
Abstract
Rotor unbalance faults are one of the high-frequency faults in rotating machinery. As such, their accurate and timely diagnosis is important. In contrast to traditional methods based on static features, the dynamics features and support vector machines (SVM) are combined for the accurate detection and classification of rotor unbalance faults. First, the dynamical trajectories of the rotor system associated with unbalance faults are accurately identified locally based on the deterministic learning theory, which is more sensitive to abnormal changes in the rotor system. Second, entropy dynamics features, including the sample entropy, fuzzy entropy, and permutation entropy, are extracted based on the obtained dynamical trajectory data. Finally, the dynamics features are used to train the fault classifier based on the SVM with a Gaussian kernel function. Experiments on a rotor unbalance fault test rig demonstrate the effectiveness of the proposed method. The accurate detection and classification of rotor unbalance faults were also achieved compared with the results of employing static time or frequency features.
Introduction
As the key component of rotating machinery, rotor systems are widely used in electric power generation, coal mining, ship, and aerospace equipment. One of the most common faults in rotating machinery is rotor unbalance, which has a significant impact on the efficient and stable operation of rotor systems. 1 Unbalance faults may originate from the rotor manufacturing process, which lead to secondary failures of the rotor system, such as the rub-impact phenomenon and broken rotor bars. 2 Therefore, the accurate detection and classification of rotor unbalance faults is a crucial step in the safe operation of rotating machinery.
Rotor unbalance fault diagnosis has attracted the attention of researchers in recent years. Fault-specific symptom parameters are key elements in rotor fault diagnosis. 1 Several time-frequency feature extraction methods have been proposed for rotor unbalance fault symptom analysis.3–5 Zhou et al. 4 used empirical mode decomposition (EMD) to extract the intrinsic mode to represent the different harmonics. Based on the idea of EMD, Chen et al. 5 proposed the variational mode decomposition method to diagnose the unbalance faults of wind power gearboxes. However, the diagnosis results cannot be obtained based solely on time-domain or frequency-domain features. The quantitative diagnosis results still need to be evaluated by analysts based on their experience or by other methods.6,7 To resolve this issue, machine learning methods combined with fault features have been proposed,8–10 such as support vector machines (SVMs),11,12 K-nearest neighbor, 13 and deep learning. 14 The main processes of these methods are feature selection and fault classification. Among these machine learning methods, SVM has the advantage of high classification performance, and has been widely used in rotor fault diagnosis.15–17 However, the performance of SVM methods is dependent on the fault feature extraction process. 1 The existing time or frequency domain features are static features, while the nonlinear features, for example, sample entropy (SE), fuzzy entropy (FE), and permutation entropy (PE), are obtained based on the status data of rotor systems. 18 Compared with the static features, system dynamics indices are more sensitive to system changes, and can provide a more accurate representation of the original system by including internal dynamics information. 19 The key step in dynamics index extraction is dependent on the locally accurate identification of the system dynamical trajectory based on deterministic learning, which was proposed by Wang and Hill. 20 The main advantage of deterministic learning is that the system dynamical trajectory can be approximated by radial basis function (RBF) neural networks, in which the neural weights converge in a stable manner. Therefore, the identified trajectory in a dynamical system can be stored in constant neural networks for further feature extraction. The dynamical system trajectory has been applied in the fault diagnosis and pattern recognition of small abrupt and incipient faults, electrocardiogram signals, and the human gait.21–23
Inspired by the above methods, the deterministic learning theory and SVM method have been used to detect rotor unbalance faults. First, the dynamical trajectory of rotor systems with different unbalance faults are identified by deterministic learning, while the SE, FE, and PE are used to extract the dynamic features based on the obtained dynamical trajectory. Second, the corresponding dynamic features are input into the SVM with a Gaussian kernel (Gaussian-SVM) to train the classification model. Finally, the unbalance faults are detected and classified based on the training SVM model. The results of the rotor unbalance fault test rig demonstrate the advantages of the proposed method. The main contribution of this study is the improved sensitivity diagnosis based on the deterministic learning theory and Gaussian-SVM method.
The remainder of this paper is organized as follows. Section 2 presents the problem statement. Section 3 describes the experiments and methods employed in this study. The data analysis and diagnosis results are provided in Section 4. Section 5 presents some discussions. Section 6 presents the conclusions and directions for future study.
Problem formulation
A schematic diagram of the rotor unbalance is shown in Figure 1. The black shaft and rotor disk in the figure represent the normal state of the rotor system (the centroid is
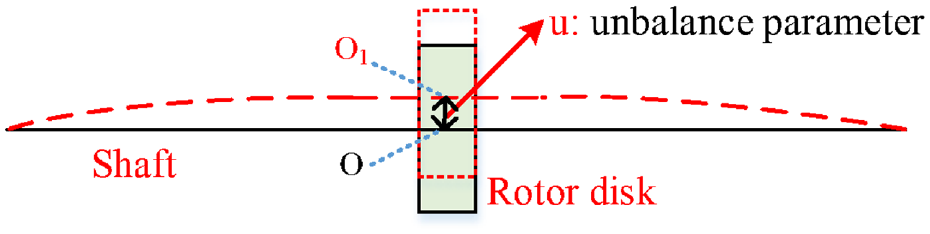
The schematic diagram of the rotor unbalance.
The mathematical model of the rotor has been investigated in numerous studies, which can be described in the following form.7,24

where
The unbalance parameter
Materials and methods
Rotor unbalance experiments
The rotor unbalance test rig is shown in Figure 2. The rotor unbalance device consists of a disk and counterweights. The vibrations of the test rig in the
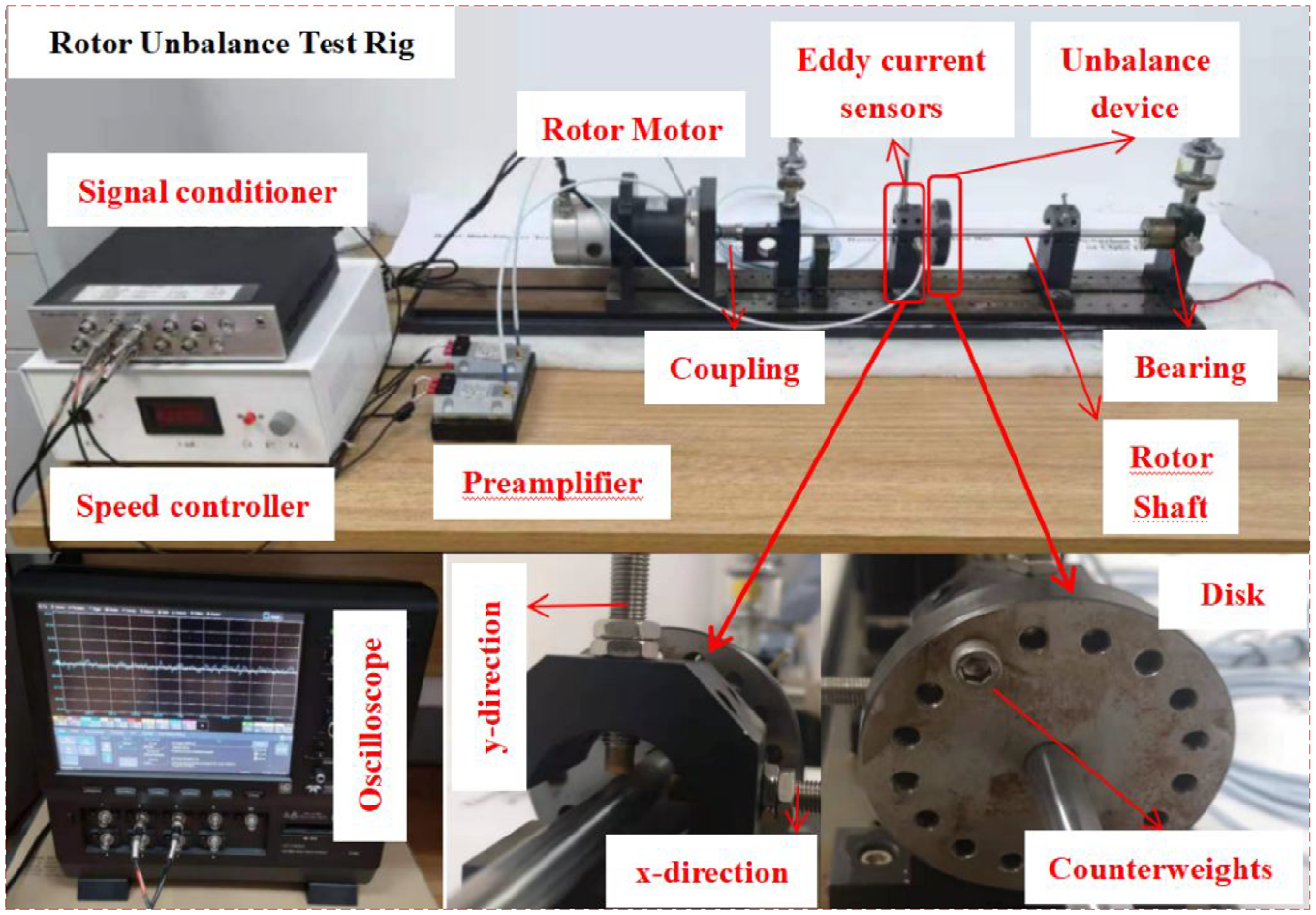
Rotor unbalance test rig.
