Compared with bounded delays, distributed infinite delays are more general in practical systems. Event-triggered control can effectively reduce energy consumption and communication costs. This paper addresses time-varying formation control of general linear multi-agent systems with distributed infinite delays in both of their inputs and outputs. An observer-based event-triggered formation control protocol considering distributed infinite delays is proposed, which is related to the combined observed information and some formation compensation signals at triggering time instants. By utilizing inequality techniques, the desired time-varying formation can be implemented while Zeno-behavior is excluded. Some numerical simulations are carried out for demonstrating the validity of theoretical results.
Formation control, as a crucial embranchment in the field of cooperative problem of multi-agent systems (MASs), drives agents to accomplish the specified missions collaboratively through designing control laws to achieve a prescribed time-invariant or time-varying geometric configuration. However, it is very difficult for fixed formation to adjust relative locations timely according to variable environment, and to expand or contract the movement scales while performing some complex collaborative tasks. Consequently, theoretical and technical studies on time-varying formation (TVF) control have drawn considerable attention,1–4 and also, the results of TVF are applicable to time-invariant formation and consensus control.
Time-delay phenomena are inevitable in complex networked systems on account of very frequent information exchange among various digital devices, which can bring about deterioration of system performance and instability of system. Until now, much progress has been made in investigating formation problem with time delays.5–8 Notably, most of the existing studies considered bounded delays. However, many real systems generally possess a spatial extent of time delays and cannot be well modeled by dynamical systems with bounded delays. Distributed infinite delays may better characterize such complex hysteresis phenomena and have some significant applications, such as traffic flow systems,9 biological systems,10 mechanics,11 neural networks,12 and so on. Consensus problem with infinite delays of MASs was discussed for single integrator MASs13 and linear MASs,14 respectively. The output containment control of heterogeneous MASs with unbounded distributed transmission delays was presented.15 The authors16 addressed the robust cooperative output regulation problem of heterogeneous uncertain MASs with unbounded distributed transmission delays. The authors17 focused on the formation-containment tracking for heterogeneous MASs under distributed infinite transmission delays. Leader-following formation control of MASs with distributed infinite input time delays was studied.18 Nevertheless, there are few report on time-varying formation control with distributed infinite delays so far, which motivates us to carry out this work.
The key of implement of the desired formation is to design appropriate distributed control protocol based on states of agents. However, it is more difficult to measure some internal state information of MASs than general output information. Thus, observer-based control mechanism for formation problem has generated growing interest.19–25 On the other hand, aiming at the limitation of communication bandwidth and data storage capacities of microprocessor in real system, researchers raised event-triggered control (ETC) strategy to reduce interagent communications.26–30 Furthermore, observer-based event-triggered control technique, combining advantages of event-triggered and observer-based control, was put forward. By adopting complex-valued Laplacian, researchers31 presented a fully distributed event-triggered formation controller depending on the dynamic observed state. A dynamic event-triggered updating rule based on output feedback was put forward for bipartite TVF tracking.32 The authors33 developed two observer-based ETC algorithms to achieve formation in MASs with switching directed topologies. Considering collision avoidance, researchers raised a distributed event-triggered control technique based on state observer to handle formation problem.34 To form circle formation, an observer-based ETC method was presented.35 The authors36 introduced an event-triggered control scheme that utilizes observed states and incorporates certain formation compensation signals.
Motivated by the above discussions, the current work studies observer-based event-triggered TVF for linear MASs with distributed infinite delays in inputs and outputs. Our main contributions are summarized: (i) Compared with state-based controller of linear systems only taking into account distributed infinite input delays,13,14 an observer-based scheme is explored for linear MASs with distributed infinite delays in the course of both input and output signal transmission, which is more general, rational and also accords with the practical situation. (ii) Event-triggered control schemes36,37 were related not only to the combined observed information at triggering time instants but also to the continuous monitor of formation compensation signals. However, the ETC protocol utilized in this paper is only in connection with these information at triggering time instants, which can avoid continuous updates of controller. As a result, it conserves more energy. (iii) The TVF problem is transformed into a consensus problem using an orthogonal row matrix. A sufficient condition on TVF along with Zeno-free triggering is derived.
The remaining parts are organized as follows. Graph theories and problem formulation of observer-based event-triggered TVF are provided in Section 2. Detailed analyses of the sufficient condition for TVF, along with discussions on Zeno-free behavior, are presented in Section 3. To illustrate the performance of the controller, numerical simulations are provided in Section 4, followed by the final conclusion.
Notations: Let and be the set of -dimensional real column vectors and -dimensional real matrices, respectively. For a matrix , represents the eigenvalues of A, is the real part of , stands for its transpose. The Kronecker product of two matrices and is represented by . A diagonal matrix with diagonal elements , , is denoted as . denotes the induced matrix norm. For , is the Euclidean norm.
Preliminaries
Graph theories
An undirected graph is utilized to depict the communication topology with agents. Denote be an undirected graph with a set of nodes , an edge set a weighted adjacency matrix with if and only if , and otherwise. The undirected graph means that if and only if . represents the neighbor set of node . Let with be the degree matrix of , then Laplacian matrix . is connected if there exists a path from node to .
