
Abstract
To enhance the excavator performance considering the digging force and boom lift force under typical working conditions, this paper aims to solve the complex multiobjective optimization of the excavator by proposing a new knowledge-based method. The digging force at multiple key points is utilized to characterize the excavator’s performance during the working process. Then, a new optimization model is developed to address the imbalanced optimization quality among subobjectives obtained from the ordinary linear weighted model. The new model incorporates the loss degree relative to the optimal solution of each subobjective, aiming to achieve a more balanced optimization. Knowledge engineering is integrated into the optimization process to improve the optimization quality, utilizing a knowledge base incorporating seven different types of knowledge to store and reuse the information related to optimization. Furthermore, a knowledge-based multiobjective algorithm is proposed to perform the knowledge-guided optimization. Experimental results demonstrate that the proposed knowledge-based method outperforms existing methods, resulting in an average increase of 15.1% in subobjective values.
Keywords
Introduction
Hydraulic excavators are essential construction equipment in various fields, including construction, transportation, and water conservancy. Since the digging force and lift force during the working process are critical indicators for evaluating the performance of excavators, and the size of the working device directly impacts these factors, many scholars have researched the optimization for the excavator working devices.1–3 Jong-Won et al. and Xiangjian et al. performed multiobjective optimization by converting multiple optimization objective functions, including bucket digging force, arm digging force, and boom lift force during excavator operation, into a single objective function using the linear weighting method.4,5 This method allocates the weights of each objective based on experience, and the final optimization result is affected by different allocation schemes. Consequently, balancing the optimization quality of each subobjective and achieving the global optimum is challenging. To overcome the limitations of the linear weighting method in multiobjective optimization, the multiobjective algorithm, such as NSGA2 and MOEA/D, has been proposed and applied for multiobjective optimization in real-world engineering problems.6–12 Rongchao et al., Yuqi et al., Qingquan et al. and Xiaojun et al. applied these multiobjective algorithms to vehicle design, aerospace manufacturing, and ship design, which achieved improved results.13–16 Duman et al. proposed the MultiObjective Adaptive Guided Differential Evolution (MOAGDE) to solve the multi-objective-alternating current optimal power flow problem, and the non-dominated sorting strategy was integrated with crowding distance to archive Pareto optimal solutions of multiple conflicting functions. 17 Liu et al. proposed an Adaptive Reference Vector-Guided Evolutionary Algorithm Using Growing Neural Gas (RVEA-iGNG), which integrated the reference vector with Growing Neural Gas network to improve the exploration and exploitation ability of the algorithm for the irregular Pareto front. 18 He et al. proposed a self-organizing map approach for constrained multiobjective optimization problems (CMOSMA), which adopts the strategy of two population evolution to consider the constraints and explore the areas. 19
In summary, multiobjective optimization algorithms typically utilize the non-dominated relationship or the Pareto front to obtain a set of non-dominated solutions and select the final solution. However, as the number of subobjectives in real-world engineering problems increases to more than five subobjectives, it becomes challenging to determine the dominant relationships between different solutions. Moreover, due to the conflict between optimization objectives, the resulting Pareto front may exhibit imbalanced performance across subobjectives, making it suboptimal as a reference point for the optimization process. Additionally, existing algorithms are primarily heuristic, relying on random searches within the feasible region to find optimal solutions. As the dimensionality of subobjectives increases, it becomes increasingly difficult to obtain the optimal solution through a random search, leading to a decline in optimization quality. The existing multiobjective methods often struggle to achieve satisfactory results in excavator optimization due to the multiple objectives and constraints. Therefore, it is essential to propose a new optimization method to enhance the quality of the multiobjective excavator optimization. Since knowledge engineering has been widely applied in various industries, including aircraft design, shipbuilding, transportation, and bridge construction,20–28 integrating the problem-solving process and the experience from previous research to address real-world engineering problems more effectively, the quality of excavator optimization can be improved by summarizing and utilizing existing experiences as guidance in the optimization process based on knowledge.
In conclusion, this paper introduces a knowledge-based multiobjective collaborative optimization method for excavator working devices, integrating knowledge engineering with optimization. To enhance the digging force under typical working conditions during the working process rather than at a single position, the digging force is characterized by multiple key points. Then, a multiobjective collaborative optimization model is developed, incorporating the loss degree of each subobjective to overcome the limitations in existing methods when dealing with the multiobjective optimization of excavators. Furthermore, a knowledge-based multiobjective algorithm is designed, performing the knowledge-guided optimization of the excavator.
Multiobjective optimization model of the excavator working device
Optimization variables
The excavator working device consists of a boom, arm, bucket, and three sets of working hydraulic cylinders. The hinge point positions of the components, component dimensions, hydraulic cylinder stroke and other factors simultaneously determine the subobjective performance of the working device. By analyzing the relationship between each component hinge position of the excavator working device shown in Figure 1 and the performance indexes such as digging force, the hinge position dimensions of the components (

