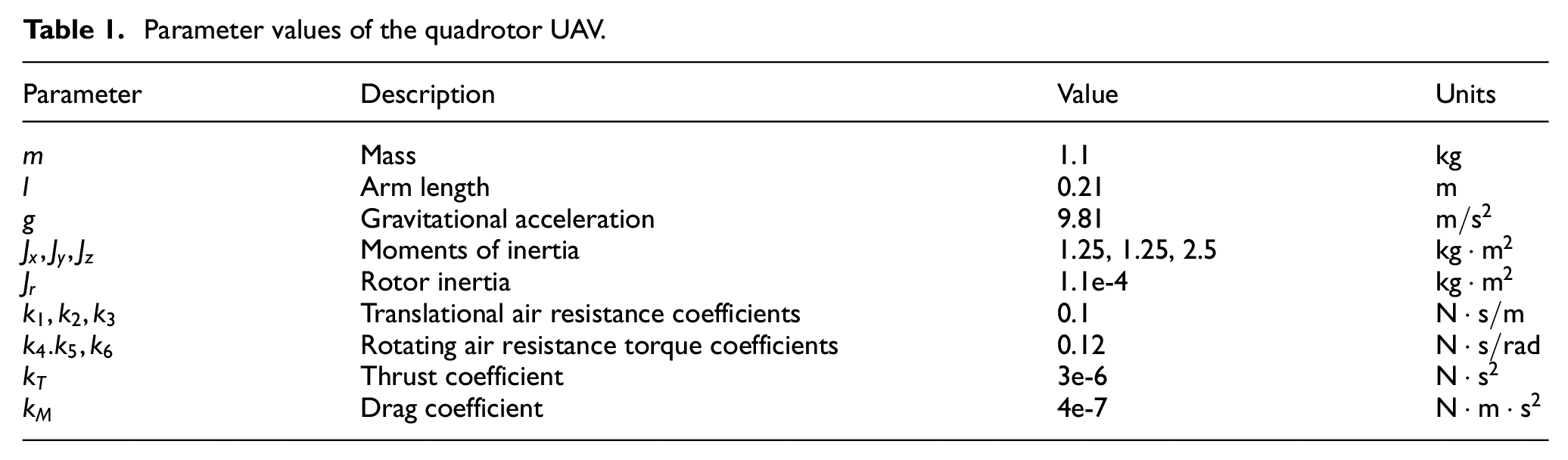
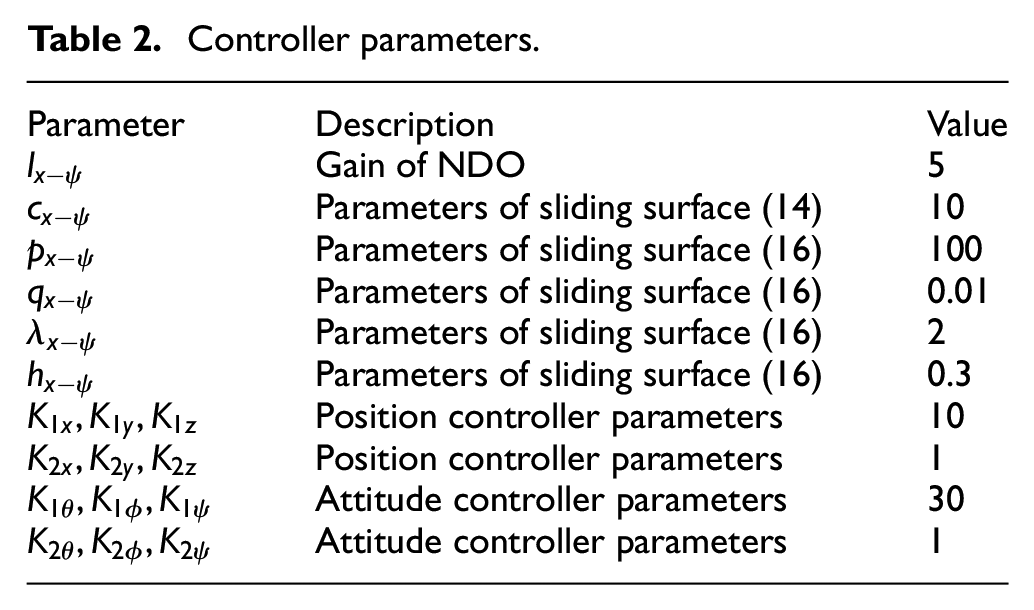
As described in this section, the performance of the proposed controller and sliding mode-assisted observer system is evaluated through numerical simulation experiments on a quadrotor UAV system in the Matlab/Simulink environment. For comparative simulation experiments, we design three controllers for the quadrotor UAV system: classic BC, BC based on NDO (DO-BC) and BC based on the HSMDO (HSMDO-BC). The simulation parameters listed in Tables 1 and 2.
