In this paper, an adaptive bearing rigid formation control strategy for a class of nonlinear system with unknown dead-zone inputs and external disturbance is proposed. Firstly, the I-Type fuzzy system is used to approximate the unknown nonlinear dynamics of the formation model, and the approximation errors and unknown external disturbance are eliminated by the parameter adaptive estimation. Furthermore, the adaptive dynamic estimation algorithm is utilized to estimate and compensate the unknown dead-zone parameters, effectively suppressing the impact of dead-zone on formation system performance. Finally, the stability of the formation system is proved based on LaSalle’s invariance principle, and the effectiveness of the algorithm is verified by simulation results.
In the last few years, the formation control of multi-agent systems has been widely applied in various fields such as collaborative combat, rehabilitation walking training robots in the medical field, formation flying of satellite formations in the aerospace industry, and the use of multiple drones for coordinated reconnaissance in disaster detection and military operations Zhang et al.,1 Nasrolahi et al.,2 Huang and Meng,3 Yuan et al.,4 Yang et al.5 This research focus has attracted extensive attention from researchers both domestically and internationally.
According to the definition of formation system Liang et al.,6 it can be generally classified into position-based formation control Li,7 distance-based formation control Bae et al.,8 and bearing-only formation control Zhao and Zelazo.9 Where the bearing-only formation control relies the least on position information, requires fewer sensors, and saves a significant amount of cost Zhao and Zelazo.10 It is also applicable to various scenarios Wu et al.,11 Li,7 Chen and Sun,12 Li et al.13 Therefore, this paper adopts the bearing-only formation control method that has been studied by multiple researchers. Zhao and Zelazo9 first proposed the bearing rigid theory which is applicable to arbitrary dimensions and applied it to the bearing-only formation control problem. Then Zhao et al.14 firstly solved the orientation synchronization problem. Liu et al.15 introduced the tethered control method into the design of adaptive distributed protocols, enabling effective adjustment of the formation positions among agents and significantly relaxing the communication topology constraints between agents.
However, the above literature all ignores uncertain factors such as nonlinear inputs, unknown external disturbance and environmental influences, et al. Because the physical devices such as actuators or sensors are not sensitive to some small signals, the dead-zone inputs exist in the robot systems Shen and Shi.16 Therefore, studying the dead-zone problem is of great significance. Liu et al.17 proposed an effective control strategy to solve the fixed-time control problem of the nonlinear systems with linear dead-zone inputs. Luo et al.18 utilized adaptive control techniques to propose a novel robust control algorithm for compensating the adverse effects of unknown dead-zone inputs, and the tracking control was realized. And Gao et al.19 investigated the tracking control strategy for the heterogeneous vehicles with unknown dead-zone inputs. The above research achievements have been made on the single robot control with dead-zone inputs, but there is little research on multi-robot formation control with unknown dead-zone inputs. Therefore, it is important to solve the distributed formation control problem of multi-robot systems with dead-zone inputs.
This paper investigates an adaptive back-stepping design technique for the multi-agent system with unkown nonlinear dead-zone inputs and external disturbance. To compensate for the impact of unknown dead-zone inputs and external disturbance on the formation system performance, an adaptive dynamic estimation method is employed. Furthermore, the I-Type fuzzy system is applied to approximate the unmodeled dynamics of the formation model. Finally, utilizing LaSalle’s invariance principle, it is proved that under the adaptive formation control strategy, the multi-robot systems can achieve the desired bearing rigid formation. Simulation results also validate the effectiveness of the distributed formation control law and adaptive law proposed in this paper.
Problem description
Description of the model
Consider a multi-agent system with agents, each of which is described by a nonlinear equation:
Where represents the location information of agent , and represents the dimension, denotes the speed of agent , unknown nonlinear function is the unmodeled dynamics of agent , and it is continuously differentiable. is the output of a dead-zone model with input , represents the external disturbance of agent . We also assume that , and is an unknown bounded constant vector, .
The nonlinear dead-zone input is described as follows:
Here, , and the dead-zone parameters in the above equation , , , , are unknown bounded non-zero constants.