Schematic diagram of working device.
Objective functions
Subobjective function of the digging force
The digging actions of excavators can be primarily categorized into bucket digging and arm digging. During bucket digging, the boom cylinder and arm cylinder are locked, while the digging action is driven by the bucket cylinder. The trajectory of bucket digging forms an arc with the Q point of the working device as the center and the length of the bucket as the radius. Figure 2 shows the theoretical digging force curve for a 5-ton excavator. The theoretical digging force curve of bucket digging is shown in Figure 2(a).
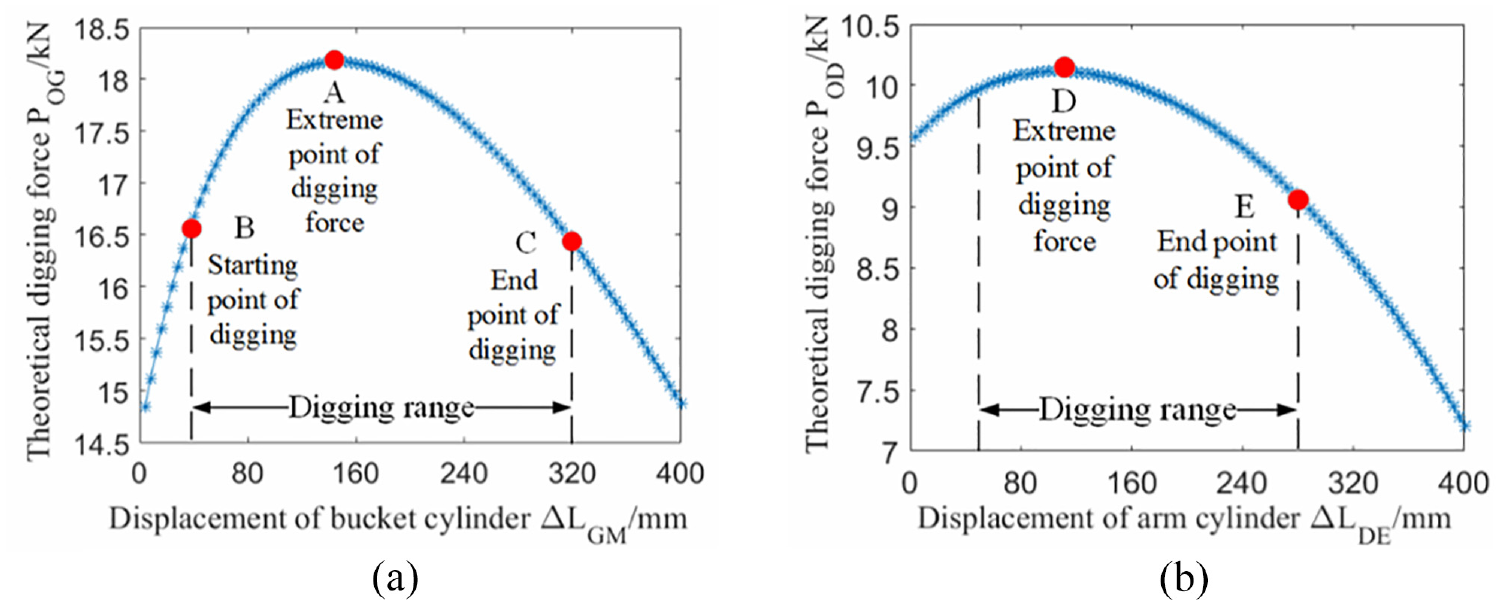
The theoretical digging force curve: (a) bucket digging force curves and (b) arm digging force curves.
The relationship between the digging force

where
One of the objectives in optimizing the digging force is to maximize the digging force of the bucket digging process. However, existing studies often focus solely on optimizing the maximum digging force, neglecting the force performance throughout the working process. To overcome this limitation and optimize the theoretical digging force during the bucket digging process, three key points are selected to characterize the digging force: the maximum digging force at the extreme point and the digging force at the starting and ending points of the process. The starting and ending points of the excavation can be determined based on the design specifications of the excavator, which are at 10% and 80% of the maximum stroke of the bucket cylinder, as shown in points A, B, and C in Figure 2(a). The subobjective functions of bucket digging force are as follows:



During the arm digging process, the bucket cylinder and the boom cylinder are locked while the arm cylinder drives the arm digging action. Similarly, the arm digging trajectory forms an arc with the F point of the working device as the center and the FV length as the radius. The theoretical digging force curve of arm digging is shown in Figure 2(b). The relationship between the digging force

where
Another objective in optimizing the digging force is to maximize the digging force during the arm digging process. Based on the analysis of various force curves, it is observed that the arm digging force quickly reaches its peak shortly after the beginning of digging, with the starting point of arm digging being close to the extreme position. Therefore, in accordance with the design specifications, the theoretical digging forces at two key points are selected to characterize the arm digging process: the maximum arm digging force at the extreme point and the digging force at the ending point. The position of the starting and ending points of the arm digging can be determined based on the design specifications of the excavator, which are at 15% and 70% of the maximum stroke of the arm cylinder. The key points are shown in Figure 2(b) as points D and E. The corresponding subobjective functions are as follows:


Subobjective function of the lift force of the boom
After the excavator completes the excavation process, it proceeds to the lifting stage to transfer the excavated material, where the lifting action is driven by the boom cylinder alone. Figure 3 shows the relationship between the lift force

where

Schematic diagram of boom lift force analysis.
To ensure that the working device has the capacity to lift material and maximize the boom lift force, it is necessary to consider it as one of the subobjective functions. The corresponding function is:

Modeling the multiobjective optimization function based on the subobjective loss degree
The multiobjective optimization problem of excavator working devices studied in this paper involves six optimization subobjective functions. When using the conventional linear weighting method to convert the multiobjective optimization problem into a single-objective optimization problem, it becomes difficult to obtain both the overall optimal solution and satisfactory results for each subobjective. To achieve multiobjective optimization results that encompass not only the overall optimal values of the composite multiobjective functions but also enhance the satisfaction of each subobjective function in a balanced manner, this paper introduces the concept of the subobjective loss degree. The loss degree is used to evaluate the level of satisfaction for each subobjective during the multiobjective optimization. Then, a new multiobjective optimization model is constructed, considering the subobjective loss degree as a fundamental component. The subobjective loss degree is expressed as follows.

where
By utilizing the expression for the subobjective loss degree, it is possible to establish a new objective function for multiobjective collaborative optimization. This objective function aims to balance the reduction of the loss degree for each subobjective while also ensuring the optimization quality of each subobjective through the implementation of loss degree constraints. It is expressed as follows.


where
In this model, the traditional approach of using the Pareto front obtained directly by the multiobjective algorithm is replaced by utilizing the independent optimal solution of each subobjective as the reference point for the optimization process. The optimization quality of each subobjective is evaluated through the loss degree, which prevents the degradation of optimization quality caused by suboptimal reference point selection in existing algorithms, especially in high-dimensional problems. This multiobjective collaborative optimization model effectively evaluates the optimization quality of each subobjective using the loss degree. Subobjectives with higher loss degrees are targeted for optimization through integrating knowledge engineering while ensuring the optimization quality of each subobjective by the loss degree constraint.
Constraint conditions
To ensure that the geometric relationships between various component dimensions of the working device and the loss degree meet the requirements during the optimization process, it is necessary to establish the corresponding constraint functions. These constraint functions are shown in Table 1.
The constraints of the excavator optimization.

The main framework of multiobjective collaborative optimization based on knowledge
To enhance the multiobjective optimization quality, this paper proposes a new approach that integrates a new multiobjective collaborative optimization model with knowledge engineering. Specifically, a knowledge-based multiobjective collaborative optimization method for excavator working devices is developed. In this method, a dynamic configuration of the variable adjustment strategy is performed during the optimization by considering both the subobjective loss degree and the variable adjustment rules. An evolutionary operator based on knowledge is established, guiding the multiobjective optimization by the dynamic distribution of the adjustment probability of each variable based on the adjustment strategy. Furthermore, the knowledge interaction module is constructed to realize the guidance and update of the knowledge during the optimization. Figure 4 shows the framework of the knowledge-based optimization system, encompassing the optimization preprocessing module, optimization modeling module, knowledge interaction module, collaborative optimization module, and the collaborative optimization knowledge base. The construction and working process of this system is as follows:
Step 1: The case knowledge is obtained by collecting and summarizing samples, drawings, and manuals of excavators. This knowledge is stored in the case knowledge submodule within the knowledge base.
Step 2: The optimization preprocessing is conducted based on the design requirements within the knowledge interaction module and the optimization preprocessing module, as depicted in Figure 4. The variables interval is automatically configured based on the case knowledge and stored in the normative knowledge submodule. Variable sensitivity analysis is performed, and the results are stored in the sensitivity knowledge submodule. The automatic configuration of variables adjustment knowledge is accomplished based on the sensitivity knowledge and stored in the normative knowledge submodule. Each subobjective is optimized independently, and the optimal results are stored in the domain knowledge submodule. The initial excellent individuals are extracted from the independent optimization and stored in the situation knowledge submodule.
Step 3: The objective function for the multiobjective optimization of the excavator working device is formulated using equation (11) in the optimization modeling module. This objective function incorporates the independent optimal solution for each subobjective from the domain knowledge.
Step 4: The knowledge-based multiobjective evolutionary algorithm is employed for the multiobjective optimization of the excavator working device within the collaborative optimization module and the knowledge interaction module. The range of variable adjustment is automatically configured by normative knowledge. The subobjective loss degree of individuals in the population is calculated based on the domain knowledge and stored in the objective knowledge submodule. To balance and enhance the optimization quality of subobjectives, a dynamic configuration of the variable adjustment strategy is performed, considering the loss degree and variables adjustment knowledge. A knowledge-based evolutionary operator is constructed guided by the variable adjustment strategy, and templates from the situation knowledge are extracted to conduct knowledge-based evolution operations on the population. The dual evolution of knowledge and population is completed as the related knowledge is updated in response to the evolving population.
Step 5: If the optimized results meet the design requirements, they are output and stored in the knowledge base for further extension and updating of case knowledge. Otherwise, the process returns to Step 3 to re-optimize.

