
Abstract
Aiming at the problem of mode aliasing in the adaptive decomposition of nonlinear and non-stationary current signals generated by three-phase asynchronous motor faults, and the fault features contained in signals collected by a single sensor can not be accurately and comprehensively extracted and characterized when early rotor bar breakage and air gap eccentricity faults occur, A fault diagnosis method for three-phase asynchronous motor based on noise assisted multivariate empirical mode decomposition (NA-MEMD) and mutual information is proposed. Firstly, the NA-MEMD algorithm is used to decompose the three-phase stator current signal of the asynchronous motor to obtain multi-scale intrinsic mode functions (IMFs). Then, the correlation algorithm is used to screen the IMFs containing useful information. Then, the filtered IMF components are reconstructed into new signals and their features are extracted, Finally, support vector machines (SVM) are used to identify the rotor broken bars and air gap eccentric faults of the three-phase asynchronous motor. The experimental results show that the NA-MEMD method has a higher recognition rate than the traditional empirical mode decomposition (EMD) and the ensemble empirical mode decomposition (EEMD) methods.
Keywords
Introduction
In industrial production, the three-phase asynchronous motor is widely used in transmitting material devices, therefore the reliability of the control circuit, and security is particularly important in the production process. But due to the particularity of industrial requirements, an asynchronous motor is in a bad environment and abnormal use cases will accelerate the aging of the motor, 1 bringing unexpected harm industry-al production process. So for the motor reliably detecting state has very important practical significance.
Article break fault occurs in the early days the conducting bar or the end of the motor rotor ring fracture and broken article for motor rotor vibration gradually out of the trough, and lead to the rotor broken bar broken stator winding insulation fault, such failures in the stator current causes a large number of harmonics, the harmonic can cause motor loss was increased, the vibration and noise, the local temperature, increasing the motor aging leads to greatly reduce the life of a, seriously affected the industrial production process. The same air-gap eccentric rotor can disrupt the motor’s internal stable magnetic field and the air gap size, air gap magnetic field changes at the same time, the radial electromagnetic force will change with the changing of the internal magnetic field, produced by unbalanced magnetic pull. This force causes the motor noise and vibration, severe cases can make the stator, and rotor produces friction and even touch, the damage to the motor is irreversible, under a state of electric opportunities for the safe operation of industrial and normal production and cause a potential safety hazard and incalculable economic losses, so for motor rotor fault monitoring is particularly important. Traditional fault feature extraction process is based on Fourier Transform, 2 wavelet Transform and the EMD method of three-phase asynchronous motor stator current characteristics after extracting time-frequency Transform, 3 Fourier analysis has limitations in the non-stationary signal, wavelet Transform as an alternative method, Fourier Transform in time-frequency performance advantage is obvious and is widely used, but wavelet Transform for basis function has a very strong dependence on the optimal selection, selection of basis function also to have certain difficulties. 4 Therefore put forward the empirical mode decomposition in the 1980s, 5 but the EMD has two problems: one is can only handle one yuan time series, will not be able to deal with multivariate time series at the same time, and the number of the IMF is not fixed; Second, for complex data, data intermittently in the time-frequency domain not only caused the severity of modal aliasing, 6 and the physical significance of the individual IMF component is not clear. So someone in 2010 classic EMD algorithm was improved and the proposed multivariable empirical mode decomposition, 7 while it is possible for the Multivariate data decomposition, there is still a modal aliasing problem, to solve the problem, in this paper, based on the method of NA-MEMD decomposition of the stator current, this method can not only reduce the modal aliasing phenomenon, at the same time can be multiple current signals multi-scale decomposition, multiple collection and processing for the fault signal extracted more fault information, realize the comprehensive fault analysis. 8
In this paper, we utilize the Nonlocal average technique for multi-channel processing. 9 The stator current signal is first subjected to de-noising pretreatment using NA-MEMD. Subsequently, the signal is decomposed into IMF components based on their number and frequency width. We selectively retain the useful information contained in the IMF components by assessing their mutual information and prior knowledge. This results in the formation of a new signal that is reconstructed for feature extraction. Finally, we utilize SVM for eccentric rotor broken bar and crack fault classification. This process is repeated to achieve stable and reliable results, thus validating the effectiveness of our proposed method.
Based on the NA-MEMD and cross-correlation feature extraction method
The EMD method decomposes the original signal into various scales of IMF components and a surplus. As this method is primarily a screening process, it inevitably produces the modal aliasing phenomenon. 10 Additionally, since EMD is a one-dimensional signal processing method, it tends to exhibit characteristics of multiple signals containing an adequate amount of information.
