
Abstract
This paper proposes a new integral-synergetic controller for direct reactive and active powers control (DARPC) for a grid-connected doubly-fed induction generators (DFIGs) in dual-rotor wind power generation applications. The proposed DARPC strategy employs integral-synergetic control (ISC) to regulate the reactive and active powers of the DFIG-based variable speed dual-rotor wind turbine systems. The proposed ISC technique is the contribution of this work, where this strategy is a development of synergetic control and simplicity and robustness are the most prominent features. The main advantages of the proposed ISC-DARPC technique are ease of implement, good dynamic response, simple structure, and constant switching frequency operation. The Matlab software is used to validate the design of the ISC-DARPC technique, and the obtained results are compared with traditional DARPC. In addition, the ISC-DARPC technique is able to fully minimize ripples in both torque and active power during grid voltage imbalance or parametric changes on the DFIG.
Keywords
Introduction
Direct active and reactive powers control (DARPC) is one of the most and largest existing methods of control for wind powers because it is a simple technique, easy and robust control compared to a field-oriented control (FOC) technique. 1 This strategy belongs to the family of linear strategies that depend on switching tables in order to generate control pulses in the inverter. The DARPC strategy produces fewer ripples for torque, current, and active power than both the direct and indirect FOC strategy. 2 Moreover, this strategy offers high performance with great efficacy in improving systems advantages much more than in the case of FOC strategy. 3 The DARPC strategy does not need to know the mathematical form of the system under study, which makes it provide a fast dynamic response and high performance compared to FOC and vector control, as this strategy was proposed as one of the best reliable solutions in systems that work with wind power (WP). 4 In general, the DARPC strategy is among the best strategies available at the moment with direct torque control (DTC). This strategy in principle and idea has the same principle as in the DTC strategy, where in the DARPC strategy both active and reactive power (Ps and Qs) are used as references.2,3 On the other hand, the traditional DARPC strategy with a lookup table is introduced to the power control of the doubly-fed induction generator (DFIG), which decouples good performances in the WP systems. 5 However, the lookup table may not give satisfactory performances against parameter variations of the DFIG. The DARPC strategy with a lookup table gives more total harmonic distortion (THD) of voltage/current and more Ps and Qs ripples as a result of using two hysteresis comparators to control the power of generators. In Nafar and Mansouri, 6 the authors proposed the use of the DARPC technique applied to the DFIG-based WP system. However, applying this technique leads to large Ps and Qs ripples, THD of current, and variable switching frequency due to hysteresis controllers. 7 The DARPC strategy was designed to control the Ps and Qs of the permanent magnet synchronous generator. 8
Recently, several DARPC strategies law based on a DFIG are presented in literature such as neural DARPC strategy, 9 fuzzy DARPC control, 10 neuro-fuzzy DARPC strategy, 11 sliding mode-DARPC control, 12 DARPC strategy with classical space vector modulation (CSVM), 13 DARPC control with super-twisting sliding mode (STSM) controllers, 14 DARPC strategy with neural STSM controllers, 15 DARPC strategy based on genetic algorithm (GA), 16 DARPC strategy based on backstepping controller, 17 DARPC strategy based on terminal synergetic controller, 18 DARPC strategy based on third-order sliding mode controller, 19 DARPC strategy based on sliding mode controller (SMC), 20 and the DARPC control with neuro-fuzzy STSM controllers. 21 These proposed strategies to improve the performance of DARPC are multiple and differ from each other in terms of complexity, simplicity, and ease of implementation. Also, in terms of durability and results obtained. In all of the above strategies, all dispense with two hysteresis comparators and switching table with the aim of increasing the robustness of the strategy and overcoming the defects of the traditional strategy. But the use of these strategies increases the degree of complexity, as is the case in the case of using backstepping control and passivity control, and this is not desirable. In addition, some of these strategies used are related to the mathematical form of the system, which creates problems and defects in case the system parameters change, and this is undesirable. However, the synergetic control (SC) theory remains one of the best nonlinear controls that can be proposed as the best solution to overcome the disadvantages of the DARPC, as shown in the work done in Habib. 22 Compared to the SMC technique, SC technique is simple, uncluttered, and reduces chatter significantly. In Abdesselem et al., 23 the authors propose a new strategy of SC technique based on the derivative and integral of macro-variable. This new design is based on double-loop control to improve the effectiveness and robustness of the DFIG controlled by a FOC strategy. Due to the importance of the DARPC strategy, it has seen great interest among researchers, especially in the field of renewable energies, where they have tried to overcome its problems by using several strategies such as the use of nonlinear controls, smart methods, and hybrid strategies. In Habib and Nicu, 24 DARPC with SC technique has been introduced for DFIG-based dual-rotor wind turbines (DRWTs) because of its simple algorithm, robustness, and easy implementation. In Habib and Hamza, 25 the author designed the use of a DARPC strategy with a GA technique applied to the DFIG-DRWT system. Simulation shows the superiority of the designed technique. In Benbouhenni, 26 five-level neural DARPC was designed to command the DFIG-based classical wind turbine. In all, 12 sectors DARPC control structure reduced the THD of current compared to the conventional DARPC strategy. In Lin et al., 27 the DARPC control scheme was designed based on integral SMC to control a three-level inverter, where the traditional integral-proportional (IP) controllers were replaced by an integral SMC technique. The result shows the superiority of the designed technique. In Han and Ma, 28 a new adaptive-gain second-order SMC was proposed to improve the performance of the DARPC strategy of DFIG. The numerical results verified the robustness, effectiveness, and superiority of the proposed strategy. In Habib et al., 29 the author combined the SC and SMC strategies to overcome the disadvantage of the DARPC, where the combination of the two strategies showed high efficiency in improving the robustness of the DARPC of the DFIG-DRWT system, especially in reducing the Ps and Qs ripples. In addition, super twisting algorithm (STA) and SC technique in Habib and Lemdani 30 have been combined to improve current quality and overcome Ps and Qs ripples. The results showed the effectiveness of the combination of the two methods to overcome the disadvantage and problems of the DARPC of the DFIG-DRWT system.
In this paper, the focus will be on the SC strategy and an attempt to give it a new form to increase its efficiency and ability to improve the characteristics and advantages of the DARPC. So, this paper is a development and modification of the works done in Habib et al., 29 Habib and Lemdani. 30 To reduce the Ps and Qs ripples of the DARPC strategy, the use of a novel nonlinear technique is suggested in this work. In this work, a nonlinear technique based on the proposed integral-SC (ISC) is used to improve the quality of both the Ps and Qs of a DFIG-DRWT systems. The proposed control scheme takes into account the nonlinear nature of the variable-speed DRWT behavior, the flexibility of the drive train, and the turbulent nature of the variable-speed DRWT system. Moreover, the designed ISC-DARPC strategy law is robust against the DFIG parameter variations in the system.
This work presents the fundamental aspects of the ISC-DARPC strategy and presents pertinent simulation results for variable-speed DFIG-DRWT systems. The designed ISC-DARPC is compared with a classical DARPC strategy. In this work, by applying a proposed integral-SC theorem law for a DFIG system with pulse width modulation (PWM), the inherent complexity of designing the controller is removed. The original contribution of this work is the application of the designed ISC technique to regulate the Ps and Qs of the DFIG-based variable-speed DRWT system using the two-level classical PWM technique. The numerical results validate that the ISC-DARPC strategy has very robust control and gives a minimum THD of voltage and power ripple compared to the classical DARPC strategy. This represents a new robust and ripple-free DARPC strategy for DFIG-based variable-speed DRWT. However, the work carried out in this paper is completely different from several research works such as the work done in [29]29 in terms of the strategy used, the idea, the principle, and even the results obtained, which makes the technique suggested in this paper have future horizons as a solution among the solutions that it can be used in the field of the wind power.
The proposed ISC-DARPC technique controls the Ps and Qs of the variable-speed DFIG-DRWT to improve the characteristics and performance of the traditional DARPC technique and achieve the following results:
Improving the dynamic response of the variable-speed DFIG-DRWT system.
Improving the quality of Ps and Qs by minimizing the ripples of the current produced by the generator.
Minimizing the THD value of the stator current of the variable-speed DFIG-DRWT.
Increasing the robustness of the traditional DARPC technique.
Increasing the power gained from the wind.
This paper contains the following main sections: Section “Introduction” gives an introduction to this work, mentioning the contribution and the goal of this study. In section “Model of DRWT,” the mathematical form of the DRWT is briefly presented followed by the section “Model of the DFIG.” In section “Proposed ISC controller,” the designed integral SC theory is discussed. Section “Proposed DARPC-ISC strategy” dealt with in minutes the designed DARPC based on the ISC technique used in the power control. In section “Analysis and results,” the simulated results of the designed DARPC technique based on the ISC technique were presented and then compared with those obtained by the traditional DARPC technique, and finally all the conclusions reached from this work were collected in section “Conclusion.”
Model of DRWT
The use of wind power conversion systems has increased significantly in recent years. The applied systems of the WP can be classified into fixed-speed and variable-speed turbines. The variable-speed WP are as follows: the ability to achieve maximum power conversion efficiency which ultimately increases WP production and a significant reduction in mechanical stresses. In Yahdou et al., 31 a new WP is presented, where two wind turbines are used to produce mechanical energy from wind. This new technology is called DRWT or counter-rotating wind turbine. This new technology is the use of two turbines of different capacities and is located on the same axis and one turbine formation to convert WP into mechanical energy. However, this technology gives more mechanical energy than traditional wind turbines. In Habib et al., 32 the DRWT system provides about 20% to 30% more mechanical power compared to the mechanical power output of a traditional WP system. This technology has efficiency in the case of weak winds compared to the old technology. 33 DRWT system is not affected by the wind generated by the turbines in the case of wind farms compared to the classic turbines. But the disadvantage of this technology is that it is expensive, difficult to control, and contains many mechanical parts compared to traditional technology. 34 To control the DRWT the main turbine is used for this purpose, where the same strategy is followed as used in the classic turbines. So, maximum power point tracking (MPPT) is the strategy used to control the DRWT. The MPPT strategy depends on the use of a PI controller, and to implement this strategy, you must first know the mathematical form of the DRWT. The proposed generation system in this work, which is based on the use of DRWT, is shown in Figure 1, where DFIG is used to convert the acquired mechanical power into electrical power. In general, this proposed system greatly helps to protect the environment and greatly reduces the area of wind farms. The total aerodynamic torque obtained is the sum of the torques for each of the secondary and main rotors.
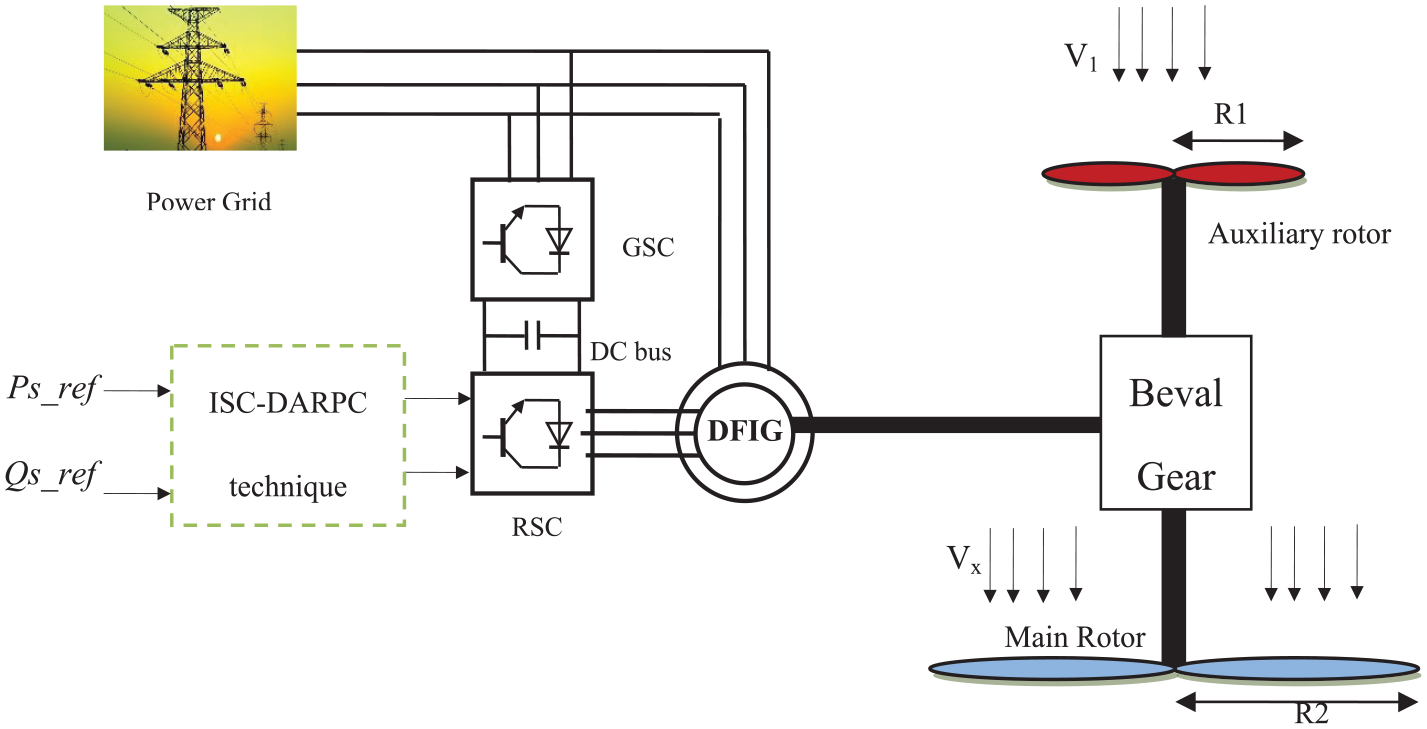
DFIG-DRWT system.
The aerodynamic torque of the auxiliary rotor (AR) is given: 31

