
Abstract
An adaptive super-twisting sliding mode control (AST-SMC) is proposed for the power-line inspection (PLI) robot system with two degrees of freedom and single control input underactuated with multiple balances. Firstly, the nonlinear dynamic equation of PLI robot is established, and the model is linearized at the nominal equilibrium point. Secondly, a special transformation is introduced to transform the original input delay system into a delay-free model, and an equilibrium manifold linearization (EML) model is established by using scheduling variables to expand the operating range of the controlled system, as a result of which the disturbance observer control (DOC) is designed to estimate the external disturbance. Thirdly, in order to achieve fast convergence and continuous control, the super-twisting sliding mode control(ST-SMC) method is proposed to decrease chattering in the control law. Finally, it can be verified by Lyapunov stability theory that the system reaches the sliding mode surface in finite time and the trajectory tracking error converges to zero in finite time. The simulation results verify that the combination of DOC and AST-SMC has a optimal disturbance approximation and control convergence ability, clarifying the effectiveness and robustness of the proposed control scheme.
Keywords
Introduction
Power Line Inspection (PLI) robots can automatically or remotely inspect outdoor high-voltage equipment in substations,1,2 checking for a variety of problems inside the power equipment, and then provide operators with relevant data to diagnose possible accidents during the operation of the power equipment. 3 Therefore, in order to ensure the safe and stable operation of transmission lines, it is necessary to carry out regular inspection of transmission lines. 4 Recently, domestic and foreign scholars have done lots of research on detection robots and the research on PLI robots has become a hot topic. PLI has various functions such as testing,5,6 maintenance,3,7 nondestructive testing,8,9 and so on, some of which have been applied to the electric power field.
PLI robot is an underactuated nonlinear system, 10 which can carry the corresponding detection equipment and execution structure to run on the transmission line.11,12 The number of actuators of the system is less than the number of degrees of freedom to reduce the operation cost of the system, so it is widely used in high-voltage line detection tasks. 13 However, the controller design of the underactuated system is much more complex than that of the fully actuated system, especially when the robot works on the high-voltage line, and thus the underactuated system will be affected by multiple external disturbance, causing the system performance degradation. 14 The time delay caused by signal transmission and detection is also common in the actual system, which will cause the instability and inaccuracy of the system. Therefore, for the control of many practical systems, the input delay cannot be ignored and the influence of input delay is also considered in this paper. After all, it is still a challenging task to improve the processing ability of the controller for the uncertain underactuated PLI robot system.
In Kolathaya, 15 the stability characteristics of underactuated robot systems with proportional derivative (PD) control for trajectory tracking are studied, and the PD control law for fully actuated systems is extended to underactuated robot systems. However, this method requires specific time intervals and sufficiently large PD gain. For the underactuated manipulator system with complex nonholomic structure, a state feedback control structure based on energy switch is proposed in Kara and Arici, 16 in which only one actuator is completely free at the shoulder and elbow joint. However, the linear state feedback control method cannot stabilize the system near any equilibrium point, so a control system using two steady-state feedback controllers and an energy-based monitoring switch mechanism is proposed, where the stable controller is obtained by partial feedback linearization. In Jiang and Astolfi, 17 the underactuated inversion method (BC) is introduced to solve the stability problem of inertia wheel pendulum, and it is extended to a class of underactuated mechanical systems. BC methods is proven to produce successful processes in the control of systems with (strict) feedback forms,18,19 but for underactuated systems the above BC algorithms are often complicated in form and cannot be effectively implemented, only ensuring the stability of the system at the nominal equilibrium point. It can be seen that many of the methods used to control such systems are nonlinear, and it is difficult to control or stabilize the systems. Unstable zero dynamics will lead to instability of the whole system, so the equilibrium manifold linearization (EML)20,21 method is used in this paper to transform the nonlinear system into an equivalent model by using scheduling variables. Most of the control algorithms proposed above are only stabilized near their linearized nominal points, while the equilibrium manifold model has high accuracy near all equilibrium points. To solve this problem, researchers proposed to extend the linearization model to the equilibrium manifold linearization (EML).22–25
In the inspection process, the robot will inevitably be affected by external disturbances such as wind and wire vibration.26,27 Meanwhile, the time delay 28 caused by signal transmission and detection needs time is also widespread in the actual system, which will lead to the instability of the system. Based on the idea of variable structure, 29 the sliding mode control (SMC) 30 is proposed by combining sliding mode and control. SMC has a strong robustness when applied to robot control system. However, the design of this method requires the switching gain to be larger than the upper bound of unknown dynamics and disturbances, which has chattering phenomenon31,32 and is always highly estimated. To avoid this phenomenon, the terminal sliding mode control,33–37 global sliding mode control, 38 high-order sliding mode control,39–42 time delay sliding mode control(TD-SMC)43–45 and etc. are proposed. TDC does not need continuous feedback, only it need the natural frequency and damping ratio of the system 44 used to output the response of the system or estimation from the system model to prevent unnecessary oscillations. After all, the combination of TDC and SMC makes out a good control effect. 46 In order to achieve fast convergence and continuous control, an AST-SMC method is proposed in reference, 47 and at the same time, the super-twisting method is used to overcome chattering in the control law and the adaptive technique is used to compensate the lumped disturbance with unknown upper bound.
Chen et al. have done a lot of research on finite time control design.48–50 In the presence of uncertainty, nonlinearity and perturbation, an anti-interference controller is proposed in Chen et al., 49 dealing with the finite-time stability control and chatter-free sliding mode design strategies, which performs a strict finite-time stability analysis at the origin equilibrium point. However, the response is not fast enough. In Saleh et al., 51 a robust controller is designed by combining the finite-time tracker and disturbance observer, so that the adaptive finite-time second-order sliding mode tracker of the robot can achieve accurate tracking control, robust performance and parameter tuning, which finally make the tracking error of the manipulator reach a balance in finite time. After all, the purpose of this paper is to deal with the PLI robot with the external disturbance and input delay. On the basis of EML model, hybrid control methods combined with the advantages of sliding mode control, the adaptive robust control and super twisting are proposed in this paper to enable the system to track the reference signal fast and to enable the PLI robot to the optimum performance.
The novelties of this study in comparison with other studies can be scheduled as follows
The EML model of PLI robot is established based on scheduling variable, transforming the underactuated PLI robot into a linear model, which makes it have high accuracy near all equilibrium points and expands the scope of the operation of PLI closed-loop system to meet the needs of simulation to a certain extent.
Considering the behavior of PLI robot under the action of external nonlinear disturbances, the disturbance observer control (DOC) is designed to estimate them, replacing the uncertain external disturbance in the original equation with the disturbance estimation error to overcome the infeasibility of calculation on the original model.
For the sake of fast convergence and continuous control, the AST-SMC method is adopted, where the super-twisting method is used to get over chattering in the control law and ensure the continuity of output, and meanwhile the adaptive technique is used to compensate the lumped disturbance with unknown upper bound. This strategy does not overestimate the control gain, which further reduces the influence of uncertainty and disturbance on the system.
The importance of the suggested method
Firstly, the combination of DOC and AST-SMC proves better disturbance approximation and control convergence ability, verifying the effectiveness and robustness of the proposed control system and providing the design of PLI robot system with a new scheme.
Then, the time delay caused by signal transmission and detection is also widespread in the actual system, which will lead to the instability and inaccuracy of the system. In this paper, a controller design of the underactuated system is proposed, with a faster convergence speed and quite shorter reaction time, improving the processing ability and reducing the reaction time of the controller for the uncertain underactuated PLI robot system.
Last, considering the relatively harsh working environment of the PLI robot, the complex and multiple influence of both external disturbances and input delays is considered to enable the system to accurately track the reference signal and shape the model more suitable for the actual situation, with stronger anti-interference ability and higher working performance than other asymptotic convergence results.
This paper is organized as follows: Section I introduces the research status of control methods for underactuated nonlinear systems. Section II introduces the state equations of the underactuated PLI nonlinear system and the problem faced at present in this part. Section III describes DOC, which deals with external disturbances to the system. In Section IV, the EML model of PLI robot is established and the AST-SMC is proposed to process the input delay of the system. In Section V, comparison in the simulation results are given to verify that the proposed controller is reliable and optimum. Section VI presents the conclusion.
Model introduction and problem statement
Dynamic model of PLI robot
Considering the underactuated PLI robot with two degrees of freedom and single control input, the motion equation governing the balance adjustment of PLI robot is obtained by using Euler-Lagrange equation 12 and the balance adjustment parameters of PLI robot are shown in Figure 1.
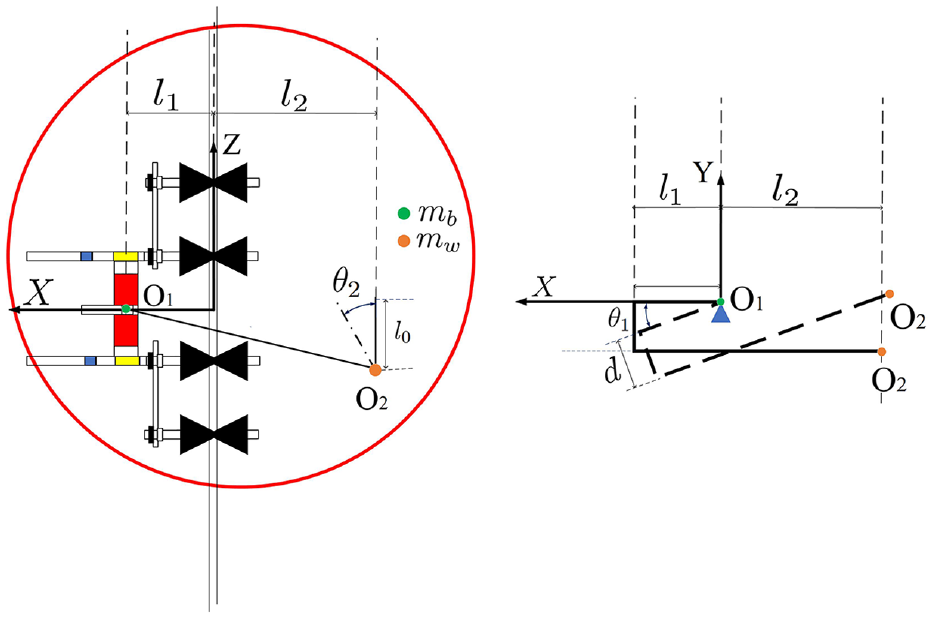
Model in the XOZ plane and in the XOY plane.
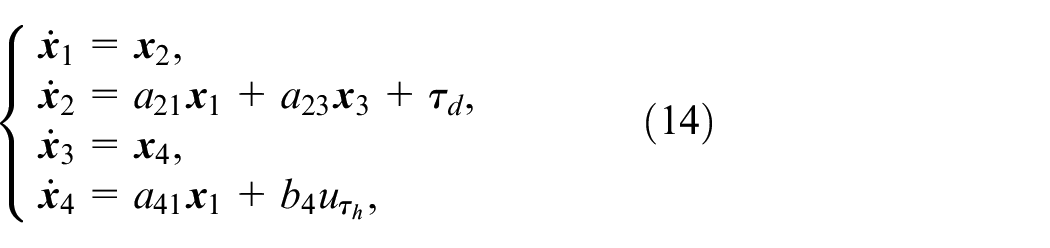
Based on the Euler-Lagrange equation, the motion equation of the balance adjustment process of PLI robot subject to external disturbance and input delay is obtained. The equation is as follows:

