
Abstract
Temperature stability is a critical factor affecting the performance of the most subsystems in the lithography system, due to the high precision and sensitivity of system components to temperature variations. The temperature control system of the lithography machine is characterized by its large inertial constant, time delay characteristics, as well as susceptibility to multiple disturbances. The temperature control system of the lithography machine chiefly requires response speed, high accuracy, and stable and constant temperature control. The contribution of this study is not only avoiding complex precision modeling processes based on real-time parameter estimation and neural network self-tuning but also improving the performance of temperature control in real time under external disturbances. A novel adaptive algorithm with a cascade structure based on generalized predictive control (GPC) and backpropagation (BP) neural network proportional-integral (PI) control is successfully proposed for high accuracy temperature control of lithography machine with a large inertial constant, time delay, and multiple disturbances. In this study, firstly, the liquid circulating temperature control system is developed based on heat exchanger and heater. Secondly, an adaptive controller composed of GPC and BP neural network PI control is successfully proposed. A BP neural network is employed to enable the parameters of the PI controller to adjust in real time, and the mathematical model parameters of the control system are identified in real time by the least square method. Also, the performance of the proposed controller is evaluated comparing with conventional PI controller and GPC controller in terms of robustness and quantitative study of error analysis. Finally, the temperature stability and robustness of the temperature control system controlled with the proposed adaptive GPC-PI algorithm has been investigated by the simulation results carried out in different working scenarios. The simulation results show that the steady-state error from the proposed algorithm is less than 0.01°C under the action of disturbance input. It can effectively counteract the influence of environmental interference and time-varying system parameters. The results of the simulation experiment indicate that the proposed adaptive GPC and PI control algorithm exhibits significant advantages in terms of control accuracy, anti-interference ability, and robustness compared to the conventional control method.
Introduction
The lithography machine is the key equipment in the semiconductor manufacturing industry. Its performance directly determines the feature size of the integrated circuit. Generally, resolution, overlay accuracy, and productivity are the main indexes of the lithography system. With the development of semiconductor manufacturing industry, the lithography machine needs to continuously improve the performance to meet the demand of the gradually shrinking feature size of the integrated circuit chip. The lithography machine is extremely sensitive to environmental disturbances, among which temperature fluctuation is the main factor that reduces the performance of the lithography system. 1 Even though the lithography system operates in a clean room environment with a relatively constant temperature, there are still many internal thermal sources, including various light sources, motors, mechanical friction, and so on. These internal thermal sources will cause local temperature fluctuations in the lithography system. Temperature fluctuations will cause material deformation, fluctuations in the refractive index of the medium, and reduced stability of precision measuring instruments.2,3 It will cause optical aberration, and affect the accuracy of leveling and focusing. 4 A highly accurate and stable constant temperature control is essential for the lithography system, and the temperature stability requirement of the projection lens and the laser interferometer in the lithography is at least within the range of ±0.01°C. 5
Generally, the problem of large inertial constant, time delays, and multiple disturbances are the main challenges faced by temperature control system. The combination of control algorithms, such as fuzzy control,6,7 genetic algorithm, 8 neural network control,9,10 feedforward control,11,12 and Smith predictor 13 with PID control algorithms, is a common used approach at present. Moreover, the integration of intelligent control strategies, such as fuzzy algorithms 14 and iterative learning control, 15 with advanced techniques like predictive control, holds significant promise in addressing challenges encountered in industrial control systems like time delays 16 and external disturbances. By synergistically utilizing multiple control strategies, not only the dynamic performance of the system can be enhanced, but also its overall stability can be improved. For the temperature control in lithography, Zhang et al. 17 proposed an algorithm for the temperature control of the projection lens based on the prediction algorithm. The output of the controlled plant is estimated by the prediction algorithm, so as to switch the appropriate control algorithm. The simulation results show that the system achieves temperature stability within ±0.1°C. Nie et al. 18 proposed a nonlinear PI control algorithm, which divides the control process into multiple modes, and uses decision algorithms to switch different modes. The proposed algorithm reduced the settling time and steady-state error, it achieved ±0.006°C temperature stability for projection lens. Similarly, Li et al. 12 studied a multimodal intelligent nonlinear PI algorithm with a cascade structure. The algorithm also combines the Smith predictive algorithm and the feedforward algorithm to against time delays and disturbances. The steady-state error of the lithography immersion liquid temperature is less than ±0.008°C. The proposed algorithm has been successfully applied in the lithography equipment. Wang et al. 19 introduced a multimodal temperature control algorithm that effectively switches among different control algorithms based on temperature deviations. In addition, a fuzzy algorithm was utilized to achieve PID parameter self-tuning, resulting in improved dynamic performance and enhanced robustness. The fluctuation of the circulating water temperature was kept within a range of ±0.01°C. Qin et al. 11 studied a compound control algorithm that combines model prediction, feedforward control and Smith predictor. It achieved a fast response speed and ±0.01°C temperature control accuracy of projection lens.
Although the above studies have achieved good results in the temperature control of the lithography system, there are some limitations, such as the complexity of parameter tuning and poor robustness. Nie et al. 18 did not address the research on disturbance rejection or robustness, and Qin et al. 11 are currently addressing the problem of measurable disturbances such as thermal disturbances of laser light sources. However, further researches are needed to control partially unmeasurable or ill-characterized disturbances. The dependence on accurate system modeling and the difficulties in controlling partially unmeasurable or poorly characterized disturbances are common challenges in temperature control of the lithography system. An improved cascade control algorithm is proposed in this paper, which is characterized by a generalized predictive control algorithm based on the least-squares method for real-time estimation of system parameters. Uncertainties in the system, such as disturbances and parameter changes, can be sensed by real-time parameter estimation and their effects can be suppressed in time by modifying the predictive model. In addition, the proposed algorithm achieves precise control of the water temperature in the sub-control system by utilizing neural network PI control. The complex modeling process is avoided, the influence of disturbances is effectively suppressed, and the steady-state temperature error of the thermal load is controlled within 0.01°C.
The control algorithm
The temperature control system
The structure of the temperature control plant is shown in Figure 1. The heat exchanger is used to cool the circulating water to the set value
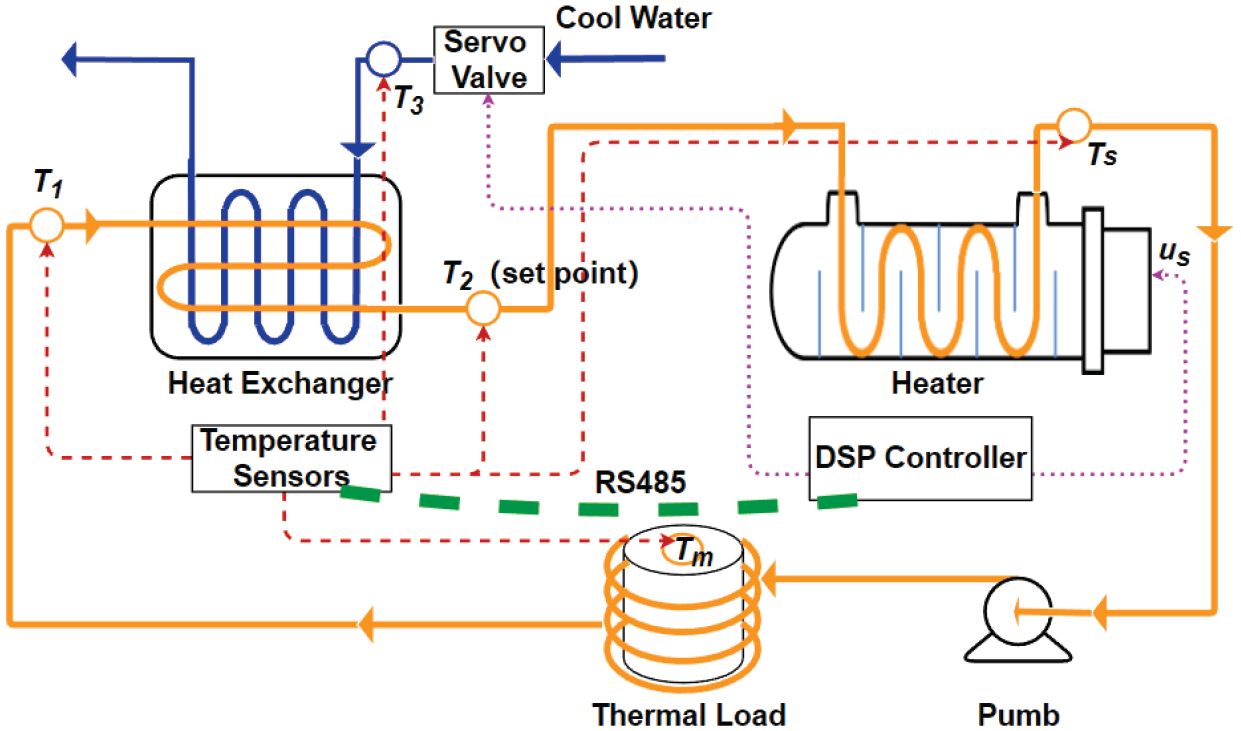
Structure of the temperature control system.
A system with too long circulating loop would cause long time delays and environmental interferences. Besides, changing of circulating water flow or instrument thermal status will cause parameters varying. To address these issues, a temperature control algorithm is proposed in this paper, which is composed of adaptive generalized predictive control and proportional-integral (PI) control based on backpropagation (BP) neural network. A BP neural network is employed to enable the parameters of the PI controller to adjust in real time, while the mathematical model parameters of the control system are identified in real time by the least square method. The configuration of the controller is cascade control, and the cascade control system can effectively accelerate the response speed, and enhance the anti-interference ability. As shown in Figure 2, the proposed cascade control system includes a main control system and a sub control system. In the main control system,
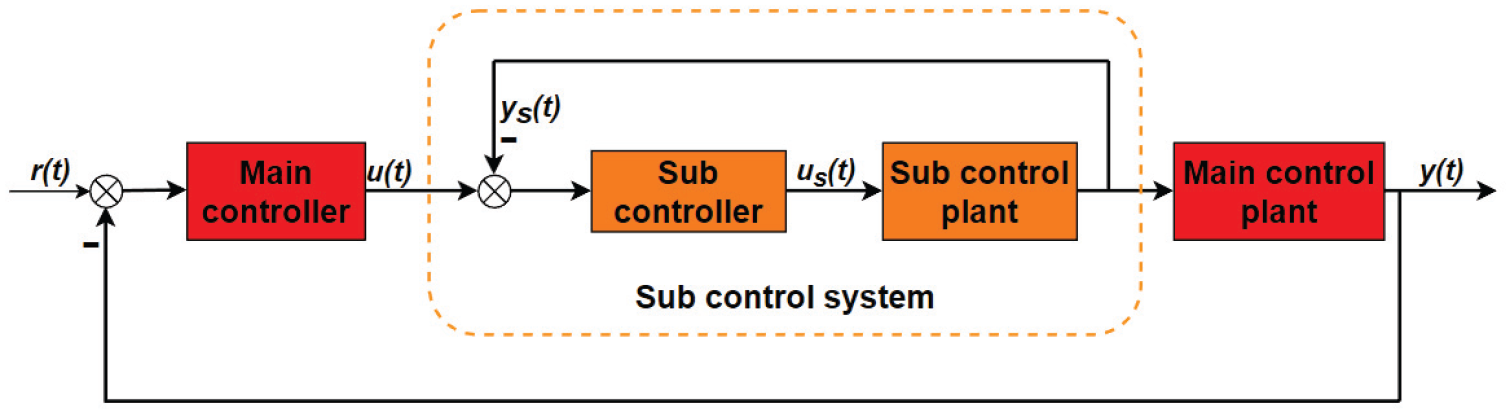
Framework of temperature control method.
