
Abstract
We investigate the event-triggered tracking control of networked manipulator in the presence of external disturbance and a variety of system uncertainties. The event-triggered controller is designed by the nonlinear disturbance observer–based control approach, which can dynamically compensate for both errors caused by disturbances and the undesirable effects caused by event-triggering rules. A rigorous Lyapunov stability analysis method is proposed to show that the boundedness of all the signals in the closed-loop system can be guaranteed while in the absence of the input-to-state stability assumption related to measurement errors, tracking error can be constrained to an arbitrarily small set without escaping. Finally, by some simulation results, the feasibility and effectiveness of the proposed control approach is demonstrated.
Keywords
Introduction
Research on robot manipulators has received sustained attention in the field of control due to its important role in industrial applications such as advanced medical, and space and defense.1–3 Meanwhile, control system is often realized through network in today’s research due to their advantages in terms of flexibility and cost.4–7 Therefore, some research results of the network robot have been published successfully. But the burden of signal receiving and transmission may be heavy, which may affect the performance of the robot.3,8
With the development of digitization, event-triggered control has been crucial due to resource constraints in networked control systems, such as limited computational power and communication bandwidth, as well as restricted energy resources.9,10 Its control mechanism is that control tasks are performed only when it is really necessary to ensure the stability and performance of the system.11,12 Motivated by the above-mentioned realities, varying inter-event times are required for a control scheme in order to guarantee the execution of the control tasks. This makes up for the defect of time-triggered control in resource utilization and so on.12–16 Several effective event-triggering mechanisms are proposed and applied in Liu and Jiang, 17 Xing et al.,18,19 Donkers and Heemels, 20 Borgers and Heemels 21 and the references therein. However, for most related research works, stability results are ensured only if the measurement errors meet the corresponding input-to-state stability (ISS) condition, which is usually impossible to satisfy for the systems with external disturbances.13,17 Although the resent results18,19 achieve the robust stabilization for uncertain nonlinear systems via event-triggered input, and eliminate the ISS assumption depending on measurement error, external disturbances and time-varying uncertainties make these design strategies invalid. Considering the complexity in practical application, robot manipulators are influenced by external disturbances, as well as a variety of system uncertainties, such as control coefficient uncertainty, parametric perturbations, as well as other static structured/unstructured modeling errors.22,23 As a result, how to handle time-varying external disturbances and a variety of system uncertainties for robot manipulators, as well as relaxing the ISS assumptions remains to be overcome within the framework of event-triggered control.
The control objective of the paper is to guarantee the tracking of given reference signal by robot manipulators subject to time-varying external disturbances and uncertainties using a event-triggered controller, while reducing the usage of the communication channel by limiting the amount of control input updates. Based on the fixed threshold strategy given in Xing et al.,18,19 an event-triggered controller is proposed to overcome the aforementioned objective. In the proposed event-triggering mechanism, the control signal is transmitted via communication network only when a predetermined lower threshold that depending on the control signal has been reached. Moreover, without the ISS assumption depending on the measurement errors, the nonlinear disturbance observer–based control (DOBC) approach24–27 is applied to effectively estimate the total disturbance. By the proposed disturbance observer–based event-triggered control method, it is shown that the global boundedness of the signals in closed-loop system is guaranteed, and the tracking error is ensured to converge to a set, which can be made as small as desired by adjusting control parameters. The major innovations or difficulties of the proposed control design in this paper are twofold as follows:
Only the observer gain needs to be adjusted in order to ensure a desired tracking error, meanwhile the transmission efficiency is increased;
By the virtue of the technique of DOBC, the negative impacts of the lumped disturbance and the measurement errors can be attenuated in the framework of event-triggered control without ISS assumption.
The remainder of this paper is organized as follows. Necessary preliminaries and the problem formulation are provided in section “Preliminaries and problem formulation.” Section “Main results” gives the event-triggered control design for networked manipulator and the resulting closed-loop system rigorously analyzed. The effectiveness of the proposed method is demonstrated by a numerical simulation in section “Simulation examples.” Section “Conclusion” concludes the paper.
Preliminaries and problem formulation
Preliminaries
Now, we give the following preliminary lemmas which are necessary in our design.
Lemma 1
For given

for all
Lemma 2
For given
Lemma 3
For any

Problem formulation
Now, we consider the following dynamics of networked robot manipulator

where the angle
As the system parameters
With the help of the following coordinate transformations

