
Abstract
To improve the accuracy of the sensorless control system for permanent magnet synchronous motors, this paper proposes the based on fractional order integral sliding mode theory in the model reference adaptive system observer. The purpose of this approach is to enhance the robustness of the system. Furthermore, this paper introduces the second-order sliding mode reaching law to suppress chattering phenomena and improve the control accuracy of the observer. Simulation results show that this strategy achieves excellent dynamic and static performance.
Introduction
In contemporary AC speed control systems, the three-phase Permanent Magnet Synchronous Motors (PMSMs) have emerged as the preferred choice across a spectrum of industries, manufacturing processes, and the domain of new energy vehicles. In comparison to asynchronous induction motors, PMSMs offer an array of advantages, including a compact physical footprint, simplified structural configurations, and substantial gains in energy efficiency. Moreover, PMSMs manifest notably superior attributes in terms of motor efficiency and power factor. Consequently, they are progressively supplanting asynchronous induction motors and garnering substantial recognition within the industrial landscape.1–3
In the control of Permanent Magnet Synchronous Motor (PMSM) drive systems, the precise acquisition of motor speed and position signals holds paramount importance. Currently, the prevalent approach entails the integration of high-precision speed sensors to fulfill this requirement. However, the adoption of such high-precision speed sensors not only escalates the overall cost of the drive system but also amplifies the susceptibility to system failures.4,5 Consequently, the development of sensorless control strategies for PMSMs emerges as a pivotal endeavor, driven by the objectives of bolstering system reliability and curtailing expenditure. Principal methodologies in this endeavor encompass the sliding mode observer method,1,6,7 the high-frequency signal injection method,8,9 and the model reference adaptive method.10–12 A distinct approach, as articulated in literature Yongpeng et al., 13 opts for the sliding mode observer without the need for speed sensing. While this method accurately estimates motor speed and position, it does not significantly mitigate the issue of system chattering. In contrast, literature Shuang et al. 14 introduces a technique involving the superimposition of DC bias on high-frequency injected signals to estimate speed. This approach garners advantages in terms of a broad speed range and high estimation precision. Nonetheless, the introduction of DC bias signals adds complexity to the system’s control architecture. Literature Kang et al. 15 employs the model reference adaptive system observer (MRASO), albeit with a caveat – its accuracy is contingent upon the precision of known motor parameters. In an effort to circumvent this limitation, literature Comanescu and Xu 16 incorporates sliding mode control into MRASO, thereby augmenting system robustness and reducing reliance on motor parameters. Regrettably, the emergence of sliding mode chattering within this amalgamated approach impairs estimation accuracy. The work documented in literature Qingfang et al. 17 endeavors to establish an integral sliding mode surface that employs stator current error to mitigate the sliding mode chattering phenomenon and enhance system control accuracy. Nevertheless, this strategy encounters challenges. Specifically, when the initial error is of significant magnitude or the reference signal undergoes abrupt changes, an integral saturation effect ensues, resulting in a reduction in the system’s transient performance and, in severe cases, instability. Given these aforementioned challenges, this paper introduces a fractional-order integral second-order sliding mode model reference adaptive system observer (FOSOSM-MRASO). The core contributions of this research endeavor are succinctly summarized as follows:
Integrating fractional-order integral sliding mode theory with a model reference system observer to enhance system robustness while ensuring finite-time convergence;
Introducing a second-order sliding mode reaching law to further mitigate sliding mode chattering and enhance system control accuracy.
SPMSM mathematical model
The mathematical model of the Surface-mounted Permanent Magnet Synchronous Motor (SPMSM) in the d–q rotated coordinate system is as follows:
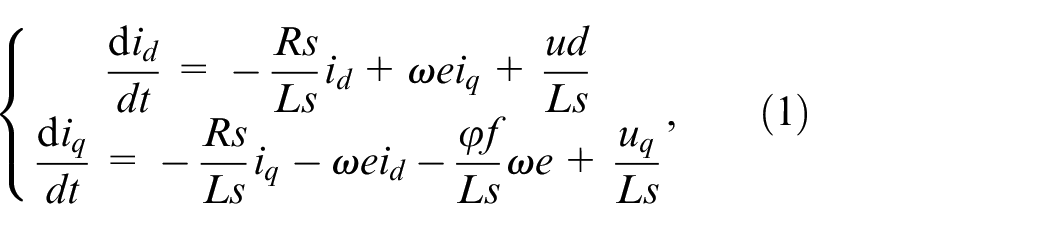
where
Design of FOGSOSM-MRASO
Conventional MRASO
The Model Reference Adaptive System Observer (MRASO) comprises two models: a reference model and an adjustable model. The estimation of speed is achieved by comparing the outputs of these two models and using the resulting difference as feedback to the adaptive mechanism.
The reference model can be derived from equation (1) as follows:
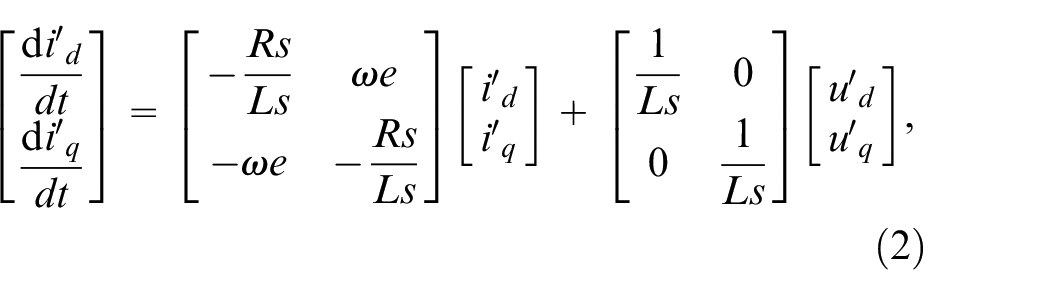
where
Given the unknown motor speed, the adjustable model can be formulated as follows:
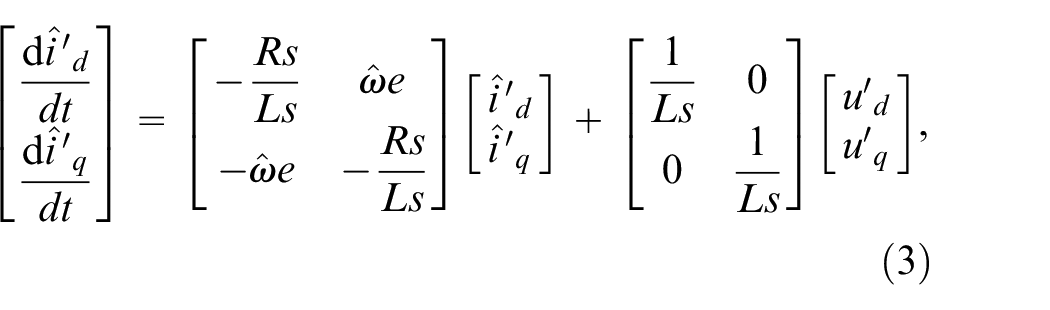
where
The disparity between the outputs of the two models is defined as:

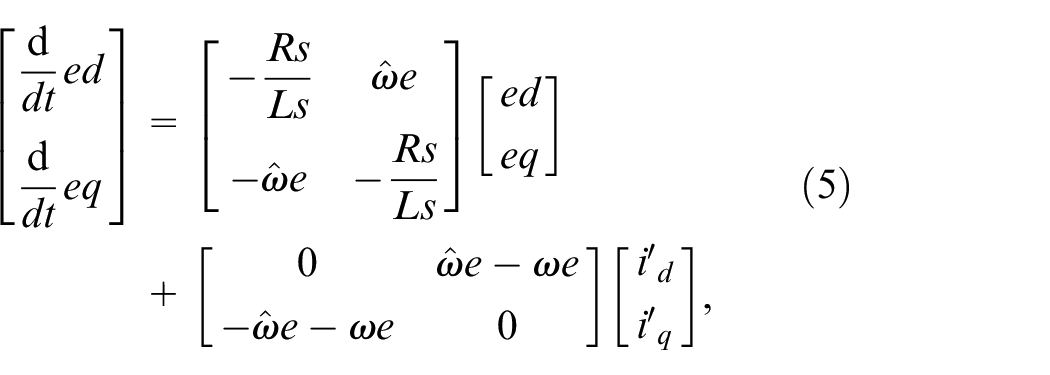
The dynamic error equation derived from equation (5) is as follows:
The estimated speed can be determined using Popov’s theory of hyper-stability, as follows:

where

The conventional MRASO structure is depicted in Figure 1.
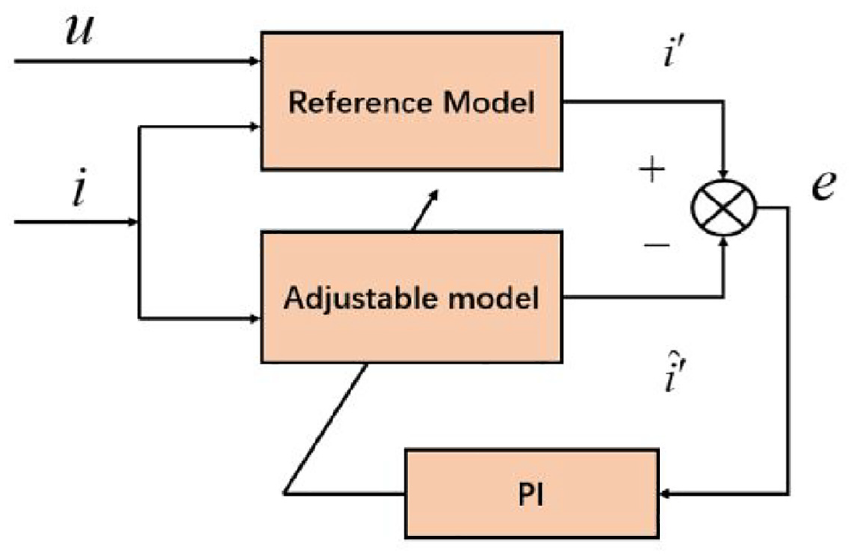
The Block diagram of the MRASO structure.
Fractional order calculus theory
Fractional-order calculus is, in essence, a branch of mathematics that deals with differentiation and integration of arbitrary orders, allowing for real or even complex values as orders. It represents a generalization of the traditional integer-order differentiation and integration to accommodate a broader range of orders. When applying fractional order calculus, it is common to use
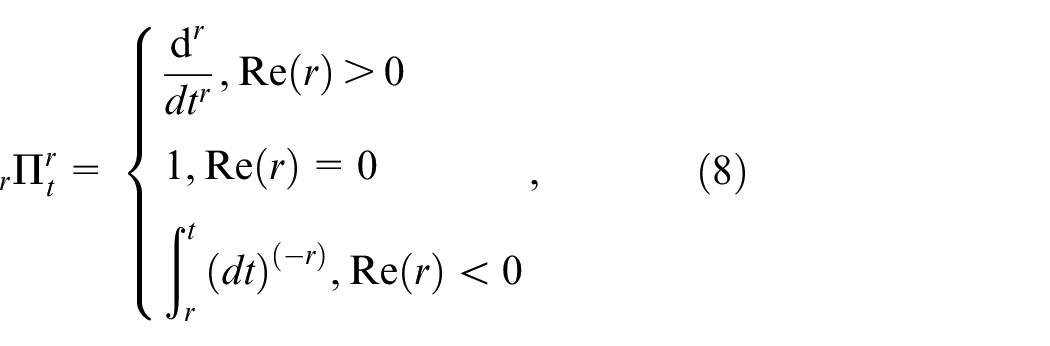
where
Fractional-order calculus possesses the following properties 18 :
Property 1:

Property 2:
The law of exchange is applicable in the context of fractional-order calculus with superposition.