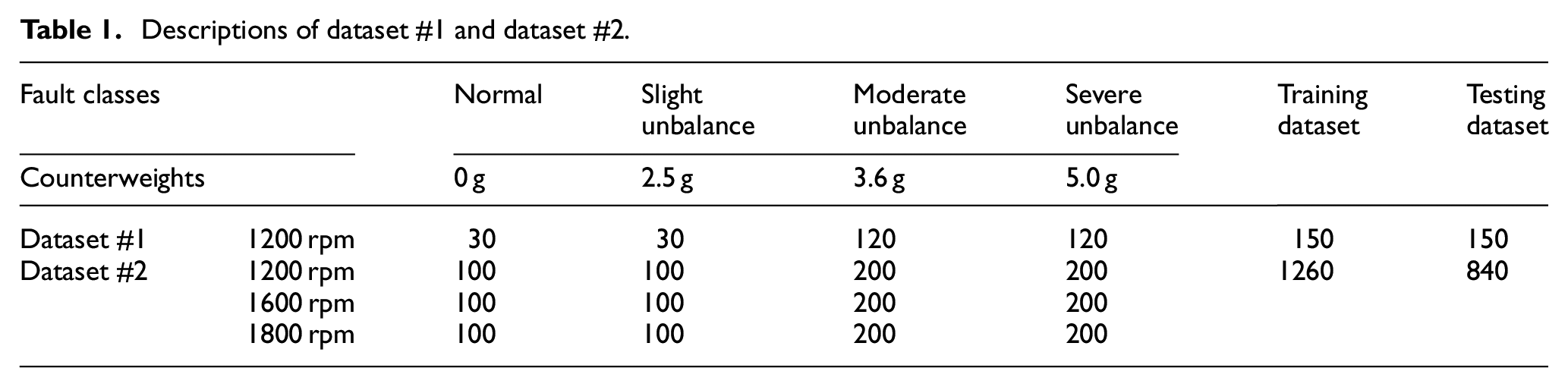
Based on the selected counterweights, the corresponding data samples were divided into four classes of unbalance faults: normal class (0 g counterweight), slight unbalance fault class (2.5 g counterweight), moderate unbalance fault class (3.6 g counterweight), and severe unbalance fault class (5.0 g counterweight). The sample frequency was set as 5.12 kHz, and the sampling time was 2 s. In this study, two unbalance fault datasets (a small dataset #1 and big dataset #2) were constructed as follows. For dataset #1, the sampling speed was set as 1200 rpm. The normal class includes 30 sample data obtained with the benchmark test rig. The slight unbalance fault class also includes 30 sample data associated with the 2.5 g counterweight. The other two classes have 240 sample data (each class contained 120 data associated with the 3.6 and 5.0 g counterweights).
For dataset #2, the unbalance data was collected under three different rotor speeds: 1200, 1600, and 1800 rpm. The total number of data samples is 2100. Detailed descriptions of dataset #1 and dataset #2 are provided in Table 1. To evaluate the proposed method, the training and testing datasets were randomly divided 1:1 for dataset #1 and 6:4 for dataset #2.
Descriptions of dataset #1 and dataset #2.
Deterministic learning
To diagnose the unbalance faults, the nonlinear dynamical ordinary differential equation (1) was first considered to identify the dynamical trajectory. Under various conditions, the system uncertainties and unknown dynamics could not be clearly decoupled; therefore, these two factors were considered as a whole term to be identified. 21 The following RBF neural network was constructed to estimate the system dynamics.

where

where

where

where
Dynamics features
Based on the obtained dynamical trajectory data
Support vector machine
The SVM has been widely used in the field of diagnosis owing to its good optimization and generalization ability, and short training time.15–17 The basic idea of the SVM is to construct a hyperplane for the optimal separation of different classes of input data. It is suitable for nonlinear and high-dimensional conditions.
11
Based on the contents of the SVM, the hyperplane can be described as
For the obtained rotor fault dynamics feature training dataset

where

The Gaussian kernel function was input into the SVM (Gaussian-SVM) for the diagnosis of rotor unbalance faults. Based on the Gaussian function, the selection of parameters is highly dependent on the accuracy of classification because the kernel function is directly related to the optimal hyperplane. In this study, the determination of the upper parameter of the Gaussian kernel function is utilized based on the rid-quadtree model selection method, which was proposed by Beltrami and da Silva. 17
To address the multiclass classification problem, the one-against-all (OAA) method was applied to deal with the diagnosis of the four classes of unbalance faults. The reason is because the OAA-SVM is the least time-consuming among the multiclass classification methods (e.g. one-against-one SVM). 15 The detailed OAA-SVM process is as follows.
• For the four classes of rotor unbalance faults, the decision function of the optimal hyperplane is set as follows.

where
• The input fault data
Based on the selected kernel function (Gaussian-SVM) and the multiclass classifier (OAA-SVM), the accurate diagnosis of the rotor system with four classes unbalance faults was obtained in the following experimental section.
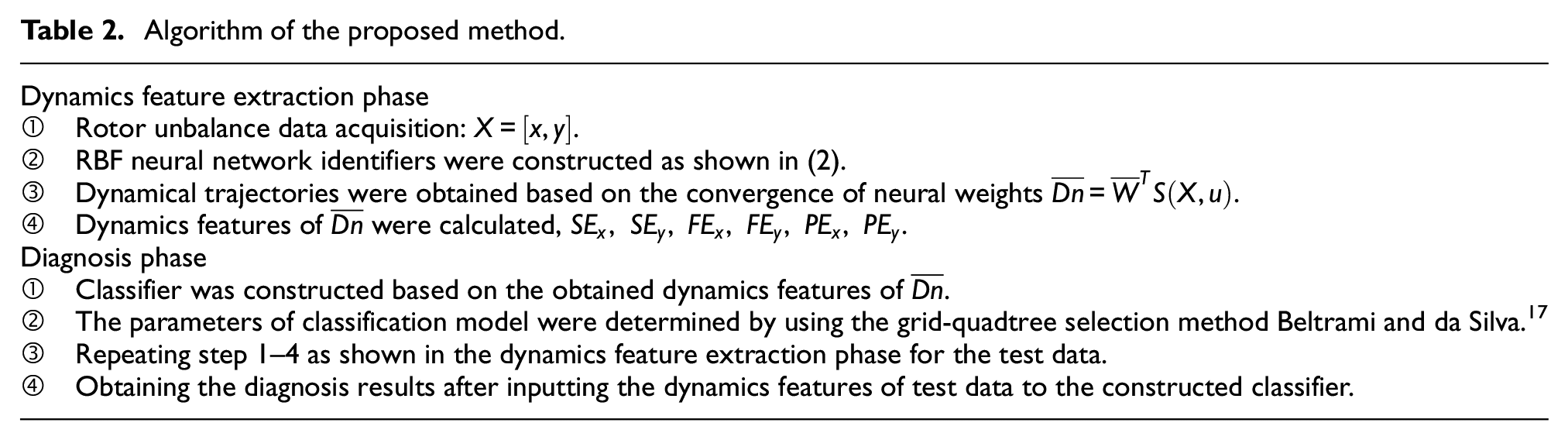
In this study, the deterministic learning and the Gaussian-SVM were combined to detection the rotor unbalance faults more accurately. The proposed method included two phases, which are the dynamics feature extraction phase and the diagnosis phase. The following Figure 3 presents a flowchart of the proposed method, and the algorithm of the proposed method is shown in Table 2. The obtained experimental unbalance data were input into the dynamical RBF neural networks, and the dynamical trajectories of different unbalance fault classes were stored. The nonlinear features (SE, FE, and PE) were extracted based on the dynamical trajectory. Finally, the dynamics features were used to train the classification model based on the Gaussian-SVM.