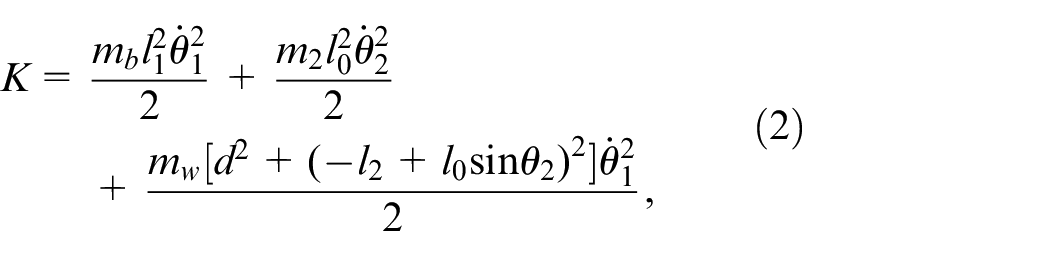

where

The state variable vector of PLI robot is selected as

According to previous studies on the dynamic model of PLI robot, 3 the state equations can be expressed as

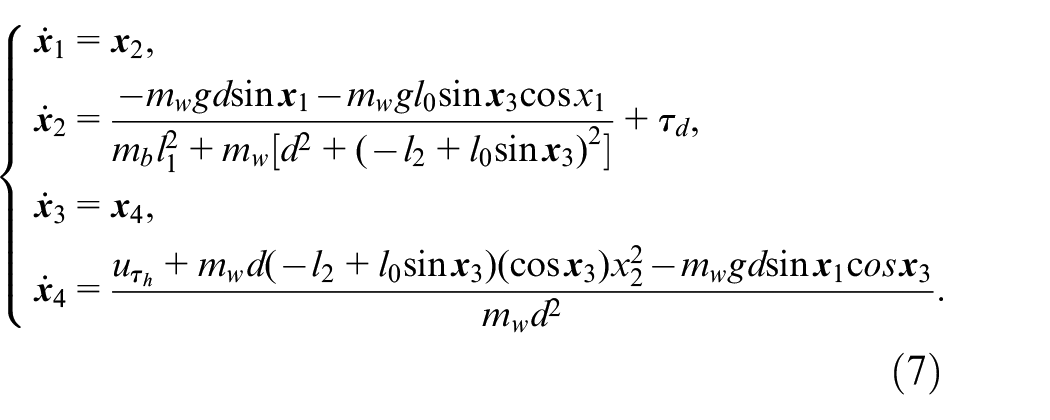
From the equations above, it can be seen that any

