
Abstract
The nonlinear system control is a classical problem in control engineering. In this paper, rather than try to get accurate nonlinear dynamics, the nonlinear and uncertain dynamics are viewed as a signal. It can be estimated by an extended state observer, and compensated by a control law. Accordingly, the nonlinear uncertain system is linearized. Based on the linearized system and the key point of the U-model control, a controller can be designed to obtain predetermined closed-loop system dynamics. To get a more satisfactory performance, a compensation signal of the total disturbance estimation (CSTDE) is designed. Based on the CSTDE, a compensation of the total disturbance estimation based extended state observer (CTDESO) and a fast-response active disturbance rejection control (FRADRC) are proposed. Convergence of the CTDESO and the closed-loop stability of the FRADRC are analyzed. Four nonlinear systems are considered to testify the proposed approaches. Numerical results show that, no matter disturbances exist or not, the proposed CTDESO can linearize a nonlinear system better, and the predetermined closed-loop responses can also be achieved more satisfactorily by the FRADRC.
Keywords
Introduction
For the nonlinear system control, classical approaches, such as the exact feedback linearization approach, the differential geometry approach, and the control Lyapunov approach, depend largely on the system model. However, external disturbances and internal uncertainties are ubiquitous. How to effectively deal with those nonlinearities and the uncertainties is always a fundamental and crucial work in nonlinear system control. 1 Generally, the robust control 2 is introduced to enhance the robustness of the closed-loop system. Nevertheless, it is somewhat conservative for it sacrificing the nominal performance. 1
To get a desired nonlinear control, kinds of approaches have been proposed. For instance, an extended PID control has been proposed to semi-globally stabilize nonlinear uncertain systems. 3 Error-driven nonlinear feedback technique has been designed to improve a class of uncertain multiple-input-multiple-output nonlinear systems with prescribed tracking performance. 4 Finite-time adaptive fuzzy controller and event-triggering mechanism (ETM) are proposed to control a class of non-strict-feedback uncertain nonlinear systems. 5 A robust adaptive control is introduced for multi-input multi-output nonlinear stochastic Poisson jump diffusion systems. 6 A high-precision formation control of nonlinear multi-agent systems has been discussed in Meng et al. 7
In recent years, another effective way to deal with nonlinearities and uncertainties is based on the disturbance estimation and compensation/attenuation. Various techniques, such as disturbance observer-based control (DOBC), composite hierarchical anti-disturbance control (CHADC), uncertainty and disturbance estimator (UDE), unknown input observer (UIO), and active disturbance rejection control (ADRC), have been proposed. 8 For the ADRC, its key idea is to estimate the internal uncertainties and external disturbances, that is, the total disturbance, via an extended state observer (ESO). Then, the nonlinear system can be linearized to be a pure-integrator chain, and the closed-loop performance can be predetermined. Since the ADRC is practical and effective in engineering, and it has been applied in kinds of fields.9–13
In this paper, the ESO is also utilized to estimate the total disturbance. However, given that the classical ESO is only able to estimate the constant type total disturbance without steady-state error, 14 some improvements should be considered in the design of a classical ESO. In addition, to speed up the system response, minimize the phase delay of the forward path is also helpful. In 2002, a U-model control (UC) 15 is proposed for nonlinear systems. Its key point is to get a dynamical inversion, so that the nonlinear plant can be dynamically transformed to be “1.” Then, the phase delay of the controlled plant is minimized. Based on UC, some new results have been proposed. For example, U-model based fuzzy PID control, 16 U-model based adaptive control, 17 and U-model based predictive control 18 have been proposed and satisfied system responses have been obtained. However, the robustness of the closed-loop systems should be paid more attention.
Therefore, in this paper, an improved ESO is proposed to linearize the controlled nonlinear system to be a pure-integrator chain better. Then, the inversion of any nonlinear system becomes a pure-differentiator chain. It greatly reduces the difficulties in obtaining an inversion of a nonlinear system, and the UC can be realized more conveniently, if the ESO works more effectively. Accordingly, the phase delay of the system response is also minimized. Then, based on the proposed ESO, a fast-response active disturbance rejection control (FRADRC) can be proposed to control the nonlinear uncertain systems. In addition, the robustness of the closed-loop system is enhanced vastly as a result of the proposed ESO. In short, contributions of this work can be summarized as:
(1) Based on a compensation signal of the total disturbance estimation, a compensation of the total disturbance estimation based extended state observer (CTDESO) is proposed. Then, the total disturbance estimation becomes much more accurate.
(2) A fast-response active disturbance rejection control is proposed based on the proposed CTDESO, and a much more satisfactory predetermined closed-loop system performance can be achieved.
(3) Instead of identifying an accurate system model, based on the FRADRC and the CTDESO, a more practical, effective, and common solution to the nonlinear uncertain system control is provided. Simultaneously, other advanced control strategies can also be incorporated seamlessly.
The paper is organized as follows. Problem formulation is described in Section 2. In Section 3, the UC and the ADRC are introduced, the CTDESO and the FRADRC are designed and analyzed. Numerical results are presented in Section 4. Finally, conclusions are drawn in Section 5.
Problem formulation
In this paper, a class of nonlinear system subjected to external disturbances is considered,

where
We aim to develop an effective and easy to be implemented control approach for system (1) to achieve satisfactory tracking performance in presence of nonlinear uncertainties and external disturbances.
The fast-response active disturbance rejection control
In order to get an effective and practical control approach, advantages of the UC and the active disturbance rejection control (ADRC) are integrated. Then, a fast-response active disturbance rejection control (FRADRC) can be proposed and designed for system (1).
The U-model control
Structure of the U-model control is shown in Figure 1. Here,
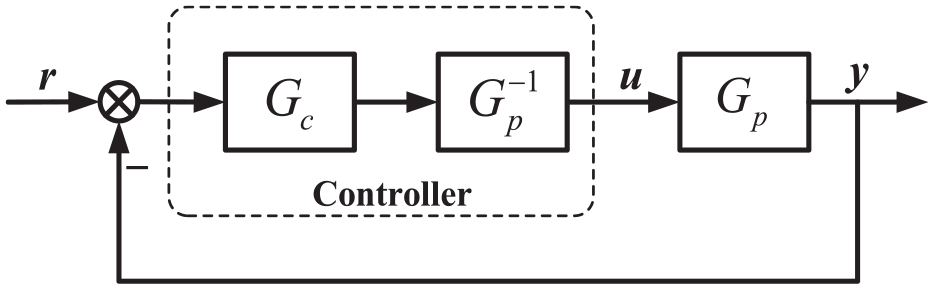
Structure of the U-model control.
Since
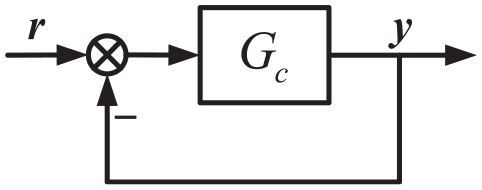
An equivalent structure of Figure 1.
However, it is based on the fact that an inversion of the controlled plant exists and it is available. When the inversion exists, a consequent question is how to get an available inversion. Generally, it is difficult to obtain an inversion for a complex nonlinear uncertain plant. Fortunately, the ADRC provides an effective tool to dynamically linearize a complex nonlinear uncertain system to be a pure-integrator chain. It lays a solid basis for getting an attainable inversion. Therefore, the ADRC is introduced in Section 3.2.
The active disturbance rejection control
To illustrate the ADRC more clearly, a second-order nonlinear system (1) is considered,

where y is the system output, u is the control signal, b is an unknown control gain and
In the viewpoint of the ADRC, all factors that differ from the pure-integrator chain are taken as the total disturbance. By an ESO, the total disturbance can be estimated, and the total disturbance estimation can be utilized in the control law. Then, the controlled nonlinear uncertain system can be dynamically linearized to be a pure-integrator chain. It provides a solid foundation for gaining an inversion of a complex nonlinear uncertain system.
For system (3), considering that the control gain b is unavailable in advance, one can take a proper value b0 first. Then, the difference between b0 and b can be viewed as a part of the total disturbance. That is,

here,
A third-order linear ESO (LESO) can be designed as

where
According to the bandwidth-parameterized approach,
19
one can let

where
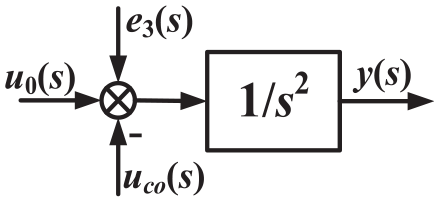
Substituting (6) into system (4), one has

where

Structure of system (7).
Obviously, if the LESO (5) works perfectly, that is, the total disturbance estimation error

In other words, the nonlinear system (3) is linearized to be a pure-integrator chain, and its transfer function is
However, in practice,
A total disturbance estimation compensation signal
To make the LESO be more powerful, a compensation signal of the total disturbance estimation (CSTDE) is necessary to minimize the total disturbance estimation error

After taking Laplace transformation for both sides of system (9), one has Figure 4.
Structure of system (7) with a CSTDE.
From system (9), the CSTDE

However, generally, F is unavailable in practice. Fortunately, on one hand, from system (4), one has

On the other hand, although

Similarly, from (5), one also has

For convenience, the compensation signal

Fast-response active disturbance rejection control design
Based on the compensation signal (14), an improved total disturbance estimation can be defined as
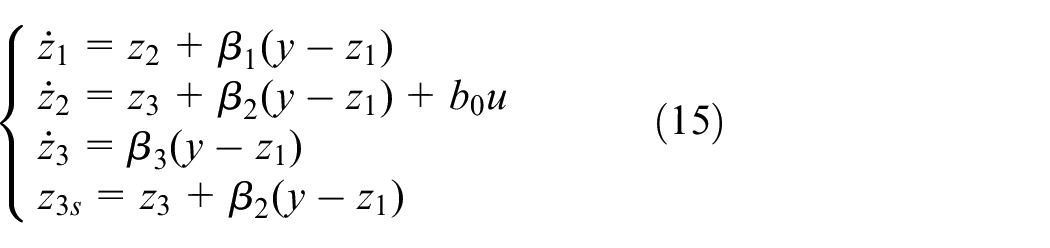
and the control law u can also be updated from (6) to (16)

As to
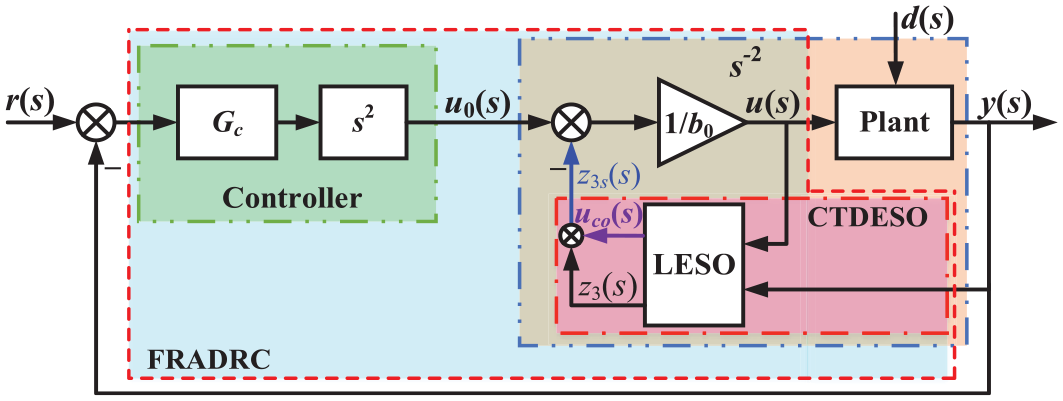
A nonlinear control structure of the FRADRC.
Figure 5 shows that the FRADRC is composed of a controller and a CTDESO. In addition, one can also find that the controller includes two parts. One is
For a second-order system, its standard transfer function is

where
Accordingly, the FRADRC comprises the CTDESO (15), the updated control law (16) and (17).
Convergence of the CTDESO
Let the total disturbance