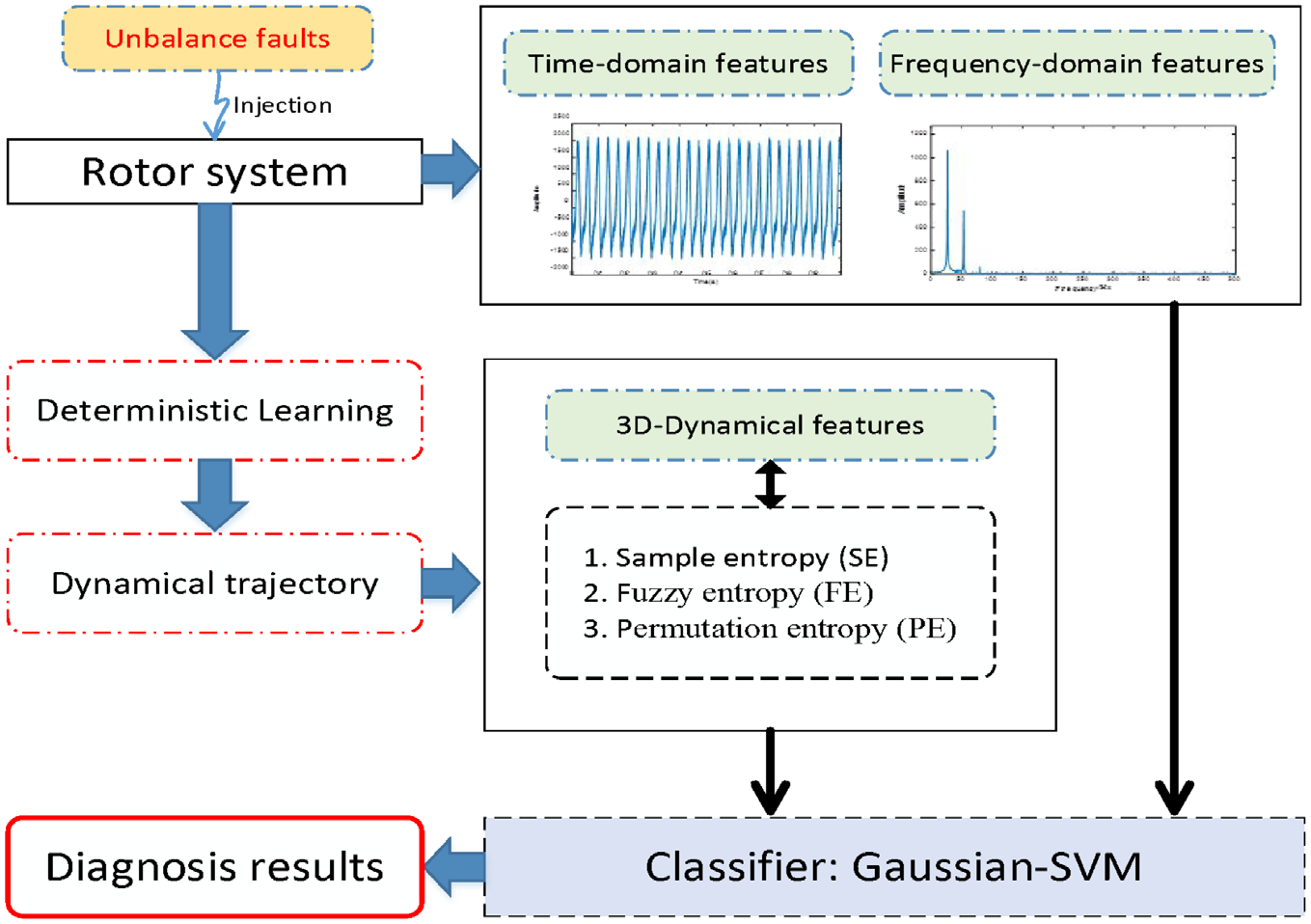
Flowchart of the proposed method.
Algorithm of the proposed method.
Diagnosis results
Firstly, dataset #1 was selected to represent the detailed diagnosis process. The time-domain waveforms of the four classes of unbalance faults are shown in Figure 4. Figure 4(a) to (d) were related to the normal class, the slight unbalance class, the moderate unbalance class and the severe unbalance class.
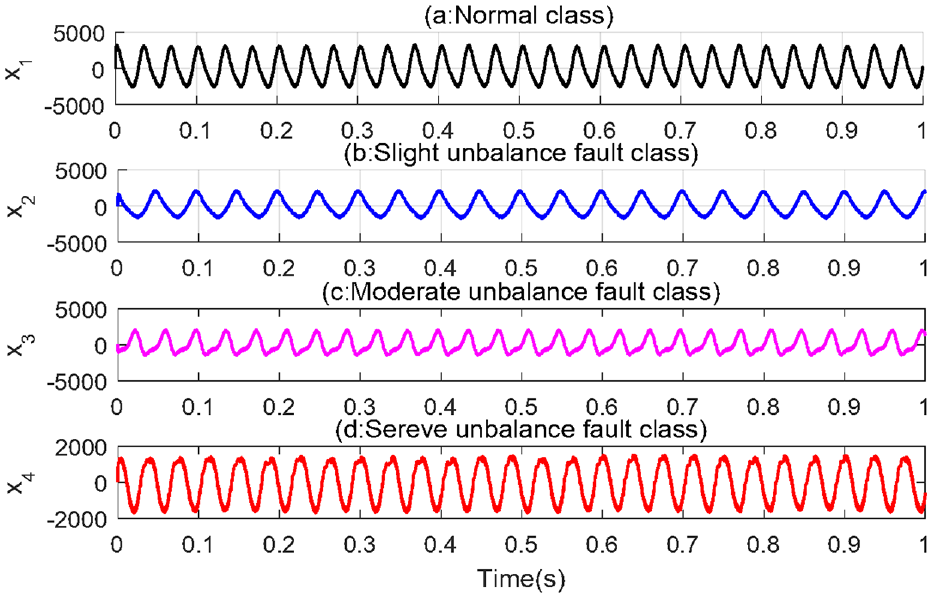
Time-domain wave forms of four classes of unbalance faults: (a) normal, (b) slight unbalance fault, (c) moderate unbalance fault, and (d) severe unbalance fault.
The corresponding frequency and marginal spectrum are shown in Figures 5 and 6, respectively. The time-domain features (e.g. extremum, mean value, variance, and kurtosis) and frequency features (e.g. amplitude-frequency, phase-frequency, and peak difference) which were extracted from the rotor system state are noted as the static features for the further classification comparison. As seen in Figures 5 and 6, the main frequency components of the normal class are concentrated on the fundamental frequency (1X) and second harmonic frequency (2X). The third harmonic frequency (3X) is included in the main frequency components of the slight unbalance class. The third harmonic frequency (3X) and second frequency (2X) are separated more clearly in the moderate unbalance class. The severe unbalance class had a weak quadruple frequency.