Lemma 1.If is connected, the eigenvalues of are .
Problem formulation
We consider linear multi-agent systems (MASs) consisting of N agents. The dynamics of each agent are of the form
where , , are constant matrices, satisfying . , , and stand for the state, output and control input, respectively. : is the delay kernel satisfying and for some positive constant .
To avoid directly utilizing the internal states of all agents, we reconstruct the system states by designing a state observer. The dynamics of the observer are
where is the observer state of , is the measured output of the observer, and is the observer gain matrix with appropriate dimensions to be determined later.
Let be the state estimation error.
From (1) and (2), one has
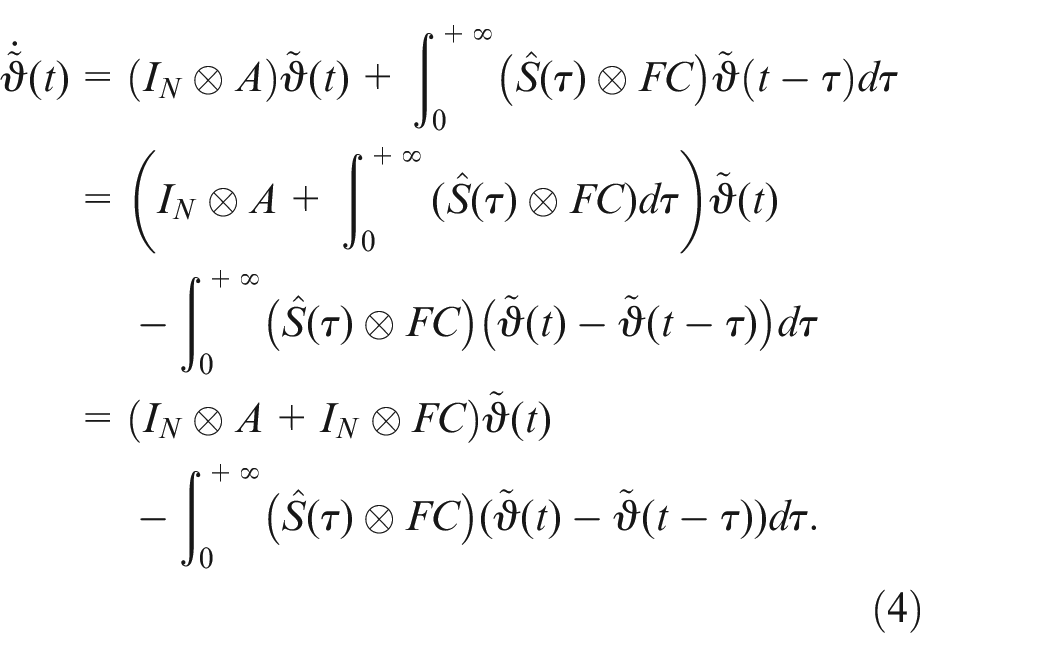
Denote , diag. According to , one gets . Then,
Theorem 1.If is detectable, then one can select a control gain matrix to make sure that the state estimation error is exponentially stable. Namely, there are positive constants and making
where .
Proof. Since is detectable, we can choose to guarantee is Hurwitz. Then, we get is Hurwitz. Hence, for , we can choose these positive constants and satisfying
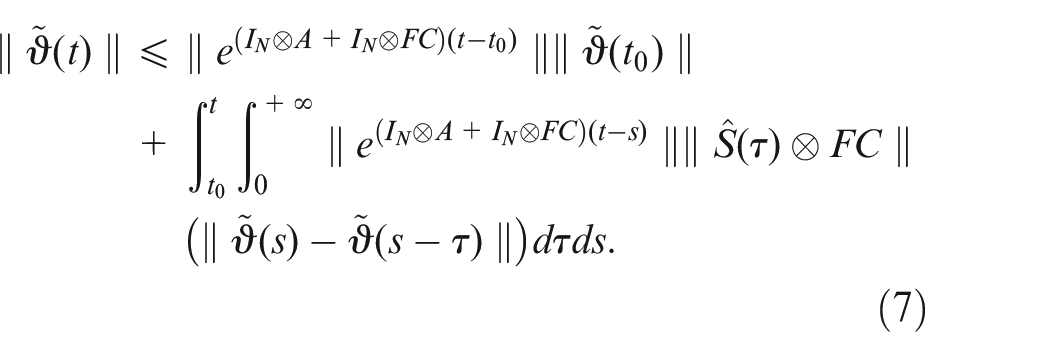
Recalling (4), utilizing the variation of parameter formula gives
As a result, due to (6), (7) can be rewritten as
Next, for , we will prove
It is noted that inequality (9) holds for .
If (9) is not satisfied, one can find satisfying and when .
Subsequently, according to (8), one can further derive
Let . Moreover, there is a positive constant satisfying and . Thus,
Let and .
Since , one gets and then , that is, . Thus,
This contradiction of (12) implies that (9) is valid for any . Letting , the inequality (5) can be obtained.
The proof is completed.