The torque of the main rotor (MR) is given:

where λAR and λMR are the tip speed ration of the AR and MR, RMR and RAR are the blade radius of the AR and MR, ρ is the air density, and wAR and wMR are the mechanical speed of the AR and MR.
Equations (3) and (4) represent the tip speed ratios of the AR and MR, respectively:


where VMR is the speed of the unified wind on MR and V1 is the wind speed on an auxiliary rotor.
Equation (5) represents the total torque of DRWT system:

where TMR is the MR torque, TT is the total torque, TAR is the AR torque.
The essential element for calculating the tip speed ratio is wind speed on the auxiliary and main turbines. Obtaining the wind speed on the AR is straight forward. The wind speed on the MR is given: 31
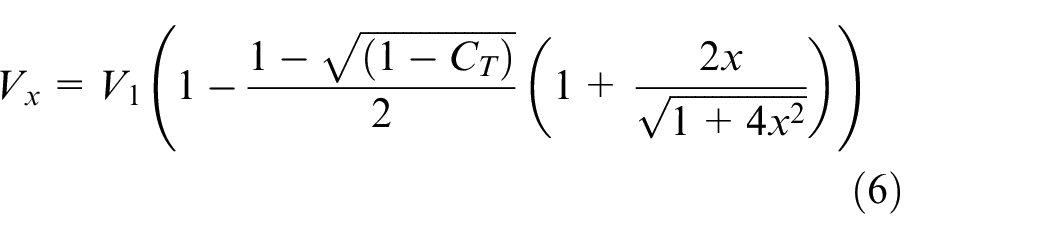
where Vx is the velocity of the disturbed wind between rotors at point x and CT the trust coefficient, which is taken to be 0.9; x is the non-dimensional distance from the auxiliary rotor disk. So, with respect to x=15 m, the value of the Vx close to the main rotor is computable (rotors are located 15 meters apart from each other). 35
Equation (7) represents the power coefficient of the wind turbine, where the power coefficient is related to the pitch angle (β):

Model of DFIG
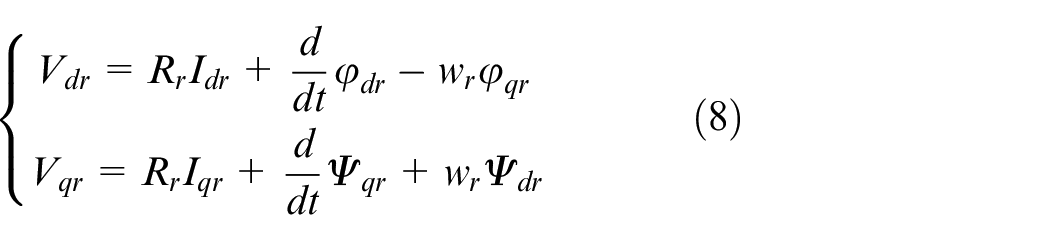
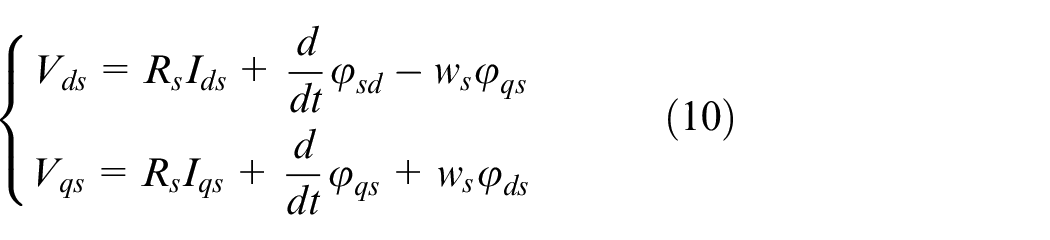
DFIG is among the most popular generator types in the field of WP system due to its many advantages such as durability, ease of control, and low cost.36,37 To accomplish the proposed work in this paper, the mathematical form of the DFIG must be given. To do this, the Park transform is used to give the DFIG a mathematical form. The stator and rotor voltages equation of the DFIG can be written in the reference frame of Park in the following form:38-42

Stator voltage and flux components:

Equation (12) represents the torque of the DFIG:

The power of DFIG is shown in Equation (13):

Equation (14) represents the mechanical model of the DFIG:

where J is the inertia, f is the viscous friction coefficient, Ω is the mechanical rotor speed, and Tr is the load torque.
Proposed ISC controller
During the last few years, several nonlinear strategies have been proposed to control electrical machines. The SC strategy is one of the novel techniques of nonlinear controller. It is characterized by its simplicity of design, external disturbance rejection capabilities, and the global stability assurance of the system. The SC is a technique quite close to the SMC in the sense that it forces the system to evolve with a dynamic pre-chosen by the designer. 22 This new strategy does not require the linearization of the model and explicitly uses a nonlinear model for the synthesis of the control. In Moati and Kouzi, 43 the authors suggested the use of a direct flux and torque control with the SC strategy applied to the dual stator induction motor drive, where the classical PI of speed was replaced by the SC strategy. In Qian et al., 44 the photovoltaic system was designed based on the SC strategy theory. In Ademoye, 45 the electric power system is designed based on the SC theory. SC theory and genetic algorithm are combined to control the wind turbine systems. 46 A power system with a superconducting magnetic power storage system was proposed based on the SC theory. 47 Yahi et al. 48 developed a speed controller for an induction motor based on the SC theory. In Zhao and Wang, 49 the authors proposed the use of SMC and SC theory to control the permanent magnet synchronous motor. The use of SC technique in the field of controlling electrical machines does not eliminate the ripples of torque and current, as the problem of current quality remains low and this is undesirable.
In this section, a novel idea of SC technique is presented, whereby an integral technique is used to improve the response of the SC technique. The designed integral-SC theory is different from the traditional SC technique used in papers.44–49 In works,44–49 the classic SC technique was used to control the photovoltaic system, power system, and wind turbine system, respectively.
The first step in designing an SC strategy is the formation of surfaces defined in terms of system state variables as the algebraic relationships between those variables that reflect the performances of the requirements of the system design. The equation of the surface for the SC strategy is given by:

The control will make the system to operate on the manifold Ψ(0)=0 and the dynamic evolution of the surfaces according to the equation is given by:

where T is the parameter of convergence speed of surfaces.
To ensure the stability of this functional equation, the function φ must satisfy φ(Ψ)Ψ > 0 for all Ψ ≠ 0.
Equation (17) represent the solution of Equation (16):

where T is the parameter of convergence speed of surfaces in the cas Ψ=0.
The integral-SC technique is a modified SC technique to improve the characteristics and robustness of the classical SC technique, where integration is added to the classical SC strategy in this way, the increase in efficiency and strategic effectiveness is ensured in improving the performance of systems, and in particular in improving the characteristics of the DARPC. The control law of the designed ISC strategy can be defined as follows: 24