Let

where
Solving system (20), one has
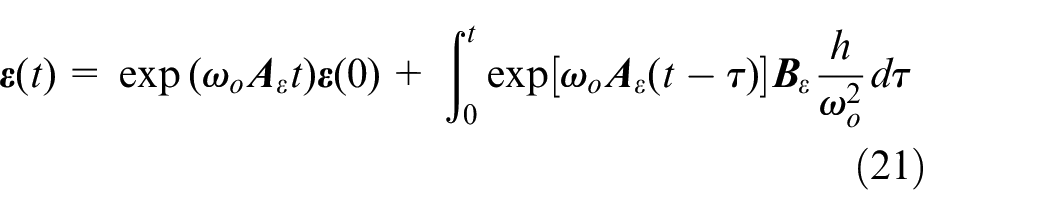
Let
Since

For
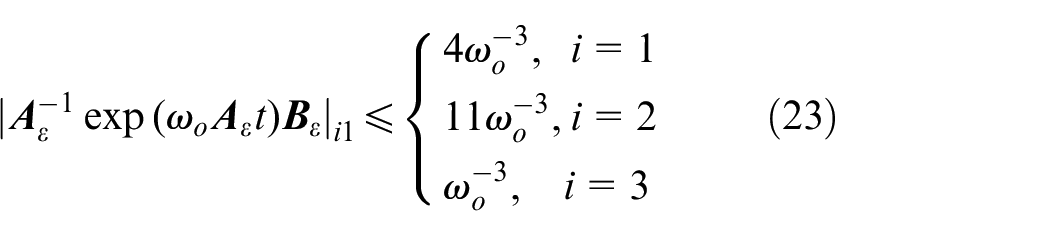
For
Combining (21), (22), and (24), one has
Since
Therefore, the CTDESO is convergent.
To make a comparison, like,
20
one has the total disturbance estimation error of a LESO, that is
Stability of the FRADRC
Based on the convergence of the CTDESO, the FRADRC can be constructed. From Figure 5, one can find that the closed-loop system performance depends on the controller and the CTDESO. As long as the CTDESO works as expected, even if there exists an estimation error, the controlled nonlinear system with external disturbance and internal uncertainties is dynamically transferred to be an approximate pure-integrator chain. Substituting control law (16) into system (4), one has
An equivalent structure of Figure 5.
Apparently, the transfer function of the closed-loop system is
Phase analysis
In this section, the phase advantage of the FRADRC is analyzed. On one hand, from Figure 6, one can find that the closed-loop transfer function is
Therefore, for the same
Besides the system output phase, the phase margin is also calculated. Let open-loop transfer functions, cutting frequencies, and the phase margins of the FRADRC and the LADRC are
Parameter tuning
In this section, adjustable parameters of the FRADRC have been discussed to make a guidance to fix them. Two cases are considered.
Step (1) Since
Step (2) Since the peak time
Step (3) Determine the control gain
Step (4) Getting a suitable
Step (1) Let
Step (2) Supposing that the system response is required to rise to
Step (3)
Simulation results
In this section, four nonlinear plants are considered. Linearization of a nonlinear plant, closed-loop performance with/without external disturbances are presented to highlight the CTDESO and the FRADRC. For all plants, constant, sloping, parabolic, and sinusoidal disturbances are utilized (see Figure 7). They are introduced into the system from the fifth second, and all simulations last 10 s.
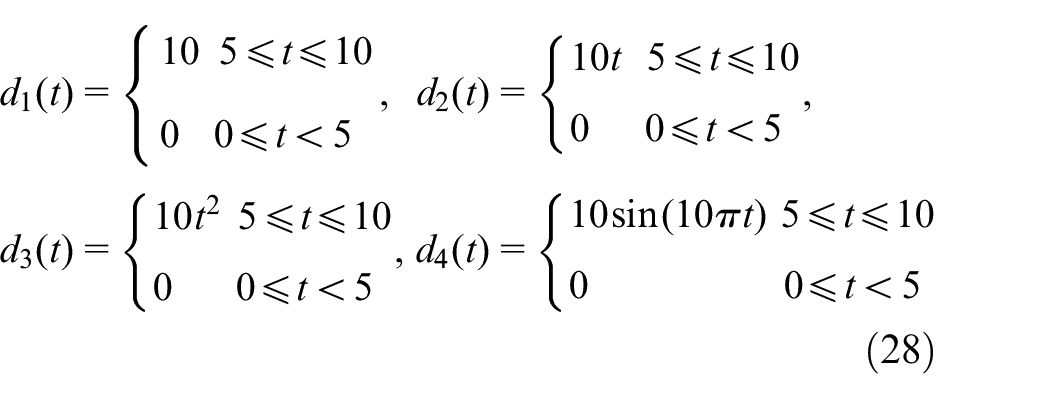
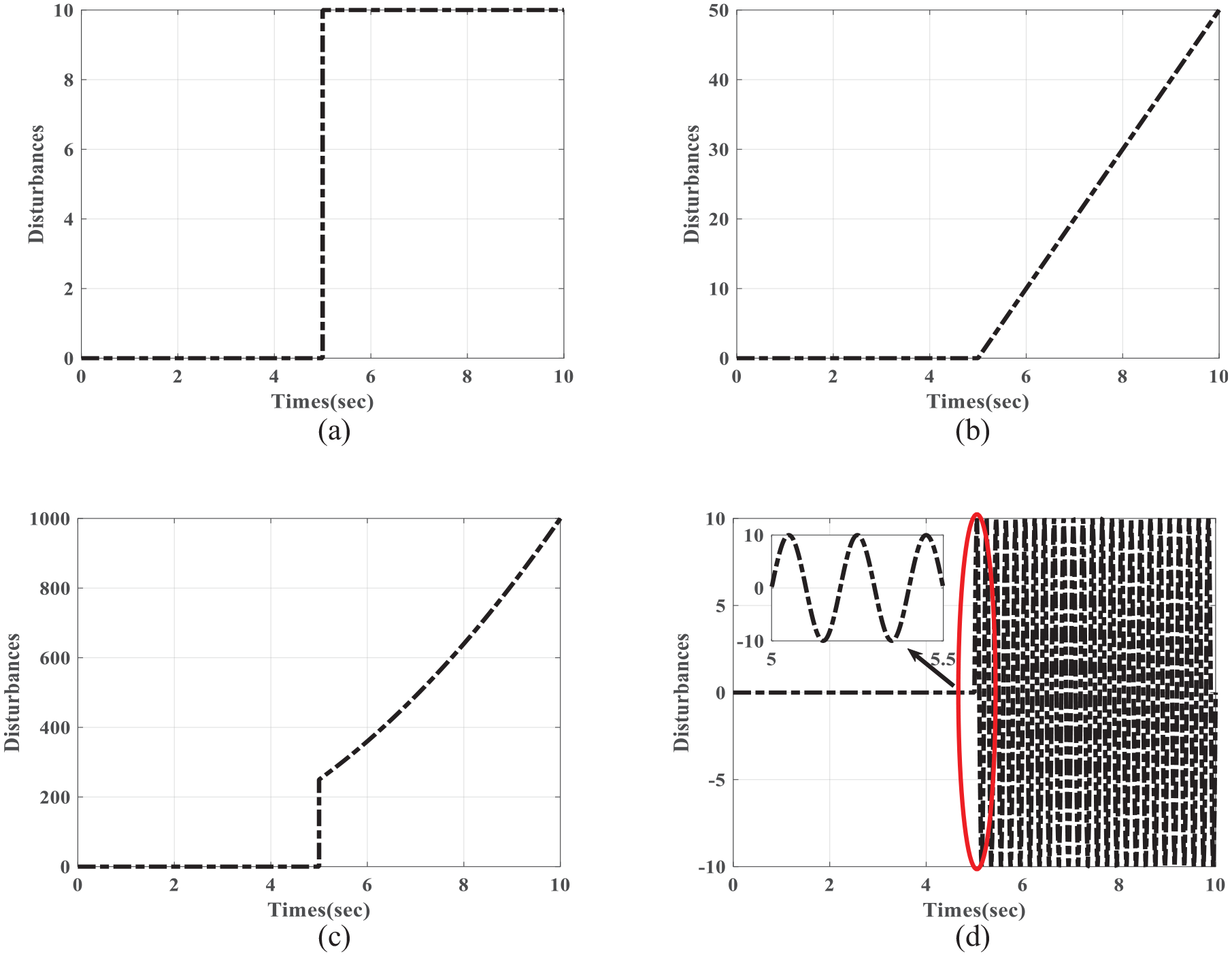
Disturbances utilized in simulations: (a) d1(t), (b) d2(t), (c) d3(t), and (d) d4(t).
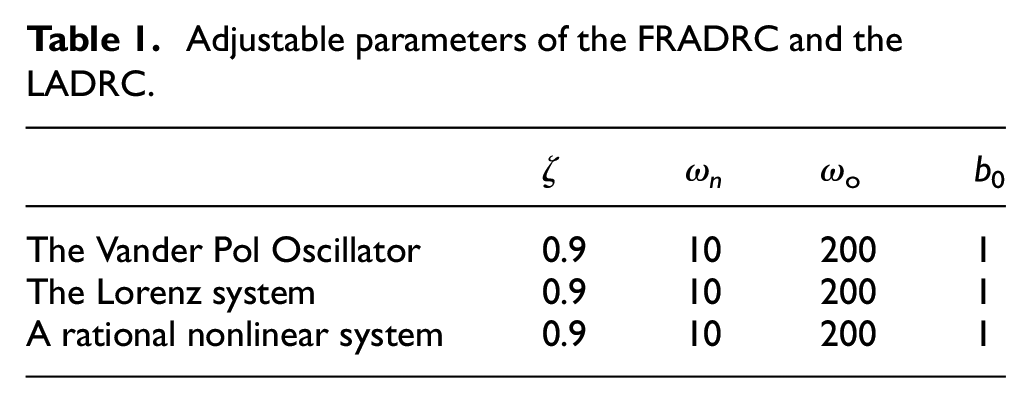
In examples 4.1–4.3, adjustable parameters are listed in Table 1. To make a comparison, the LADRC with
Adjustable parameters of the FRADRC and the LADRC.
Vander Pol Oscillator
Consider a Vander Pol Oscillator (VPO) 21

