
Abstract
Since coronary artery disease is the leading global cause of mortality and morbidity, this paper investigates the chaos suppression of coronary artery systems. The motivation of the paper is to discuss and analyze coronary artery disease in the field of dynamics. Firstly, the mathematic model of coronary artery systems is formulated and the properties of this model are illustrated by bifurcation diagram, information entropy analysis, phase plane trajectory, and Poincaré section. With regard to the uncertainties of coronary artery systems, the disturbance observer technique is adopted. Meanwhile, the smooth second-order sliding mode controller is designed to suppress the chaos phenomenon. In light of the combination of the controller and observer, the stability of such a closed-loop system is proven in the sense of Lyapunov. Finally, some numerical simulations demonstrate the feasibility and validity of such design.
Introduction
Coronary artery systems are two blood vessels that branch from the aorta. They are close to the point of departure from the heart. They take charge of carrying oxygen-rich blood to the myocardium. Blockage of any branch of the coronary arteries will cause death of a portion of the heart tissue because it is deprived of oxygen-rich blood. Such blockage leads from coronary artery disease. 1 It is reported that the coronary artery disease is the leading global cause of mortality and morbidity. 2
From the aspect of medical treatment, the coronary artery disease is characterized by an inadequate supply of oxygen-rich blood to the myocardium because of narrowing or blocking of a coronary artery by fatty plaques. If the oxygen depletion is extreme, the effect may be a myocardial infarction, that is, heart attack. If the deprivation is insufficient to cause the death of a section of heart muscle, the effect may be angina pectoris, that is, pain or discomfort in the chest. Both the effects can be fatal because they can lead to heart failure, ventricular fibrillation as far as sudden death. 3 Therefore, effective management and treatment of the coronary artery disease rely on risk assessment stratify. In order to assess the risk, mathematical modeling is powerful. 4
When heart failure or ventricular fibrillation takes place, it is characterized by an uncontrolled and uncoordinated contraction of the coronary artery systems. From the aspect of mathematical modeling, such contraction can be treated as the phenomenon of chaos. 5 With regard to the chaotic phenomena, such abnormal and fatal chaos can induce the coronary artery disease because chaotic systems are very sensitive to perturbations. Unfortunately, there are just many perturbations in the coronary artery systems, that is, body temperature, blood pressure, blood viscosity, and so forth. This fact indicates that the effective management and treatment can be mathematically considered as the chaos suppression problem of the coronary artery systems. 6