where T1 and T2 are time coefficients for derivative and integration parts, respectively.
Figure 2 shows the proposed ISC technique. Through this figure, it can be said that the designed ISC is very simple and can be easily achieved compared to the rest of the nonlinear controls such as SMC or backstepping control. Also, this strategy does not require the mathematical form of the studied system, as it is applied directly without knowing the mathematical form or resorting to complex calculations, but only the surfaces must be known. This controller proposed in this work differs from several scientific works in terms of principle, idea, simplicity, and ease of practical implementation.50–55
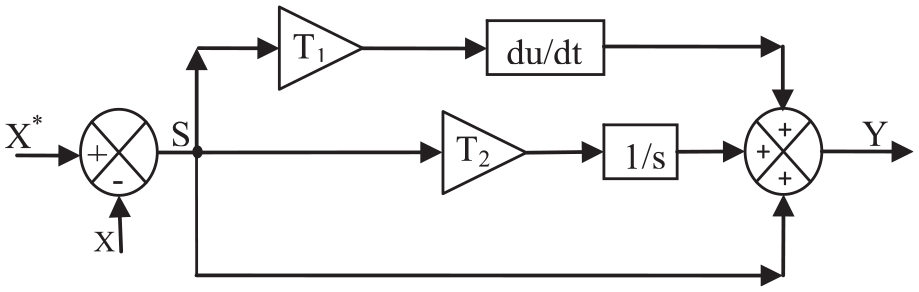
Structure of the ISC controller.
In this work, the designed ISC technique is applied to improve the quality of the output current from a generator placed in a DRWT system. But also to reduce the ripples for torque, current, and powers Ps and Qs of the DFIG-DRWT system.
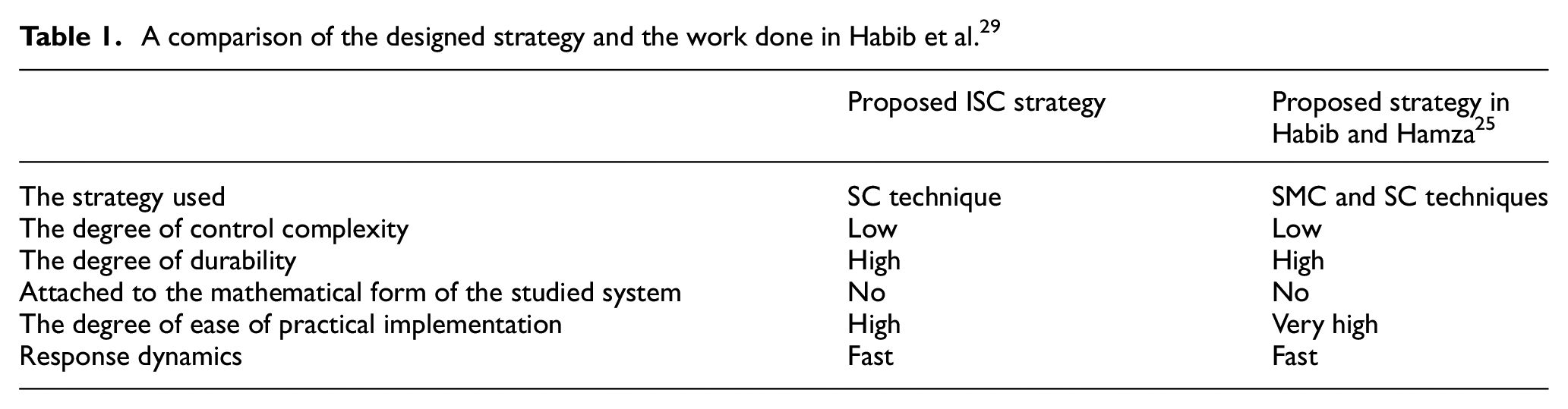
The designed controller in this section is different from the proposed strategy in work, 29 where the designed controller in Habib et al. 29 is a combination of SC and SMC techniques. So, the work done in this paper and the work done in Habib et al. 29 are different in principle, idea, and methods used for control. Table 1 represents a comparison between the strategy suggested in this work and the strategy implemented in the work. 29 This table was filed based on the results of this paper and the work performed in Habib et al. 29
A comparison of the designed strategy and the work done in Habib et al. 29
Proposed DARPC-ISC strategy
The DARPC technique of the variable-speed DFIG-DRWT system with the application of the designed ISC theory is shown in Figure 3. In this proposed DARPC, the Ps and Qs are regulated by the ISC controllers. However, the ISC-DARPC is a nonlinear control, robust, easy to implement, and simple algorithm. The suggested technique is a modification of the traditional DARPC, where the ISC controller is used instead of the hysteresis comparators and to control the inverter the PWM is used instead of using the switching table. The PWM strategy was discussed in detail in the work, 56 where the pros and cons of using this strategy in the field of control were given. In this proposed technique, the estimation of both Ps and Qs is used, as is the case in the traditional strategy. Therefore, high-quality voltage and current measuring devices must be used. Besides, the suggested DARPC with ISC controllers minimized the Ps and Qs ripples and give the minimum THD value of stator voltage compared to the conventional DARPC. However, the proposed ISC-DARPC minimizes the value of overshoot, steady-state error (SSE), and rise time compared to many methods such as the DARPC and FOC strategies. Also, durability is among the advantages of the ISC-DARPC compared to the DARPC, as when the parameters of the machine change, the proposed ISC-DARPC technique provides better results than the DARPC. Moreover, the proposed ISC-DARPC technique offers a fast dynamic response compared to the DARPC strategy.
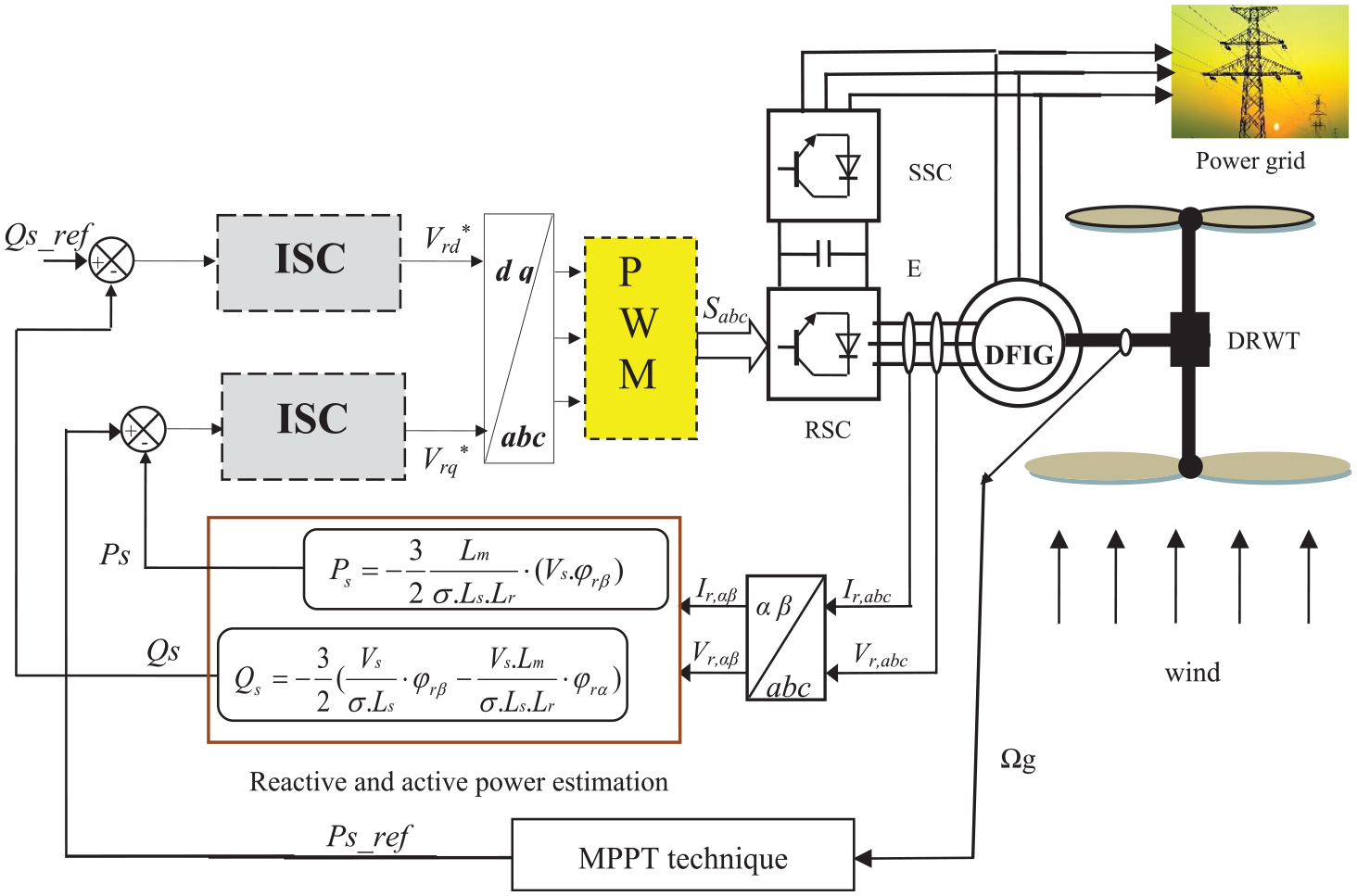
The ISC-DARPC technique of the DFIG-DRWT system.
In this proposed strategy, the MPPT strategy is used to obtain the reference value of Ps using wind speed, and a traditional MPPT based on the use of a PI regulator is used. In addition, the reference value of the Qs is set to 0 VAR.
The designed ISC-DARPC in this work is a development of the classical DARPC technique to improve the quality of the power and the Ps generated by the DFIG-DRWT. In the ISC-DARPC, the PWM technique is used to simplify the system, reduce cost, and facilitate control. The proposed ISC technique is used instead of the traditional hysteresis comparators. The proposed ISC-DARPC technique preserved simplicity, robustness, and ease of implementation. Also, the ISC-DARPC improves the characteristics of the DFI-DRWT system compared to the DARPC and some other controls such as the FOC strategy.
In the ISC-DARPC technique, the capacities are estimated to calculate the error in the Ps and Qs, as these errors are inputs to the ISC strategies. In addition, the equations used in estimating the Ps and Qs are the same equations used in Benbouhenni 26 and Lin et al. 27 In Table 2, the proposed ISC-DARPC technique is compared with some of the work done in Benbouhenni, 26 Lin et al., 27 Han and Ma, 28 Habib et al., 29 and Habib and Lemdani. 30 In this proposed strategy, the ISC technique is used to improve the current quality and Ps/Qs ripples of the DFIG-based DRWT system and the PWM is used to control the DFIG converter. Thus, the proposed ISC-DARPC technique is different from the techniques proposed in works Benbouhenni, 26 Lin et al., 27 Han and Ma, 28 Habib et al., 29 and Habib and Lemdani. 30
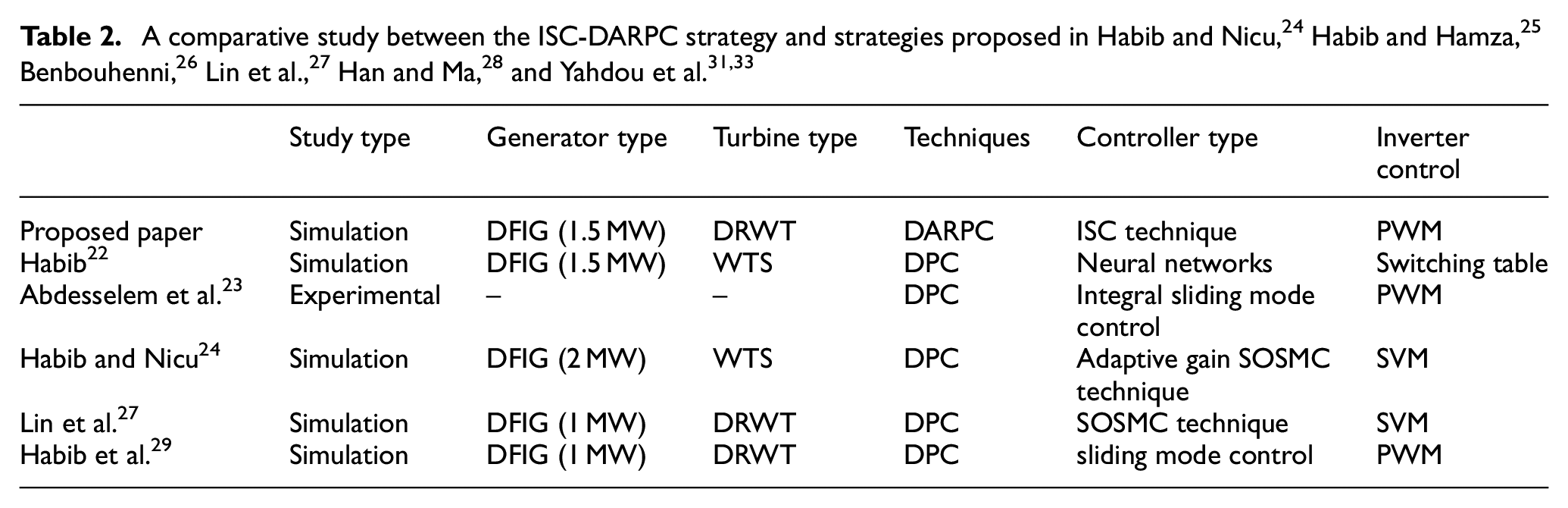
Regarding references Yahdou et al.,31,33 even though the same type of turbine is used, the strategy used to control the generator inverter in Yahdou et al.,31,33 is that of second-order sliding mode control (SOSMC), respectively SMC strategy, which completely different from the control scheme proposed in this paper.
To estimate the Ps and Qs, Equations (19) and (20) are used:


with:



The proposed strategy aims to control the Ps and Qs using the ISC strategy. Therefore, two ISC techniques are used to control the Ps and Qs, as there is one output and one input for each ISC controller. In addition, the input is represented by the error in the Ps and Qs, and the output is a statement of the reference value of the rotor voltage.
ISC-Ps control design
In the DGASPC strategy, a regulator PI is usually used in the outer loop Ps to generate reference Vqr*. In this work, we designed a novel nonlinear Ps regulator based on the proposed ISC controller.
The Ps regulator generates the reference rotor voltage (Vqr*). The macro-variable will be chosen as:

Then the derivative of it is given by:

Using Equation (18), the mathematical form of the ISC-Ps controller can be written as:

The ISC theory law must fulfil the Lyapunov technique to construct Ps controller stability. We can use the Lyapunov strategy to ensure a synoptic stability:

After differentiation one gets:


Thus, the inequality Equation (29) will ensure the stability of the closed Ps control loop.
The graphical representation of the control law of the ISC-Ps controller is shown in Figure 4.
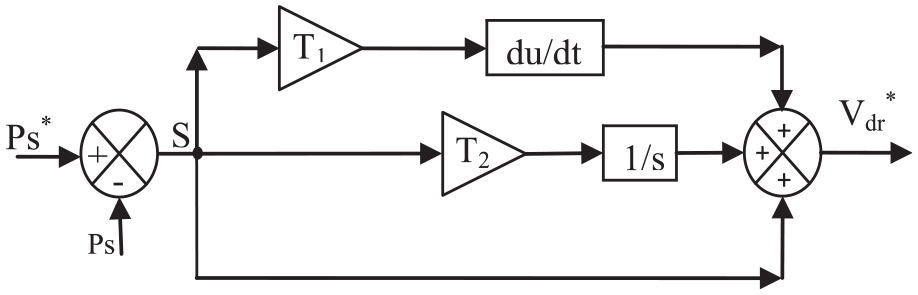
Structure of the ISC-Ps controller.
ISC-Qs control design
The Qs controller generates the reference rotor voltage Vdr*. The macro-variable will be chosen as:

Then the derivative of it is given by:

Using equation (18), the mathematical form of the ISC-Qs controller can be written as:

The structure of the control law of the ISC-Qs regulator is shown in Figure 5.
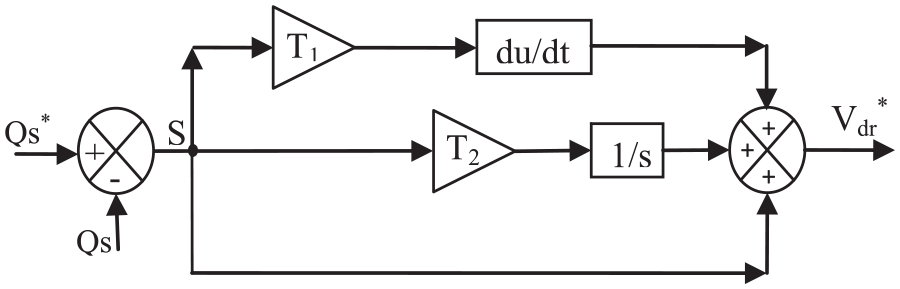
Structure of the ISC-Qs control.
The proposed ISC-DARPC strategy reduces ripples for Ps/Qs, torque, and current of the DFIG-DRWT compared to the conventional DARPC technique and some other methods such as the direct and indirect FOC strategies. Moreover, the proposed ISC-DARPC strategy gives a lower value for THD compared to the conventional DARPC technique and with some published work. Also, this proposed ISC-DARPC strategy improves the dynamic response of the Ps and Qs of the generator compared to the DARPC and this is what we will discover in the next part of the article.
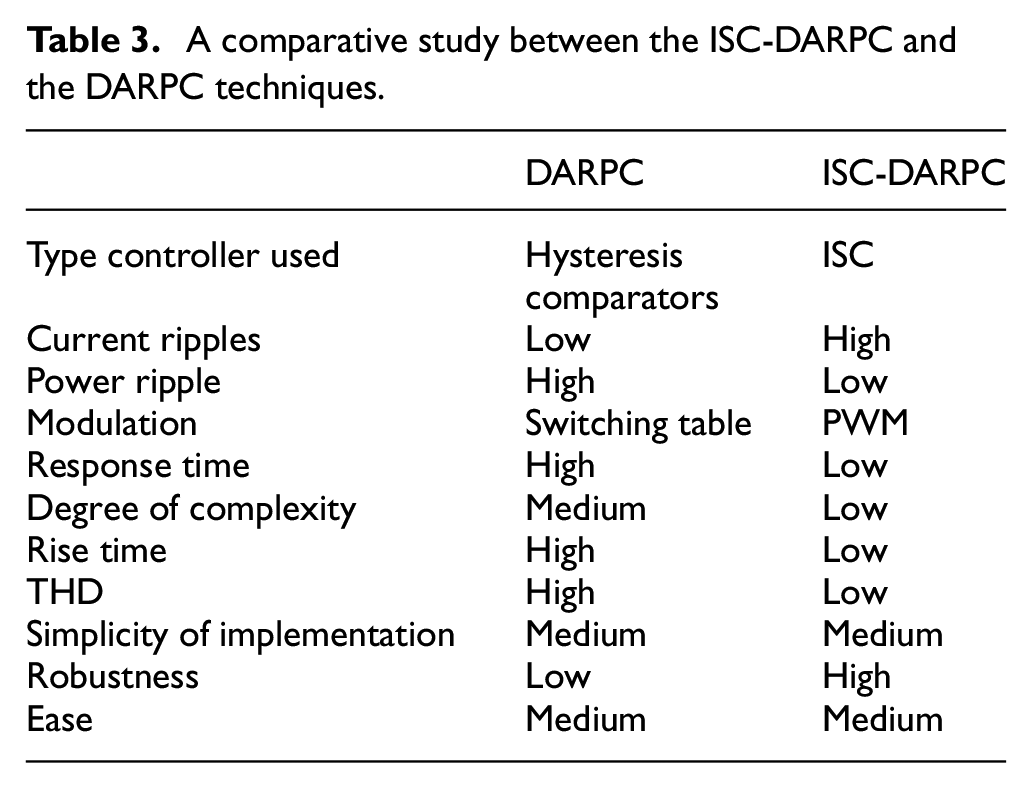
Table 3 shows this comparative study between the proposed and traditional DARPC strategies in terms of type controller used, degree of complexity, ease, simplicity of implementation, etc. Table 3 was completed using the simulation results obtained in this paper and those reported in other scientific works dedicated to the analysis of the DARPC strategy. Based on this table, it can be said that the designed nonlinear DARPC technique is more efficient and performant than the traditional DARPC technique, despite the difficulty of implementation that is medium for both strategies.
A comparative study between the ISC-DARPC and the DARPC techniques.
Analysis and results
The numerical results of the ISC-DARPC strategy of the variable-speed DFIG-DRWT system are compared with the conventional DARPC with a lookup table. Both strategies were tested under different tests.
The DFIG parameters are: Psn = 1.5 MW, p = 2, Rs = 0.012Ω, 50 Hz, 380/696 V, Rr = 0.021Ω, Ls =0.0137 H, J = 1000 kg.m2, fr = 0.0024 Nm/s, Lr =0.0136 H, and Lm = 0.0135 H. 57
First test
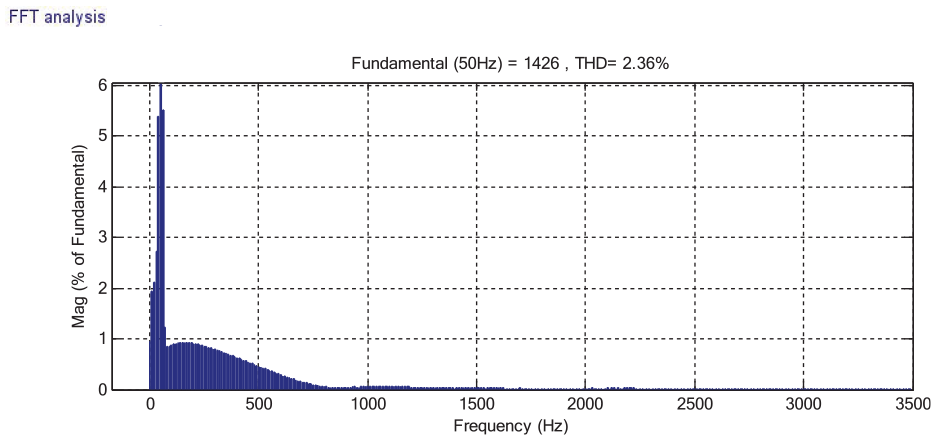
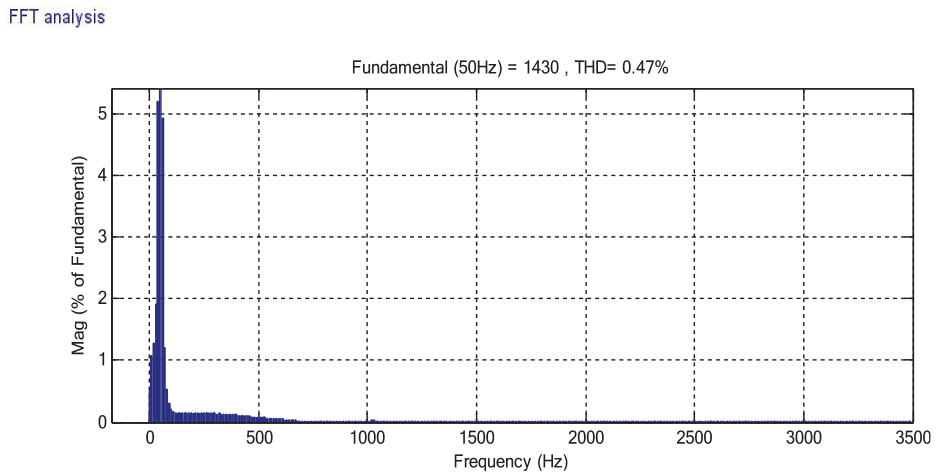
