
Abstract
The traditional Harris Hawks optimization algorithm is prone to the local shortest path, slow search speed and poor path accuracy in indoor mobile robot path planning. For the above problems, a multi-strategy improvement of the Harris Hawks optimization algorithm (MIHHO) is proposed. In this study, a Chebyshev chaotic mapping strategy is used to increase the diversity of the Harris Hawk population, improve the global search performance of the Harris Hawk algorithm, and prevent being trapped in the locally optimal path. A fusion exploration mechanism is proposed to fuse the discovery mechanism of the sparrow algorithm with the exploration mechanism of the HHO. Then the influence factor E is improved to improve the algorithm’s search accuracy and search efficiency, and finally, in the design of a dynamic Lévy flight strategy, which accelerates the convergence speed of the algorithm and improves the robot planning speed. Simulation results show that the proposed MIHHO method exhibits better search performance in path planning, improved planning efficiency, and superior quality of planned paths.
Keywords
Introduction
In indoor mobile robots, path planning is an important technique that essentially plans the shortest path from the current to the target position with specific application requirements or optimization criteria (stability, path minimization, energy consumption, etc.).Path planning techniques are used in many fields, such as indoor sweeping robots, 1 logistics robots, 2 food delivery robots, 3 agricultural robots, 4 etc. Path planning is further divided into local planning and global planning. The traditional international path planning methods include A* algorithm,5,6 Dijkstra algorithm,7,8 RRT algorithm,9,10 etc. Local path planning is when the robot collects information about the current environment and moves from the current position to the next node. Standard local path planning methods include the APF11,12 and DWA.13,14 Traditional planning methods have good robustness, but the computation is more complex, and the computation time increases exponentially as the map increases; some are only suitable for some simple scenario planning, and the generality is poor.
Intelligent bionic algorithms are widely used in path planning, for example, particle swarm algorithm (PSO),15,16 grey wolf algorithm (GWO),17,18 and whale algorithm (WOA),19,20 due to their simple structure better performance for easy understanding, less reliance on mathematical models, and high exploration and exploitation capabilities. The algorithm searches and shortens the planned paths by seeking the optimal iterations until it reaches the maximum number of iterations set and solves a short and feasible path, which gradually becomes the heuristic branch of the path planning method. HHO21,22 is a new intelligent bionic algorithm characterized by fewer parameters, generality for easy application and simple structure. It is suitable for using and exploring various complex environments and is widely used in various engineering problems. Harun 23 and Chen 24 improved the search speed of the algorithm by reducing the position update strategy in the HHO and adding the DE mechanism in the search phase, respectively, but did not take into account the problem of balancing the global and local search of the algorithm, and the search accuracy was low. Vikram 25 and Kashif et al. 26 both fused HHO with the Sine Cosine Algorithm (SCA) to strengthen the exploration ability in the development phase of the algorithm and through comparison with other algorithms and application engineering problems, it was concluded that the exploration performance of the algorithm was improved – still, the algorithm’s ability to solve multidimensional and complex issues needed to be stronger. Li et al. 27 added the improved Rosenbrock method to the development phase of the HHO. Kang 28 added an improved Brownian motion strategy in the development phase, and Zhou 29 added a differential evolution strategy and an update strategy based on the bioenergy consumption pattern. All three methods improve the local search ability of the algorithm to avoid falling into the local optimums. Still, the weak global search ability in the search phase of the algorithm has yet to be considered, which is prone to significant errors.
Wang 30 and Guo 31 used an elite-based non-dominated sorting mechanism to select the optimal solution set strategy for the Harris hawk population, respectively, and added quasi-inverse learning and quasi-reflective learning strategies to HHO and verified that the global search ability of the two improved algorithms was improved through test functions and engineering problems. Still, due to the complexity of the computational process, the algorithms have reduced the search speed, and it is more time-consuming in the face of more complex nonlinear problems. Liu 32 set up a multi-subgroup square neighborhood topology and fixed replacement probability to guide the individuals in the subgroups to be able to forage randomly in both vertical and horizontal directions to strengthen the information exchange among the individuals in each subgroup. Wu 33 introduced a flexible decreasing strategy in HHO. The two improved algorithms improved the balanced performance of the global and local searches. Still, the overall search capability of the algorithms was reduced, and the accuracy could have been better.
The analysis of the already improved HHO algorithms mentioned above concludes that they still need to improve in solving a wide range of unknown and complex problems. In this paper, an improved Harris Hawkes optimization algorithm (MIHHO) is proposed with the following main contributions:
Using Chebyshev chaotic mapping initial Harris Hawk population and introducing the discoverer mechanism of Sparrow’s algorithm in the exploratory phase to enrich the population’s diversity and improve the algorithm’s global search capability.
Improve the energy factor E to strengthen the regulation of global search and local search by adjusting the occupancy ratio to enhance the generality and universality of the algorithm.
introduce a dynamic nonlinear strategy to regulate the Levy flight to improve the algorithm search stability and efficiency.
Using eight test functions in MATLAB to do adaptation degree-seeking comparison experiments and three different complexity indoor environments to do path planning simulation comparison experiments, it is verified that MIHHO is better in adaptation degree-seeking ability. The problems of local shortest path and search performance of the robot in path planning are effectively improved. The path quality is significantly enhanced by comparing with the three improved HHO34–36 four other types of algorithms.16,18,20,37
The remaining chapters of this paper are organized as follows: Chapter 2 introduces the basic principles and mathematical model of the Harris Hawks algorithm; Chapter 3 analyzes the shortcomings of the Harris Hawks algorithm and proposes improvement strategies; Chapter 4 verifies the effectiveness of the improvements by testing functions and path planning experiments; Chapter 5 concludes.
HHO algorithm
The Harris Hawks optimization algorithm 22 was proposed in 2019 by Heidari et al. The algorithm mimics the predatory behavior of the Harris Hawks. The predatory tactics of this animal are mainly surprise attacks, taking into account the ability and state of escape of the prey, using different forms of encirclement and swooping to kill, divided into three main phases: the search phase, the search and exploitation conversion phase, and the exploitation phase. The search phase mainly performs a global search, the search and exploitation conversion phase reconciles the global and local tracking, and the exploitation phase conducts a provincial examination. Based on the energy factor E variation, alternating global and regional exploration is performed, E∈[−2,2].
(1) Exploration phase. At this time|E|≥1, the Harris Hawks move, observe and search for prey or are perched among the Hawks with the following specific mathematical model expression:

Where:

Where: N means the population size and i denotes the i-th Harris Hawks.
(2) Exploration and exploitation transition phase. The Harris Hawks switch between the search and exploitation phases according to the escape energy of the prey, controlled by the energy factor E. The mathematical model expression is as follows:

Where: t means the current number of iterations, T means the maximum number of iterations, and
(3) Exploitation stage. At this point|E| < 1, the Harris Hawks search phase was converted to the exploitation phase. According to the type of prey caught and the different prey escape abilities, Heidari scholars designed four types of roundups: hard roundup, soft roundup, progressive fast dive soft roundup, progressive fast dive hard roundup and based on the energy factor E and the change of random number r between [0,1] to choose which roundup to use.
Soft roundup
When 0.5<|E|≤1 and r ≥0.5, the escape energy of the prey is relatively vital, and a period of roundup is needed to consume the prey energy, and then the Harris Hawks find the right time to capture, and the specific mathematical model expression is as follows:

Where:
Hard siege
When |E|<0.5 and r ≥0.5, the prey energy is low, and the Harris Hawks can quickly be successfully rounded up and surrounded by a strong attack form with the following specific mathematical model expressions:

Progressive fast swoop soft siege
When 0.5<|E|≤1 and r <0.5, the prey has the energy to escape, then the Harris Hawks flock adopts encircling siege to consume the prey’s energy and wait for an opportunity to attack, and its specific mathematical model expression is as follows:

If the prey roundup fails, the Harris Hawks flock performs a random wandering whose specific mathematical model expression is as follows:

Where: LF (D) means the D-dimensional Lévy flight function and S means the random vector on

Progressive fast swoop hard roundup
When |E|<0.5 and r <0.5, the prey energy is too low and can quickly be rounded up, at which time the Harris Hawks flock directly attacks with the following specific mathematical model expressions:

If there is a failed roundup, the random wandering is continued and refer to “(7)” is executed. The mathematical model merges the expressions as follows:

Problem analysis and improvement strategies
Chebyshev chaos mapping strategy
When HHO computationally solves the optimization problem, it takes a random way to initialize the population, which cannot guarantee the uniformity of population distribution, and the global exploration ability 30 and search accuracy of the algorithm are low, 33 and it is easy to fall into local optimum, 29 resulting in sub-optimal paths planned by the robot. Chebyshev chaotic mapping has good disorder and ergodicity, which is applied in the initial population of HHO to improve the population distribution, the algorithm’s global exploration ability and the optimization-seeking accuracy. As shown in Figure 1, the random distribution of Chebyshev chaotic mapping in the interval of [−1,1] has a good overall effect.
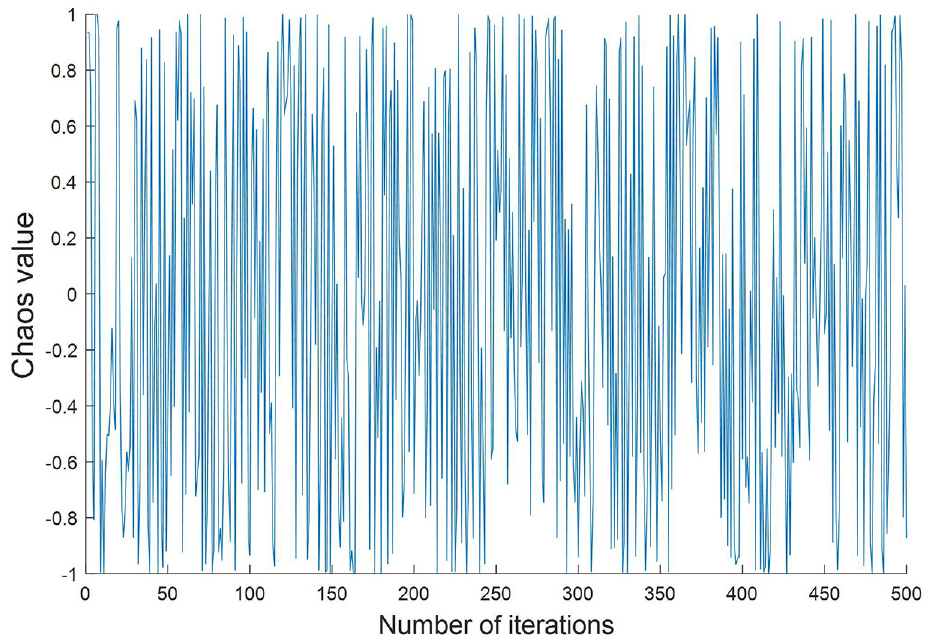
Chebyshev chaos mapping diagram.
The specific mathematical expression to apply to the initial population is as follows:

Where:
Fusion sparrow algorithm discoverer strategy
The sparrow optimization algorithm divides the population into discoverer and follower. As the food searcher in the population, the discoverer sparrow plays the role of global search of the algorithm with good global search performance while guiding the follower sparrow to explore. The exploration phase in the Harris Hawks algorithm is influenced by the random number

Where:
Improved energy factor strategy
In the HHO algorithm, the energy factor E influences the transition from the search phase to the development phase of the algorithm, and the overall trend of |E| decreases linearly from 2 to 0. The algorithm transforms from global search to local search. The linear decreasing of E leads to a poor balance between global and local search, which cannot adapt to the exploration and development of multi-complexity cases, and the generality of the algorithm is low. As shown in Figure 2, when 2≥|E|≥1, the algorithm performs the search phase, after 250 iterations, the algorithm begins to convert to the development phase until the end of the iteration, the number of global searches is equal to the number of local searches, after fusion with the sparrow algorithm, the search phase has a certain amount of bootstrap search performance enhancement, but the algorithm in search of high latitude and complex environment, due to the energy factor E linear rapid decrease, resulting in global detection is not comprehensive and fall into the local optimum.
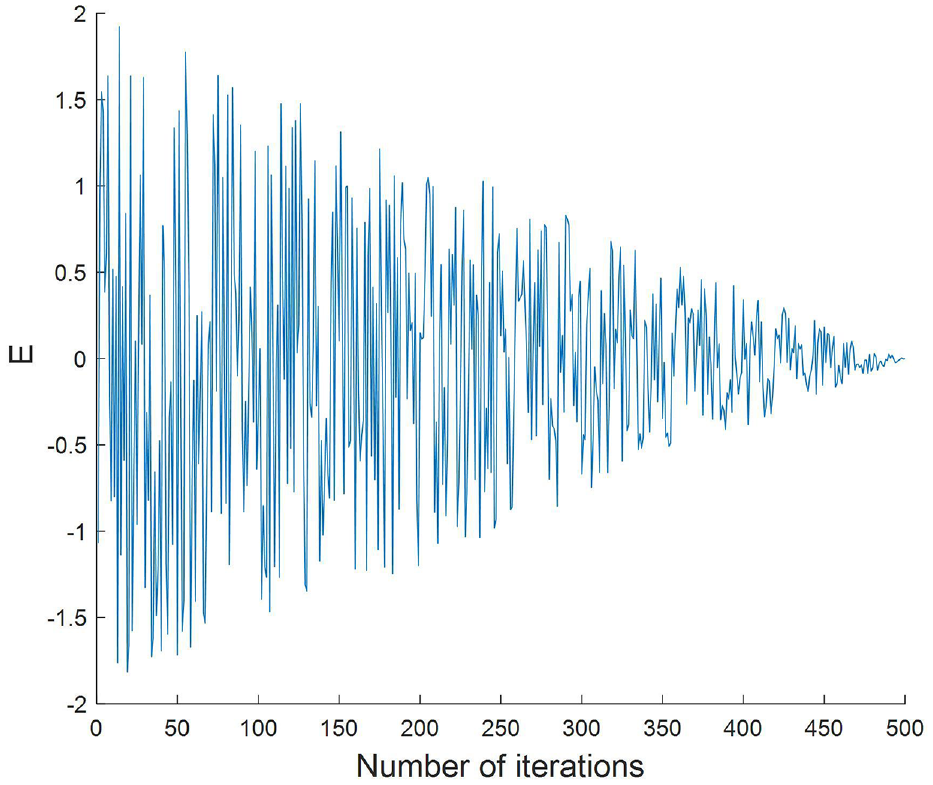
Distribution of energy factor E.
In this paper, we propose a nonlinear trend energy factor that increases the number of global explorations by slowing down the rate at which E decreases. As shown in Figure 3, the value of E drops to 1 around 330 iterations, the algorithm is converted to the development stage, and the number of global searches is improved by about 32% compared with the original energy factor E. It can better adapt to the investigation in a multi-dimensional complex environment, and the generality is enhanced to avoid falling into suboptimal values. The specific mathematical model expression of E is as follows:

Where: T means the maximum number of iterations.
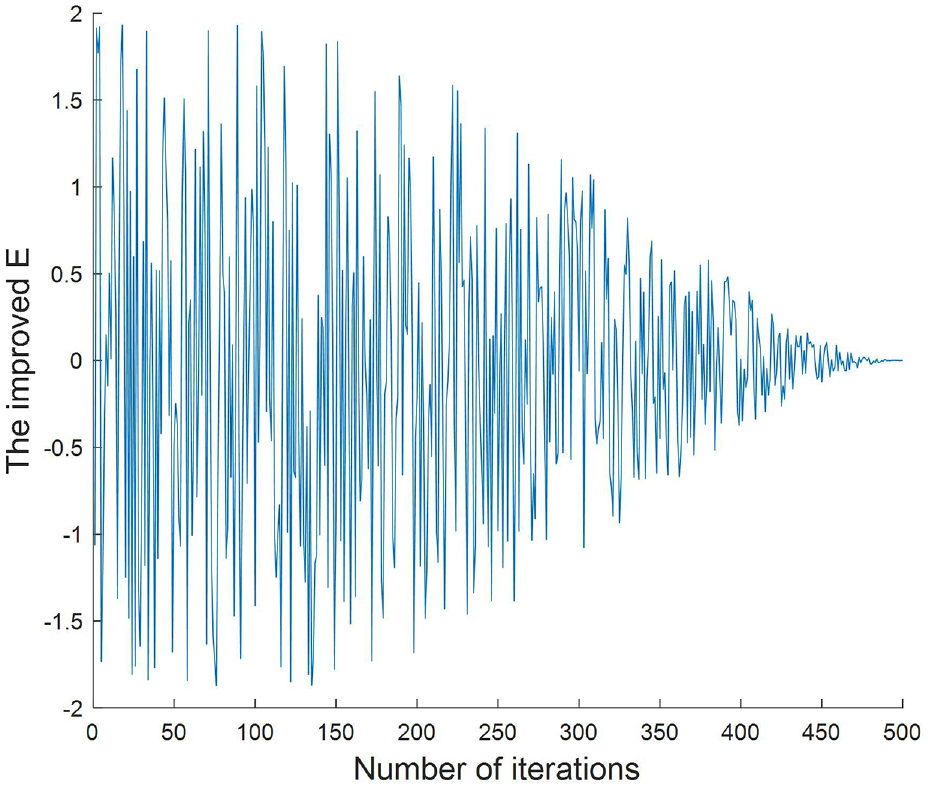
Distribution of the improved energy factor E.
Nonlinear weights to improve the Lévy flight strategy
In the local development stage of the Harris Hawks roundup, the prey energy is high, and there will be a fleeing situation when the Harris Hawks will carry out Levi’s flight of random wandering. This wandering approach increases local exploration capabilities in the early iterations of the development phase because of the extensive search range. With the late iteration of the Harris Hawks flock found the target and gathered to hunt, the effective search range gradually reduced; some Harris Hawks need to continue to adjust the state for hunting because they did not catch the prey; if they continue to perform the Lévy flight random wandering, resulting in Harris Hawks flying out of the effective search range, this wandering way will lead to a reduction in search accuracy and search efficiency, so a non-linear weighting strategy is introduced, and its specific mathematical model expression is as follows:

As shown in Figure 4, a nonlinear plot of W. In iterations 300–500 for local search, when the prey escapes, the Harris Hawks perform a random wandering of Lévy flight. As the number of iterations increases, the weighting strategy leads to smaller and smaller ranges of Lévy flights, reducing the random search range of Harris Hawks and improving the search accuracy and contraction speed.
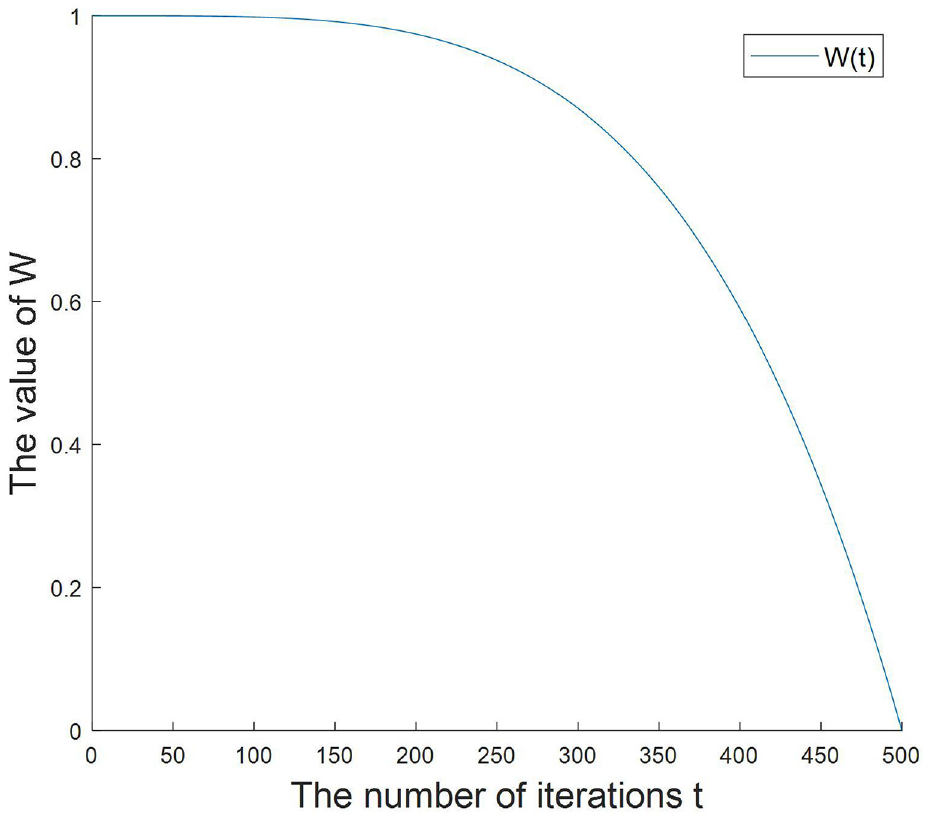
Non-linear convergence curve.
The mathematical model expression for the improved Harris Hawks random wandering is as follows:

The block diagram of MIHHO is shown in Figure 5.
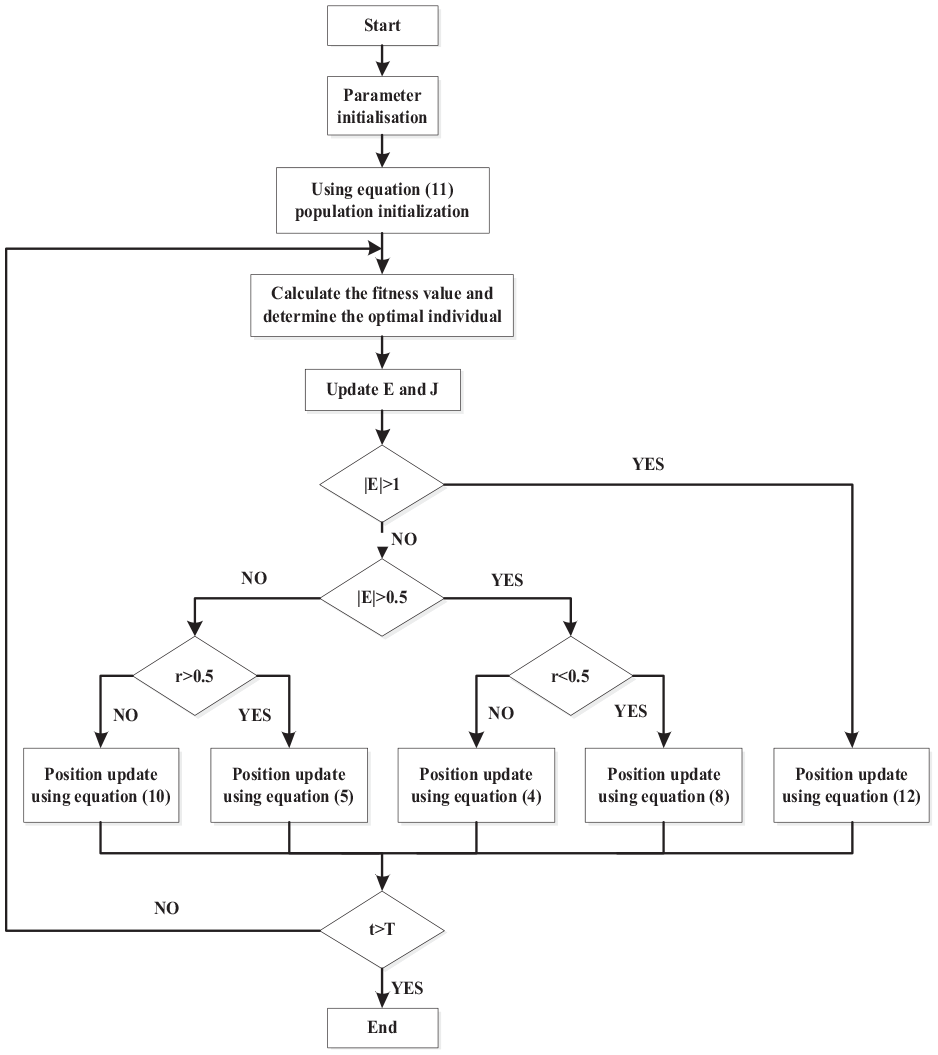
Flow chart of MIHHO algorithm.
Test function experiments and path planning experiments
Test function experiments
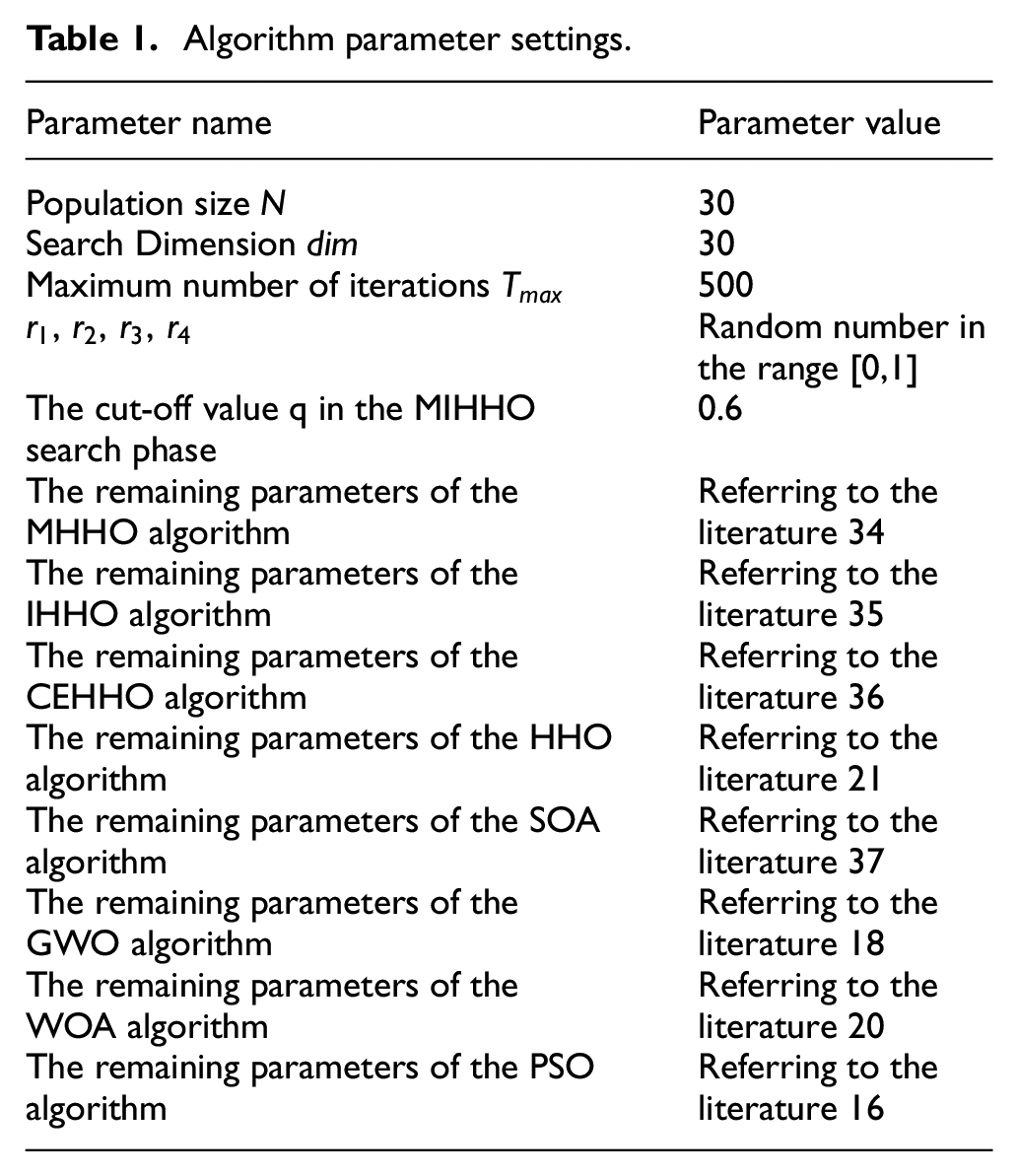
To verify the effectiveness of the MIHHO improvement, the algorithm is compared with HHO, three other improved HHOs and four other types of algorithms in eight test functions for merit-seeking experiments and three different simulation environments for path planning experiments. The various parameters of the algorithm in the simulation experiment are set as shown in Table 1.
Algorithm parameter settings.
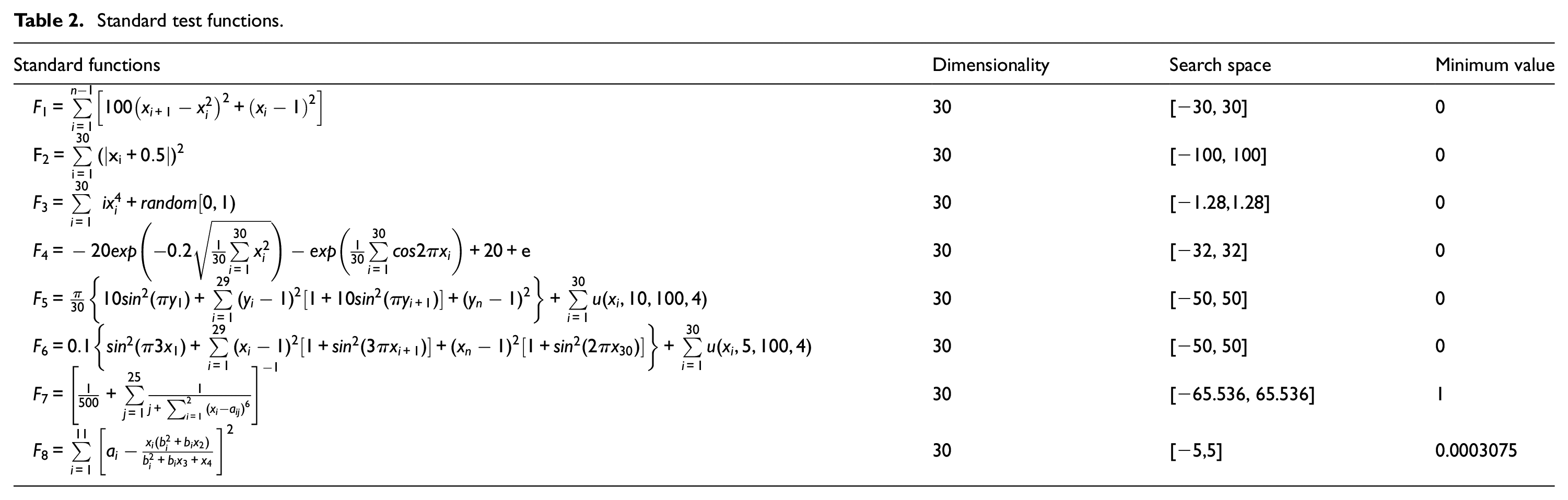
The test function has a better evaluation function for the algorithm to find the best test. The smaller the value the algorithm searches under the same conditions, the stronger the search and development performance. This paper selects eight functions in three categories of single-peak, multi-peak and fixed dimension for algorithm performance testing, as shown in Table 2.
Standard test functions.
Analysis of experimental results
The MIHHO is compared with three improved HHO algorithms, MHHO, IHHO, CEHHO, HHO and four other types of algorithms, SOA, GWO, WOA, and PSO, to do test function comparison experiments, and the specific convergence curves are shown in Figure 6. In the three single-peak test function convergence curves in Figure 6(a) to (c), MIHHO solves better fitness values compared to the original HHO and the three improved HHO algorithms, HHO performs the worst performance in its class, and the other four algorithms have a more significant gap with MIHHO overall. In (a), MIHHO performs well and explores the new minimum fitness value after 220 iterations. In (b)(c), MIHHO has a stronger search and exploitation capability and explores the minimum value with multiple orders of magnitude difference compared to other algorithms, due to the introduction of chaotic mapping into the algorithm to enhance the global exploration capability.
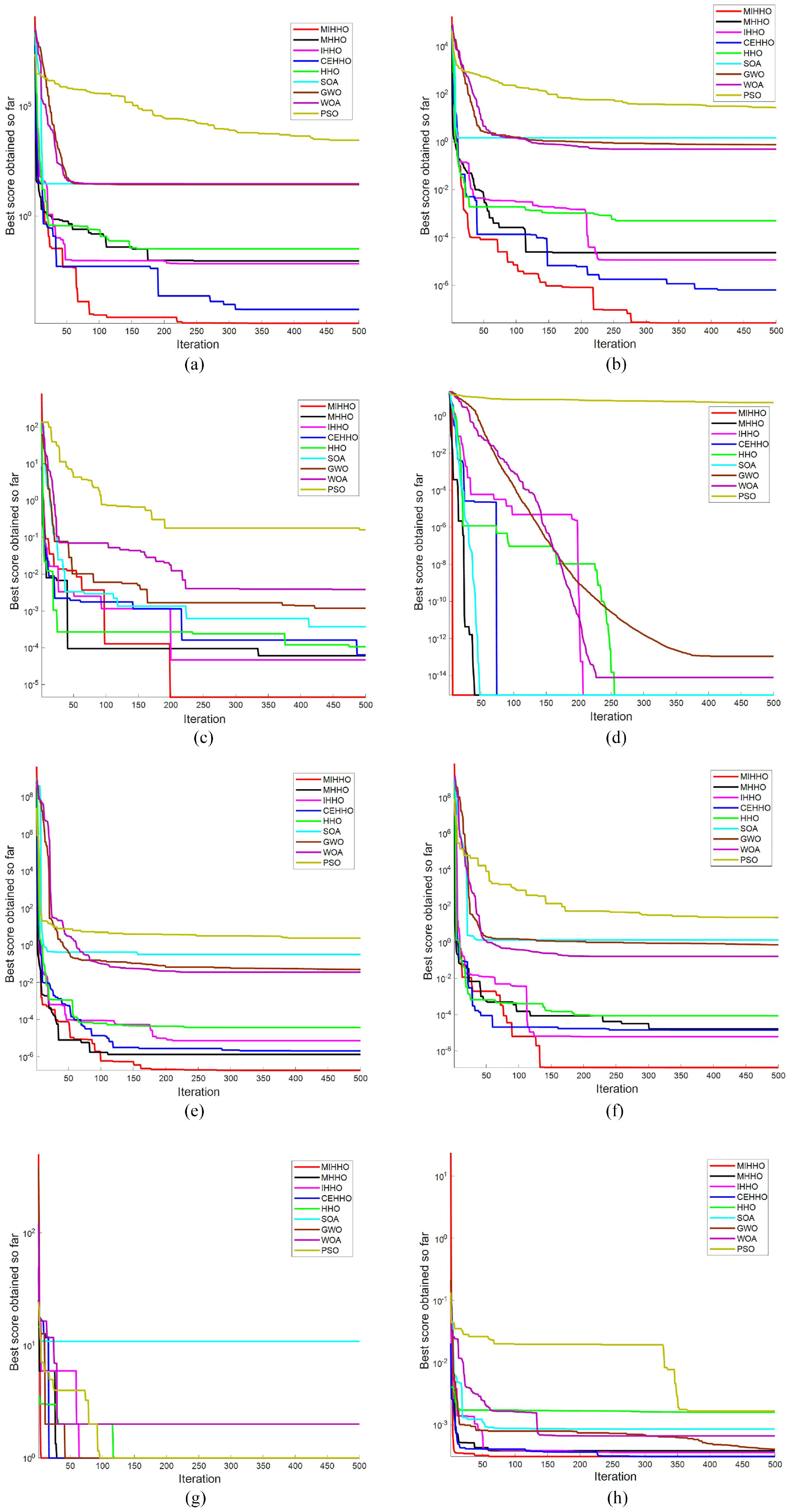
Convergence curves of 8 test functions: (a) F1 test function, (b) F2 test function, (c) F3 test function, (d) F4 test function, (e) F5 test function, (f) F6 test function, (g) F7 test function, and (h) F8 test function.