where
From the design of the FRADRC, one can find that the key point of the FRADRC is to transfer the controlled nonlinear system to be a pure-integrator chain. Here, the dynamical linearization is confirmed first. Then, the ideal and the practical closed-loop responses have been compared.
Figure 8(a) compares the outputs of a linearized VPO and a pure-integrator chain when a step function is input. One can find that, with the help of the CTDESO, the VPO is linearized satisfactorily. Comparatively, without the CSTDE, the LESO is much weaker in linearization. Figure 8(b) depicts the expected step responses and the real-time system outputs. It shows that the desired closed-loop system dynamics described by
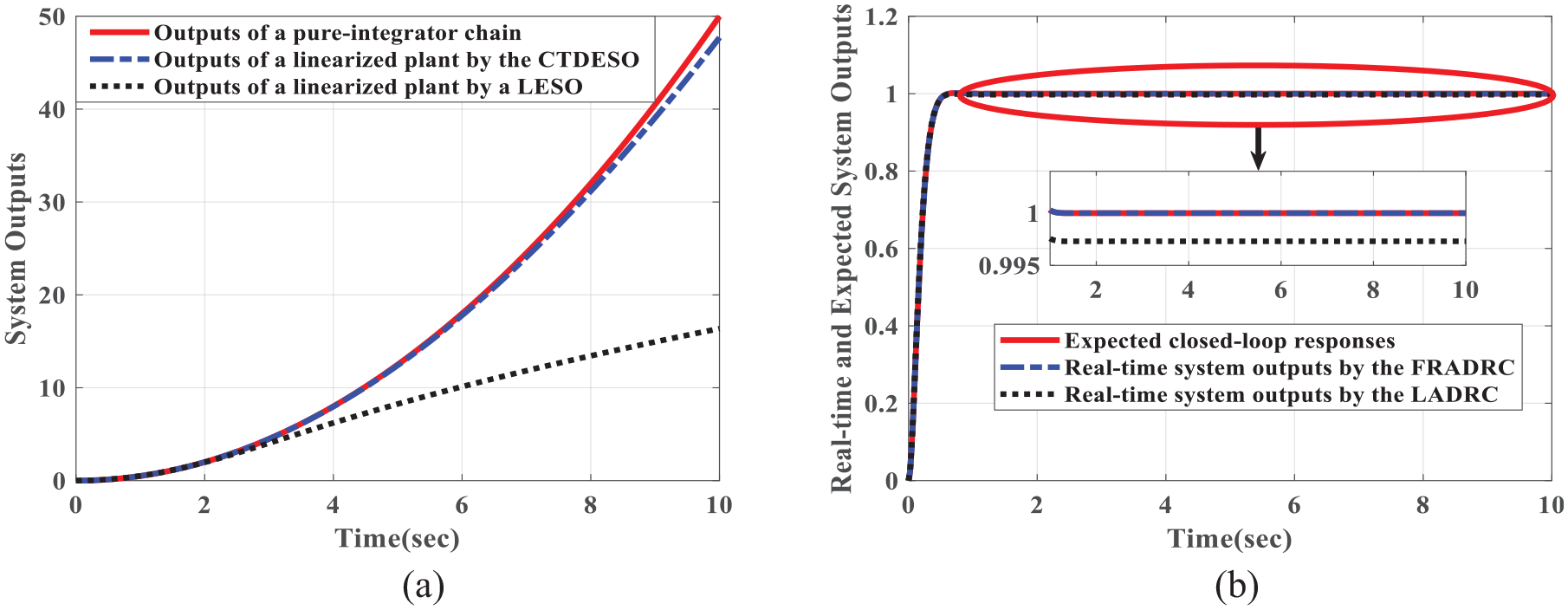
System responses after linearization (I): (a) System outputs of the linearization plants, (b) Step responses.
In this section, step responses in absence of external disturbance are presented and analyzed. To make a comparison, an improved nonlinear proportional-integral-differential controller (NLIOPID) utilized in Shi et al. 21 is also employed. Its control law is 21

Figure 9 compares step responses, tracking errors and control signals of the NLIOPID, the LADRC, and the FRADRC. It can be found that, with similar control signal (Figure 9(c)), the FRADRC is able to obtain a much more stable and more accurate step response (Figure 9(a)). Tracking errors presented in Figure 9(b) also confirm the FRADRC.
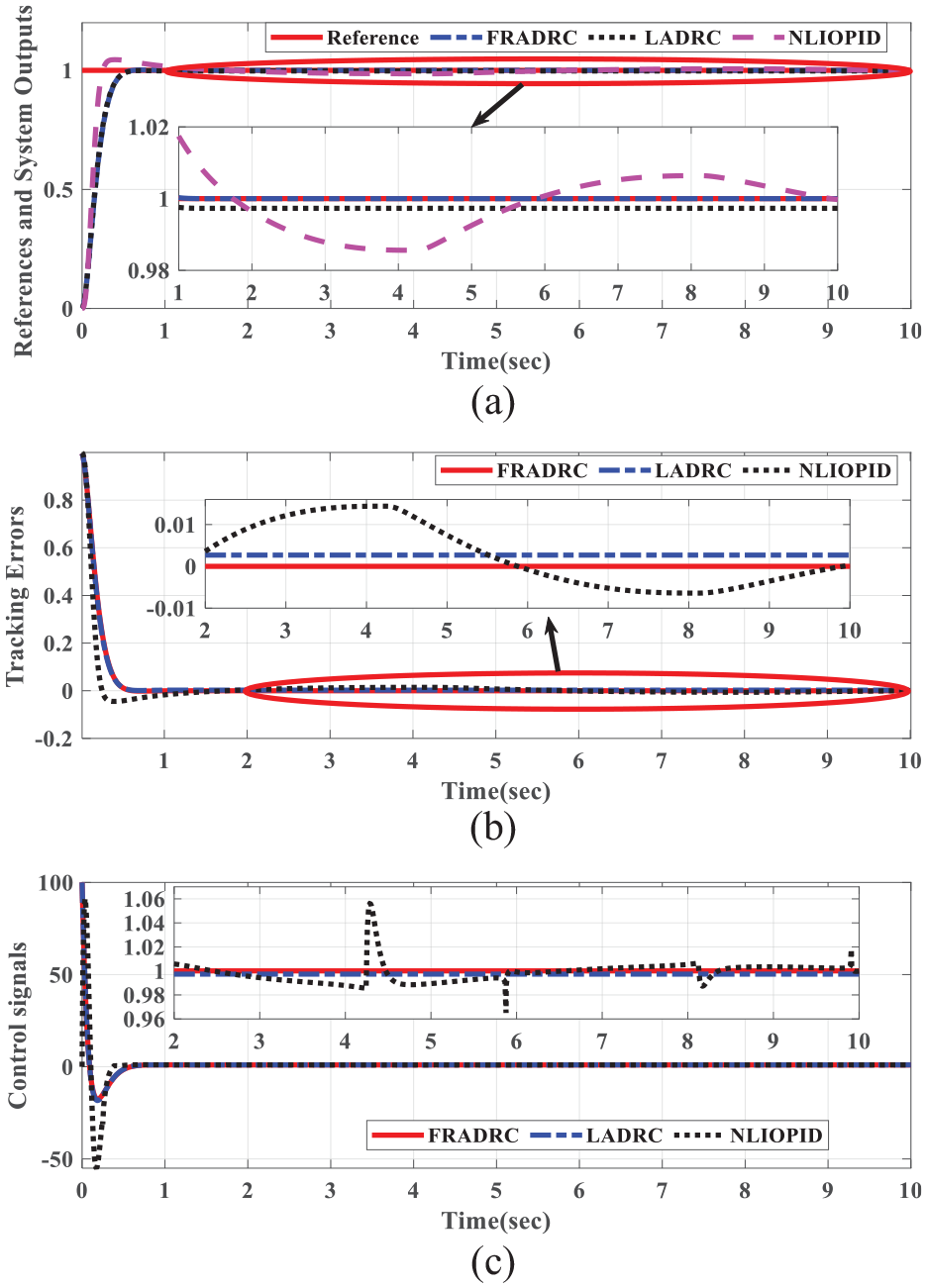
System responses and control signals without external disturbances (I): (a) step responses, (b) tracking errors, and (c) control signals.
To describe the advantage of the FRADRC, integral of time-multiplied absolute-value of error (ITAE) and control energy (E) are calculated and listed in Table 2. The ITAE and E can be obtained by

ITAE and E values of the NLIOPID, LADRC, and the FRADRC for the Vander Pol Oscillator.
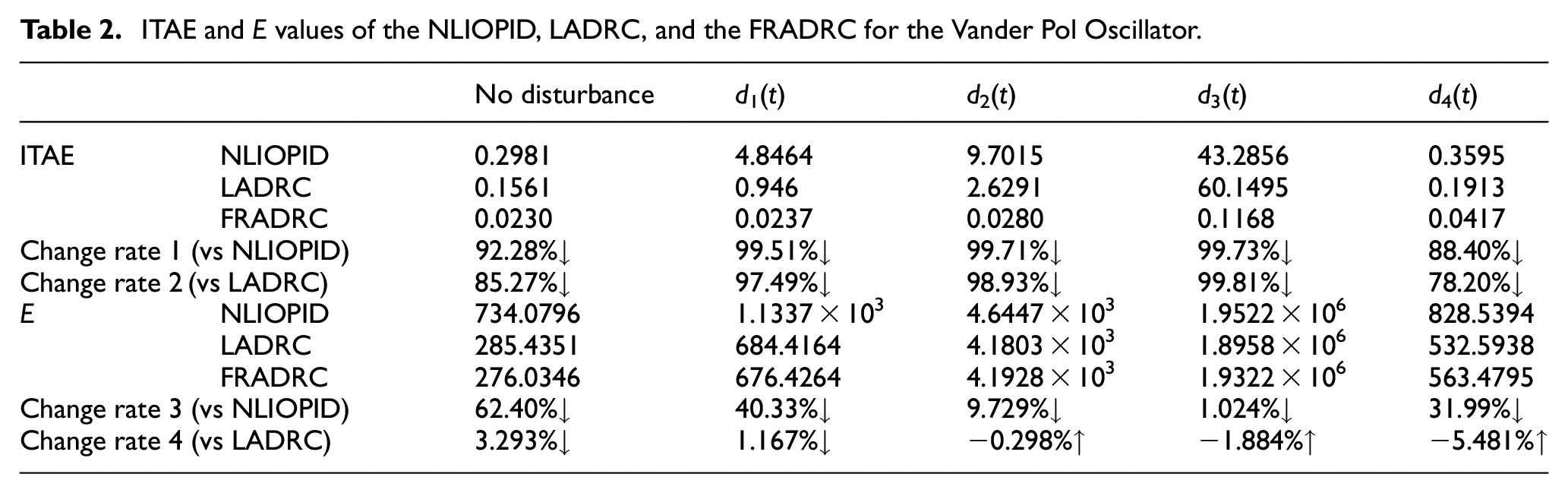
From the data filled in Table 2, it is easy to get a conclusion that the FRADRC behaves much better than the LADRC and the NLIOPID utilized in Shi et al. 21 in absence of external disturbances.
To verify the external disturbance rejection ability, in this section, constant, sloping, parabolic, and sinusoidal disturbances presented in Figure 7 are introduced into the closed-loop system from the fifth second to the end of the simulation. Numerical simulation results are given in Figure 10. ITAE and E values can also be found from Table 2. Both system responses and performance indexes show a fact that the FRADRC can overcome the external disturbances much better than the LADRC and the NLIOPID. It coincides with the analysis that the total disturbance estimation of the CTDESO is much more effective than the one of the LESO. It also highlights the fact that the linearization and the closed-loop performance can be guaranteed by the CTDESO.
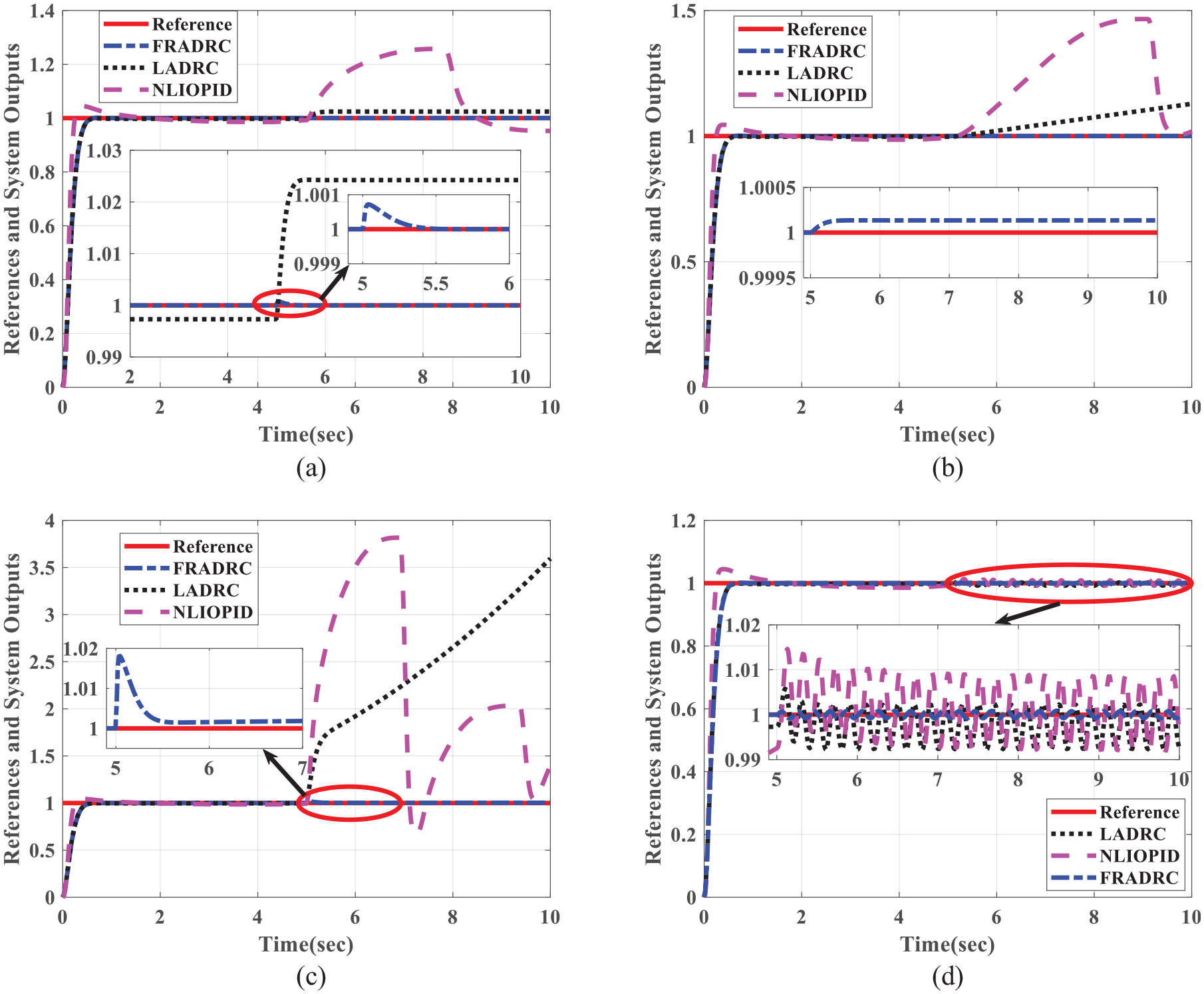
Step responses in presence of external disturbances d1–d4: (a) step responses in presence of d1(t), (b) step responses in presence of d2(t), (c) step responses in presence of d3(t), and (d) step responses in presence of d4(t).
The Lorenz system
The Lorenz system is described by 22