Multi-objective collaborative optimization framework based on knowledge.
Building the knowledge system for multiobjective collaborative optimization
To perform knowledge-based multiobjective optimization of excavator working devices, the knowledge contained in the original data, including formulas, drawings, and standards, is essential to extract and summarize. Once the knowledge has been configured, expressed, and stored in the knowledge base, it can be utilized to guide the optimization process. The knowledge base for excavator optimization in this paper comprises seven types of knowledge stored in submodules, namely objective knowledge, sensitivity knowledge, case knowledge, situation knowledge, normative knowledge, domain knowledge, and history knowledge. To ensure the processing speed of knowledge, the matrix model is employed in this paper to express and store knowledge due to its quick recognition and computation capabilities in computer systems. 29 Figure 5 shows the relationship between knowledge and optimization of the excavator working device as a knowledge graph. Figure 6 shows the structure of the multiobjective optimization knowledge base, which is constructed based on the knowledge graph.

Knowledge graph of multi-objective collaborative optimization knowledge.

Knowledge base structure of multi-objective collaborative optimization.
The objective knowledge submodule stores the knowledge related to individuals in the population of the multiobjective evolutionary algorithm during the optimization. This knowledge comprises performance indices, subobjective loss degrees, variable adjustment strategies, and evaluation functions, which can be updated as the population evolves and represented by four matrices:
The element
The sensitivity knowledge submodule stores the knowledge related to the influence degree of variables to the objectives, which includes the sensitivity of variables to each subobjective and multiobjective. This knowledge can be automatically configured based on the case knowledge and represented by the sensitivity matrix of variables to subobjectives and the sensitivity matrix of variables to the multiobjective. The element

The case knowledge submodule stores the knowledge related to the existing samples to perform the automatic configuration of the variable interval and the sensitivity analysis. This knowledge can be represented by two matrices: the variable matrix and the performance matrix of samples. Through the collection of existing excavator product prototypes, drawings, product manuals, and other data, the basic parameters and dimensional parameters of each sample are extracted and stored in the sample variables matrix. The performance indexes of each sample are calculated based on the subobjective functions and stored in the sample performance matrix.
The situation knowledge submodule stores the knowledge related to the excellent individuals, which provides the templates for population evolution in the optimization process as an external population. This knowledge can be represented by the variables matrix, the performance index matrix, and the evaluation function matrix of the excellent individual. The elements in each matrix represent the variable values
The normative knowledge submodule stores the knowledge related to the range and the rules of variable adjustment, which can guide individuals in the population to converge toward the optimal region within the feasible domain and accelerates population convergence. This knowledge can be represented by the variable interval matrix, the variable interval matrix of excellent individuals, and the adjustment knowledge matrix of variables to subobjectives. The elements



where
The variables adjustment knowledge in normative knowledge is utilized to configure the variables adjustment knowledge of individuals in objective knowledge based on the loss degree of subobjectives during the optimization. It enables the development of dynamic variable adjustment strategies for different individuals within the population. The optimization process is guided to perform the targeted optimization on the subobjectives with a higher loss degree. Additionally, the variables adjustment knowledge of the individual is updated constantly during this process.
The domain knowledge submodule stores the optimal solutions of each subobjective and the differences between each individual’s subobjective values and the optimal solutions. This knowledge is utilized to calculate the degree of loss for each subobjective and evaluate the maturity of individuals in the population. The domain knowledge is represented by the subobjective optimal matrix and the difference matrix of individual performances.
The history knowledge submodule stores the best individuals and their performances from each generation in the optimization process. Additionally, the case knowledge is updated and expanded by evaluating and categorizing the historical optimal solutions in the history knowledge. This knowledge can be represented by the variable matrix and the performance matrix of historically excellent individuals.
Knowledge-guided algorithm for multiobjective collaborative optimization
The existing optimization algorithm aims to find the optimal solution through a large-scale search in the population and update the individuals. However, this process is influenced by random factors and non-ideal reference points, which affect the final results. To overcome these limitations, a knowledge-based multiobjective optimization algorithm that integrates optimization and knowledge guidance is proposed. The multiobjective optimization model, which includes the subobjective loss degree constructed in this paper, is optimized using the new algorithm. The variable interval is determined based on case knowledge, while the degree of loss is calculated using the reference point stored in domain knowledge. Individuals in the population are classified based on the subobjective loss degree found in objective knowledge. A knowledge-based evolutionary operator integrated the variable adjustment rules in normative knowledge is constructed, and this operator is combined with template individuals in situation knowledge to perform the knowledge-based evolutionary operation. Finally, the knowledge-based evolutionary operation is performed combined with template individuals in situation knowledge. This method not only utilizes knowledge to guide the evolution direction of the population but also employs the population to update the knowledge during the optimization. It enables the dual evolution of knowledge and population, thereby enhancing the quality of the multiobjective optimization process. The algorithm framework is shown as follows:

Knowledge-based population classification
Conventional algorithms typically employ a single evolutionary strategy for all individuals in the population, which fails to achieve targeted optimization for individuals with varying subobjective performance and often yields unsatisfactory results in multiobjective problems. To address this issue, this paper proposes a new method for classifying individuals in the population. This method fully utilizes the loss degree from objective knowledge to classify individuals during the optimization. The population consists of three types of individuals in each generation: excellent individuals, average individuals, and poor individuals. These individuals are classified based on their multiobjective loss degree, with excellent individuals having lower loss degrees, poor individuals having higher loss degrees, and the remaining individuals being average. The differential evolution operation based on knowledge is applied to excellent and average individuals. For poor individuals, a knowledge-based mutation operation is performed after the differential evolution operation to expand the search range and improve the overall optimization quality of the population.
Differential evolution operator based on knowledge
To address the issue of low convergence accuracy of the binary crossover operator in high-dimensional problems, 30 this paper introduces a knowledge-based differential evolution operator. This operator is constructed upon the differential evolution operator, known for its superior global optimization ability.31,32 By considering the subobjective loss degrees of individuals and utilizing knowledge of loss degree and variable adjustment, the operator conducts targeted differential evolution operations. This approach can guide the population’s evolution, enabling knowledge-based multiobjective optimization of excavator working devices. This operator is constructed as follows.
Step 1: Apply the differential evolution operation for individual
Step 2: Randomly select a parent individual
Step 3: Randomly select another parent individual
Step 4: Configure the variable adjustment strategy for individual


where
Step 5: Perform the differential evolution operation on individual
where

where
Step 6: Perform a boundary check on the new individual. If
The proposed knowledge-based differential evolution operator introduces an adaptive allocation of variable adjustment probability for different individuals based on the subobjective with the highest loss degree. Compared with the ordinary methods, this operator is more targeted and adaptive to individuals with various performances. In addition, the proposed operator utilizes a knowledge-guided approach to allocate adjustment probabilities to each variable, effectively guiding the evolutionary process of the population while still maintaining randomness. This approach helps to prevent the problem of overly constraining the population’s evolutionary direction, which can result in a limited optimization search due to a narrow search domain.
Knowledge-based mutation operator
After the differential evolution operation for all individuals in the population, a mutation operation is performed for poor individuals. This operation is conducted by the knowledge-based mutation operator, which aims to expand the search range and improve the overall quality of the population. This operator is constructed as follows:
Step 1: For a poor individual

where
Step 2: The mutation operation is performed according to the following rules to generate the mutated individual

where
Step 3: Perform a boundary check on
Updating strategies for individuals and knowledge
The proposed knowledge-based multiobjective optimization algorithm incorporates a neighborhood update strategy for population updates.
8
Let
Step 1: Calculate the individual evaluation function, which is the objective function
Step 2: If
Step 3: Compare individual
Step 4: After updating the population, the excellent individuals in the current population compete with the template individuals in situation knowledge to update the external population. If an excellent individual has a lower multiobjective loss degree than the current template, it will replace the template. Based on the new external population, the individual variables, subobjectives, and evaluation functions of the templates in situation knowledge are updated. Furthermore, the variables interval of the excellent individuals in the normative knowledge and the historical excellent individuals in the history knowledge are updated synchronously. Additionally, after generating a new population, the optimal values of each subobjective in the current population can be extracted and utilized to update the subobjective optimal solution in the domain knowledge. This approach ensures the accuracy of the subobjective loss degree and fitness function when evaluating the individuals.
Optimization results and discussion
To confirm the effectiveness of the proposed optimization model for multiobjective collaboration based on subobjective loss degree and the multiobjective evolutionary algorithm based on knowledge, a knowledge-based multiobjective collaborative optimization for the design of the working device of a backhoe excavator is conducted. The initial parameters of the excavator are shown in Table 2.
The initial parameters of the excavator optimization.