The (d), (e), and (f) multi-peak test functions in Figure 6 mainly test the algorithm’s ability to jump out of the local optimum. In the (d) test function, except for WOA, GWO, and PSO, which do not add up in performance ability, the rest of the algorithms almost search for the optimal value in the current environment, but MIHHO searches for the optimal value with fewer iterations and faster search speed. In (e) and (f) all algorithms converge and keep searching for new minimum fitness values in the first 100 iterations, but MIHHO jumps out of the local optimum and searches for smaller fitness values after 150 and 175 iterations, respectively, the sparrow algorithm discoverer strategy is introduced in MIHHO to make the algorithm more capable of searching.
(g) and (h) of Figure 6 show the fixed-dimensional multi-peak test functions. WOA and SOA perform poorly in (g), and the rest of the algorithms find the optimal value, but MIHHO searches for the optimal value after six iterations, and the search speed is faster. In (h), both MIHHO and CEHHO can search for the optimal value the GWO curve keeps converging after 500 iterations without finding the optimal value, and the searchability is weak. MIHHO finds the optimal value after 61 iterations, thanks to the introduction of nonlinear energy factor strategy and nonlinear weight strategy in MIHHO to balance the global search and local search and speed up the search speed.
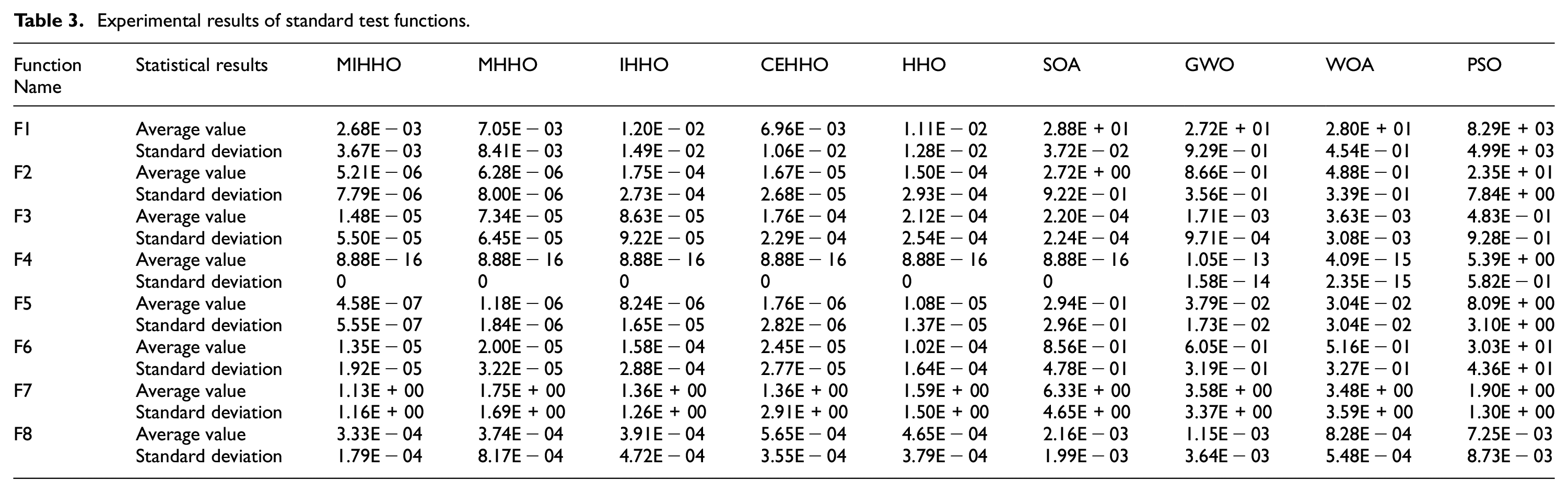
To verify the stability and robustness of the MIHHO improvement, nine algorithms were used to solve the eight test functions, and each process was run 30 times to obtain the mean and standard deviation, as shown in Table 3. The mean and standard deviation of MIHHO among the eight test functions was the most minor compared to other algorithms, and the algorithms were superior. In the F4 test function, MIHHO, MHHO, IHHO, CEHHO, HHO, and SOA all searched for the same minimum value with a standard deviation 0. However, the number of iterations in the test function is lower, and the search is faster, as shown in the (g) plot in Figure 6.
Experimental results of standard test functions.
Path planning experiments and analysis
Raster maps have good environment expression capability, and path-planning environments are often built using raster. As the raster map shown in Figure 7, set the length of each raster to 1. The white area represents the feasible environment, and the black area represents the obstacle environment. To facilitate the calculation of the path length planned by the robot, each grid is numbered in the order of top to bottom from left to right, and the ith grid position is described as (
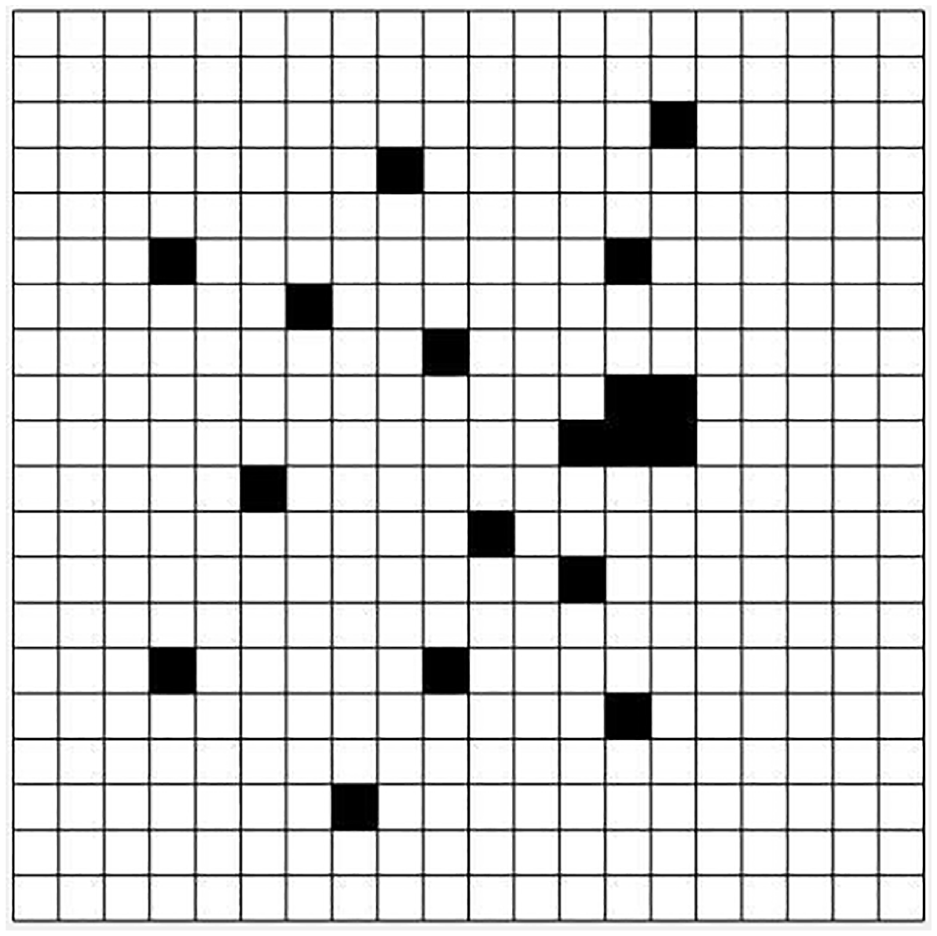
20 × 20 raster map.
Using the path length as the fitness function of the algorithm for solving the path planning problem, the robot plans the path length calculated by the following formula:

In this paper, we design three types of raster maps of 15 × 15, 20 × 20 and 40 × 40 and set obstacles of different sizes in the environment as the simulation environment for robot path planning in MATLAB 2018a, and uniformly set the top left corner of the map as the starting point and the bottom right corner as the target point.
Indoor path planning simulation experiments for the same type of algorithm
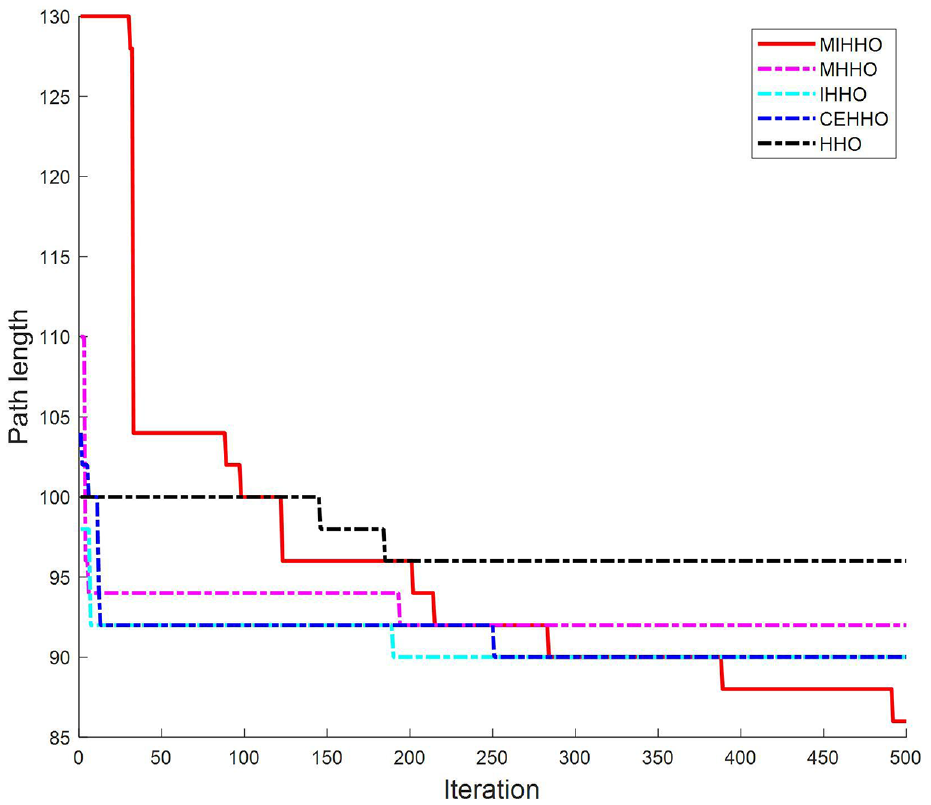
As shown in Figures 8 and 9, the path planning experiments of the same algorithm are performed in a 15 × 15 raster map, and the map complexity is low in a simple raster map. All five algorithms searched for the minimum value. Still, MIHHO required the smallest number of iterations to search for the shortest path in a simple environment and searched for the minimum value after 15 iterations, due to the increase in search efficiency by adding a dynamic weighting strategy to the algorithm.
Simple environmental path planning for 15 × 15.
Path iteration curve at 15 × 15.
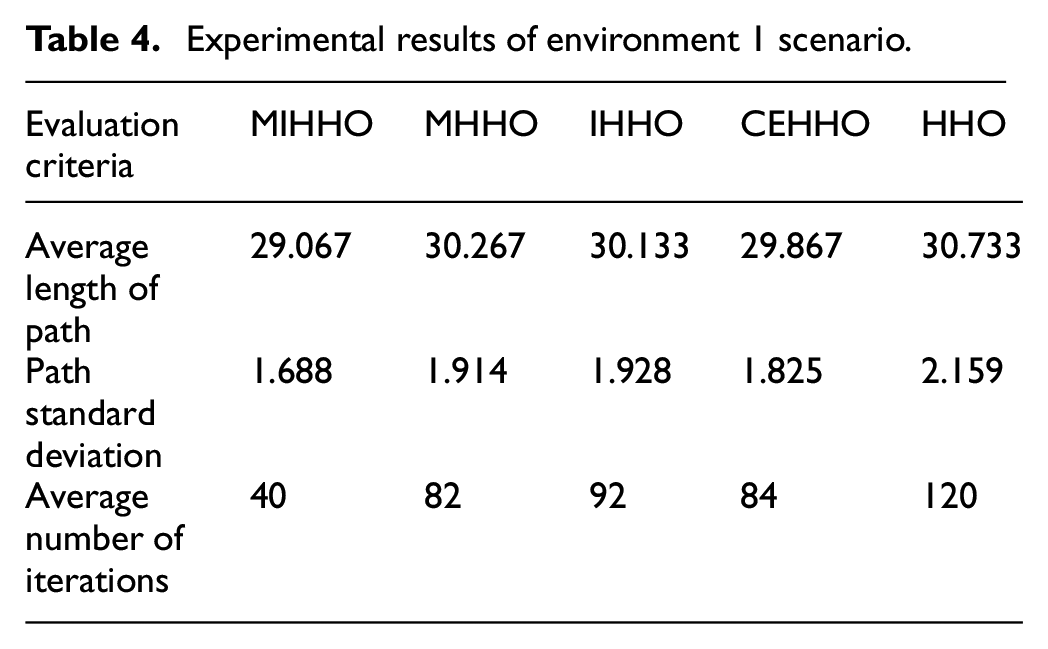
The path standard deviation and path mean of MIHHO are lower, and the algorithm is more stable. The path mean length is reduced by 3.6%, 3.7%, 2.8%, and 5.7% compared to MHHO, IHHO, CEHHO, and HHO, respectively, as shown in Table 4.
Experimental results of environment 1 scenario.
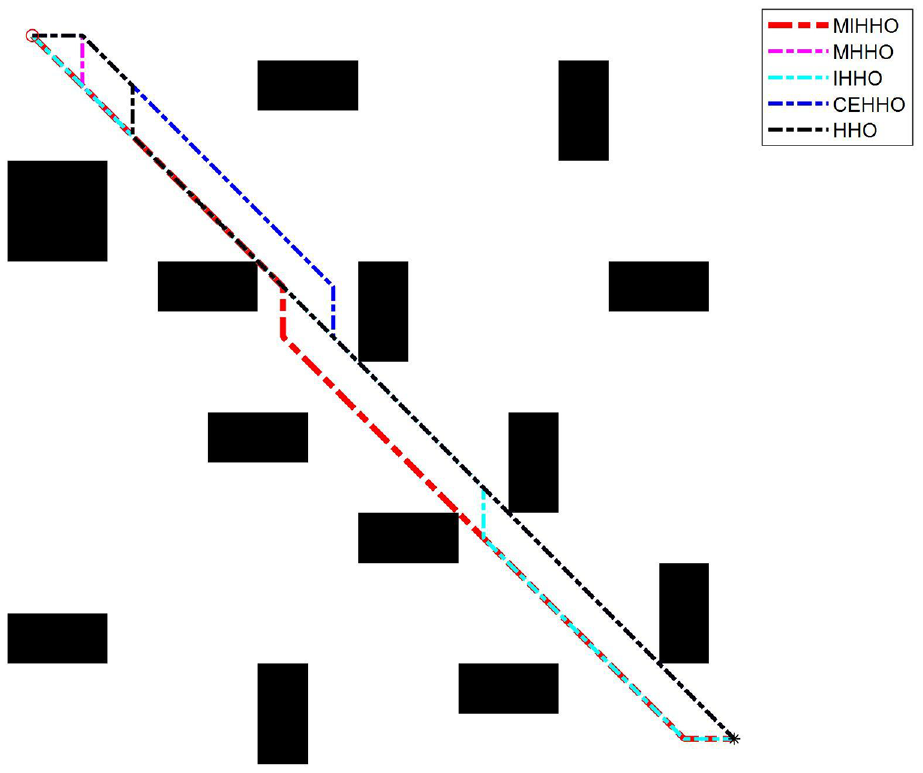
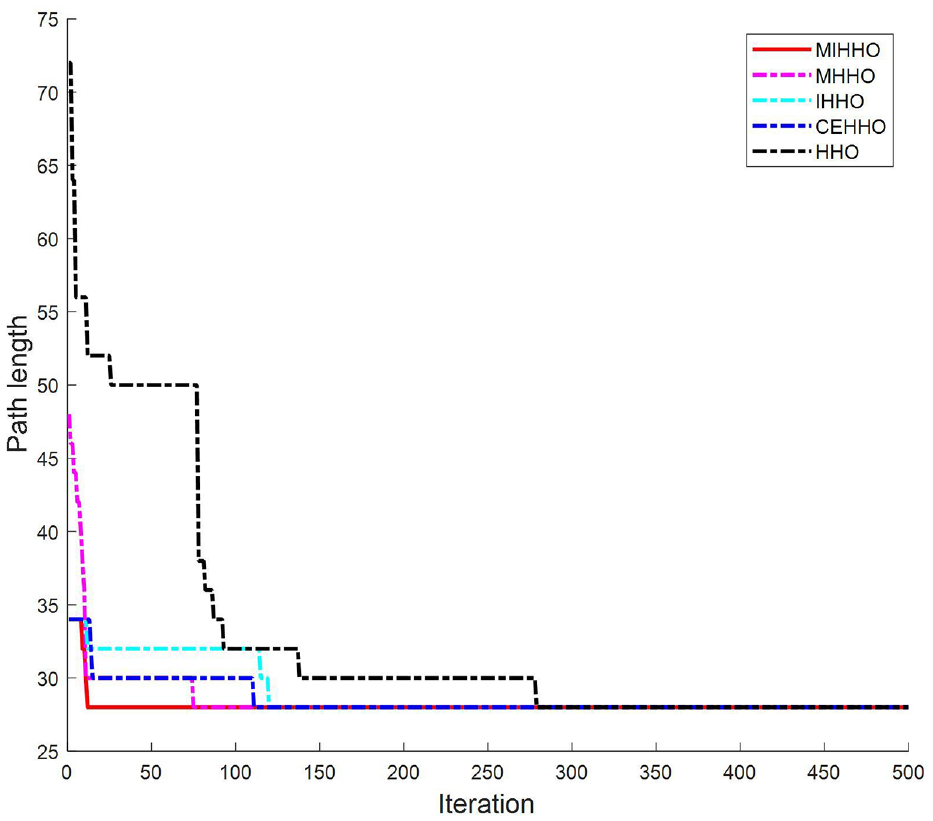
As shown in Figures 10 and 11, the path planning experiments of the same algorithm were conducted in a 20 × 20 raster map with varying obstacle sizes and medium environmental complexity for this environment. In the first few raster planned paths, IHHO, CEHHO, and HHO three algorithms appear invalid turn paths; MIHHO planned a relatively short path, the middle and late paths compared with other algorithms, there is no invalid turn, after 225 iterations to detect the new shortest path, this is because the algorithm development stage to integrate the sparrow algorithm discoverer strategy, the searchability is enhanced, the improvement of the energy factor E, so that the algorithm better search in complex environments.
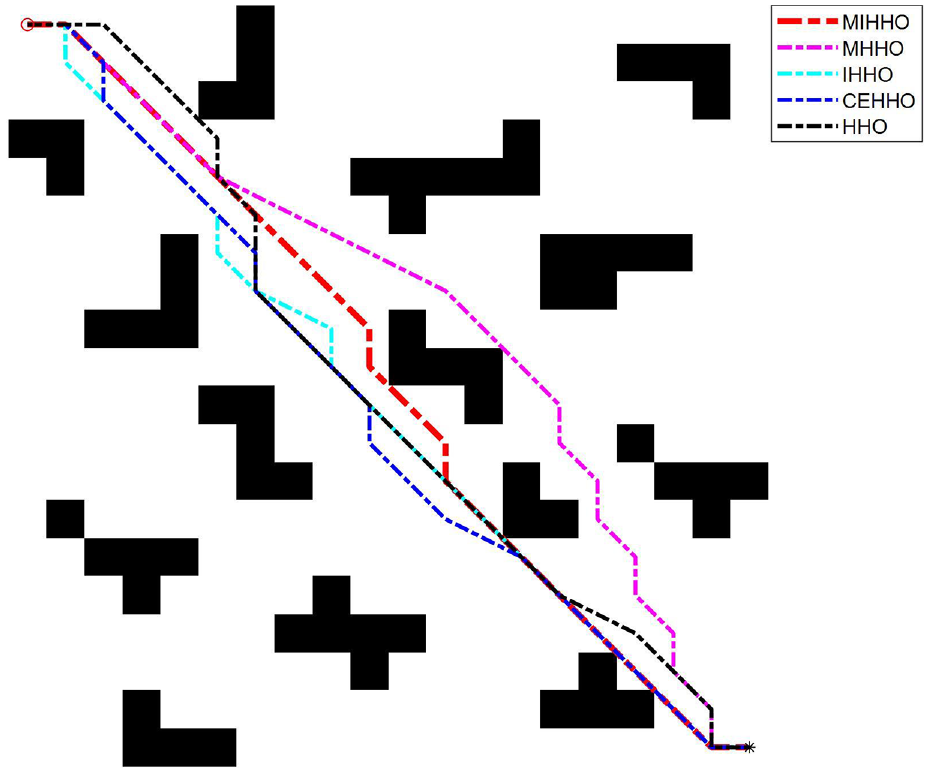
20 × 20 medium environment path planning.
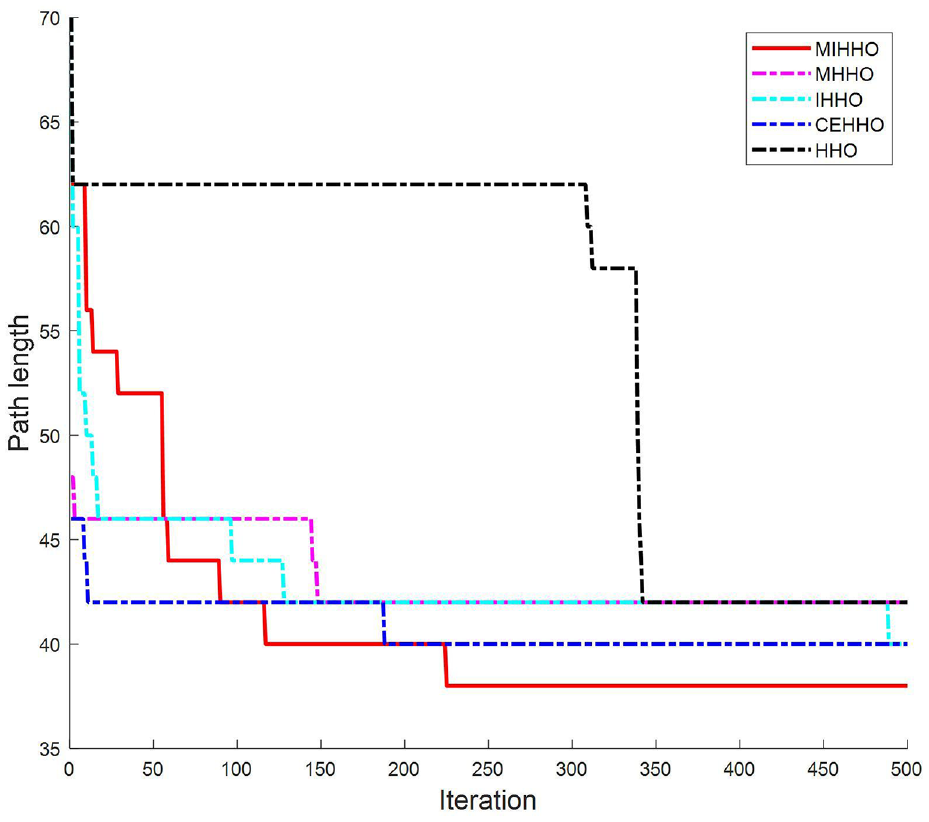
Iteration curve of the path under 20 × 20.
As shown in Table 5, MIHHO has the minimum values of path average length, path standard deviation and average number of iterations, where the path average length is reduced by 5.3%, 7.3%, 4.7%, and 9.1% compared to MHHO, IHHO, CEHHO and HHO, respectively.
Experimental results of environment 2 scenarios.