where

In this example, one of the equilibrium solutions is
In this example, controller parameters are still chosen from Table 1. The linearized Lorenz system is given in Figure 11(a). It reveals that, with the same observer bandwidth, the CTDESO is much superior to the LESO as a result of the CSTDE. In this case, compared with the CTDESO based FRADRC, the LESO based LADRC cannot achieve the expected closed-loop performance, and it is confirmed by the real-time system outputs described in Figure 11(b). Although the CTDESO behaves better, its performance limits by its bandwidth. Figure 12 shows another group of step response of the CTDESO and the LESO, when the observer bandwidth
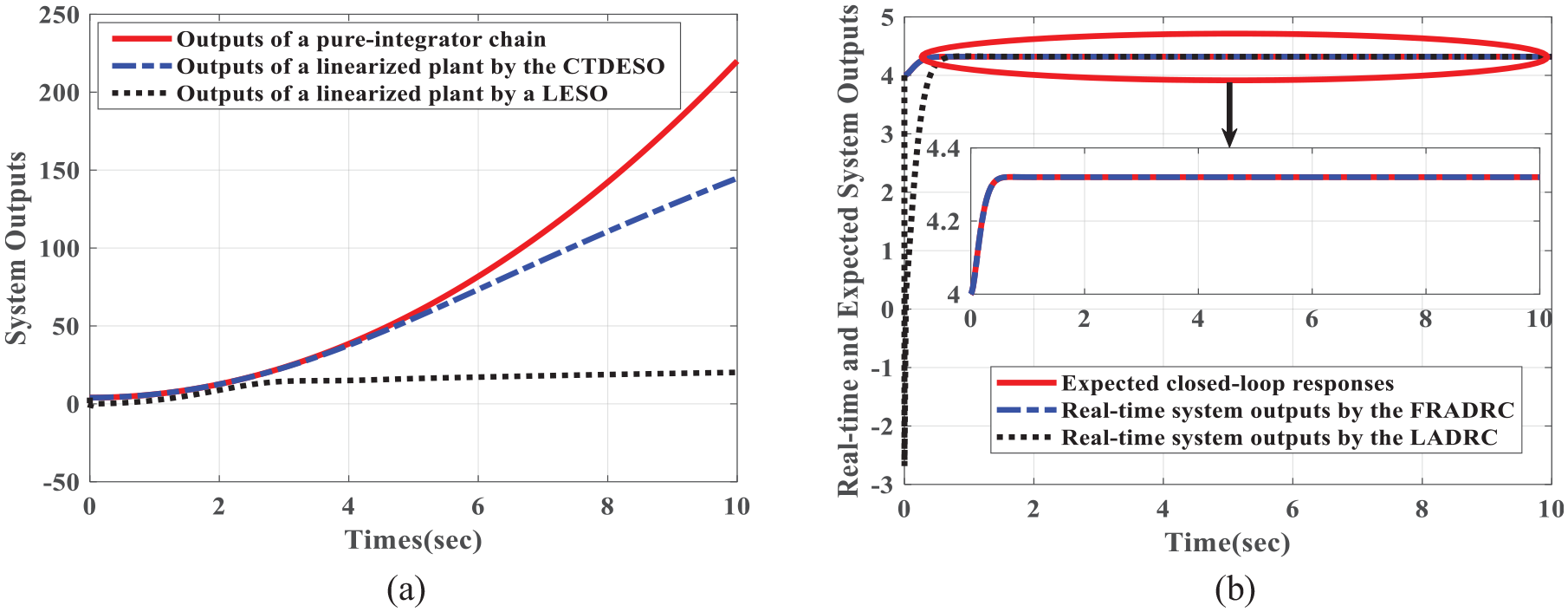
System responses after linearization (II): (a) System outputs of the linearization plants and (b) Step responses.
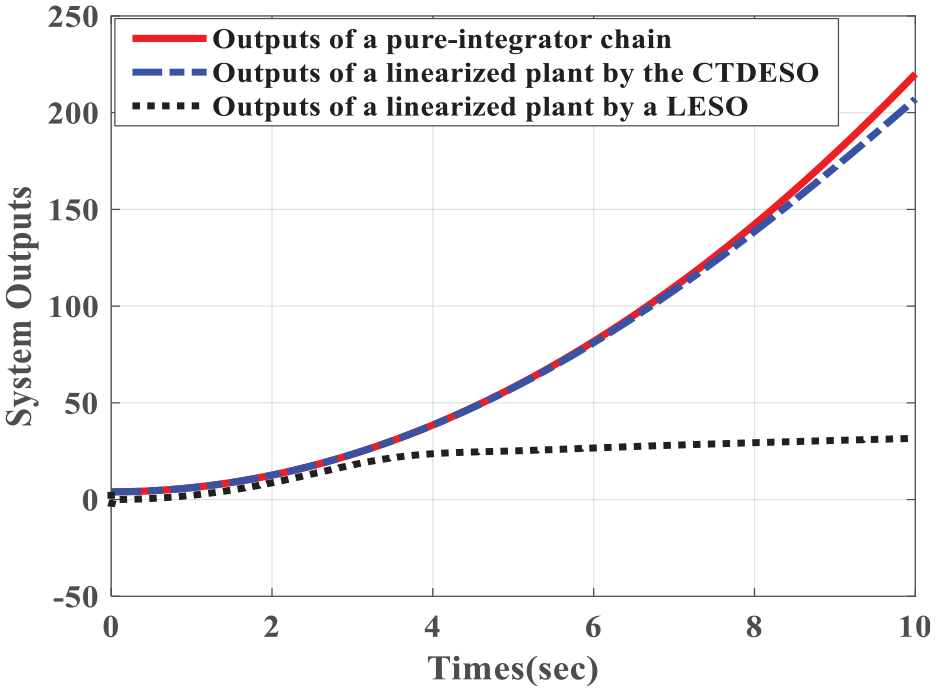
Linearization verification when observer bandwidth is increased.
In this section, step responses without external disturbances are analyzed. State feedback control designed in Yu and Lü 22 is taken to make a comparison, and it is given by 22