The main control system is a constant control system. The main control plant usually has the characteristics of large inertia constants and time delays. The generalized predictive control algorithm has excellent adaptability and strong robustness by predicting and estimating the state variables of the system in real time, making it suitable for the control of slow dynamic processes. In this paper, the main control algorithm has been determined as generalized predictive control, which achieves high control accuracy, suppresses environmental disturbances, and resists the influence of slow time-varying mathematical model parameters. 20
The temperature of the circulating water is a sub control variable. The reference input of the sub control system is equal to the control signal
Modeling of the system
Modeling of the sub plant
Under the ideal condition, the heat exchange between the external environment and the temperature control system can be ignored, according to the thermodynamic equation of water, the differential equation of the heater can be expressed as the following formula:

Where
Let


Where
Modeling of the main plant
The thermal load of the lithography system is chiefly characterized by its non-linear due to switching between heating and cooling processes, long time delays due to large heat capacities and long circulation loop, disturbances, and parameter uncertainties from environmental changes. The temperature control system of thermal load can be described by the following differential equation:
Where
To achieve accurate modeling is very difficult, its simple modeling can ignore its nonlinearities and perturbations, equation (4) can be further simplified, and its model can be described by the transfer function as:

Where k and c are the coefficients of the transfer function,
In the same way, the temperature response mathematical model of the thermal load of the lithography system can also be described as a first order inertial element plus a pure time delays.
The main controller based on generalized predictive control
The generalized predictive controller (Generalized Predictive Controller, GPC) is suitable for a nonlinear system that is difficult to establish a precise mathematical model. 11 Besides, it has superior control performance and robustness.21,22 Figure 3 shows the principle of the generalized predictive controller. As illustrated in Figure 3, GPC predicts the system output by constructing a prediction model based on the identified mathematical model parameters, the control signal is obtained by optimizing a performance index.23,24 The mathematical model parameters of the plant under control are identified by the least square method. The updated parameters can be used to modify the predictive model in real time, it effectively reduces the influence of parameters time-varying and multiple disturbances.
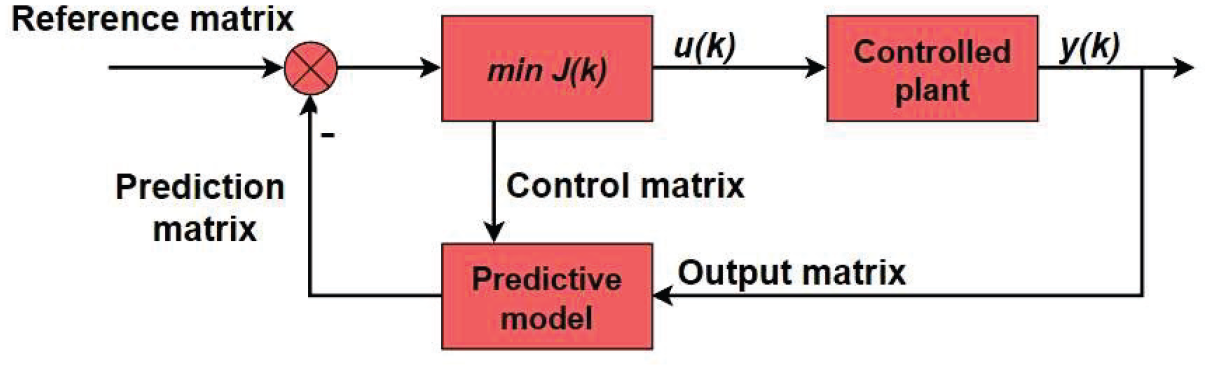
Principle of generalized predictive control.
The CARMA model (Controlled Auto Regression and Moving Average model, CARMA) of the controlled plant can be expressed as:

Where
The output prediction model of the system can be expressed as 24 :

Where

Choose a performance index

Where
Let the partial derivative of the performance index

The control law can be expressed as:

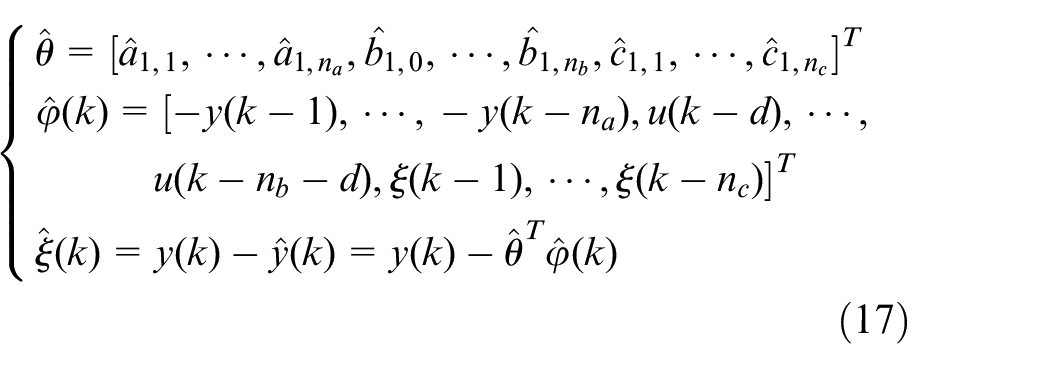
In order to enhance the adaptive ability of the system, the least square method will be used for parameter identification of the controlled plant. The parameter estimation formula is as follows:
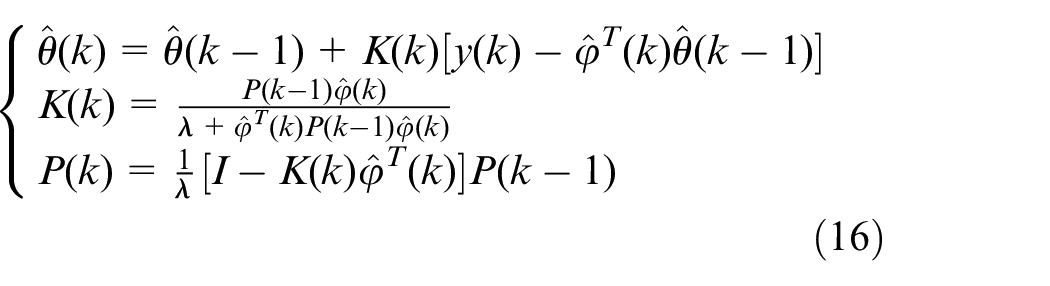
Where
The sub controller based on neural network PI control
Figure 4 shows the principle of the neural network proportional–integral–derivative (PID) controller. The weight coefficients of the neural network are updated in real time through training and learning. The PID controller parameters are adaptively adjusted in the control process. The controller is insensitive to interference factors such as environmental disturbances and parameters time-varying. The neural network PID controller exhibits excellent steady-state performance and robustness. The differentiation element of PID controller can improve the dynamic performance, but it will cause the high frequency disturbances of the system. In this paper, we choose PI control instead of PID control.
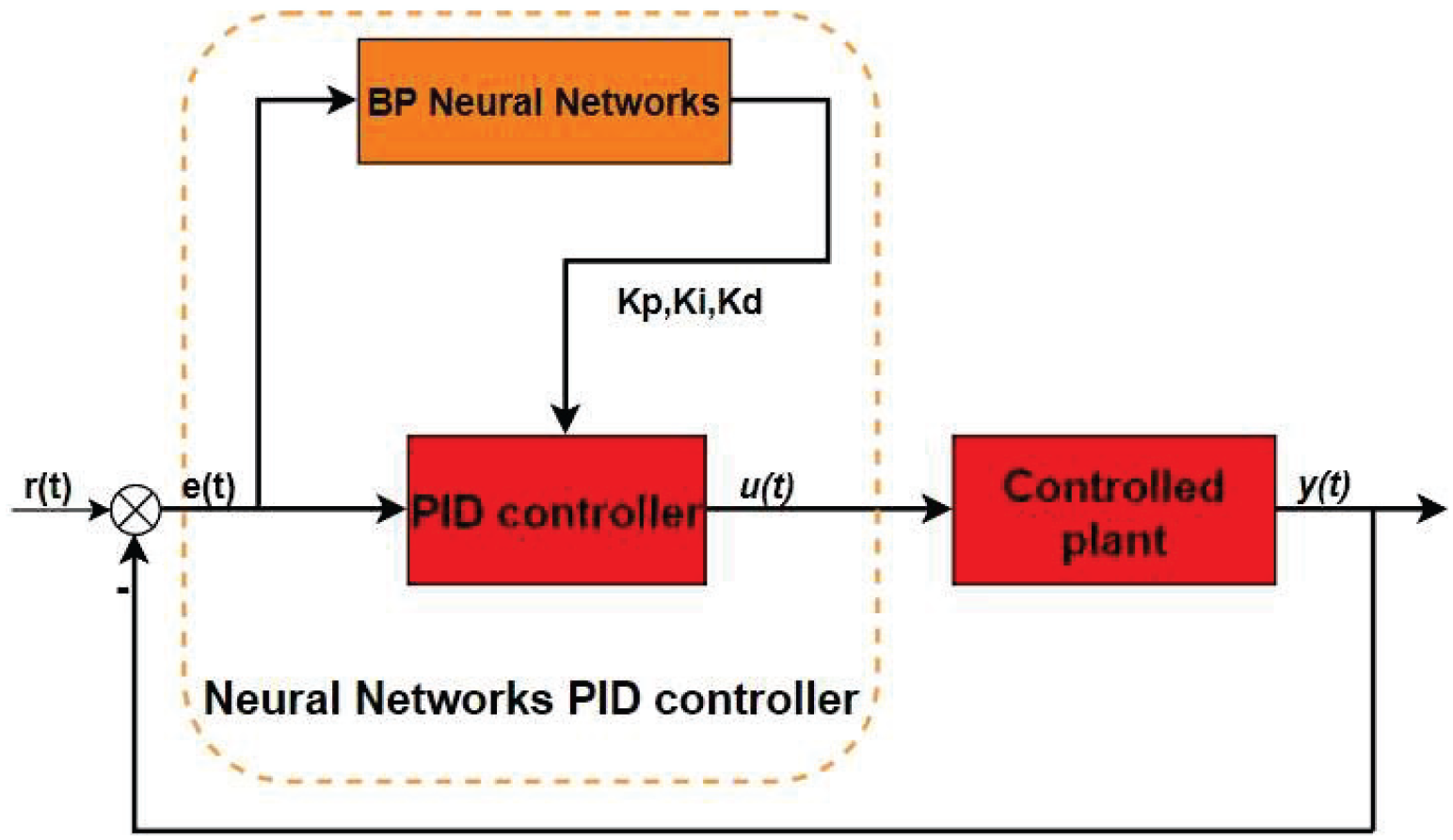
Principle of neural network PID controller.