Since the coronary artery systems are inherently nonlinear, they are rather complicated. 7 Such characteristics challenge the chaos suppression very much. So far, many methods have been presented to suppress the chaos of coronary artery systems, including sliding mode or variable structure control methods, 8 time-delay based control design,9,10 adaptive fuzzy control approach, 11 to name but a few. The idea behind these methods is to suppress the fatal chaos so as to avoid serious health problems and illness development. 12 For the purpose of effective treatment, the motion states in a vessel with pathological changes have to synchronize with the motion states of a normal vessel through the designed chaos-suppression methods. Therefore, two problems from the aspect of chaos suppression rise up for coronary artery systems. One is how to gain some insight into the chaotic behaviors. The other is how to develop the effective chaos-suppression methods.
As a powerful design tool, the methodology of sliding mode control (SMC) is advocated and investigated for the chaos-suppression problem of the coronary artery systems because the SMC methods exhibit better control performances than the conventional robust control methods.13,14 Although the SMC methods suffer from the chattering drawback, many sliding mode-based methods have been reported for the chaos-suppression problem, that is, terminal sliding mode control, 15 higher order sliding mode adaptive control 16 and fractional-order sliding mode control. 17 There is a variety of SMC design methods, wherein one is called second-order SMC. Such second-order SMC method not only possesses the property of resisting uncertain disturbances, but also attenuates the adverse effects of chattering.18–20
Concerning the coronary artery systems, the achievement of the chaos-suppression problem indicates that the symptoms of the coronary artery disease are disappeared or relieved, which will be beneficial for patients a lot. Further, doctors argue that the chattering should be as less as possible during the process of chaos suppression, which will inspire and encourage us to develop more effective SMC methods with high performance. Motivated by the merits of the second-order SMC method, this paper investigates a smooth second-order SMC method for the chaos-suppression problem of the coronary artery systems. Once the abnormal and fatal chaotic behaviors take place in the coronary artery systems, the smooth second-order SMC method is able to reject them despite uncertainties. Meanwhile, the kind of SMC method is able to avoid the chattering.
Clinically, many risk factors are imperceptible to patients but pivotal to the coronary artery systems, such as, the perturbation of blood pressure, the concentration of serum cholesterol, the change of ambient temperature, even the fluctuation of emotion. 21 These risk factors can hardly be measurable, predictive or known in advance. They can be treated as the disturbances of the coronary artery systems, which make the chaos suppression problem extremely tough. It is reported that the disturbance-observer technique is powerful to resist disturbances.22,23 This paper fuses the technique with the smooth second-order SMC method for this chaos-suppression problem.
