
Abstract
The unsteady partial differential equations (UPDE) with convection term gives a clear descriptions for the solidification process of a slab in dynamic production of continuous casting. To give a suitable setting value of secondary cooling water flow rate for the dynamic control system, this study investigates an optimal control problem (OCP) of UPDE with convection term. Firstly, control vector discretization of OCP and the solution of UPDE are given. Secondly, due to the rapidity for gradient, this paper analyzes the expression of the gradient calculation method based on Hamiltonian function costate system by approximate treatment, matrix calculation and composite trapezoidal integral method. Thirdly, an improved three-term spectrum conjugate gradient algorithm (ITSCGA) is proposed to solve the OCP of UPDE, and the global convergence of the ITSCGA is demonstrated. Lastly, the performance of ITSCGA is demonstrated by experimental simulations. The results demonstrate that the ITSCGA provides a smaller temperature fluctuations, and improves the quality of a slab.
Keywords
Introduction
Partial differential equations (PDEs) are widely applied in many fields, such as physics, chemistry, biology, medicine, and so on, and it is encouraged to solve the mathematical problems in economics, finance, image processing, and other fields. Especially in metallurgy, the solidification heat transfer model can be used to represent the cooling process of a slab. Most secondary cooling water control systems1–4 of continuous casting explore this PDE model to adjust the water flow rate setting value. Therefore, the study of optimization problem based on the solidification heat transfer model of a slab is crucial for the secondary cooling systems of continuous casting process. Partial scholars5–10 based on the unsteady heat transfer model of a slab study the optimization method for the water flow rate setting value in the static production of continuous casting. However, in actual production, some dynamic situations of continuous casting often occur due to the early or tardy arrival of a ladle and the change of superheat, which can lead to adjustments in casting speed. Therefore, an unsteady heat transfer model with convection term (UHTMCT) of a slab attracts the attention of some scholars to deal with the dynamic situations. Based on the UHTMCT of a slab, Yu et al. 11 optimizes the water flow rate setting value in dynamic environment. Hardin et al. 12 proposes a dynamic spray cooling control model, and applies them to determine the optimal amount of water volume at each cooling zone. Wang et al. 13 introduces an open-loop dynamic spray cooling control strategy, which uses a control algorithm to track the casting speed and temperature of each slice.
In the view of above researches, our previous works 14 study the nonlinear model predictive control (MPC) of the water flow rate setting value based on the UHTMCT of a slab. According to Canto and Banga 15 and Ping et al., 16 optimal control can be an effective method to obtain the control trajectory for nonlinear MPC implementation. Due to the large computation in NMPC applications, it is very essential to develop more efficient solvers for the nonlinear MPC of UHTMCT. Therefore, optimal control problem (OCP) of UHTMCT and an efficient solution method are investigated in this paper. The optimization efficiency is an important work to solve the OCP, thus a highly efficient parameterization optimal method and an improved three-term spectrum conjugate gradient algorithm (ITSCGA) are presented as a prominent solver. Furthermore, for the parameterization optimal method, in order to reduce the computational expense of gradients, the gradient of OCP for UHTMCT is analyzed based on a Hamiltonian costate system by the approximate treatments of numerical integration strategy.
Optimization problem of boundary conditions of PDEs
OCP of UHTMCT17,18 in continuous casting belongs to the optimization of boundary conditions of PDEs. At present, optimization problems of boundary conditions of PDEs are divided into two categories: (1) Boundary condition identification problem of PDEs. At present, boundary condition identification problems of PDEs have been applied in many fields.19–22 Duda et al.23,24 solve the transient heat conduction equation based on the control volume finite element method and the control volume method, and estimate an unknown boundary condition through the transient temperature distribution. Sun et al.
25
use the sequential quadratic programming algorithm as an optimization technique to determine the surface heat flux of the billet. Huang et al.
26
estimate the time-varying heat flux on the chip boundary, based on three-dimensional unsteady PDE by using the inverse method; Ruan et al.
27
develop a stochastic particle swarm optimization method to determine the heat transfer coefficient in the continuous casting process. Torrijos et al.
28
study the inverse heat problem for transient heat conduction equation of the heat flux on the unknown surface of the molten salt loop. (2) The optimal control problem of boundary conditions of PDEs. To solve this problem, scholars have carried out many research works and proposed various optimal control algorithms.29–32 Gavrikov et al.
33
study the optimal boundary control problem with linear quadratic cost function in the heat transfer process of a cylinder; Mechelli and Volkwein
34
study an optimal boundary and bilateral control problem of heat transfer equation with convection term; Dekhkonov
35
recently studies the boundary control problem, based on the heat transfer model, for the heat exchange process; Bollo et al.
36
solve OCPs of Neumann boundary for a
The algorithms for solving the optimization problem of boundary conditions of PDEs are mainly divided into two categories. (1) Stochastic algorithms. The stochastic algorithms38,39 have the random search’s global optimization characteristic, but the disadvantages of these methods are slow convergence speed and high computational cost. (2) Gradient algorithm. There are a number of efficient numerical methods based on the gradient, such as Newton method, 40 alternating direction multiplier method, 41 and conjugate gradient algorithm (CGA). For the Newton method, 40 we have done the study on this method, which needs to calculate the second derivative of objective function, which is difficult to calculate when applied to our problem. Therefore, Newton method 40 is not suitable to this paper’s problem. For the alternating direction multiplier method, we only find one literature, 41 which uses the alternating direction method of multipliers (ADMM) to solve the optimal control model constrained by one-dimensional partial differential equation. In Dawodu, 41 the PDE does not include the convection term, and this PDE can be discretized into a derived discrete convex optimization form amenable to the ADMM with the help of Crank-Nicolson and Composite Simpson’s methods. However, the problem in our paper contains convection term, and has a higher dimension PDE, which leads to difficult to transform the original problem into the convex optimization form amenable to the ADMM. Furthermore, at present, much literature develop CGA to solve the OCP 16 and optimization problem of PDE.42–51 Zhou et al. 42 estimate the temperature and heat flux on inaccessible surfaces by using the conjugate gradient method with temperature and heat flux measured on back surface. Yang et al. 43 propose a modified conjugate gradient method to identify the physical parameters of transient heat conduction problems in aerospace engineering. Wang et al.44,45 propose an improved CGA to solve the OCP based on one-dimensional and two-dimensional parabolic PDEs; Razzaghi et al. 46 adopts an improved CGA to minimize cost function in the unsteady heat transfer model. They solve accurately an optimization problem by using CGA. Other notable surveys in this field can be found in Refs.47–49. In view of the above research findings, our previous works50,51 combine the regularization method with the improved conjugate gradient algorithm to identify the boundary condition of the heat transfer model. Based on the above reasons, we select the CGA to solve OCP of PDE, and develop an improved three-term spectrum conjugate gradient algorithm (ITSCGA).
Motivation and innovation
Based on the above analysis, few literature study the OCP of UHTMCT in continuous casting. Therefore, in the view of above valuable optimal control methods of unsteady PDE, this paper investigates the OCP of UHTMCT, and presents a parameterization optimal method that combines gradient analysis based on a Hamiltonian function costate system and an ITSCGA. Due to the rapidity for gradient, the control vectors of the OCP are discretized in time and space, and the expression of the gradient calculation method based on the Hamiltonian function costate system is analyzed. Then, an ITSCGA is proposed to solve the OCP of UHTMCT. Meanwhile, the global convergence of ITSCGA is demonstrated. The following are the main contributions of this study:
An OCP of the UHTMCT is investigated.
The gradient of OCP for UHTMCT is analyzed based on a Hamiltonian costate system by approximate treatment, matrix calculation, and composite trapezoidal integral method.
An ITSCGA is proposed in this paper, and the global convergence of ITSCGA is analyzed.
The structure of this paper is as follows: in Section “The solution of dynamic PDE and control vector discretization,” the parameterization of the control vector and the solution of dynamic PDE are described; in Section “The analysis of gradient calculation,” we give the strategy of fast gradient calculation; in Section “Improved three-term spectrum conjugate gradient algorithm and its global convergence,” the ITSCGA is proposed, and the global convergence of the ITSCGA is analyzed; Section “Experiment simulation” verifies the performance of the ITSCGA by experimental simulations.
The solution of dynamic PDE and control vector discretization
The optimal control model for unsteady PDE with convective term is described as follows:
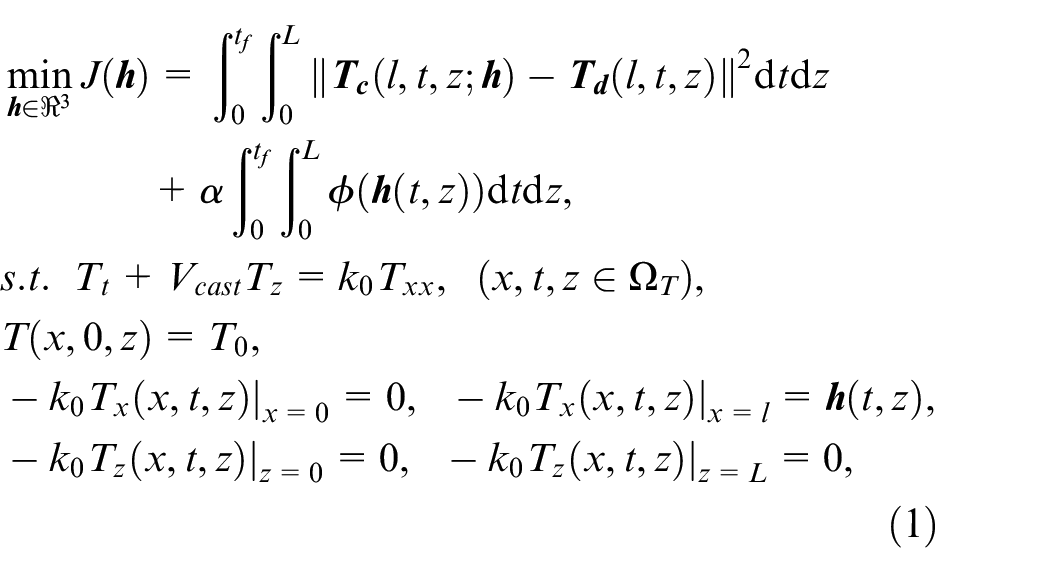
where
The solution of dynamic PDEs
Equation (1) contains an UHTMCT that can be used to describe the solidification process of continuous casting. As shown in Figure 1, to solve this UHTMCT, this paper considers a life cycle model method (LCMM).
8
In the LCMM, the first slice is generated when continuous casting begins. The first slice moves