The NA-MEMD method is based on the EMD algorithm and involves decomposing multi-channel signals into multiple sets of IMF components. 11 These components are grouped based on their frequency range and representation, which solves the problem of arranging multiple signals. However, there can still be some modal aliasing when calculating the average envelope through direction projection in a super sphere. To address this, a binary filter set was developed for the MEMD method that includes adding a white Gaussian noise channel as an auxiliary channel to ensure IMF separability. 12 The specific steps for applying the NA-MEMD method to multiple original signals are as follows:
1. Suppose you have an yuan the original signal:

Generate an s-channel is the same as the length of the original signal and gaussian white noise signal:

The noise signal is added to the original signal to form a v(n+s)-channel multivariate signal:

2. On a sphere, select
3. Calculate the projection of signal
4. Obtain the instantaneous time
5. For K direction vectors, estimate the mean value
6. Calculate the value of h(t)=z(t)−m(t), If h(t) meets the stop condition of the multivariate IMF, the result of v(t)−h(t) is taken as the input and substituted into the iterative calculation in steps 2–6, If the conditions are not met, continue the above iterative calculation with h(t) as the input, The final signal z(t) can be decomposed into:

Where l represents the order of the multiple IMF,
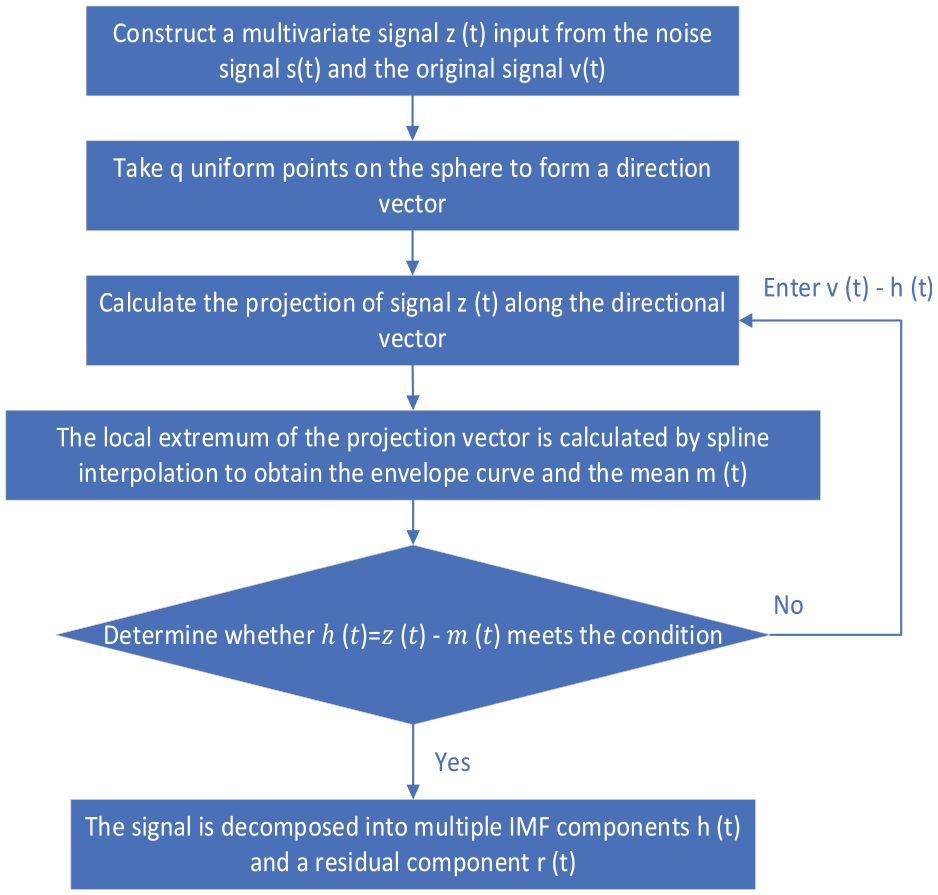
NA-MEMD algorithm flowchart.
When assessing the correlation between two random variables, information entropy and energy entropy are commonly utilized. In this paper, mutual information is used as an extension of information entropy to measure the correlation between the original current and IMF components.13,14 While mutual information is not as strong as the Pearson correlation coefficient for linear signals, it is more accurate for nonlinear signals.