In this paper, a modified Oustaloup filter algorithm is employed to implement the fractional-order calculus operator. For ease of representation, this paper uses
Design of fractional order second-order sliding mode control
The conventional PI controller often fails to deliver satisfactory performance when the system experiences disturbances caused by fixed parameters. In response to this limitation, sliding mode variable structure control is introduced as a replacement for the PI controller, aiming to enhance the system’s robustness. The integral sliding mode surface is meticulously designed to achieve this objective 19 :

where

where

where
To address the aforementioned issue, the second-order sliding mode reaching law is employed to mitigate chattering. It takes on the general form 20 :

where

Stability analyses
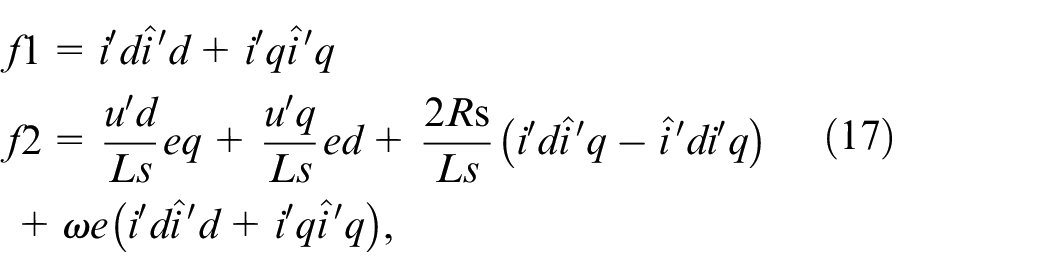
Derived for the stator current error:

where:
To establish the system’s stability, define the Lyapunov function as:

The derivation of equation (18) is as follows:
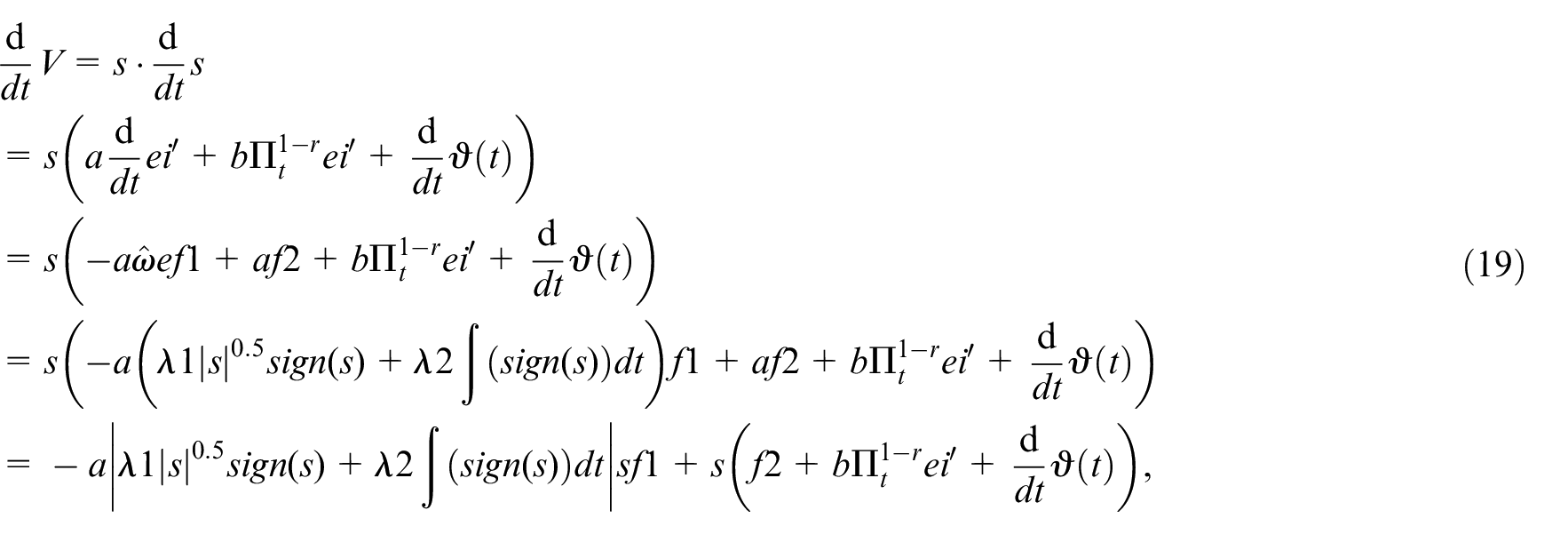
To ensure that the system is stable,
From equation (20), it can be seen that the selected values of
Theorem 1: For equation (14), if