Parameter values of the quadrotor UAV.
Controller parameters.
The simulation time is set to 40 s, and the desired position–attitude trajectories of the quadrotor UAV are given as

The initial conditions of the quadrotor UAV are

Three different external disturbances are applied starting from 10 s to verify the effectiveness of SMNDO. First, the specified step disturbance and constant disturbance between 10 and 20 s are given as

Second, the periodic disturbance from 20 to 30 s is given as

Third, the random disturbance from 30 to 40 s every 1 s is given as

where
Figure 3 shows the three-dimensional tracking curves of the UAV. It illustrates that although all three control methods can achieve trajectory tracking for the quadrotor UAV, their tracking accuracies are different. BC is more seriously affected by external disturbance than DO-BC and HSMDO-BC. By contrast, DO-BC and HSMDO-BC have better tracking accuracy than BC. Figures 4 to 7 illustrate the simulation results of a quadrotor UAV tracking target commands
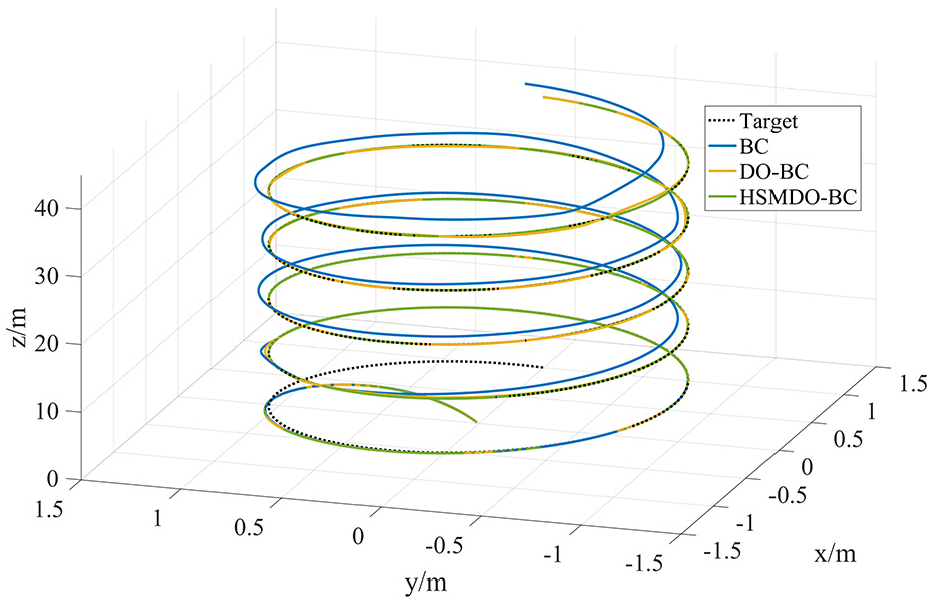
Three-dimensional tracking curves of three control schemes.
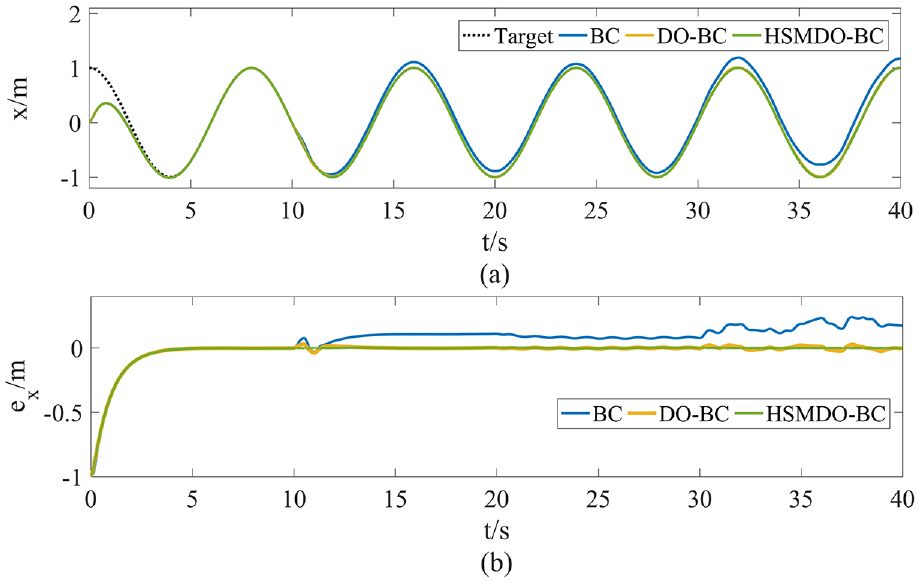
Position tracking results of the x-axis: (a) position tracking curve and (b) position tracking error curve.