For the convenience of subsequent analysis, let , , and let . Then the dead-zone model of equation (2) above can be redefined as:
To design a reliable control strategy, the unknown nonlinear dynamic is approximated using the -Type fuzzy logic system.
Define , is a compact set, where is arbitrarily large normal numbers. In addition, let is the approximation of in the interval . In other words, , where represents an adjustable parameter, , ; represents the number of rules of the fuzzy logic system. is the fuzzy basis function, it is defined as follows:
Where is usually taken as , where . Let , . , and the positive constant is the design parameter. In addition, let be the estimate of .
Define the approximation error and unknown bounded positive constant . Then can be converted into ..
We represent the communication relationship in formation by undirected topology graph , where denotes the set of nodes and represents the set of edges in the formation system. is the set of neighboring vertices of . Based on the bearing rigid theory, when we set relative angles for all edges in and simultaneously determine the scale factor and translation factor, the formation can be uniquely determined. So, we define the angle vector, respectively:
Where denotes the Euclidean distance, , . Then, denotes the angle of agent relative to its neighbor . Since the graph in this paper is undirected, we have , and all of the angle vectors are based on this global coordinate system.
In this paper, the location information is represented by . The directed graph can be obtained by giving a direction to the undirected graph . Label edges in graph from 1 to . At the same time, label the edges in the directed graph from to , and then we can get the association matrix . If the edge is , then all the elements on the row of the association matrix are zero except and , where the starting point of the edge is and the ending point . In order to make the formation design more convenient, the vector is defined as:
Here, represents the identity matrix, , and ⊗ denotes the Kronecker product.
Control goal: Consider a multi-agent system of agents with nonlinear dead-zone inputs, and its communication topology is defined by infinitesimal bearing rigidity. Assumed that all agents are not collide with each other during the movement, the distributed adaptive formation control law is designed to ensure that the multi-agent systems can achieve global asymptotically stable bearing rigid formation. That is, the close-loop system converges to , which is
Design of global stabilizers
Define the potential function as:
Where
Where , is the identity matrix, and , so
And the potential function of agent is
At the same time, let , , . Then system (1) can be rewritten as the following equation:
The bearing-only formation control law for the formal system with nonlinear dead-zone inputs and external diturbance is designed by use of the back-stepping design technique.
Step1: Consider the following subsystem of system (13):
We treat variables as virtual control inputs, here,
To ensure the specified desired angle between each pair of agents, we choose the Lyapunov function candidate as:
Owing to , is symmetric about , we have , then
We design as:
Then we can get
Step2: Introduce the error variable
Acoording to (19), the equation (13) can be rewritten as:
For the system (21), the Lyapunov function candidate is chosen as:
Differentiate the above formula, which is
The formation control law for the multi-agent system with nonlinear dead-zone inputs and external disturbance is designed as:
We design the adaptive law as:
Where , is a known constant vector, , is also a known constant vector. The sign function , . , are the estimation of , respectively.
Remark 1: From the control law (24), the sign function would cause the chattering phenomenon. In engineering practice, the saturation function is usually used to replace the sign function to solve the problem of chattering. When , ; when , , where represents the width of the boundary layer. Whether the saturation function or the sign function is used, the results in engineering practice and simulation results are unchanged.
Stability analysis
Theorem 1: For the multi-agent system (1), the graph is bearing rigid, and the potential energy function is selected as shown in equation (13). Under the control law (24) and adaptive law (25)–(26), the multi-robot system (1) gradually converges to the desired bearing rigid formation. That is, the relative angles between communication agents can reach the desired angle, and all agents’ velocities converge to zero. The bearing rigid formation system converges to the following set:
Proof:
Combining equations (3) and (24), we can get the following inference.
When , we have , so , we can get
In the same way, when , we have , so , we can get
Combine two equations above, we can draw the following conclusion
Lyapunov candidate function determined by equation (22), it is noted that is smooth and hence regular. Along with (24)–(26), we can get:
Here, . Let , combined with , , we have
Equation (29) proves that is non-increasing, and equation (22) shows that is not less than zero, so we can infer it has a limit . Define , so , then we get the following equation
Which means that exists and is bounded. Now we show that is also uniformly continuous. Assume that there are no collisions between agents, it is concluded that is not equal to zero, then we have is bounded because of . Since is also bounded, we have is uniformly continuous with . Because is continuous and uniformly continuous with , we get is uniformly continuous with . Using Barbalats’ Lemma, we have , which is
Similarly, we have
So we can derive that
Rewrite the equation (30) in matrix-vector form as follows:
We can get and . And the overal close-loop system converges to a set:
In other words, the multi-robot system achieves the globally stablized bearing rigid formation, and all agents’ velocities tend to zero.