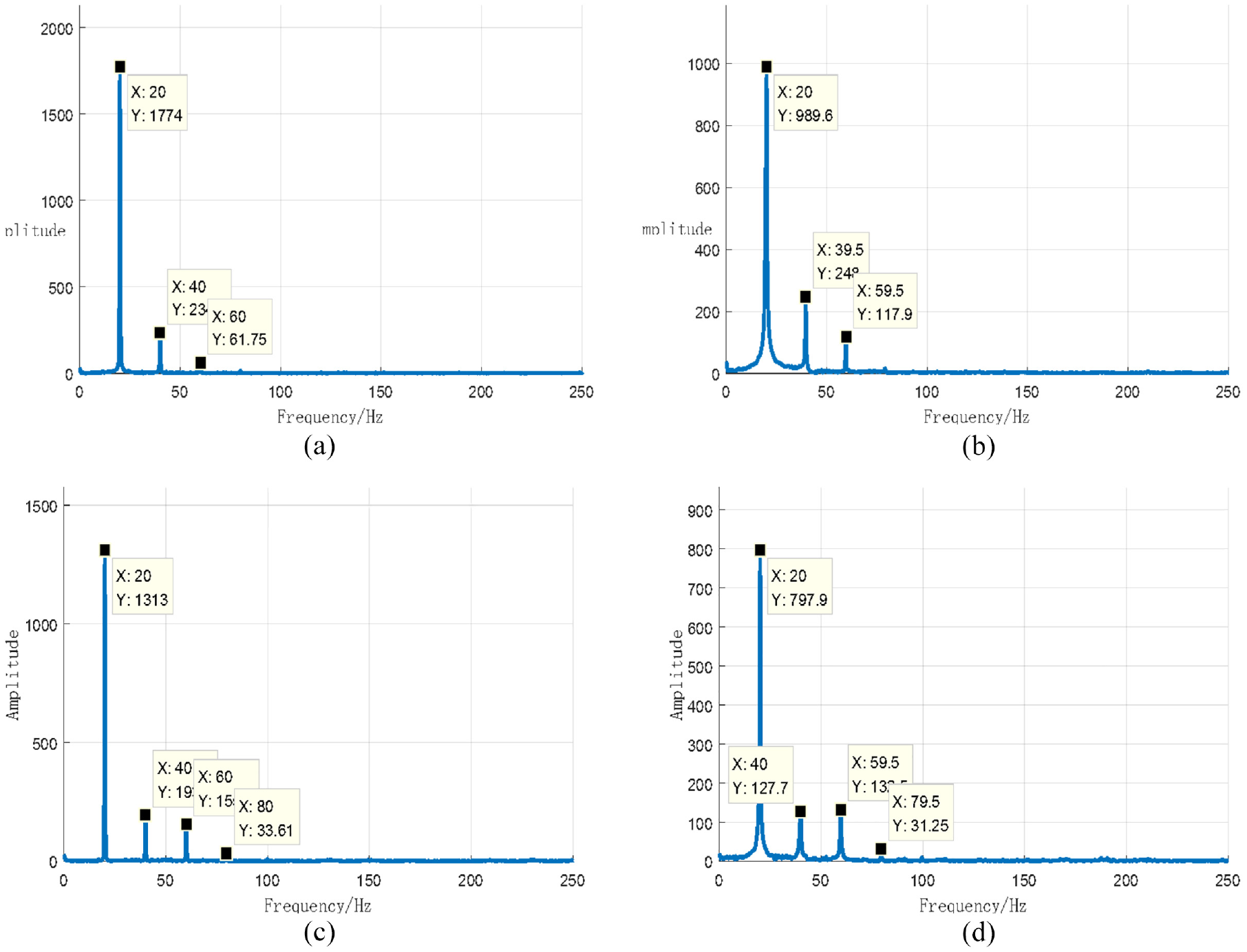
Frequency spectrum of four classes of unbalance faults: (a) normal, (b) slight unbalance fault, (c) moderate unbalance fault, and (d) severe unbalance fault.
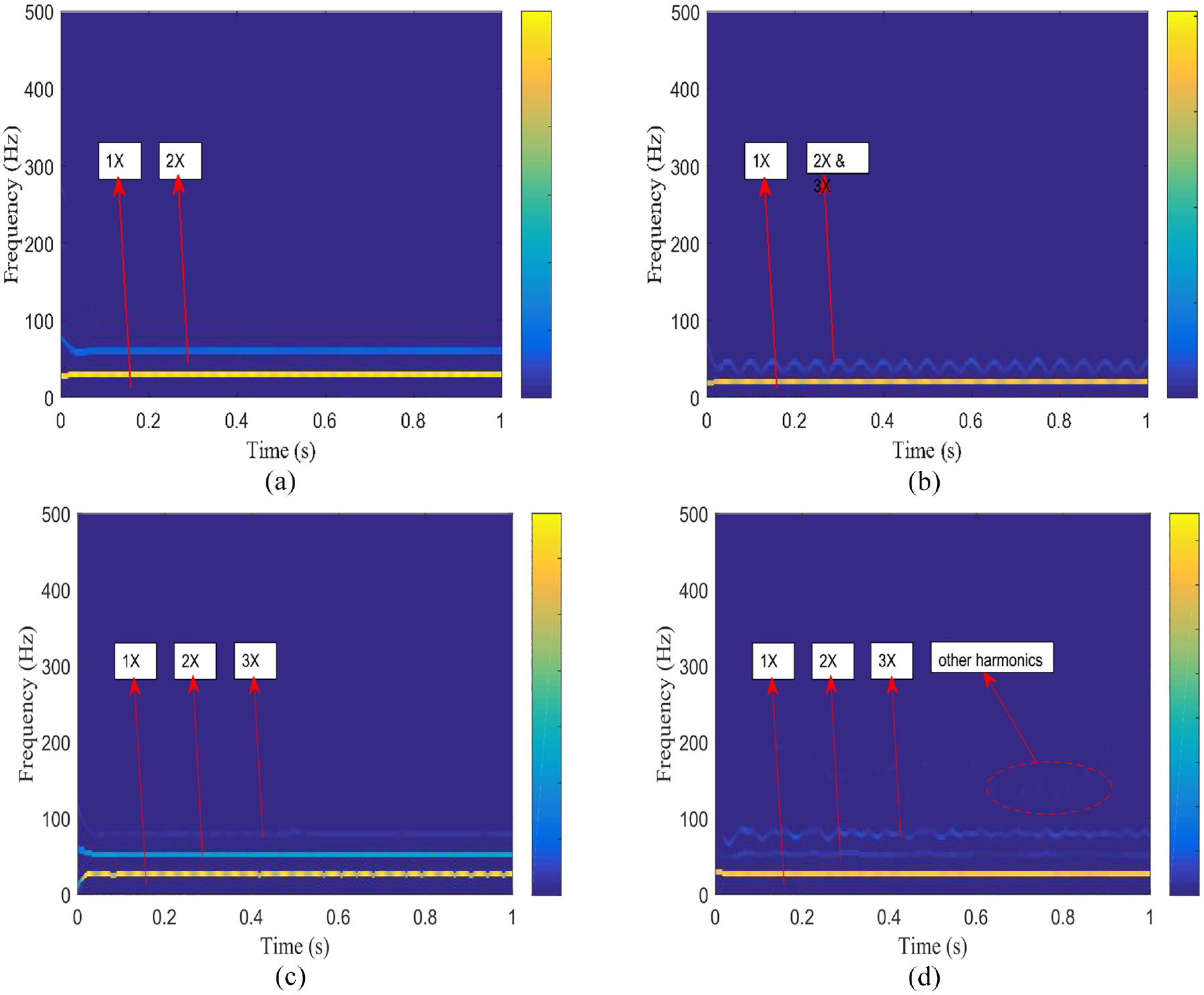
Marginal spectrum of the four classes of unbalance faults: (a) normal, (b) slight unbalance fault, (c) moderate unbalance fault, and (d) severe unbalance fault.