15
Therefore, the entropy of the original signal is defined as



Where

The value of

The larger the
SVM feature extraction
In this paper, the SVM algorithm is utilized to classify rotor broken bars and air gap eccentric faults based on input features. This approach is effective in solving practical issues such as high dimensions and small sample sizes, and has been widely applied in classifying motor fault signals. Essentially, SVM maps low-dimensional vectors in the feature space to high-dimensional spaces via functions, and by defining an optimal linear hyperplane, nonlinear points can be made linearly separable. 17 The process of seeking the optimal hyperplane is equivalent to finding the optimal solution, and this involves two parameters penalty factor c and kernel parameter g that greatly influence SVM classification performance. As different parameter combinations will yield varying classification capabilities, selecting the most appropriate parameter group via an optimization process is crucial in achieving the best or near-best classification accuracy for SVM.
Troubleshooting steps
Using the NA-MEMD method, we are able to extract fault features from the current of three-phase asynchronous motors. Initially, we utilize a Hall current sensor to collect the motor stator current signal, then apply NLM to reduce any noise present in the signal. NA-MEMD is then used to decompose the noise-reduced signal, resulting in multiple groups of IMF components. We use mutual information R to select the IMF components containing the most effective components and reconstruct a new signal. Finally, we perform feature extraction and classification on the signal and input the SVM training model for classification testing. Our results indicate that this method is effective and stable. Please refer to Figure 2 for the process diagnosis method.
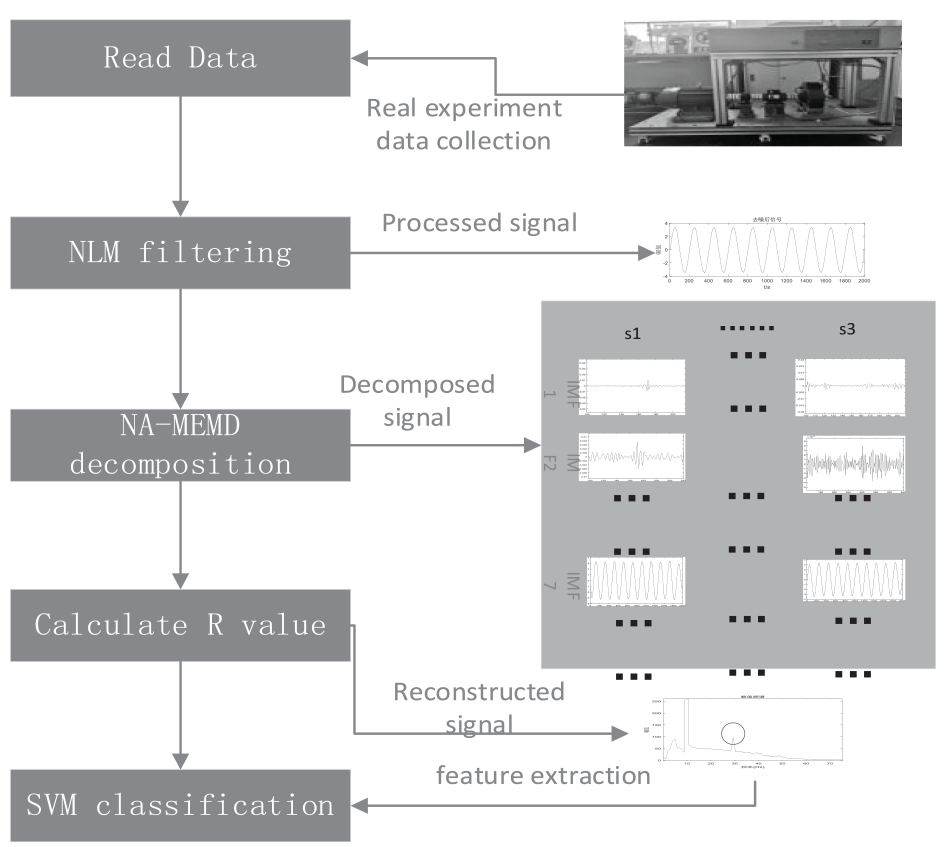
Steps of motor fault diagnosis based on NA-MEMD method.
Experimental platform design
The motor used in the experiment is a 4-pole YE3-100L2 asynchronous motor, with a rated voltage of 380 V, a rated power of 3 kW and a rated speed of 1420 r/min. In order to truly simulate the broken bar fault, the guide bar drilling hole was artificially disconnected during the rotor production process (the aperture diameter is 0.8 cm). Expand the inner ring of the motor bearing cap by 5 mm and control the position of the bearing cap with four bolts to simulate an eccentric fault when the position of the bearing cap changes. In addition, in order to ensure that a new fault type will not be introduced, a dynamic balance experiment was conducted on the motor to rule out the possible interference caused by the rotor eccentric fault on the broken bar fault detection in the subsequent experiment.