The incremental PI control algorithm can be expressed as:

Where
As shown in Figure 5, it is a BP neural network with a three-layer structure.
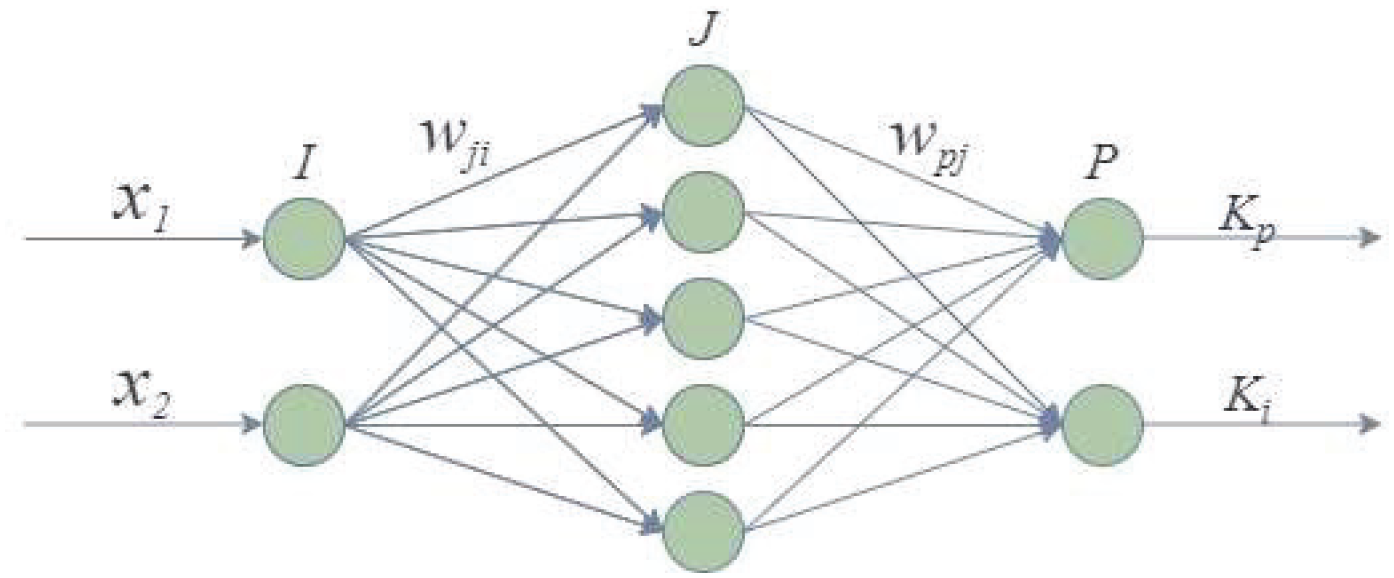
BP neural network structure.
The input of neural network can be expressed as:

The output of the neural network are the parameters
Input and output of the input layer can be expressed as:

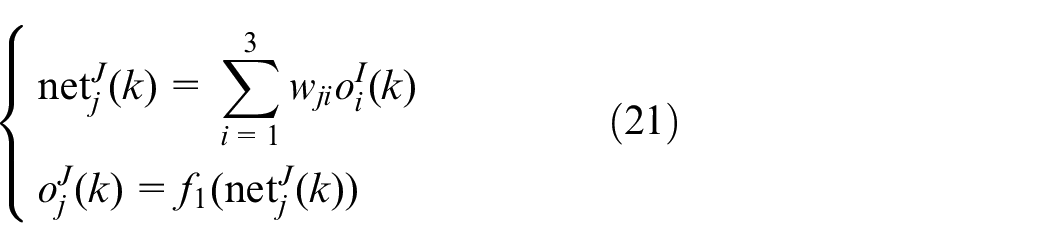
Input and output of the hidden layer can be expressed as:
Input and output of the output layer can be expressed as:
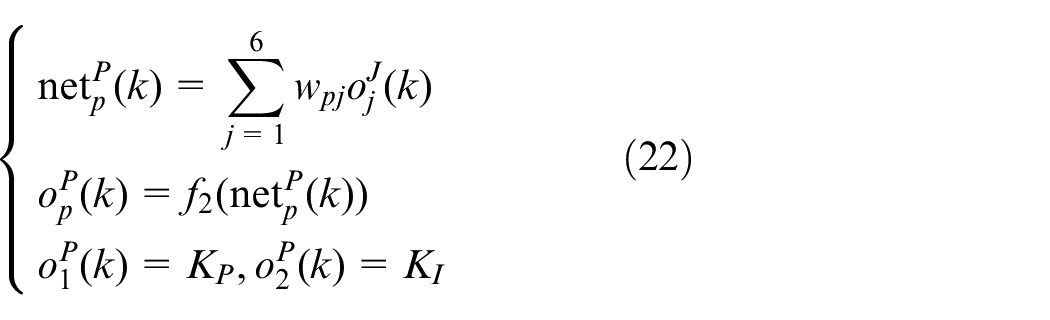
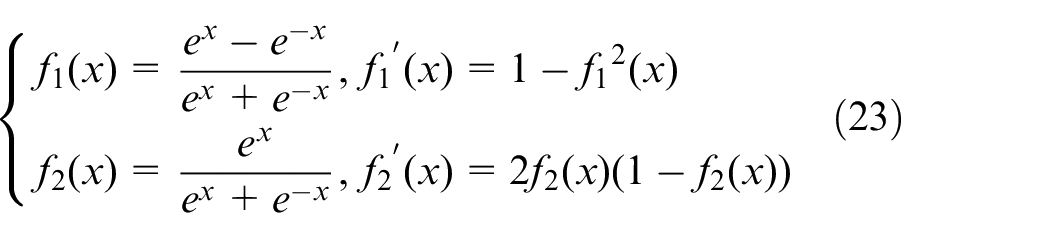
Where
The BP neural network is based on the error backpropagation (BP) algorithm. It uses the output error to estimate the error of the output layer, then estimates the error of the hidden layer based on the error of the output layer, thereby obtaining the error of each layer. 25 Finally, the weight coefficient of the network is adjusted according to the error of each layer. The core of the BP algorithm is the gradient descent method, and the performance index is taken as:

In order to minimize the performance index, BP algorithm is used to adjust the network weight coefficient. The weight coefficient correction formula from the hidden layer to the output layer can be expressed as:
Similarly, the correction formula of the weight coefficient from the input layer to the hidden layer can be expressed as:
Where
Simulation results and discussion
Consider the simulation plant which transfer function is shown in the following formula,
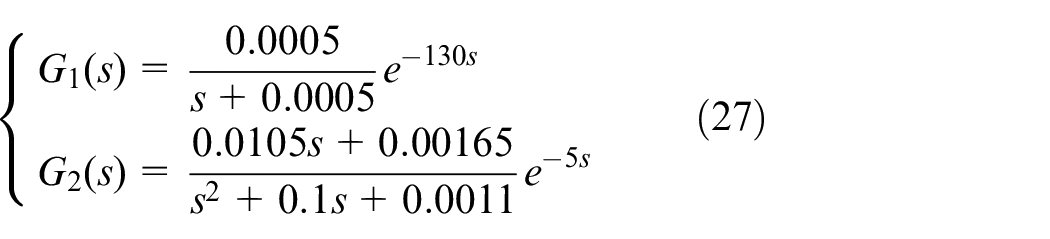
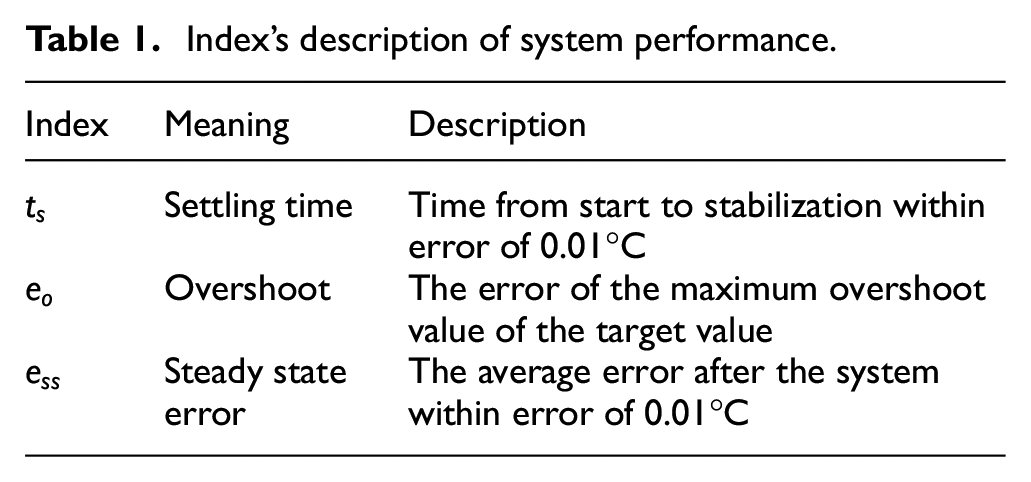
In this section, we simulate the proposed cascade control algorithm, which combines generalized predictive control and PI control (GPC-PI), as well as the PI-PI cascade control algorithm, on the mentioned plant. Additionally, the system model parameters were identified by using the least squares method, and the PI controller parameters were tuned using a neural network. Based on these techniques, an adaptive GPC-PI controller was designed. Besides, this paper will compare the differences in control performance between these three algorithms. The main performance indices, including settling time, overshoot, and steady-state error, are outlined in Table 1. These indices serve as common measures of control performance in the literature.
Index’s description of system performance.