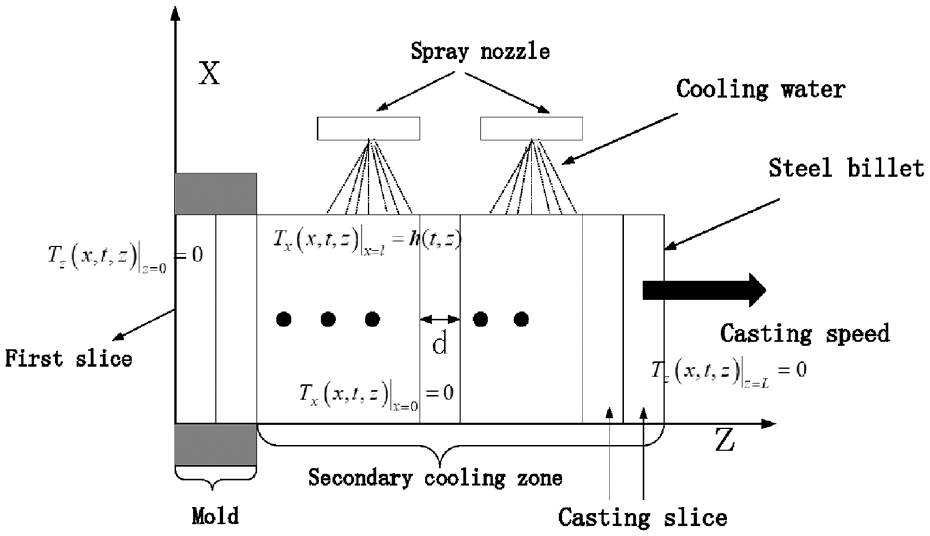
The solidification process and life cycle model method of the cast billet.
We solve the equation (2) by using the finite difference method, which is shown in the following:

where
By organizing the equation (3), we can obtain

where
The boundary condition can be written as:

where
So we can get the upper boundary:
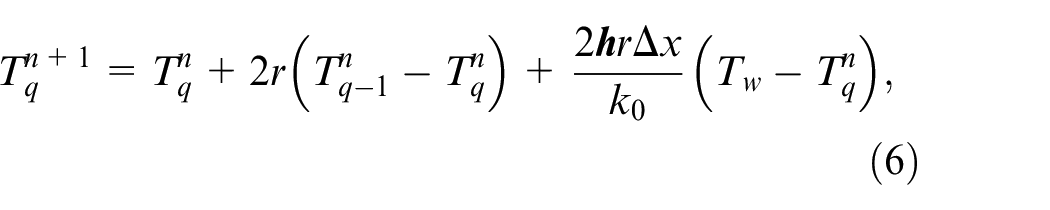
and the lower boundary:
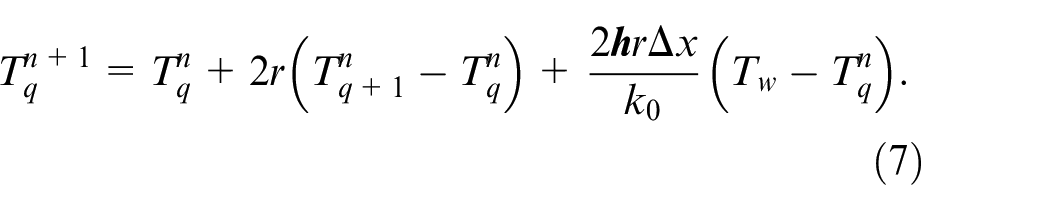
The equations (2) to (7) are given to solve one slice model. Furthermore, the thermal convection term
Control vector discretization
According to equation (1), we can obtain the cost function of the OCP as follow:
In the following, the specific discretized process of the control vector


Secondly, the piecewise constant

where
Thirdly, by using the matrix calculation, the control vector



⋮

Generally, the control vector in a dynamic system satisfies the relation
So we can obtain

where
According to Lin et al.,
52
it has proved that the state trajectory can be calculated precisely. According to the equation (16), we can find that
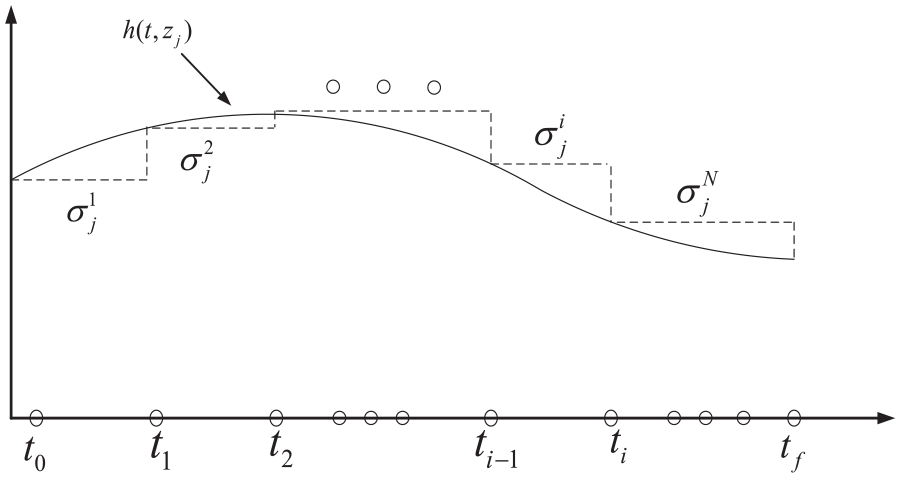
Control vector discretization approximation diagram.
Therefore, the equation (1) can be approximately converted into an OCP as follows:
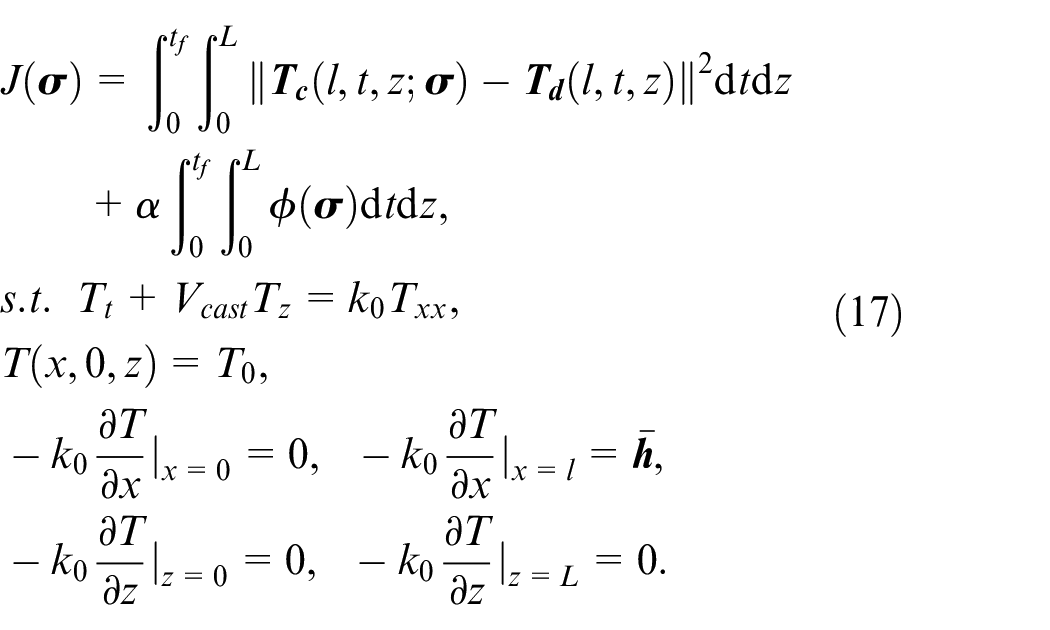
Based on the Loxton and Lin, 53 it is easy to conclude that the formula (17) converges to formula (1), so the proof process is not detailed description here.
The analysis of gradient calculation
By analyzing the equation (17), it can be seen that
The Hamiltonian function of the cost function is defined as follow:
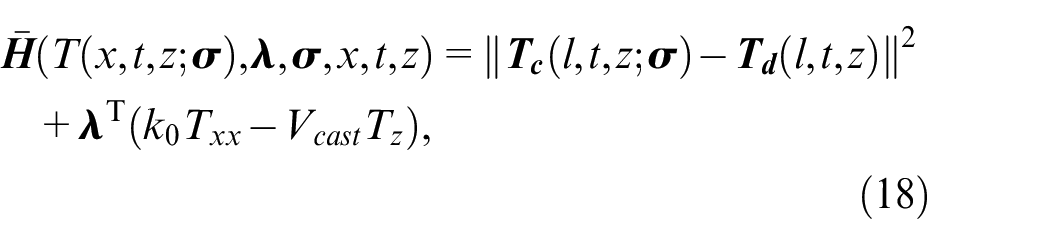
where
Where
Theorem 3.1. If the Hamiltonian function is defined by equation (18), the costate system is generated by equation (19). The gradient formulate of
Proof. Assuming
Applied the integration by parts,
So the following equation can be obtained:
where
Taking the derivative of the formula (23) with respect to
Because
Therefore, Theorem 3.1 is proved.
In order to deal with the integral term in equation (25), an approximate treatment and composite trapezoidal integral method is used. So equation (25) can be approximated by the following equation:
According to the compound gradient quadrature formula, we can obtain
where
where
Meanwhile, the time is divided into