where
The control objective is to construct an appropriate event-triggered controller without any ISS assumptions such that the global boundedness of the signals in closed-loop system is guaranteed, and the output signal
Assumption 1
The lumped disturbance
Remark 1
The lumped disturbance
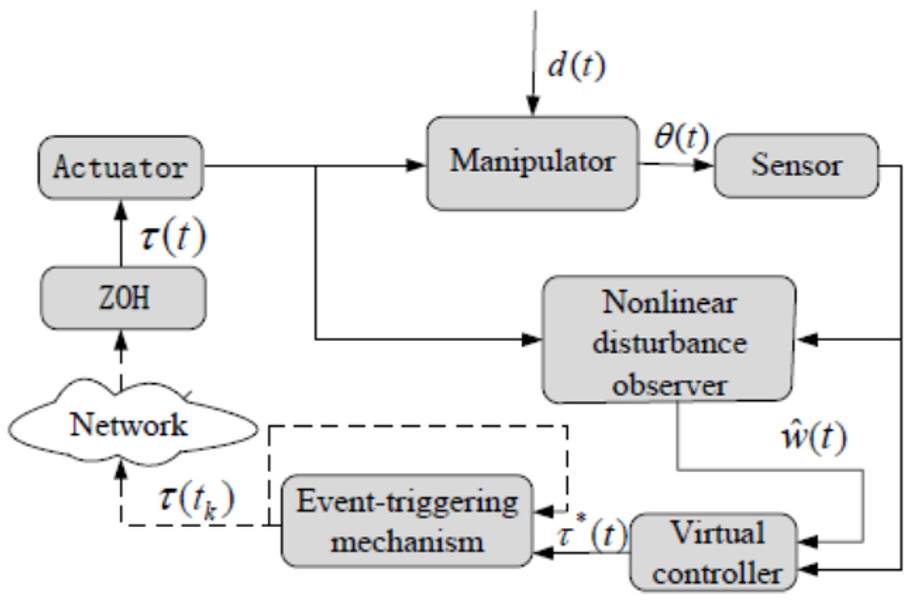
Event-triggered control schematic.
In the proposed control method, the DOBC is first designed to estimate the disturbances. In order to save the communication resource, the controller is transmitted only when the event-triggering mechanism is triggered.
Main results
Event-triggered control design via DOBC
In this part, a disturbance estimator is designed below to estimate the lumped uncertainties