Then the system is able to converge to the origin in finite time.
Theorem 2: When
To prove that equation (21) satisfies the finite time convergence of equation (14), the quadratic-like Lyapunov function is designed as 21 :

where
where
Let be

where

Simulations
In this paper, the structural block diagram of the SPMSM sensorless control strategy based on a FOSOSM-MRASO is shown in Figure. 2, with the following SPMSM parameters: stator resistance
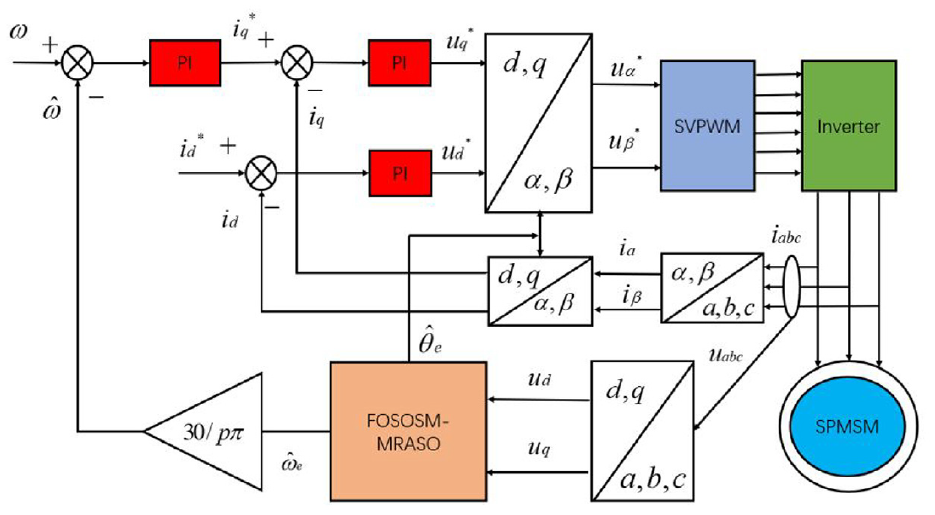
The SPMSM sensorless control strategy based on a FOSOSM-MRASO.
The system starts without any load, and the specified speed is set at 1000 RPM. At 0.2 s, a load of 5 N·m is suddenly applied to the system. Then, at 0.4 s, the load is reduced by an additional 5 N·m.
Figure 2 illustrates the estimated speed and estimated position responses for the system waveforms. It’s evident from Figure 2 that the estimated speed generated by the PI-MRASO struggles to effectively track the actual speed of the system during the initial start-up phase. Nevertheless, during