Medically, the developed second-order SMC method means a certain clinical pharmacy and medical device for therapeutic purposes. The proposed strategy can promote the research and development because therapies can be treated as a kind of control input to suppress the chaotic vasospasm. Considering a certain therapy, it can be treated as the control input of this chaotic system. Once the therapy is effective, the chaotic phenomenon has to achieve state synchronization of the blood vessels with pathological changes and the normal blood vessels. In this sense, the designed control can be utilized by a pharmacodynamics or a medical device, which is also the potential application of the presented control design.
This paper faces with the chaos-suppression problem of the coronary artery systems. The remainder of this paper is organized as follows. Modeling and chaotic behavior analysis of the coronary artery systems are addressed in Section 2. Section 3 designs the smooth second-order SMC method in the sense of Lyapunov. In Section 4, the control design is implemented via a numerical platform and some comparisons are illustrated to support the control design. Finally, Section 5 concludes this paper.
Modeling and analysis
Bio-mathematical model
Coronary arteries extend over the surface of heart and branch into smaller capillaries. They move in a complex pattern during each cardiac cycle. Characteristically, such arteries are categorized as muscular blood vessels. The lumped-parameter model that is applicable to the interpretation of a coronary artery has the form of
Here
Model-based analysis
No matter what coronary artery disease is, one of the clinic symptoms is vasospasm. Since the coronary artery spasm means an uncontrolled and uncoordinated contraction of the blood vessels that deliver blood to heart muscle, many serious consequences may be believed to be due to partial or complete occlusion of the blood vessels. (1) is just a window that gains some insight into such spasm from the aspect of dynamics.
In (1), define the initial condition at
Bifurcation diagram
The bifurcation diagrams of the coronary artery system are illustrated in Figure 1. In Figure 1(a), the diagram shows the changes of
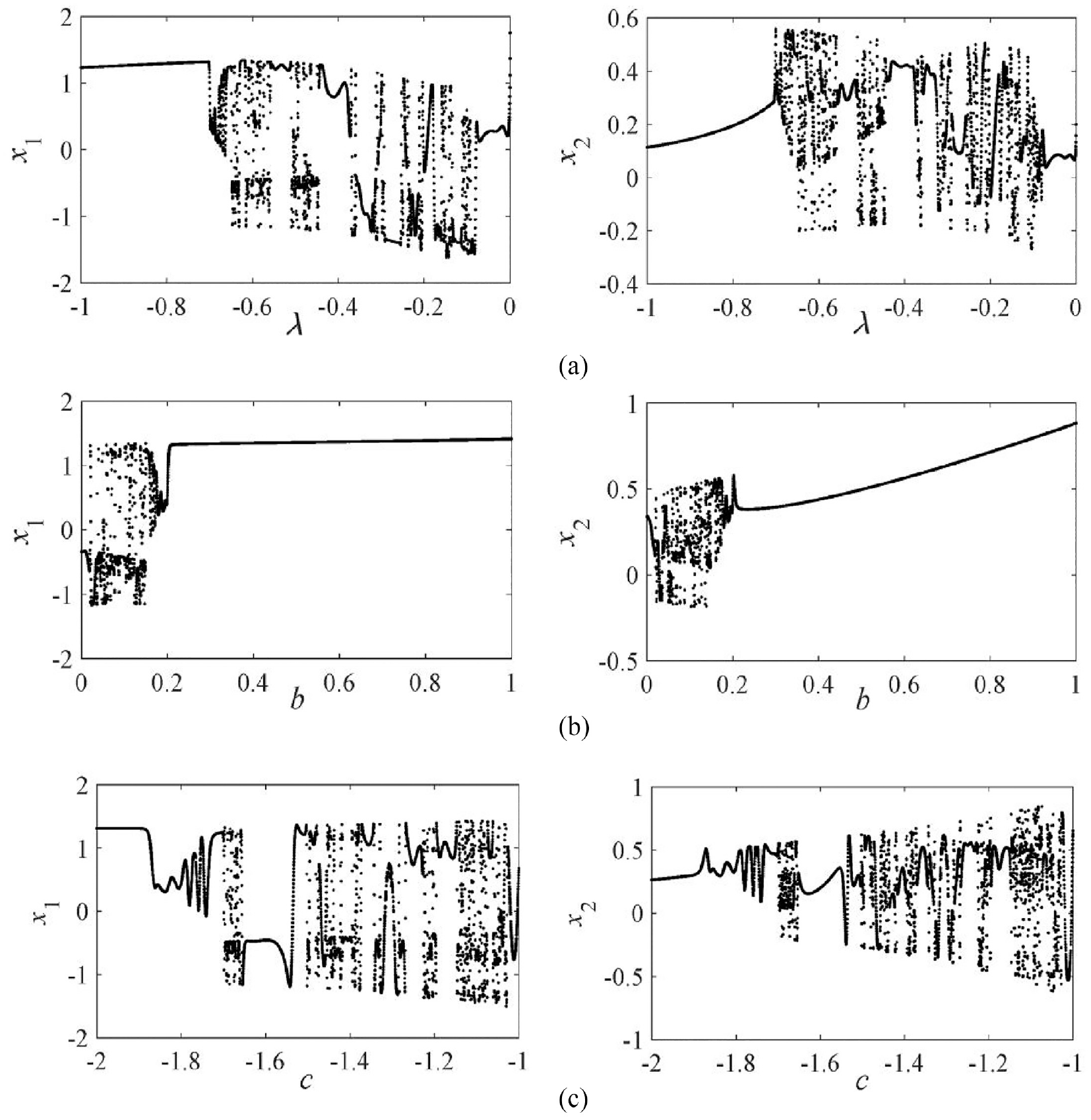
Bifurcation diagrams: (a) obtained by the change of
Information entropy analysis
According to its concept, information entropy refers to the degree of chaos in a system. As an indicator, the more orderly the system is, the lower value its information entropy has. On the contrary, the more chaotic the system is, the higher value its information entropy has.
Here the data in Figure 1 are employed. For each parameter, 5000 numbers in its closed interval are available. In order to calculate the information entropy of the coronary artery system, each 10 consecutive numbers in the closed interval are divided into a sub-interval so that 500 sub-intervals are gotten. Apparently, the maximum and minimum can be found in the 5000 numbers.
Define another closed interval that is between the extreme values. Then, divide this interval into 10 equal sub-intervals. Concerning each 10 consecutive numbers, count the quantity that they fall into each sub-interval. Finally, the value of information entropy