Simulations
In this section, the formation model is established by MATLAB software, and two simulation cases in 2-D space and 3-D space are provied to check the validity of the formation control strategy. Consider the following simulation objects:
Where
Simulation for 2D
In the two-dimensional simulation, the desired formation-shape is expected to be a parallelogram. The specific parameters of simulation are chosen as follows.
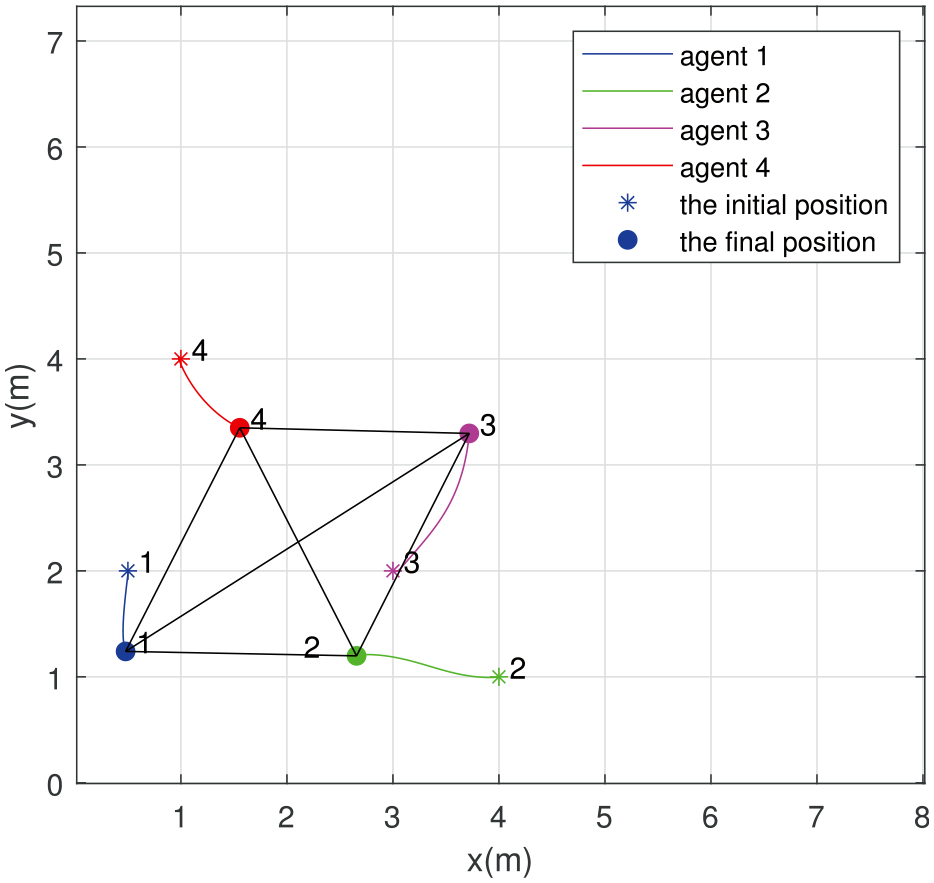
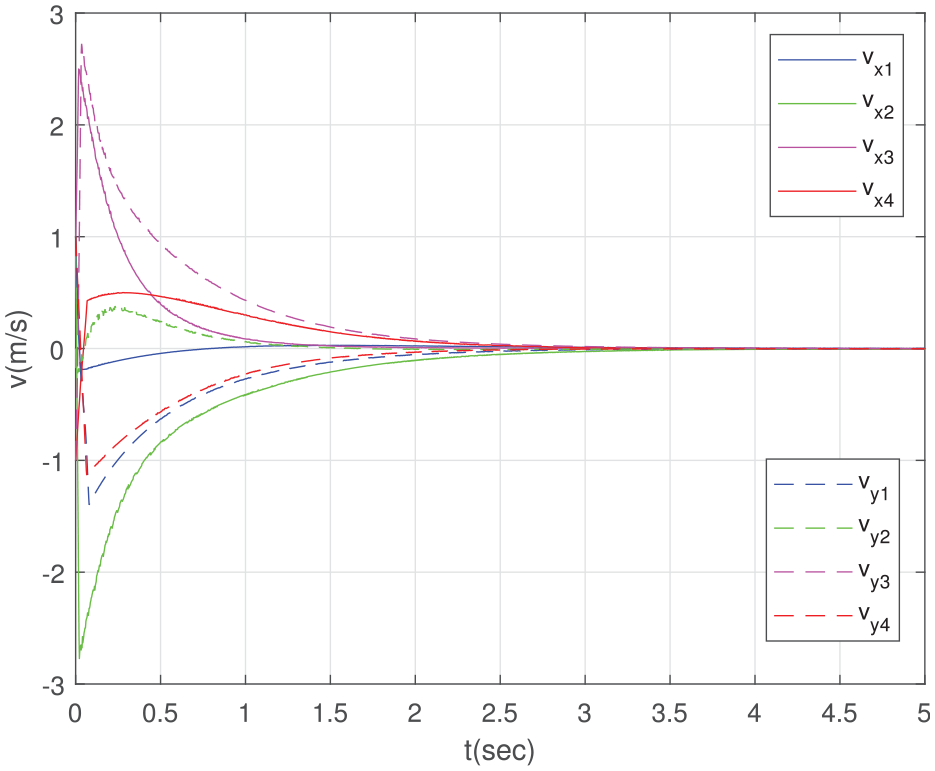
Set the initial position to: , , , . The agents’ initial velocities are: , , , . is the desired relative angle vector, the formation is a parallelogram, where , , , , , . The design parameters are chosen as:, , , , . The simulation figures are as follows.