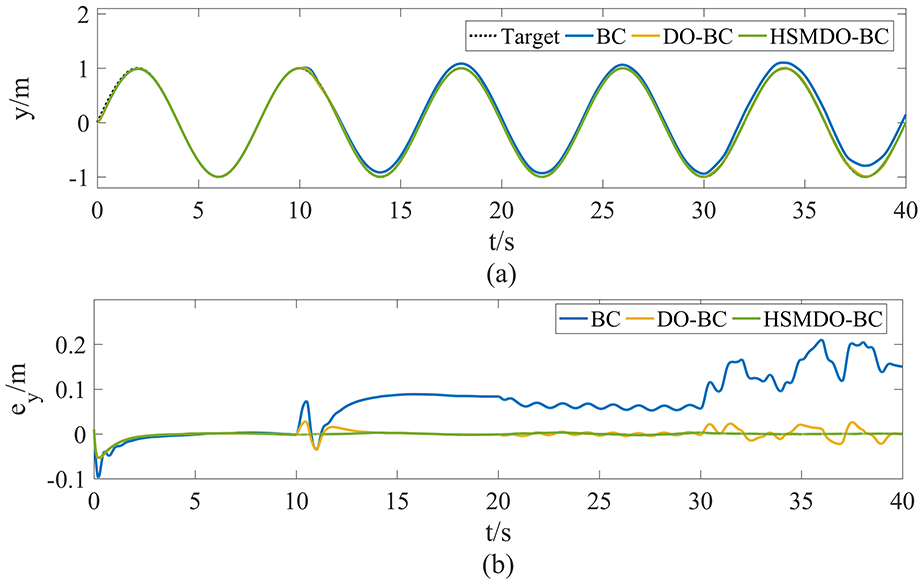
Position tracking results of the y-axis: (a) position tracking curve and (b) position tracking error curve.
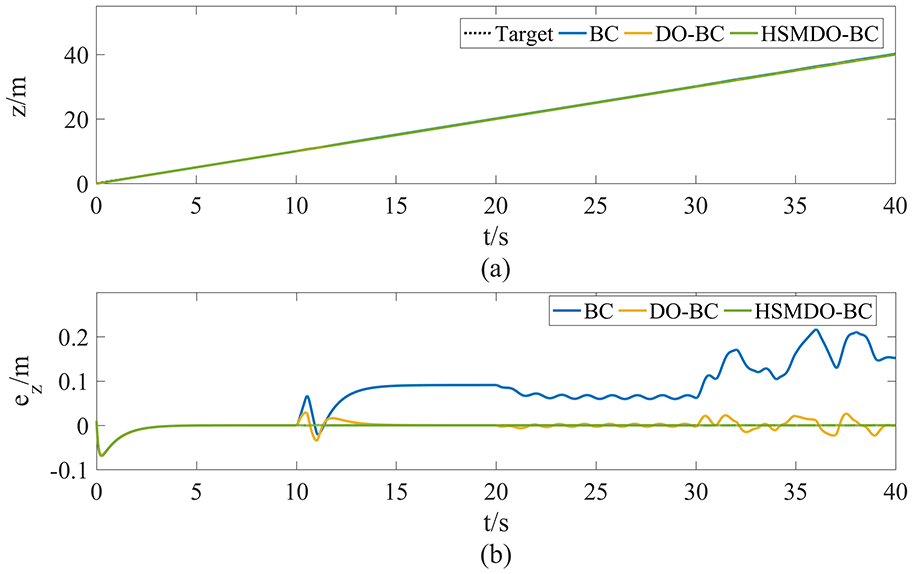
Position tracking results of the z-axis: (a) position tracking curve and (b) position tracking error curve.