Definition 1.Denote
be the desired TVF, which is a bounded piecewise differentiable vector function. MASs (1) is called to implement the desired TVF if
holds with any given bounded initial conditions.
Motivated by the TVF control law,36–38 we design the following ETC strategy:
in which is the gain matrix to be determined later, : is the delay kernel satisfying and for some positive constant , with ,
represents the formation compensation signal to expand the feasible formation set.38 stands for the triggering instant defined by the following equation
in which
is the triggering function with and , the formation compensation signal error , the combined measurement error . and are reset to zero when .
Let be an matrix with orthogonal rows which are orthogonal to , that is
Because is an orthogonal projection matrix onto the span of according to the property of , and that is in the null space of , one gets , then .
Lemma 2. The matrix and have the same nonzero eigenvalues.39
Lemma 3. If is stabilizable, for any , there is a symmetric positive definite matrix making the following algebraic Riccati equality (ARE) satisfy
Consequently, according to Lemma 2, we can derive that all eigenvalues of are positive. It is evident that there exists such that . Referring to (17), it can be deduced that all eigenvalues of are negative. Letting , all eigenvalues of are negative. To proceed, all eigenvalues of are negative. Thus, for , there are positive constants and such that
Definition 2.The event-triggering time sequence is free of Zeno-behavior if for all .
Main results
Based on the above preliminaries, a sufficient condition on TVF is put forward under the designed ETC scheme (13) while Zeno-behavior in is excluded in the following.
In order to read conveniently, denote
and , where is a positive constant.
Theorem 2.Consider linear MASs (1) with observer (2) and ETC protocol (13) for . The triggering time instants are determined by (14). Assuming that there exists differentiable vector function and is bounded, satisfies
Then, for , and , the desired TVF is feasible if is stabilizable, is detectable and is connected.
Proof. In term of (1) and (2), it holds
Let , , . (20) becomes
in which and with
Let . By , we have . Then system (21) becomes
where .
Utilizing variation of parameter formula yields
Combining (18) and (23) yields
According to triggering condition (15), one has
As a consequence,
then,
in which .
By Theorem 1 and (26), from (24), we have
Then,
Let , .
Since and , we get
where .
Since , one has , and then, . Furthermore, and . Thus, a positive constant satisfying can be found to make sure .
Let .
Let .
Next, we’ll prove
holds for . It is noted that inequality (30) holds for .
Otherwise, we can find satisfying and when .
Subsequently, inequality (29) leads to
Let . Moreover, there is a positive constant satisfying and . Then,
where .
Case : , which indicates that
Then,
Case : , which indicates that
Then, one has
Under the contradictions in (33) and (34), inequality (30) is valid. Consequently, letting leads to
Inequality (35) implies approaches to zero. Based on the above results, converge to . Thus, . Noticing for from (5), we have
which indicates that linear MASs (1) ultimately implement the desired TVF .
The proof is completed.
Theorem 3.Under the assumption that the conditions of Theorem 2 hold, is free of Zeno-behavior.
Proof. Denote
Then,
Thus,
Taking the upper right-hand Dini derivative of over gives
Substituting (5), (26), (35), and (36) into (37) yields
Let . Then,
where .
Computing the upper right-hand Dini derivative of over interval and noticing that is bounded, one gets
in which is the bound of .
Combining (39), (40), and , one has
The next event is triggered so long as crosses zero, that is
Hence,
Letting , we can obtain that
that is,
which implies , . Consequently, there is no Zeno-behavior for any .
This completes the proof.
Simulations
MASs under consideration consist of six agents in 2D space. Suppose
The delay kernels are given as: , which satisfy , , and by taking and , . Furthermore, one can compute that , and by choosing and .
Assume that
The desired TVF shape is
Putting condition (19) into consideration, can be chosen as
To guarantee A + FC is Hurwitz, we select .
Letting , by ARE, we have
Then,
with . Given
one has , according to (18). By (6), we have and . Hence, we get and through calculation. Then by choosing . Thus, by Theorem 2, the desired formation can be reached for with and .