the steady-state phase, the estimated speed closely aligns with the actual speed. When the system encounters load disturbances, as depicted in Figures 2 and 3, the PI-MRASO exhibits increased errors in both speed and position. These heightened errors indicate a lack of robustness against disturbances.
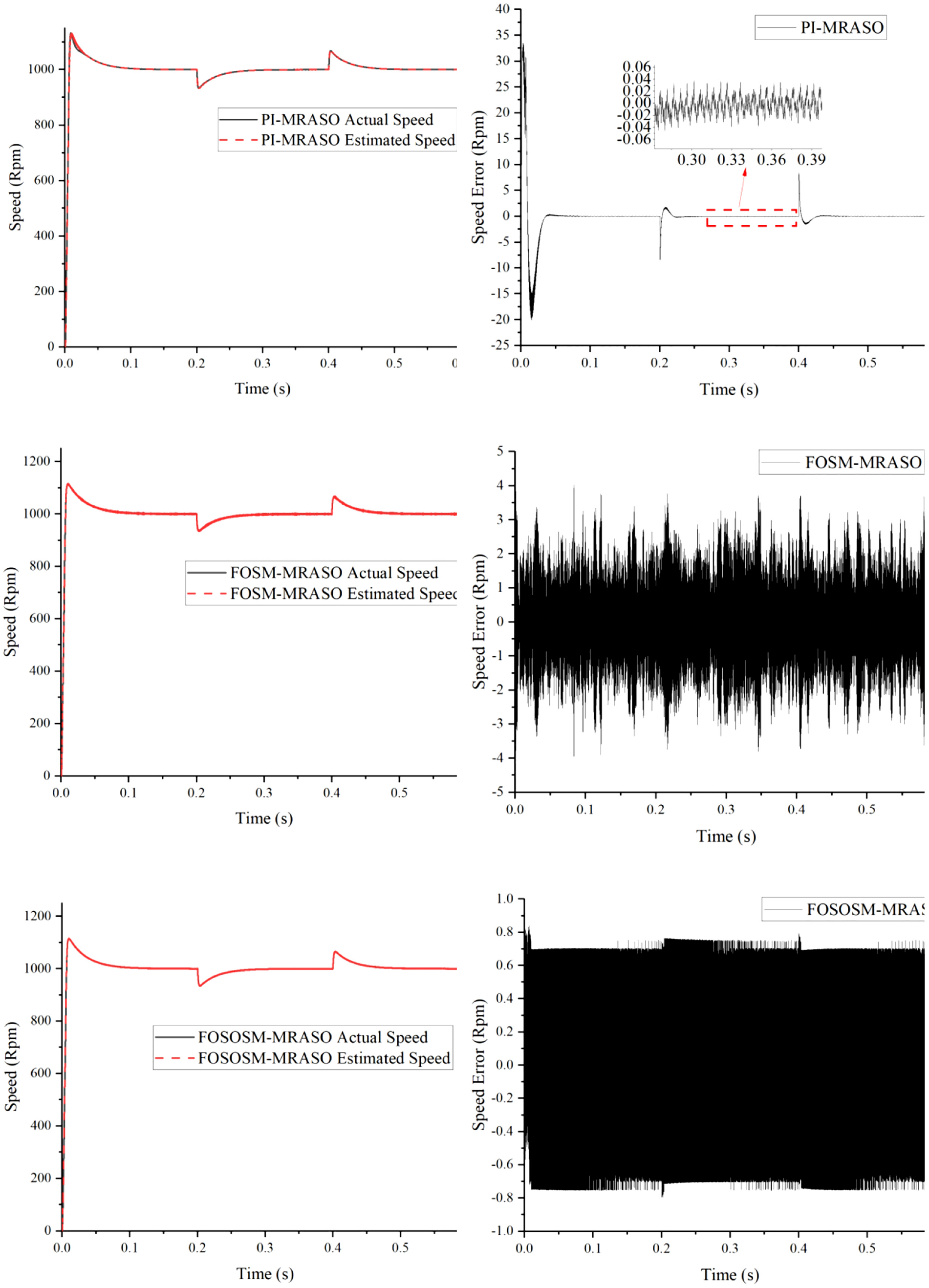
The system speed and speed error.
Conversely, with the incorporation of fractional-order integral sliding mode control within the MRASO framework, the system demonstrates a remarkable ability to achieve real-time tracking of the actual speed and position while exhibiting substantial resilience against disturbances. However, it’s important to note that the presence of chattering phenomena results in slightly larger speed and position errors compared to the PI-MRASO. As depicted in Figures 2 and 3, a noticeable improvement is observed when the second-order sliding mode reaching law is introduced in FOSM-MRASO. This enhancement substantially reduces both speed and position errors, effectively mitigating the chattering phenomenon and elevating the overall control precision of the system (Figure 4).