Validation of experimental data
In this paper, the NA-MEMD method is used to decompose the measured motor data. As a multivariate decomposition method, the complexity of the algorithm has always been the focus of attention in the experiment. With the increase of the dimension, the calculation amount generated by the NA-MEMD decomposition increases significantly. Considering that the characteristic information contained in the stator current signal is more abundant and obvious than the external signal, Combined with the complexity of the algorithm, a three-phase stator current is used as the input of multiple signals for rotor fault identification. In this paper, the NA-MEMD method is used to decompose the measured motor data. As a multivariate decomposition method, the complexity of the algorithm has always been the focus of attention in the experiment. With the increase of the dimension, the calculation amount generated by the NA-MEMD decomposition increases significantly. Considering that the characteristic information contained in the stator current signal is more abundant and obvious than the external signal, Combined with the complexity of the algorithm, a three-phase stator current is used as the input of multiple signals for rotor fault identification.
Based on NA-MEMD decomposition
The measured data used in this paper take the rotor broken bar fault as an example. Because the measured data contains a lot of noise, the stator current signal is first preprocessed with NLM, and three groups of IMF components are obtained after decomposition. Because some IMF components after decomposition have more burrs, which may also contain a lot of effective information, it is necessary to use mutual information to judge their relevance, but the residual components with less information can be eliminated first, Reconstruct them into the same component IMF n, as shown in Figure 3.
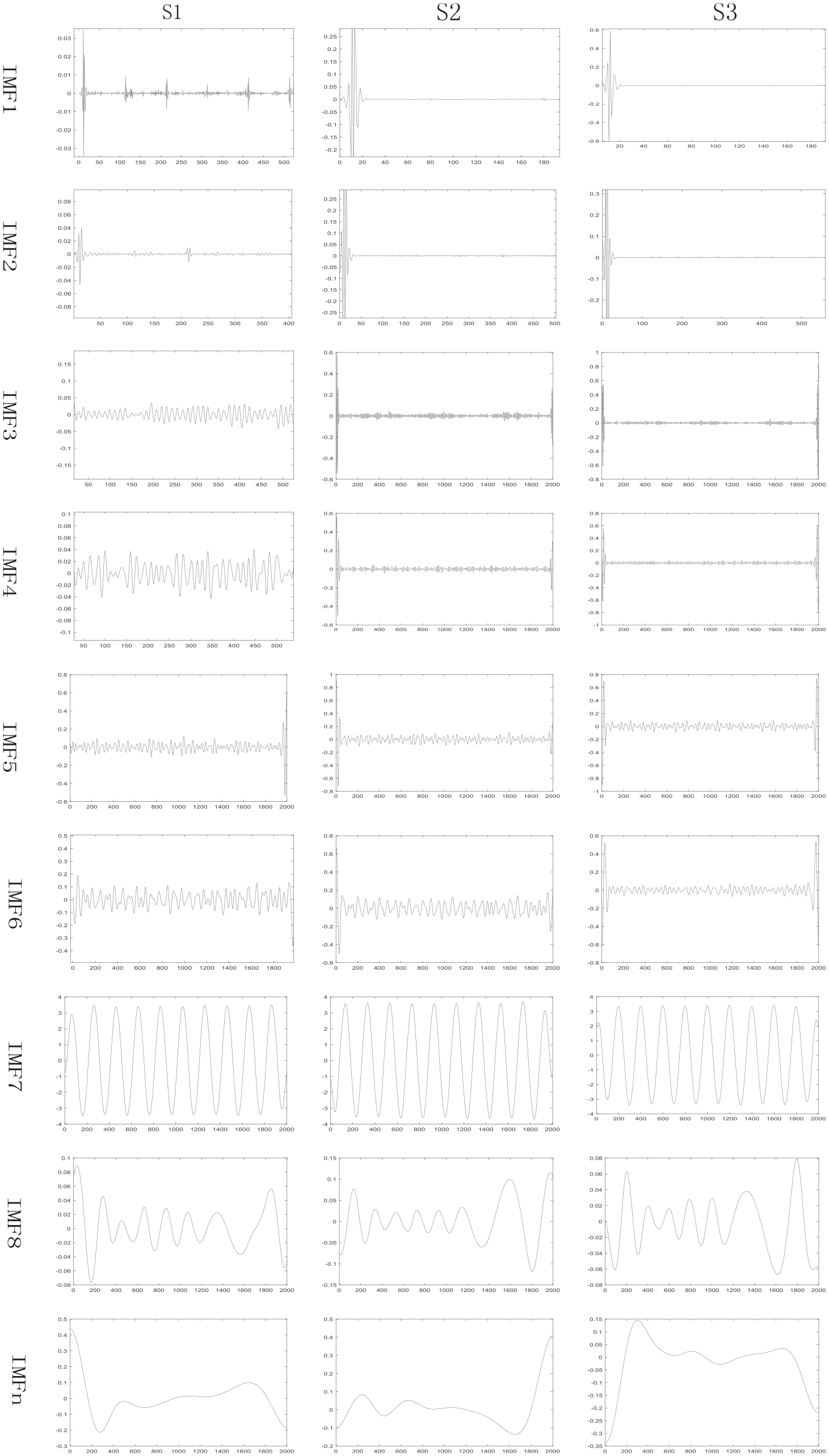
NA-MEMD decomposition of three channel current signal.