As shown in Figures 12 and 13, the path planning experiments for the same algorithm were performed in a 40 × 40 raster map, which has a larger area and more obstacles than the previous two environments. The path of MIHHO planning is smoother, and the path is shortest compared with other algorithms. At 480 iterations, the algorithm is developed again to find the new shortest path, which is due to the introduction of a dynamic weighting strategy in the algorithm to reduce the randomness of the Levy flight and increase the local search ability and search speed of the algorithm.
40 × 40 complex environment path planning.
Path iteration curve under 40 × 40.
The average path length was reduced by 9.0%, 20.0%, 20.0%, and 34.3% compared with MHHO, IHHO, CEHHO, and HHO, respectively, as shown in Table 6.
Experimental results of environment 3 scenarios.

Indoor path planning simulation experiments with different types of algorithms
To further verify the performance of MIHHO improvement, path planning comparison experiments will be conducted in different algorithms. In this paper, four algorithms with better performance in path planning, Seagull Algorithm (SOA), Gray Wolf Algorithm (GWO), Whale Algorithm (WOA) and Particle Swarm Algorithm (PSO), are used for further comparison experiments.
As shown in Figures 14 and 15, the path planning simulation experiments are performed for MIHHO with four different types of algorithms in a 15 × 15 raster environment. The three algorithms GWO, WOA and PSO can search for the shortest path in a simple environment. The number of iterations to solve the optimal path is 245, 239 and 403, respectively, which is higher in convergence and lower in exploration ability compared with MIHHO. The optimal iteration curve of SOA has been converging until the shortest path searched is 30 after 500 iterations, and the overall path planning performance is weaker compared with MIHHO.
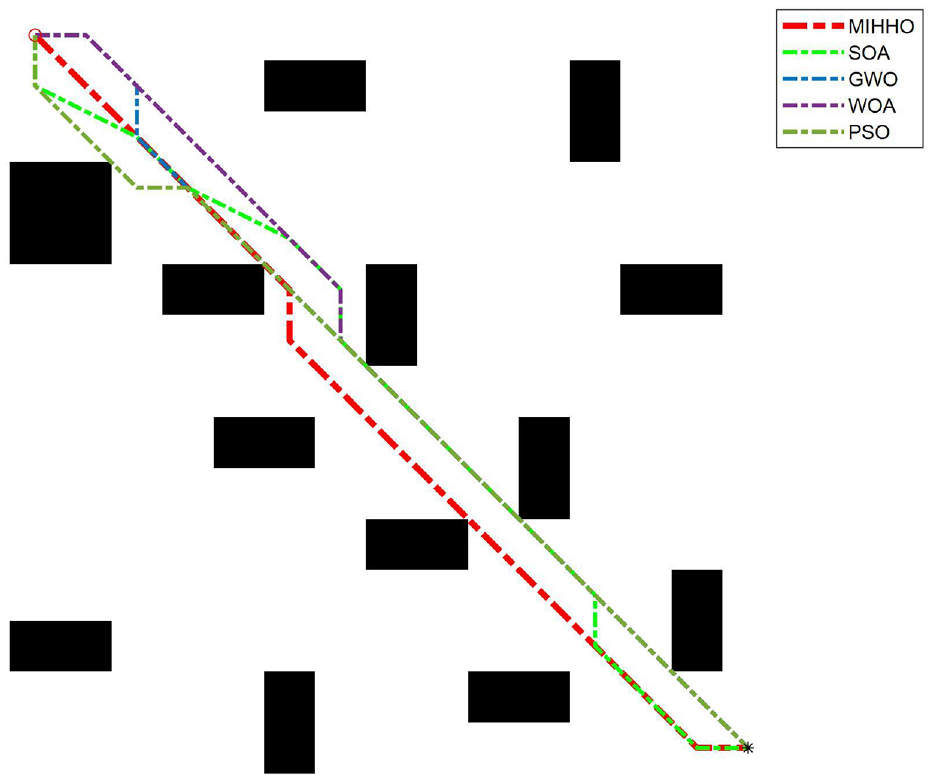
Different types of path planning for 15 × 15.
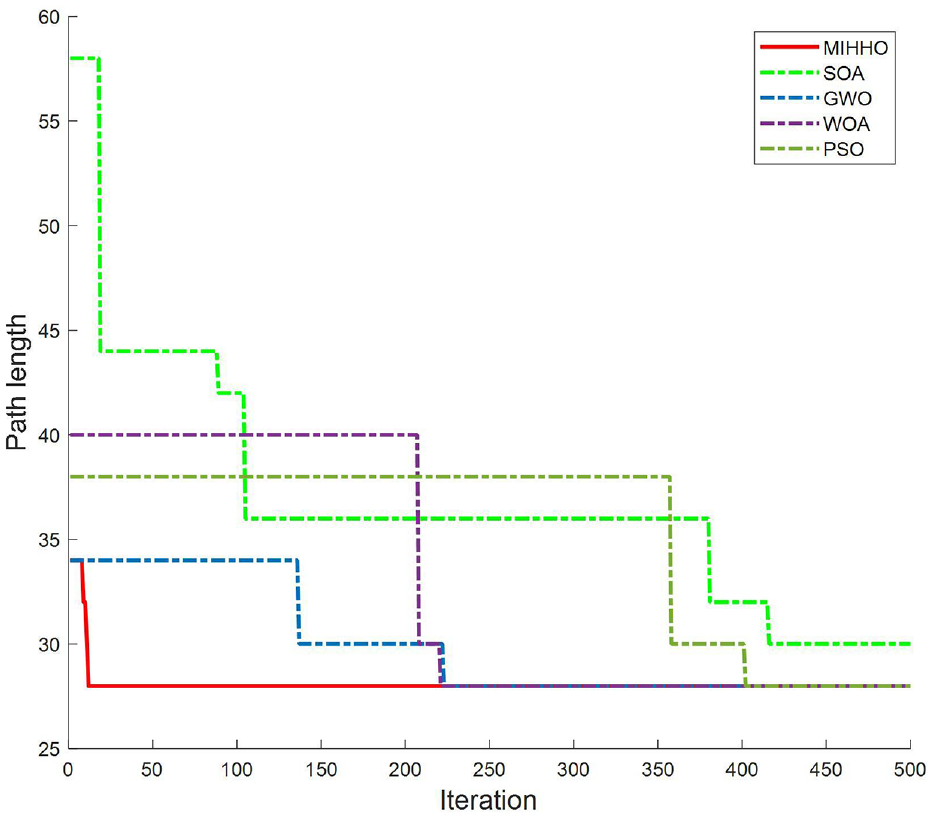
Path iteration curve under 15 × 15.
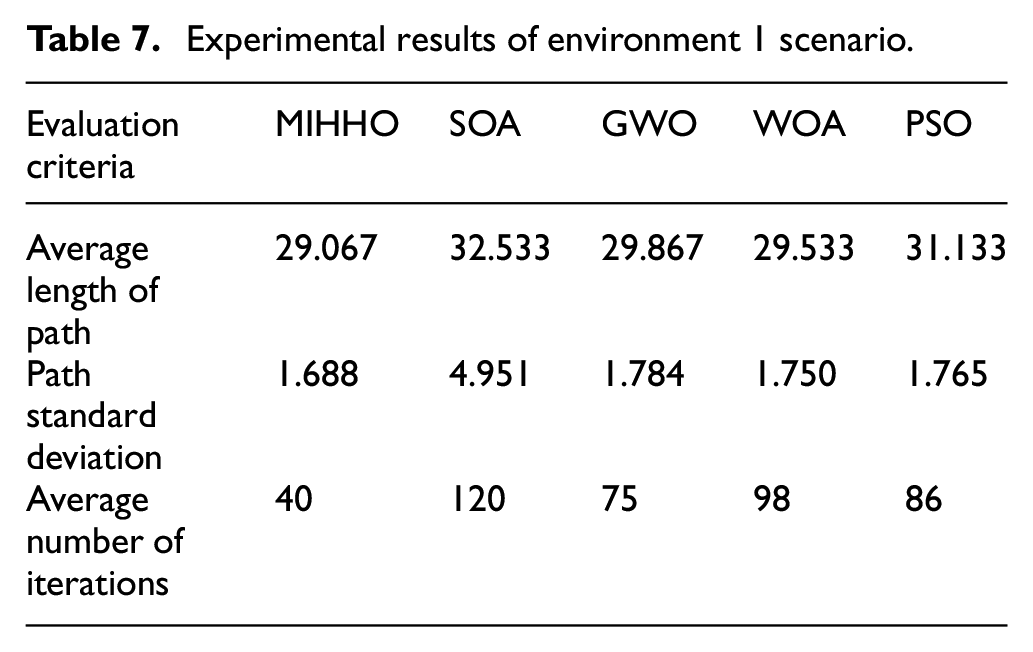