According to Yu and Lü,
22
Figure 13 gives out the state responses and control signals of the state feedback control, the LADRC and the FRADRC, respectively. Similar to Figure 11, since the LESO cannot linearize the Lorenz system satisfactorily, the LADRC is not able to get an expected closed-loop performance as the FRADRC. Simultaneously, Figure 13 also presents that the step response of the state feedback control designed in Yu and Lü 22 is not as fast and stable as the one of the FRADRC. Table 3 lists the ITAE and E values with and without external disturbances. Data given in Table 3 still confirm the advantage of the CTDESO and the FRADRC.
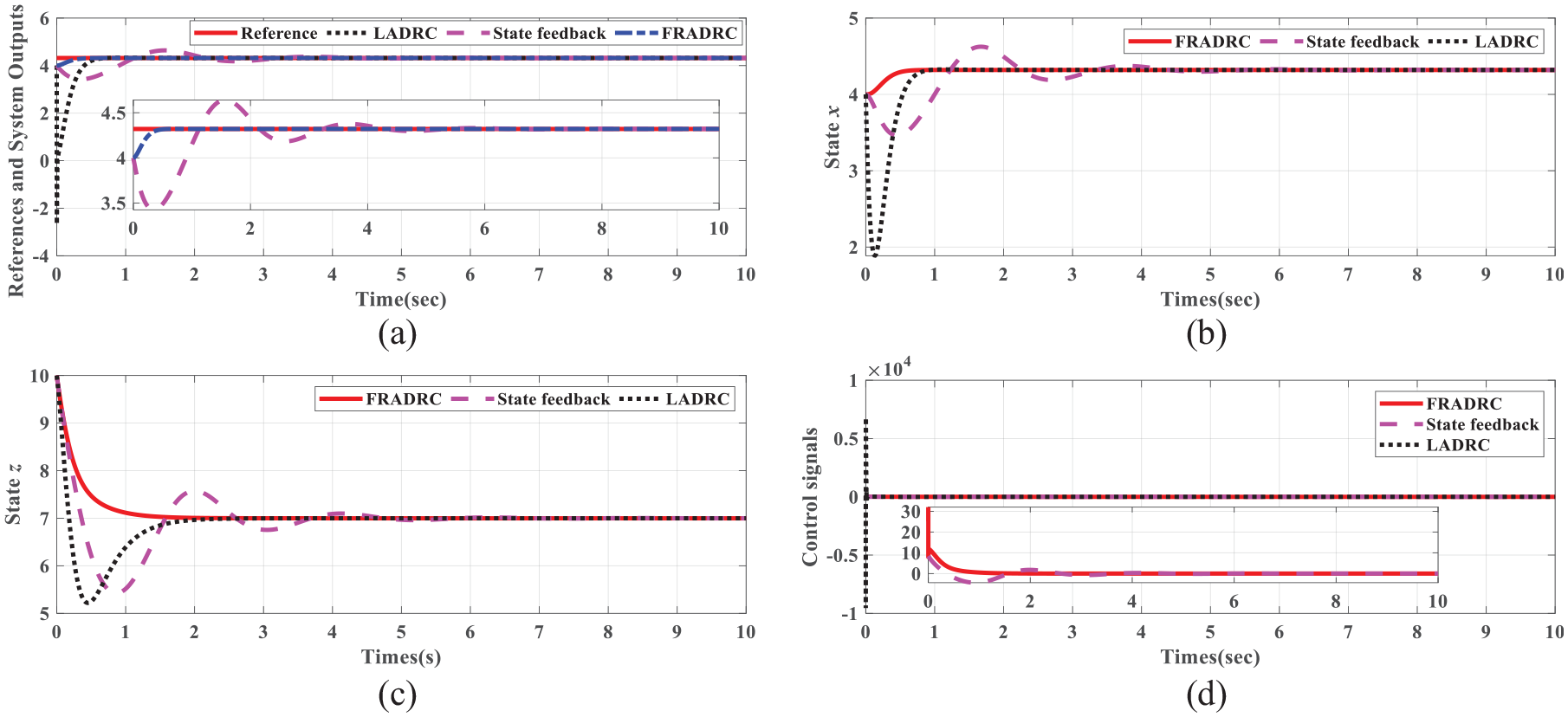
System responses and control signals without external disturbances (II): (a) state y, (b) state x, (c) state z, and (d) control signals.
ITAE and E values of the state feedback, LADRC, and the FRADRC for the Lorenz system.
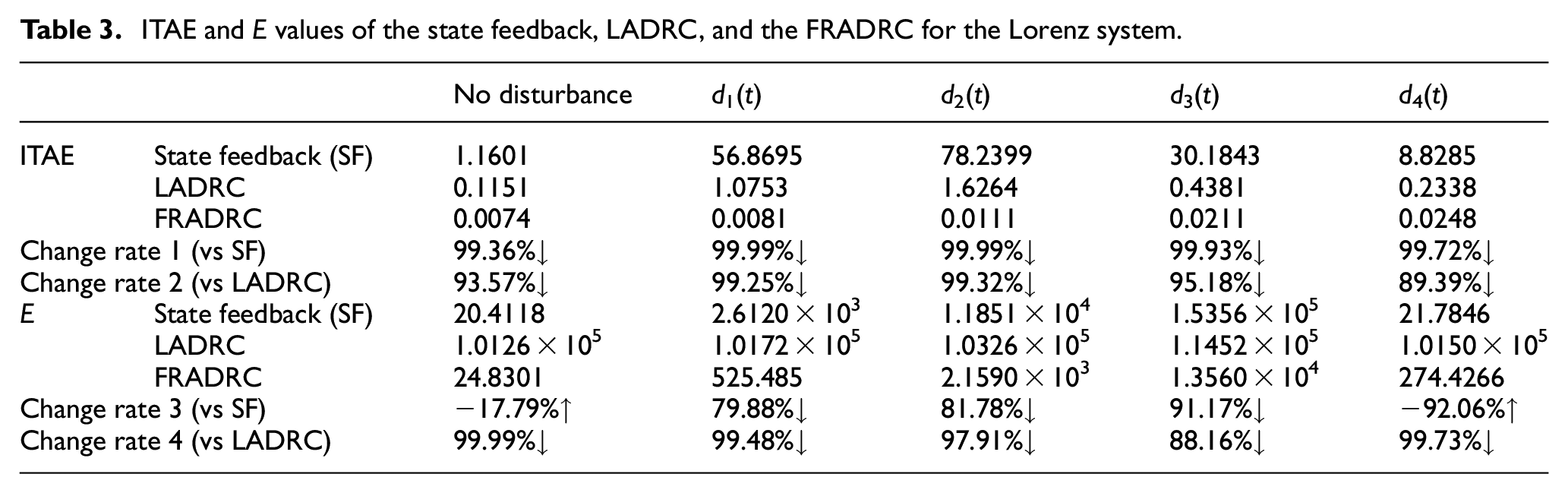
Similarly, the external disturbances listed in (27) have been introduced. Numerical results on the system states have been given in Figure 14. The ITAE and E values listed in Table 3 are in agree with the responses described in Figure 14.
System state y in presence of external disturbances d1–d4: (a) system state y in presence of d1(t), (b) system state y in presence of d2(t), (c) system state y in presence of d3(t), and (d) system state y in presence of d4(t).
A rational nonlinear system
Consider a rational nonlinear system 23