In this case, the state space equation of PLI robot is as follows:
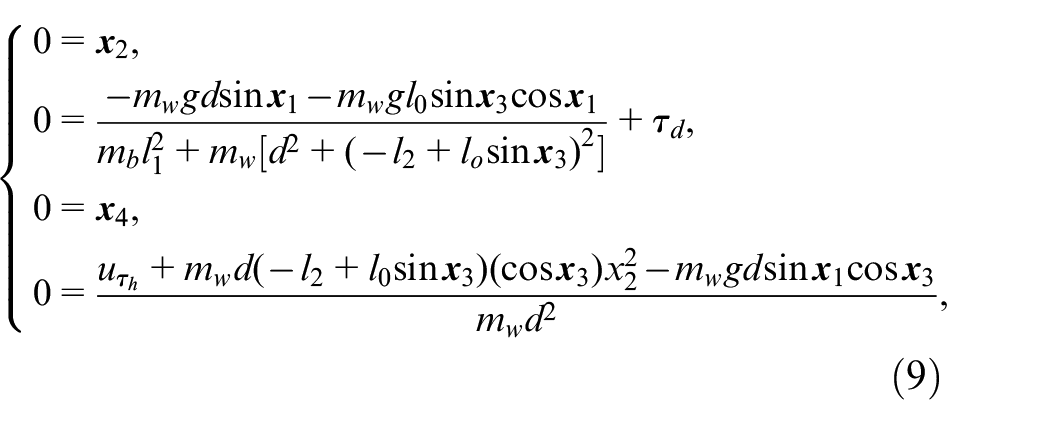
And the transformation of equation (9) can be obtained:
From equation (10), it can be obtained that each
Establishment of EMl model for PLI robot
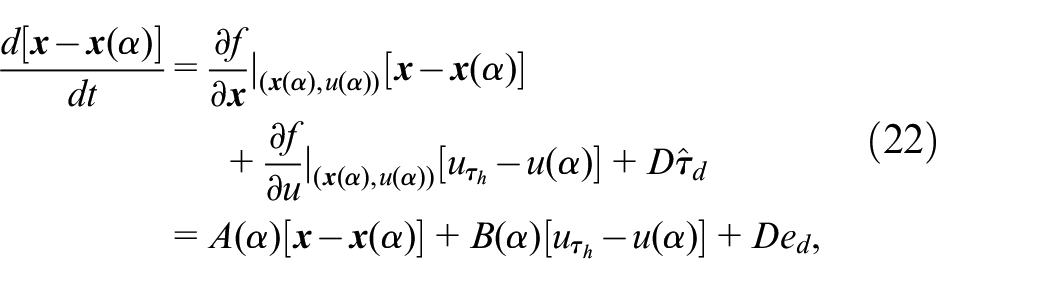
The PLI robot is linearized at the equilibrium point, and the linearized equation of the nonlinear system based on the equilibrium point
where
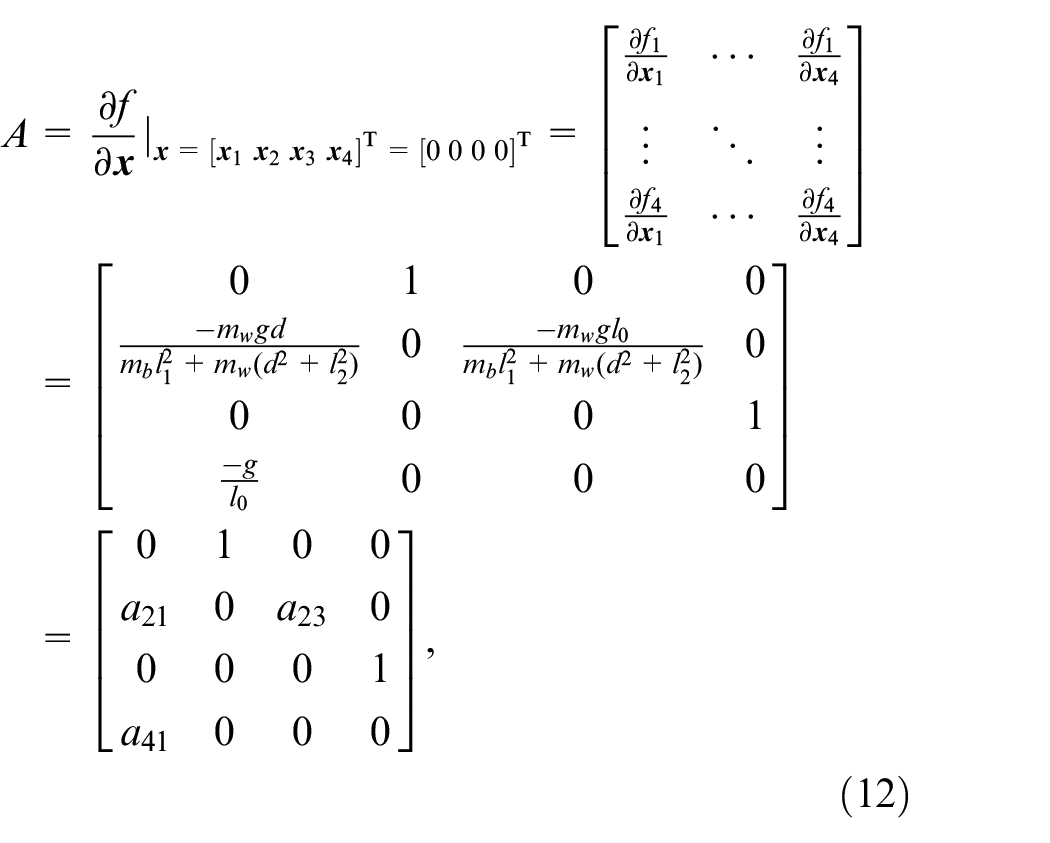
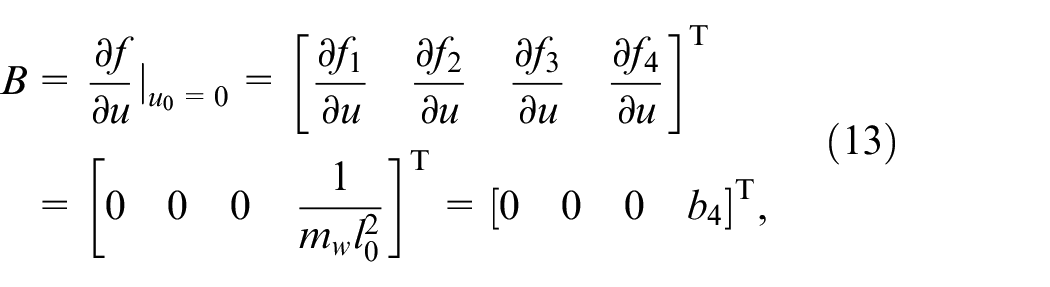
From equations (12) and (13), PLI linear system equation (11) can be further transformed into the following equation
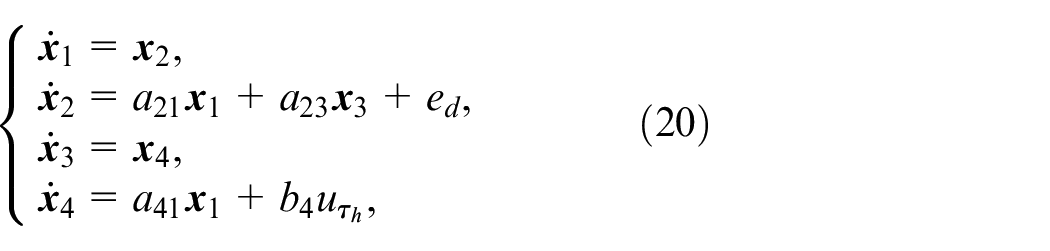
And the external disturbance satisfies all the following assumption.
According to equation (14), it is a problem that the traditional designed PLI controller based on the linearization model is only applicable at the nominal equilibrium point of the system. It is difficult to control or stabilize such systems, while the equilibrium manifold model has high accuracy near all equilibrium points. To solve this problem, this paper used scheduling variables to expand the linearization model into EML model to ensure that the designed PLI controller is suitable for the whole nonlinear system. The EML model of PLI robot will be introduced in Section IV.
Design the disturbance observer
Considering the behavior of PLI robot under the action of external disturbances, a nonlinear disturbance observer is designed for the external disturbances in equation (9), which has the following form:
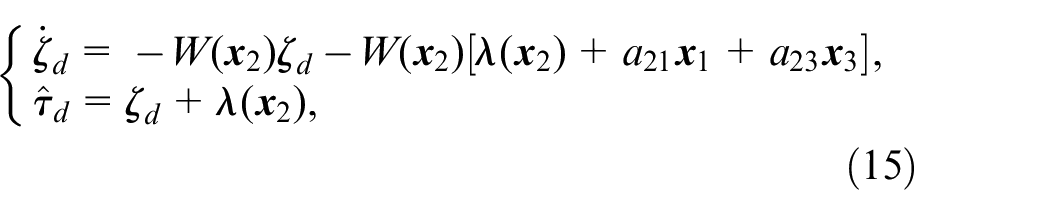
Where

The disturbance estimation error is defined as
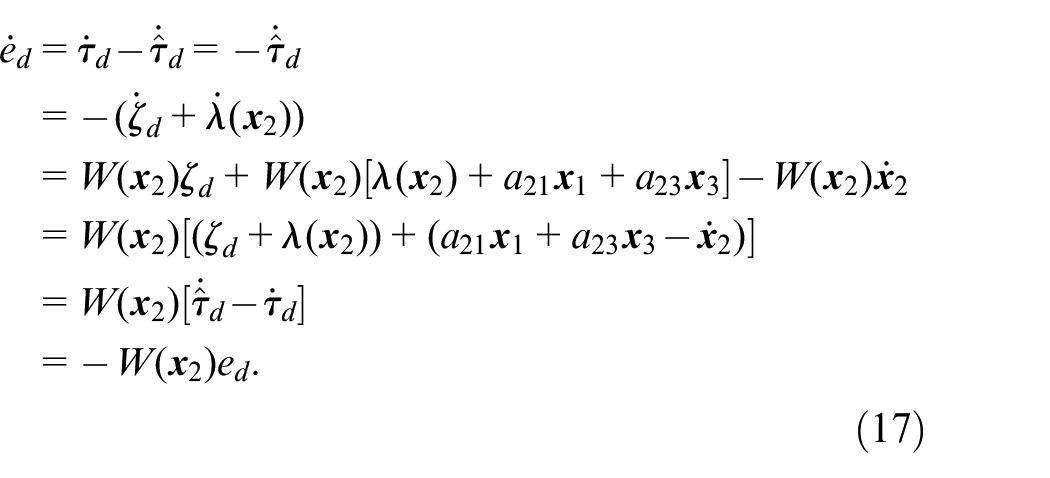
Choose a Lyapunov function candidate