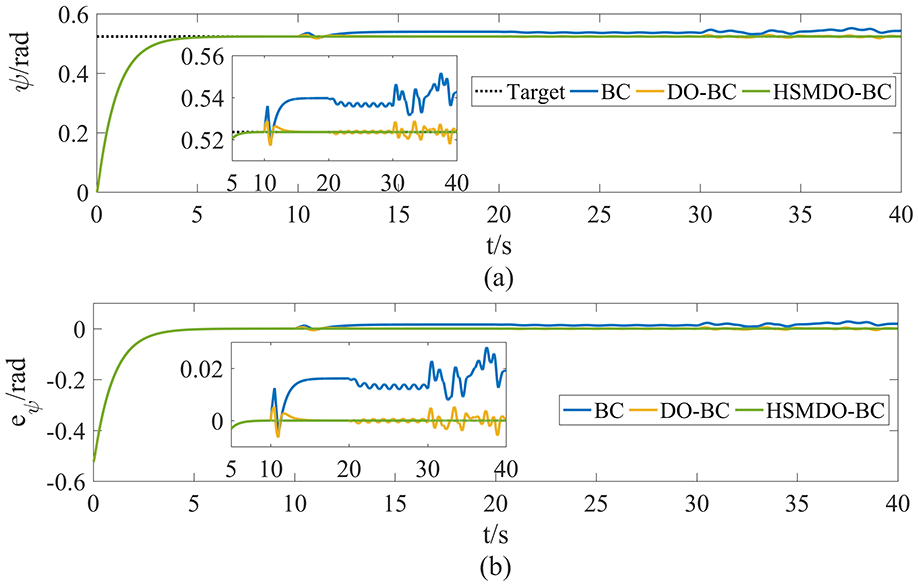
Yaw angle tracking results: (a) tracking curve and (b) tracking error curve.
Figures 8 and 9 display the simulation results of tracking the desired attitude angles
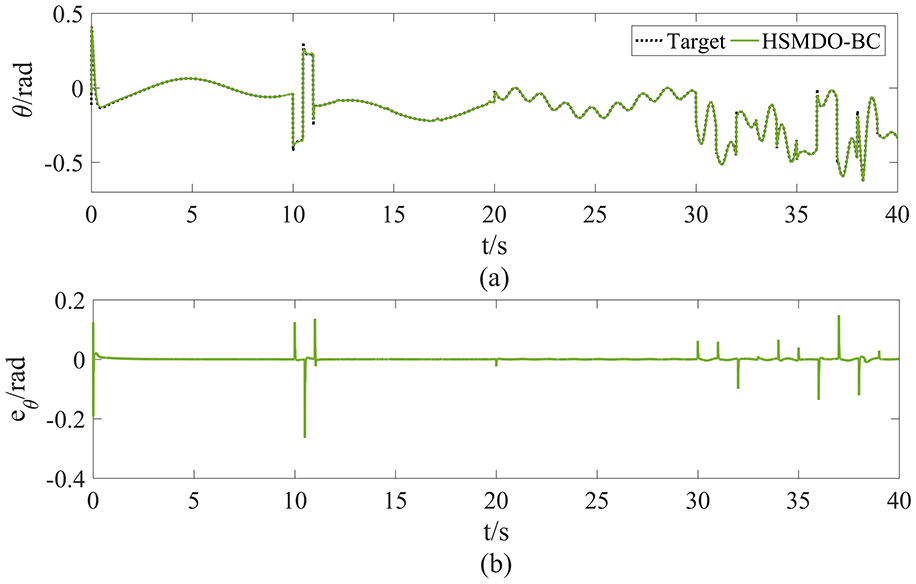
Pitch angle tracking results in this paper: (a) tracking curve and (b) tracking error curve.