Here
Figure 2 illustrates the diagrams of information entropy of the coronary artery system. It can be calculated that the maximum of information entropy is
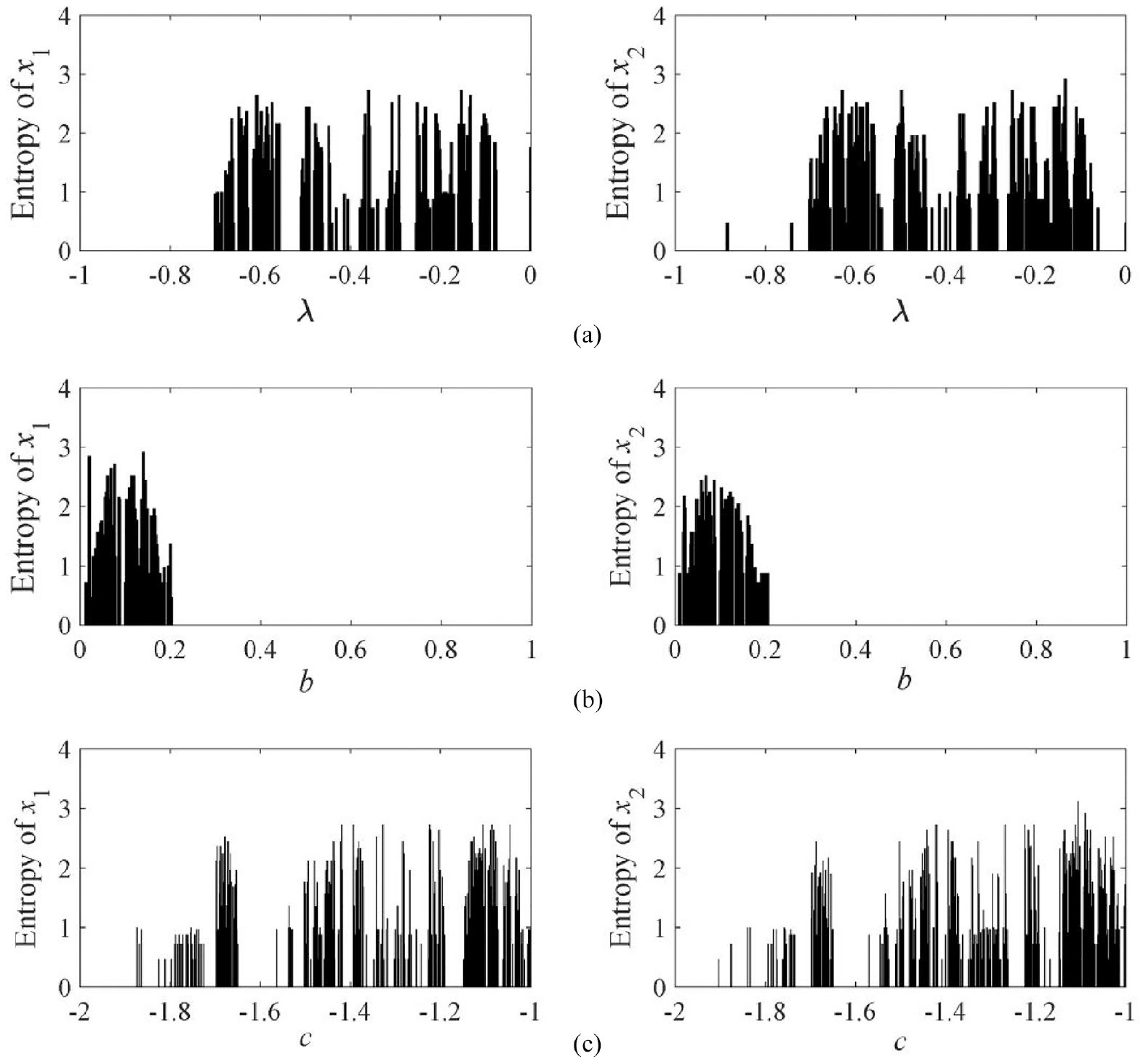
Diagrams of information entropy: (a) calculated by the change of
Dynamic behaviors
Consider the coronary artery system described by (1) with the selected representative parameters. Figure 3 illustrates the dynamic behaviors of the coronary artery system. Figure 3(a) in the phase plane demonstrates that the trajectory of this coronary artery system is very complex. It is well known that the technique of Poincaré section is a general method to explain complex dynamics because the technique can help to visualize the complexity. Here the Poincaré section analysis is carried out as insight into the complexity of the coronary artery system. Since the system (1) possesses two variables, an extended system should be defined in order to depict the system dynamics in 3 dimension. For this purpose, define
