
Abstract
In practice, many systems are affected by mismatched disturbances, which do not satisfy the match condition. This study focuses on a variable gain super-twisting sliding mode controller that achieves global robust fixed-time stabilization of second-order systems with matched and mismatched disturbances without disturbances observers. The proposed controller and the sliding variables adopt a state-dependent variable exponent coefficient, which improves the robustness properties of a sliding surface and switching control law. At the same time, the control strategy alleviates the chattering phenomenon by using the variable-gain super-twisting algorithm. The settling time is calculated a priori by the Lyapunov method. Simulation results show that, compared with recently published controllers, our proposed control strategy can suppress the mismatched disturbance more rapidly, simply, and effectively.
Keywords
Introduction
In engineering practice, control systems suffer unknown disturbances between real-time plant dynamics and their mathematical model, which deteriorate closed-loop control performance and even destroy system stability. The main unknown disturbances in the system are unmodeled dynamics, parameter perturbations, and exogenous disturbances. According to whether the disturbances enjoy the matching condition or not, they can be divided into matched and mismatched disturbances. Matched disturbances1,2 are the most common disturbances encountered in control applications and are handled in the state equation by a control input. Conversely, the mismatched disturbances3,4 are difficult to eliminate because they are not present in access channels to cross-coupling and interconnection states. Our challenge is designing robust controllers to eliminate mismatched disturbances in systems.
To achieve the desired closed-loop performance, we need to design a robust control algorithm for mismatched systems. The authors solve the problem of estimated and compensated mismatched disturbances by using observers; for instance, disturbance observers,5–7 and extended state observers.8–10 However, it is difficult to design a low-pass filter Q(s) in the disturbance observer, and the extended state observer only handles the slowly varying disturbances. The above approach also increases the complexity of controllers and computational costs. Research groups take advantage of the robust properties of variable structure control to reject mismatched disturbances, such as backstepping methods, 11 and methods based on sliding mode control (SMC).12–14 Backstepping control possesses excellent performance for high-order nonlinear systems with disturbances, together with adaptive control, 15 observer,16,17 which increases the complexity of the design. To enhance the robustness properties of the controller, the shorter settling time (i.e. the time that dynamical systems reach their equilibrium point.) is a must. In recent years, finite-time stabilization,18–21 and fixed-time stabilization,22–25 using a terminal sliding mode control (TSMC) provided by the nonlinear sliding surface have received much attention. Fixed-time stability pre-sets an explicit upper bound on the settling time that is independent of the initial conditions. Compare to asymptotic stabilization and finite-time stabilization, fixed-time stabilization provides a faster convergence rate, higher accuracy, and a stronger anti-disturbance ability for a variety of systems. A new second-order fixed-time sliding mode controller without disturbance observers has been used to reject mismatched disturbance. However, these methods are all based on SMC and inevitably produce high-frequency oscillations (i.e. so-called chattering), which is an inherent drawback of SMC. 14
The main reason for the chattering phenomenon of sliding mode control is the discontinuous control input, and a higher-order SMC approach can solve this problem effectively. Levant has proposed a continuous second-order sliding mode super-twisting algorithm (STA) to suppress chattering. But the perturbation bound is known in advance and the gain is constant. 26 Moreno et al. have developed a time-varying gain super-twisting algorithm (VGSTA) with gradient-bound gains adjusted. 27 The VGSTA precisely compensates the disturbance with variable gain following, when the disturbance prior is unknown and allowed to grow as a function of time and the state variables. VGSTA improves the robustness of the system and realizes the dynamic control input, which is desired for engineering applications. A practical fractional-order VGSTA has been proposed to improve the tracking performance of wafer stages for semiconductor manufacturing. 28 A finite-time convergence TSMC with VGSTA as the reaching law of an active fault-tolerant scheme has been developed for multi-robotics systems in the presence of actuator faults. 29 But the current methods, the STA and VGSTA are finite-time stable and have never been used to suppress mismatch interference. 30
This study proposes a global robust fixed-time stability super-twisting sliding mode control (FXSTSMC) method for second-order systems with matched and mismatched disturbances that without disturbance observers. By adopting the SMC strategy, the state-dependent variable exponent coefficients were used in the sliding surface and the controllers, and the system obtained robust global fixed-time stability of the state variable error with robust fixed-time stability of the sliding variable
(1) The proposed new super-twisting sliding mode controller of the mismatched disturbances system is robust globally fixed-time stabilization and has a shorter convergence time than other similar methods. Compared with the literature, 14 the proposed method converges to the origin about 0.2 s faster.
(2) The variable-gain super-twisting switching control law suppress chattering more effectively. In comparison to the literature, 14 the proposed control method cuts the input magnitude and frequency in half.
The rest of this paper is organized as follows: the preliminaries of the theory used in the paper in Section 2; a dynamic model of the motor drive system with uncertainties in Section 3; the fixed-time stability super-twisting sliding control design in Section 4, the simulation in Section 5 to verify the effectiveness of a fixed-time sliding mode and super-twisting control; the conclusion is presented in Section 6.
Preliminaries
Consider the following common differential equation
with
Definition 1 22 : The system (1) is globally fixed-time stable, the following two conditions must be met:
System (1) is globally finite-time stable;
The setting-time
Lemma 1
14
: The function
Notation: Introduce the following denotation
Dynamic model of the motor drive system with uncertainties
Consider the dynamic model of the drive system described by following second-order differential, the motion equation can be expressed as follows:

where
The friction model is the approximate piecewise linear friction model that can be written as follows,
31
so combine the load, the