The selection of these parameters has become an important aspect of research in the field of generalized predictive control.27, 28 When the time delays (d) can be determined, the minimum prediction horizon
Simulation result under disturbance
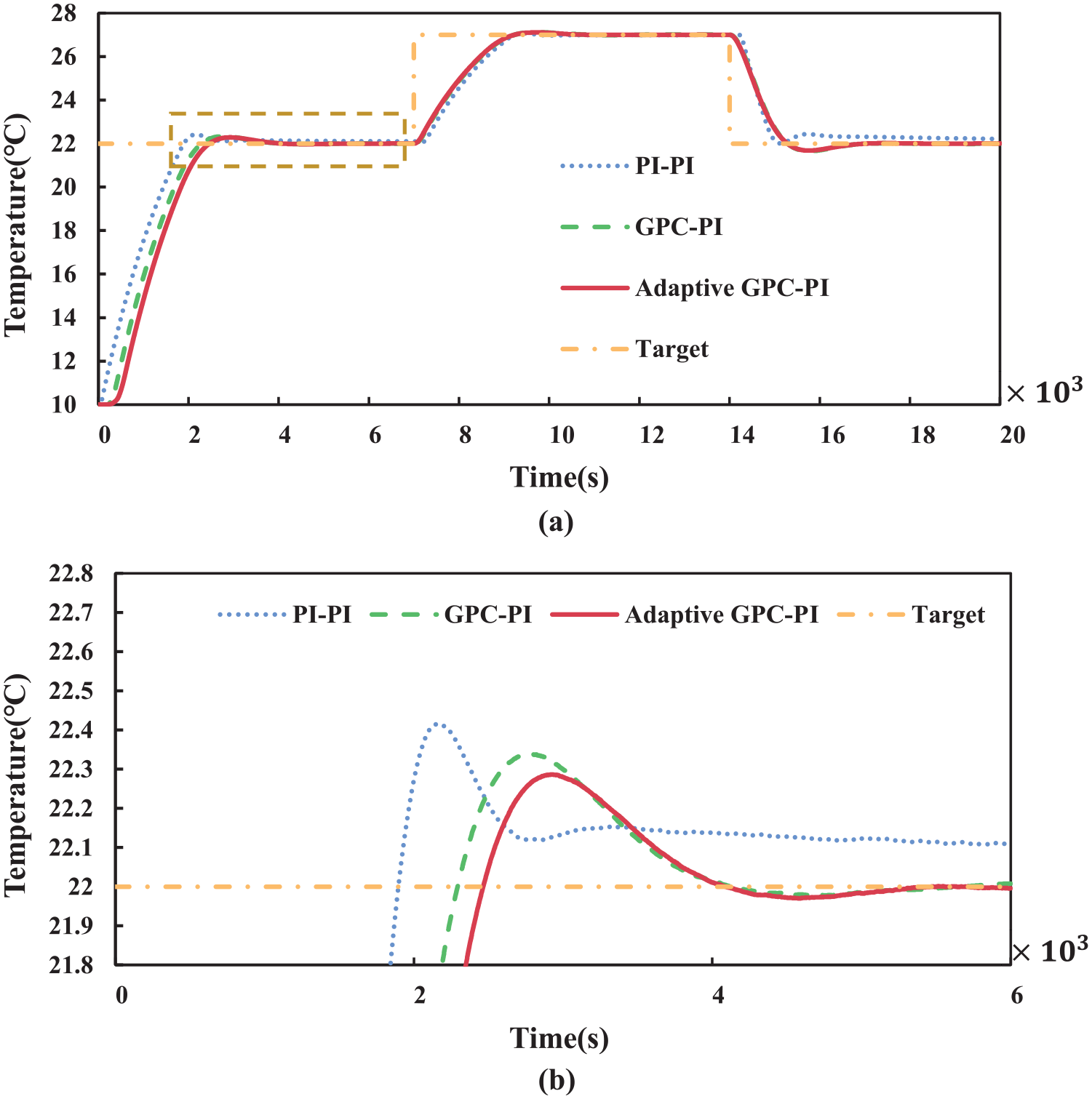
Figure 6 displays the simulation results and the comparison of the three methods. The main control indices of the three methods are listed in Table 2 for comparative purposes. Figure 7 depicts zoomed-in view of Figure 6, delineated by the dashed box.
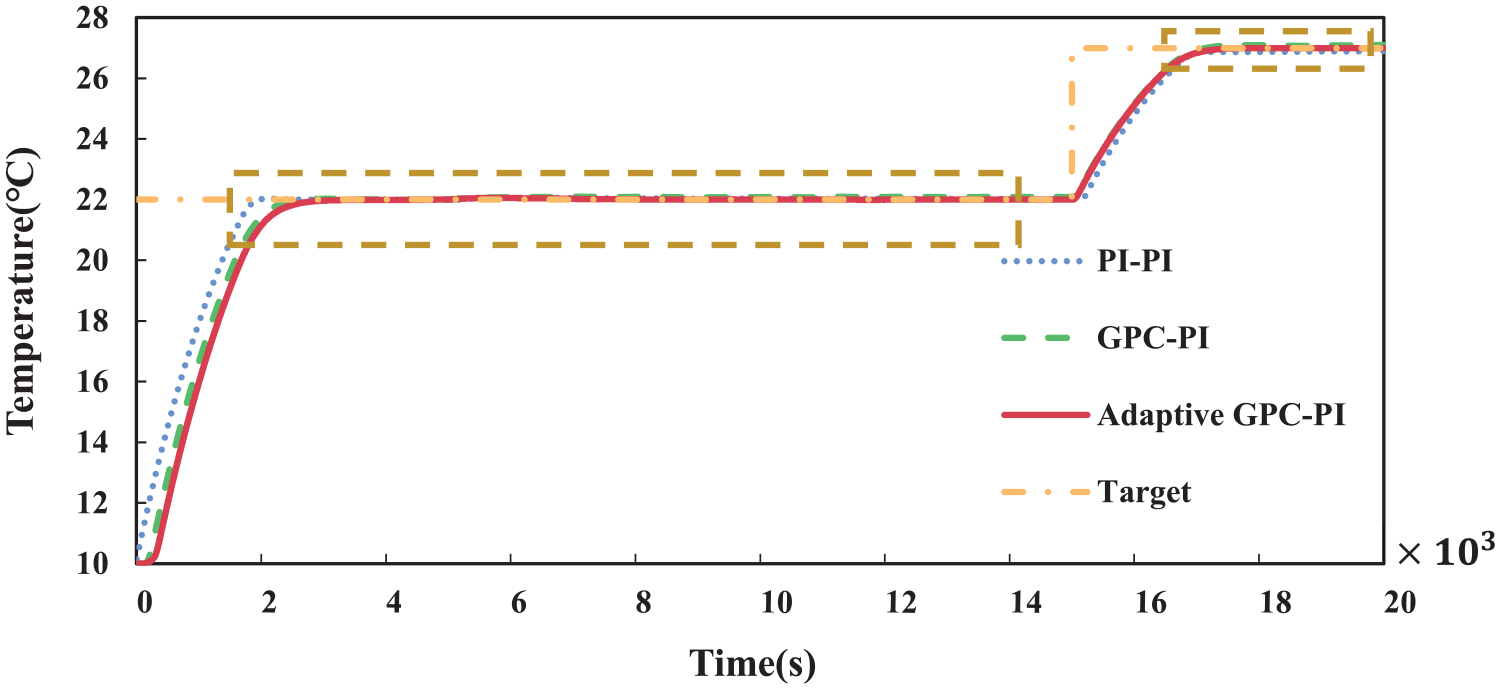
Temperature control performance.
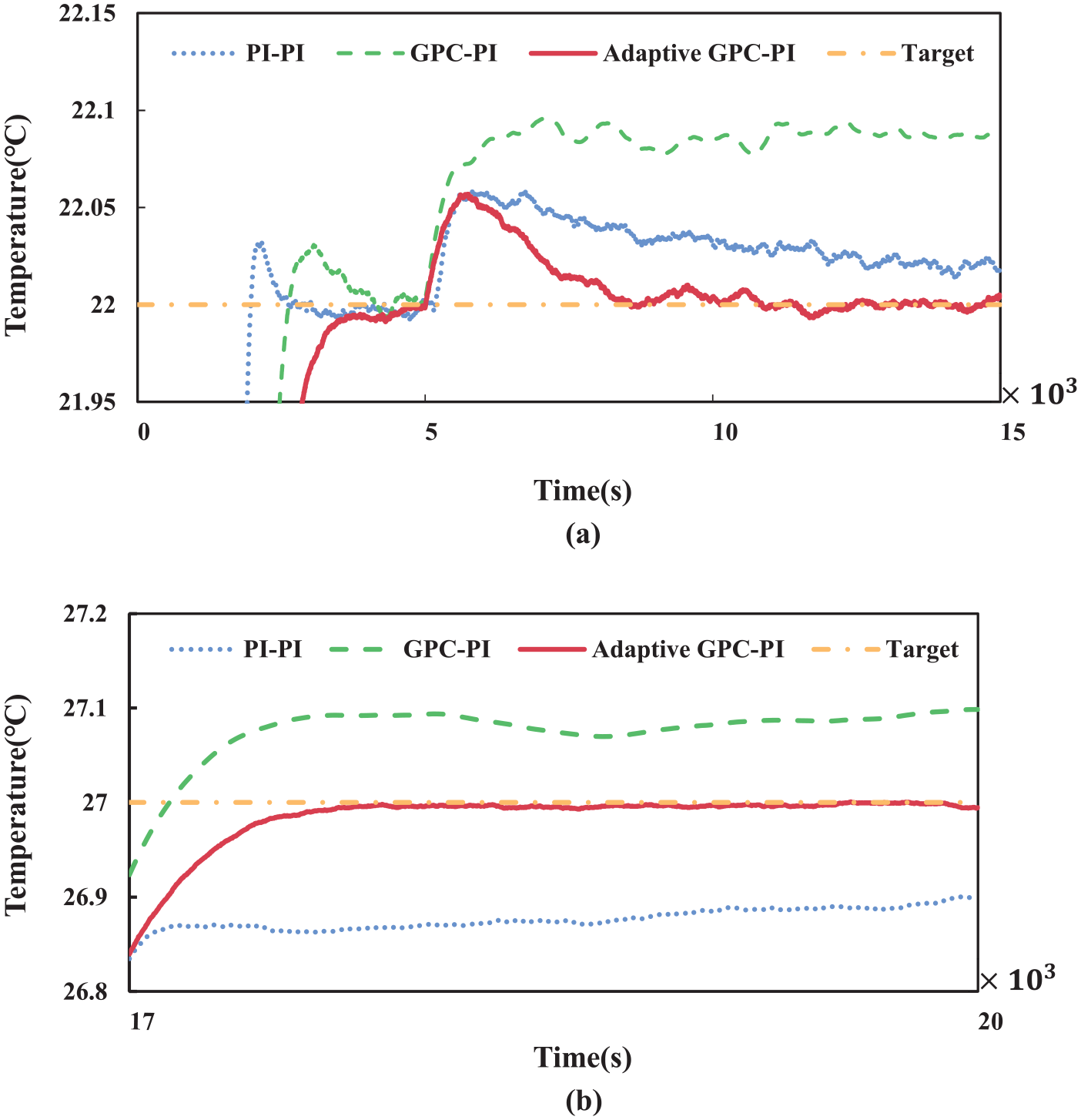
Temperature control performance: (a) temperature control performance while an additional step disturbance was added and (b) temperature control performance while the temperature gradient is changed to 27°C.