Secondly, the deterministic learning theory was used to identify the rotor system dynamics. The dynamical trajectory was obtained from equation (5). The parameters of RBF neural networks, which are used for deterministic learning, were set as:
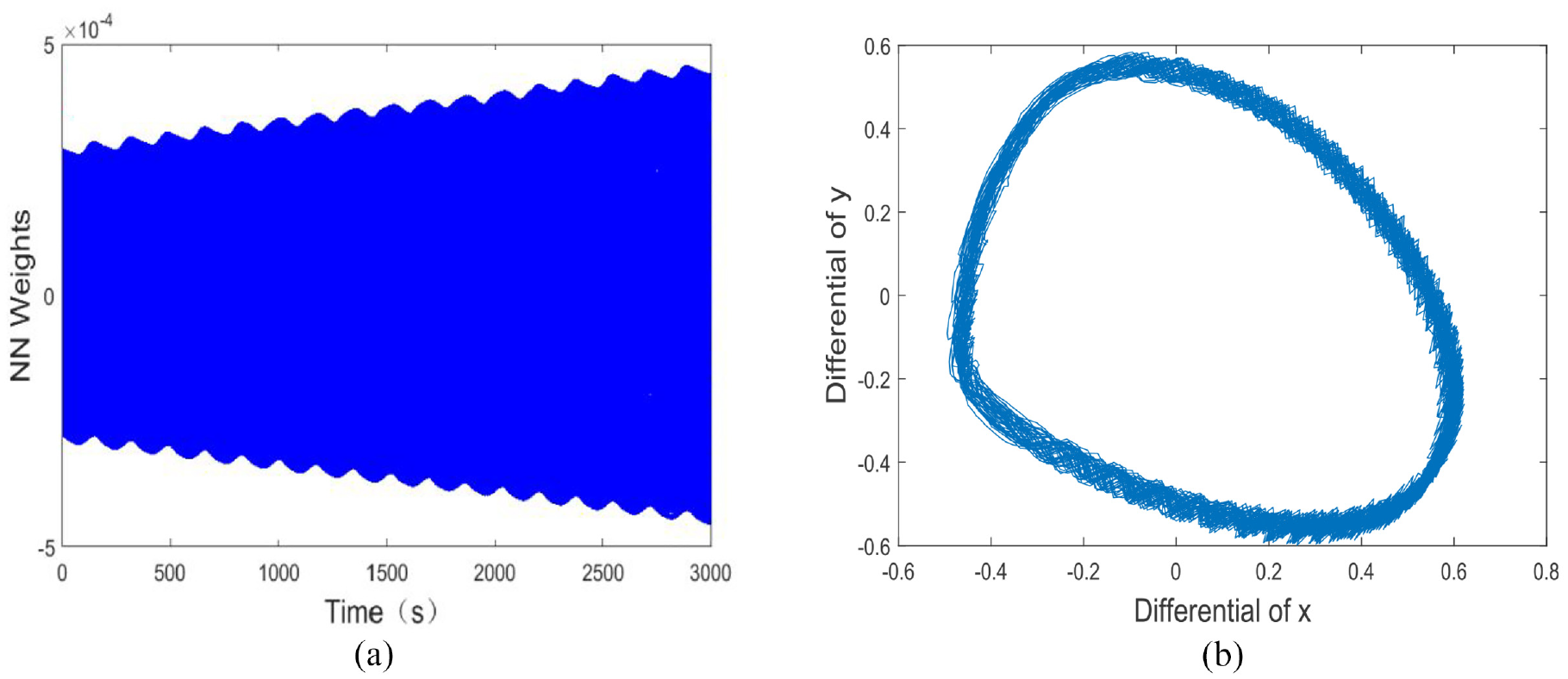
Dynamical trajectory identification of normal condition. (a) convergence of NN weights and (b) dynamics trajectory.
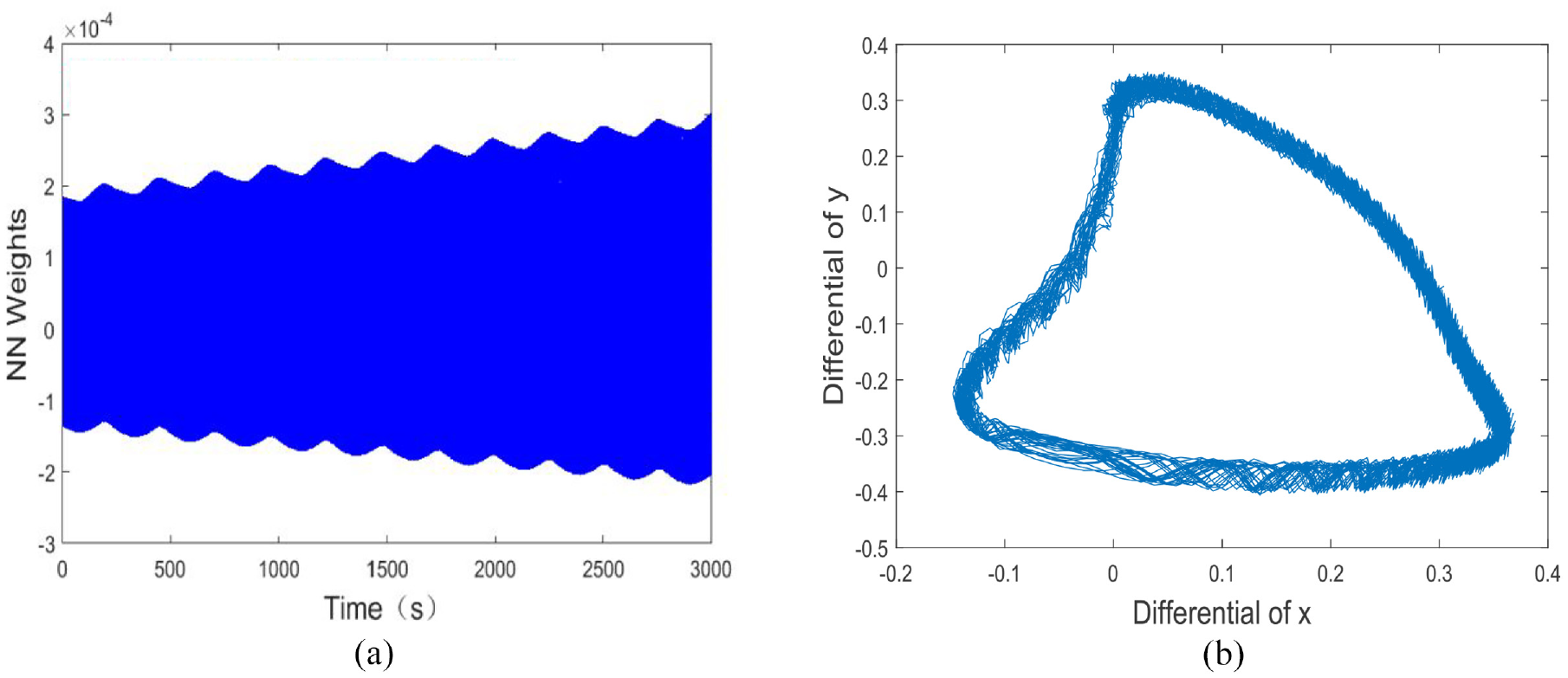
Dynamical trajectory identification of slight unbalance fault. (a) convergence of NN weights and (b) dynamics trajectory.
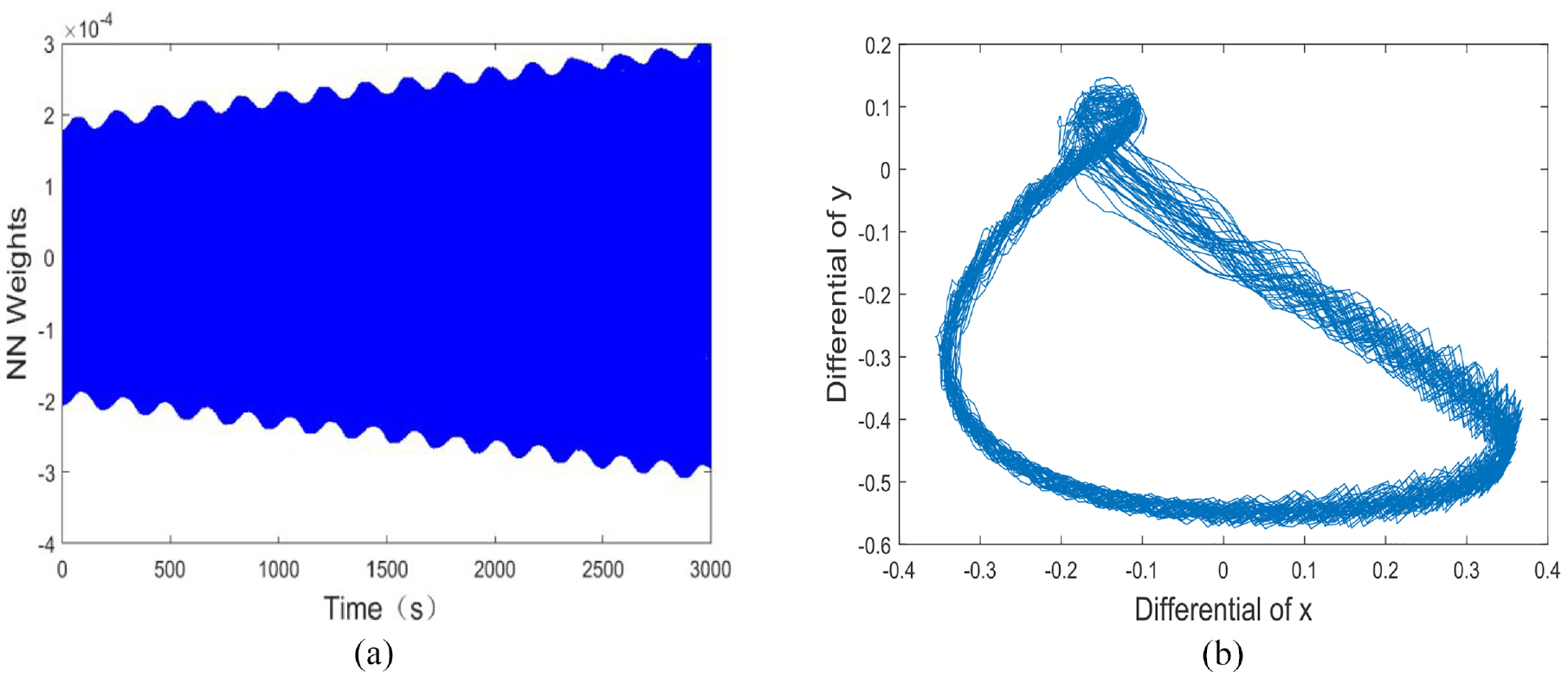
Dynamical trajectory identification of moderate unbalance fault. (a) convergence of NN weights and (b) dynamics trajectory.