Substituting (3) into (2), the system dynamics become

with
Considering model uncertainties of friction parameters in different states

where
the mechanical dynamics can be rewritten as

Consider the second-order drive system with

If we choose the state variable as
where
FXSTSMC design
In this section, a FXSTSMC method is proposed for the dynamic system (8). The system state could track the desired trajectory quickly and accurately, and the convergence time is bounded by a constant regardless of the initial system conditions.
Define
The controller design
The main objective of this subsection is to design a fixed-time stability super twisting sliding mode controller with the sliding surface, equivalent control, and variable super-twisting switching control law shown in Figure 1.
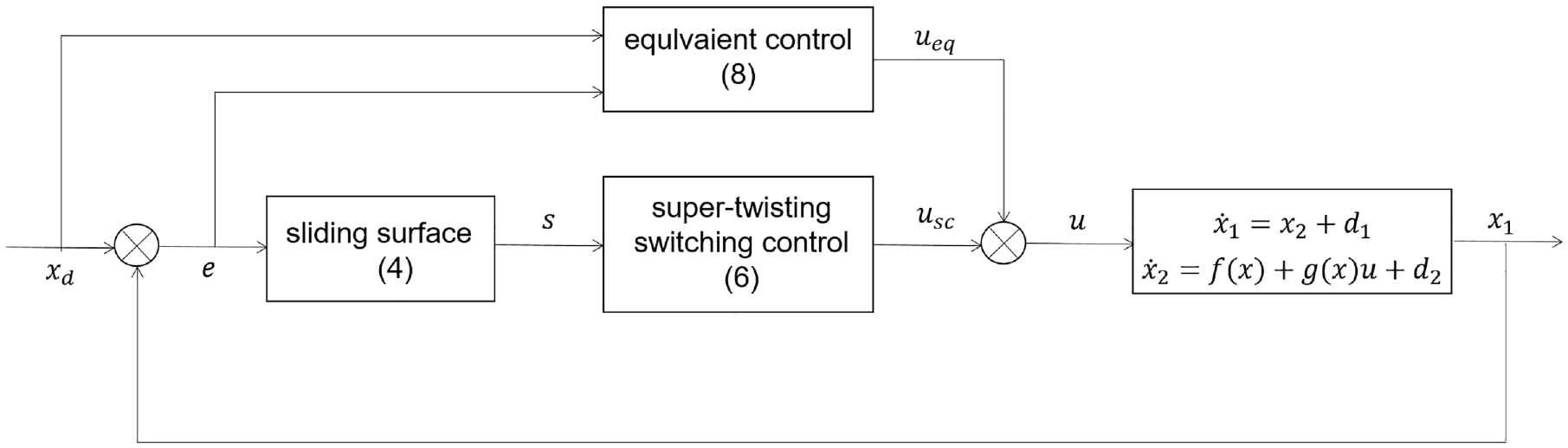
Block diagram of the proposed controller.
Consider the sliding surface by using the track error variable exponent coefficient given.

with
As shown in Figure 1. we designed the sliding mode control law written as

where
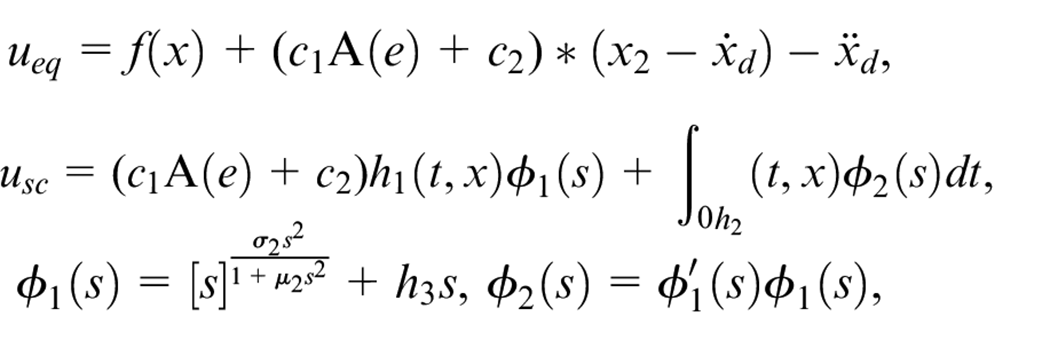
The equivalent control

In order to avoid chattering, a second-order super-twisting algorithm with a continuous function of the sliding variable and the integral of the discontinuous time derivative of the sliding function has been developed for the systems with relative degree one. Thus, the super-twisting control not only ensures all the main properties of the first-order sliding mode control but also that the control effort is continuous. The variable gain super-twist algorithm further improves the chatter phenomenon as the gain can vary with perturbation.
A novel fixed time stable variable gain super-twisting switch control law is proposed, that is, faster compensation for gradient boundary dependent state perturbations with variable exponential of sliding variable. The mathematical representation is addressed as
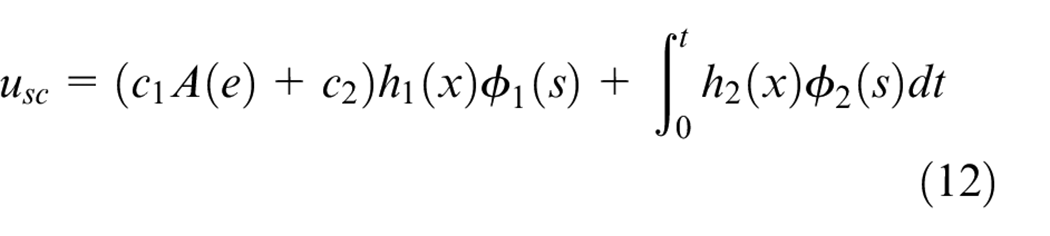
where,
with
and
The switching control law
Remark 1: For the plant with matched and mismatched disturbances, the designed sliding surface (9) with a variable exponential coefficient guarantees a fast response, which is used for precision and stability. The designed switching controller (12), (13) uses a novel structure of the variable gain super twisting algorithm to converge fast and steadily. The variable-gain super-twisting structure by power function also has an advantage over the traditional super-twisting for variable disturbances. Figure 1 and equivalent (14) show that
Stability and convergence analysis
This subsection will analyze the globally fixed-time stability and convergence time of the FXSTSMC in the system (8).
Substituting (10) into (9), The dynamics derivative of
The equation can be rewritten as
with
and
Based on (16). Assumptions 1 and 2, we obtain that