where
Linearization is realized based on the observer bandwidth listed in Table 1. Figure 15 shows that outputs of the linearized rational system by the CTDESO always overlap with the outputs of a pure-integrator chain. It also confirms that the real-time outputs of the FRADRC is much more satisfactory.
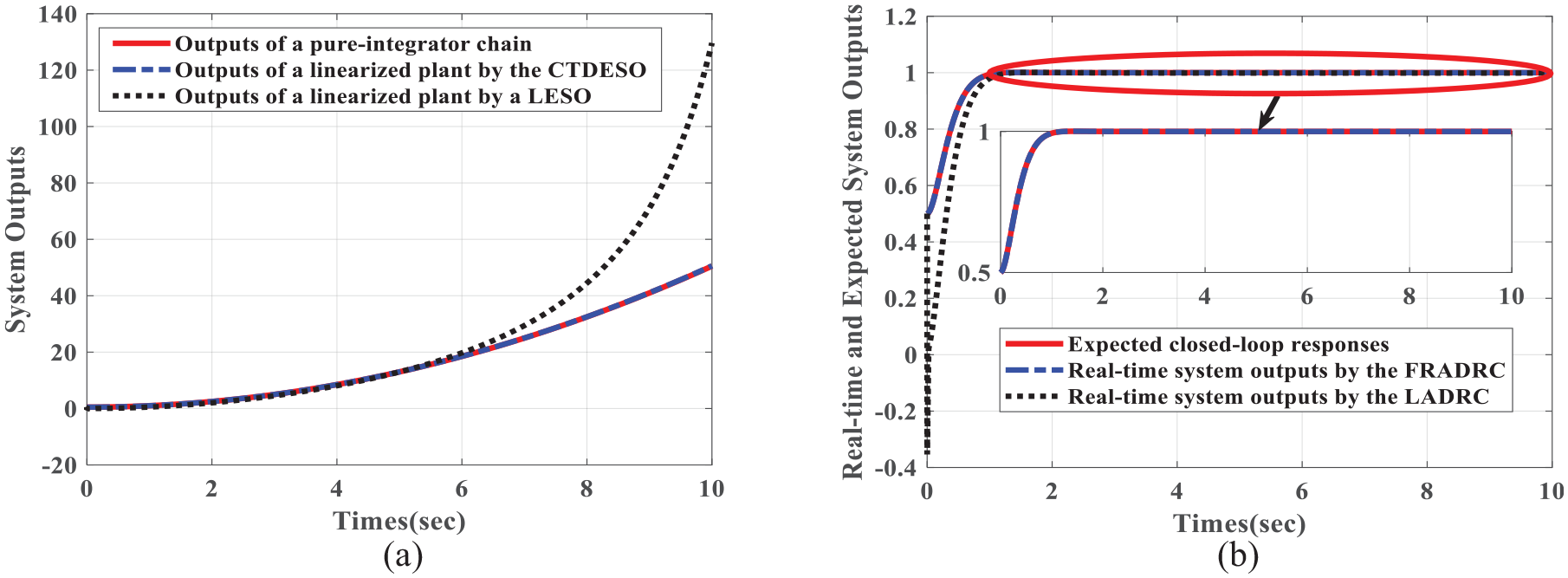
System responses after linearization (III).
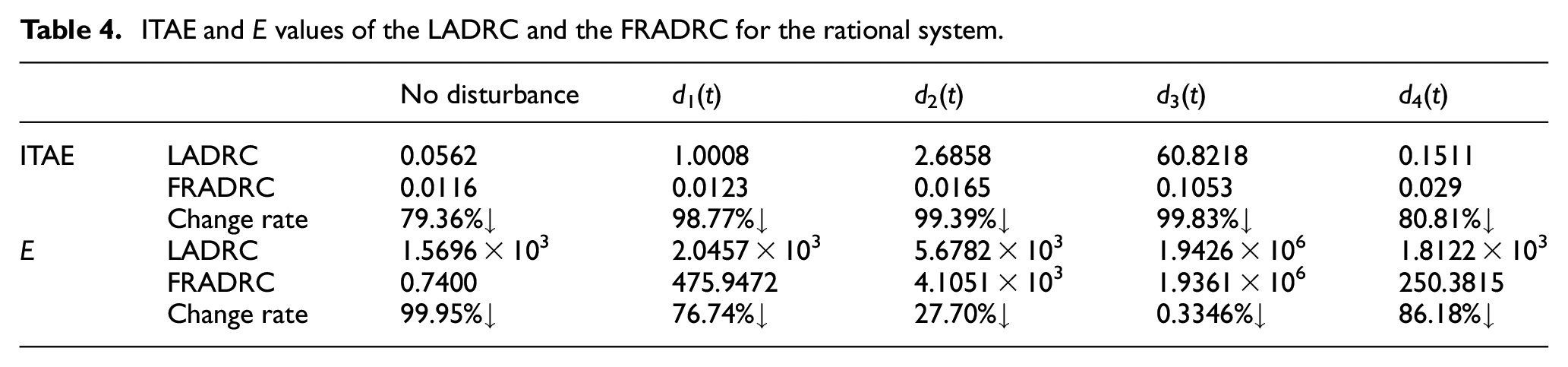
Let reference signal be a unit step signal, and let the system output be state x1. Figure 16 shows system state responses and control signals. System output x1 tracks the reference satisfactorily. States x2 and x3 also converge to stable constant values. Obviously, with the same control parameters, the FRADRC behaves much better than the LADRC. Table 4 also shows a fact that, no matter whether external disturbance exists or not, the FRADRC get much smaller ITAE values with smaller control energies. Both Figure 16 and Table 4 confirm the advantage of the CSTDE and the CTDESO.
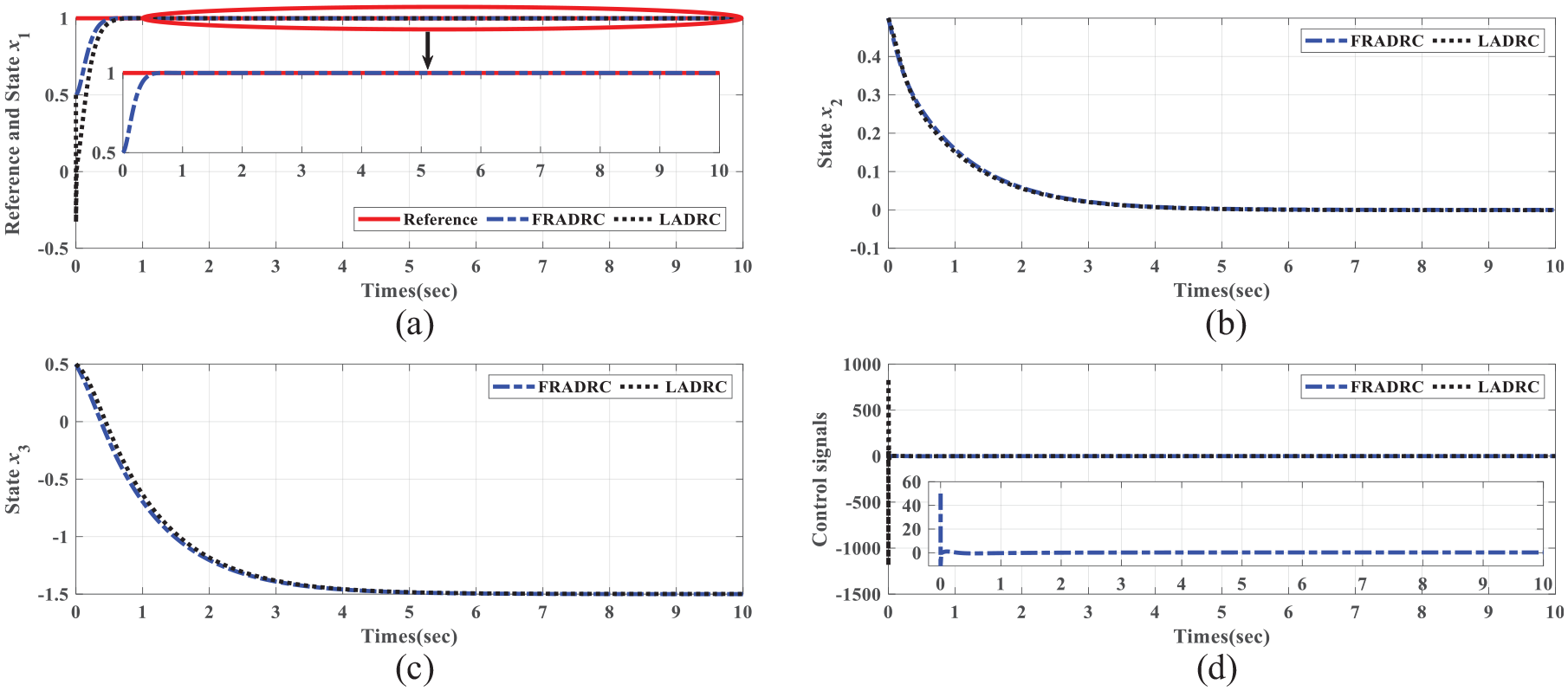
System responses and control signals without external disturbances (III): (a) state x1, (b) state x2, (c) state x3, and (d) control signals.
ITAE and E values of the LADRC and the FRADRC for the rational system.
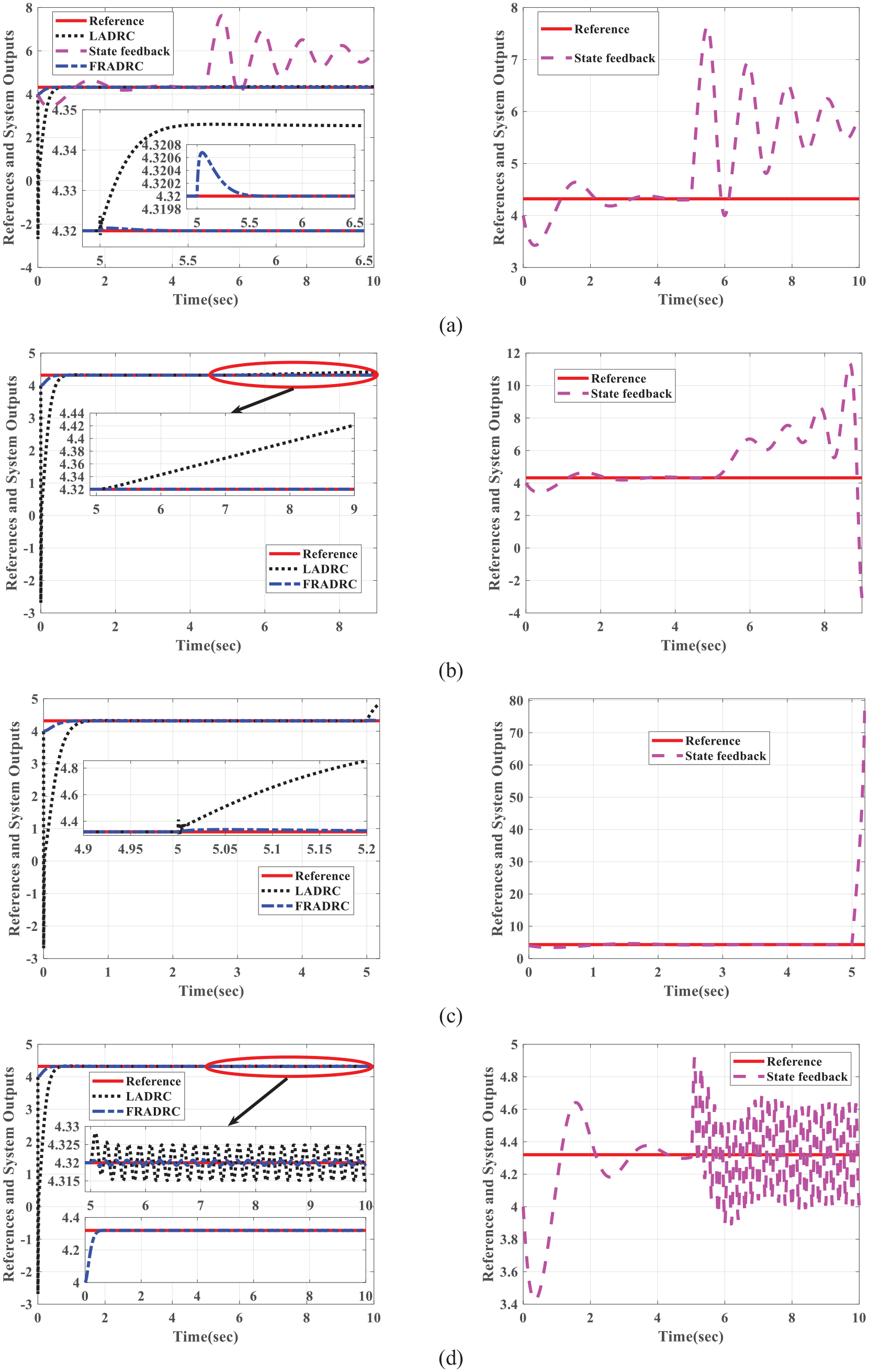
The FRADRC realizes the desired closed-loop performance in absence of external disturbance. In this section, disturbance rejection ability is verified by introducing kinds of external disturbances given in Figure 7. System outputs are presented in Figure 17 to highlight the advantage of the CTDESO and the FRADRC.
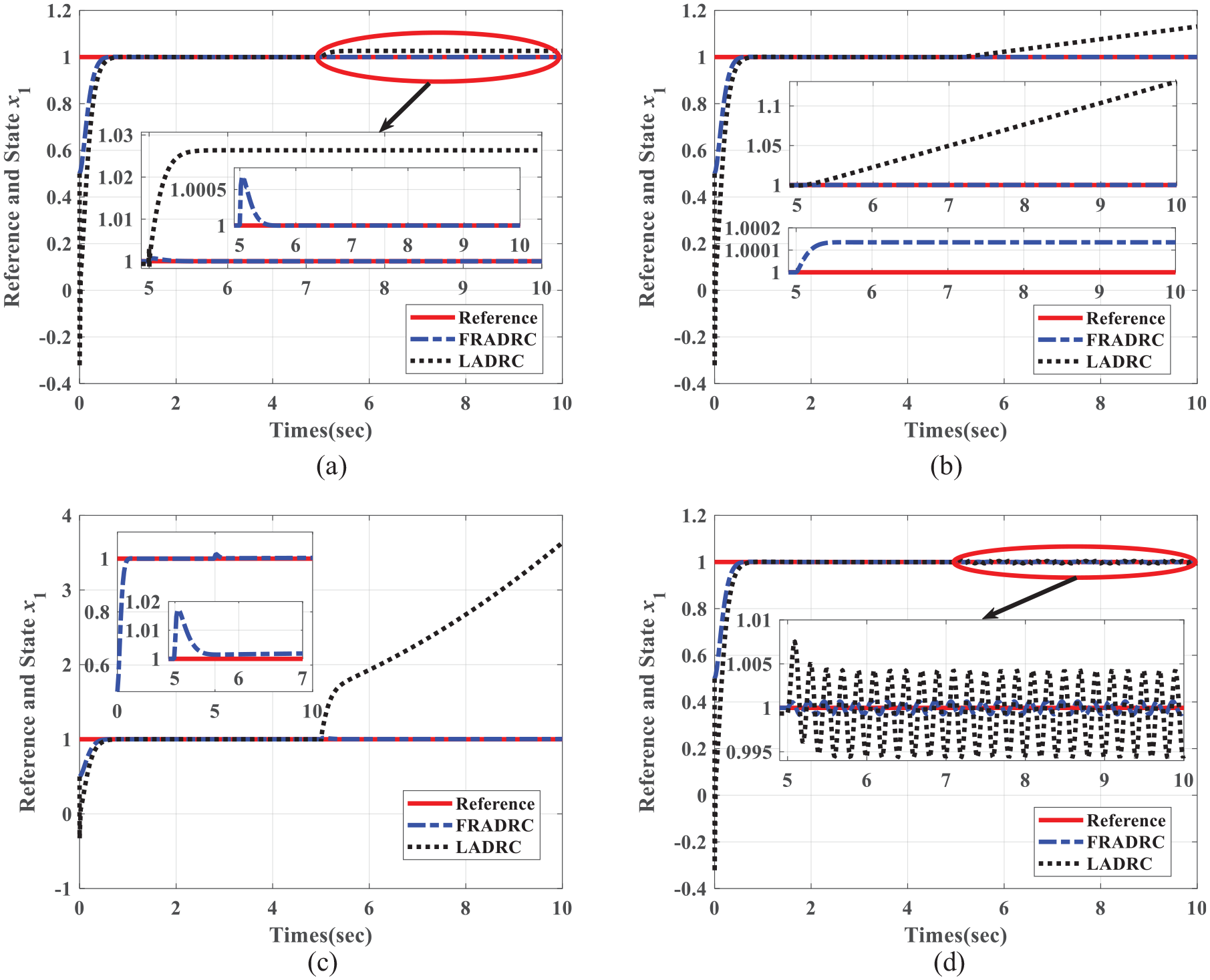
System outputs in presence of external disturbances d1–d4: (a) step responses in presence of d1(t), (b) Step responses in presence of d2(t), (c) step responses in presence of d3(t), and (d) step responses in presence of d4(t).
In can be found that, as a result of the more effective total disturbance estimation, the FRADRC is able to get more satisfactory performance. Specially, for the sloping and parabolic type external disturbances, the CTDESO shows its power and the FRADRC achieves more acceptable responses. ITAE and E values listed in Table 4 also depict above facts.
A nanopositioning stage
In this example, a nanopositioning stage is considered, and its structure is given in Figure 18. Here, u is the control signal (input voltage) of the stage, and y is the displacement of the stage.