And then take the first-order derivative of

This can be achieved by choosing such a reasonable function
Design super-twisting sliding mode control
PLI robot equilibrium manifold linearization model
The nonlinear model of the PLI robot can be expressed as:

According to the analysis in the second part above, when the closed-loop system is near the equilibrium point

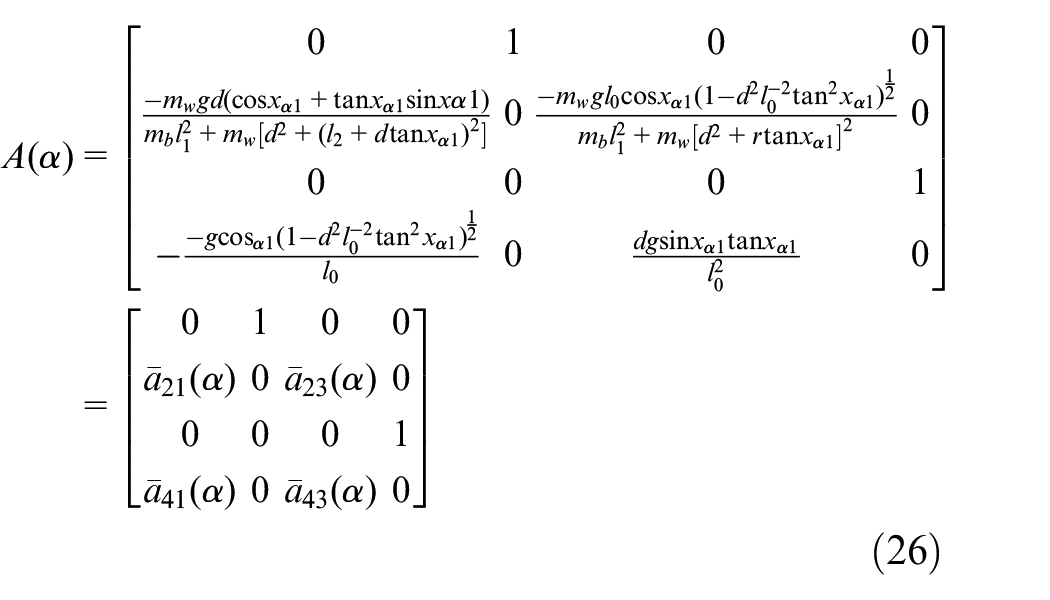
According to equation (10), the parameters in equation (22) are designed as



In this paper, the reference signal is chosen as
Next, new system is imported:

where


That is,
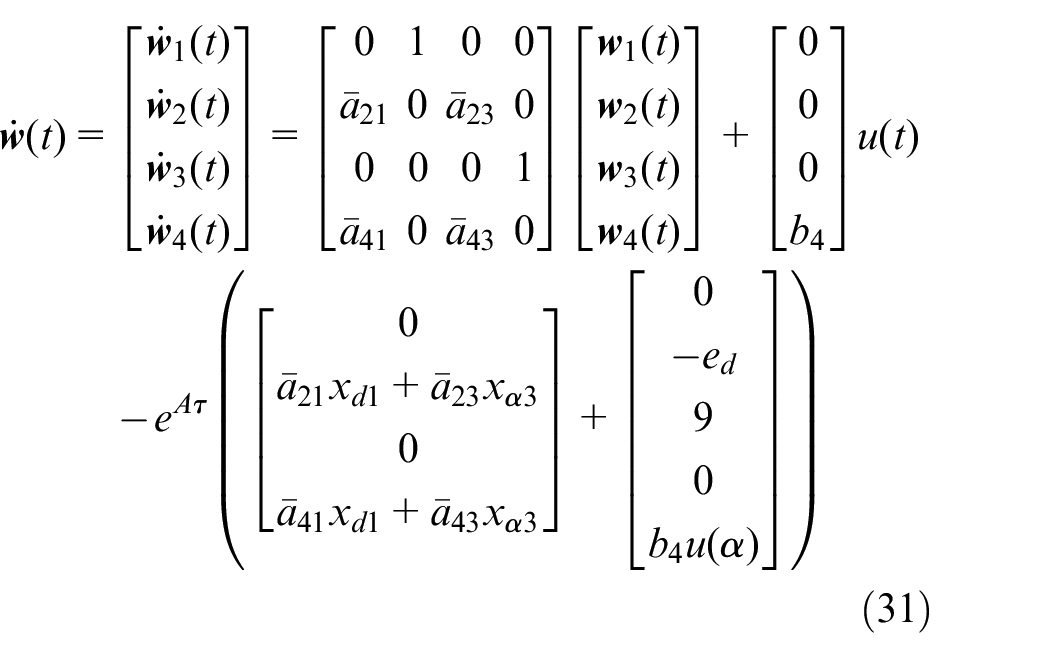
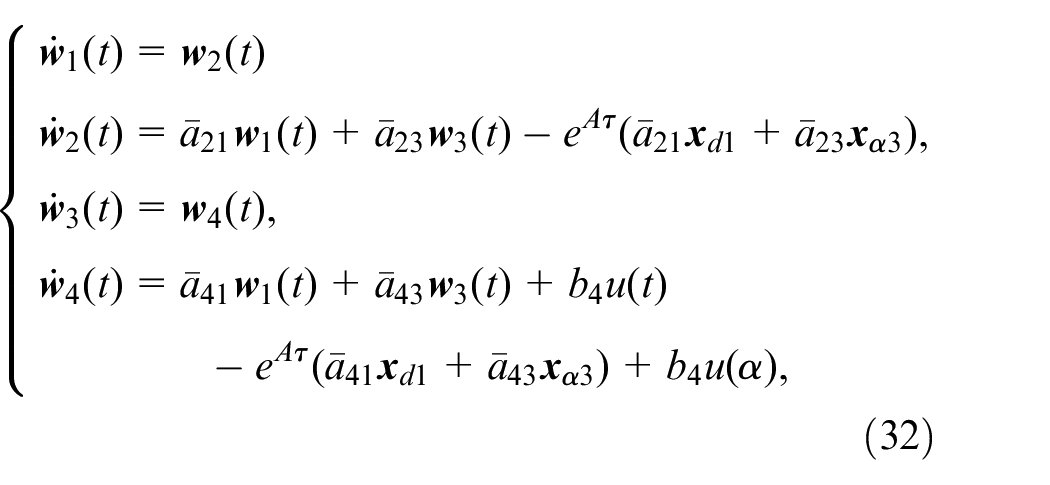
Equation (31) of the equilibrium manifold linearization model is displayed, and the following equation can be obtained:
AST-SMC
In order to facilitate the subsequent calculation and analysis, the following reasonable lemmas and assumptions are proposed before introducing the controller in this paper.
where
Lemma 1 53 : From the transformation (28), we have

where
(i)
(ii) There exist real numbers
Then, the origin
The expected value of the PLI robot predetermined by the open-loop path planner is set as

And then we take the derivative of the error
Now we can choose super-twisting sliding mode as:


where


substitute the derivative of
The controller

where
denotes the standard signum function, and


Theorem 1. For PLI robot system, equation (22) subject to input delay and external disturbance. Under assumptions 1–2 and Lemma 1–2, adaptive super-twisting sliding mode control method equation (38) is used to design controller equation (43) and switching gain equation (46) (47) as finite-time converging. And the maximum convergence time range of the system can be obtained by transformation solution.
Then, the Lyapunov function

where
Next, using equation (43) of controller, we can obtain
In order to make it simpler, set
The adaptive gain of controller designed in (46) (47) is substituted into the above equation, and equation (49) is further transformed into:
where
From equation (52), in order for
If
From the above discussions, function
In this case the sliding mode surface