It can be seen in Figure 3 that the first seven orders of the decomposed IMF contain more effective information. In addition, the first three order components contain more burrs, which may contain noise and a lot of effective information. Therefore, we can use mutual information to calculate the value of each order component to judge important IMF components.
The decomposed IMF components have obvious fault characteristics after time-frequency transformation, as shown in Figure 4. Therefore, the time-frequency characteristics of the decomposed data can be used as the main features to input classifier for rotor fault identification, which has been verified by many experiments according to the literature. 18
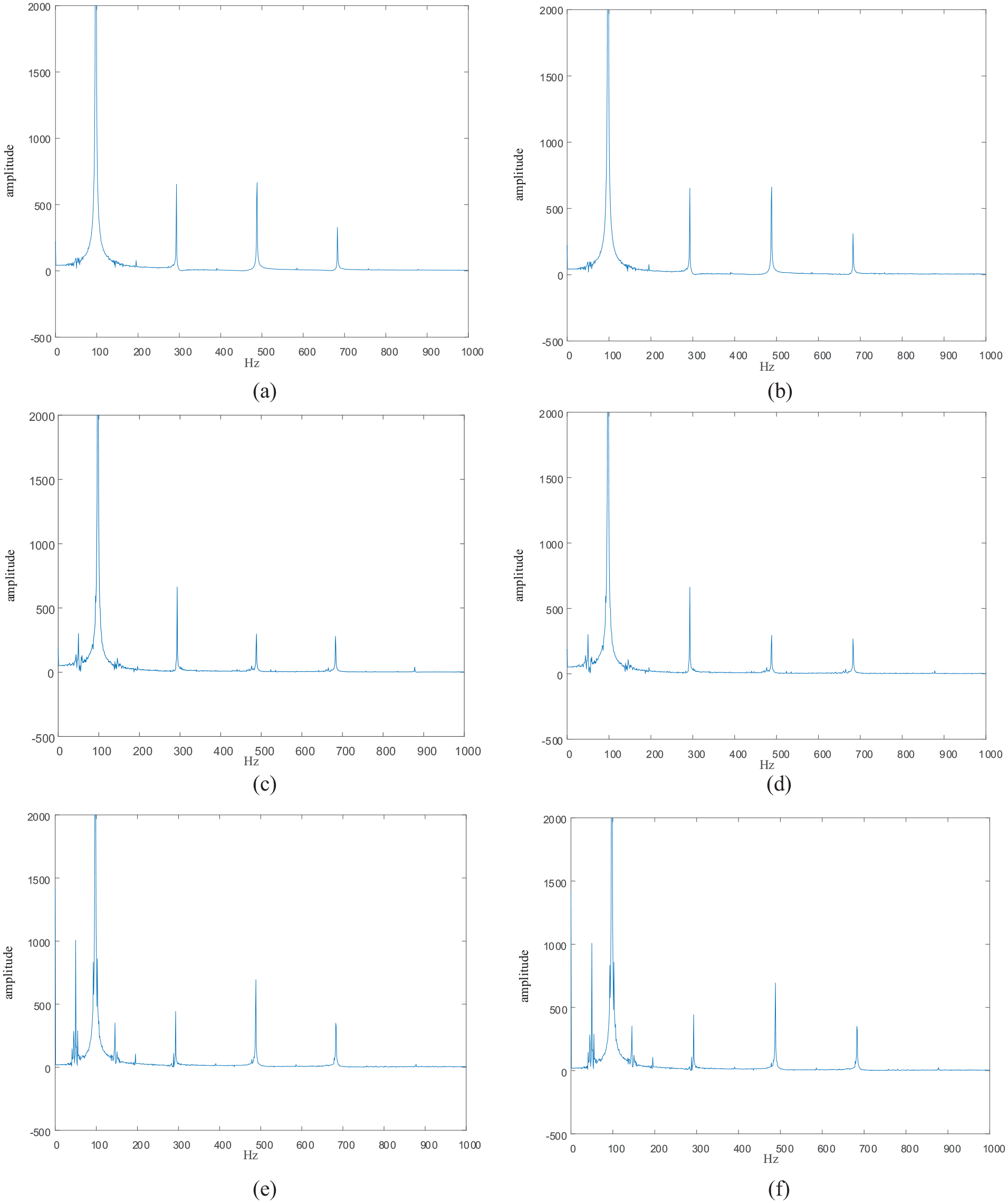
Time-frequency comparison diagram of reconstructed signals with different IMF components of stator current: (a) time-frequency diagram of healthy motor IMF5-7 reconstructed signal, (b) time-frequency diagram of healthy motor IMF3-7 reconstructed signal, (c) time-frequency diagram of reconstructed signal of broken bar faultIMF5-7, (d) time-frequency diagram of reconstructed signal of broken bar fault IMF3-7, (e) time-frequency diagram of reconstructed signal of eccentric fault IMF3-7, and (f) time-frequency diagram of reconstructed signal of eccentric fault IMF5-7.