Comparison of temperature control results applying two methods.
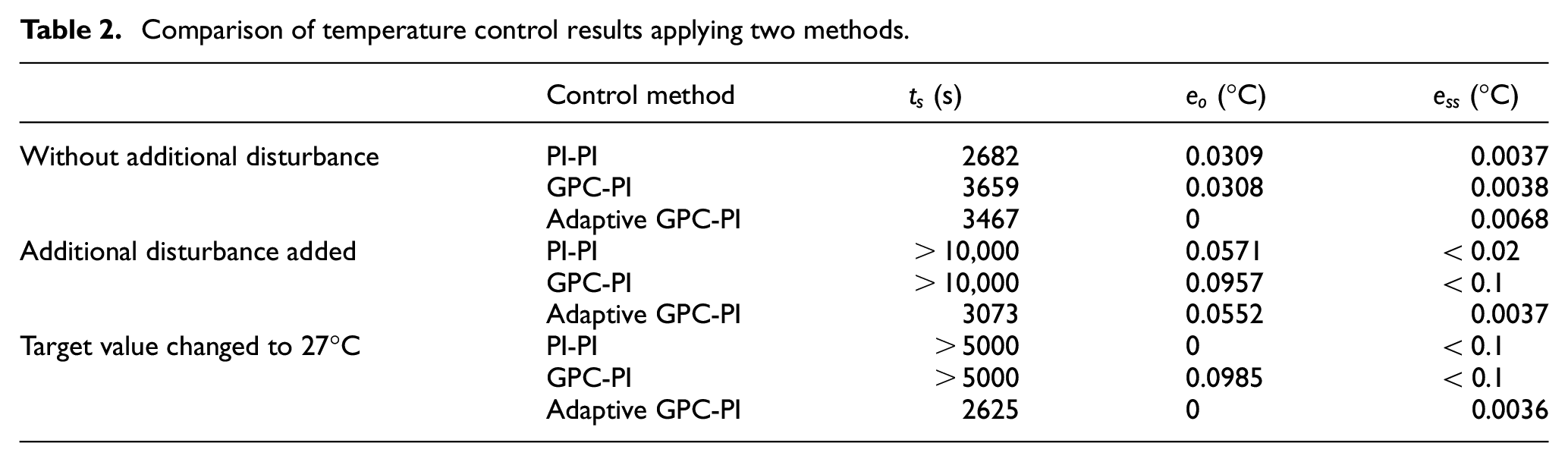
The settling time of the PI-PI algorithm is 1000 s shorter than that of the other two algorithms when the system operates without additional disturbances. When compared with the other two algorithms, the PI-PI algorithm causes an increase in overshoot by 0.0309°C and a steady-state error decrease by 0.0031°C. Moreover, all three control algorithms demonstrate a control accuracy better than 0.01°C, within an acceptable range.
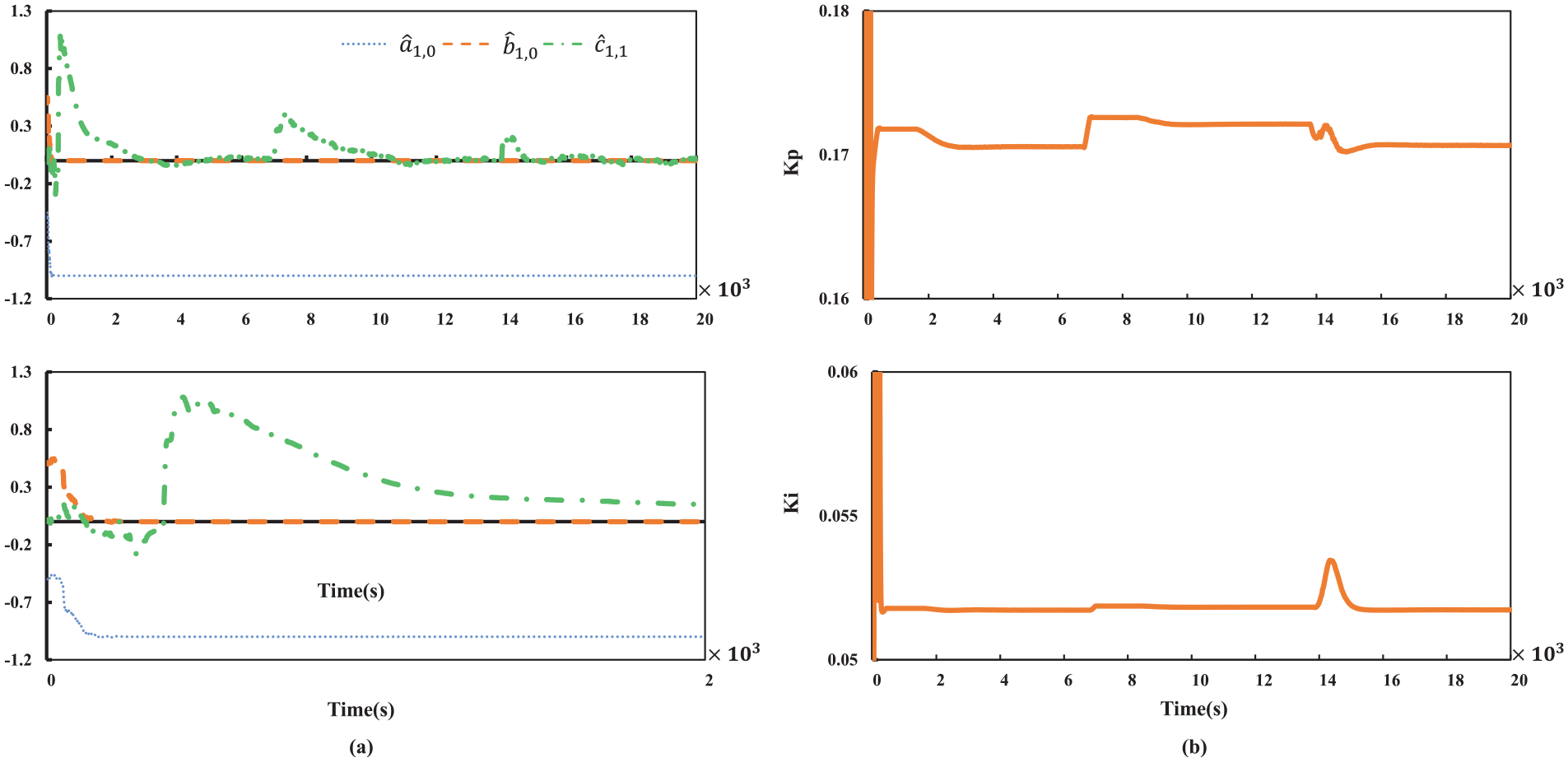
In actual operation, turning on instruments, such as CCD and drive motors, can generate thermal disturbances. In order to simulate this process, a step disturbance with an amplitude of 0.4°C is added to the main control system at the 5000th second. The overshoot of the GPC-PI system is about 0.0957°C. The overshoot of the adaptive GPC-PI system is 0.0552°C, nearly identical to the overshoot of the PI-PI system. The adaptive GPC-PI control system reduces temperature error to 0.01°C within 3073 s, while the PI-PI control system requires more than 10,000 s. The temperature error of the basic GPC-PI controller reaches 0.09°C, making it unable to achieve steady state. Meanwhile, the steady-state error of the adaptive GPC-PI controller is 0.015°C smaller than that of the PI-PI controller. Obviously, the overshoot of the two algorithms are almost same, but the adaptive GPC-PI algorithm has shorter settling time and steady-state error, which shows its stronger adaptive ability and anti-interference ability. In order to test the dynamic settling ability of the system, the temperature gradient is changed to 27°C at the 15,000th second. It can be found that the adaptive GPC-PI control system reverts to steady state within 2625 s, while the other two systems take longer than 5000 s to return to steady state. Figures 8 shows the evolution of identified parameter values and manipulated variables of the PI controller during the operation of the adaptive GPC-PI controller’s identification and neural network. The least squares method enables rapid identification of system parameters within 100 sampling cycles, while the BP neural network achieves PI controller parameter tuning within the same time limit.
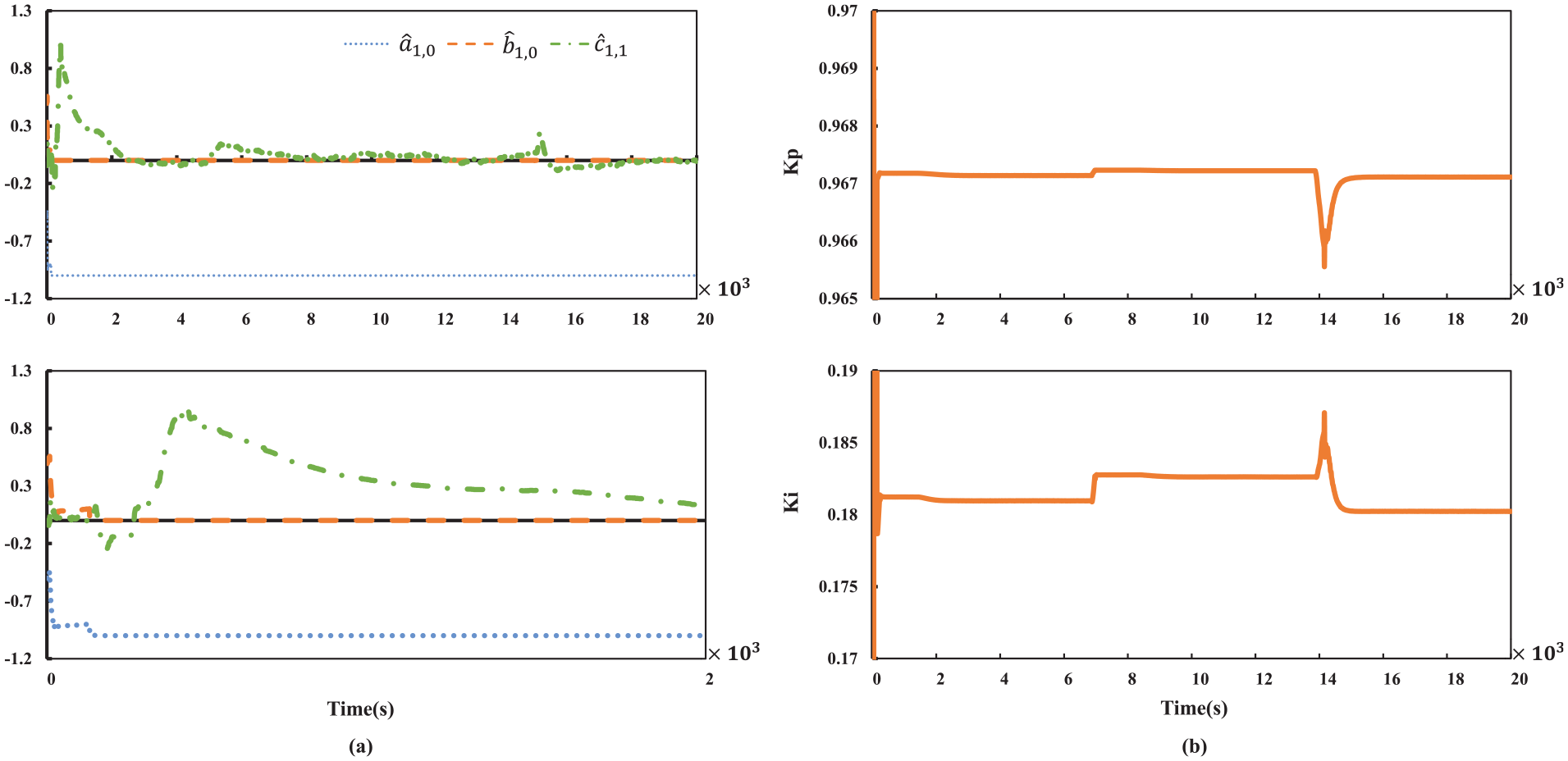
Evolution of the parameters when adaption works: (a) evolution of the identified parameters values and (b) Kp and Ki tuning process when neural network working.