By a simple formula conversion, we can substitute the designed


Finally, we design Lyapunov function

And then we take the derivative of the formula:
We can see that the final

Integrate both sides of equation (61), we can obtain:
After some simplified calculation, the equation (61) can be reduced to the following form:
From these equation above, the maximum convergence time
According to equation (63), when
The basic idea of the controller design makes full use of the finite-time stability theory and the special structure of AST-SMC. When the input is bounded, the PLI robot will finally reached the equilibrium point. Figure 2 shows the flow chart of control design.
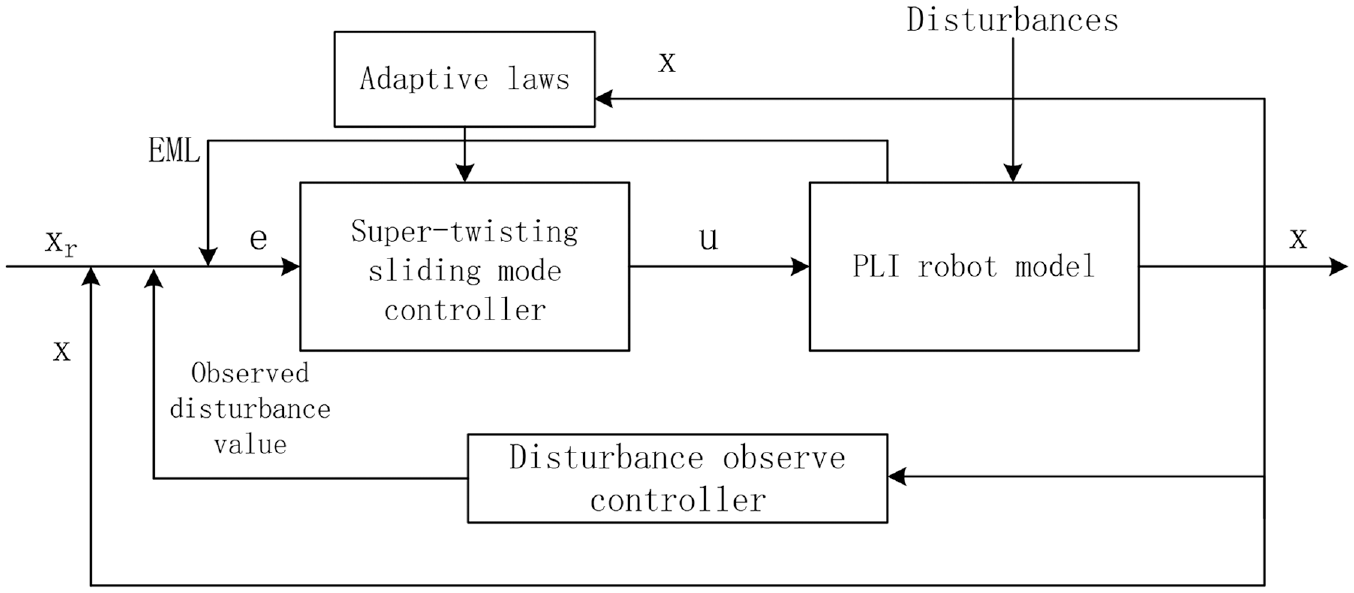
Block diagram of system.
Simulations
In order to verify the effectiveness of the proposed DOC and AST-SMC controller, in this section we will perform matlab simulation on a fourth-order PLI robot system.
The specific parameters of PLI robot are as follows, and more detailed system physical parameters can be seen in Chen et al. 49
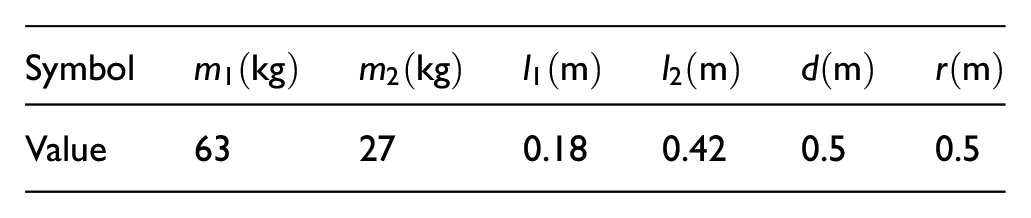
The model parameters selected in the simulation design are
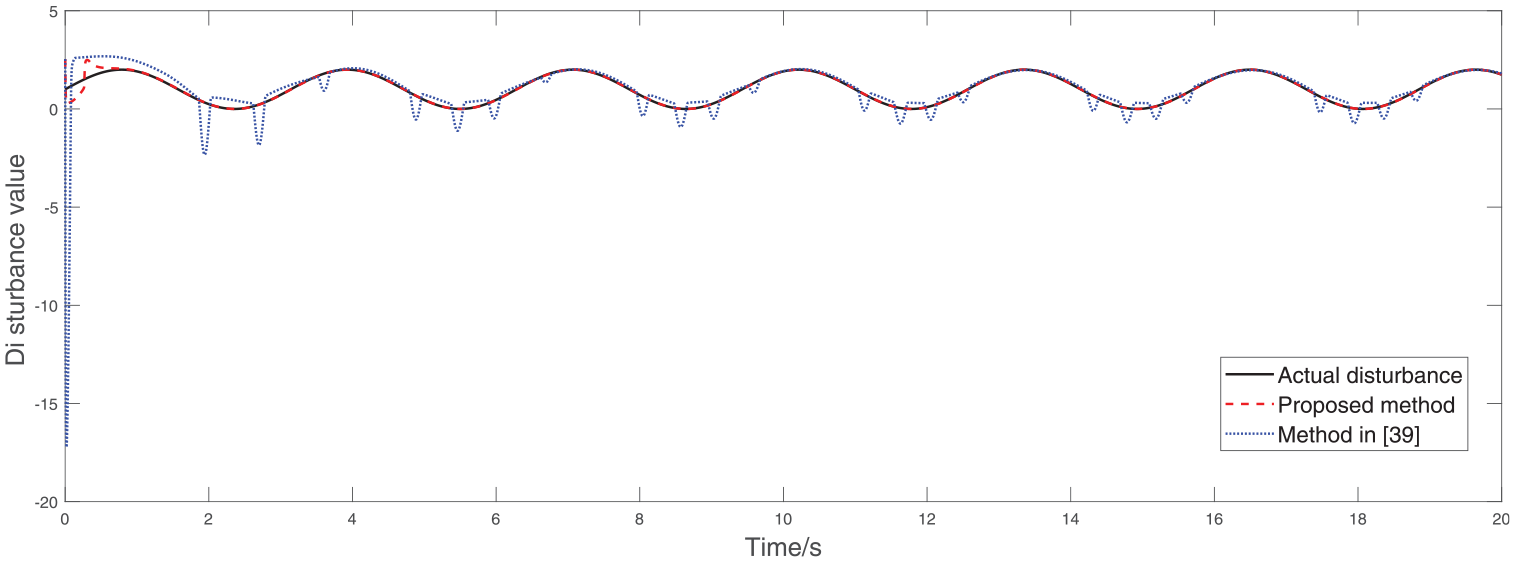
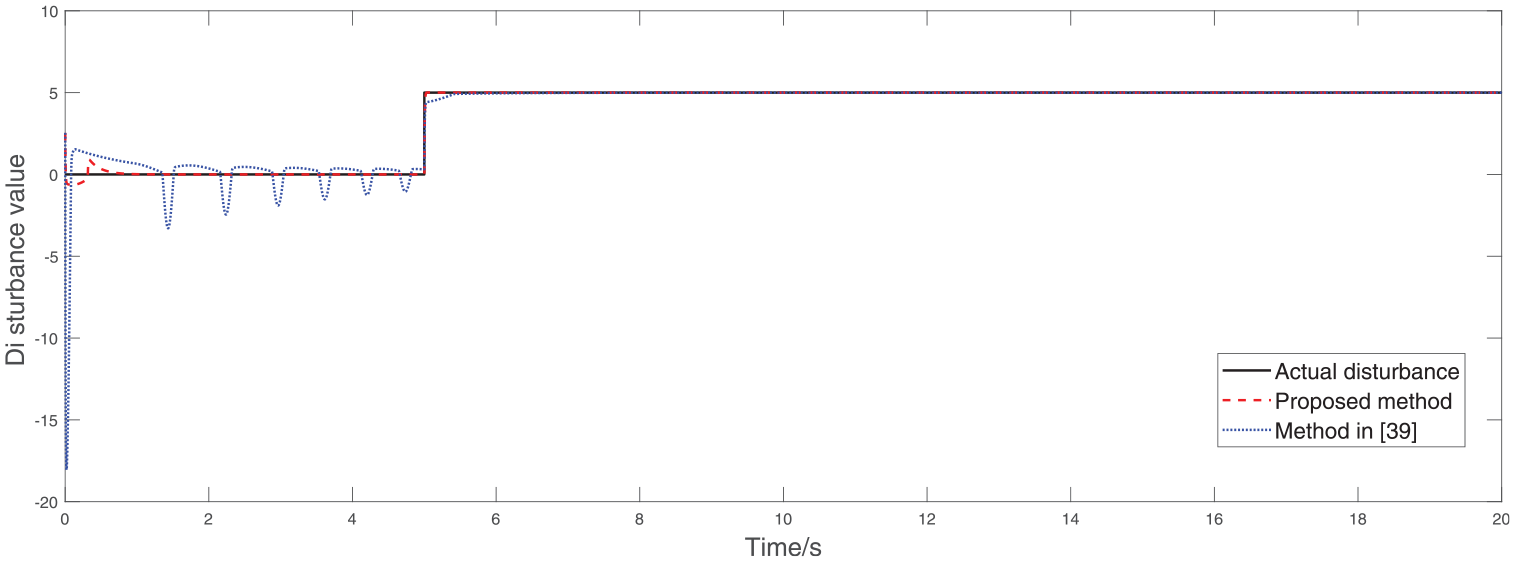
Disturbance actual value
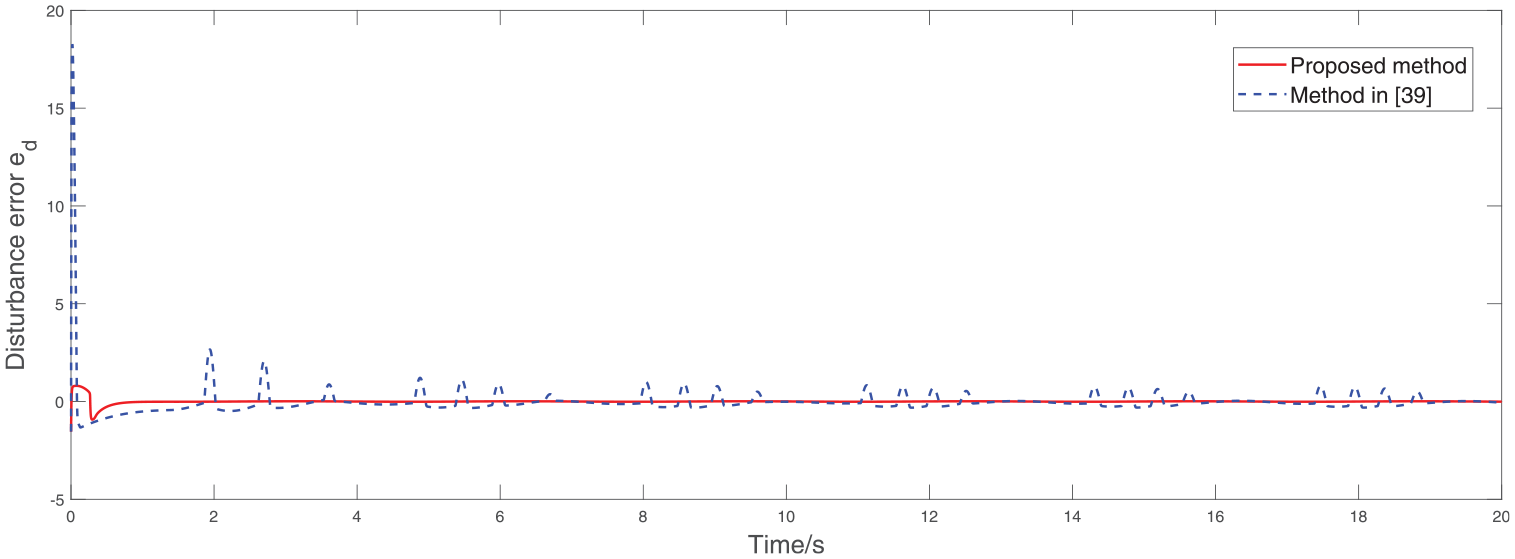
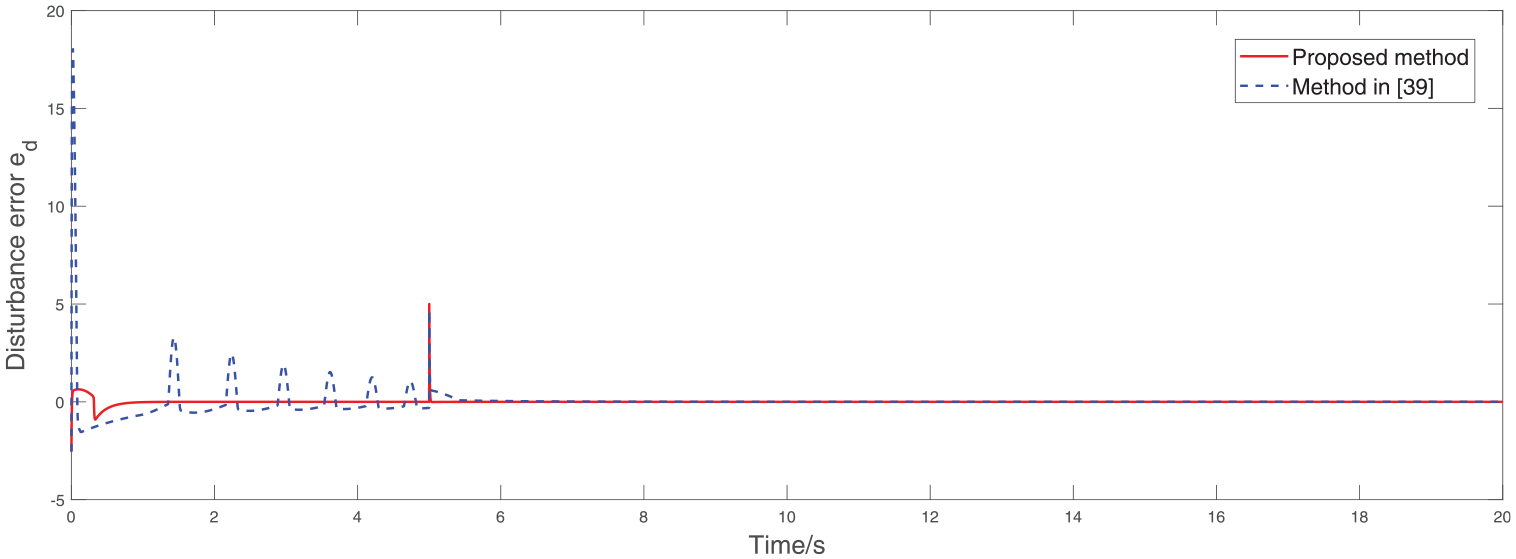
Disturbance error
Disturbance actual value
Disturbance error
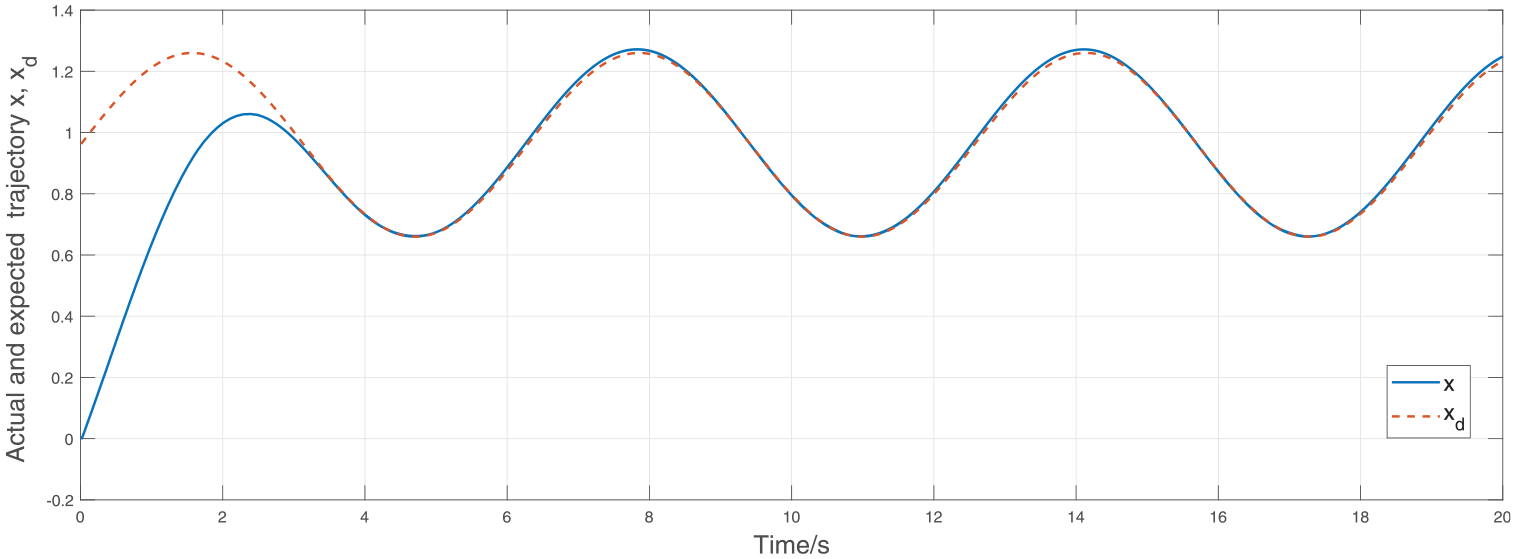
Output signal tracking effect.
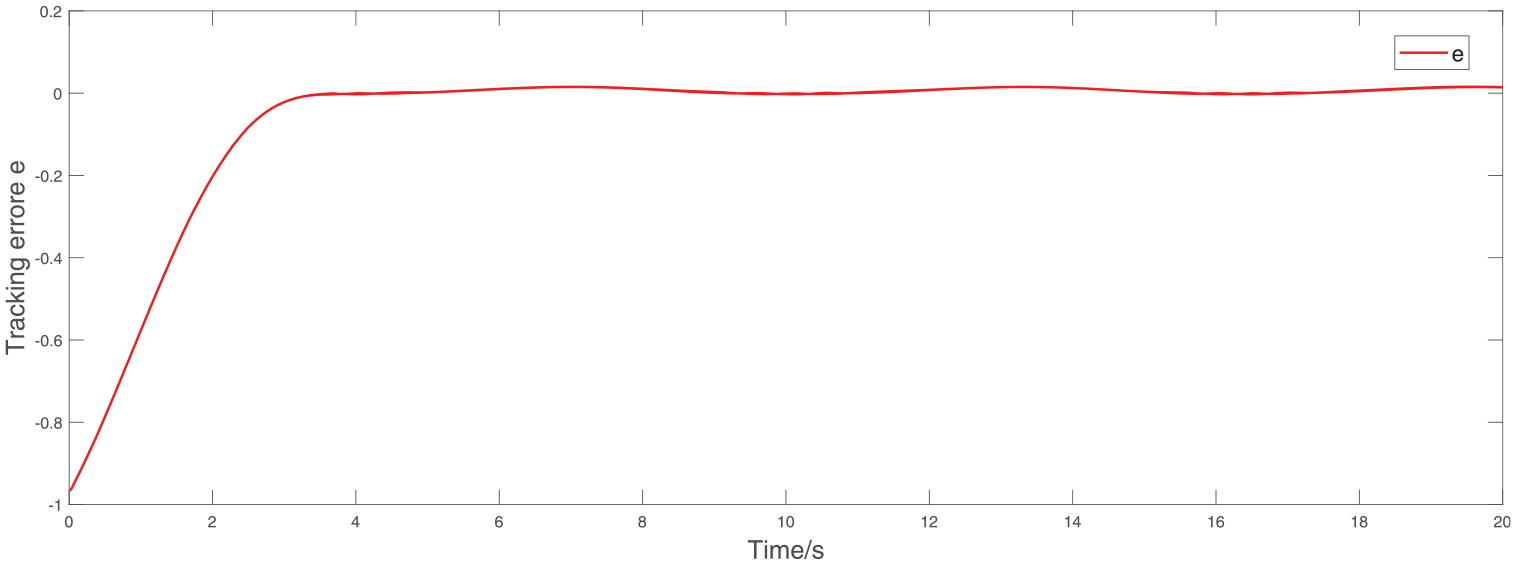