Calculation of mutual information value
NA-MEMD decomposes multivariate signals to obtain multivariate IMF groups in the same order. It can be seen from Figure 3 that IMF components containing useful information are distributed in the first seven orders. Therefore, the paper only calculates the value of mutual information of the first seven orders in each group. Finally, the average value of mutual information of three groups of IMF is shown in Table 1.
R i value of each order of multivariate IMF group.

The
As can be seen from Figure 4, the IMF3 and IMF4 components of different fault types (b, d, f) have a very weak influence on the frequency domain characteristics in the reconstructed signal. In the envelope spectrum from the decomposition of the IMF component of the stator current signal, the main frequency of all motors is roughly the same. In the fault signal envelope spectrum, the prominent line spectrum component appears at 50 Hz and near its second harmonic, which can clearly reflect the fault state, Therefore, the components IMF5, IMF6, and IMF7 are finally selected as the IMF components containing important information for reconstruction based on the value of the time-frequency comparison diagram and
SVM fault diagnosis
In order to verify whether the time-frequency features of the reconstructed signal can accurately distinguish the various types of faults and the robustness of the method, we evenly mixed all types of data with zero load, 20% load, 60% load and rated load, and input them into the classifier for classification. In this paper, SVM is used to classify the features extracted from the reconstructed signal as input. Before classification, the data are marked with features, including healthy motor as 1, air gap eccentric fault as 2, and rotor broken bar fault as 3. The data are divided into training samples and test samples at a ratio of 7:3, and the two samples are normalized at the same ratio. The two parameters of SVM, penalty factor c and core parameter g, get the best value through cross-validation and predict the test samples through the established SVM classification model. The classification results of the test set are shown in Figure 4: In order to verify whether the time-frequency characteristics of the reconstructed signal can accurately distinguish various types of faults, they are input into the classifier for classification. In this paper, SVM is used to classify the features extracted from the reconstructed signal as input. Before classification, the data are marked with features, including healthy motor as 1, air gap eccentric fault as 2, and rotor broken bar fault as 3. The data are divided into training samples and test samples at a ratio of 7:3, and the two samples are normalized at the same ratio. The two parameters of SVM, penalty factor c and core parameter g, get the best value through cross-validation and predict the test samples through the established SVM classification model. The classification results of the test set are shown in Figure 4.
The results in Figure 5 shows that each fault type is composed of 600 groups of fault features for classification experiments. In each type of fault, 420 groups of data are used for training in the training set, and the remaining 180 groups are used for classification diagnosis in the test set. In order to verify the effectiveness of the NA-MEMD mutual information method, the diagnostic results of the traditional extraction methods EMD + SVM and EEMD + SVM are compared respectively. Figures 6 and 7 show the diagnostic classification results of EMD and EEMD respectively. The results in Figure 5 shows that each fault type is composed of 600 groups of fault features for classification experiments. In each type of fault, 420 groups of data are used for training in the training set, and the remaining 180 groups are used for classification diagnosis in the test set. In order to verify the effectiveness of the NA-MEMD mutual information method, the diagnostic results of the traditional extraction methods EMD + SVM and EEMD + SVM are compared respectively. Figures 6 and 7 show the diagnostic classification results of EMD and EEMD respectively.