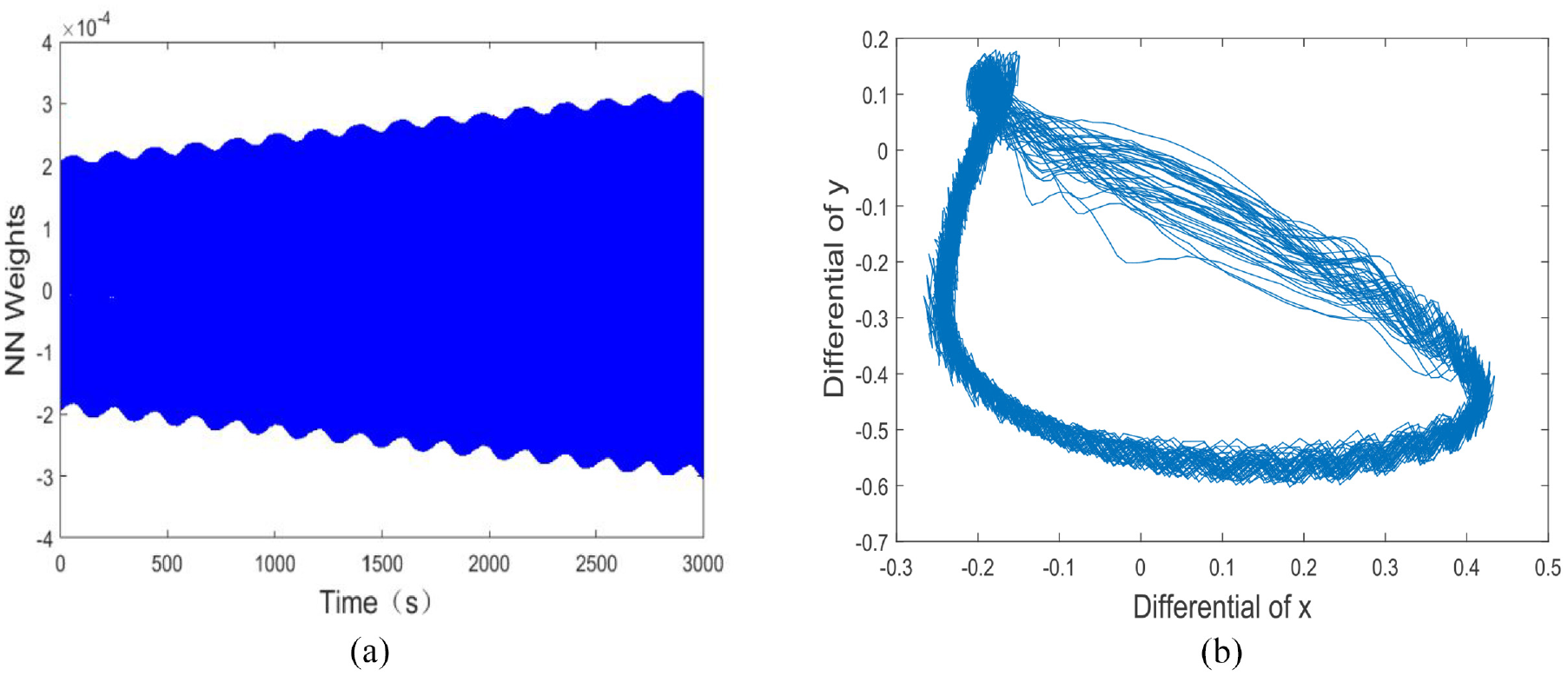
Dynamical trajectory identification of severe unbalance fault. (a) convergence of NN weights and (b) dynamics trajectory.
Compared with the time-frequency features in Figures 4 to 6, it shows that the dynamical trajectory shapes of the different classes of unbalance faults were clearly distinguished from the identification results. Based on the Figures 7(b) and 10(b), the identified dynamical trajectories can be stored as the constant data owing to the convergence of the neural weights (Figures 7(a) and 10(a)). Finally, based on the obtained dynamical trajectory data, the dynamics features, including
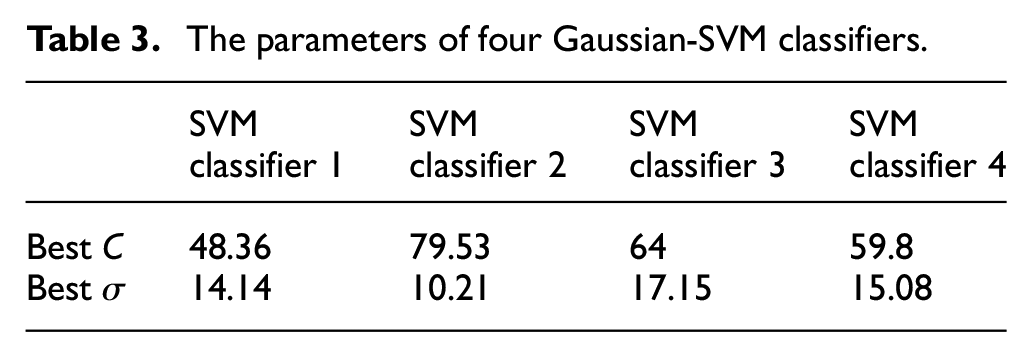
The parameters of four Gaussian-SVM classifiers.
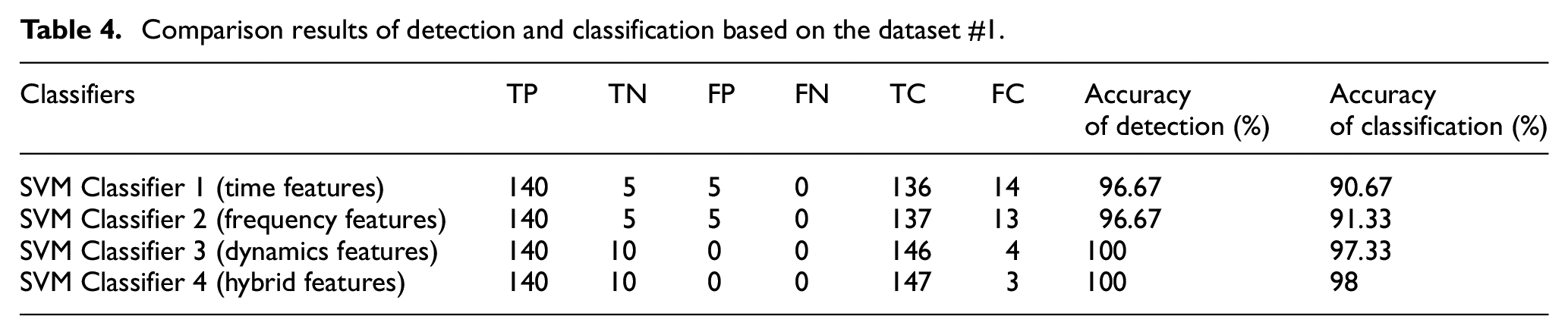
For test dataset #1, based on the four training classifiers, the detailed classification results and their corresponding confusion matrices are shown in Figures 11 and 12. The figures show that the normal class, slight unbalance fault class, moderate unbalance fault class, and severe class can be accurately classified using the proposed method. It is also shown that the SVM with dynamics features has a higher classification rate (Acc = 97.33%) than the SVM with time-domain features (Acc = 90.67%) or frequency features (Acc = 91.33%). In particular, the detection of rotor unbalance faults reached 100% using SVM classifier 3, with a false alarm rate (FAR) of zero. The detailed comparison of the detection and classification results is shown in Table 4. The static and dynamics features were combined for training SVM classifier 4. The fault detection accuracy was also 100%, while the classification results reached 98%. The similar diagnosis results of SVM classifiers 3 and 4 indicate that the dynamics features have the greatest impact on the classification results and are more sensitive to abnormal unbalance changes in the rotor system.