Output signal tracking error
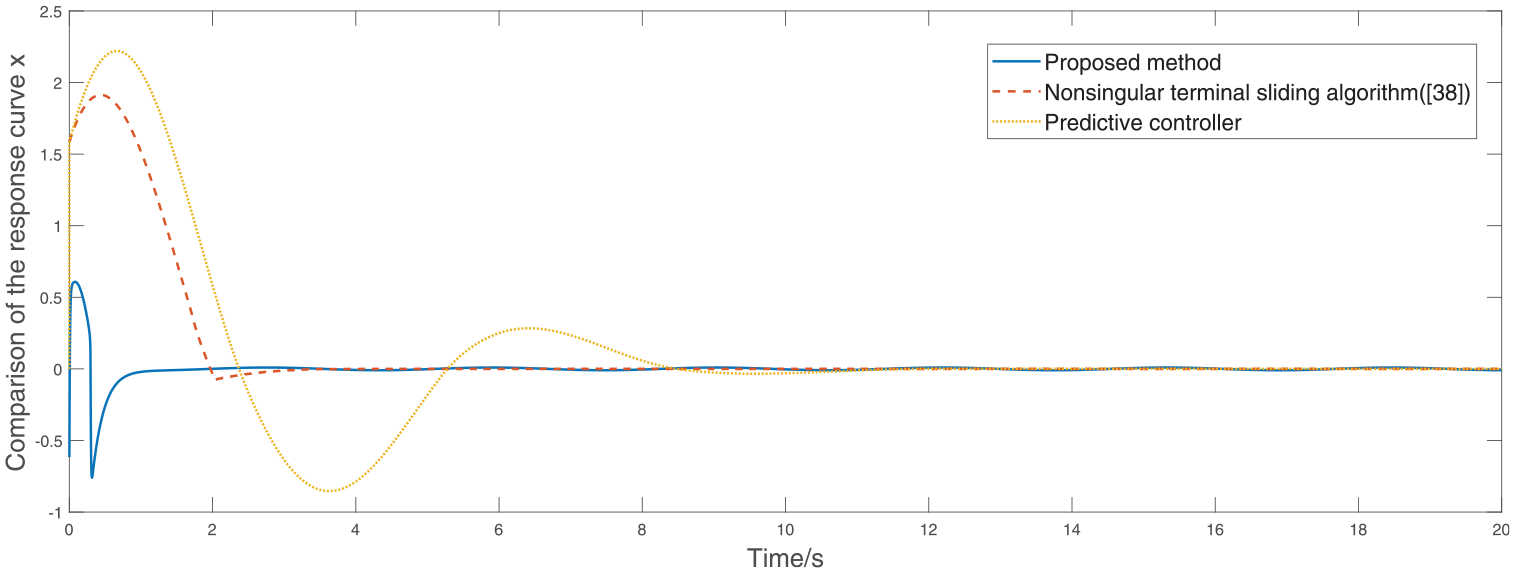
Comparison of response curves under three methods.
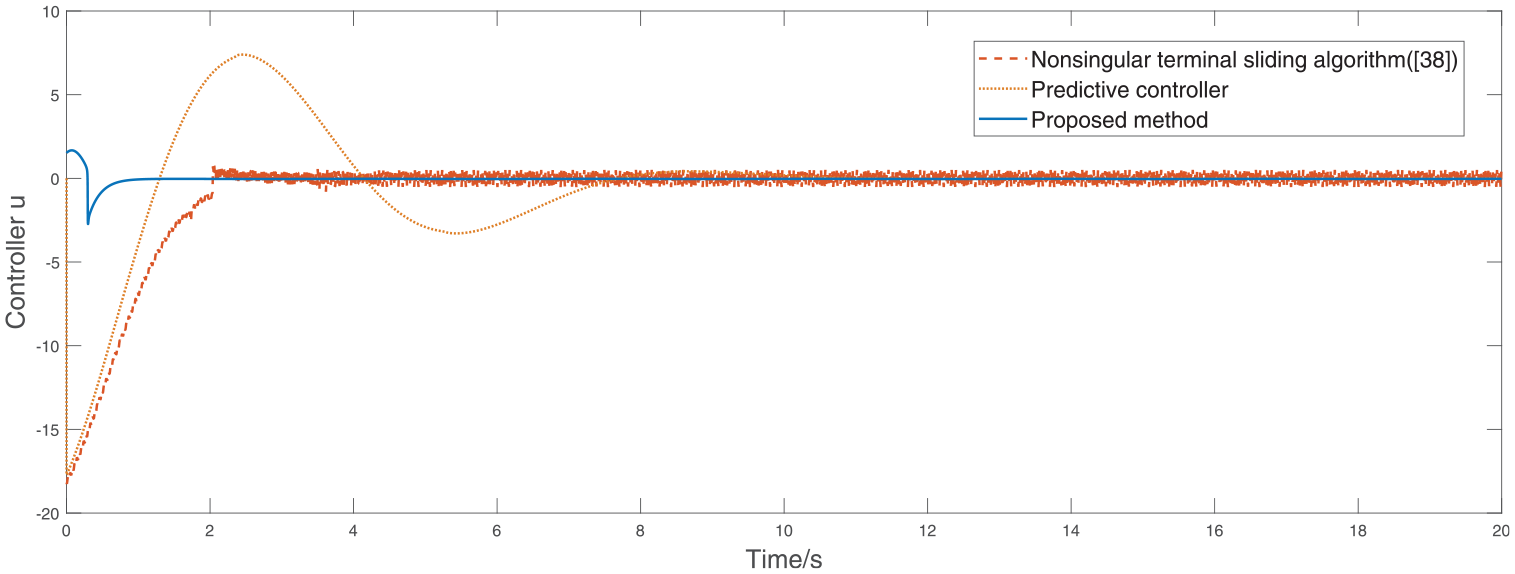
Three methods of control input u.
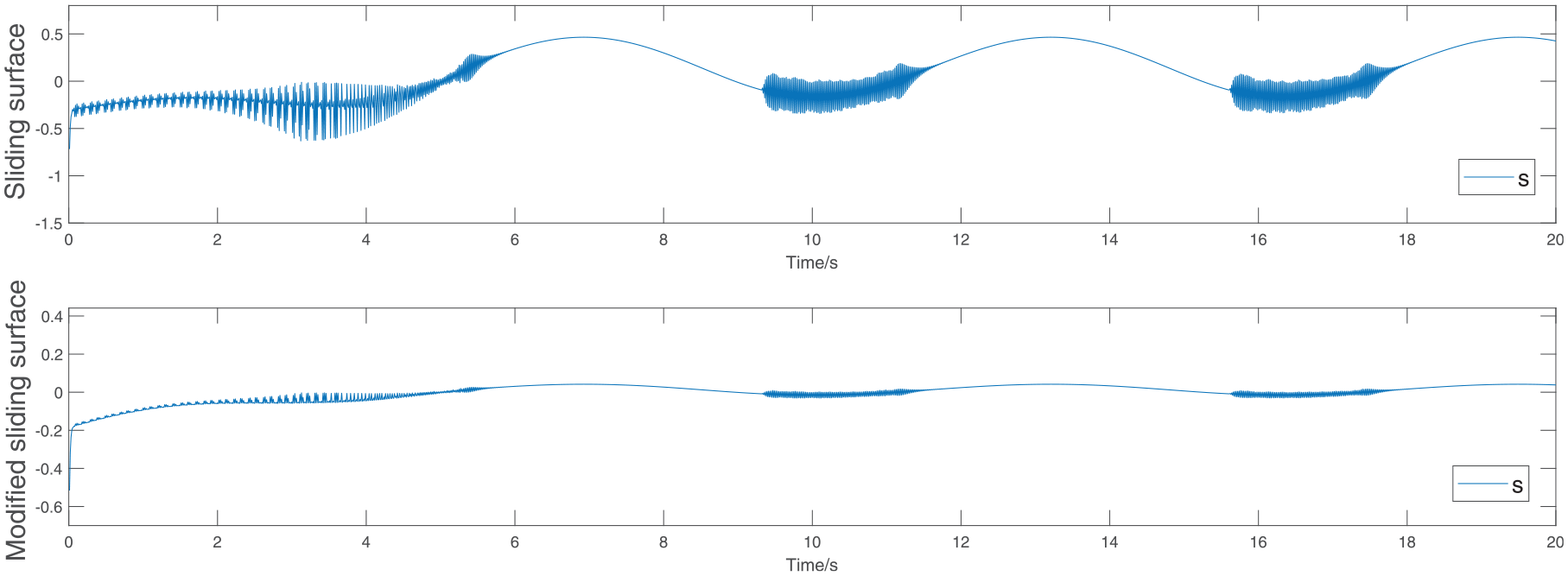
Sliding mode surface and super-twisting sliding mode surface
The first is the DOC simulation effect, and the simulation diagram is shown in Figures 3 to 6. The following two examples show that when the system (14) has external disturbances, the designed disturbance observer (15) can well observe the disturbances. By changing the observation gain, different external disturbance values can be estimated, so as to compensate the error estimation to the system (21). At the same time, compared with the sliding mode control method proposed in Refs.,38,56 the experimental results show that the controller proposed in this paper has better effect.
By contrast, when the system adopts sliding mode controller with time delay, the response speed of the system is close, but the dynamic performance is difficult to guarantee and chattering phenomenon exists in steady state. When the control gain
In contrast, when the control gain
The influence of input delay on PLI system is also considered in this paper. Considering that the PLI robot is susceptible to the input delay, the delay time t = 1 s and the system gain a = 1.2 are set in this paper. From the experimental results, it can be concluded that with the help of the proposed AST-SMC, the system (16) can achieve fast and accurate trajectory tracking under the influence of input delay that is, the tracking error converges to 0 in finite time.