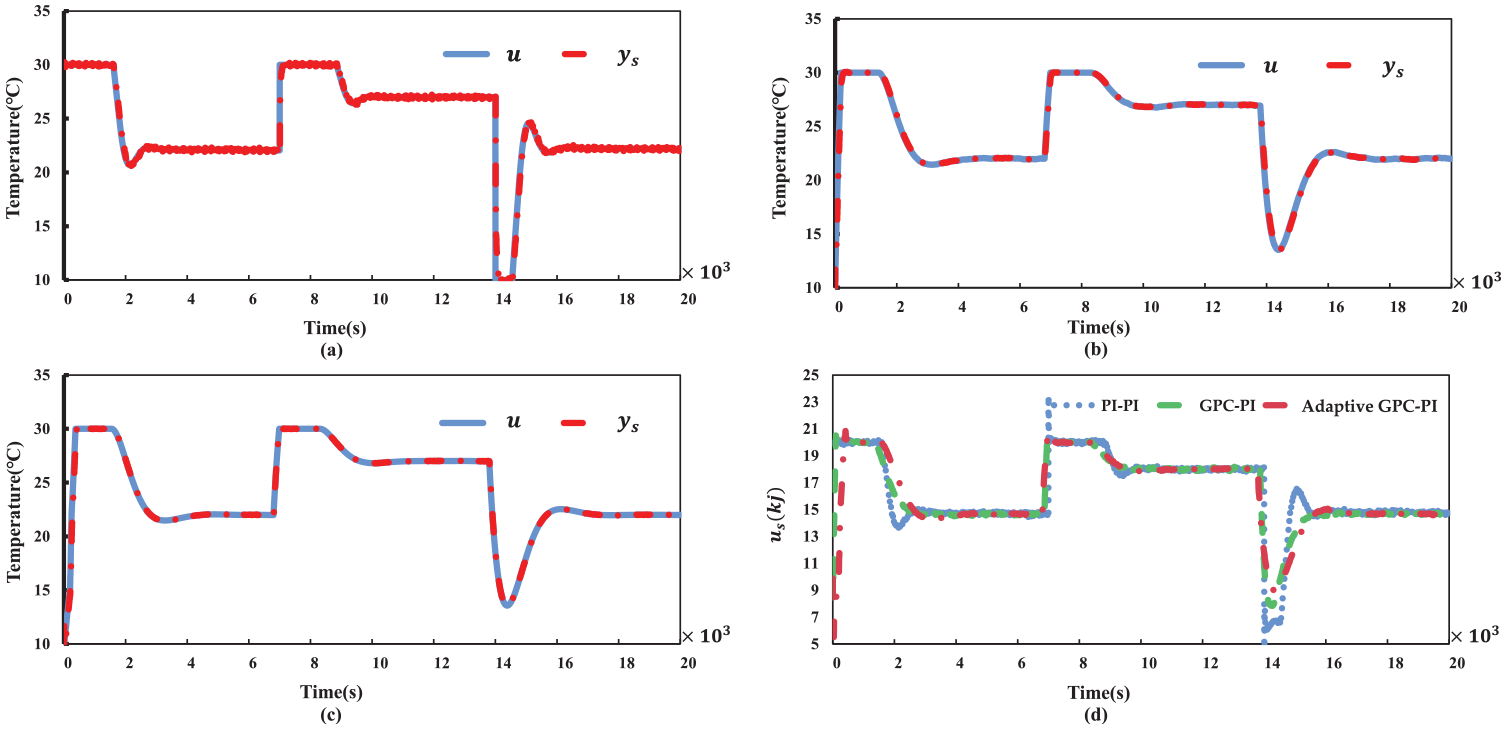
Figure 9 illustrates the comparison of the sub-control system temperature tracking performance and the tracking error among the three methods. It can be found that the BP neural network-based parametric adaptive PI controller achieves a good temperature tracking effect in the sub-control system, achieving a maximum error of less than 0.02°C, which is one third of that of the GPC-PI methods. Figure 10 illustrates the comparison of the sub-control system control signals
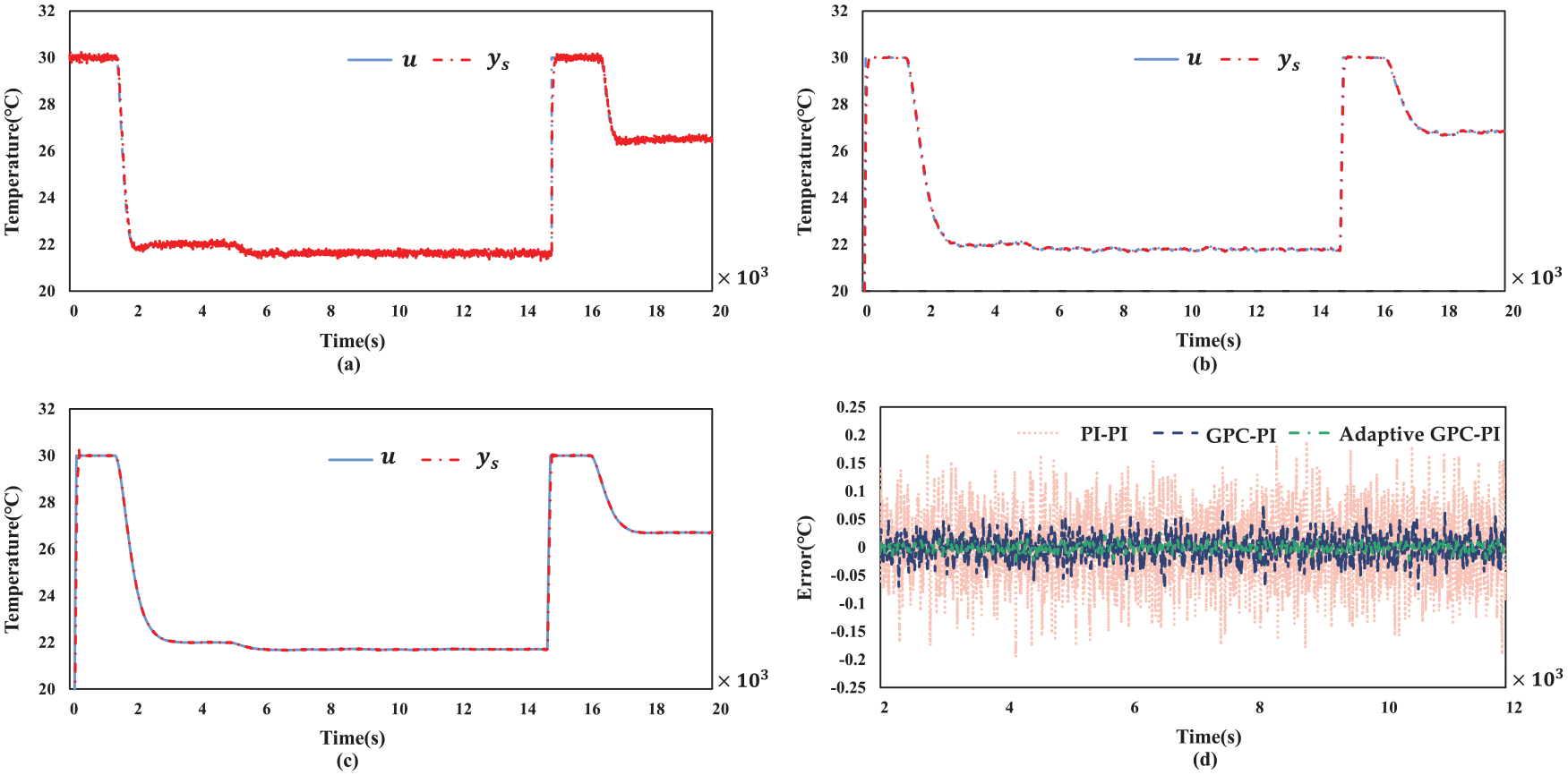
Sub-control system temperature tracking performance of the three algorithms: (a) tracking performance of PI-PI controller, (b) tracking performance of GPC-PI controller, (c) tracking performance of adaptive GPC-PI controller, and (d) comparison of sub-control system temperature tracking error.