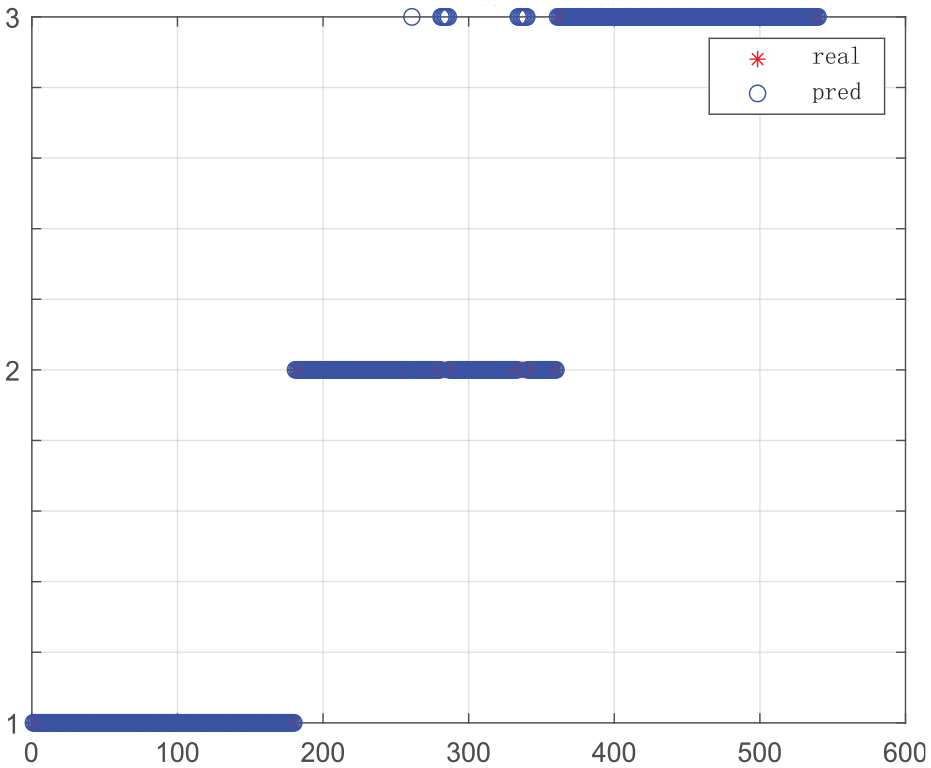
Classification results of NA-MEMD + SVM test set.
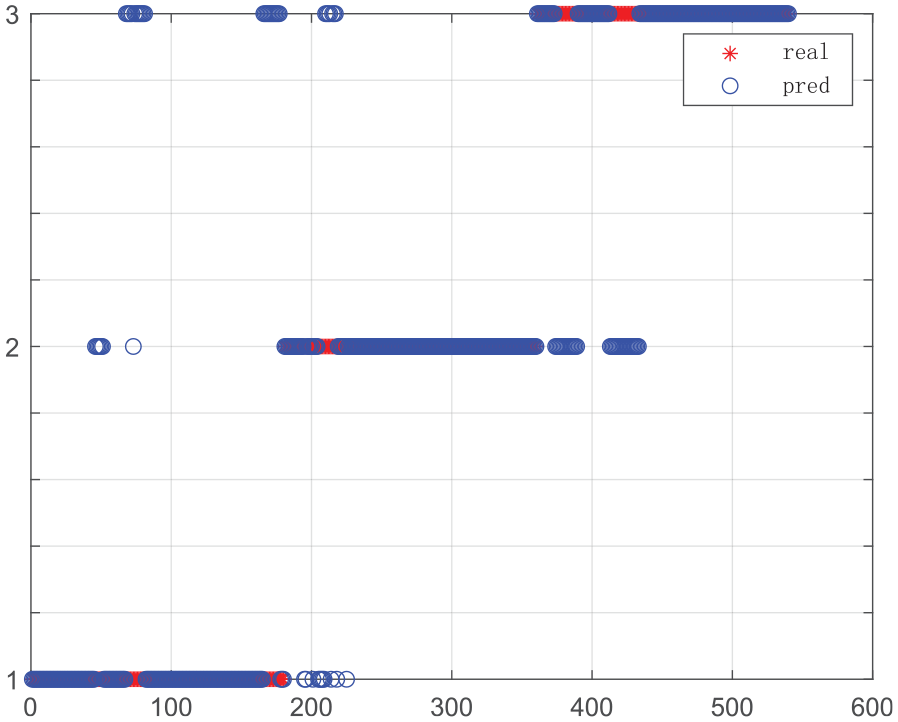
EMD + SVM test set classification results.