During the optimization preprocessing, the excavator samples from case knowledge are extracted based on the design requirements for sensitivity analysis. The variables interval and adjustment knowledge, stored in normative knowledge, are automatically configured to guide the multiobjective optimization process. Each subobjective is optimized independently to obtain the reference point of the working device optimization, which is used to calculate the loss degree of each subobjective. The independent optimization utilizes the ordinary genetic algorithm with a population size of 200. The maximum number of evolution generations is set to 1000, with a crossover probability of 90% and a mutation probability of 1%. The results of independent optimization are shown in Table 3.
The independent optimization results of subobjectives.

During the optimization process, the subobjective loss degree and the new multiobjective optimization model established by equation (11) are employed to calculate the subobjective loss degree and the objective function. The loss degree constraints for each subobjective are determined based on the design requirements and specifications. The knowledge-based multiobjective evolutionary algorithm proposed in this paper is employed to perform the optimization. The algorithm utilizes a population size of 100 and a maximum of 1000 evolution generations. The basic difference probability for the variables is set at 50%, while the basic mutation probability is 1%. The algorithm is executed 30 times, with a neighborhood consisting of 20 individuals. The optimized results and loss degrees for each subobjective are presented in Table 4.
The optimization results and loss degree.

To confirm the superiority of the new method for characterizing the digging force of the excavator working process, as described in Section “Subobjective function of the digging force,” the optimization is performed separately using the different methods to determine the objectives. Specifically, Method A utilizes new force characteristics of the working process. Method B considers the digging force performance of a single extreme position, and Method C focuses on the average digging force performance of the working process as the objective. All methods utilize the proposed algorithm with the same parameters. Figure 7 shows the optimized digging force curve. The black curve represents the optimized result with the digging force at multiple key points as the objective. The red curve represents the optimized result with the maximum digging force at a single extreme position as the objective, and the blue curve represents the optimized result with the average digging force of the work process as the objective.

Comparison of digging force curves: (a) bucket digging and (b) arm digging.
As shown in Figure 7, the maximum digging force for typical working conditions is nearly the same for all methods, and Method B is a little higher than others. However, there are differences in the performance of the digging force in the work process by different methods. In the initial stage of bucket digging, Method A exhibits the highest digging force, surpassing Method B and Method C by 11.2% and 8% respectively. However, toward the end of the bucket digging process, Method A’s digging force is 14.7% higher than that of Method B but slightly lower than that of Method C by approximately 2.9%. In terms of the average digging force performance during bucket digging, Method A surpasses Method B by 13.8%, but is slightly lower than Method C by approximately 1%. At the end of arm digging, the digging force of Method A exceeds that of Method B by 9.1% but falls slightly below that of Method C by about 1.3%. When comparing the average digging force performance of arm digging, Method A is 6.2% higher than Method B, yet slightly lower than Method C by about 0.6%. The optimization results reveal that, in comparison with optimization based on the maximum digging force as the objective, the proposed method enhances the digging force performance of the working process while maintaining the maximum force at a similar level. Additionally, in contrast to optimization based on the average digging force as the objective, the proposed method ensures the digging force performance at key points while maintaining the average digging force at a near-identical level.
To confirm the superiority of the new multiobjective optimization model established in Section “Modeling the multiobjective optimization function based on the subobjective loss degree,” the new model and the ordinary linear weighted (LW) model are employed to optimize the excavator working device using the same algorithm. Furthermore, to compare the results of various weight allocation schemes in the ordinary linear weighting method, four weight allocation schemes are utilized for optimization, as shown in Table 5. Table 6 and Figure 8 shows the optimized results and the degree of loss for subobjectives obtained from the new model and the ordinary linear weighted model. In Figure 8, the abscissa represents the subobjective number, and the ordinate represents the loss degree value.
The weight allocation scheme of the ordinary linear weighted model.

Comparison of optimized results between the new model and the linear weighted model.