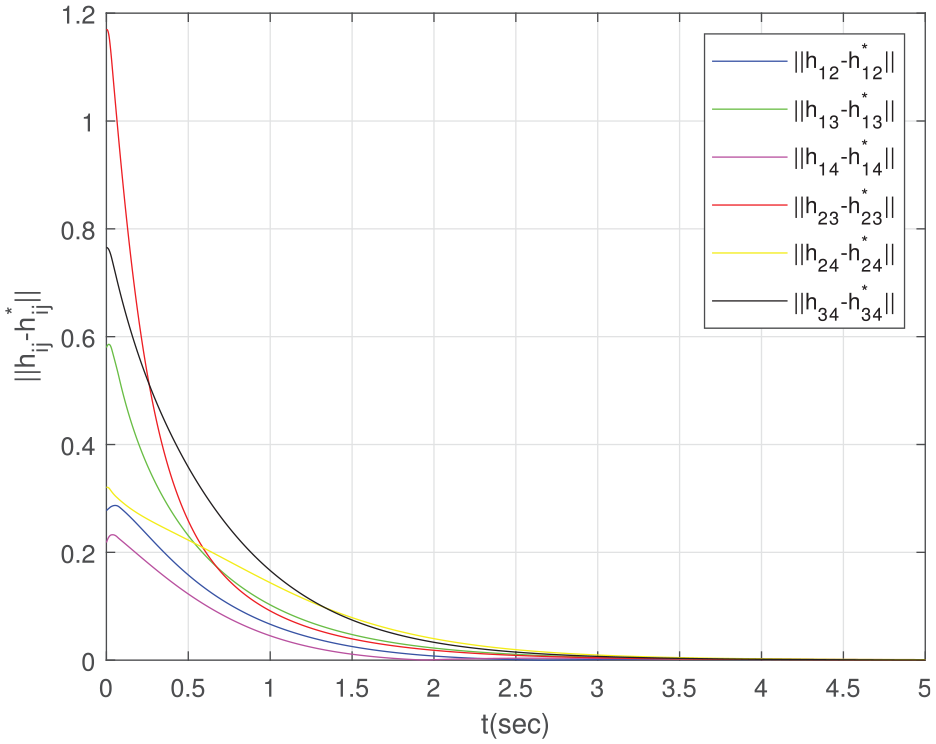
Figure 1 shows the trajectory of the four agents from the initial position to the target formation. It can be seen that the four agents form the designated target formation from any initial position, namely the formation shape of the parallelogram. Figure 2 shows that after the agents’ movement, the relative angle errors between each agent gradually decrease until they completely converge to zero. The velocity component of the agent eventually tends to zero, which is shown in Figure 3. According to the above analysis, we conclude that the bearing-only formation controllers achieve the preset function, and the validity of the formation control strategy in 2-D space is verified.