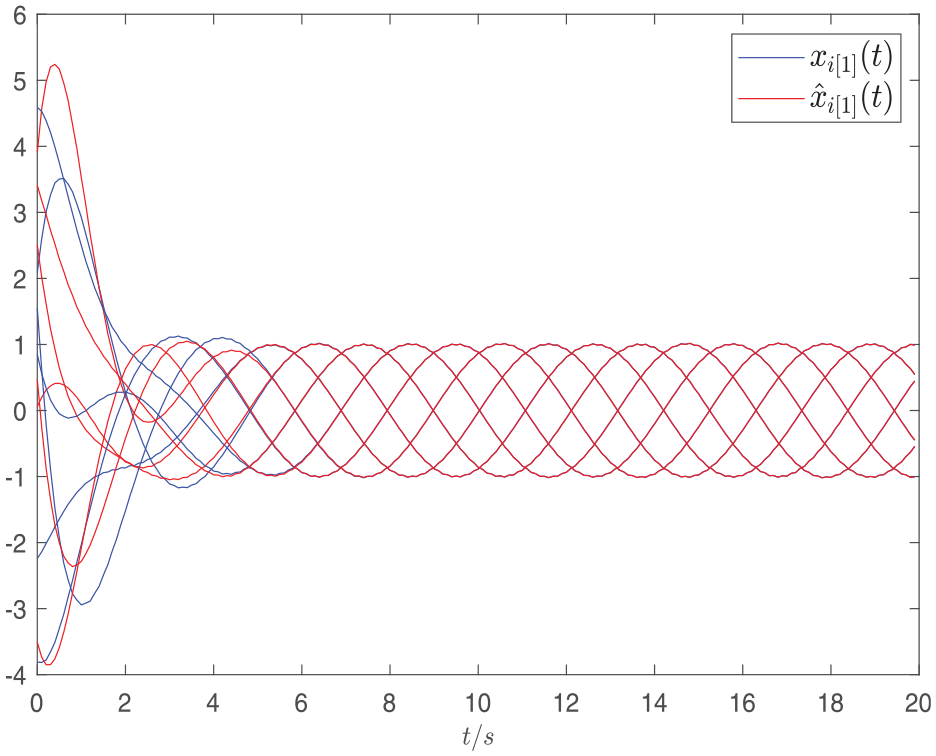
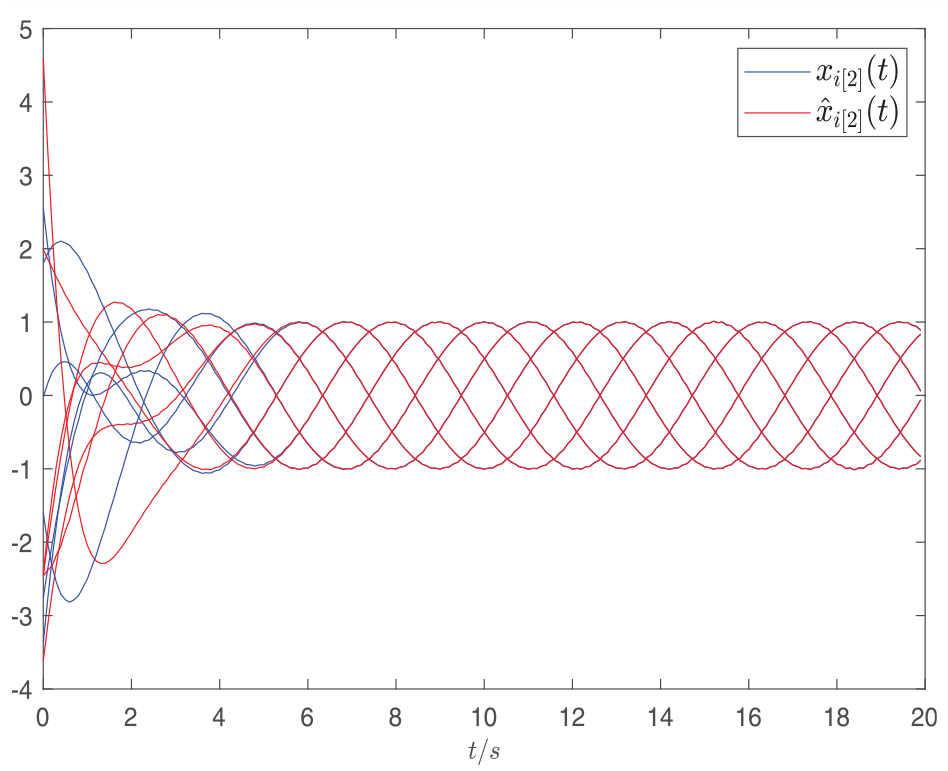
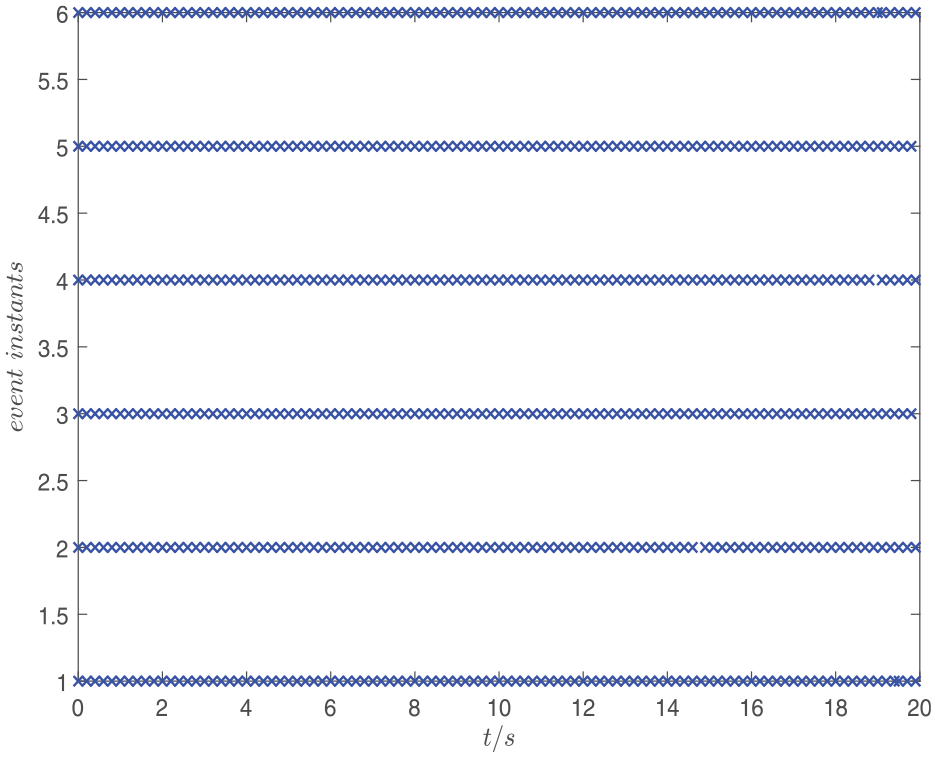
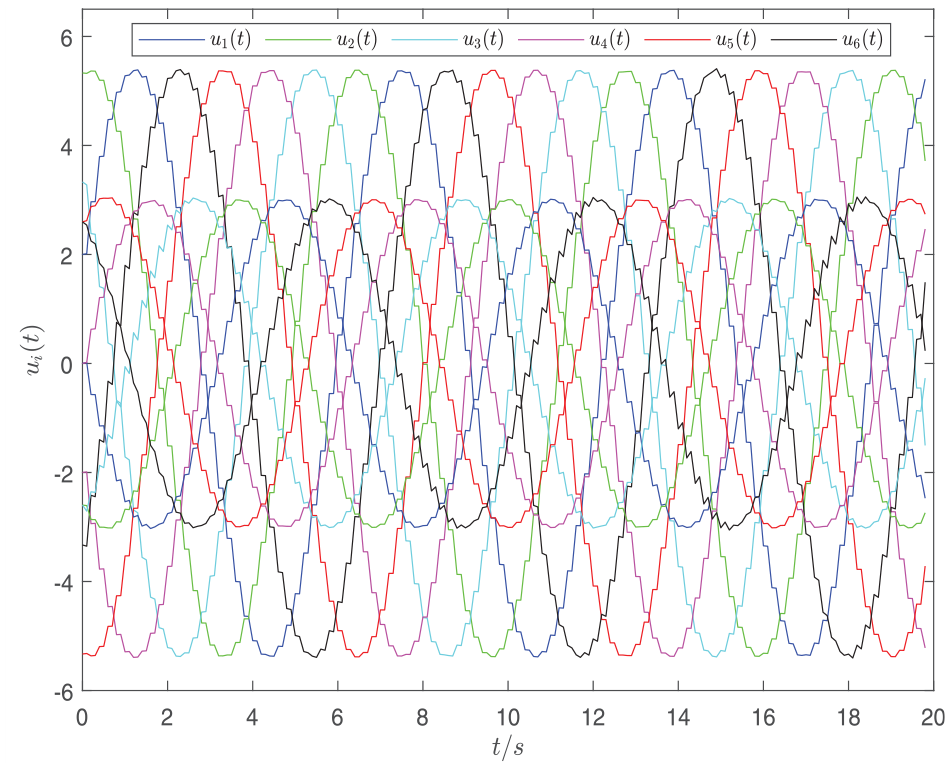
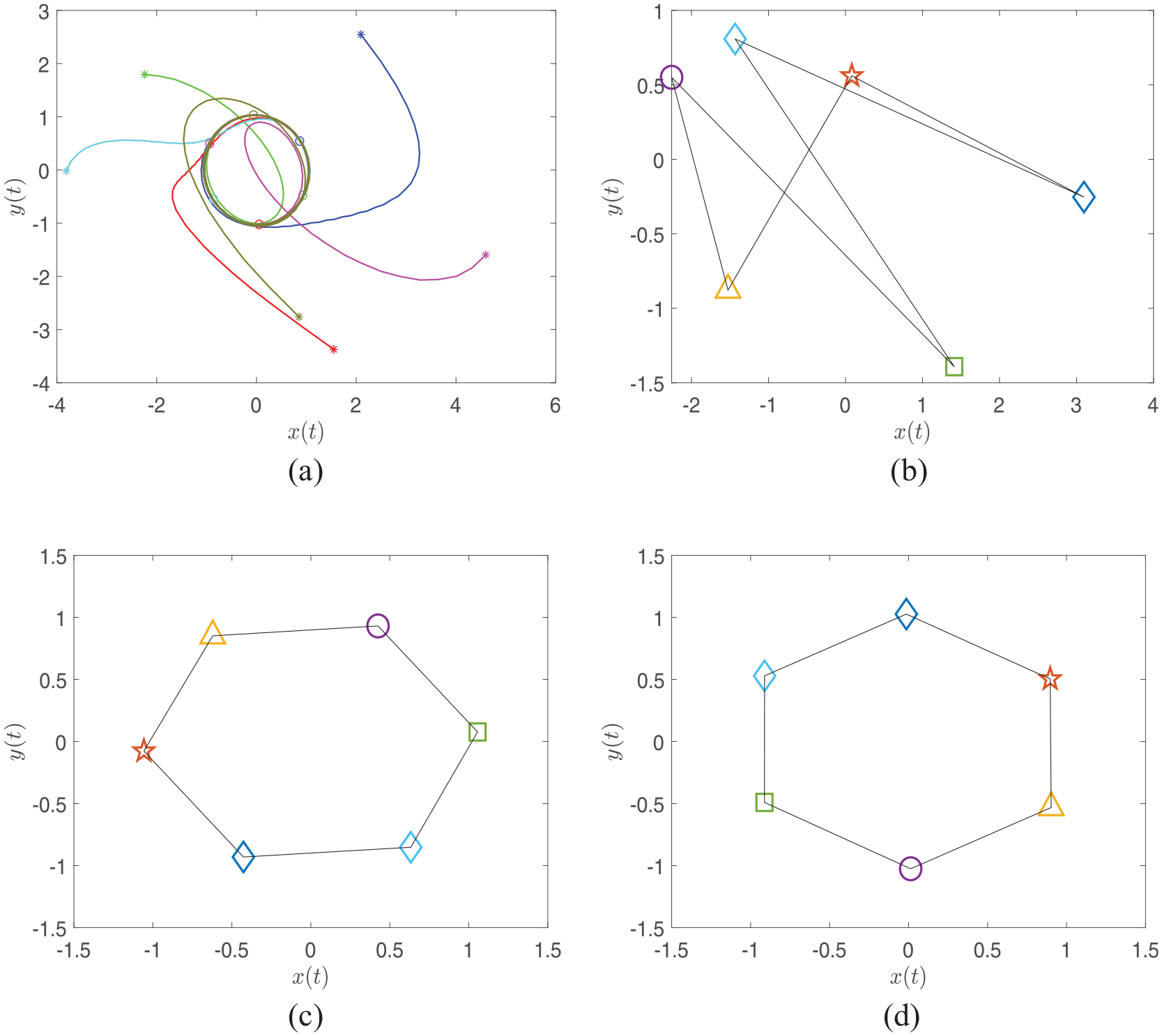
We randomly choose initial states and . In view of the given conditions in Theorem 2, let and . Figures 1–5 illustrate that the implement of desired TVF and Zeno-free behavior. Figures 1 and 2 show the motion trajectories of all agents and the state evolution of the observers. Figure 3 exhibits triggering instants. Figure 4 depicts the control input. The trajectories of six agents coupled with their shape at , and are shown in Figure 5.
Dynamics of each agent and the observer (the first component).
Dynamics of each agent and the observer (the second component).
Events for each agent.
Control input of each agent.
State snapshots: (a) the trajectory for each agent, (b) t = 1 s, (c) t = 11 s, and (d) t = 16 s.
Consider linear MASs (1) with observer (2) and the following continuous control protocol:
The proof of the implement of the desired TVF of MASs (1) with controller (43) is similar to that of Theorems 1 and 2, thus omitted here.
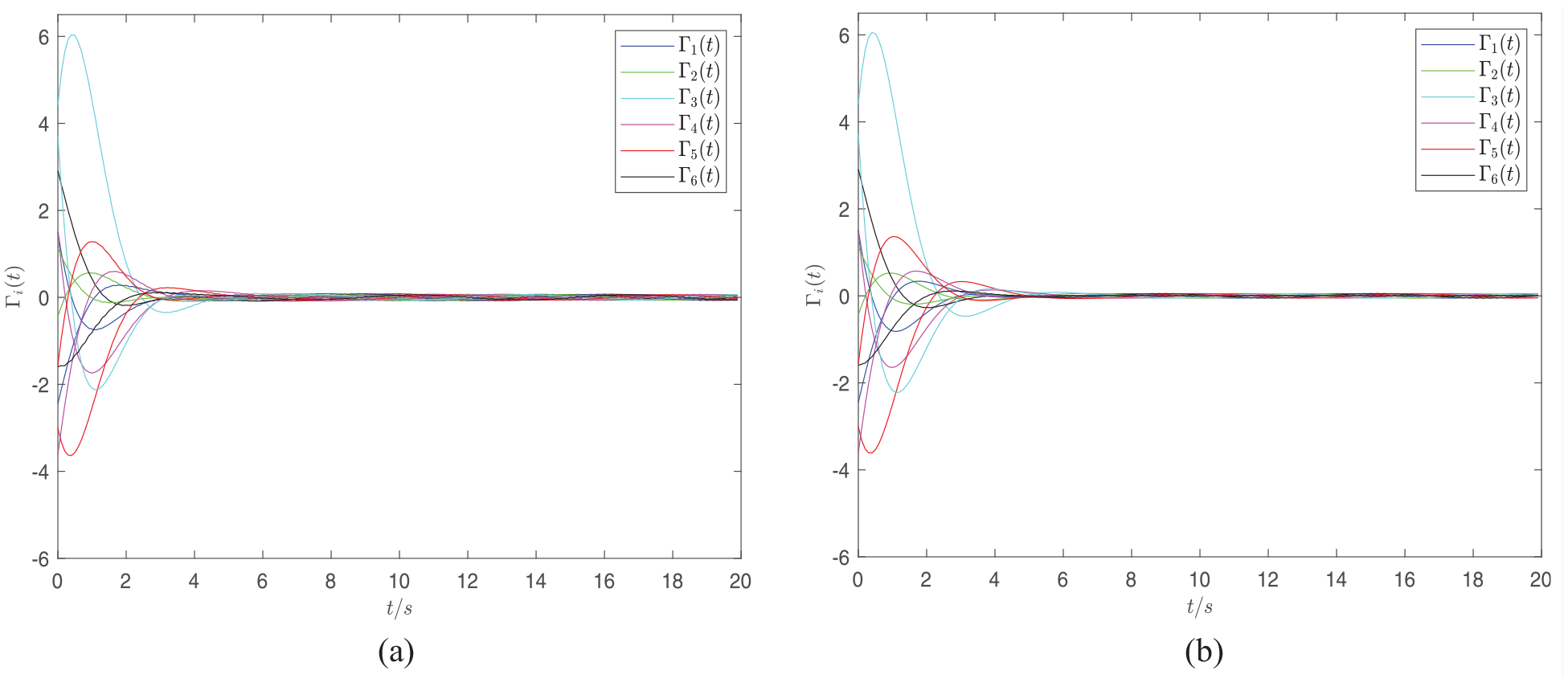