where

Furthermore, let us assume that


where the continuous signal
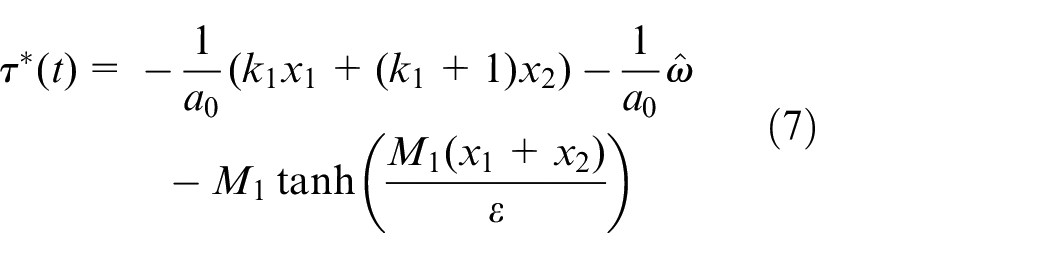
and
Stability analysis
In the following, the stability performance of the closed-loop system (equations (2)–(3)–(5)–(6)) is summarized in Theorem 1.
Theorem 1
For system (equation (1)) satisfying Assumptions 1, the disturbance estimator (equation (3)), and the fixed control strategy (equations (5)–(7)), there exists a suitable observer gain
All the closed-loop signals are bounded, and the tracking error
There is a positive constant
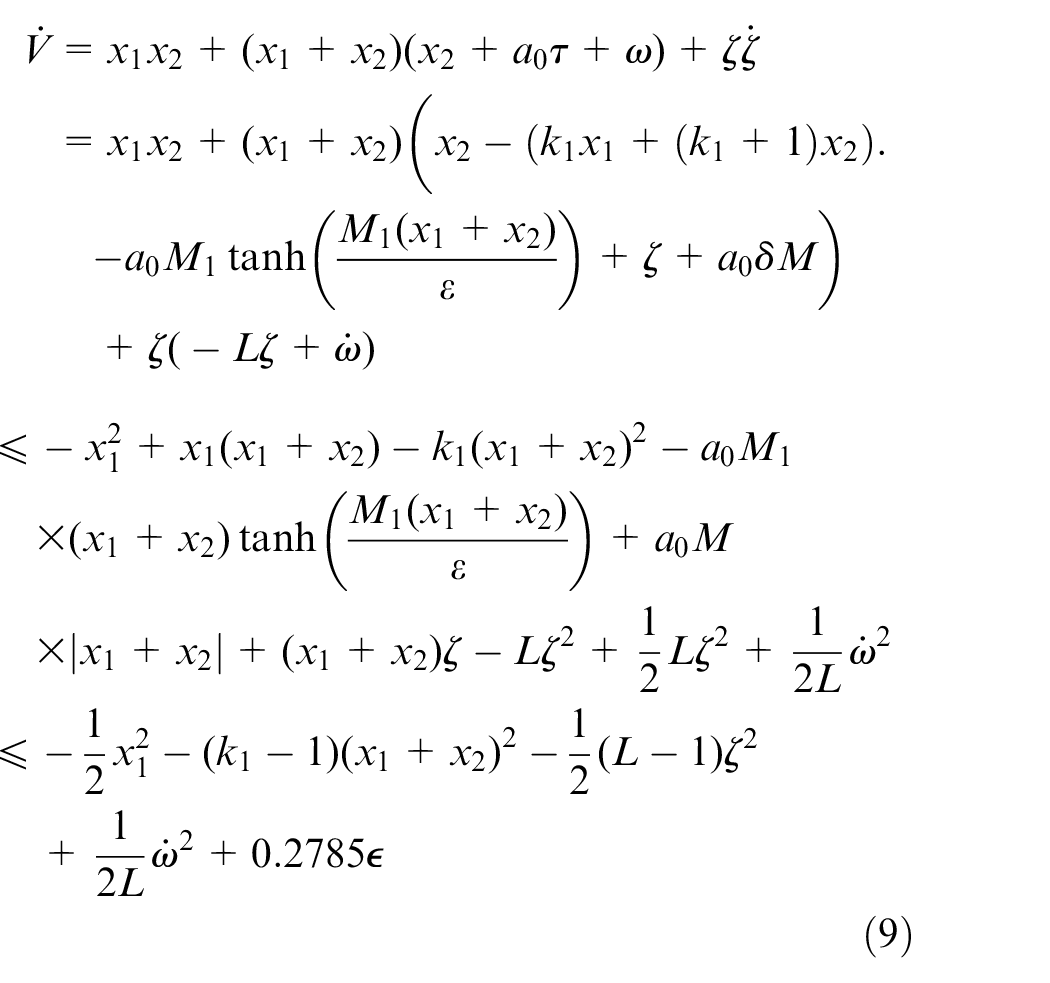
Proof
1. It follows from equation (6), that there is a function

Define a Lyapunov function
Based on the above process, one can select

Then, it follows from equation (10) that

Therefore

which implies

By equation (13), one gets that
Moreover, from equation (13), we get that
2. Since the continuity and differentiability of

which implies
Remark 2
A design of event-triggered control for nonlinear system (equation (1)) together with rigorous theoretical analysis is presented in this section. It is worthy pointing out that most existing results, such as Xing et al.,18,19 can only ensure that the tracking errors converge to a finite set and this set is fixed or adjustable by virtue of complicated calculations of the design parameters. In this paper, by means of the nonlinear DOBC approach, we can realize control target that the tracking error converges toward an arbitrarily small set by only adjusting the value of
Remark 3
It is worth mentioning that the nonlinearity estimator (equation (3)) is the key to compensate for the lumped disturbance
Remark 4
The effects of the controller parameters on control precision and the triggering frequency of control action are summarized based on the following: (1) the greater the value of
Simulation examples
In this section, we show the simulation results on the single-link robot manipulator. In order to demonstrate the effectiveness of the proposed event-triggered control approach, we also take another simulation case into account where the estimation and compensation of the lumped disturbance is not considered (we define this method as ETM without compensation).
The event-triggered continuous control signal without disturbance compensation becomes
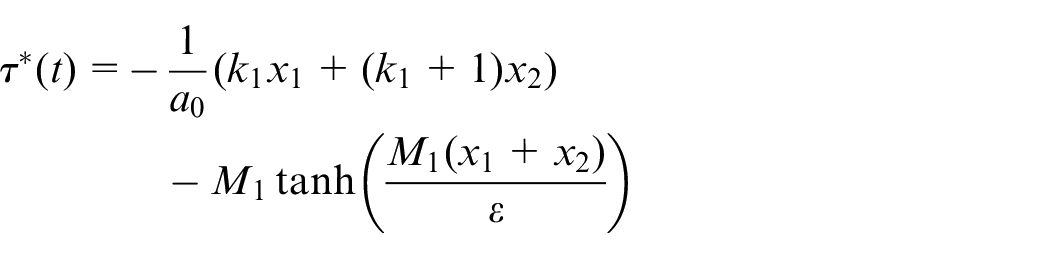
where
We choose the nominal values of the parameters in system (equation (1)) as follows:


In the simulations, the selection of the design parameters
Under the two different control methods, the response curves of the tracking errors are depicted in Figure 2. From Figure 2, we can see that the control design in this paper can achieve the desired tracking control performance, but without disturbance observer compensating disturbances, the tracking error is quite unsatisfactory. Figure 3 shows the tracking performance of angle
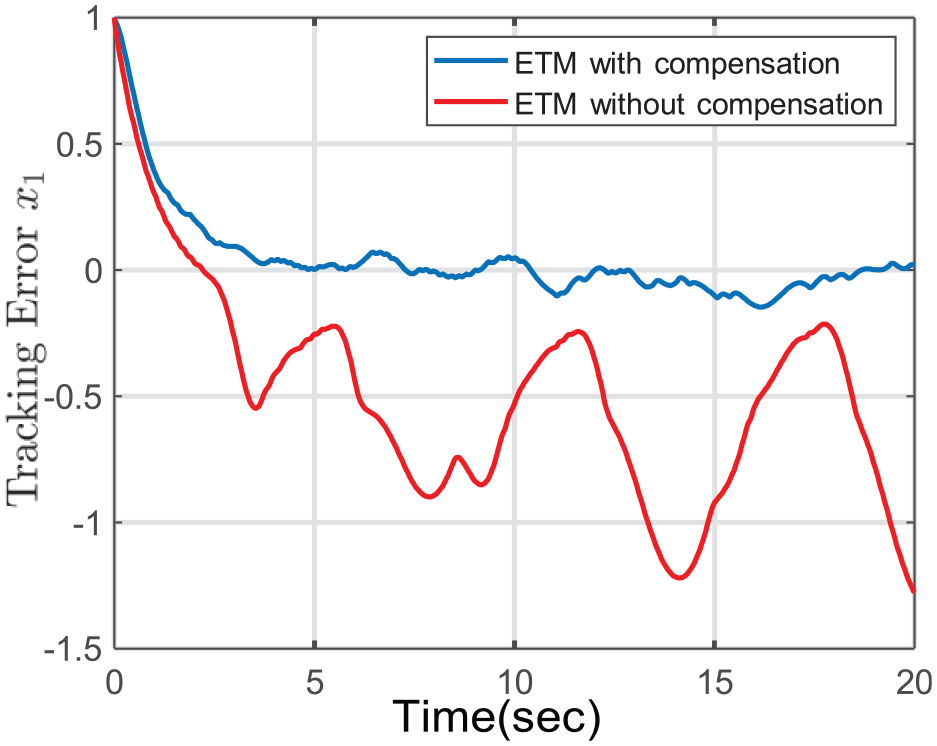
The trajectories of tracking error
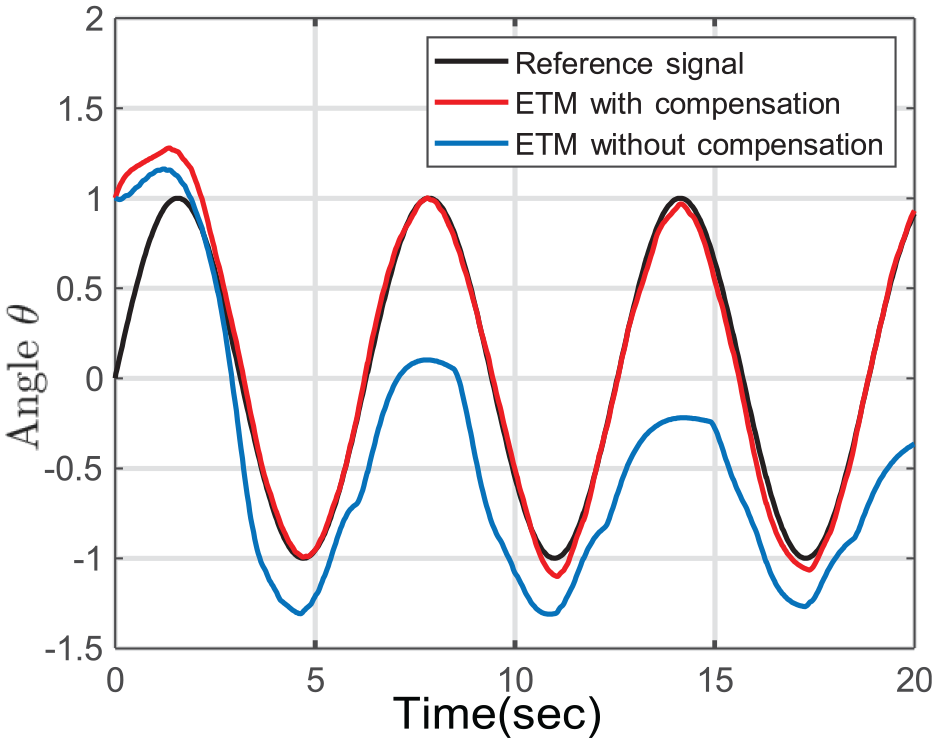
The trajectories of reference signal
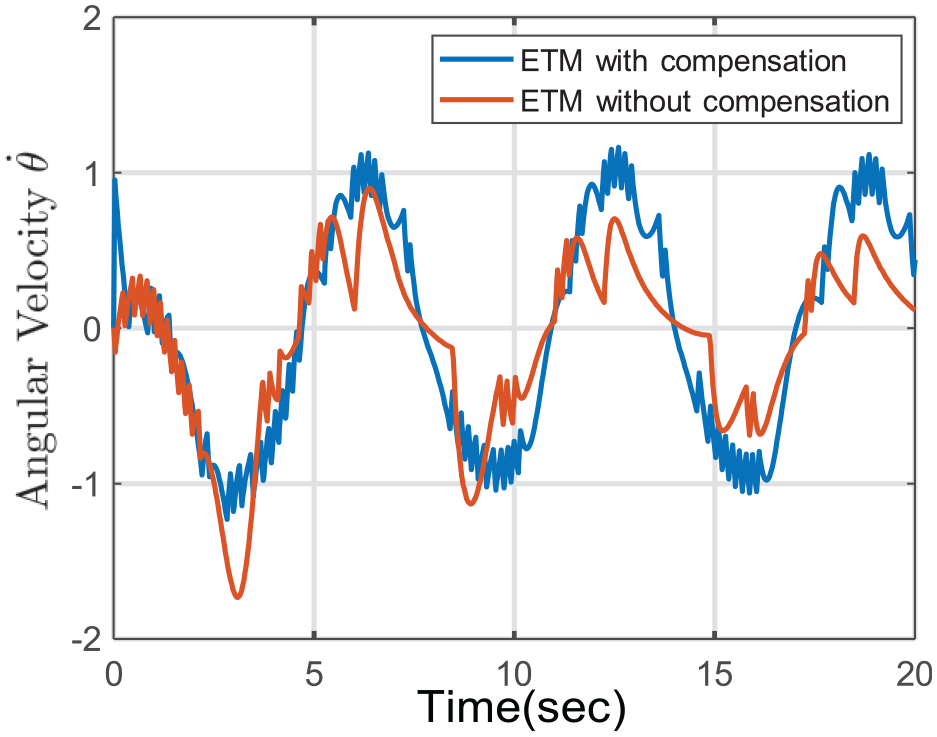