The trajectories of agents.
The bearing errors .
The velocities of agents.
Simulation for 3D
In the three-dimensional simulations, six communication agents are used, and the desired formation is a triangular prism. The specific parameters of simulation are chosen as follows.
Set the initial position to: , , , , ,. The agents’ initial velocities are: , , , , , . the desired relative angle vector is , which means the desired formation is a parallelogram. After calculating, we conclude that , , , , , , , , , . , , , , . The simulation figures are as follows.
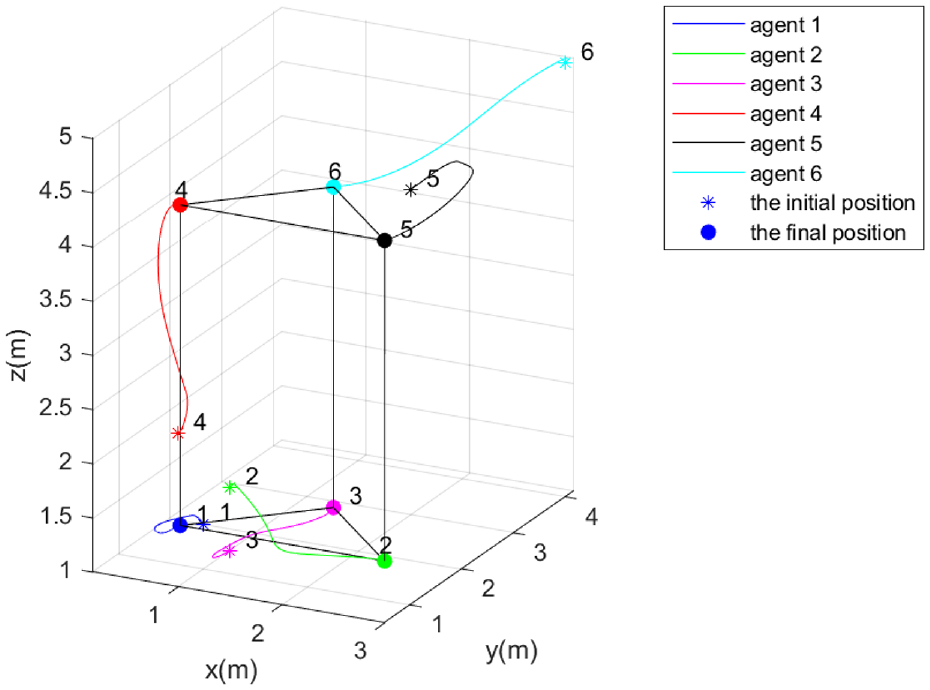
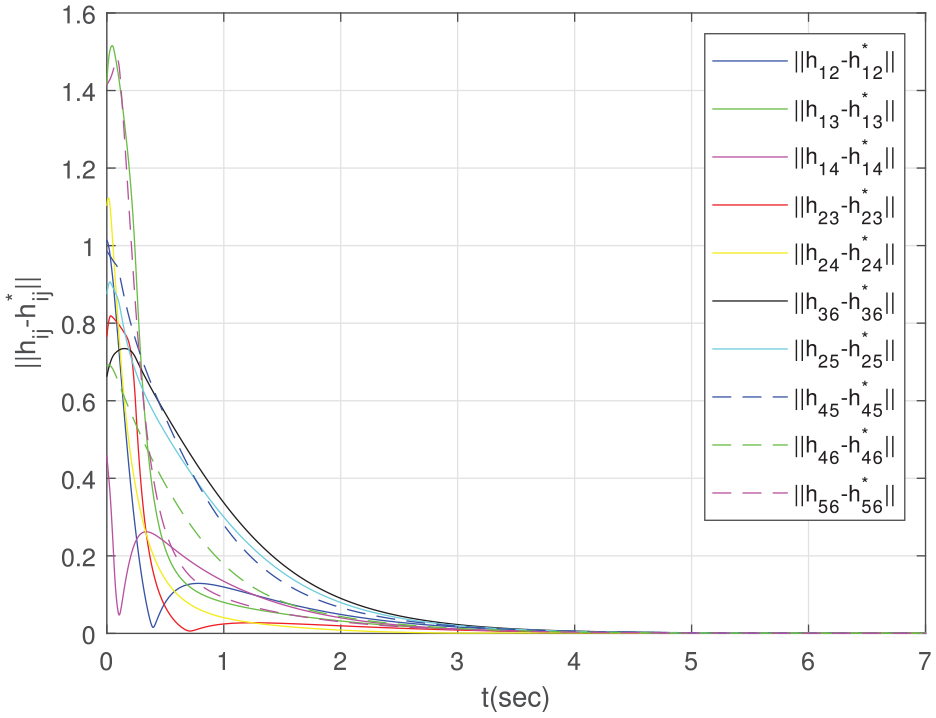
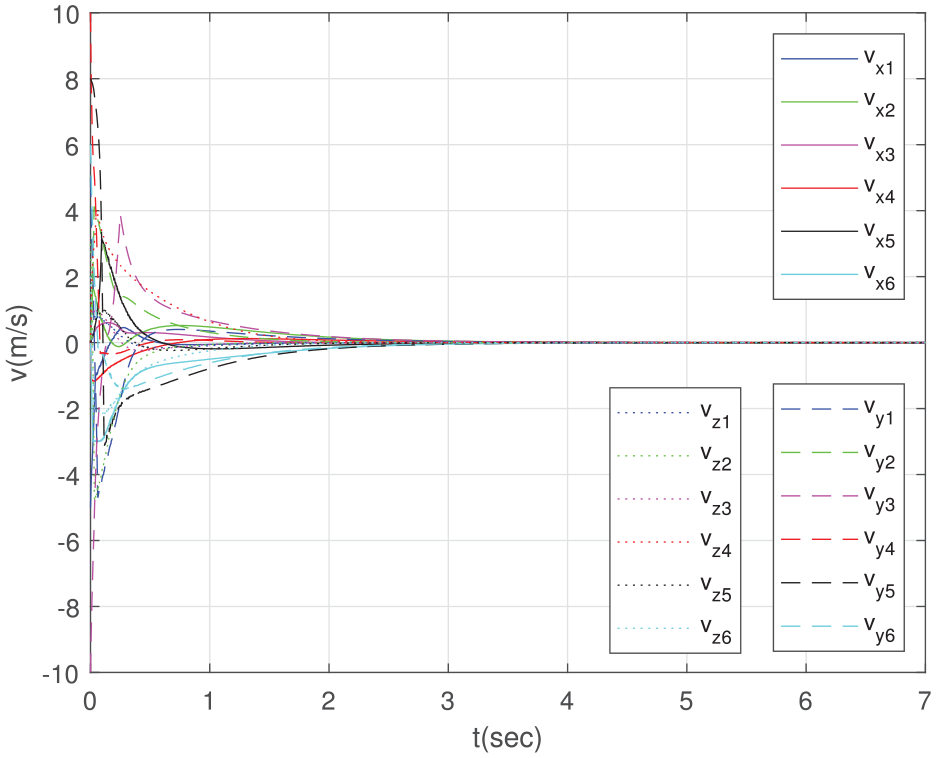
Figure 4 shows the movement of six agents from the initial positions to the target formation-shape. Figure 5 shows the relative angle errors between each agent gradually decrease until they completely converge to zero. The velocity component of six agents eventually tends to zero, which is shown in Figure 6. The simulation results show the validity of the formation control algorithm in 3-D space.
The trajectories of agents.
The bearing errors .
The velocities of agents.