where,
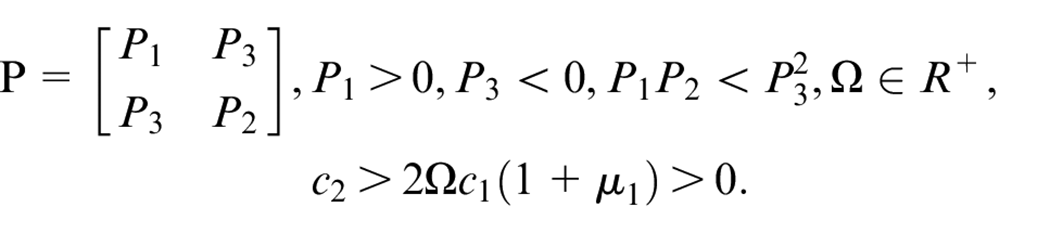
Theorem 1: Based on Assumptions 1–3, the second-order closed-loop system (8) with control input (10) is globally stable, and the sliding variable s will converge to the origin if the gains of the controller (13) satisfy as
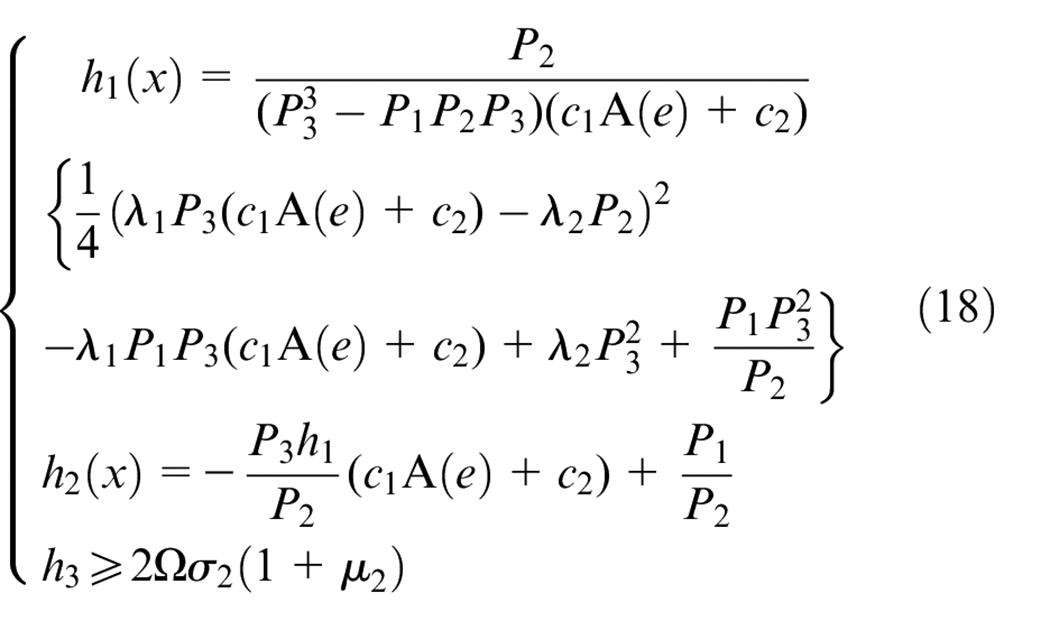
with positive matrix
Proof: We can rewrite the (16) as
Define a strict Lyapunov function with a quadratic form

as

where
By substituting (21) into the derivative of the Lyapunov function, we have
where,
and
Substituting (18) into
From Assumption 1 and Assumption 2, we rewrite equation (10) as follows,
From Lemma 1 if
And the symmetric matrix
so
To further analyze
(1)
According to the power function curve, it is easy to see
(2)
In this range
In summary, if all the coefficients satisfy Theorem 1, the
Theorem 2: Based on Theorem 1, the second-order closed-loop system (8) is globally fixed-time stability and the settling time satisfies the following inequality:
with
Proof: The SMC uses an appropriate controller to ensure the dynamical system constraint on the sliding surface, and then the system trajectories slide toward the equilibrium point. Therefore, the settling time for two cases is considered separately.
First, consider the system state of sliding motion on the sliding surface, that is,.
From (9),

Choose the following Lyapunov function candidate:

In according with (7), the derivative of (28) is

1.
Consider the case thus
It follows that

For
Let
2.
Consider the case, denote
It follows that

For
Let
Combine the above two periods (33) and (37), start at
Secondly, we consider the sliding variable state starting at the initial state
The
while
In according with (39), (40), the derivative of (22) is