Due to the following inequality,
we can obtain

The remainder term

Proper selection of H can effectively reduce its influence on the accuracy of gradient calculation. 16 On the basis of this, the impact of fast gradient calculation on optimization stability is also Insignificant.
Improved three-term spectrum conjugate gradient algorithm and its global convergence
In some famous CGAs, the choice of conjugate parameters has different influences on the optimal control problem, such as Polak-Ribiere-Polyak (PRP),
54
Fletcher-Reeves (FR) method,
55
and Dai-Yuan (DY).
56
According to Andrei,
57
the
Therefore, CGA is a powerful technique for solving linear optimization problems, it is employed to deal with the OCP (17). However, the cost function in this paper contains control variable boundary constraints, which cannot be solved by restricted CGA directly. Therefore, this paper applies a trigonometric conversion function method to transform the original OCP into an unconstrained optimization problem. The temporary variable

Because of
Improved three-term spectrum conjugate gradient algorithm
In this section, we present an ITSCGA based on DY algorithm. An appropriate spectrum

where

where


where
According to Li et al., 60 we can obtain

where

Letting

Making use of the Quasi-Newton equation

Therefore, we can obtain spectral parameter

However, the optimization of OCP (17) by the ITSCGA is divergent. Therefore, we define

A suitable value
The solving process of the ITSCGA for OCP (17) are as follows:
Step 1: Set
Step 2: Use the LCMM to calculate the temperature
Step 3: Use equations (27) and (36) to calculate the gradient
Step 4: Calculate spectrum
Step 5: Update the variable
Step 6: Use equation (34) to calculate the cost function
Step 7: Set
The above steps are applicable to the optimization process when the convective term
The global convergence of improved three-term spectrum conjugate gradient algorithm
In this section, global convergence of the ITSCGA under the Wolfe search criteria 16 :


where
Theorem 4.1. If sequence

Proof. Induction can be used to demonstrate the conclusion. Since
Case 1: If

and

According to equations (48) and (50), we have
Due to
Case 2: If
Due to
Case 3: If

and

so we can obtain the following inequality:
Due to
According to equations (51), (52) and (55), we can obtain
Theorem 4.1 is proved.
Remark: In our experiments, we conduct extensive testing and debugging on parameter
Theorem 4.2. Based on the strong Wolfe line search, 16 we have the following result,

Proof. We suppose that equation (56) is not true, so there exist constants

So we have
where
Using
Furthermore, we can obtain

Based on Wolfe line search criteria and Lipschitz continuous, 19 we have

and

Where
where
Hence we can obtain the following equation
So we have

Obviously, equation (61) is contradict to equation (66), so we can obtain
Theorem 4.2 is proved.
Experiment simulation
We carry out the static and dynamic simulation experiments in this section. In the static situation, the simulation experiments are divided into three situations. In case 1, the parameters
Static experiment simulation
This section considers the convective term
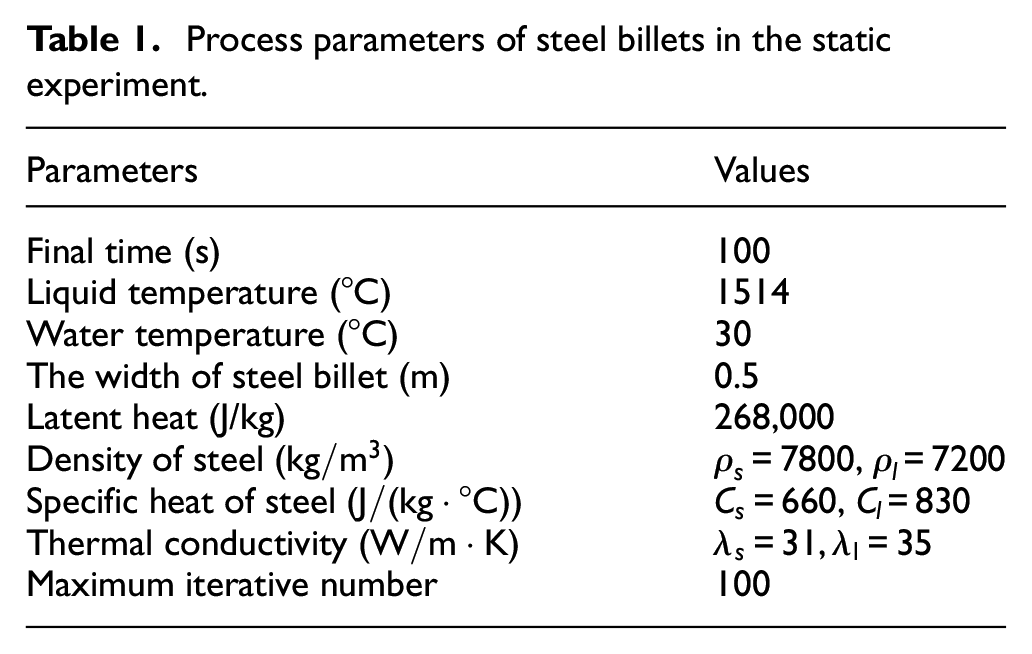
Process parameters of steel billets in the static experiment.
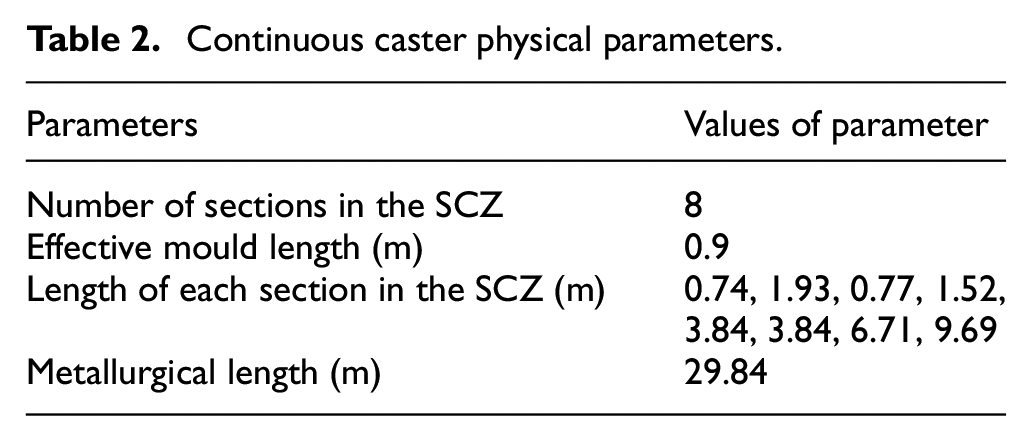
Continuous caster physical parameters.
Case 1: In this case, we specifically analyze the values of parameters
The values of parameters
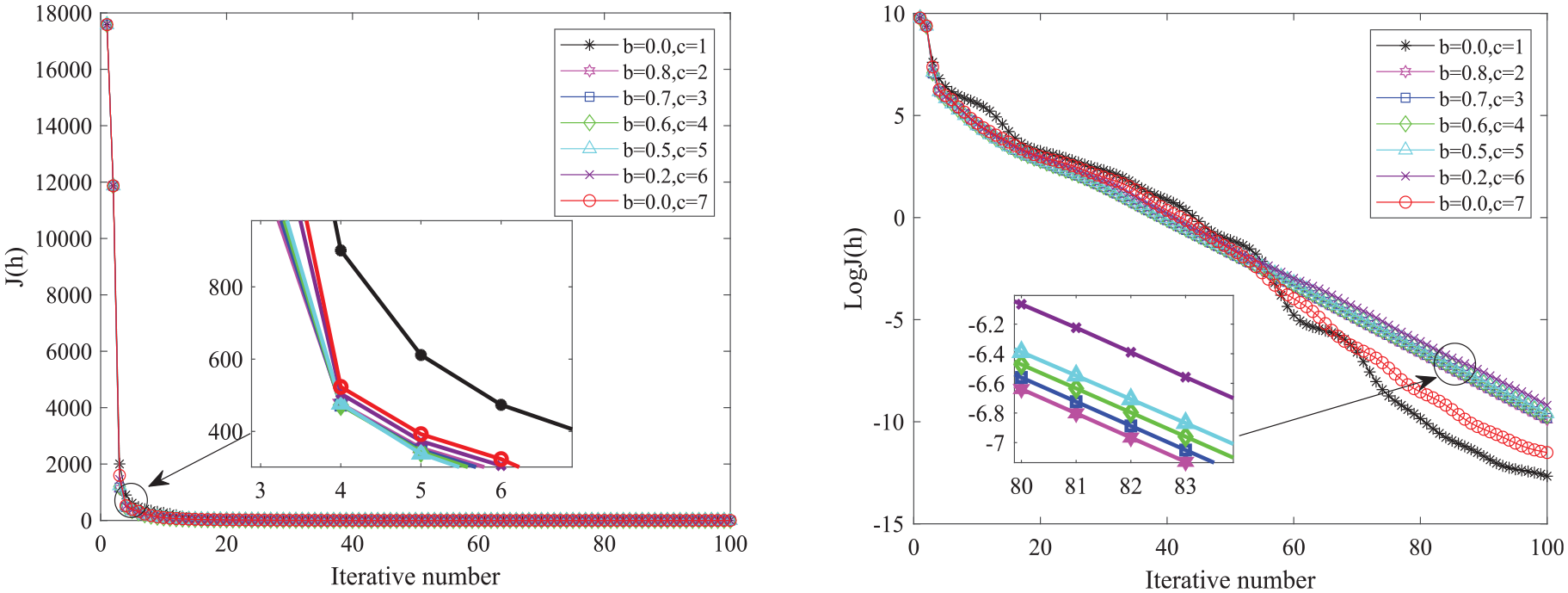
The convergence of the cost function with the number of iterations.
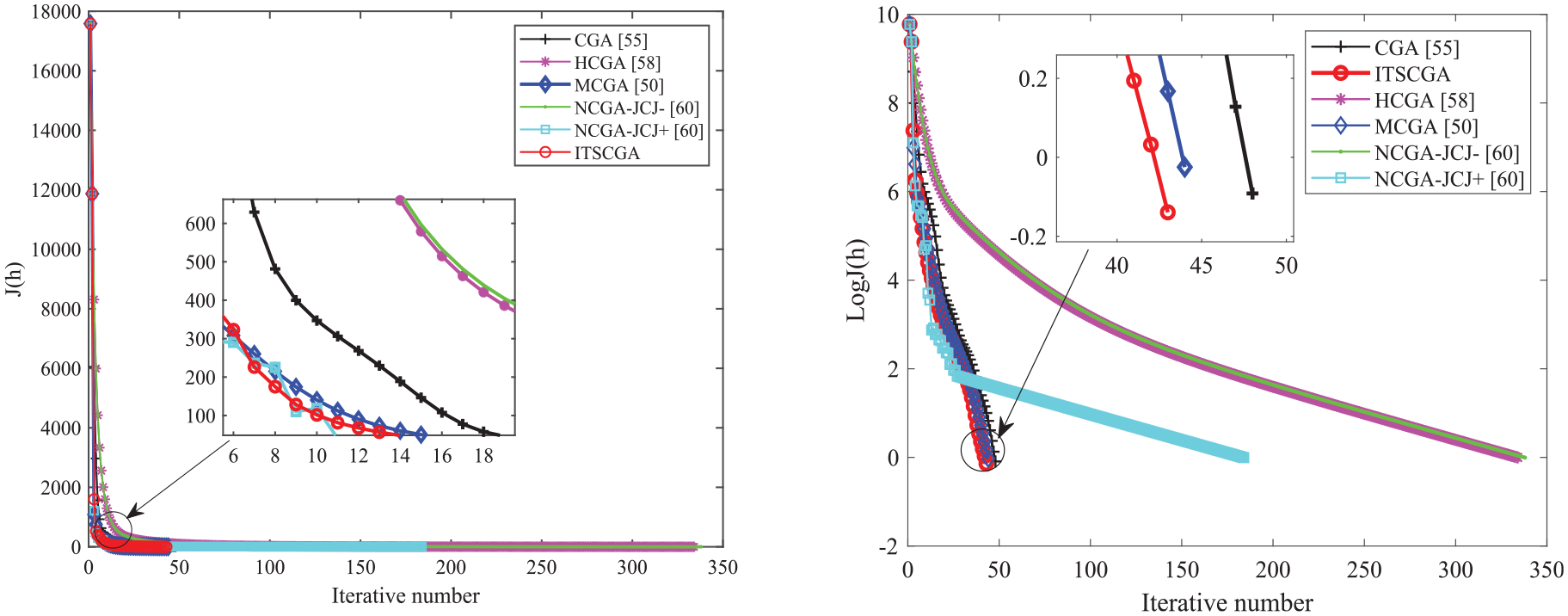
Case 2: In this case, we take the simulation for comparison, in which the ITSCGA is compared with the CGA,
55
the modified conjugate gradient algorithm (MCGA),
50
the new conjugate gradient algorithms (NCGA-JCJ− and NCGA-JCJ+),
60
and the hybrid conjugate gradient algorithm (HCGA).
58
The convergence of the cost function and the number of iterations are shown in Figure 4. In addition, the termination criteria are selected
Comparison of computational performance of algorithms.
The comparison of algorithms.