As shown in Table 7, the average length of the paths solved by SOA and PSO after 30 experiments is high, and the standard deviation of SOA paths is relatively large, and the path planning is unstable. MIHHO has the minimum value and the average number of iterations in all three metrics is significantly differs from the other four algorithms with fast convergence. The average length of paths is reduced by 11.9%, 2.8%, 1.6%, and 7.1% compared to SOA, GWO, WOA, and PSO, respectively.
Experimental results of environment 1 scenario.
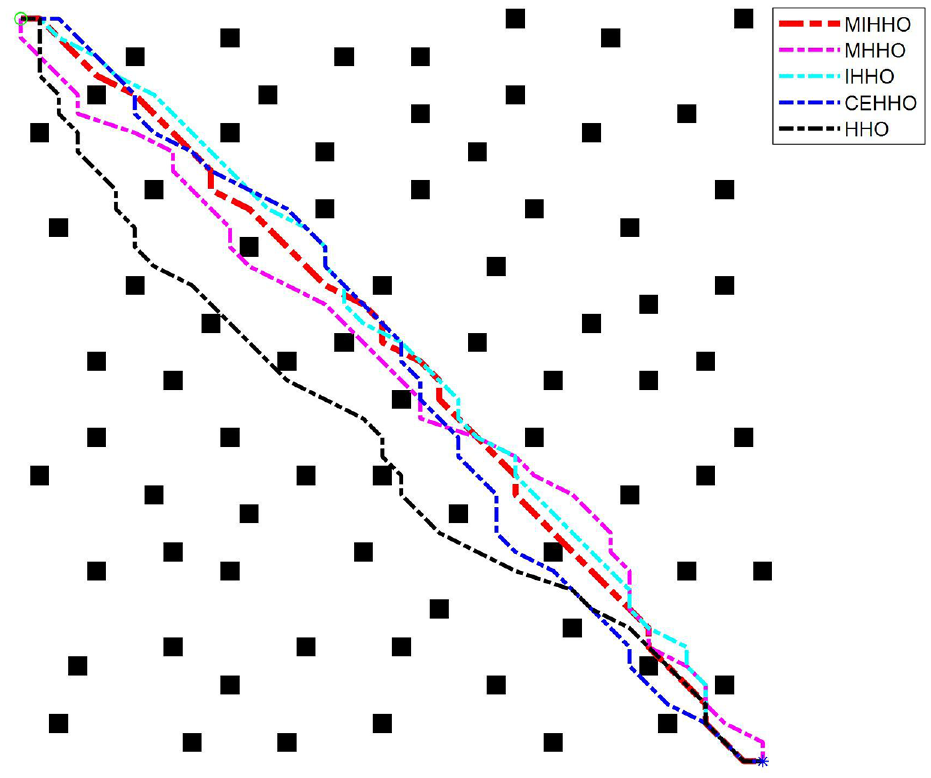
As shown in Figures 16 and 17, the path planning simulation experiments are performed for MIHHO with four different types of algorithms in a 20 × 20 raster environment. In the moderately complex environment, the paths planned by SOA and PSO are relatively poor, with an average path length close to 50 and unstable, and the intermediate courses planned 30 times by GWO and WOA are closer. Still, the path standard deviation of GWO is more extensive, and the algorithm is less stable. As the environment becomes more extensive and the complexity increases, MIHHO pulls away from the other four algorithms in the three metric experiments by an increasing margin, with the strongest overall search performance.
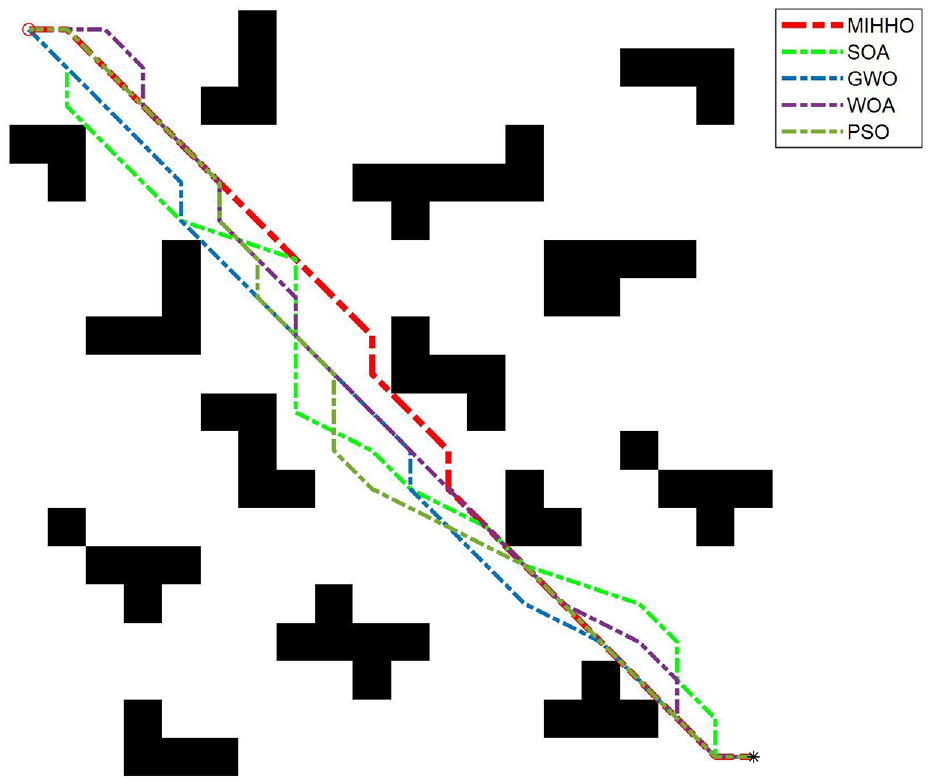
Different types of algorithmic path planning for 20 × 20.
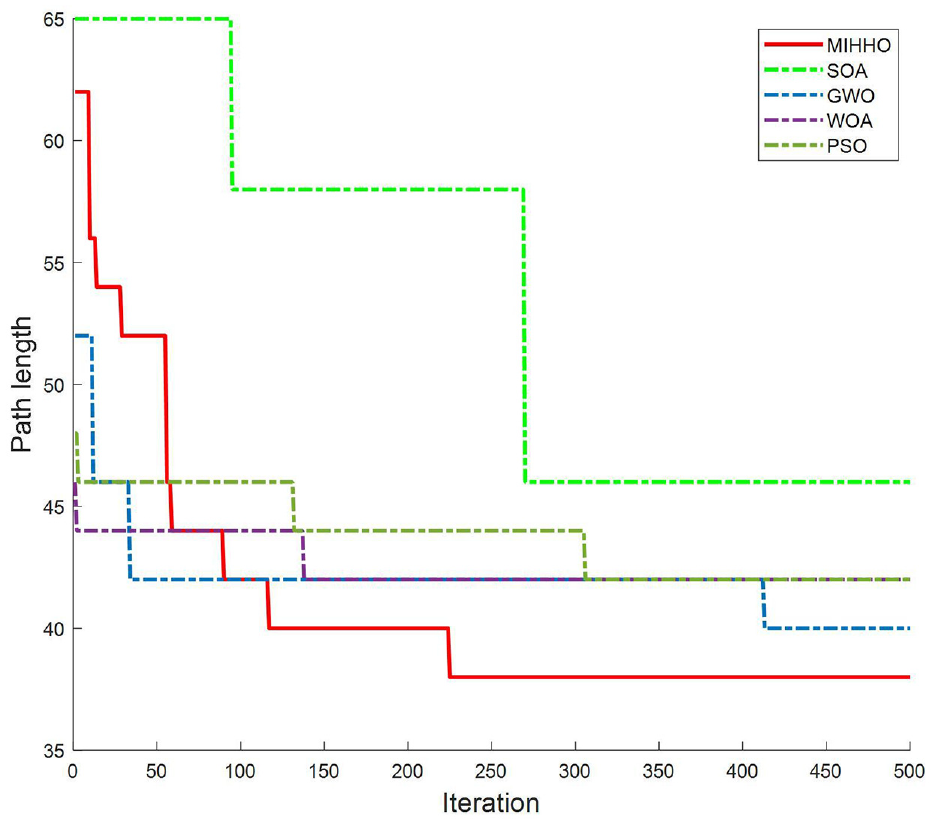
Iteration curve of the path under 20 × 20.
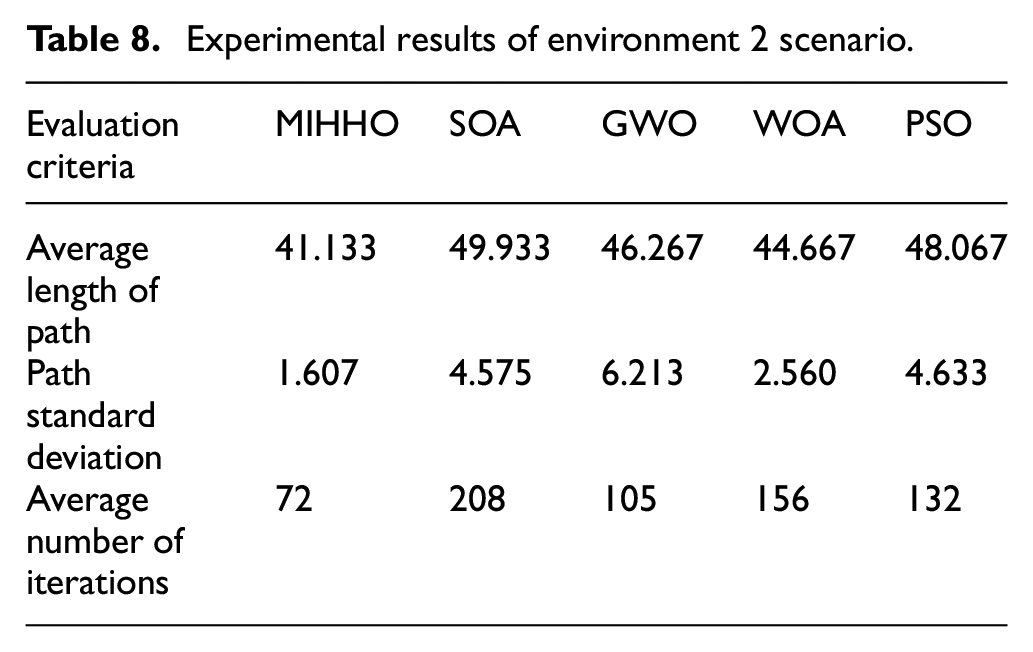
As shown in Table 8, MIHHO has the smallest value under all three metrics, reducing the average path length by 21.4%, 12%, 8.6%, and 16.9% compared to SOA, GWO, WOA and PSO, respectively.
Experimental results of environment 2 scenario.
As shown in Figures 18 and 19, the path planning simulation experiments are performed for MIHHO with four different types of algorithms in a 40 × 40 raster environment, which has high complexity and dense obstacles. Introducing Chebyshev chaos mapping and fused sparrow algorithm discoverer mechanism in MIHHO allows the algorithm to have enhanced search capability in the search phase. MIHHO develops new optimal paths after 480 iterations, jumping out of the local optimum.