Using (19), then (35) yields,

The Lyapunov function is Euclidean norm
Let
In the closed-loop system (8) with the controller from (10) to (14), from (45) the system starts at the sliding variable initial state
Simulations results
Sliding surface comparison
The first to investigate the proposed sliding surface with simulations. For comparison, the simulations about the tracking error on the four sliding surfaces. According to the literature,25,30 the formulated as follow: Proposed fixed-time terminal sliding surface (FTSS) (9), the conventional linear sliding surface (LSS)
From Figure 2(a), it is apparent that the tracking error on the LSS convergences to the equilibrium point at a prolonged rate. The tracking error on the ISS converges fast, but the trajectory is with a rather significant overshoot, and it takes a long time to converge. The TSS, its trajectory converges faster than ISS, and it has a much smaller overshoot. However, the above three schemes can not restrain the disturbance well. The trajectory of the sliding variable can be clearly seen in the enlarged Figure 2(b). As for our proposed sliding surface, tracking error converges the fastest, has the smallest overshoot, and is the least sensitive to disturbances.
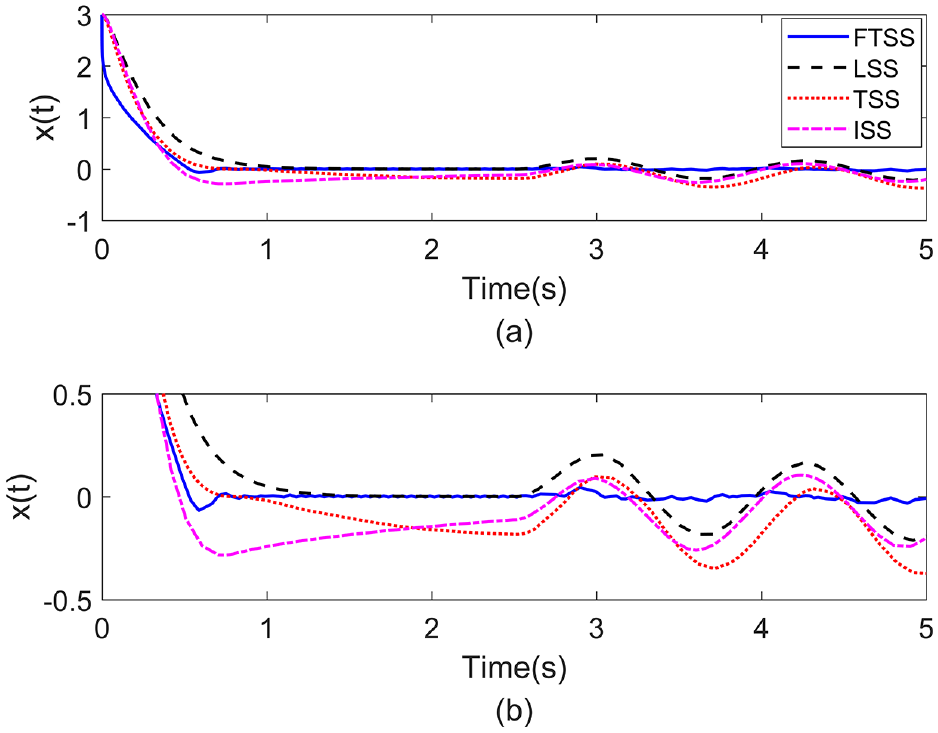
(a) State variable
The second is to investigate the proposed sliding surface that converges in the fixed time with simulations. In order to verify, the simulations about the tracking error on the proposed fixed-time terminal sliding surface (FTSS) (9) with different initial conditions. Consider
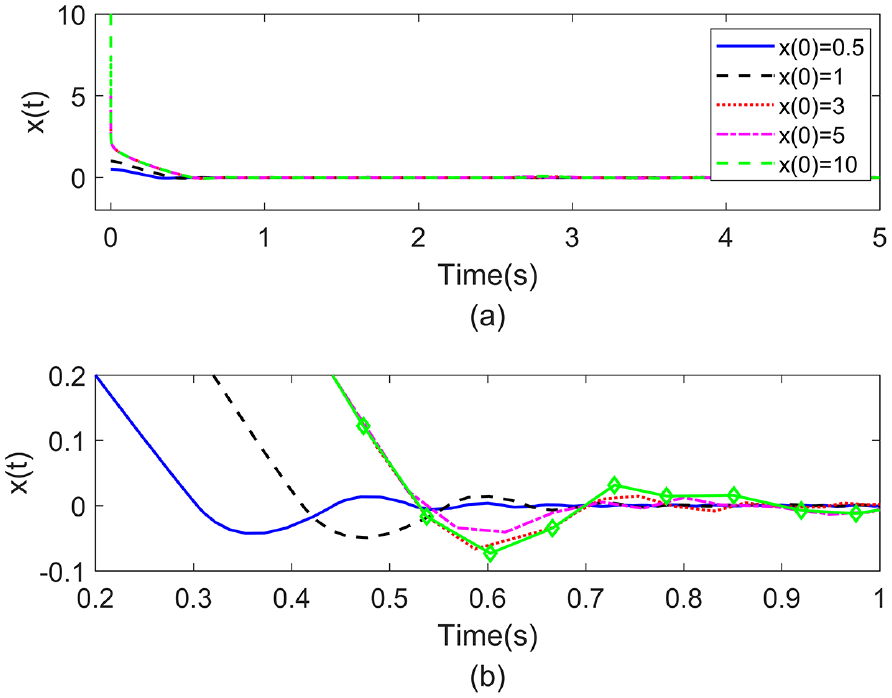
(a) State variable x(t) versus times with different initial condition and (b) enlargement of the top figure.
Control law comparison
This part to investigate the proposed control law with simulations. For comparison, select a sliding surface (9), with