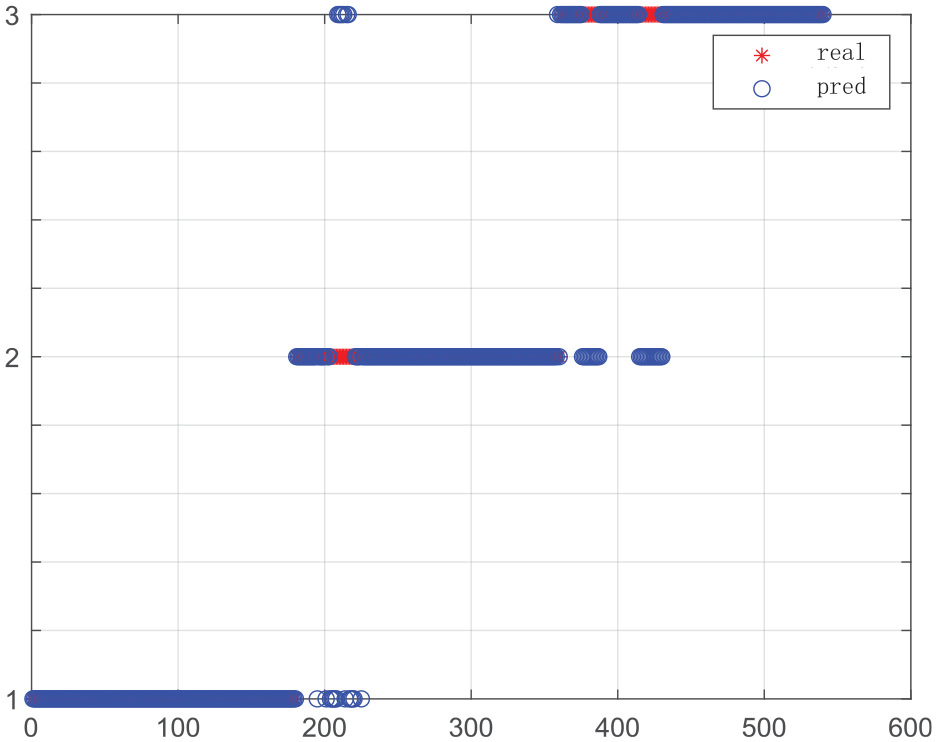
EEMD + SVM test set classification results.
Combined with the results of Figures 4 to 6, the accuracy of these three methods is summarized (Table 2).
Asynchronous motor fault identification results.
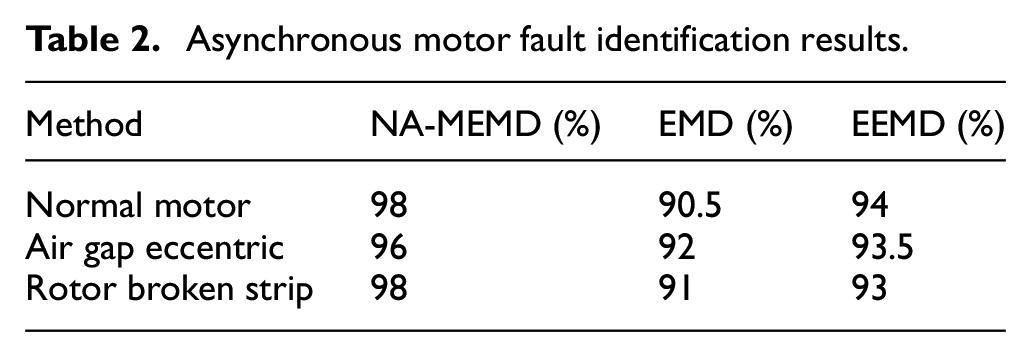
It can be seen that the rotor fault recognition rate of NA-MEMD method is higher than that of EMD and EEMD. For different fault types, the recognition rate of NA-MEMD method is also different, but the recognition rate is above 96%, avoiding the problem of poor single fault recognition rate. Therefore, the proposed method has significantly improved for the diagnosis of rotor fault, which proves the effectiveness and robustness of this method.
Conclusion
This paper proposes a method based on the combination of NA-MEMD and mutual information for the multi-channel, nonlinear, and other characteristics of asynchronous motor stator current. According to the correlation of decomposed components, effective components are extracted and new eigenvectors are constructed. The model is established through training after the eigenvectors are input into SVM. Through actual data verification, The following conclusions are drawn:
NA-MEMD is more accurate, objective and comprehensive than traditional single-channel features.
This method can realize the synchronous adaptive analysis of multi-channel signal, while ensuring that the IMF components corresponding to the decomposed multi-channel letter are the same in number and scale, and avoiding the phenomenon of uncertain scale arrangement of traditional EMD after decomposition.
In this paper, the three-phase current is only taken as a signal, which has a large space for improvement in the rotor break bar fault identification. In the future, vibration, voltage, and other signals can be added to improve the identification accuracy of this method.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.