Structure of a nanopositioning stage.
System model of the nanopositioning stage can be described as 24

where v = H(u) is the hysteresis model, ξ is the damping ratio of the stage, ω is the natural frequency, and K is the nominal gain. The Bouc-Wen hysteresis model can be described as a first-order model 24
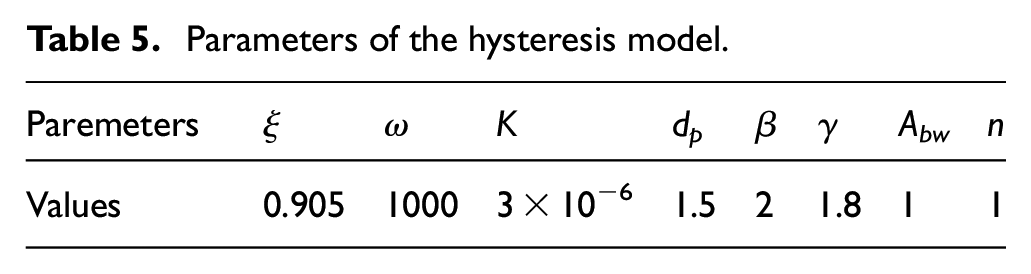
where u(t) is the input of the stage, v(t) is the output of the hysteresis, h is a state variable that represents the hysteretic phenomena, dp is a stiffness coefficient, Abw controls amplitudes of the hysteresis, parameters β, γ, and n decide the shape of the hysteresis. Parameter values are listed in Table 5.
Parameters of the hysteresis model.
Here, a step signal is set to be a reference signal. In following parts, our aim is to design controllers to drive the positioning system to track the set-value. The Euler method is also employed to solve the system, and the time step size is still fixed to be 0.00001.
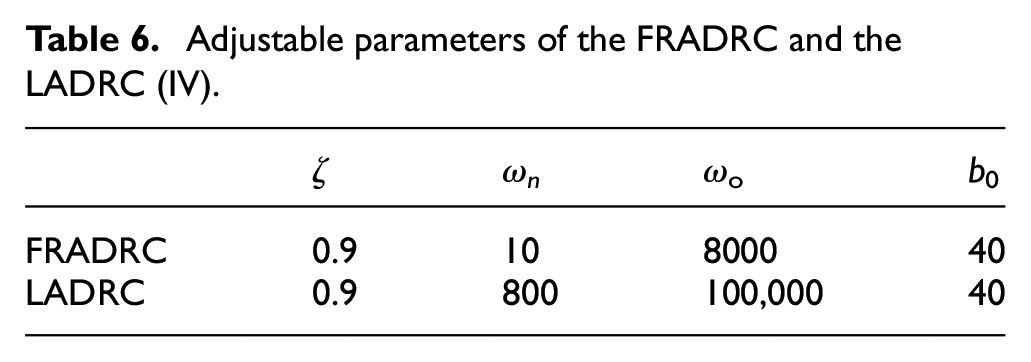
For this example, adjustable parameters are taken from Table 6. Responses of the linearized positioning stage are given in Figure 19. From Figure 19 and Table 6, one can find that the CTDESO outperforms the LESO in linearization since the compensation signal of the total disturbance estimation is utilized.
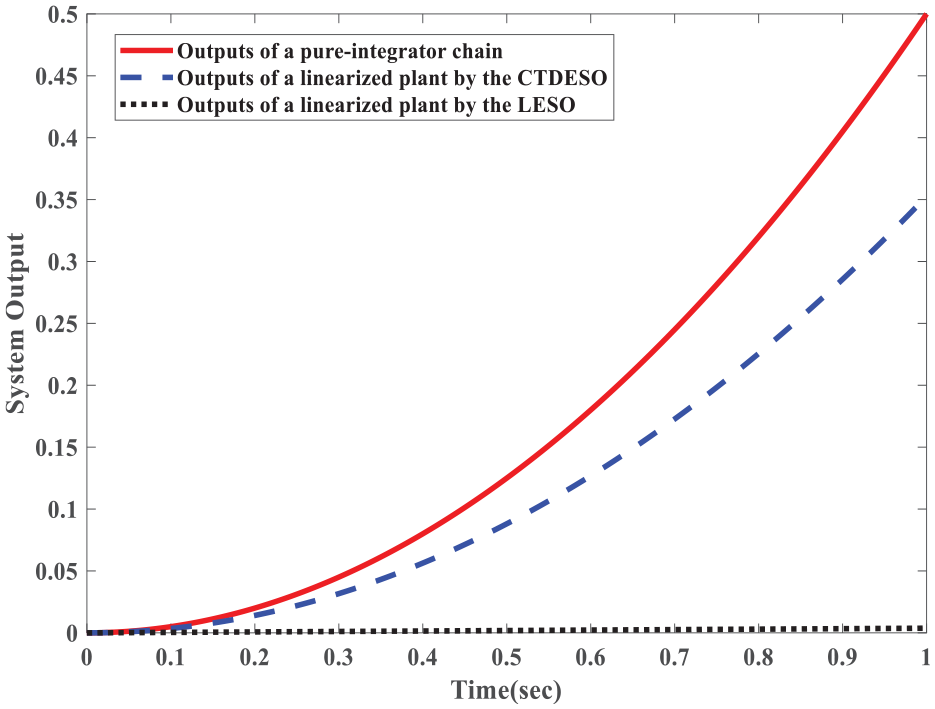
System responses after linearization (IV).
Adjustable parameters of the FRADRC and the LADRC (IV).
In absence of any external disturbance, system step responses are described in Figure 20. It is easy to get a conclusion that, with similar control energies, the FRADRC can get much faster step response and shorter convergence time of the tracking errors. Data listed in Table 7 also confirm the facts shown in Figure 20.
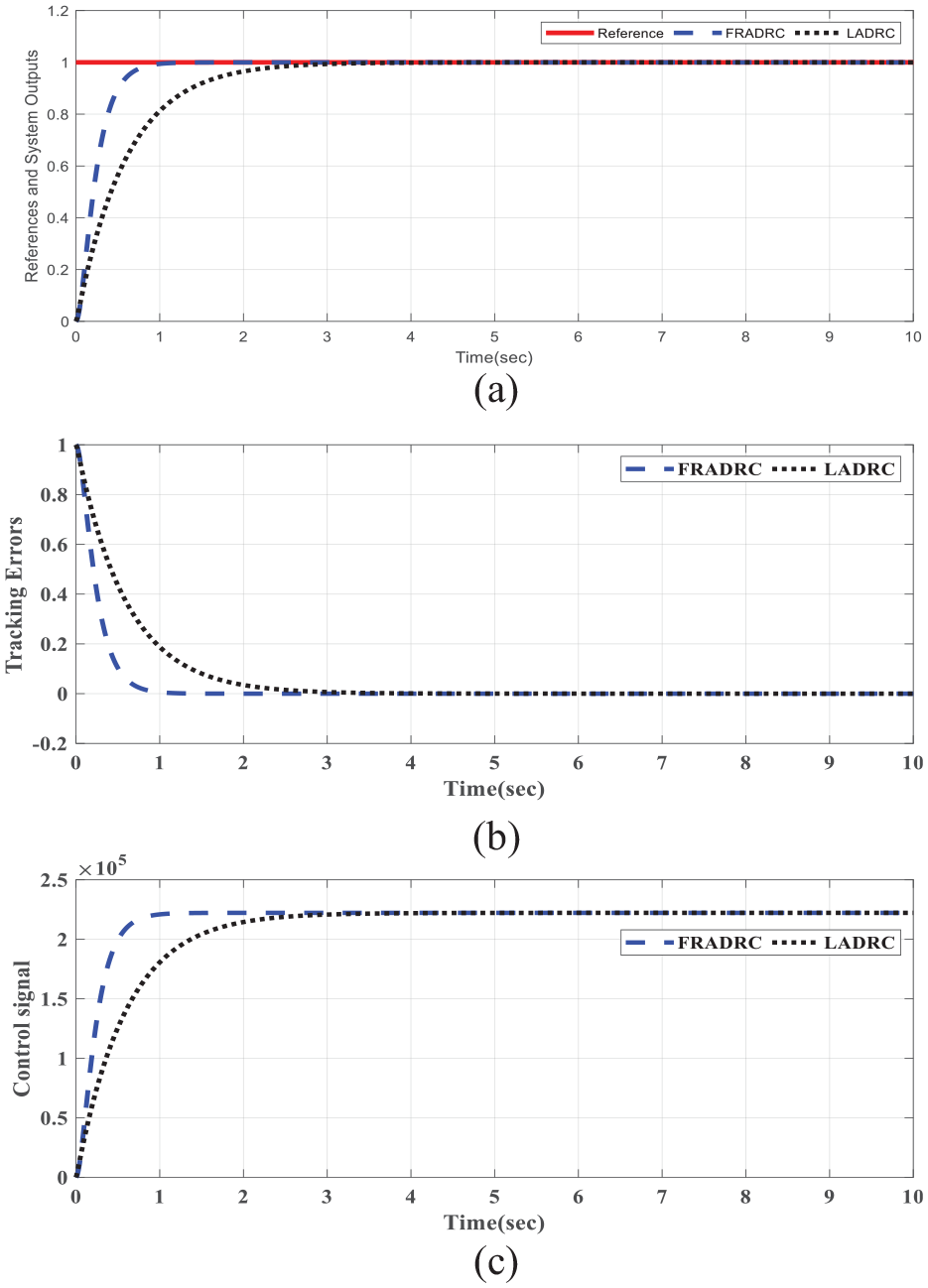
System responses and control signals without external disturbances (IV): (a) step responses, (b) tracking errors, and (c) control signals.
ITAE and E values of the LADRC and the FRADRC for a nanopositioning stage.
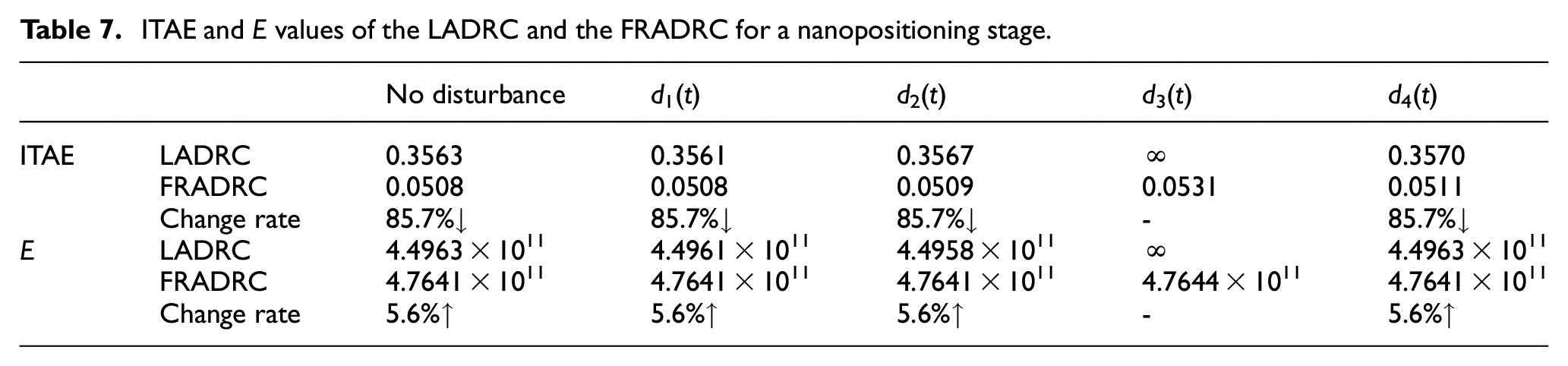
In this part, disturbance rejection ability of the proposed FRADRC and the LADRC is compared. To verify the disturbance rejection ability, the introduced disturbances are defined in (28). From data listed in Table 7 and Figure 21(a)–(d), one can find that, for the step disturbance, the slope disturbance, the parabolic disturbance and the sinusoidal disturbance, the FRADRC is superior to the LADRC in terms of ITAE values. It means that the proposed CTDESO in the FRADRC outperforms the LESO in the LADRC. Moreover, from Figure 21(c) and the sixth column of Table 7, it is easy to get a conclusion that, when it comes to the parabolic disturbance d3(t), the LESO is weak and the LESO based LADRC fails. However, the CTDESO is powerful and the closed-loop performance by the FRADRC is still satisfactory in presence of the parabolic disturbance.
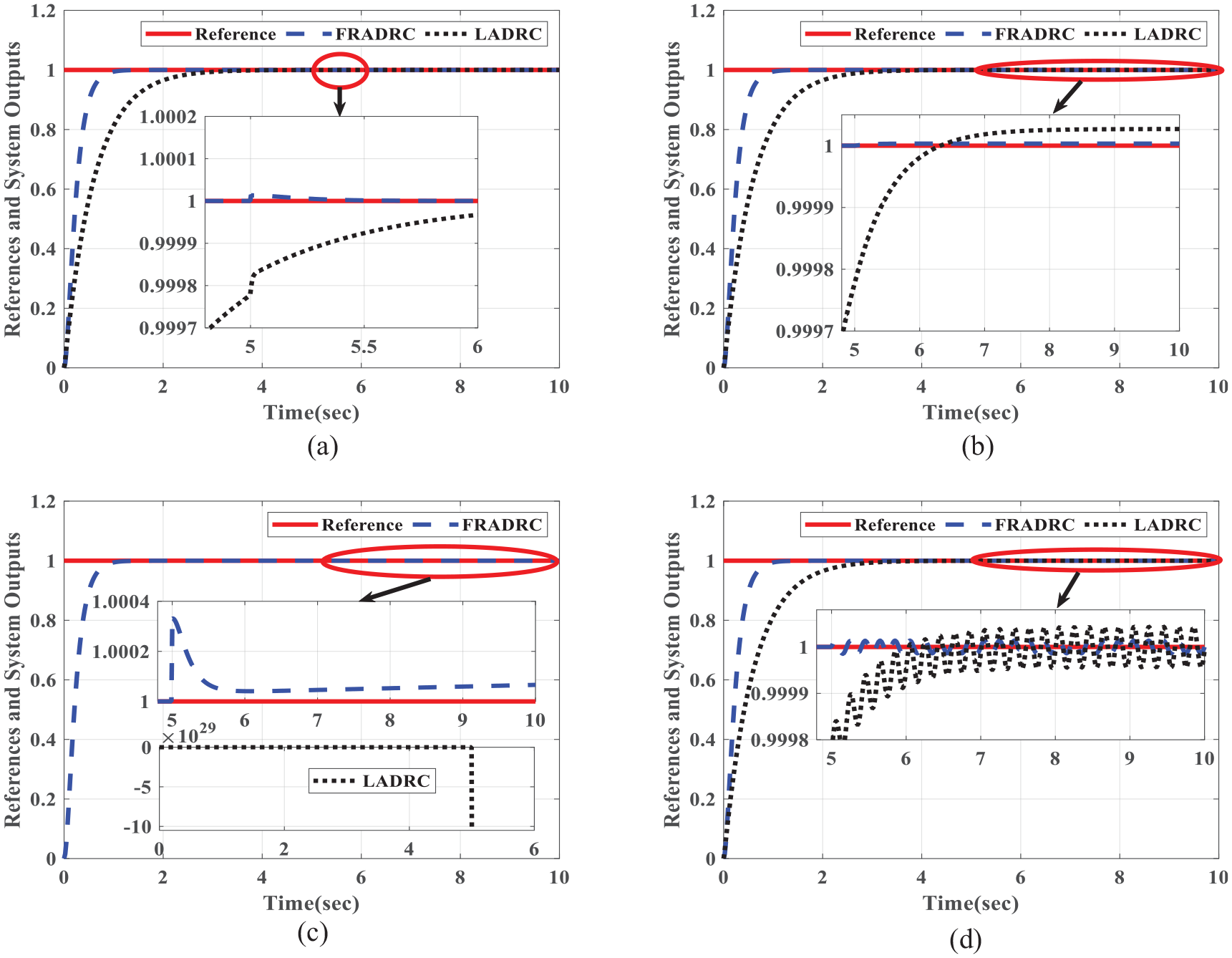
Displacements of the positioning stage in presence of external disturbances d1~d4: (a) step responses in presence of d1(t), (b) Step responses in presence of d2(t), (c) step responses in presence of d3(t), and (d) step responses in presence of d4(t).
Discussions