Case 3: The control effects with six algorithms, including CGA,
55
MCGA,
50
NCG-JCJ+,
60
NCG-JCJ−,
60
HCGA,
58
and ITSCGA, are compared. We set the target temperatures as 955°C, 644°C, 599°C, 567°C, 555°C, 547°C, 550°C, and 553
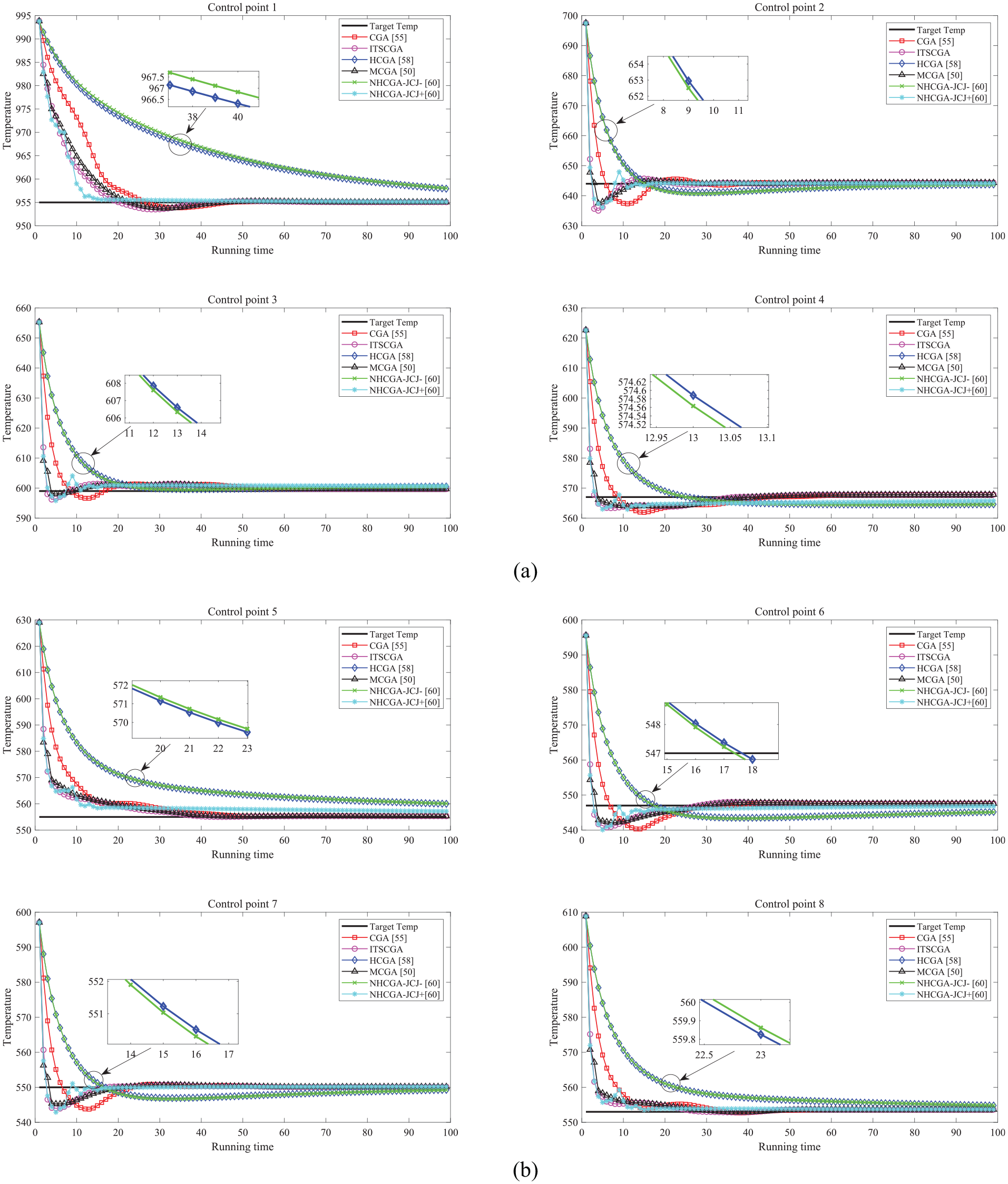
(a) Control effects comparison of control points 1 to 4 in static experimental simulation. (b) Control effects comparison of control points 5 to 8 in static experimental simulation.
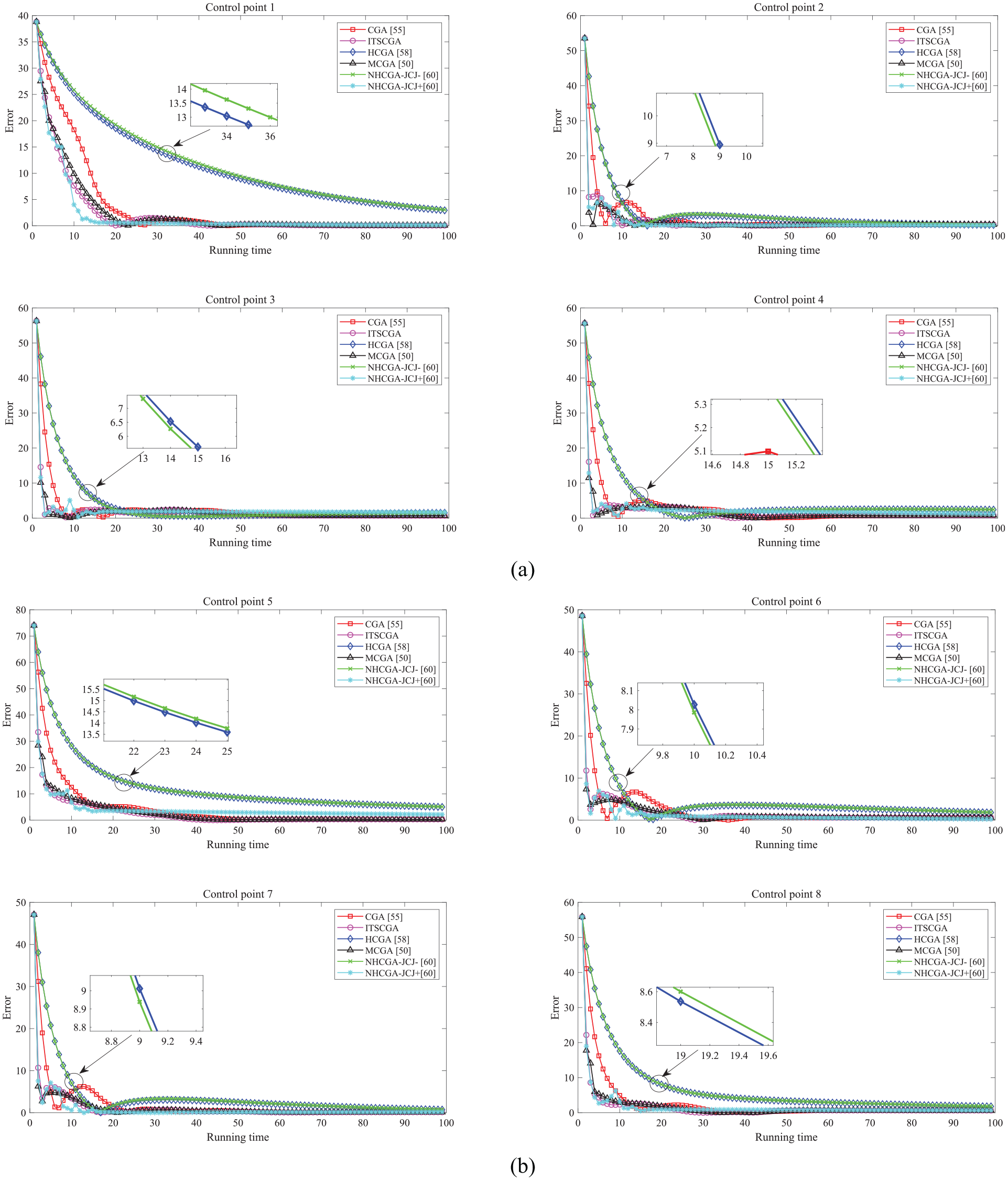
(a) Comparison of error variation curves of control points 1 to 4 in static experimental simulation. (b) Comparison of error variation curves of control points 5–8 in static experimental simulation.
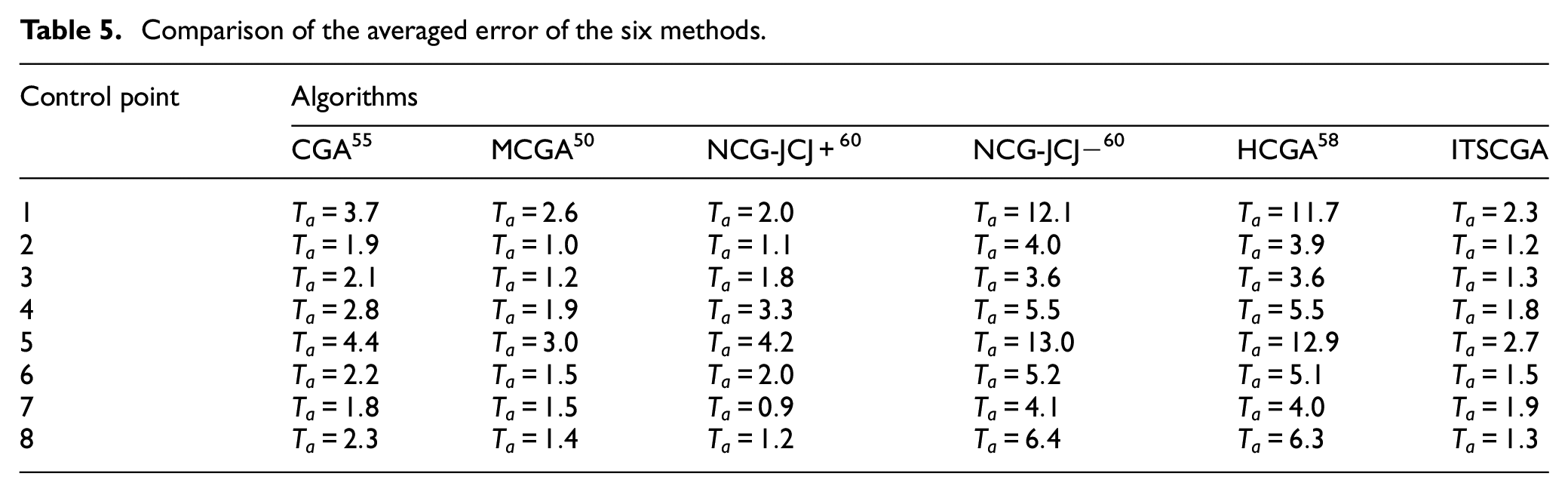
Comparison of the averaged error of the six methods.
Unsteady experiment simulation
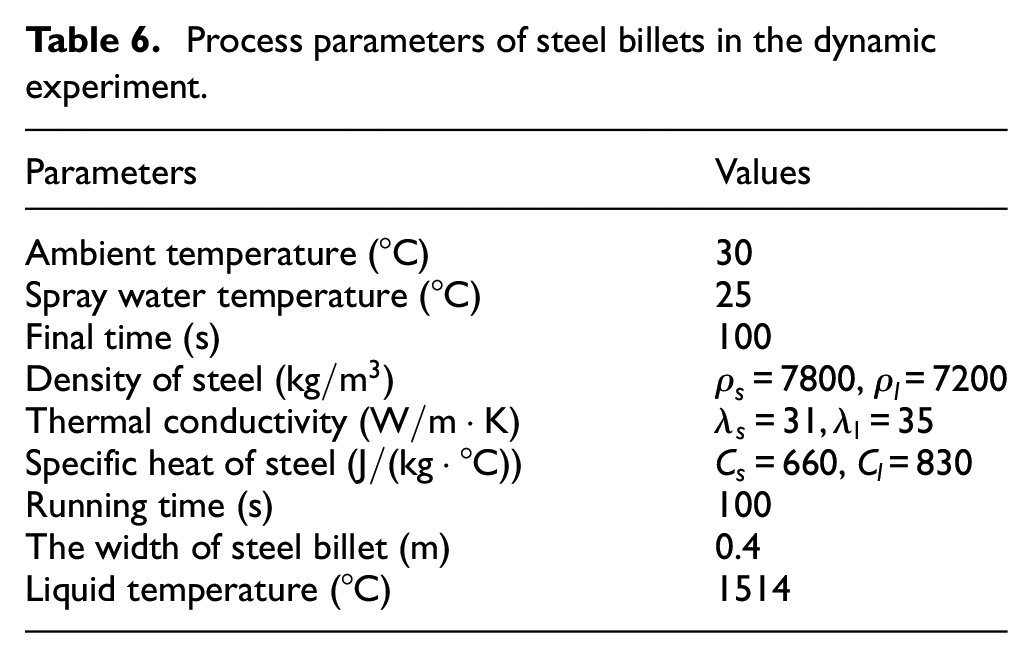
In this section, we carry out unsteady experimental simulation on the OCP. We choose
Process parameters of steel billets in the dynamic experiment.
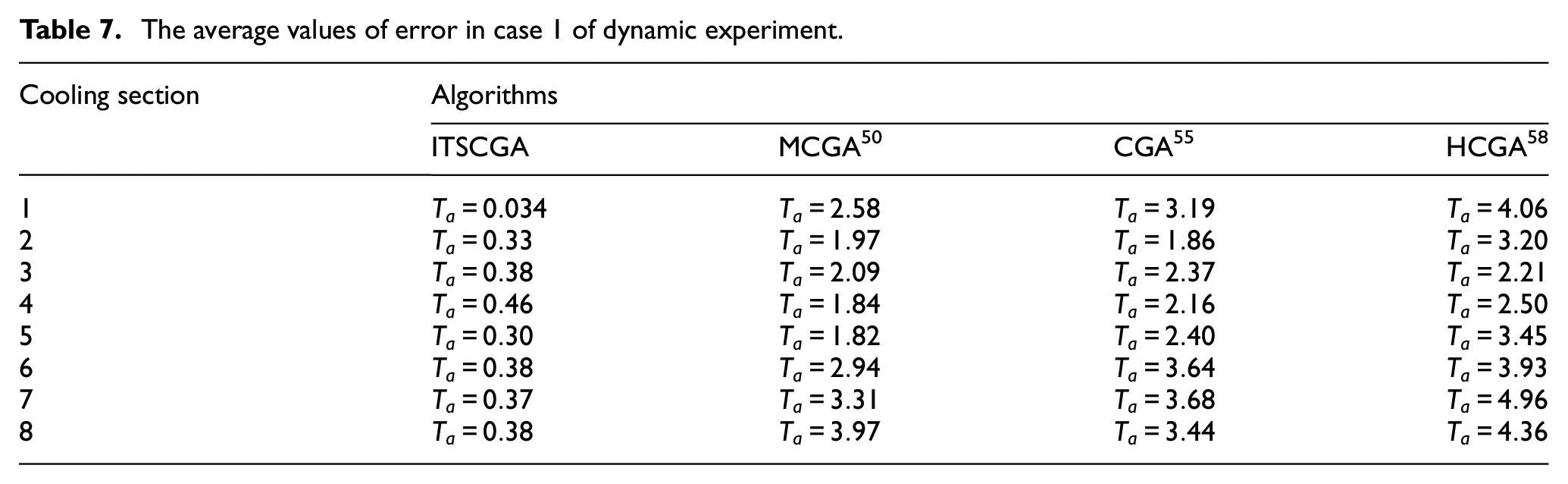
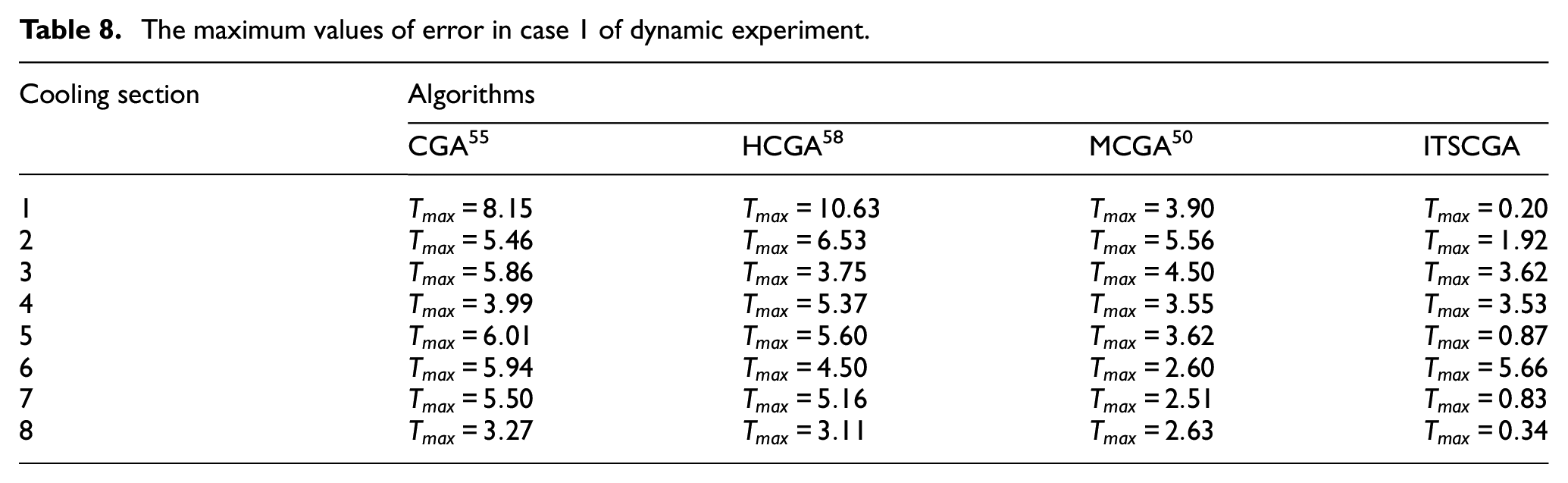
Case 1: The casting speed is changed from 0.8 to 1.1 m/min. We compare the optimization performance of four algorithms, including the ITSCGA, CGA,
55
MCGA,
50
and HCGA.
58
Figure 7 shows the change curve of the cost function