Figures 6 and 7 show the THD value of current for the conventional DARPC strategy with a lookup table and ISC-DARPC strategy, respectively. It can be observed that the THD is reduced for the ISC-DARPC (THD = 0.24%) when compared to the classical DARPC strategy with a lookup table (THD = 0.42%). So, the reduction ratio was about 42.85% compared to the DARPC, as this ratio indicates that the ISC-DARPC is better than the DARPC in terms of the quality of the current produced by the DFIG-DRWT system. In addition, the proposed strategy gave a value of the fundamental amplitude (50 Hz) of current equal to the amplitude in the case of conventional control, where the value was 1173 A and this is desirable.
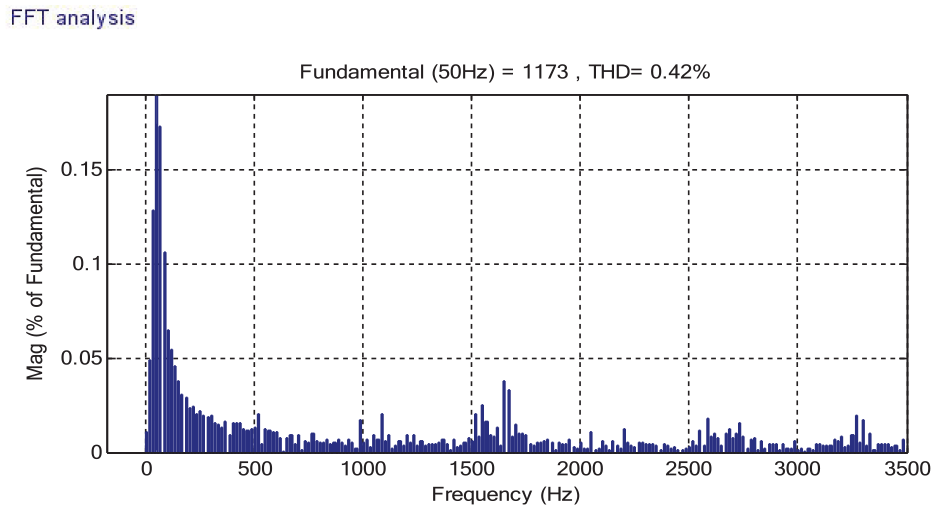
THD of current (DARPC).
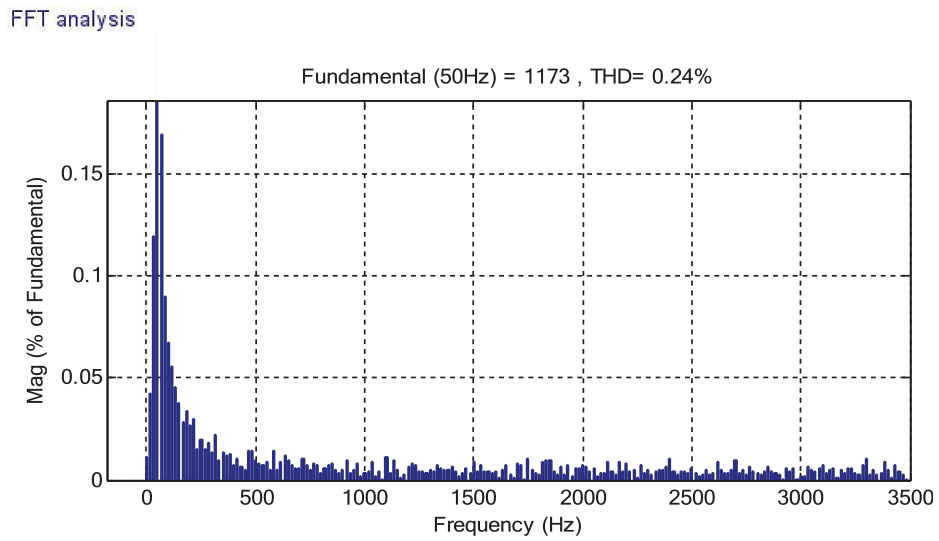
THD of current (ISC-DARPC).
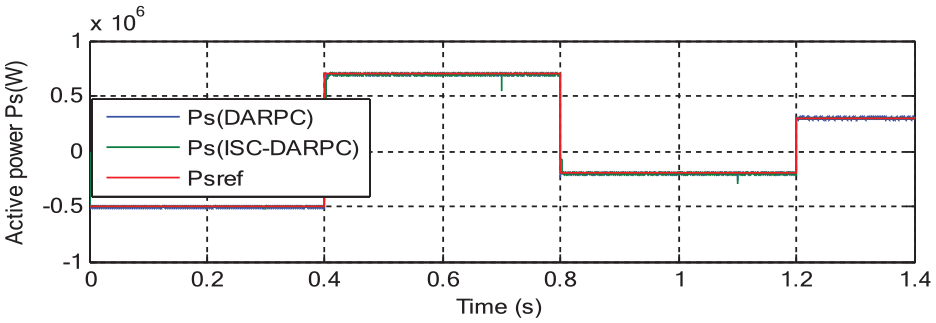
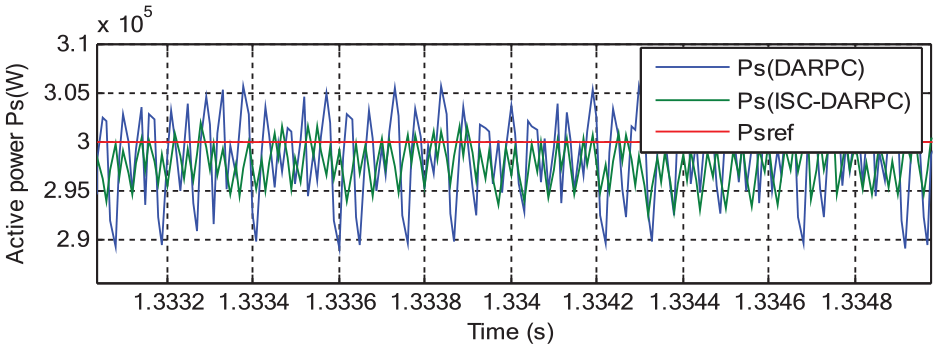
The simulation waveforms of the measured and reference Ps of the DFIG-DRWT system are shown in Figure 8 to compare the effectiveness of the ISC-DARPC strategy with the effectiveness of the conventional DARPC strategy with hysteresis controllers. The Ps tracks almost perfectly their reference value (Ps-ref ). The amplitudes of the oscillations of the Ps are smaller and occur in a shorter period time in comparison with the oscillations obtained for the ISC-DARPC strategy (Figure 9). On the other hand, the proposed ISC-DARPC strategy provided a fast dynamic response to the Ps compared with the DARPC.
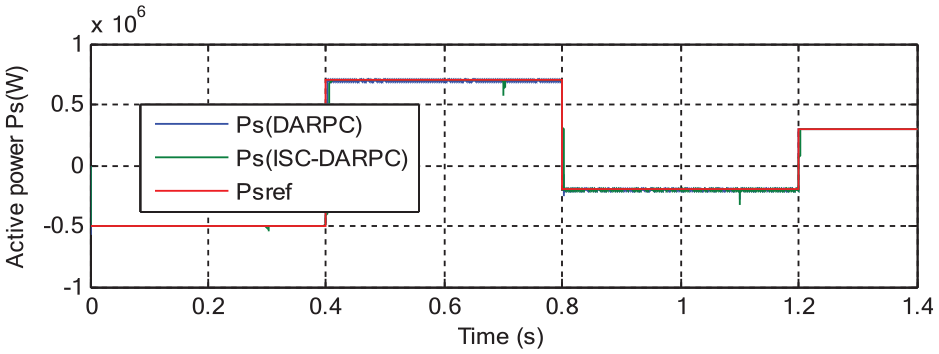
Ps.
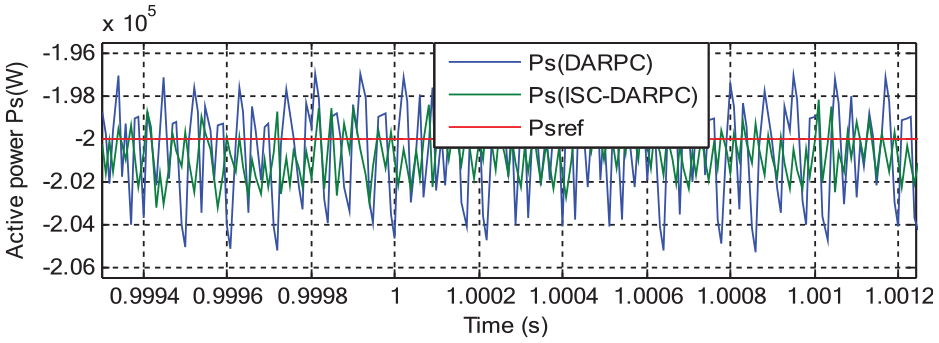
Zoom in the Ps.
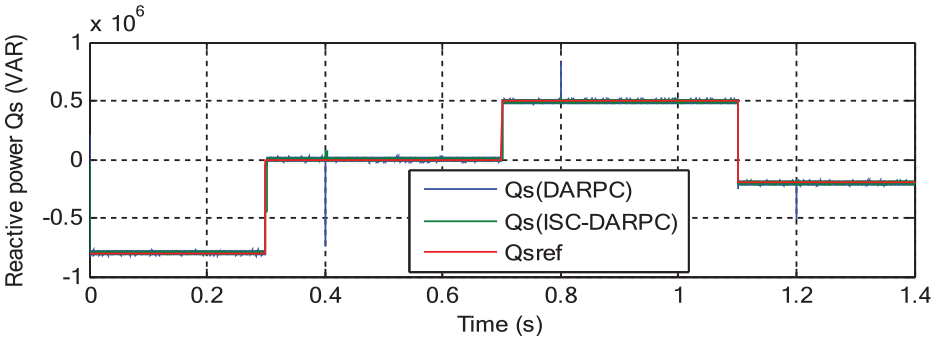
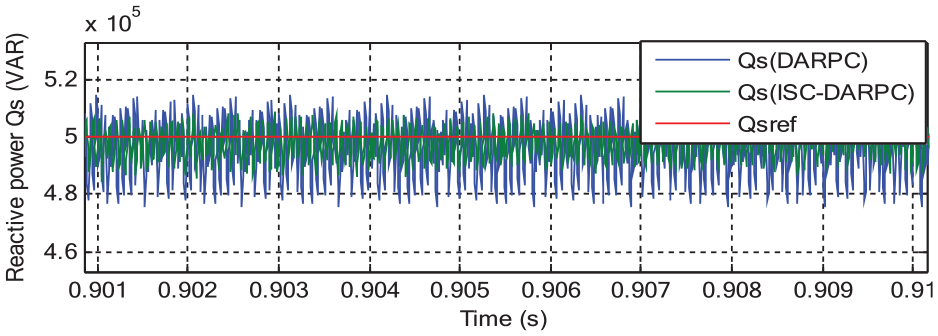
For the proposed ISC-DARPC strategy and conventional DARPC strategy with a lookup table, the Qs track almost perfectly their reference value (Figure 10). Moreover, the ISC-DARPC reduced the Qs ripple compared to the DARPC with a lookup table (Figure 11). Also, with a preference for the ISC-DARPC in the dynamic response compared to the classical DARPC strategy.
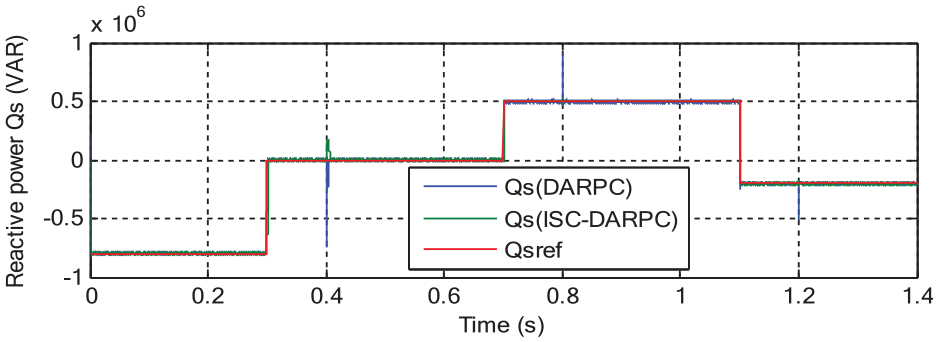
Qs.
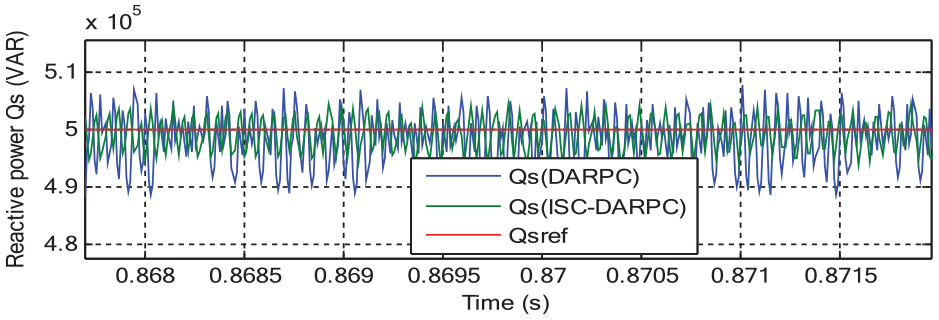
Zoom in the Qs.
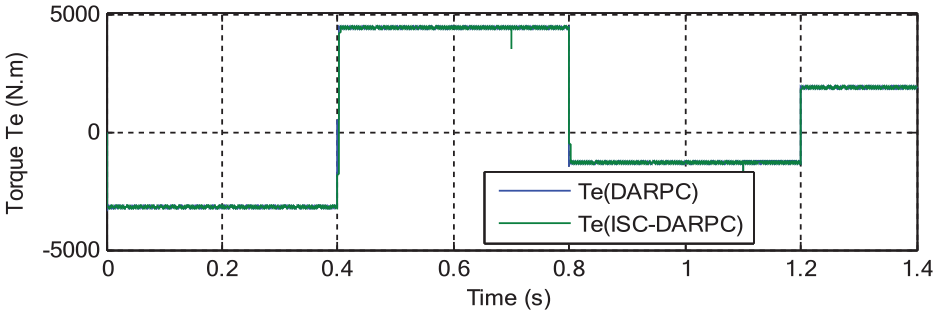