To compare our event-triggered control (13) with the continuous control (43), the variation trends of formation error based on the above same parameters and initial conditions for event-triggered control and continuous control are depicted in Figure 6(a) and (b), respectively. It is obvious that converges to the bounded region with the increase of time in both cases. Although it can be observed by comparing Figure 6(a) and (b) that the desired TVF can be achieved within the same time, the number of control update is reduced by event-triggered controller. In fact, the number of control update is 1200 in with sampling step of under continuous controller, while it is 600 under the event-triggered controller. It is, thus, demonstrated that the event-triggered mechanism proposed in this paper can reduce communication frequency effectively while maintaining control performance.
Formation error : (a) event-triggered control and (b) continuous control.
Conclusion
Time-varying formation control off linear MASs with distributed infinite input and output delays has been discussed in this study. To circumvent the direct utilization of individual agents’ internal states, a state observer has been developed to reconstruct system states. Aiming at reducing energy consumption and communication costs, an observer-based ETC scheme in consideration of the distributed infinite delays is then proposed, which can ensure the implement of TVF and the exclusion of Zeno-behavior in triggering time sequence. In future research, for a more comprehensive and realistic representation of MASs, we aim to explore TVF in heterogeneous MASs under uncertain disturbances.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was jointly supported by National Natural Science Foundation of China under Grant 62373071, Science and Technology Research Program of Chongqing Municipal Education Commission under Grant KJZD-K202000601, Chongqing Talent Plan under Grant cstc2021ycjh-bgzxm0044, Graduate Student Research Innovation Project of Chongqing Grant CYB22245.
ORCID iD
Wei Zhu
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study
References
1.
DongXHuG. Time-varying formation tracking for linear multiagent systems with multiple leaders. IEEE Trans Automat Contr2017; 62(7): 3658–3664.
2.
YangHYeD. Time-varying formation tracking control for high-order nonlinear multi-agent systems in fixed-time framework. Appl Math Comput2020; 377: 125119.
3.
ZhengCBPangZHWangJX, et al. Time-varying formation prescribed performance control with collision avoidance for multi-agent systems subject to mismatched disturbances. Inf Sci2023; 633: 517–530.
4.
LiWZhangHWangW, et al. Fully distributed event-triggered time-varying formation control of multi-agent systems subject to mode-switching denial-of-service attacks. Appl Math Comput2022; 414: 126645.