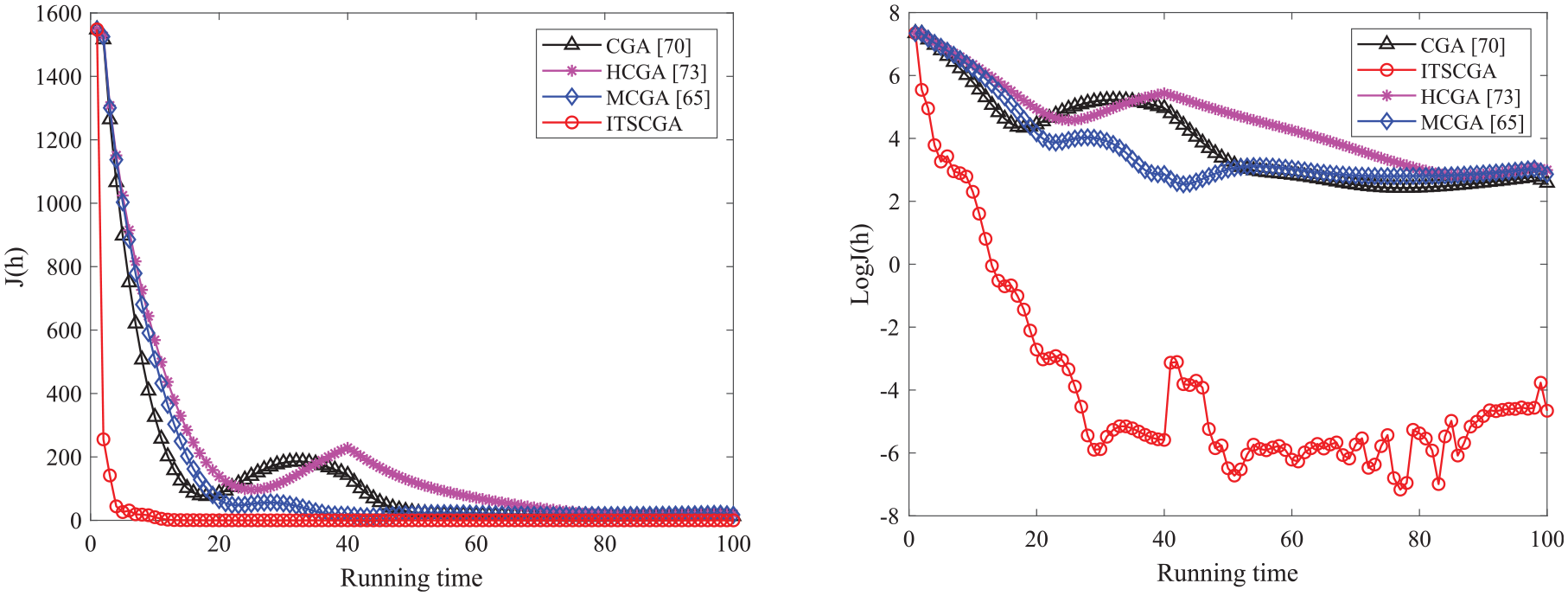
Comparison of convergence of dynamic processes.
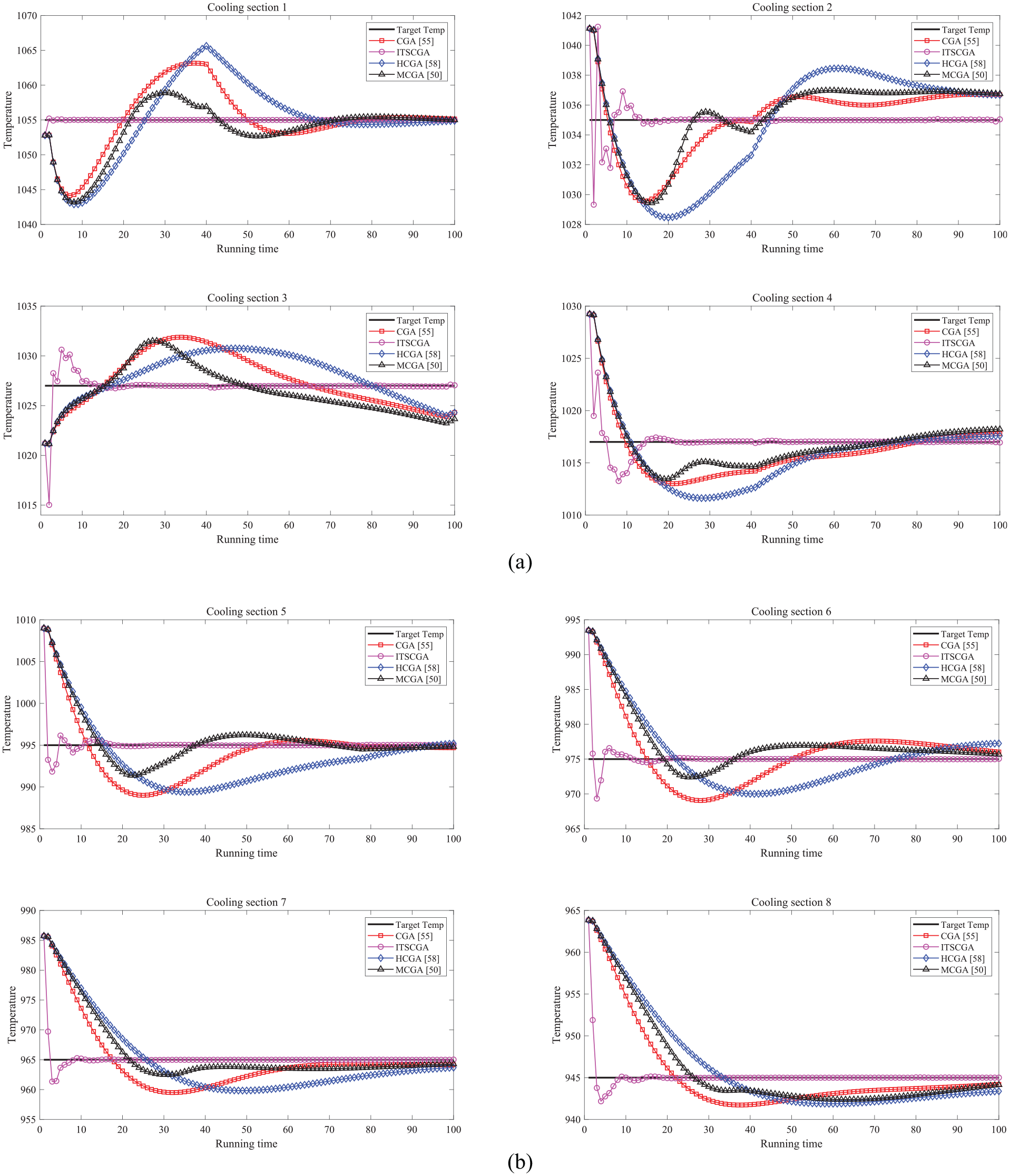
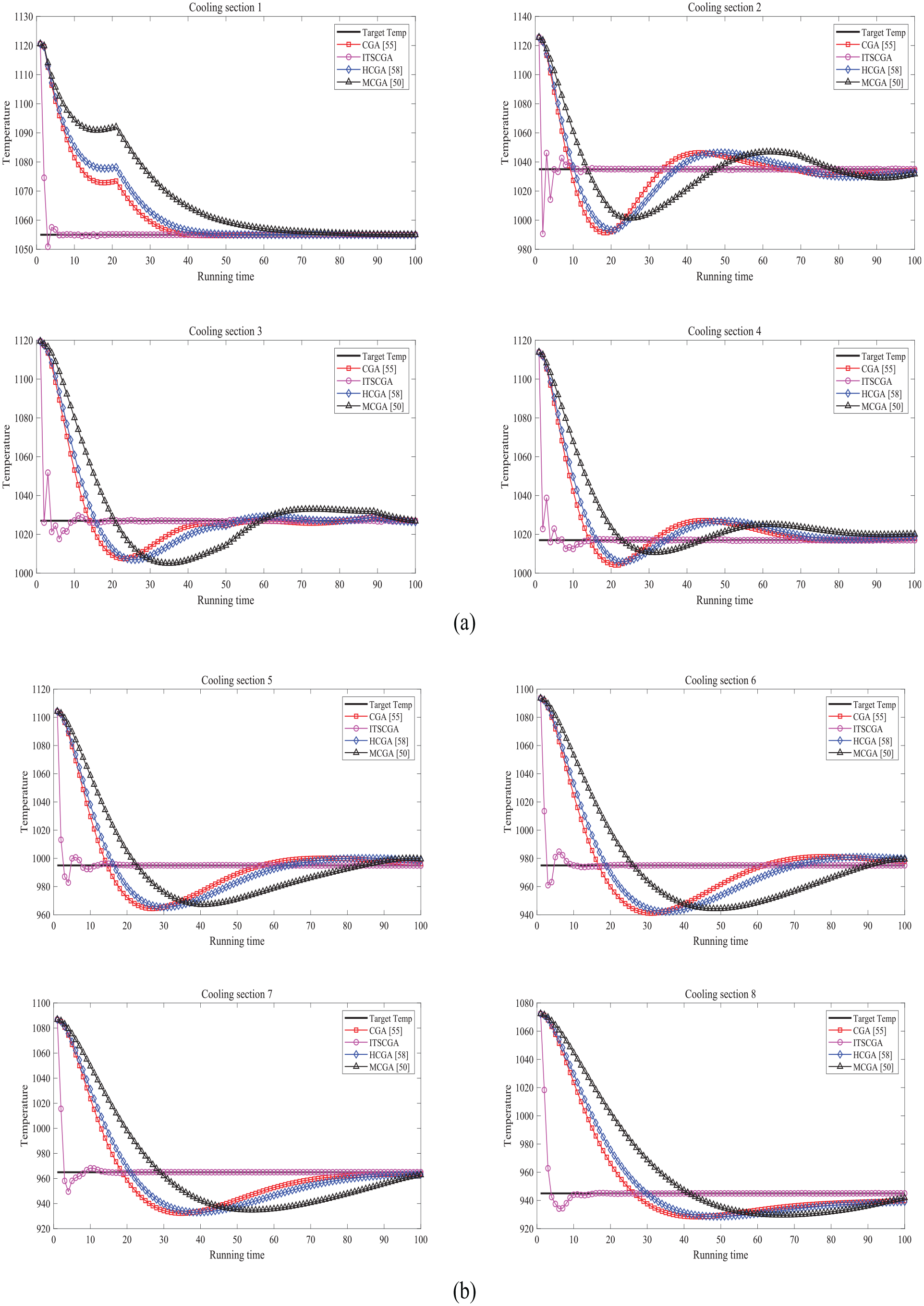
(a) Control effect of cooling sections 1 to 4 in case 1 of dynamic experiment. (b) Control effect of cooling sections 5–8 in case 1 of dynamic experiment.
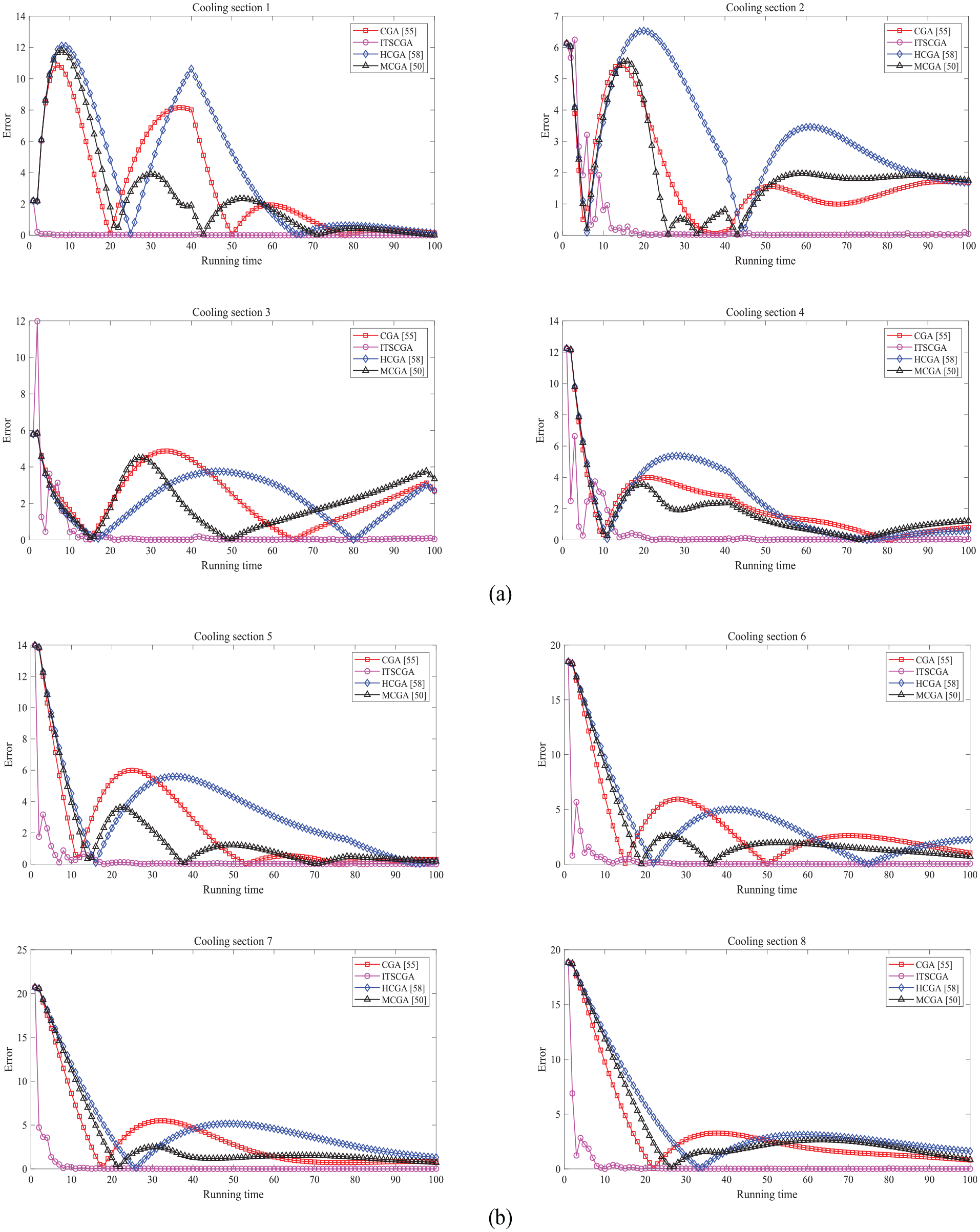
(a) Errors comparison of cooling sections 1 to 4 in case 1 of dynamic experiment. (b) Errors comparison of cooling sections 5–8 in case 1 of dynamic experiment.
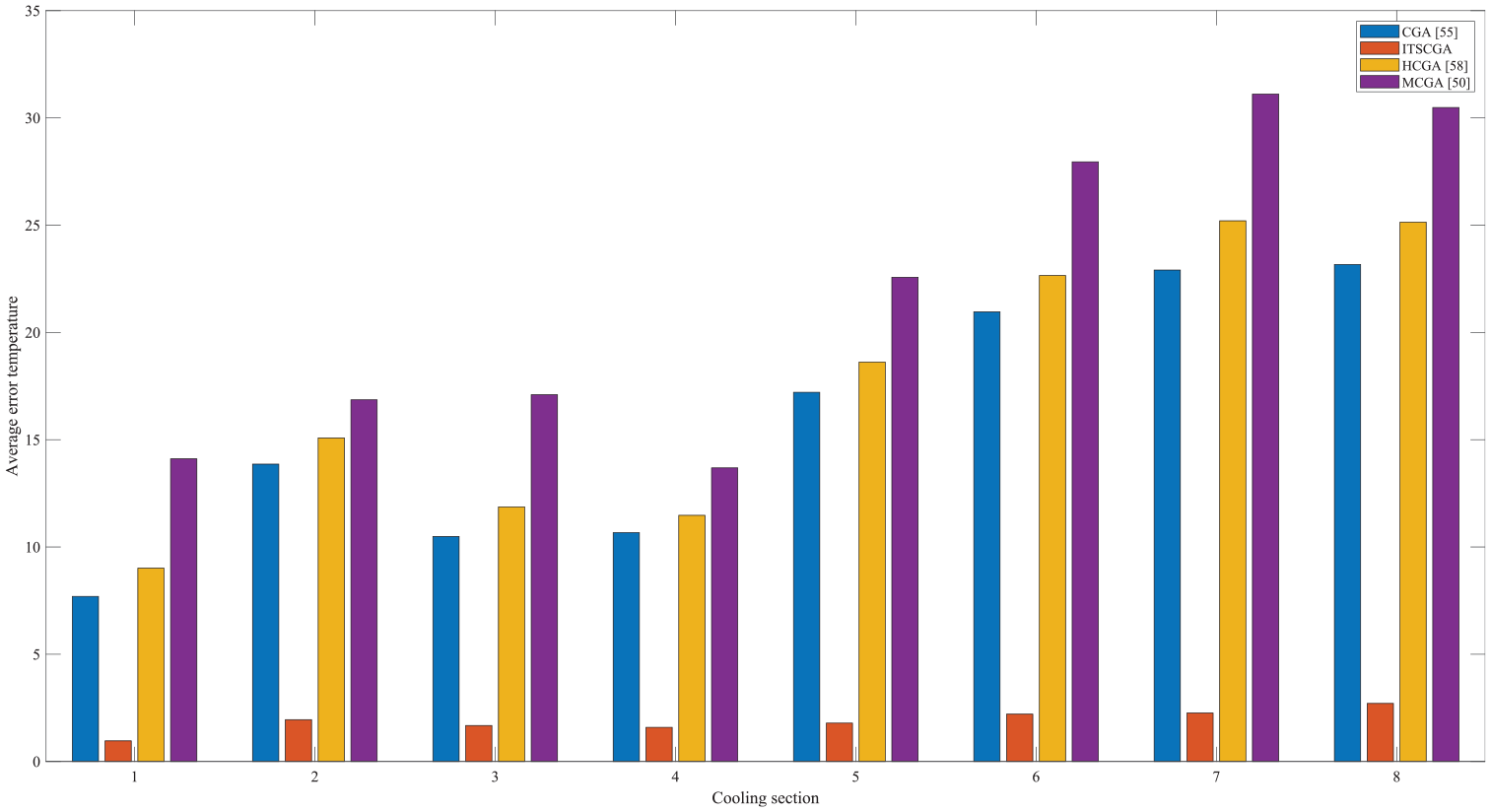
The average values of error in case 1 of dynamic experiment.
The maximum values of error in case 1 of dynamic experiment.
Case 2: The casting speed is changed from 1.0 to 1.6 m/min. In this case, we consider the impact of significant changes in casting speed on control performance of the four algorithms. The control effect of the simulation experiment is shown in Figure 10(a) and (b). It can be seen from Figure 10(a) and (b) that ITSCGA has faster convergence speed and more stable temperature fluctuation than other methods. Figure 11 gives the average error for the four algorithms. From Figure 11, the average error of the ITSCGA is smaller, and the average error values of all eight cooling zones are less than 4