The quantification of the control input is chattering suppression and system performance. As can be seen from Figure 4 since the sliding mode variables are the same, the moving time from the initial state to the origin of the sliding mode variables is similar, and they are not sensitive to the input of the control law. Figure 5 shows three different algorithms of control input. From Figure 5(a) it can be seen as a whole that although the second-order sliding mode input can not completely eliminate chattering, but the amplitude and frequency are improved. The Figure 5(b) reflects the process of the state variable on the sliding mode surface without disturbance. At 0.2–0.3 s, the first-order sliding mode control input has obvious chattering, and the amplitude is large. The Figure 5(c) reflects the effect of adding the disturbance on the control input. It can be seen that the method proposed in this paper is better than the other two methods in amplitude and frequency. Therefore, it can be proved that the second-order sliding mode is more effective to improve chattering than the first-order sliding mode control input and constant gain super-twisting.
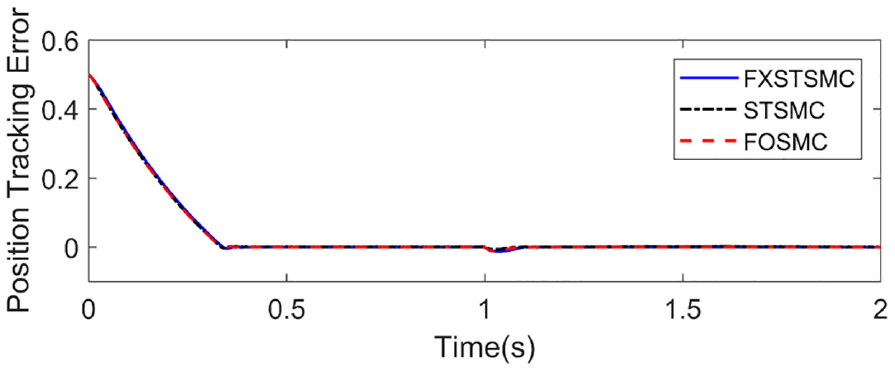
Position tracking error versus times with different switching control law.
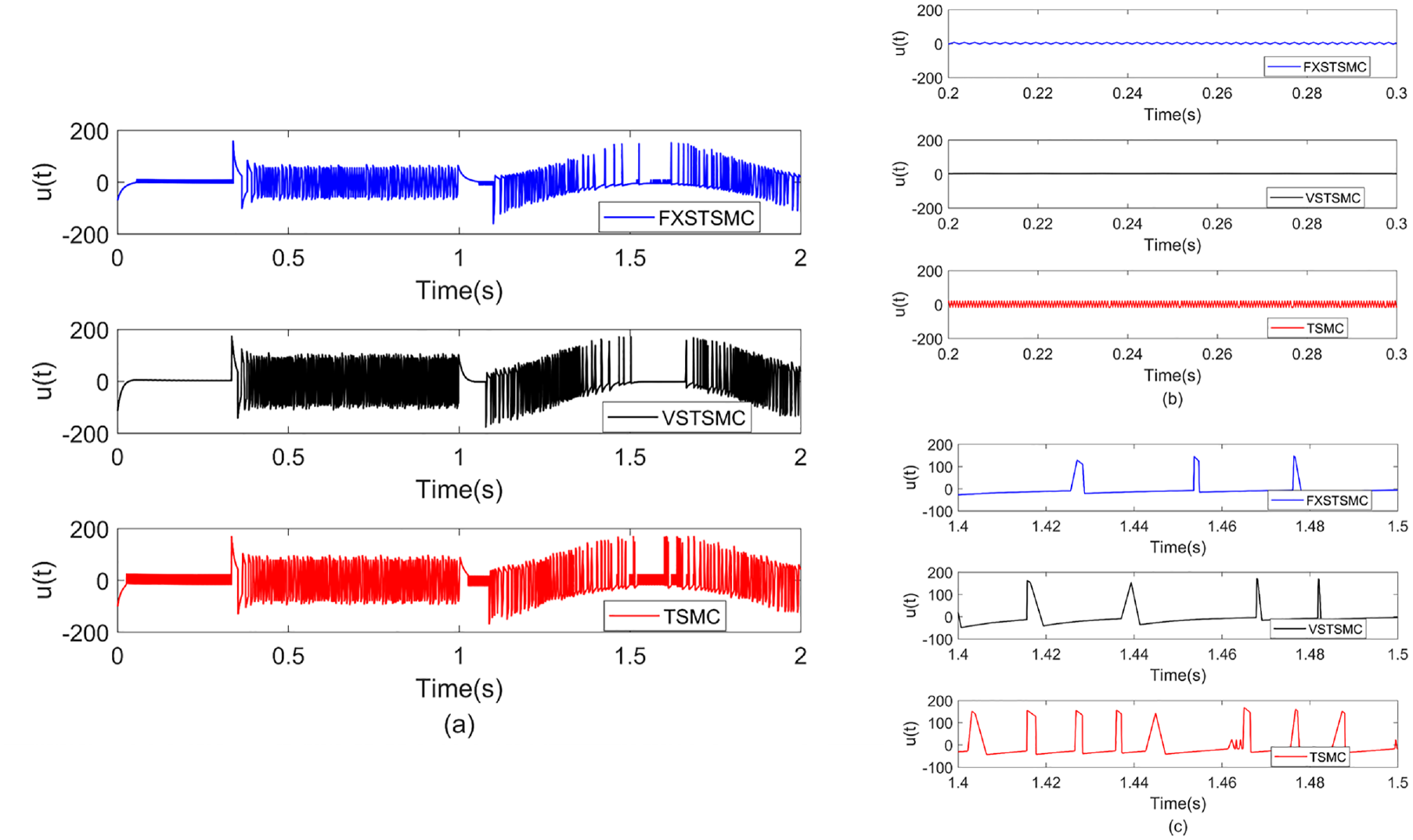
(a) Control input u(t) versus times with different switching control law, (b) between 0.2s and 0.3s the control input u(t) with different switching control law and (c) between 1.4s and 1.5s the control input u(t) with different switching control law.
Controller comparison
In this section, the numerical simulation results verify the effectiveness of the proposed scheme for tracking position and speed in a second-order system (8) with matched and mismatched perturbations. In addition, the convergence time and the chattering effect of the closed-loop system (8) are analyzed. To make the results more convincing, we compared three other schemes recently proposed by scholars to show the advantage of our method. The four controllers are listed as follows:
Case 1: fixed-time super twisting sliding mode control (FXSTSMC)
sliding surface:
controller:
the parameters choose:
Case 2 14 : Theorem 2, fixed-time sliding mode control (FXSMC)
sliding surface:
controller:
The parameters:
Case 3 33 : Theorem 1, linear sliding mode control (LSMC)
sliding surface:
controller:
The parameters:
Case 4 34 : backstepping sliding mode control (BSMC)
sliding surface:
controller:
The parameters:
In this simulation, taking
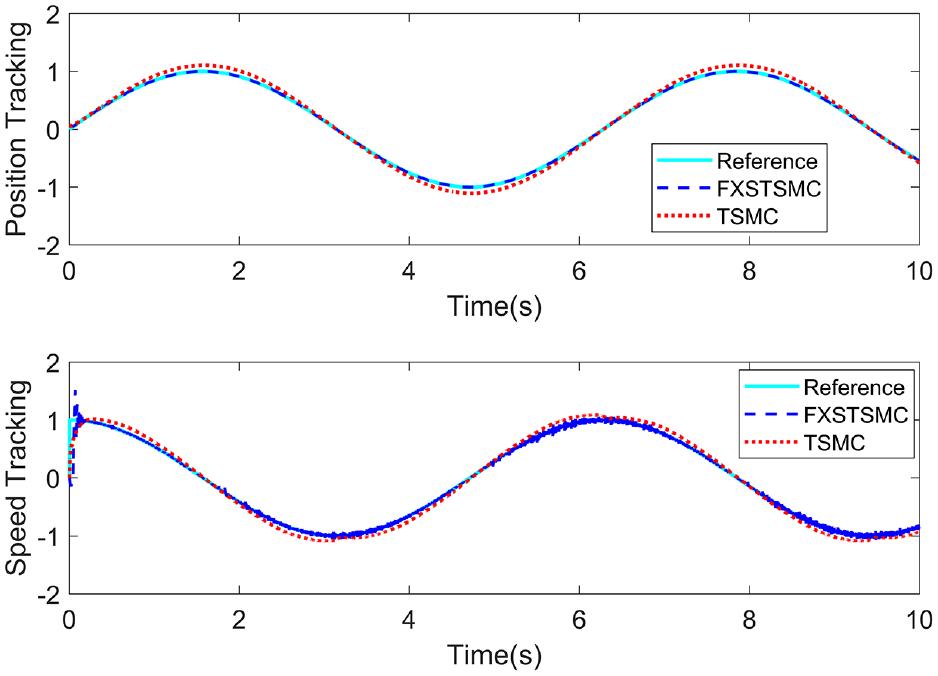
The simulation results for FXSTSMC and the other three different schemes are shown in Figures 6–8. Figure 6 illustrates the response of state variable position tracking and velocity tracking. Except for LSMC, other methods tracked the reference position signal in a short time. The speed tracking FXSTSMC method performed much better than the other three. According to Theorem 2, the settling time (26) is computed as
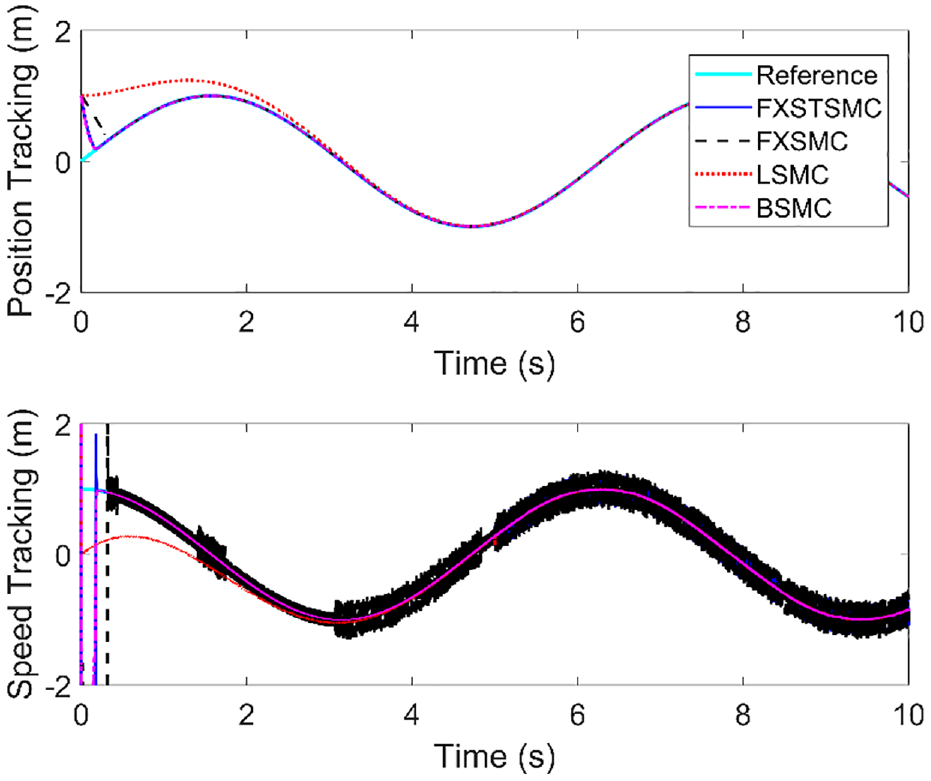
position tracking and speed tracking response.
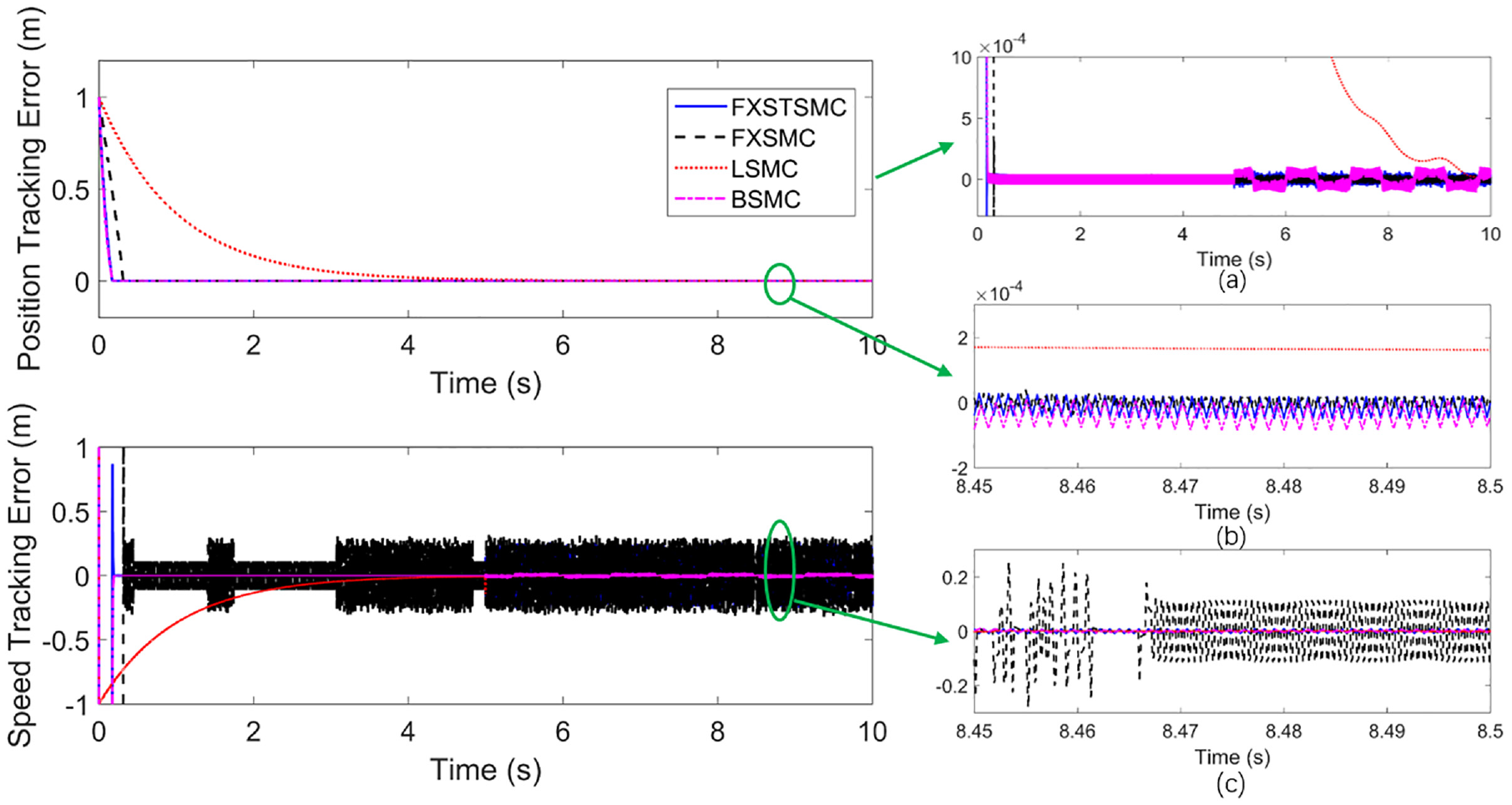
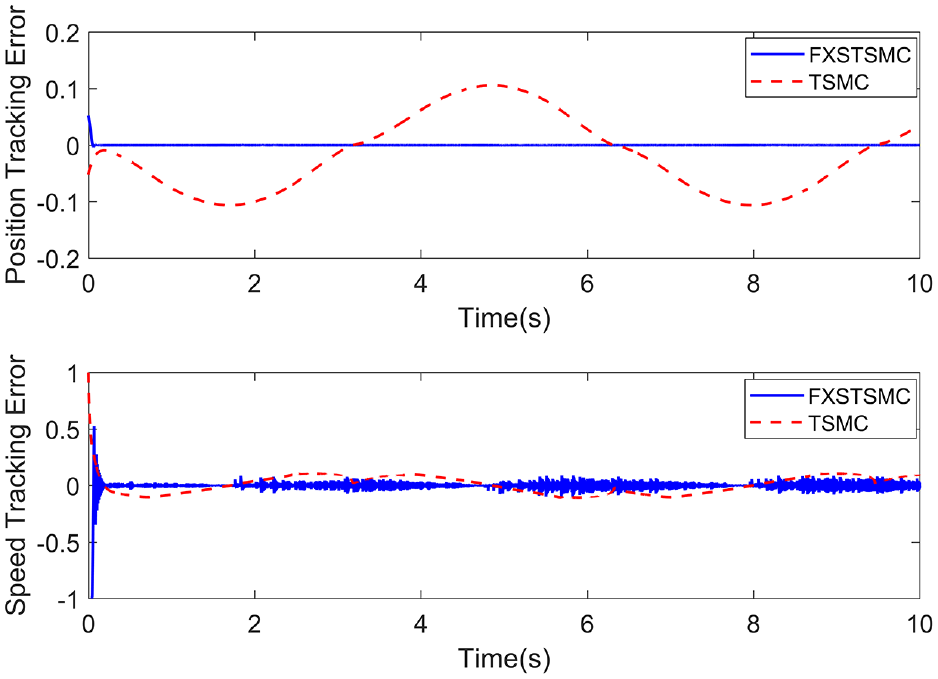
Position tracking error and speed tracking error: (a) position tracking error is magnified
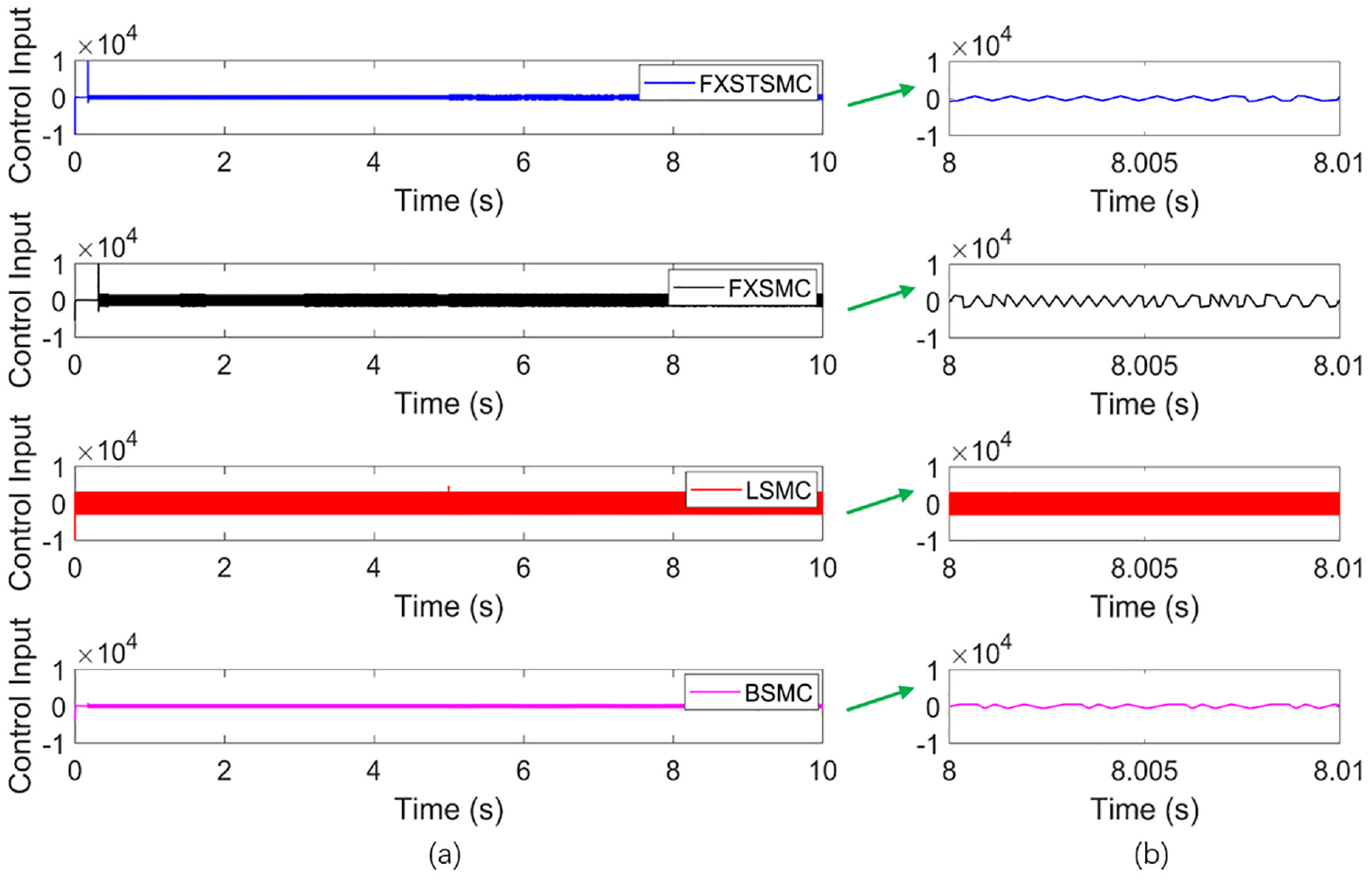
(a) Control input
Remark 2: The influence of four schemes on convergence performance is mainly caused by the different sliding mode surfaces. FXSTSMC and FXSMC both used sliding surfaces with variable exponent coefficients that not only tracked the reference signal in fixed time but also insensitive to matched and mismatched disturbances. The LSMC has a linear sliding surface, which makes the system converge asymptotically, and the speed is slow and cannot change rapidly with disturbance. The BSMC can speed up the convergence time by adjusting parameters, but it also causes the problem of low control precision and susceptibility to disturbance.