5.
ZhouSHuaYDongX, et al. Time-varying output formationtracking of heterogeneous multi-agent systems with time-varying delays and switching topologies. Meas Control2021; 54(9–10): 1371–1382.
6.
HanLXieYLiX, et al. Time-varying group formation tracking control for second-order multi-agent systems with communication delays and multiple leaders. J Franklin Inst2020; 357(14): 9761–9780.
7.
JiangWWangCMengY. Fully distributed time-varying formation tracking control of linear multi-agent systems with input delay and disturbances. Syst Control Lett2020; 146: 104814.
8.
JiaRZongX. Time-varying formation control of linear multiagent systems with time delays and multiplicative noises. Int J Robust Nonlinear Control2021; 31(18): 9008–9025.
9.
MichielsWMorărescuCINiculescuSI. Consensus problems with distributed delays, with application to traffic flow models. SIAM J Control Optim2009; 48(1): 77–101.
10.
CulshawRVRuanSWebbG. A mathematical model of cell-to-cell spread of HIV-1 that includes a time delay. J Math Biol2003; 46(5): 425–444.
11.
AtayFM. Distributed delays facilitate amplitude death of coupled oscillators. Phys Rev Lett2003; 91(9): 094101.
12.
JessopRCampbellSA. Approximating the stability region of a neural network with a general distribution of delays. Neural Netw2010; 23(10): 1187–1201.
13.