(a) Control effect of cooling sections 1 to 4 in case 2 of dynamic experiment. (b) Control effect of cooling sections 5 to 8 in case 2 of dynamic experiment.
Comparison of average error values in case 2 of dynamic experiment.
Obviously, especially in the case of variable casting speed, the dynamic optimization based on ITSCGA gives smaller temperature fluctuations and obtains a better control effect compared with other methods.
Conclusion
This paper investigates the OCP based on the UHTMCT, and presents a parameterization optimal method that combines gradient analysis based on a Hamiltonian function costate system and an ITSCGA. Firstly, we analyze the expression of the gradient calculation method based on the Hamiltonian function costate system to explore the rapidity of the gradient. Secondly, an ITSCGA is proposed to solve the OCP of the UHTMCT, and the global convergence of the ITSCGA is proved. Lastly, both static and dynamic continuous casting simulation comparisons are tested the optimization performance of ITSCGA, and the results show that the ITSCGA is better than other methods.
Specifically, in the static experiment, the ITSCGA has fewer iterative numbers and a faster convergence rate. Meanwhile, the optimizer based on the ITSCGA provides more stable temperature control, and the average error of the eight cooling zones is smaller than other methods.
In the dynamic experiment, we consider the simulation of continuous casting experiments under two different cases of variable casting speed to verify the stability of temperature control. When casting speed changes from 0.8 to 1.1 m/min, the ITSCGA has a better control effect, and its average error is less than 0.5
In this paper, the optimization of secondary cooling water control under the change of casting speed is studied. In future research, optimization of secondary cooling water flow rate based on the multi-physical coupling, as well as modeling and optimization of crack index model for a slab will be considered.
Footnotes
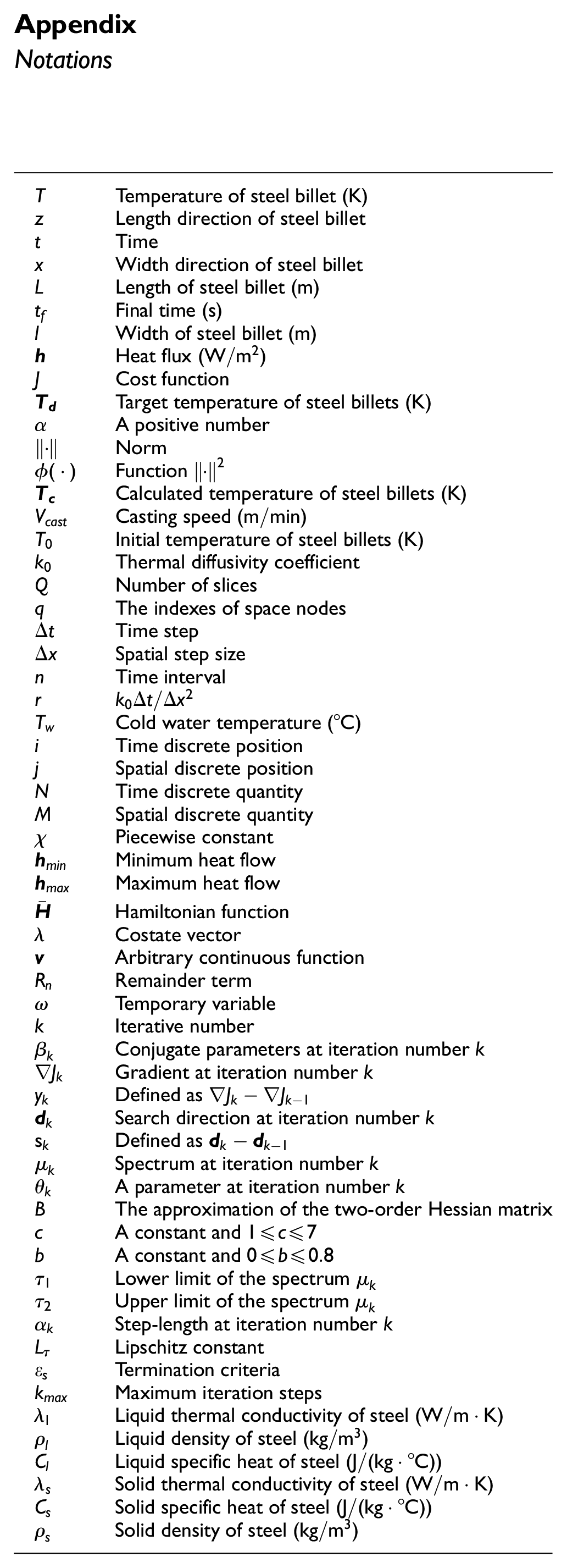
Appendix
Notations
| Temperature of steel billet (K) | |
| Length direction of steel billet | |
| Time | |
| Width direction of steel billet | |
| Length of steel billet (m) | |
| Final time (s) | |
| Width of steel billet (m) | |
| Heat flux | |
| Cost function | |
| Target temperature of steel billets (K) | |
| A positive number | |
| ∥·∥ | Norm |
| Function | |
| Calculated temperature of steel billets (K) | |
| Casting speed | |
| Initial temperature of steel billets (K) | |
| Thermal diffusivity coefficient | |
| Number of slices | |
| The indexes of space nodes | |
| Time step | |
| Spatial step size | |
| Time interval | |
| Cold water temperature ( ) | |
| Time discrete position | |
| Spatial discrete position | |
| Time discrete quantity | |
| Spatial discrete quantity | |
| Piecewise constant | |
| Minimum heat flow | |
| Maximum heat flow | |
| Hamiltonian function | |
| Costate vector | |
| Arbitrary continuous function | |
| Remainder term | |
| Temporary variable | |
| Iterative number | |
| Conjugate parameters at iteration number | |
| Gradient at iteration number | |
| Defined as | |
| Search direction at iteration number | |
| Defined as | |
| Spectrum at iteration number | |
| A parameter at iteration number | |
| The approximation of the two-order Hessian matrix | |
| A constant and | |
| A constant and | |
| Lower limit of the spectrum | |
| Upper limit of the spectrum | |
| Step-length at iteration number | |
| Lipschitz constant | |
| Termination criteria | |
| Maximum iteration steps | |
| Liquid thermal conductivity of steel ( ) | |
| Liquid density of steel | |
| Liquid specific heat of steel | |
| Solid thermal conductivity of steel ( ) | |
| Solid specific heat of steel | |
| Solid density of steel |
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was partly supported by the Natural Science Foundation of Liaoning Province of China (2021-BS-189), National Natural Science Foundation of China (61773269).