Comparison of loss degrees from different optimization models.
As shown in Table 6 and Figure 8, the linear weighting models with different weight allocation schemes display significant variations in the optimized results and loss degrees of each subobjective. The findings demonstrate that weight allocation significantly influences the optimized results in the ordinary linear weighting model. For each weight allocation scheme, the average loss degrees for the subobjectives are 5.95%, 13.05%, 9.77%, and 11.55%; the maximum loss degrees are 13.44%, 40.75%, 21.88%, and 32.43%; the variances of the loss degree are 20.1, 204.22, 46.22, and 112.22. For the new optimization model, the average subobjective loss degree of the optimized result is reduced to 2.81%, with a maximum subobjective loss degree of 8.7%. The loss degrees of other subobjective are no more than 5%, resulting in a variance of 10.3 for the subobjective loss degree. Compared to the linear weighting model with four different weight allocation schemes, the average subobjective loss degree of the new optimization model is significantly lower. Specifically, it is 3.14%, 10.24%, 6.96%, and 8.74% lower for the respective schemes. The optimization results demonstrate that, despite the new optimization model’s subobjectives displaying both strengths and weaknesses when compared to the linear weighting method, the average and maximum loss degrees of each subobjective are lower than those of the linear weighting method. Additionally, the variance of the loss degree is decreased, resulting in a more balanced optimization quality, achieving improved balance in the digging force during operation and the boom lift force at the extreme position.
To confirm the superiority of the proposed knowledge-based multiobjective optimization algorithm discussed in Section “Knowledge-guided algorithm for multiobjective collaborative optimization” for addressing the multiobjective optimization problem of the excavator working device, a comparison is conducted with prominent multiobjective optimization algorithms. The Reference Point Dominance-based NSGA-II (RPDNSGA2), 33 MOEA/D with Covariance Matrix Adaptation evolution strategy (MOEA/D-CMA), 34 Competitive mechanism based Multi-Objective Particle Swarm Optimizer (CMOPSO), 35 RVEA-iGNG, 18 and CMOSMA 19 are employed in the excavator multiobjective optimization. The parameters for each algorithm, including population size and maximum evolution generation, are set to be the same. To obtain the optimal result, each algorithm is executed 50 times. The independent optimal solution of each subobjective obtained in the optimization preprocessing is utilized as the optimization reference point in the new algorithm. In contrast, the extreme value for each subobjective obtained during the optimization is utilized as the optimization reference point in the existing algorithms. Figure 9 shows the reference points obtained by each algorithm. Due to the better performance of each subobjective, including the higher digging and lift force, the reference point obtained through the independent optimization of the subobjectives is superior to those obtained automatically within the existing algorithms.

Comparison of reference points.
Table 7 presents the subobjective values of the optimized results obtained from different algorithms. Figure 10 shows the comparison of the loss degree for each subobjective. The new algorithm demonstrates an average loss degree of 2.8%, a maximum subobjective loss degree of 8.7%, and a variance of loss degree of 9.71. In contrast, RPDNSGA2, MOEAD-CMA, CMOPSO, RVEA-iGNG, and CMOSMA exhibit average loss degrees of 9.72%, 16.82%, 16.58%, 12.9%, and 20.64%. The maximum subobjective loss degrees for these algorithms are 27.35%, 32.6%, 45%, 33.3%, and 29.7%, while the variances of subobjective loss degrees are 90.79, 131.65, 234.86, 126, and 261.14, respectively. The new algorithm improves the optimized results by an average of 6.9%, 14.1%, 13.78%, 10.16%, and 10.84% compared to the existing algorithms. The results demonstrate that the new algorithm outperforms the existing algorithm in average loss degree, maximum loss degree, and variance of loss degree. The performance of each subobjective is improved, and the optimization quality is more balanced. The population evolution curves for different algorithms are illustrated in Figure 11. The horizontal axis represents the number of population evolutions, while the vertical axis displays the average loss degree of the population. As depicted in the figure, during the evolution process, all algorithms exhibit rapid evolution initially, followed by a tendency to stabilize. They all converge after approximately 100 generations. However, the proposed algorithm in this paper demonstrates a lower average population loss degree compared to other algorithms. In summary, the new algorithm proposed in this paper accomplishes a balanced improvement in optimization quality while ensuring efficiency in the optimization process.
Comparison of the optimized results from different algorithms.

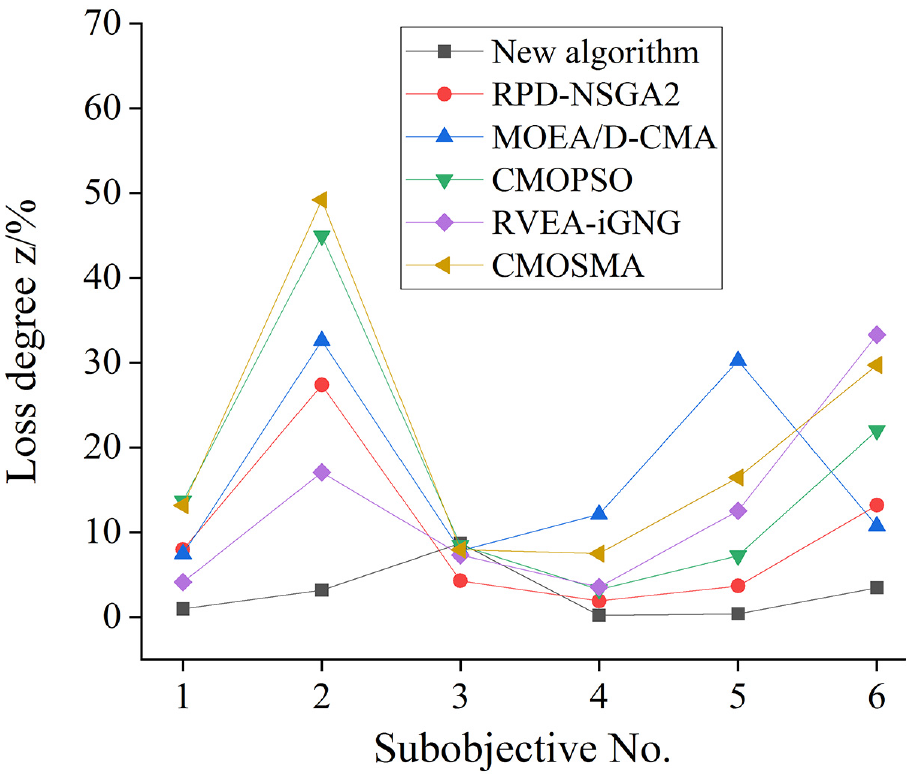
Comparison of loss degrees.