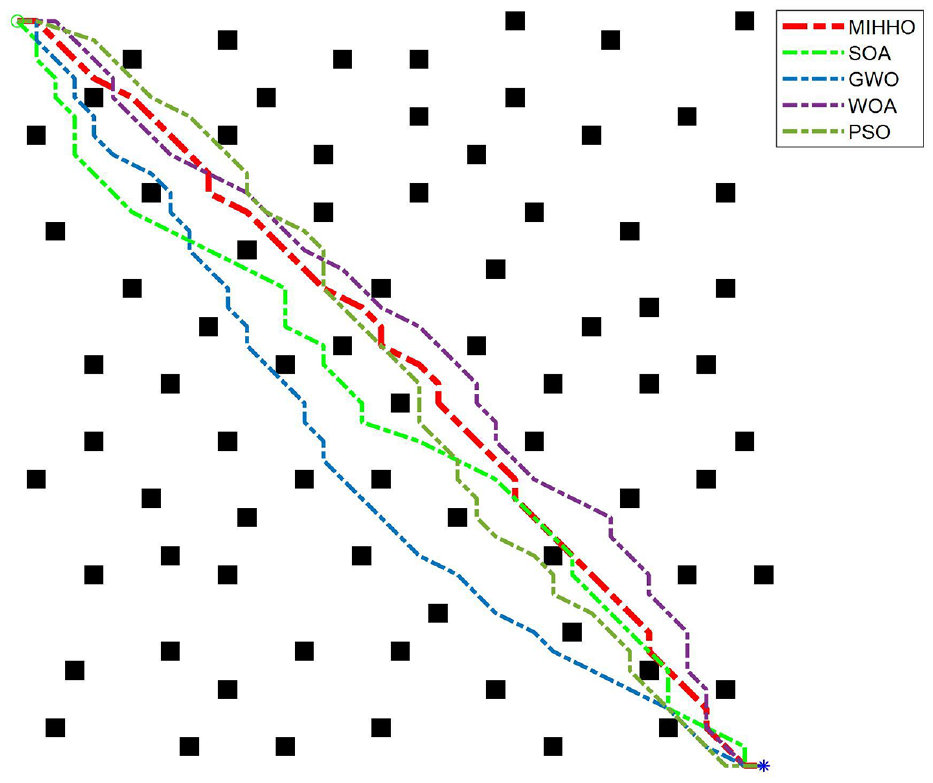
Different types of algorithmic path planning for 40 × 40.
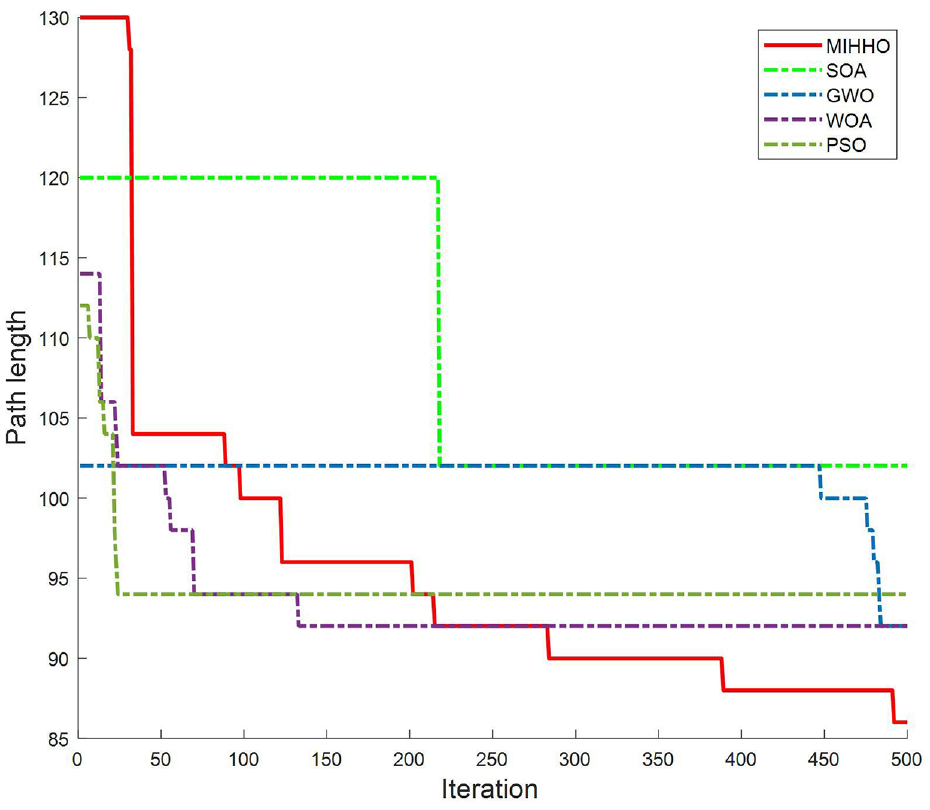
40 × 40 path iteration curve.
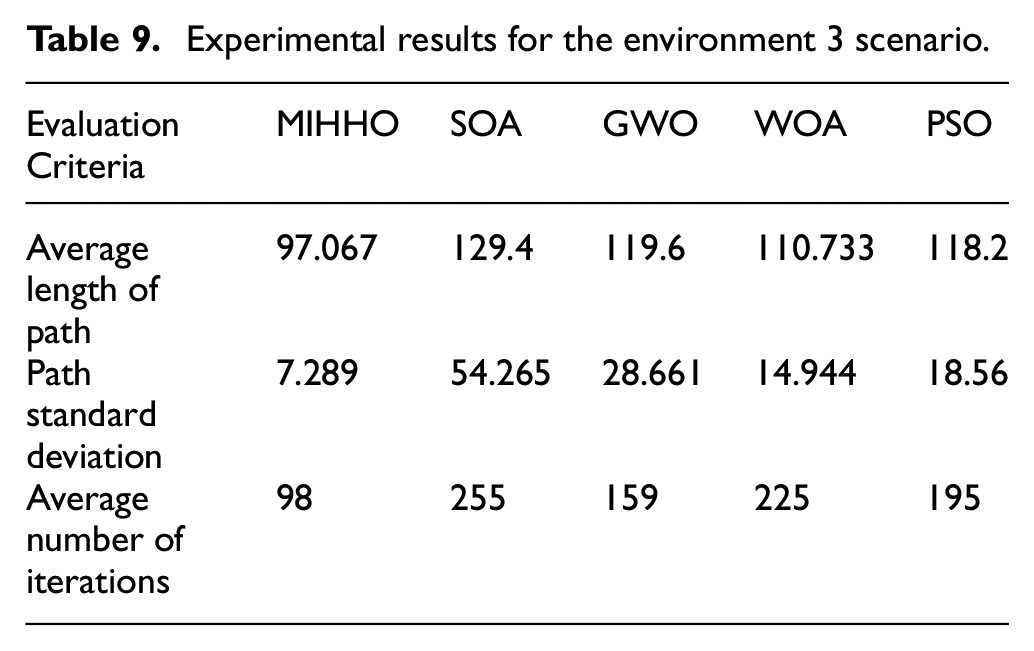
As shown in Table 9, MIHHO is the smallest value under all three metrics, with a 33.3%, 23.2%, 14.07%, and 21.8% reduction in average path length compared to SOA, GWO, WOA and PSO, respectively.
Experimental results for the environment 3 scenario.
Conclusion
Aiming at the problems of low and unstable efficiency and poor path quality in path planning for mobile robots, this paper proposes an improved Harris hawk optimization algorithm (MIHHO). The Chebyshev chaotic mapping strategy is added to the HHO to initialize the population of Harris Hawk. Integrate the exploration phase of HHO with the discoverer mechanism of the sparrow algorithm to improve the global planning ability of the robot. Improve the factor E of HHO to strengthen the balance between local and global planning of the robot and improve the path accuracy, and incorporate the dynamic adjustment of the Levy flight strategy in the development phase to improve the planning speed of the robot. Through further validation with the same type of algorithms and different types of algorithms in test functions and path planning experiments, MIHHO has improved the search efficiency, enhanced robustness, and significantly improved quality of paths in path planning. In this study, experiments are conducted in three raster maps, and further experiments in more different types of maps are subsequently needed to verify the improvement.
Footnotes
Declaration of conflicting interests
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This study was supported by the Natural Science Foundation of Xinjiang Uygur Autonomous Region (Grant No. 2021D01C052), the State Key Laboratory for Manufacturing System Engineering (Xi’an Jiaotong University) (Grant No.sklms2021010).
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.