According to the simulation results, under the influence of one-second input delay in the system, the output signal tracking error e is shown in Figure 8, and the output signal tracking error quickly converges to zero in less than 4 s.
As can be seen from Figure 9, AST-SMC has more stable performance and shorter response time compared to nonsingular terminal sliding algorithm and predictive controller. Although these methods can achieve finite-time convergence, the results of terminal sliding mode control and predictive control have greater delay.
Due to the improvement of the controller effect shown in Figure 10, compared to the terminal sliding mode control controller, the designed controller greatly reduces the chattering of the controller, improves the adaptive performance, avoids the problem of excessive loss of the controller, and has faster response speed and better convergence performance.
AST-STM Figure 10 shows the basic first-order sliding mode surface and the proposed super-twisting sliding mode surface. The results show that the chattering amplitude obtained by the super-twisting control method can be significantly suppressed. Moreover, simulation results show that the combination of adaptive SMC and super-twisting SMC can achieve better results, which can make the PLI system with system uncertainty and input delay realize tracking control and chattering suppression.
Conclusion
The finite time control of PLI robot with external disturbance and input delay is studied in this paper. EML model was established based on scheduling variable, turning the underactuated nonlinear problem into linearization at the nominal equilibrium point, and expanding the scope of the operation of PLI closed-loop system. Considering the behavior of PLI robot under the action of external nonlinear disturbances, the disturbance observer control (DOC) is designed to overcome the infeasibility of calculation of the original model. In order to achieve fast convergence and continuous control, the super-twisting sliding mode control (ST-SMC) method is proposed to decrease chattering in the control law. The closed-loop stability of the controlled system is verified by Lyapunov theorem. Finally, the simulation results show the feasibility and effectiveness of the proposed control scheme. The combination of ASMS and AST-SMC can achieve the purpose of reducing the amplitude of control gain and suppressing chattering while maintaining fast and accurate trajectory tracking.
On the basis of this paper, future research will focus on the effective compensation of fast time-varying disturbances and the control subject to both input and state delays in order to close to the real working environment, so that the system can execute quickly and accurately under variable and complex external interference.