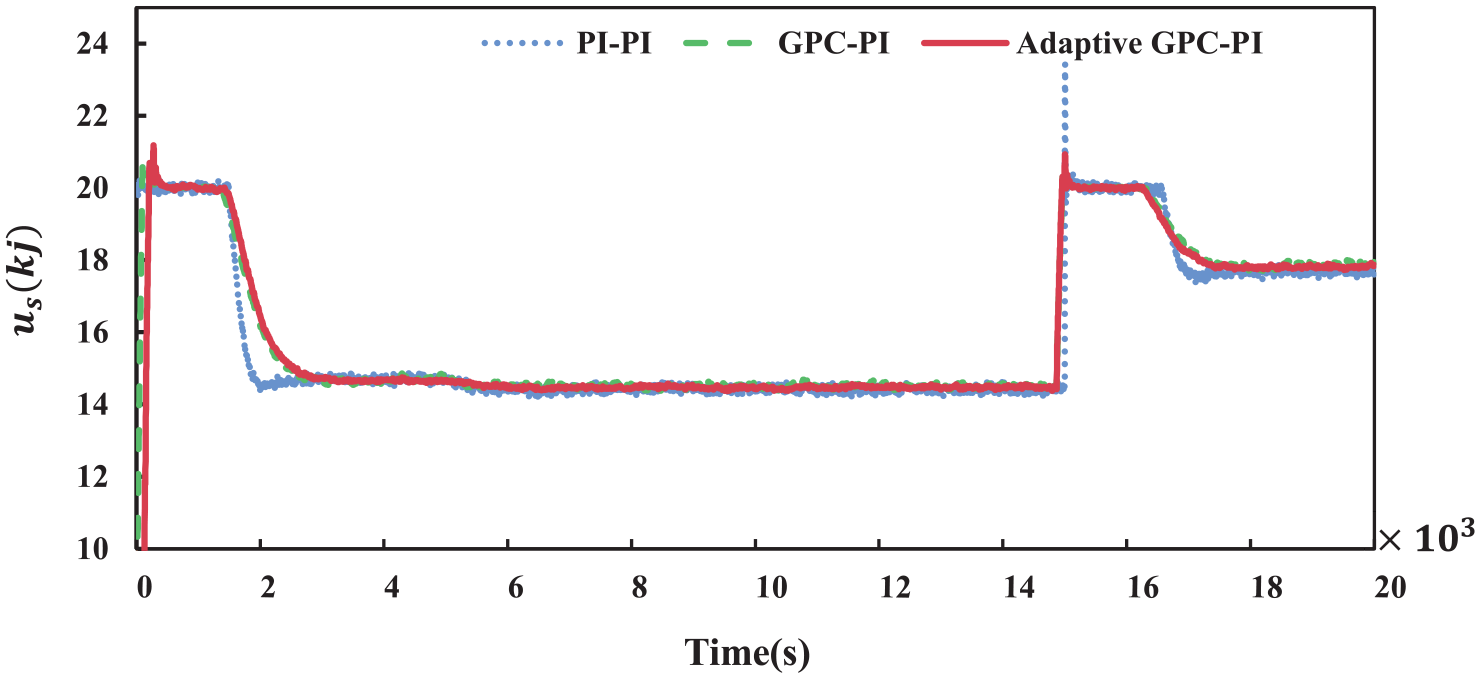
Evolution of the control signals
Based on simulation results, the PI-PI algorithm exhibits faster regulation, while the GPC algorithm demonstrates higher control accuracy when step disturbance is not taken into account. Under system disturbance, the adaptive GPC-PI algorithm exhibits stronger adaptive ability and can swiftly return to the steady state which indicates its superior dynamic tracking ability.
Simulation result of system robustness
The generalized predictive control algorithm has strong robustness. Robustness can be defined as when the structure or parameters of the mathematical model are variable, the controller still maintain excellent control performance to meet the requirements of the system. In this paper, the robustness of the adaptive GPC-PI cascade controller is studied by varying the parameters of the system mathematical model, such as time delays and inertial constant. Finally, the output responses of the three controllers under different conditions are analyzed and compared. In order to compare the three algorithms more accurately and comprehensively, three gradients of 22°C, 27°C, and 22°C were set.
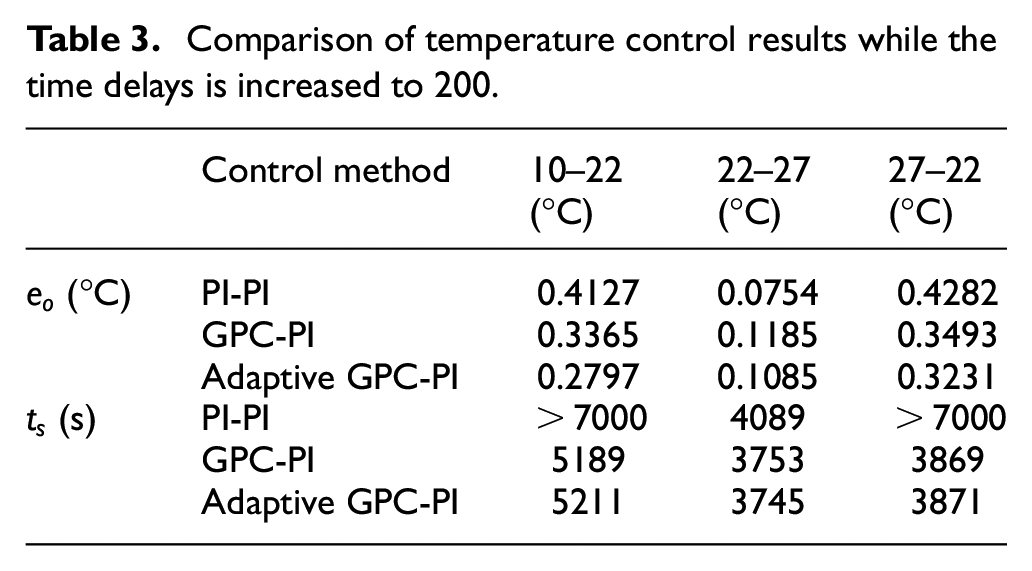
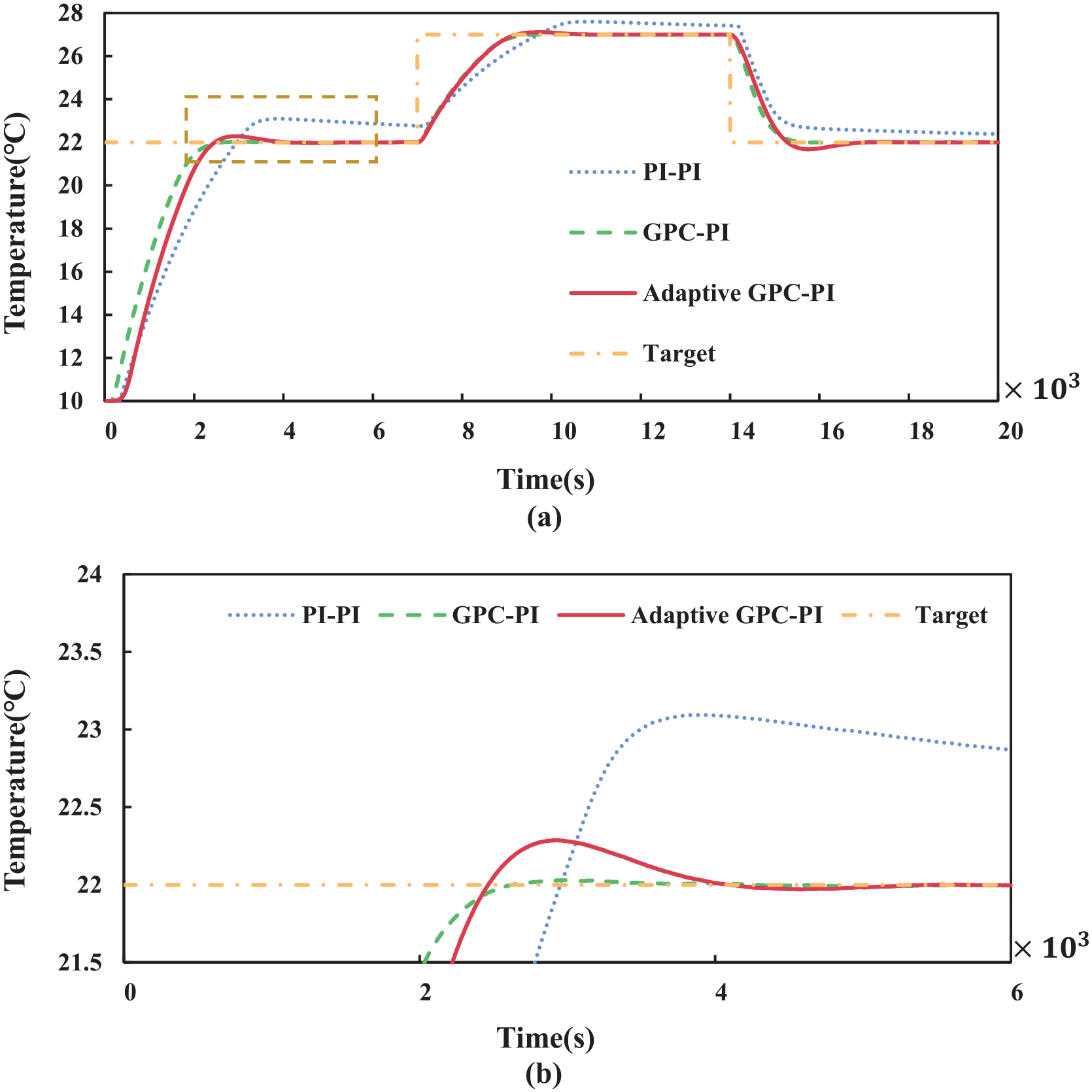
Figure 11 shows the simulation results of the three methods when the time delays of the mathematical model are increased to 200, Figure 12 shows the evolution of the parameter values during the identification and neural network processes, Figure 13 shows the evolution of the manipulated variables of the controller, and Table 3 shows the comparison of the main control indexes. In the first temperature gradient, the overshoot of the PI-PI controller is up to 0.4127°C, which is 0.0762°C more than the GPC-PI controller, and the tracking deviation is more than 0.1°C in the time limit of 7000 s. When the reference input is changed to 27°C and 22°C at time points of 7000 s and 14,000 s, respectively, the overshoot from the PI-PI controller is almost same with the other controllers. Compared to the basic GPC algorithm, when using the adaptive algorithm, the control performance slightly improves with regard to overshoot, and almost identical in other indicators.
Temperature control performance: (a) temperature control performance while the time delays is increased to 200 and (b) a zoomed-in view that delineated by a dashed box in (a).
Evolution of the parameters values while the time delays is increased to 200: (a) evolution of the identified parameters values and (b) evolution of the parameters Kp and Ki when neural network works.
Evolution of the manipulated variable and tracking performance of sub system while the time delays increased to 200: (a) tracking performance of PI-PI controller, (b) tracking performance of GPC-PI controller, (c) tracking performance of adaptive GPC-PI controller, and (d) comparison of sub-control system manipulated variable.
Comparison of temperature control results while the time delays is increased to 200.