Compared with the four schemes, the control input and zoom-in figures of the four schemes can be seen in Figure 8, the control input magnitude of the proposed FXSTMC method is half that of the FXSMC method and one-fifth that of the LSMC. Although all four schemes inherit the chattering characteristics of the sliding mode control, the FXSTSMC scheme has less frequency of control input. The LSMC maintains a very high switching frequency from 8 to 8.01 s, and the frequency of the FXSMC is approximately more than two times that of the FXSTSMC. The result shows that FXSTSMC has better inhibition of the chattering effect.
Remark 3: The proposed method, the variable-gain super-twisting switching control law with a variable exponential function of the control gain is used, so that the gain of the control law could change rapidly with interference. In addition, the control rate inherits the characteristics of second-order function filtering, and the new control input is smoother.
Based on the above four control schemes of simulation, we find that the proposed scheme in this paper has the absolute advantages of a shorter settling-time, higher control precision, a better convergence effect, and smaller chattering when matched and mismatched disturbances occur. The system state converges to the origin in a fixed-time, which is impossible for linear sliding mode and traditional terminal sliding mode.
The FXSTSMC in simulations with practical systems
To verify the high performance of the proposed controller scheme, the FXSTSMC algorithm is applied to the simulation of two practical systems.
Example 1, the sliding surface, controller and results of Theorems 1 and 2 have been tested in simulation on a double integrator, that is,
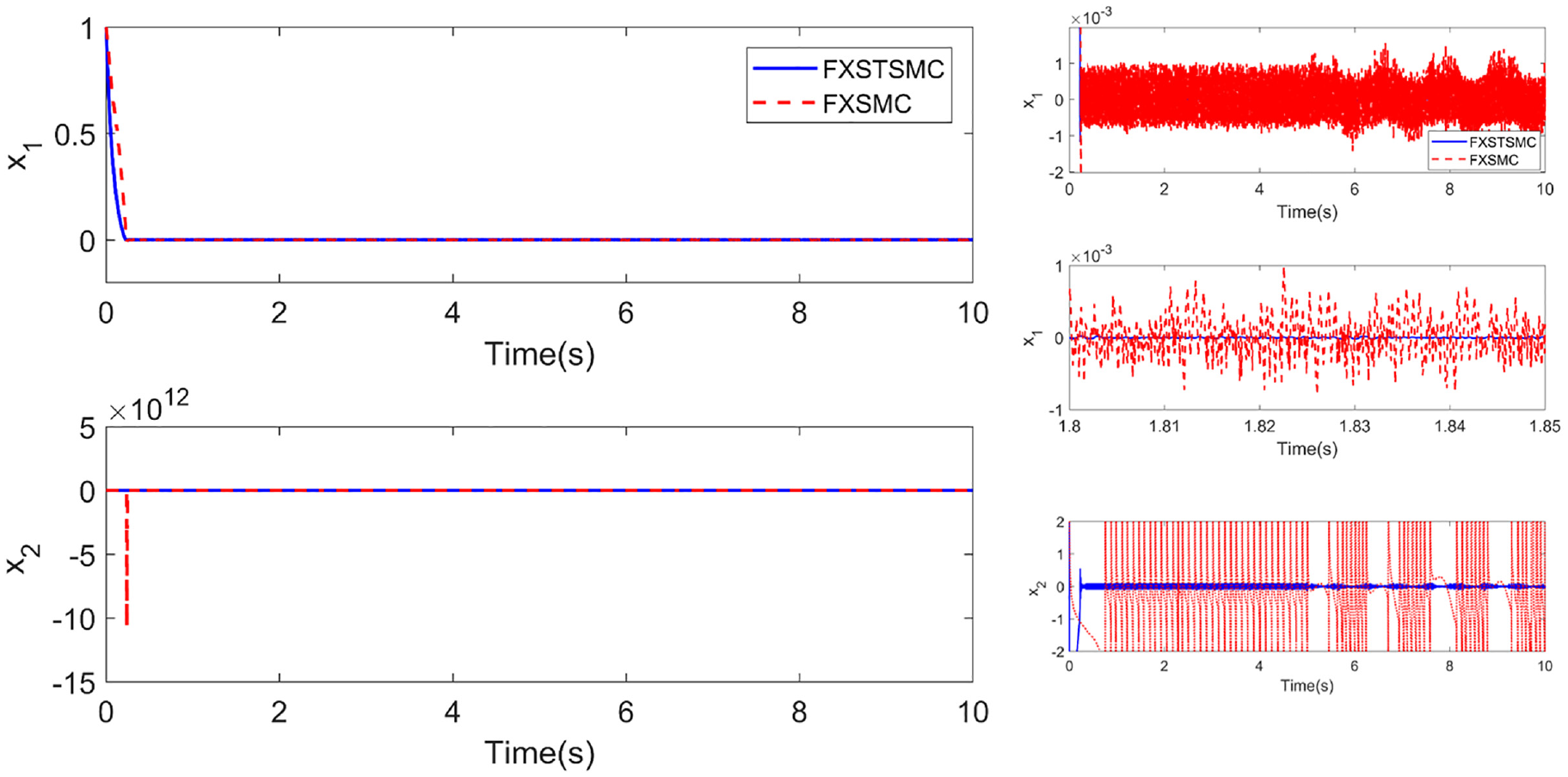
Double integrator with FXSTSMC and FXSMC.