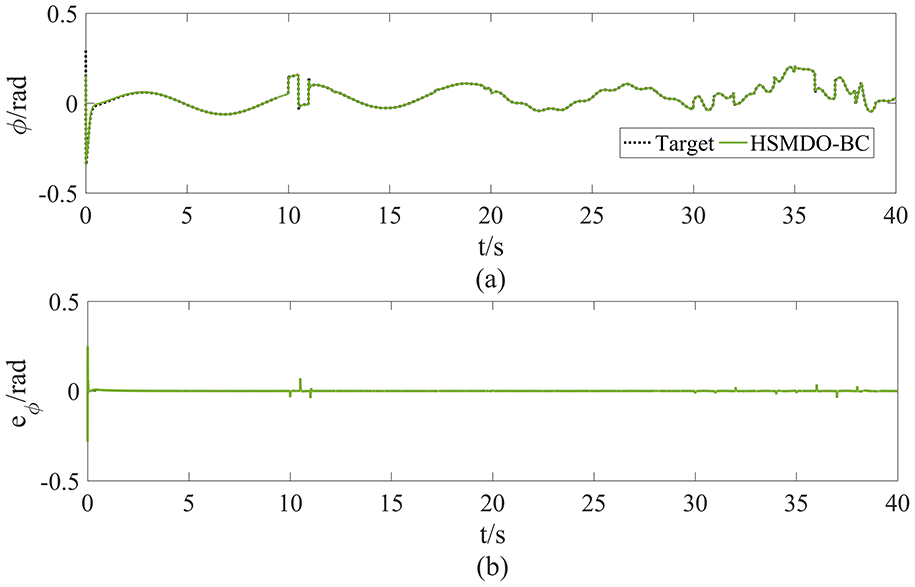
Roll angle tracking results in this paper: (a) tracking curve and (b) tracking error curve.
Figures 10 and 11 show the disturbance estimation curves of the UAV position and attitude system, respectively. As can be seen from these figures, the HSMDO and NDO have similar performances in estimating constant disturbance. In the estimation of periodic fluctuation disturbance, the HSMDO has higher accuracy than NDO. In the estimation of step and random disturbances, the traditional NDO has slow response times that lead to the inability to estimate disturbances in a timely and effective manner, whereas the HSMDO continues to exhibit excellent estimation speed and accuracy. This finding further verifies that the HSMDO can effectively improve the problems, such as narrow bandwidth and low estimation accuracy, of traditional NDO estimation. Furthermore, the output compensation signal from the HSMDO exhibits smooth changes without noticeable chatter behaviour, thereby avoiding unnecessary energy consumption and aligning with practical engineering requirements.
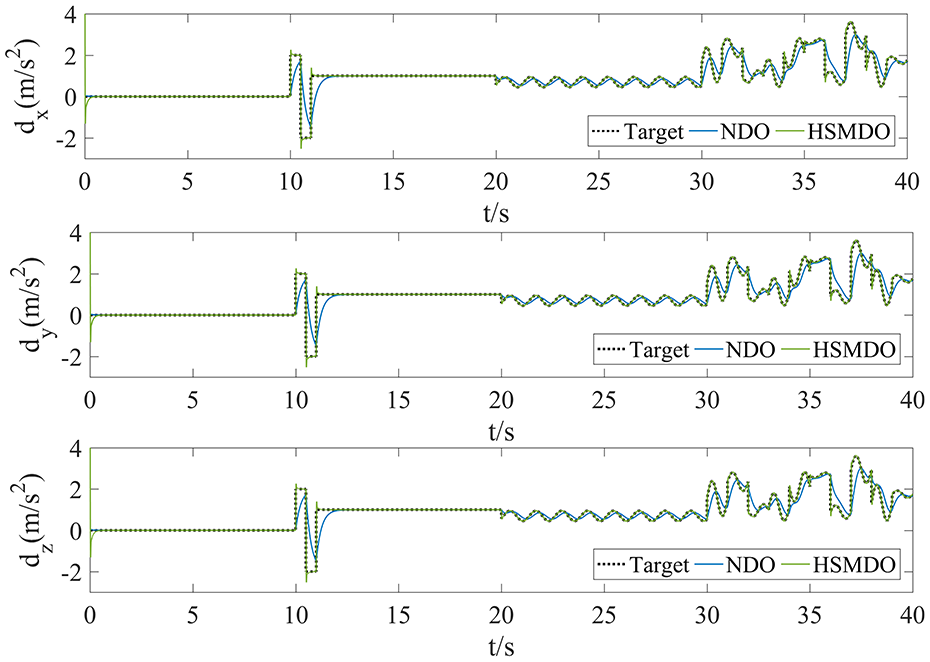
Disturbance estimation curve for the position system.