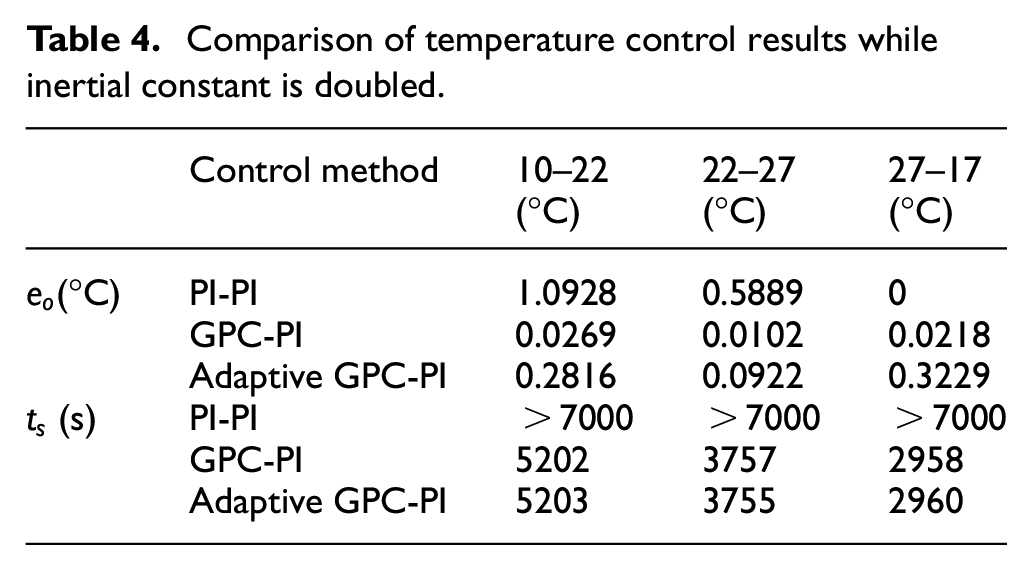
When the inertia constant of the system is doubled, the simulation results and comparison of the three methods are shown in Figure 14. Figure 15 shows the evolution of the parameters values and the manipulated variable when identification and neural network works. Figure 16 shows the evolution of the manipulated variable and tracking performance of the subsystem while inertial constant is doubled. The comparison of main control indexes is shown in Table 4. At each temperature gradient, overshoot of the PI-PI controller up to 4.95%, which is four times of adaptive GPC-PI controller. The controller with the GPC algorithm has a significant advantage in overshoot suppression. Furthermore, the settling time of the PI-PI controller greatly increases, and the error exceeds 0.8°C within the first 7000 s, unable to reach the steady state within the specified time limit. Both the GPC-PI controller and adaptive GPC-PI controller reach steady state in less than 5200 s. In terms of overshoot suppression, the GPC controller outperforms the adaptive GPC-PI controller. However, the adaptive GPC-PI controller and the GPC-PI controller exhibit almost identical settling times.
Temperature control performance: (a) temperature control performance while inertial constant is doubled and (b) a zoomed-in view that delineated by a dashed box in (a).
Evolution of the parameters values while inertial constant is doubled: (a) evolution of the identified parameters values and (b) evolution of the parameters Kp and Ki when neural network working.
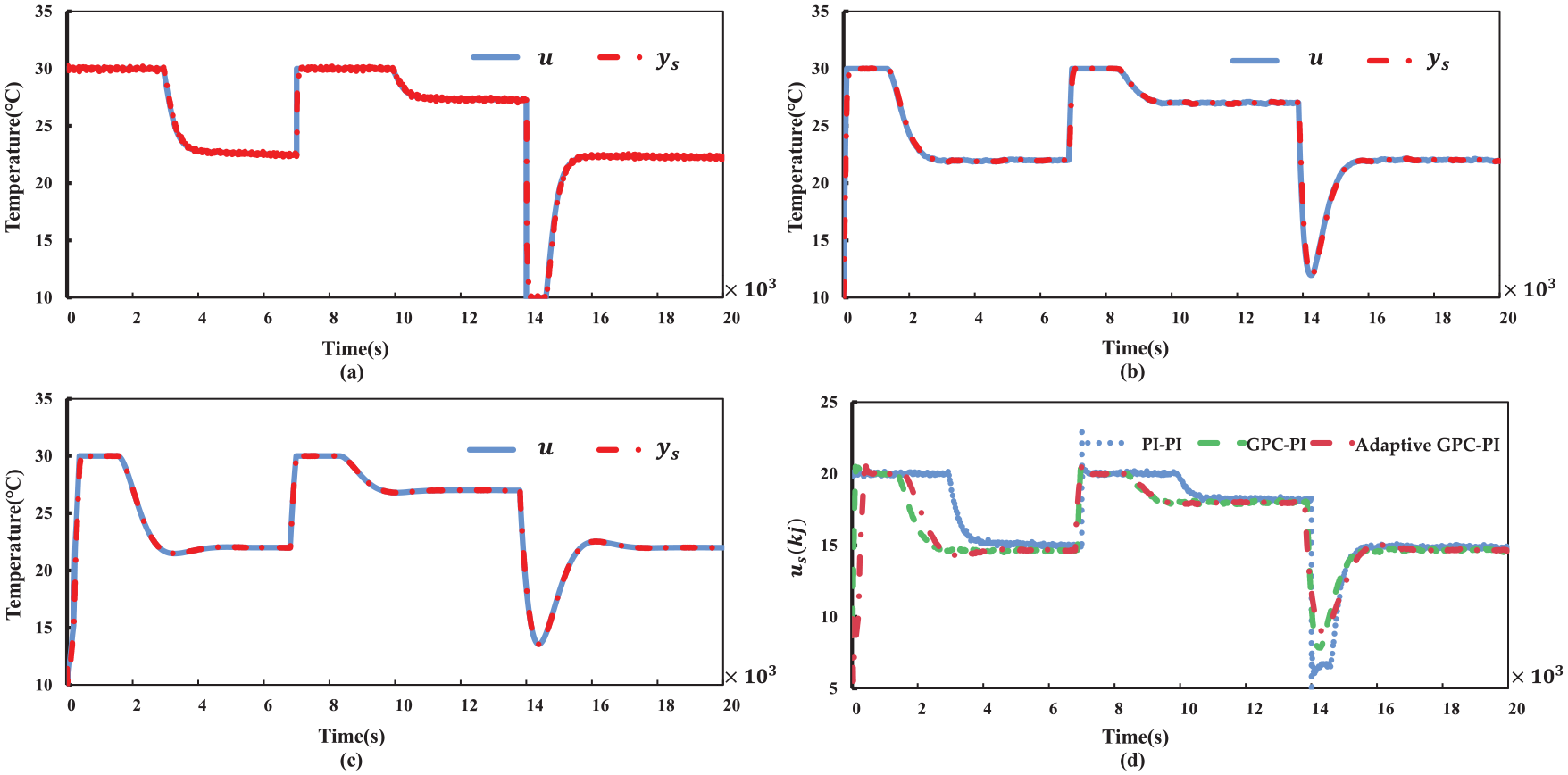
Evolution of the manipulated variable and tracking performance of sub system while inertial constant is doubled: (a) tracking performance of PI-PI controller, (b) tracking performance of GPC-PI controller, (c) tracking performance of adaptive GPC-PI controller, and (d) comparison of sub-control system manipulated variable.
Comparison of temperature control results while inertial constant is doubled.
By examining Figures 12 and 15, it is evident that the identified model parameters and the coefficient of the PI controller changed after the set-point changes. When the gradient is changing, the fluctuation of the identified parameters resulted from the adaptive algorithm will contribute to increased overshoot. However, benefiting from its adaptive ability, the adaptive GPC-PI controller can promptly reduce overshoot so that both the basic GPC-PI controller and the adaptive GPC-PI controller have nearly identical settling time.
The simulation results show that the proposed adaptive GPC-PI controller outperforms the PI-PI controller in terms of settling time and overshoot reduction when the inertia constant and time delays of the controlled process are increased. As we can see from the evolution of the parameter’s values while adaption works, it is evident that the least squares method enables rapid identification of system parameters. The identified parameters and PI parameters are adaptively adjusted when the system is disturbed, ensuring stable and optimal performance of the system.
According to the simulation results of the disturbance immunity and robustness tests of the system, it can be seen that although the PI-PI algorithm or GPC-PI has certain advantages in certain aspects, the proposed adaptive GPC-PI algorithm have excellent immunity to disturbances and parameter variations while ensuring control accuracy better than 0.01°C. Thanks to the generalized prediction algorithm’s finite-step system prediction and soft tracking, the adaptive algorithm facilitates a gradual approach of the output to the target value. Comparatively, the adaptive algorithm exhibits smaller overshoots, longer regulation times, and superior temperature stability than other methods. From the changes in the identified parameters and the PI controller parameters, it can be observed that when external disturbances or variations occur, the identified parameters exhibit fluctuations. These fluctuations represent the algorithm’s perception and estimation of external uncertainties. Benefiting from the real-time estimation of the system parameters by the least squares method, disturbances and parameter variations can be detected and suppressed in time by modifying the prediction model based on real-time parameter estimation. Furthermore, the water temperature of the sub-control loop is controlled with high accuracy by adaptively adjusting the PI controller parameters through neural network.
The complex modeling process is avoided and the influence of disturbances is effectively suppressed and the system has strong robustness. Considering the limitations of the study by Nie et al. 18 and Qin et al. 11 in terms of the need for accurate modeling and the suppression of unmeasurable disturbances, the proposed adaptive GPC-PI algorithm can play some role in solving these problems. Reducing the impact of these uncertain factors is of paramount significance for improving the overlay accuracy and productivity of the lithography system.
Conclusions
Temperature fluctuation is one of the main factors affecting the performance of lithography machines. Aiming at the problems of large inertia constant, long time delays, and multiple disturbances in lithography equipment, this paper proposes a temperature control method with a cascade structure based on adaptive generalized predictive control and neural network PI control. Benefiting from the application of least squares parameter identification and neural network parameter tuning, the adaptive GPC-PI controller successfully avoids complex system identification. The simulation results show that the steady-state error of the proposed algorithm is maintained within 0.01°C under the action of disturbance input, and it effectively against the influence of environmental disturbances and time-varying parameters. The above results lead us to a conclusion that the proposed adaptive GPC-PI control algorithm is superior to the conventional method in terms of control accuracy, anti-interference ability, and robustness. Future research will focus on optimizing the method of obtaining GPC controller parameters, which is beneficial to improving the performance of the proposed adaptive GPC-PI controller.
Footnotes
Author contributions
Conceptualization, Z.L. and Y.W.; methodology, Z.L.; software, Z.L. and J.C.; validation, Y.Y. and C.X.; formal analysis, Z.L. and B.W.; investigation, Y.Y. and Y.W.; resources, C.X.; data curation, J.C. and B.W; writing—original draft preparation, Z.L.; writing—review and editing, Y.Y. and J.L.; visualization, J.L.; supervision, J.L.; project administration, J.L.; funding acquisition, Y.Y. All authors have read and agreed to the published version of the manuscript.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: The research is funded by Special-Funded Program on Key Scientific Instruments and Equipment Development of Sichuan Province (Grant No.20ZDZX0004); the Frontier Research Fund of Institute of Optics and Electronics, China Academy of Sciences (Grant No. C21K004); Sichuan Regional Innovation Cooperation Project (Grant No.2022YFQ0007); Sichuan Regional Innovation Cooperation Project (Grant No.2023YFQ0108).
Data availability statement
The data presented in this study are available on request from the corresponding author.