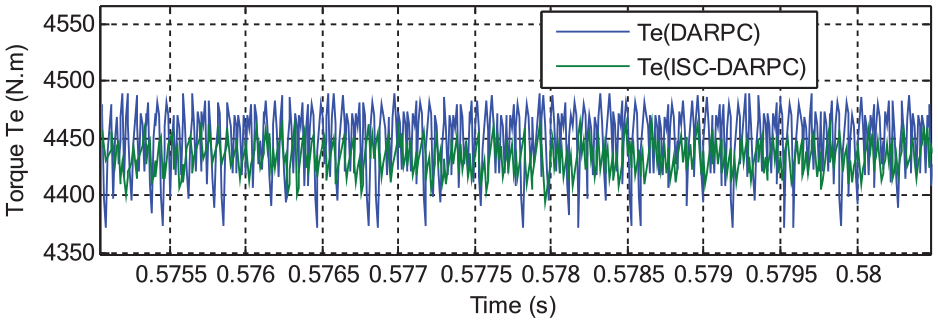
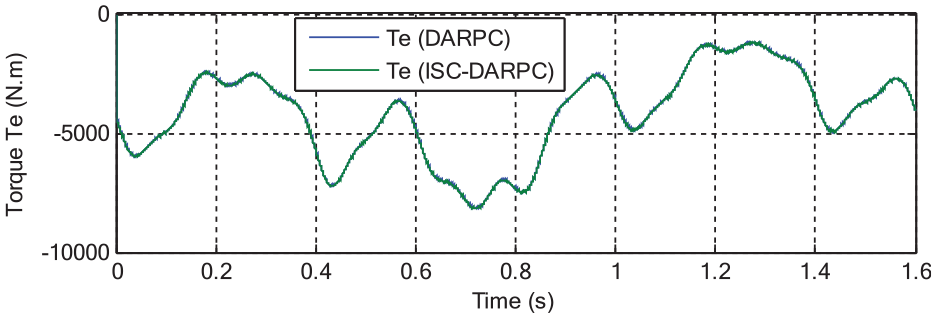
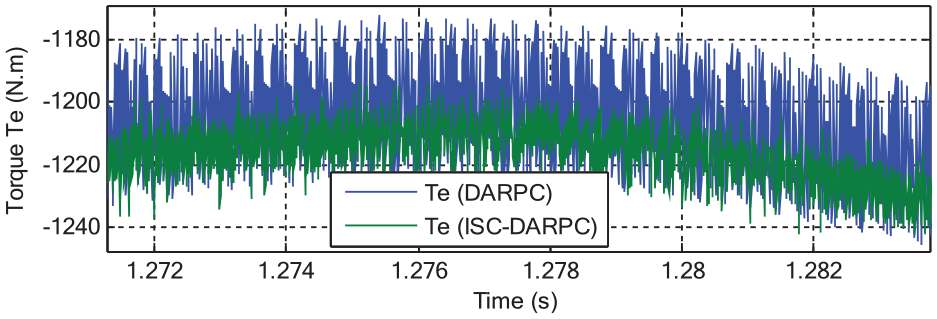
The waveforms of the torque of both techniques are shown in Figure 12. The amplitudes of the torque depending on the value of the load Ps and the state of the drive system. The ISC-DARPC minimized the torque compared to the conventional DARPC with a lookup table (Figure 13).
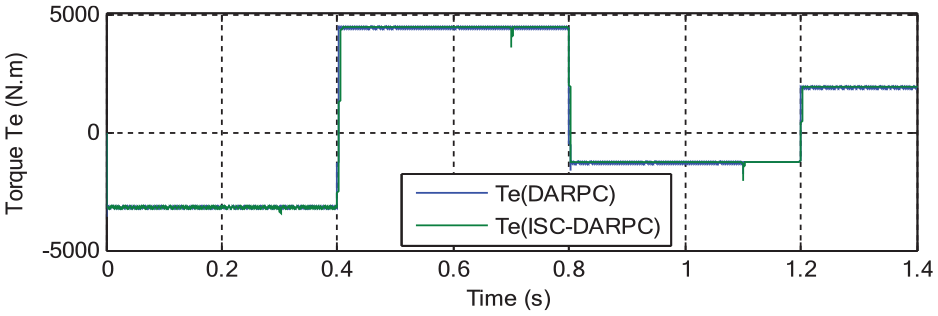
Torque.
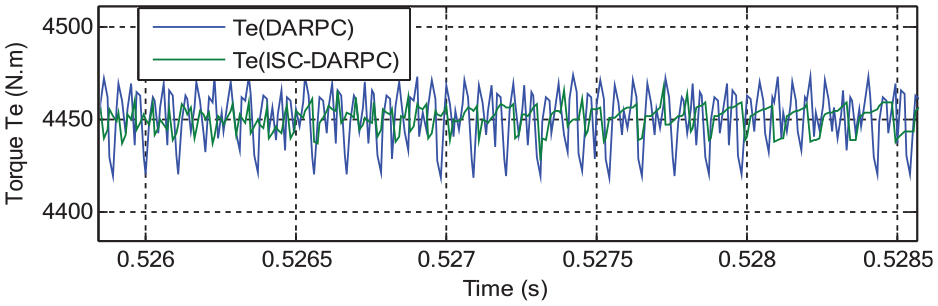
Zoom in the torque.
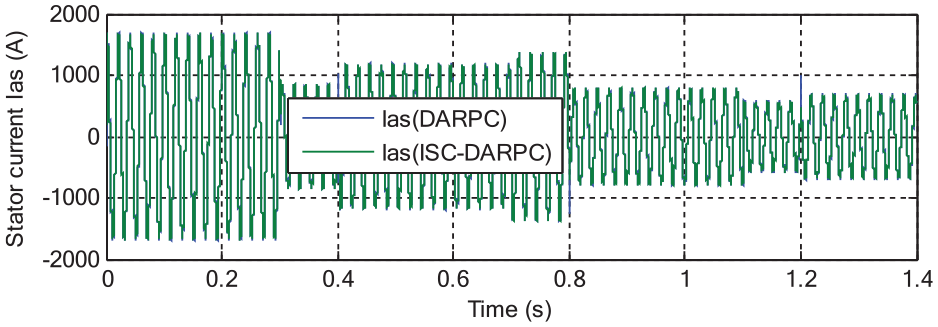
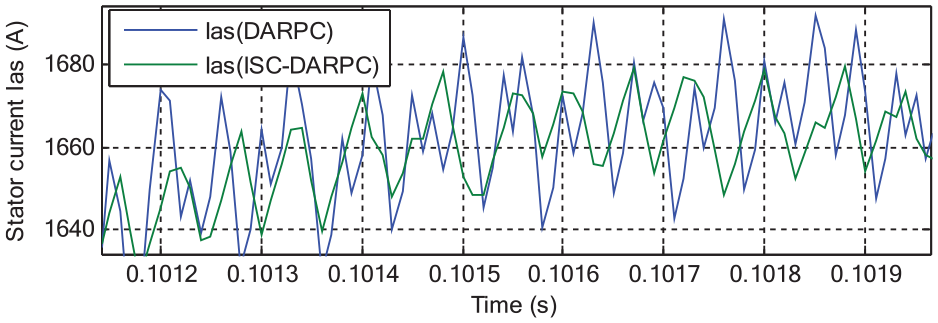
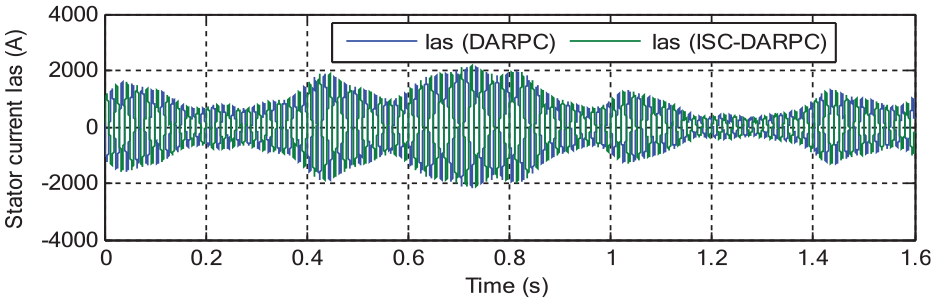
The trajectory of the measured magnitude of the current is shown in Figure 14. It can be seen that the amplitudes of the currents depend on the value of the load Ps/Qs and the state of the drive system. In addition, the conventional DARPC strategy with a lookup table gives more ripple in current compared to the ISC-DARPC technique (Figure 15).
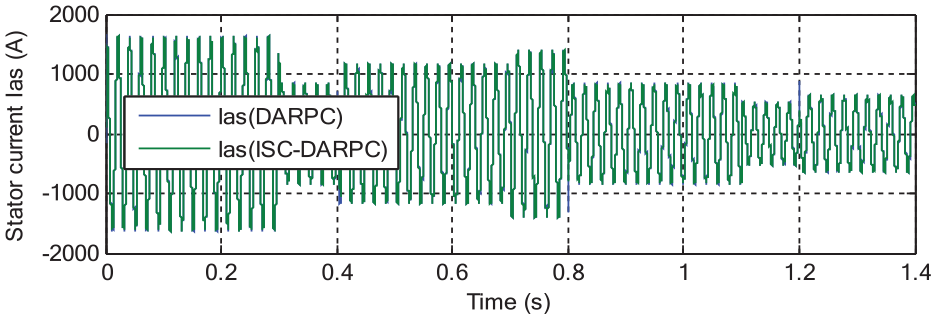
Current.
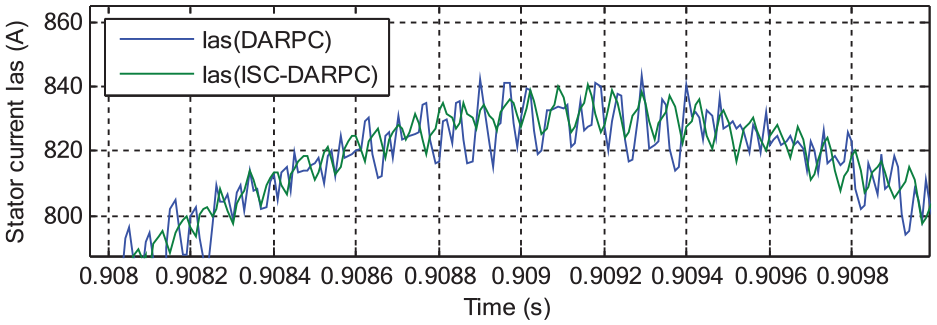
Zoom in the current.
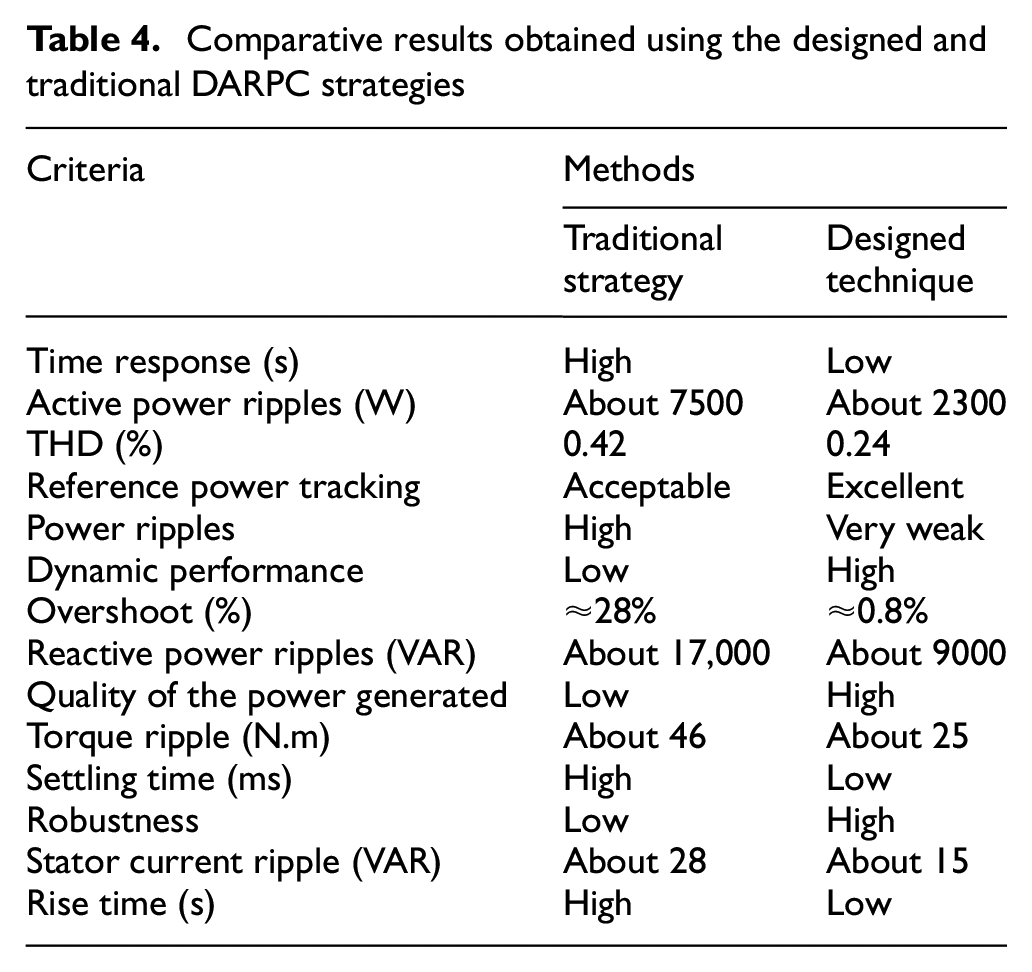
The results obtained from this test are summarized in Table 4. Table 4 is a comparative study between the ISC-DARPC strategy and the DARPC strategy in terms of the ratio of ripples and dynamic response. Through this table, the ISC-DARPC reduces the ripple ratio of Qs, current, torque, and Ps by about 47.05%, 46.42%, 45.65%, and 69.33%, respectively. Moreover, the proposed ISC-DARPC strategy provided a better dynamic response than the classical DARPC technique, which indicates the robustness of the ISC-DARPC strategy compared to the DARPC strategy. Also, the proposed ISC-DARPC minimized the THD value of the current by about 42.85% compared to the classical DARPC. In the next test, we will verify the robustness of the proposed strategy, and this is if the machine parameters are changed compared to the behavior of the classical strategy.
Comparative results obtained using the designed and traditional DARPC strategies
Robustness test