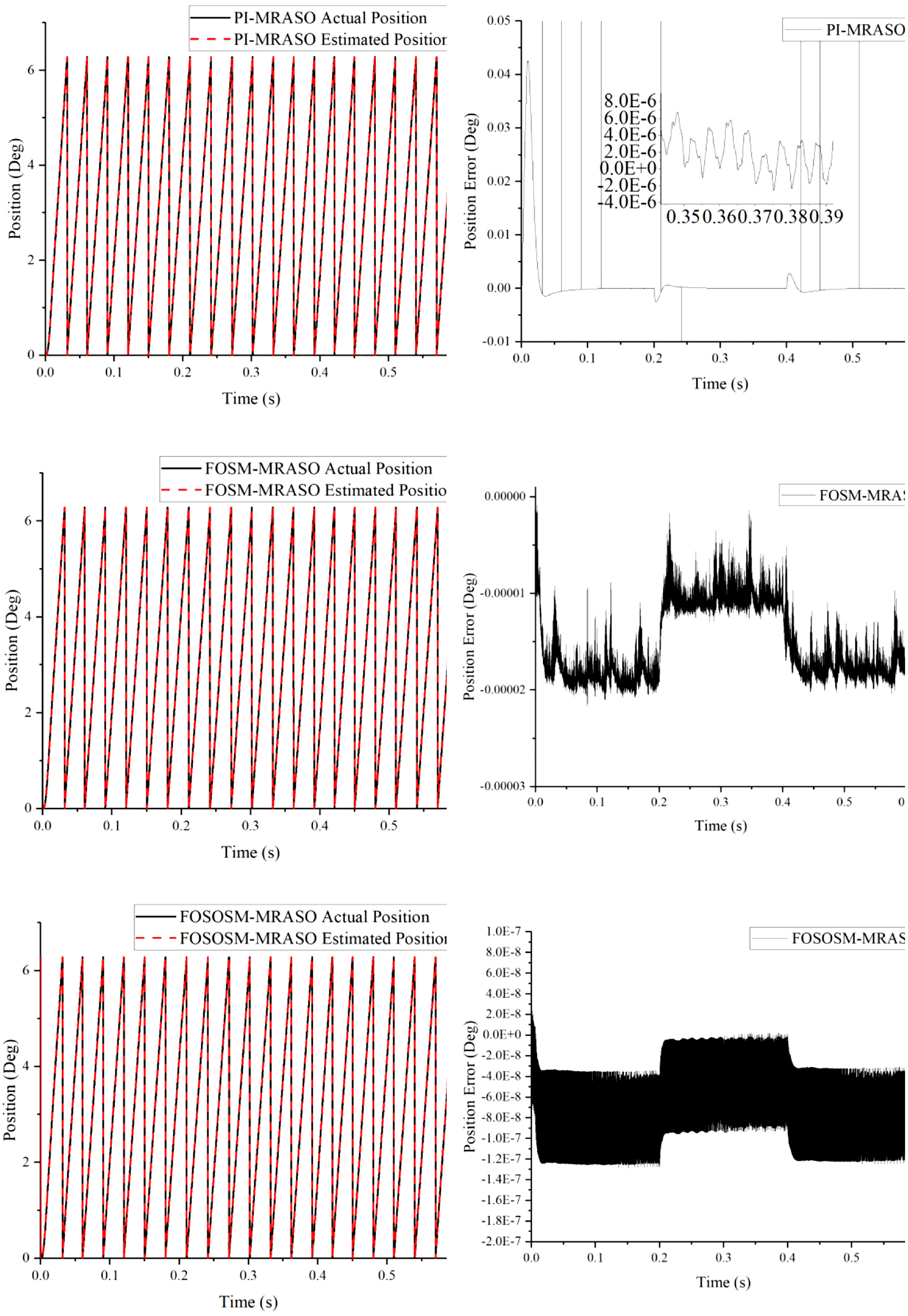
The system position and position error.
Conclusions
This paper focuses on the PMSM sensorless estimation accuracy problem, and the research conclusions are as follows:
Integrating sliding mode control with MRASO and formulating a fractional order integral sliding mode surface to guarantee the efficient convergence of stator current errors, thereby enhancing the system’s resistance to disturbances while maintaining its stability;
Addressing the issue of chattering in sliding mode control, this paper introduces the second-order sliding mode reaching law to mitigate chattering and demonstrate system stability through the use of a quadratic-like Lyapunov function. This approach enhances the precision of system control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the key scientific research project of Henan Province’s higher education institutions (22A520050).