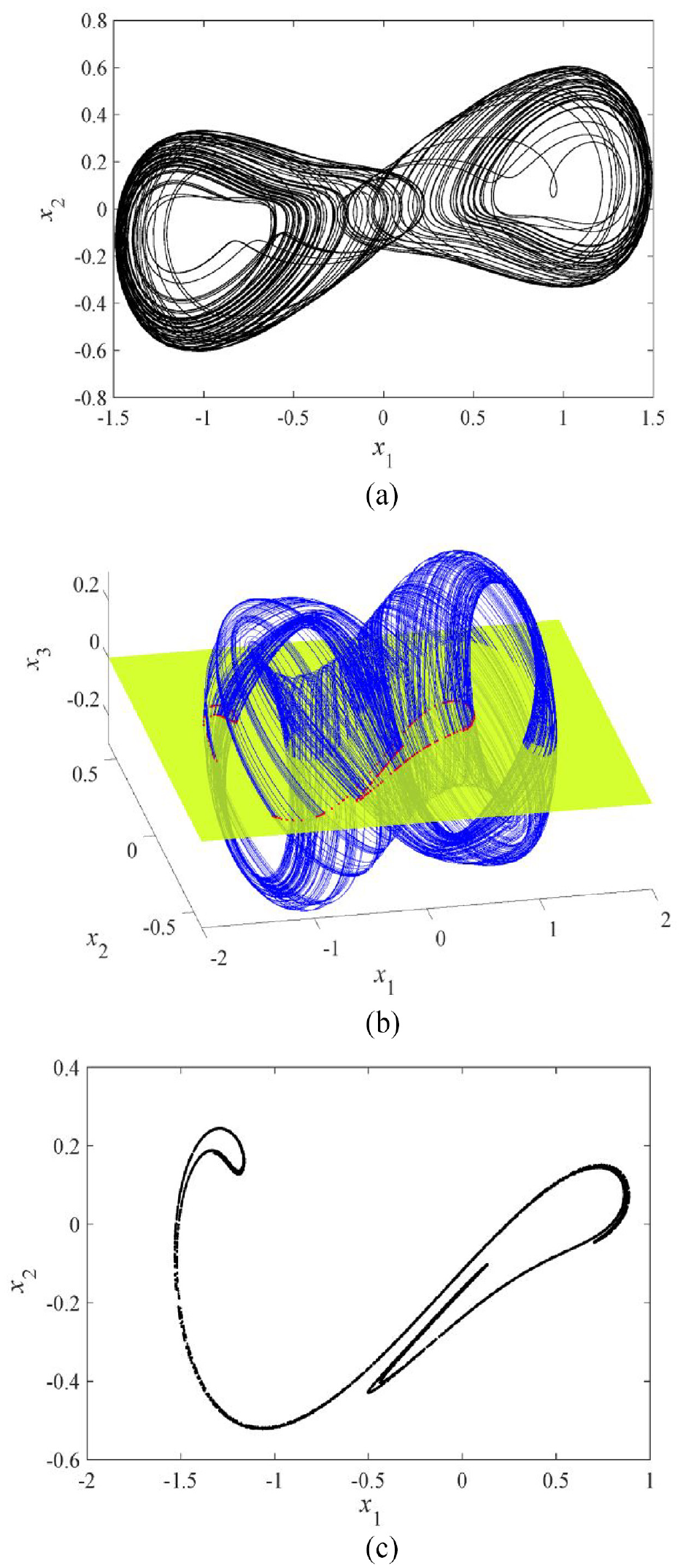
Diagrams of dynamic behaviors: (a) phase plane trajectory, (b) Poincaré section in three dimension, and (c) Poincaré section.
In clinic, these dynamic behaviors referring to the vasospasm of the coronary artery system implicate a large number of coronary artery diseases. Unfortunately, such complexity challenges the chaos suppression problem of the coronary artery system very much.
Control design
According to the bio-mathematical model (1), a coronary artery system with uncertainties can have the form of
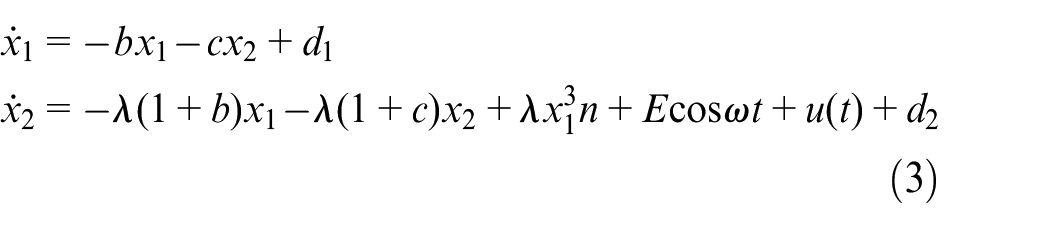
where
Assumption 1:
Assumption 2:
Both Assumption 1 and Assumption 2 originate from the biological properties of the coronary artery system because violent disturbances may cause some irreversible damages of the coronary artery system. From the perspective, both the assumptions are mild.
The nominal system (4) with no control input can be drawn in light of the uncertain model (3).