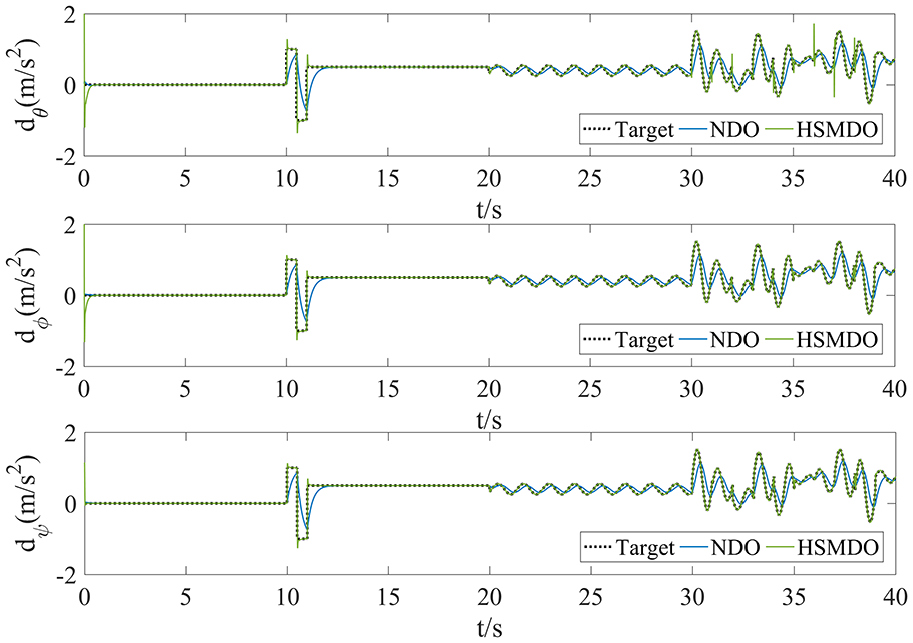
Disturbance estimation curve for the attitude system.
Figure 12 presents the actual control input responses for the quadrotor UAV under three different control methods. As illustrated in the figure, the actual control variable amplitudes are similar, and the energy required by the controller is at the same level, which meets actual engineering needs.
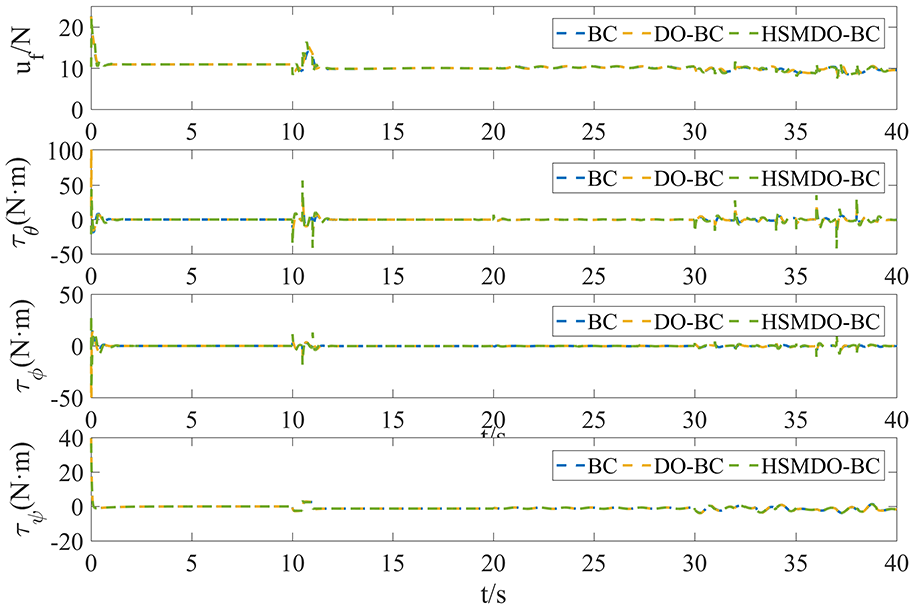
Actual control input curve.