XuXLiuLFengG. Consensus of single integrator multi-agent systems with distributed infinite transmission delays. In: 2018 Annual American control conference (ACC), Wisconsin Center, Milwaukee, WI, USA, 27–29 June 2018, pp.1653–1658.
14.
XuXLiuLFengG. Consensus of linear multiagent systems with distributed infinite transmission delays: a low gain approach. IEEE Trans Automat Contr2020; 65(2): 809–816.
15.
BiCXuXLiuL, et al. Output containment control of heterogeneous linear multiagent systems with unbounded distributed transmission delays. IEEE Trans Cybern2022; 52(8): 8157–8166.
16.
BiCXuXLiuL, et al. Robust cooperative output regulation of heterogeneous uncertain linear multiagent systems with unbounded distributed transmission delays. IEEE Trans Automat Contr2022; 67(3): 1371–1383.
17.
BiCXuXLiuL, et al. Formation-containment tracking for heterogeneous linear multiagent systems under unbounded distributed transmission delays. IEEE Trans Control Netw Syst2023; 10(2): 822–833.
18.
DengYZhuW. Event-triggered leader-following formation control of general linear multi-agent systems with distributed infinite input time delays. Nonlinear Anal Model Control2023; 28(4): 1–20.
19.
ParkBSYooSJ. Adaptive-observer-based formation tracking of networked uncertain underactuated surface vessels with connectivity preservation and collision avoidance. J Franklin Inst2019; 356: 7947–7966.
20.
ZhangGWangYWangJ, et al. Disturbance observer–based super-twisting sliding mode control for formation tracking of multi-agent mobile robots. Meas Control2020; 53(5-6): 908–921.
21.
XiongTGuZYiJ, et al. Fixed-time adaptive observer-based time-varying formation control for multi-agent systems with directed topologies. Neurocomputing2021; 463: 483–494.
22.
GongXCuiYShenJ, et al. Necessary and sufficient conditions of formation-containment control of high-order multiagent systems with observer-type protocols. IEEE Trans Cybern2022; 52(7): 7002–7016.
23.
ZhaoYDuanZWenG, et al. Distributed finite-time tracking control for multi-agent systems: an observer-based approach. Syst Control Lett2013; 62(1): 22–28.
24.
LiMMaQZhouC, et al. Distributed time-varying group formation control for generic linear systems with observer-based protocols. Neurocomputing2020; 397: 244–252.
25.
YooSJParkBS. Distributed adaptive formation tracking using quantized feedback communication for networked mobile robots with unknown wheel slippage. Nonlinear Anal Hybrid Syst2023; 47: 101294.
ZhengHYuNZhuW. Quasi-synchronization of drive-response systems with parameter mismatch via event-triggered impulsive control. Neural Netw2023; 161: 1–8.
28.
GeXHanQLDingL, et al. Dynamic event-triggered distributed coordination control and its applications: a survey of trends and techniques. IEEE Trans Syst Man Cybern Syst2020; 50(9): 3112–3125.
29.
SongWFengJZhangH, et al. Dynamic event-triggered formation control for heterogeneous multiagent systems with nonautonomous leader agent. IEEE Trans Neural Netw Learn Syst2023; 34: 9685–9699.
30.
TangFWangHChangXH, et al. Dynamic event-triggered control for discrete-time nonlinear Markov jump systems using policy iteration-based adaptive dynamic programming. Nonlinear Anal Hybrid Syst2023; 49: 101338.
31.
ZhuWCaoWYanM, et al. Event-triggered formation control of multiagent systems with linear continuous-time dynamic models. IEEE Trans Syst Man Cybern Syst2022; 52(10): 6235–6245.
32.
ZhangHLiWZhangJ, et al. Fully distributed dynamic event-triggered bipartite formation tracking for multiagent systems with multiple nonautonomous leaders. IEEE Trans Neural Netw Learn Syst2023; 34: 7453–7466.
33.
ZhuGLiuKGuH, et al. Observer-based event-triggered formation control of multi-agent systems with switching directed topologies. IEEE Trans Circuits Syst I Regul Pap2022; 69(3): 1323–1332.
34.
MengCZhangWDuX. Finite-time extended state observer based collision-free leaderless formation control of multiple AUVs via event-triggered control. Ocean Eng2023; 268: 113605.
35.
XuPXieGTaoJ, et al. Observer-based event-triggered circle formation control for first- and second-order multiagent systems. Complexity2020; 2020: 1–12.
36.
HuangKZhuW. Observer-based event-triggered time-varying formation control of linear multi-agent systems. In: 2022 China automation congress (CAC), Xiamen, China, 25–27 November 2022, pp.5059–5064.
37.
ChaiXLiuJYuY, et al. Observer-based self-triggered control for time-varying formation of multi-agent systems. Sci China Inf Sci2021; 64(3): 132205.
38.
LiXDongXLiQ, et al. Event-triggered time-varying formation control for general linear multi-agent systems. J Franklin Inst2019; 356(17): 10179–10195.
39.
ZhuWCaoWJiangZP. Distributed event-triggered formation control of multiagent systems via complex-valued Laplacian. IEEE Trans Cybern2021; 51(4): 2178–2187.