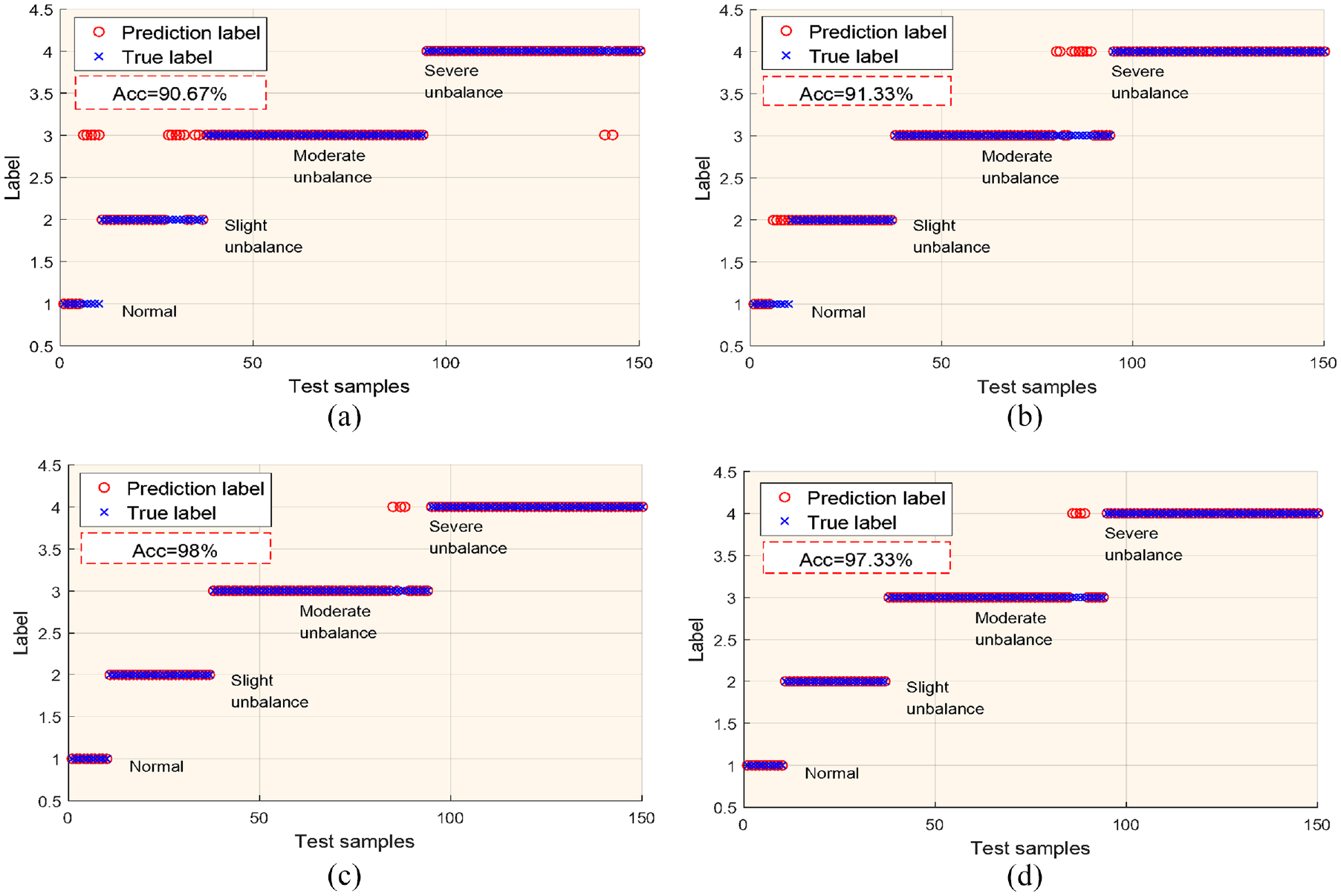
The diagnosis results of rotor unbalance faults based on dataset #1. (a) based on the SVM classifier 1, (b) based on the SVM classifier 2, (c) based on the SVM classifier 3, and (d) based on the SVM classifier 4.
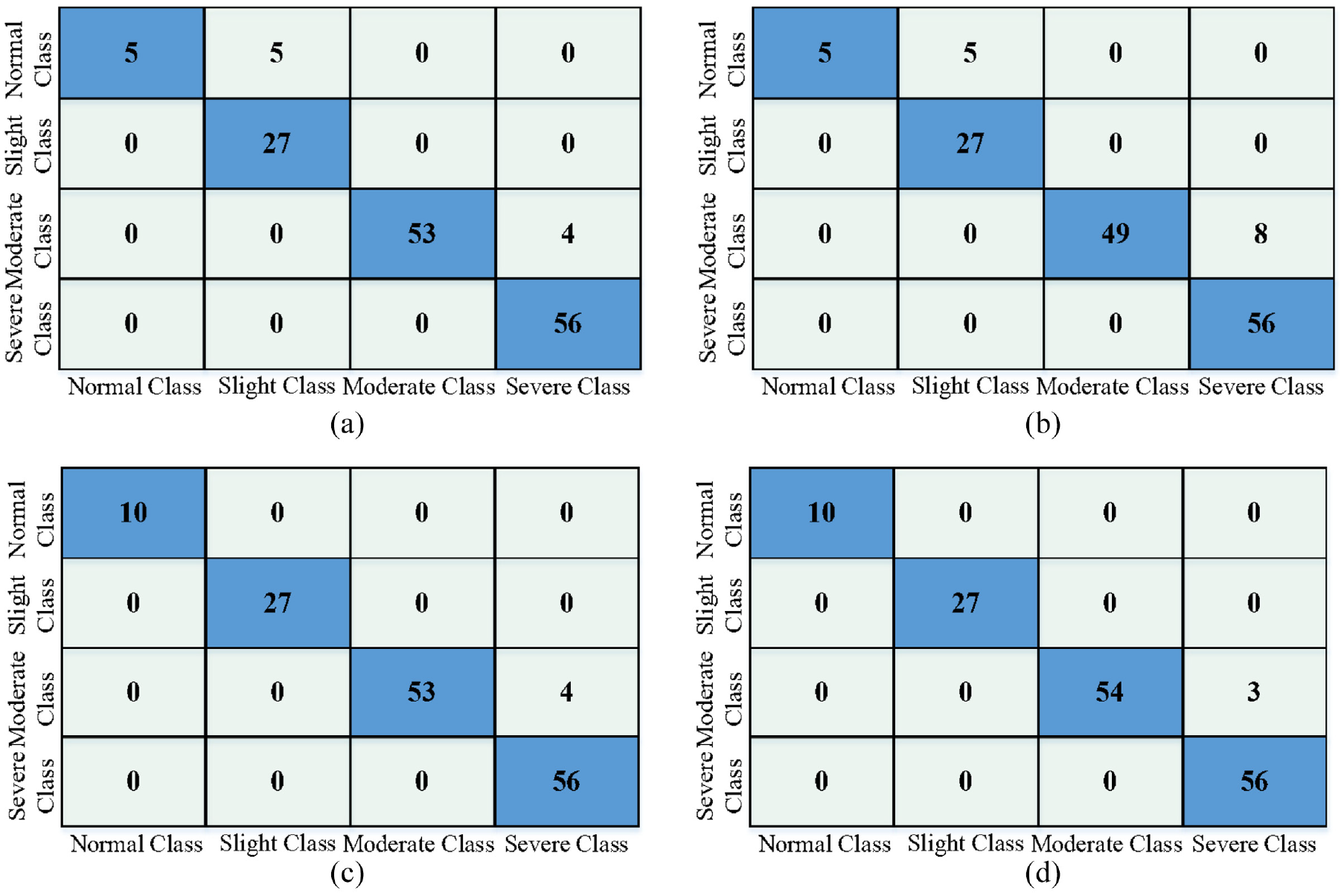
The confusion matrices for the four classifiers based on dataset #1. (a) based on the SVM classifier, (b) based on the SVM classifier 2, (c) based on the SVM classifier 3, and (d) based on the SVM classifier 4.