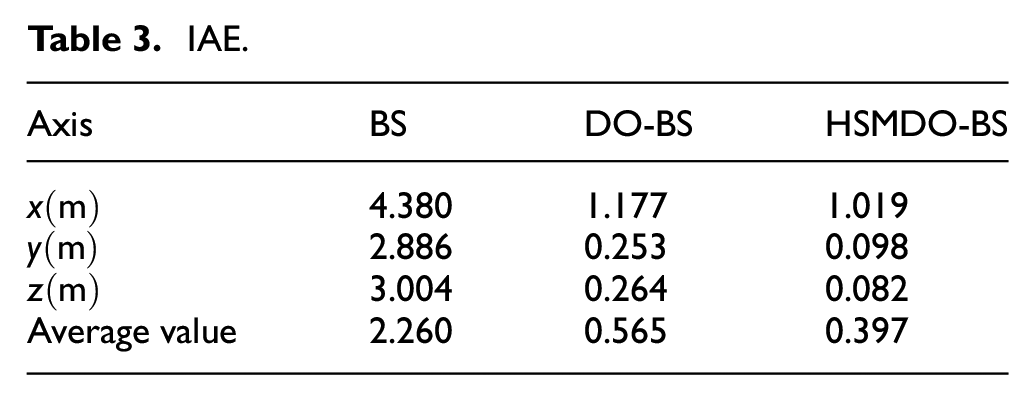
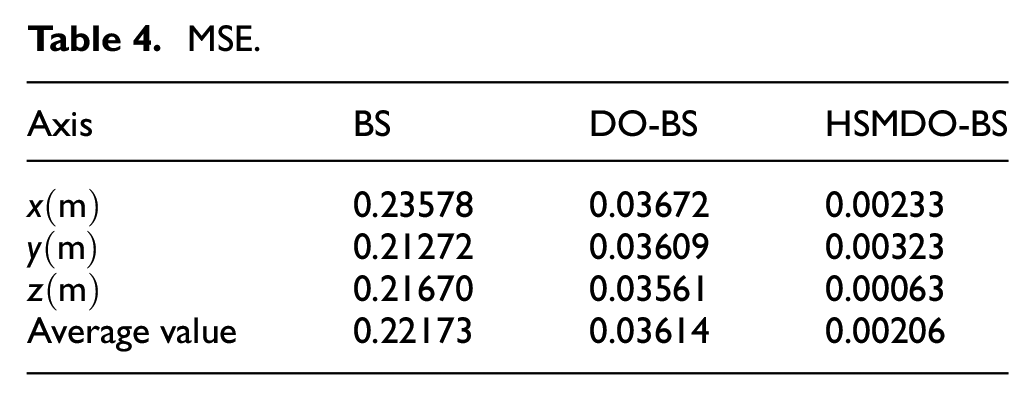
Finally, integral absolute error (IAE) and maximum steady-state error (MSE) are introduced as performance evaluation indices to analyse the antidisturbance performance and tracking accuracy of different control methods quantitatively. IAE is calculated as

where t0 and ta represent the simulation start and end times respectively, and e(t) denotes the tracking error. Tables 3 and 4 provide the IAE and MSE values of different control algorithms. The data in the table show that the IAE and MAE of DO-BC and HSMDO-BC are significantly lower than those of BC. This result illustrates that the closed-loop DO has a positive effect on improving system robustness. Compared with DO-BC, HSMDOBC has lower IAE and MAE in three directions. Specifically, along the x-axis, its IAE and MAE have decreased by 13.4% and 93.7%, respectively. Along the y-axis, its IAE and MAE have decreased by 61.3% and 91.1%, respectively. Along the z-axis, its IAE and MAE have decreased by 68.9% and 98.2%, respectively. These results demonstrate the superior performance of HSMDO-BC in reducing estimation error and enhancing system stability.
IAE.
MSE.
Conclusions
This work investigates the problem of trajectory tracking control in quadrotor UAVs in the presence of different external disturbances, including constant, step, periodic and random disturbances, and proposes a method for trajectory tracking control based on a novel HSMDO. Simulation results demonstrate that the designed HSMDO effectively estimates unknown disturbances in the system, reducing the burden on tracking controllers and enabling the maintenance of accurate tracking by using simple tracking controllers. The output compensation signal from the HSMDO exhibits smooth changes without noticeable chatter behaviour, thereby avoiding unnecessary energy consumption and aligning with practical engineering requirements. The proposed control strategy provides a new perspective for the design of flight control algorithms for quadrotor UAVs. In future work, our aim is to validate the performance of our control strategy in challenging environments. Additionally, we will conduct research on predicting actuator failure and addressing the problem of safe return after failure.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the National Key Research and Development Projects of China (2016YFD0800902), the Major Technological Innovation Project in Hubei Province of China (2017ABA157), the Hubei Provincial Farmland Environmental Monitoring Engineering Technology Research Center (Three Gorges University) Open Fund (201613) and the Scientific Research Project of Education Department of Hubei Province (Q20201206).
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.