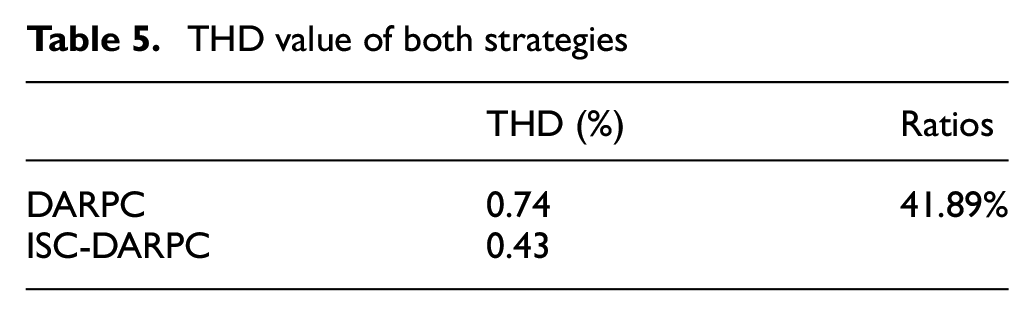
In this part, the nominal values of Rr and Rs are multiplied by 2, and Lr and L s are multiplied by 0.5. Simulation results are presented in Figures 16 to 25. As it is shown by these figures, these variations present an apparent effect on stator current, torque, Ps, and Qs such as the effect appears more significant for the conventional DARPC strategy with lookup table compared to ISC-DARPC strategy (Figures 22–25). The ISC-DARPC strategy reduced the THD of current compared to the conventional DARPC strategy with a lookup table (Figures 16 and 17). Table 5 shows the comparative analysis of the THD of the current. It can be concluded that the ISC-DARPC strategy is more robust than the classical DARPC technique with a lookup table. Also, the designed ISC-DARPC technique minimized the THD value of the current by about 41.89% compared to the DARPC technique (Table 5). It is noticed from Figures 16 and 17 that the proposed strategy provided a lower amplitude for the signal of fundamental (50 Hz) of current compared to the traditional control, where the value of the amplitude was 1174 A and 1178 A for the traditional control and the proposed one, respectively.
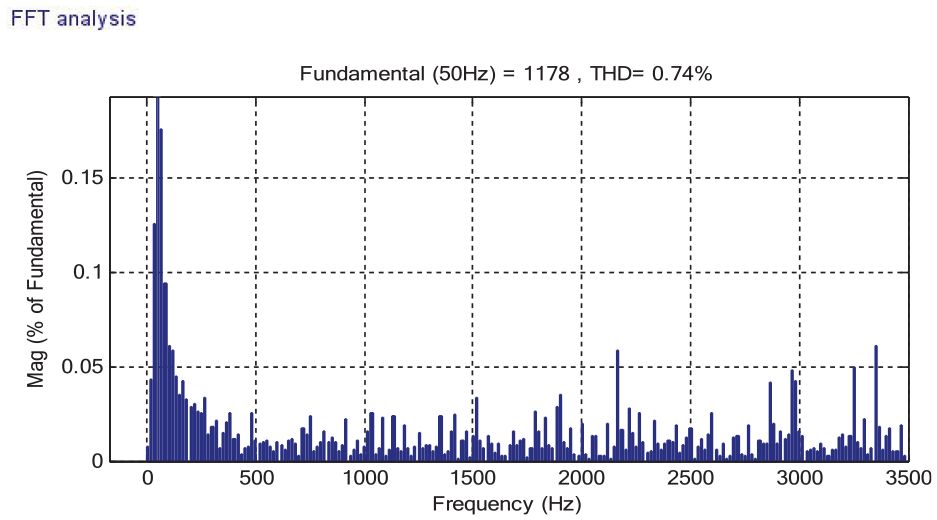
THD of current (DARPC).
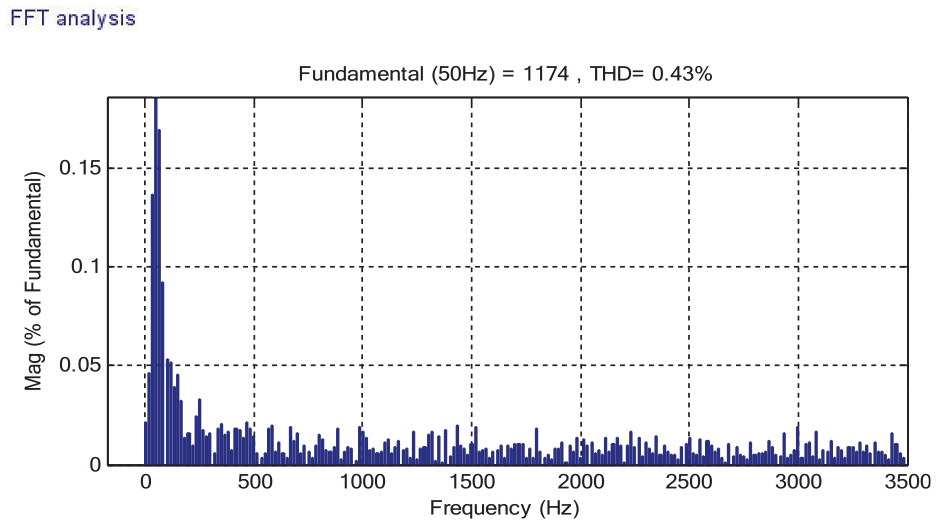
THD of current (ISC-DARPC).
Ps.
Qs.
Torque.
Current.
Zoom in the Ps.
Zoom in the Qs.
Zoom in the torque.
Zoom in the current.
THD value of both strategies
The results obtained from this test are summarized in Table 6, where Table 6 is a comparative study between the designed and the traditional DARPC technique in terms of the ratio of ripples of torque, current, Ps, and Qs. The ISC-DARPC provided good results and this is shown by the high ratios, where we find that the proposed ISC-DARPC technique minimized ripples compared to the classical DARPC strategy by rates ranging from 67.08%, 47.99%, 50%, and 65.07% for torque, Qs, current and Ps, respectively.
Comparative ripples obtained using the designed and classical DARPC techniques.