Here
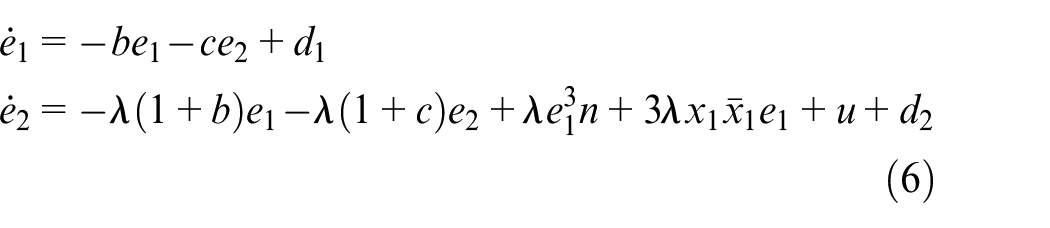
According to the aforementioned model-based analysis about (1), not only the nominal system (4) exhibits the complex dynamic behaviors, but also it is sensitive to the system parameters. For the chaos suppression problem of the uncertain coronary artery system (3), the developed smooth second-order sliding mode controller carried out in (3) needs to possess the ability of forcing the error vector

Here
Substituting (3) and (4) into the definition of
Let
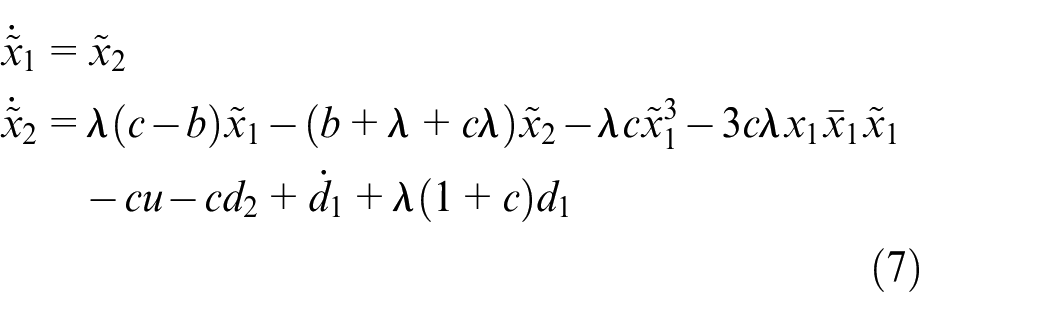
Considering Assumption 2, there exists