Comparison results of detection and classification based on the dataset #1.
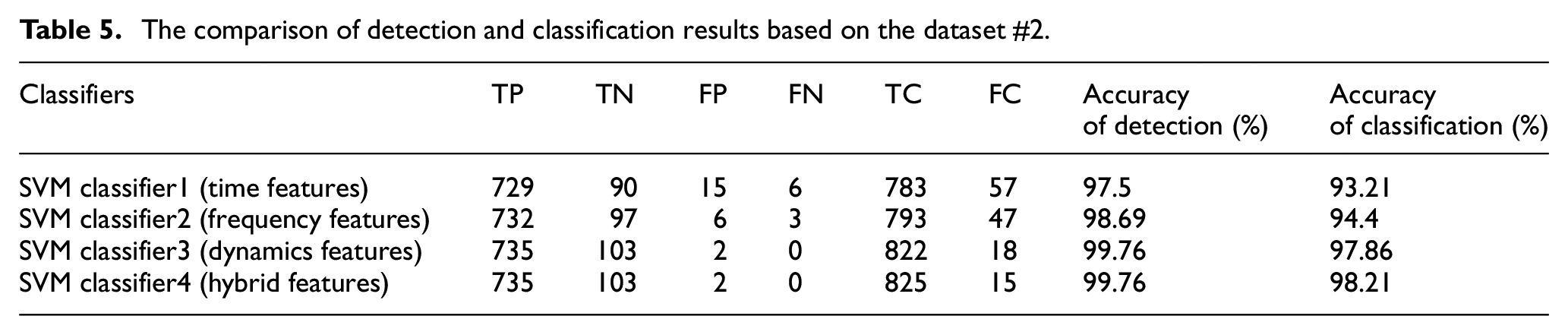
Dataset #2 was also used to verify the effectiveness of the proposed method. The diagnosis confusion matrices are shown in Figure 13. The detailed comparison of the detection and classification results is presented in Table 5. It can be seen that the classification results of dataset #2 are consistent with the results of dataset #1. Most importantly, based on the dynamics or hybrid features, the FAR valued (FAR = 2/105 = 1.9%) are still much lower than the FAR of SVM classifier 1 (FAR = 15/105 = 14.29%) and classifier 2 (FAR = 8/105 = 7.62%). The results of datasets #1 and #2 show that the diagnostic performance of the proposed method has advantages in the case of small samples, which are more suitable for practical applications.
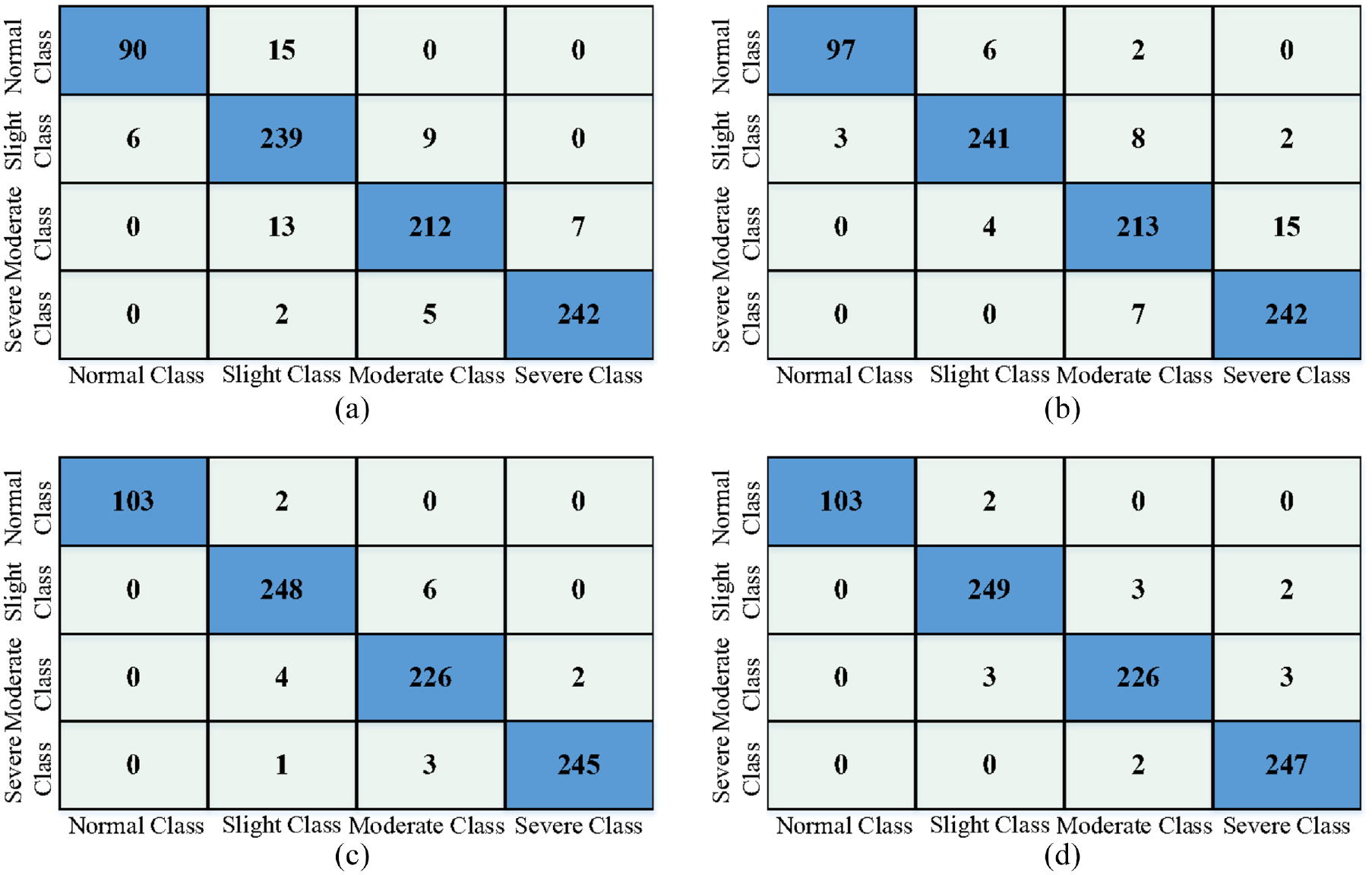
The confusion matrices for the four classifiers based on dataset #2. (a) based on the SVM classifier, (b) based on the SVM classifier 2, (c) based on the SVM classifier 3, and (d) based on the SVM classifier 4.
The comparison of detection and classification results based on the dataset #2.
Discussion
Conclusion
In this study, dynamics features including SE, FE, and PE of rotor unbalance faults were firstly extracted based on the dynamical trajectory (in which was obtained by using the deterministic learning theory), and the diagnosis results based on the dynamics features and Gaussian-SVM achieved more accurate classification of different degrees of rotor unbalance faults. Based on the experiment results, it is indicated that the extracted rotor dynamics features were more sensitivity to the changes of rotor unbalance faults. For the further investigation, the prognosis of rotor unbalance faults and the diagnosis of other rotor faults (e.g. rub-impact faults) based on the dynamics features can be considered.
Research Data
sj-rar-1-mac-10.1177_00202940221135917 – Supplemental material for Fault detection and classification of the rotor unbalance based on dynamics features and support vector machine
Supplemental material, sj-rar-1-mac-10.1177_00202940221135917 for Fault detection and classification of the rotor unbalance based on dynamics features and support vector machine by Lan Lan, Xiao Liu and Qian Wang in Measurement and Control
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the Henan Province Foundation for University Key Teacher [grant numbers 2018GGHS243], partly supported by the Doctoral Research Project of Zhengzhou University of Light Industry [grant number 2020BSJJ078], and partly supported by the Science and Technology Research Project of Henan Province [grant numbers 222102220007].
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.