In this paper, four examples have been taken to make a confirmation of the FRADRC. Both system responses and performance indexes show that the CTDESO is more effective, and the CTDESO based FRADRC can obtain more satisfactory closed-loop performance. In this section, the third example is considered, and some discussions have been made on those adjustable parameters to make their influence clearer.
Table 8 gives out parameters. For Case I–Case III, one can find the influence of the damping ratio
Parameters of the FRADRC.
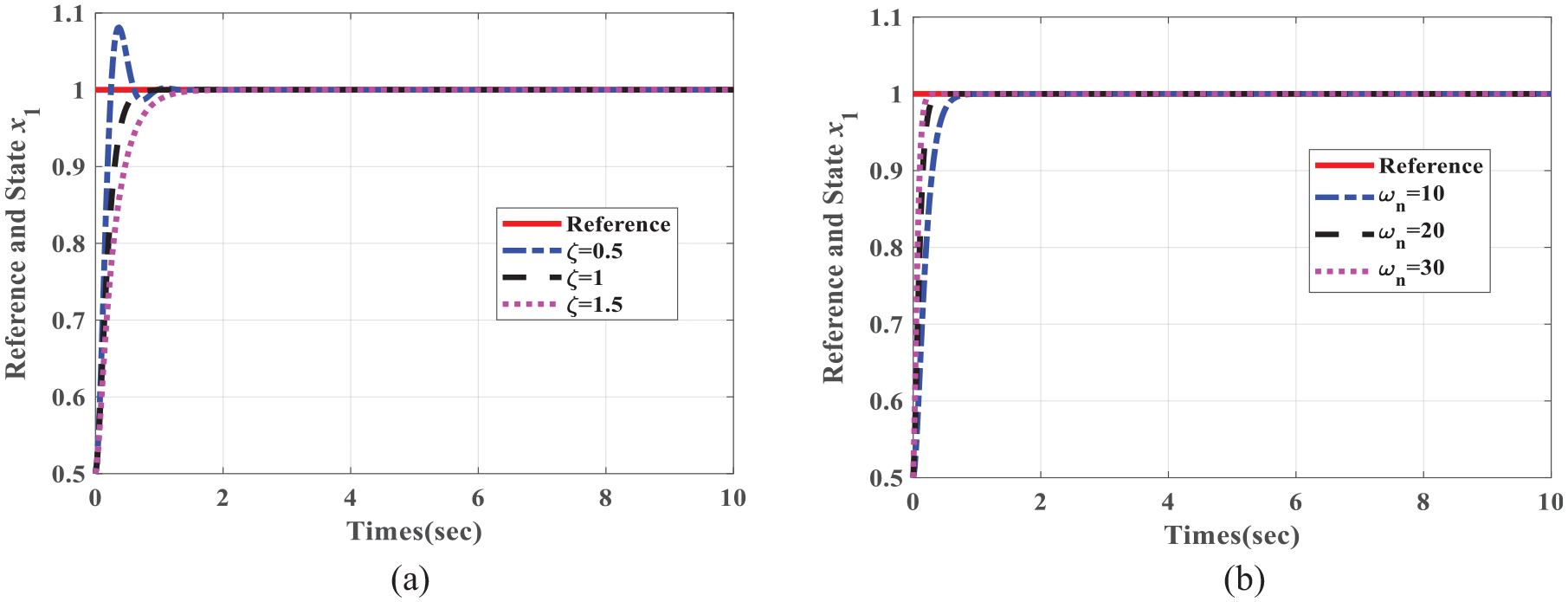
Step responses of Case I–Case VI: (a) Step responses of different damping ratios and (b) Step responses of different ω n s .
From Figure 22(a), one can see that, in Case I, when
Figure 23 shows ITAE values when different observer bandwidths and natural frequencies are taken. Figure 23(a) describes that, when ζ and ωn are fixed, if the observer bandwidth is increased, the ITAE values is reduced. However, when the observer bandwidth is increased from 200 to 250 rad/s, the ITAE value keeps the same. Furtherly, the observer bandwidth is fixed at 200 rad/s, and the nature frequency ωn is increased from 10 to 50. System response becomes faster, and Figure 23(b) depicts the decreasing tendency of the ITAE when the nature frequency is increased. From Figure 23, one can find that both the observer bandwidth and nature frequency are helpful to improve the speed and accuracy of the system response. However, when the observer bandwidth is large enough, it will not affect the ITAE values, and then the nature frequency plays a great role in determining the system performance.
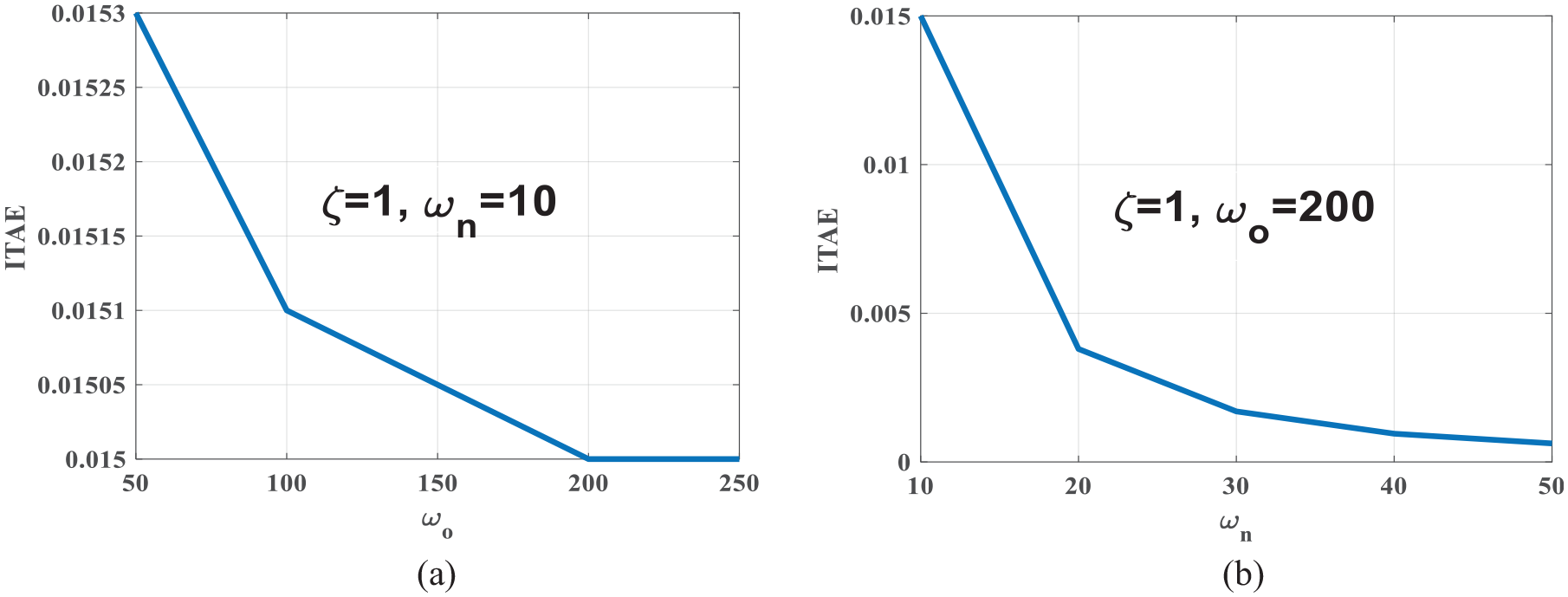
ITAE values for different ωo and ωn: (a) ITAE values when ω o changes and (b) ITAE values when ωn changes.
In short, the CTDESO is powerful in linearizing a nonlinear system with/without external disturbance. Based on the CTDESO, the FRADRC is effective in nonlinear system control. Furthermore, based on the CTDESO, one can design a closed-loop nonlinear control system via a sophisticated linear control technique, and the system performance can be analyzed via linear system theory. It makes the nonlinear system control become easier and more practical.
Conclusion
In this paper, based on the CTDESO, a nonlinear system control technique is proposed. By linearizing a nonlinear system, a prescribed closed-loop system dynamic can be realized. There is no need to identify the nonlinear system dynamics. Thus, it simplifies the nonlinear system control design. Numerical results also confirm the proposed FRADRC is much more effective in face of four typical nonlinear systems. In addition, based on the linearized plant, any linear system control approach can be introduced to the nonlinear control system design seamlessly. Therefore, it provides a more effective and inclusive approach to deal with the control problem of a nonlinear system. Nevertheless, the proposed approach is an observer-based way. It needs a more powerful observer to make a more effective linearization. Simultaneously, if a model of the controlled nonlinear system is available, one can incorporate the model information into the observer design, which will also improve the estimation ability of an observer. Therefore, it is an alternative way to enhance an observer. Moreover, an advanced observer also deserves more attention.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by the Fundamental Research Funds for the Central Universities (2022RC22), and National Natural Science Foundation of China (No. 61873005).