Example 2. the sliding surface, controller and results of Theorems 1 and 2 have been tested in simulation on the single inverted pendulum (SIP) used by Zuo et al.
32
as a benchmark. Consider measuring error add mismatched disturbances, a bounded perturbation of the form
Position tracking and speed tracking of the SIP.
Position tracking error and speed tracking error of the SIP.
Conclusion
In this study, a fixed-time stability super-twisting sliding mode controller is proposed for a second-order system presence under unknown matched and mismatched perturbations. To design controller with robustness property and converge in a fixed-time, robust fixed-time stability sliding surfaces are obtained by using state variable variable exponential coefficients, and the variable gain super-twisting switching law is obtained by using a sliding variable variable exponential function. The stability analysis of the controller and the calculation of the upper bound of convergence time are all derived by Lyapunov method. The simulation results verify the superiority and feasibility of the FXSTSMC method, which achieved better control performance than the existing FXSMC, LSMC, and BSMC schemes in terms of convergence time, control precision, amplitude, and frequency of the control input. The proposed method is used for a fixed-time differentiator and a high precision fixed-time stability control. In future work, it is necessary to practice the controller in application.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the National Natural Science Foundation of China (No. 12273012), the National Key Research and Development Program of China (No. 2021YFC2203601), the Youth Innovation Promotion Association, CAS (No. Y202019), and the Operation, Maintenance and Upgrading Fund for Astronomical Telescopes and Facility Instruments, budgeted from the Ministry of Finance of China (MOF) and administrated by the Chinese Academy of Sciences (CAS).