The trajectories of angular velocity
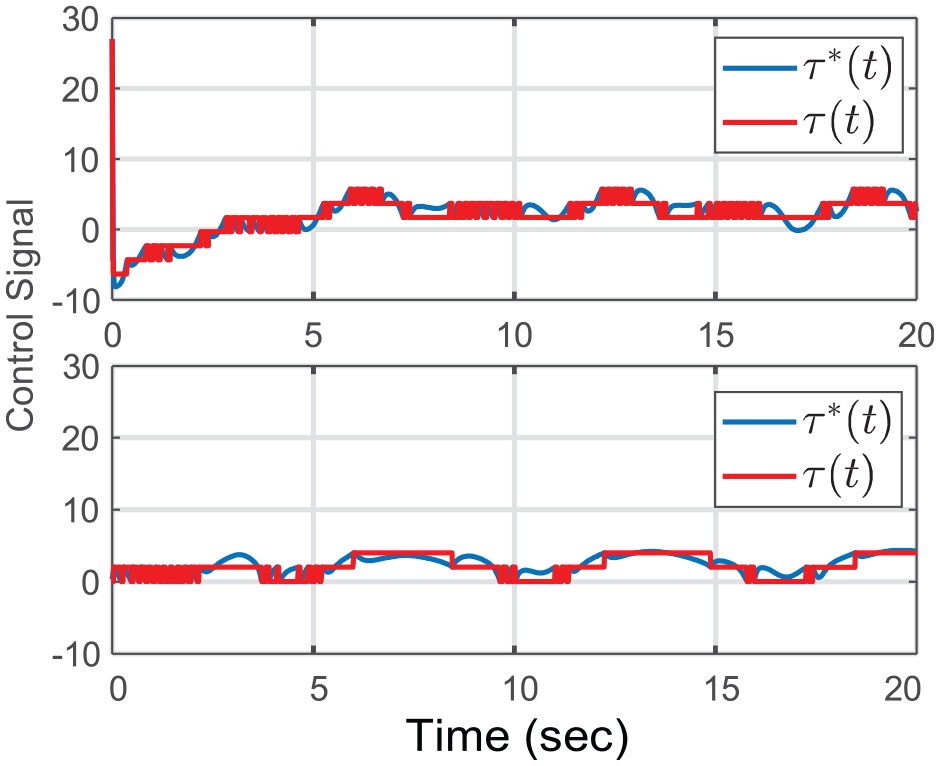
The trajectories of control signal.
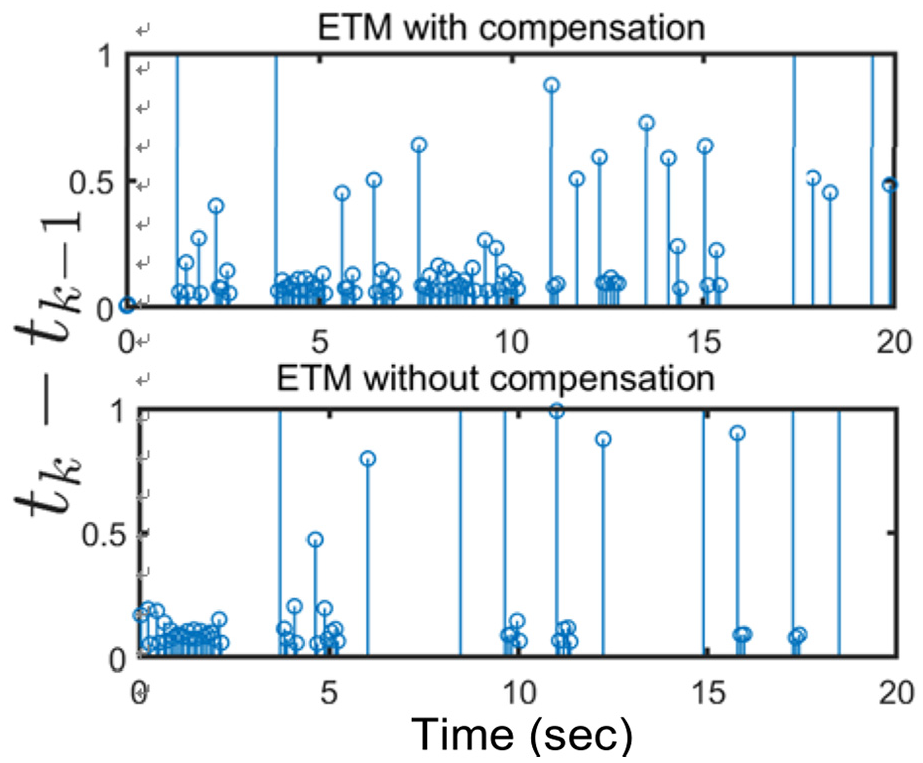
Time interval of triggering event.
Conclusion
Robust tracking control with event-triggered input for networked manipulator in the presence of external disturbance and a variety of system uncertainties is investigated in this paper. Moreover, the ISS assumption depending on measurement errors is removed in the control design. Based on DOBC technique, a nonlinear disturbance observer–based event-triggered controller is proposed to dynamically compensate for measurement error and the lumped disturbances of the considered system. The desired control performances of the presented event-triggered control design have been successfully verified by the Lyapunov analysis method and further illustrated by simulation example. Based on the existence of measurement noise and time-delay for every physical system, the effect of these conditions should be further researched in the analysis of both the control properties and the computation properties of the system.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The work was supported in part by National Nature Science Foundation of China (61973080 and 61603160).