Variable-speed wind test
In this test, the MPPT technique is used to obtain the reference value of the Ps. Also, the reference value of the Qs is set at 0 VAR. This test aims to study the behavior of the ISC-DARPC in the case of variable wind speed compared to the classical DARPC technique. The wind speed profile used in this test in order to study the behavior of the proposed strategy is represented in Figure 26. The results of this test are shown in Figures 27 to 32. The Ps and Qs are shown in Figures 27 and 28, respectively. Through the two figures, the Ps and Qs follow the references excellently for the classical and ISC-DARPC technique, with a preference for the ISC-DARPC technique in the dynamic response. Also, the proposed ISC-DARPC technique reduced the ripples of both the Ps and Qs compared with the classical DARPC technique (Figures 33 and 34).
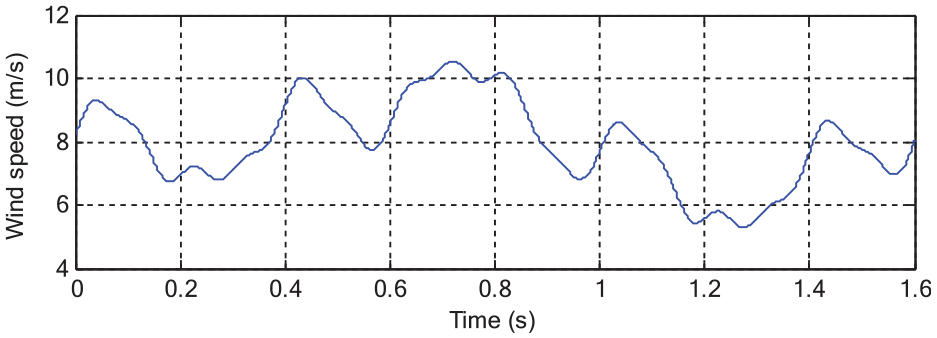
Wind speed profile.
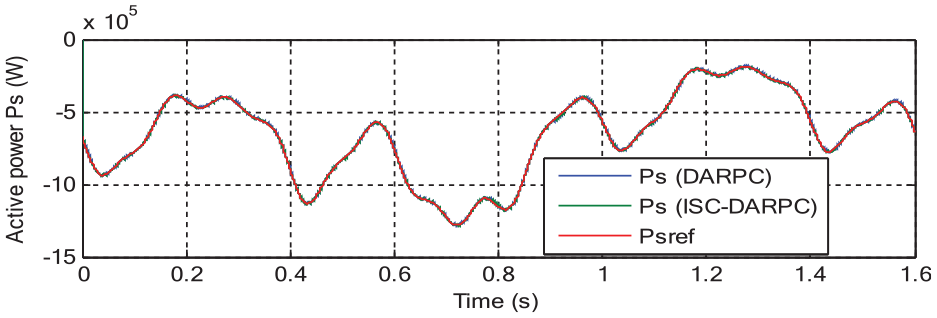
Ps.
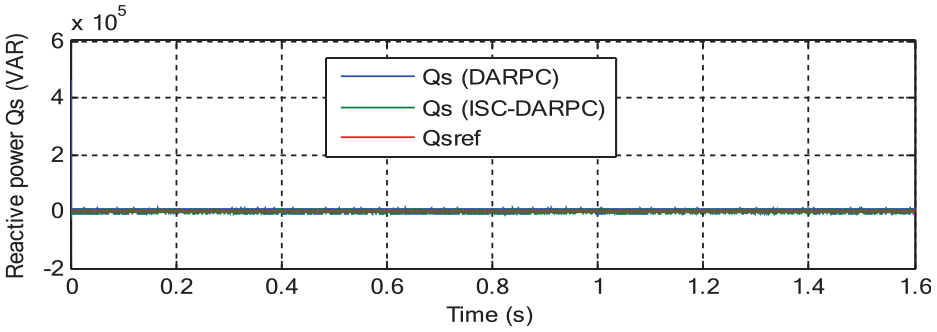
Qs.
Torque.
Current.
THD of current (DARPC).
THD of current (ISC-DARPC).
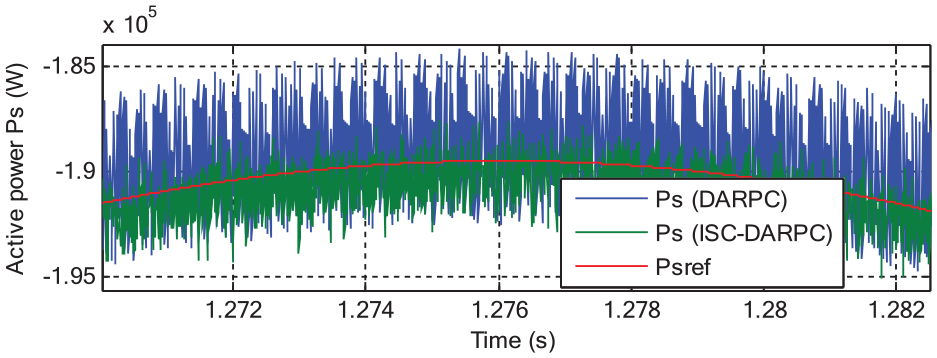
Zoom in the Ps.
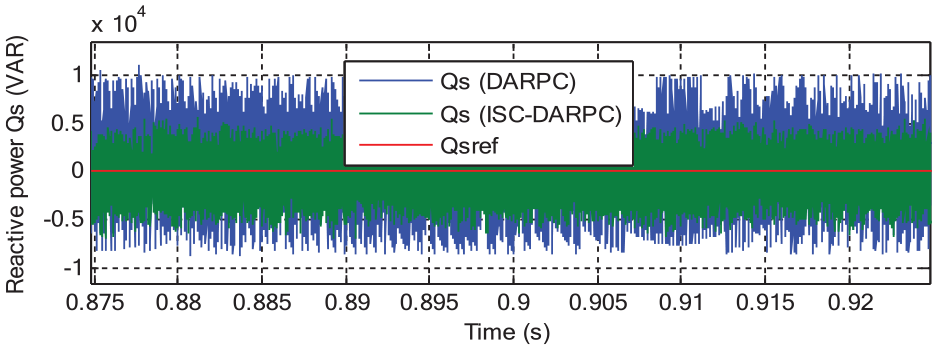
Zoom in the Qs.
The generator torque and current are shown in Figures 29 and 30, respectively. By the two figures, the form of torque and current is the same as the form of the Ps. The higher the value of the Ps, the higher the value of the torque and the current, and the lower the value of the Ps, the lower the value of both the current and torque. This is because the torque and current are related to the value of the Ps. Also, the ISC-DARPC reduced the ripples of both current and torque compared with the DARPC technique (Figures 31–33).
The THD of the current is shown in Figures 34 and 35 for the classical and ISC-DARPC techniques, respectively. Through the two figures, the proposed ISC-DARPC technique reduced this value compared to the DARPC technique, and the reduction ratio was about 80.08 %. Note that the proposed strategy gave a value of the fundamental amplitude (50 Hz) of the current slightly higher than in the case of the conventional control.
Zoom in the torque.
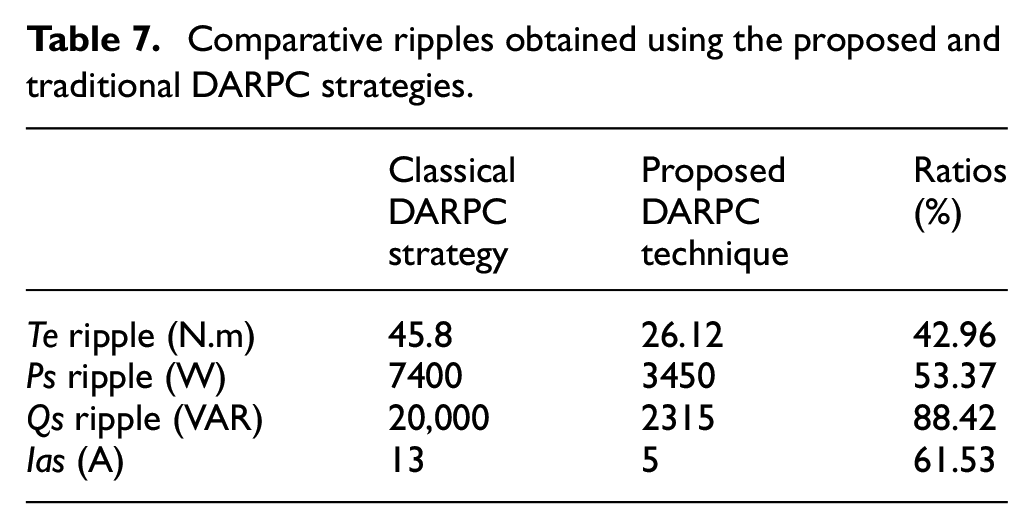
The value of the ripples of the current, torque, the Ps, and Qs are shown in Table 7 for both the classical and the proposed ISC-DARPC techniques. Through the table, the proposed ISC-DARPC technique minimized these ripples compared to the traditional DARPC, where the reduction ratio was 42.96%, 53.37%, 61.53%, and 88.42% for torque, Ps, current and Qs, respectively.
Comparative ripples obtained using the proposed and traditional DARPC strategies.
It is necessary to compare the proposed DARPC strategy with some published works around the world, and this is in terms of the value of THD and the quality of the current obtained in the electrical network. Table 8 represents the comparison between the proposed ISC-DARPC strategy in this paper with some published works. From Table 8, we find that the proposed ISC-DARPC gave a lower value for THD compared to some of the implemented controls. Accordingly, it can be concluded that the proposed ISC-DARPC is robust compared to some techniques due to the use of the designed ISC technique.
Comparison of current THD values with other strategies.
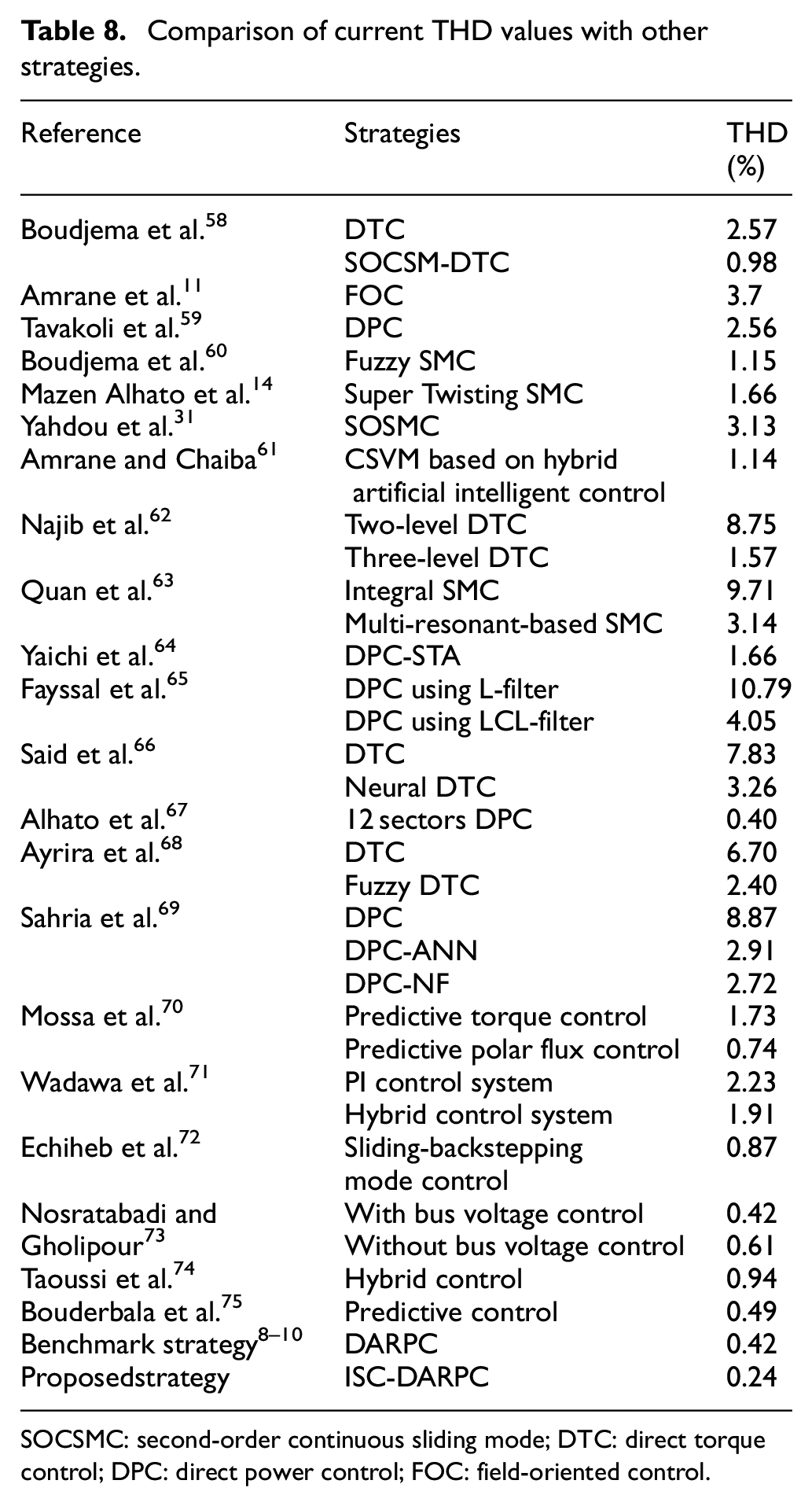
SOCSMC: second-order continuous sliding mode; DTC: direct torque control; DPC: direct power control; FOC: field-oriented control.
In Table 9, a comparative study is carried out between the work done and published scientific works in terms of the ratios of ripple reduction, current, Ps, torque, and Qs, to find out the efficiency of the proposed strategy in improving energy quality. Through this table, the ISC-DARPC has high reduction rates compared to several proposed strategies in research work published in reportable scientific journals due to the use of proposed ISC controller, which we can say that the proposed strategy can be relied upon in controlling electric generators.
Comparison in terms of ripple reduction rates.
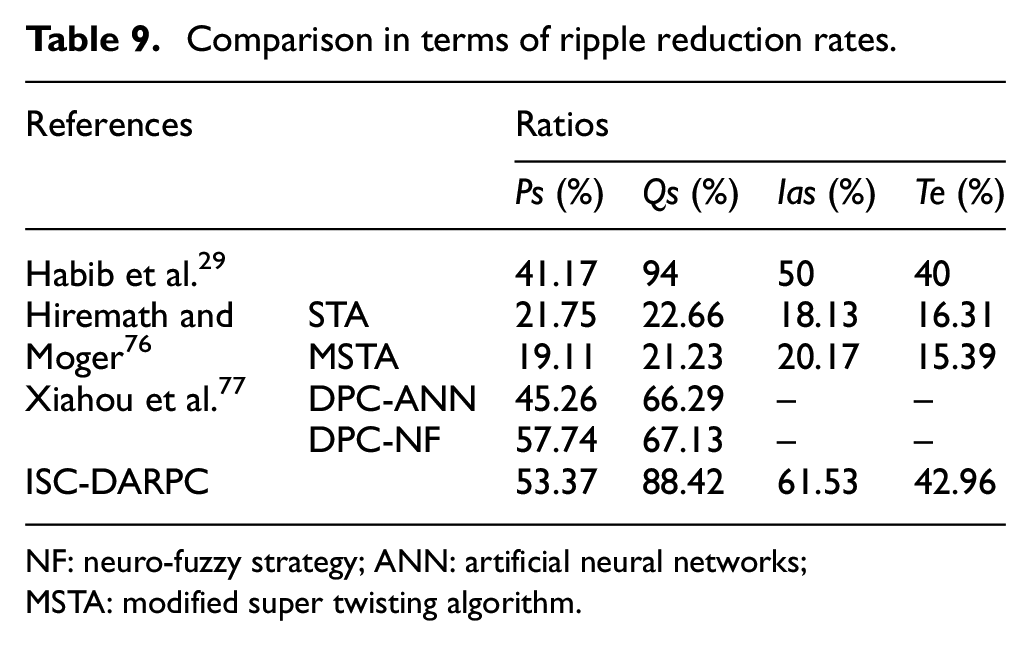
NF: neuro-fuzzy strategy; ANN: artificial neural networks; MSTA: modified super twisting algorithm.
Conclusion
In this paper, a DARPC based on suggested ISC controllers of the DFIG fed by a PWM inverter is designed. A simple integral-synergetic active and reactive powers controller is synthesized instead of using the classical hysteresis comparators. The designed technique overcame the major disadvantages of the traditional DARPC strategy such as the high oscillations of the reactive and active powers caused by the variable switching frequency. Thanks to the designed ISC-DARPC, the reactive and active power ripples are improved and the THD value of the current is reduced. Moreover, with the introduction of the proposed ISC strategy, the robustness of the reactive and active power controllers against load disturbances is enhanced. The numerical results showed a significant improvement in dynamic characteristics (torque, reactive, and active powers). Also, the results obtained from this work are indicated in the following points:
ISC-DARPC improves the effectiveness of the DARPC of the variable-speed DFIG-DRWT system.
ISC-DARPC decreases the THD values of the current.
ISC-DARPC is more robust compared to the traditional DARPC technique.
ISC-DARPC minimizes the ripples of active power, torque, reactive power, and current compared to the traditional DARPC technique and other strategies proposed in the literature.
In future work, the ISC-DARPC technique proposed in this paper will be experimentally implemented on an asynchronous generator in a wind turbine system. This strategy can also be applied to other generators, such as the multi-phase asynchronous generator.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the Framework Agreement between the University of Pitesti (Romania) and King Mongkut’s University of Technology North Bangkok (Thailand), in part by an International Research Partnership “Electrical Engineering–Thai French Research Center (EE-TFRC)” under the project framework Lorraine Université d’Excellence (LUE) in cooperation with Université de Lorraine and King Mongkut’s University of Technology North Bangkok and in part by the National Research Council of Thailand (NRCT) under Senior Research Scholar Program, Grant No. N42A640328, and in part by King Mongkut’s University of Technology North Bangkok under Grant no. KMUTNB-64-KNOW-20.