Conclusions
This paper proposes an adaptive fuzzy formation control strategy for the multi-robot system with nonlinear dead-zone inputs, unmodeled dynamics and external disturbance. Firstly, an adaptive dynamic estimation is introduced to estimate and compensate the nonlinear dead-zone inputs and external disturbance, so the effect of nonlinear dead-zone inputs on formation system performance is effectively suppressed. Then, using LaSalle’s invariance principle, the global stability of the formation system is proved. Finally, the validity of the proposed formation control algorithm is verified by 2-D and 3-D simulation experiments.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by NSFC under Grants 61973266, 62273300, the Foundation of Key Laboratory of National Defense Science and Technology under Grant JSY6142219202115 and the Project of Xuzhou Key Research and Development under Grant KC21080.
ORCID iD
Qin Wang
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
1.
ZhangGWangYWangJ, et al. Disturbance observer–based super-twisting sliding mode control for formation tracking of multi-agent mobile robots. Meas Control2020; 53(5-6): 908–921.
2.
NasrolahiSAbdollahiFRezaeeH.Decentralized active sensor fault tolerance in attitude control of satellite formation flying. Int J Robust Nonlinear Control2020; 30: 8340–8361.
3.
HuangYMengZ.Bearing-based distributed formation control of multiple vertical take-off and landing UAVs. IEEE Trans Control Netw Syst2021; 8(3): 1281–1292.
4.
YuanZWuBHeJ, et al. Leader–follower formation source seeking control of multiple ships using sliding mode active disturbance rejection observer. Meas Control2021; 54(5-6): 737–747.
5.
YangZChenCZhuS, et al. Distributed entrapping control of multi-agent systems using bearing measurements. IEEE Trans Automat Contr2021; 66(12): 5696–5710.
6.
LiangSWangFChenZ, et al. Formation control for discrete-time heterogeneous multi-agent systems. Int J Robust Nonlinear Control2022; 32(10): 5848–5865.
7.
LiLKuangCGXiaYQ, et al. Formation control of nonholonomic mobile robots with inaccurate global positions and velocities. International Journal of Robust and Nonlinear Control 2022, 32(18): 9776–9790.
8.
BaeYBLimYHAhnHS.Distributed robust adaptive gradient controller in distance-based formation control with exogenous disturbance. IEEE Trans Automat Contr2021; 66(6): 2868–2874.
9.
ZhaoSZelazoD.Bearing rigidity and almost global bearing-only formation stabilization. IEEE Trans Automat Contr2016; 61(5): 1255–1268.
10.
ZhaoSZelazoD.Translational and scaling formation maneuver control via a bearing-based approach. IEEE Trans Control Netw Syst2017; 4(3): 429–438.
11.
WuKHuJLennoxB, et al. Finite-time bearing-only formation tracking of heterogeneous mobile robots with collision avoidance. IEEE Trans Circuits Syst II Express Briefs2021; 68(10): 3316–3320.
LiJZhangAPengC.Neuro-adaptive cooperative control for a class of high-order nonlinear multi-agent systems. Meas Control2023; 56(5-6): 928–937.
14.
ZhaoJYuXLiX, et al. Bearing-only formation tracking control of multi-agent systems with local reference frames and constant-velocity leaders. IEEE Control Syst Lett2021; 5(1): 1–6.
15.
LiuXWuXXieY, et al. Fully distributed adaptive time-varying formation control of singular multiagent systems. Neurocomputing2023; 516: 146–154.
16.
ShenQShiP.Output consensus control of multiagent systems with unknown nonlinear dead zone. IEEE Trans Syst Man Cybern Syst2016; 46(10): 1329–1337.
17.
LiuSNiuBZongG, et al. Adaptive fixed-time hierarchical sliding mode control for switched under-actuated systems with dead-zone constraints via event-triggered strategy. Appl Math Comput2022; 435: 127441.
18.
LuoXMuDWangZ, et al. Adaptive full-state constrained tracking control for mobile robotic system with unknown dead-zone input. Neurocomputing2023; 524: 31–42.
19.
GaoZZhangYGuoG.Adaptive fixed-time prescribed performance control of vehicular platoons with unknown dead-zone and actuator saturation. Int J Robust Nonlinear Control2023; 33: 1231–1253.