Comparison of population evolution curves.
Furthermore, the algorithm is evaluated by calculating the Hypervolume (HV) of the solution set, using the independent optimal solution of each subobjective as the reference point. A higher HV value indicates the algorithm’s effectiveness in solving multiobjective problems. The evaluation results are presented in Table 8, demonstrating that the new algorithm exhibits superior solving capabilities in addressing the multiobjective optimization of excavators. By integrating case knowledge, normative knowledge, objective knowledge, and other relevant knowledge into the optimization process and constructing the knowledge-based evolutionary operator, the optimization quality for each subobjective and the convergence ability of the population are significantly improved.
Comparison of the HV values of different algorithms.

In summary, a knowledge-based multiobjective optimization method is proposed for excavator optimization. The subobjective of enhancing the digging force during the working process is achieved by utilizing the digging force at multiple key points to characterize the excavator’s performance. The proposed multiobjective optimization model and knowledge-based algorithm effectively improve the optimization quality of excavator working devices, with a more balanced performance across each subobjective.
Conclusion
(1) The digging force at multiple key points along the bucket teeth trajectory under the typical working condition is utilized to characterize the digging force characteristics throughout the working process. The subobjective function of the digging force is established based on this characterization method in multiobjective excavator optimization. This approach addresses the limitation of optimizing the digging force based on a single extreme position. The optimized results demonstrate a significant improvement in digging force, with a 10.3% and 5.4% increase compared to the original method under two typical working conditions, respectively. The new modeling method for the digging force significantly enhances its performance throughout the working process.
(2) The multiobjective collaborative optimization model, based on the subobjective loss degree, proposed in this paper addresses the limitation of the original linear weighted method in guaranteeing the optimization quality of each subobjective. This new model achieves a more balanced improvement in the optimization quality of each subobjective. To evaluate its effectiveness, the new optimization model is applied to optimize the working device of the excavator and compared with the ordinary linear weighting model using four different weight allocation schemes. The results show that the multiobjective loss degree, maximum subobjective loss degree, and variance of loss degree of the optimized results obtained from the new model are lower than those obtained from the linear weighting model, indicating that the new model outperforms the ordinary linear weighting model in the result of subobjectives.
(3) The knowledge-based multiobjective evolutionary algorithm developed in this paper incorporates multiple types of knowledge to guide the optimization process. During optimization, the algorithm utilizes loss degree knowledge to evaluate the quality of each subobjective and employs variable adjustment knowledge to determine the individual’s variable adjustment strategy. A knowledge-based evolutionary operator is developed and combined with the templates from situation knowledge to facilitate targeted optimization for different individuals and enable knowledge-based evolutionary operations for the entire population. Furthermore, even if one of the subobjectives reaches its optimal state, the new algorithm can dynamically adjust the optimization direction based on the loss degree of other subobjectives. This approach enhances the optimization quality of the remaining subobjectives, preventing the algorithm from getting trapped in a single objective optimal state that may contradict the global optimum. The optimized result achieves the multiobjective optimal state with a balanced enhancement of the optimization quality for each subobjective. The independent optimal solution of each subobjective is used as the reference point of the new algorithm to calculate the loss degree of each subobjective in this paper. This method addresses the issue of unsatisfied reference points obtained by existing algorithms during the optimization process.
(4) The multiobjective optimization model and knowledge-based multiobjective evolutionary algorithm proposed in this paper have been applied to optimize the working device of an excavator. The results demonstrate significant improvements in the digging force throughout the working process and the boom lift force at extreme positions. The subobjective loss degree has been effectively reduced, and the new method achieves an average increase of 10% in subobjective values while exhibiting a lower maximum subobjective loss degree and variance of loss degree. Therefore, the proposed multiobjective optimization model and algorithm have significant advantages in the multiobjective optimization of excavator working devices.
Footnotes
Handling Editor: Chenhui Liang
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This project is supported by Major Science and Technology Projects in Fujian Province (CN) (Grant No.2016HZ01010004).