Here
Take Assumption 1 into consideration. In (8), there exists

Design of disturbance observer
(9) indicates that

Here
Define the estimate error of this disturbance observer

Assumption 3:
In (11), the derivative of the estimate error can be written by

Compared with the dynamic characteristics of the observer (10), Assumption 2 indicates that the uncertainties in (2) are slowly time varying such that
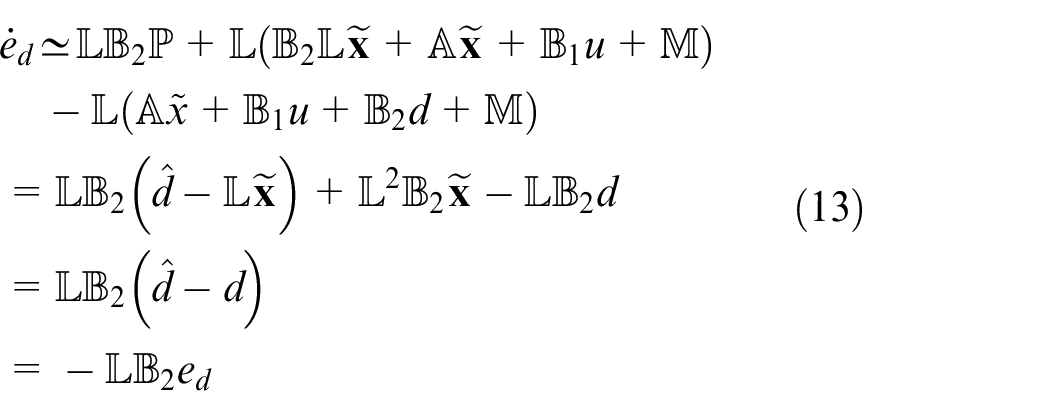
The solution of (13) can be calculated by

In (14), the vector
Apparently, the condition that
Controller design
In order to synchronize (8) by the smooth second-order SMC method, a sliding surface needs to be defined firstly.

Here the predefined constant

Substituting (8) into (16) yields

In (17), the disturbance term

Since the coronary artery system (8) is biological, not only may the dramatic change badly damage the coronary artery system, but also such change may cause the coronary artery diseases. This indicates that the control input
Here
Stability analysis
In (19), the output of the disturbance observer is involved in the smooth second-order sliding mode controller to achieve the chaos suppression of this coronary artery system. Due to the combination of the controller and the observer, the stability of this chaos suppression problem should be taken into consideration.
Replacing

Then, the stability of the coronary artery system (8) by the smooth second-order sliding mode controller (19) with the disturbance observer (10) is equivalent to the stability of (20).
Theorem 1: Take Assumptions 1, 2, and 3 into account; consider the bio-mathematical model of the coronary artery system (8); design the disturbance observer (10); formulate the sliding surface (15); the smooth second-order sliding mode controller has the form of (19). If
Proof: Select the following Lyapunov candidate

The derivative of
Substituting (20) into (22) yields
Now, the inequation
Case 1: For
Case 2: For
Case 3: For
Case 4: For
Case 5: For
In (23),
Remark: From the aforementioned discussions, for any
Simulation results
For the purpose of verifying the feasibility, the designed control method in this section will be carried out by a benchmark. Take the bio-mathematical model of a coronary artery system with uncertainties into consideration, where the system parameters in (3) are determined by
In (3), both the equations contain uncertainties. But their properties of the uncertainties are inherently different. Apparently, the term
In order to illustrate the validity of the designed control method, the mismatched term is set to
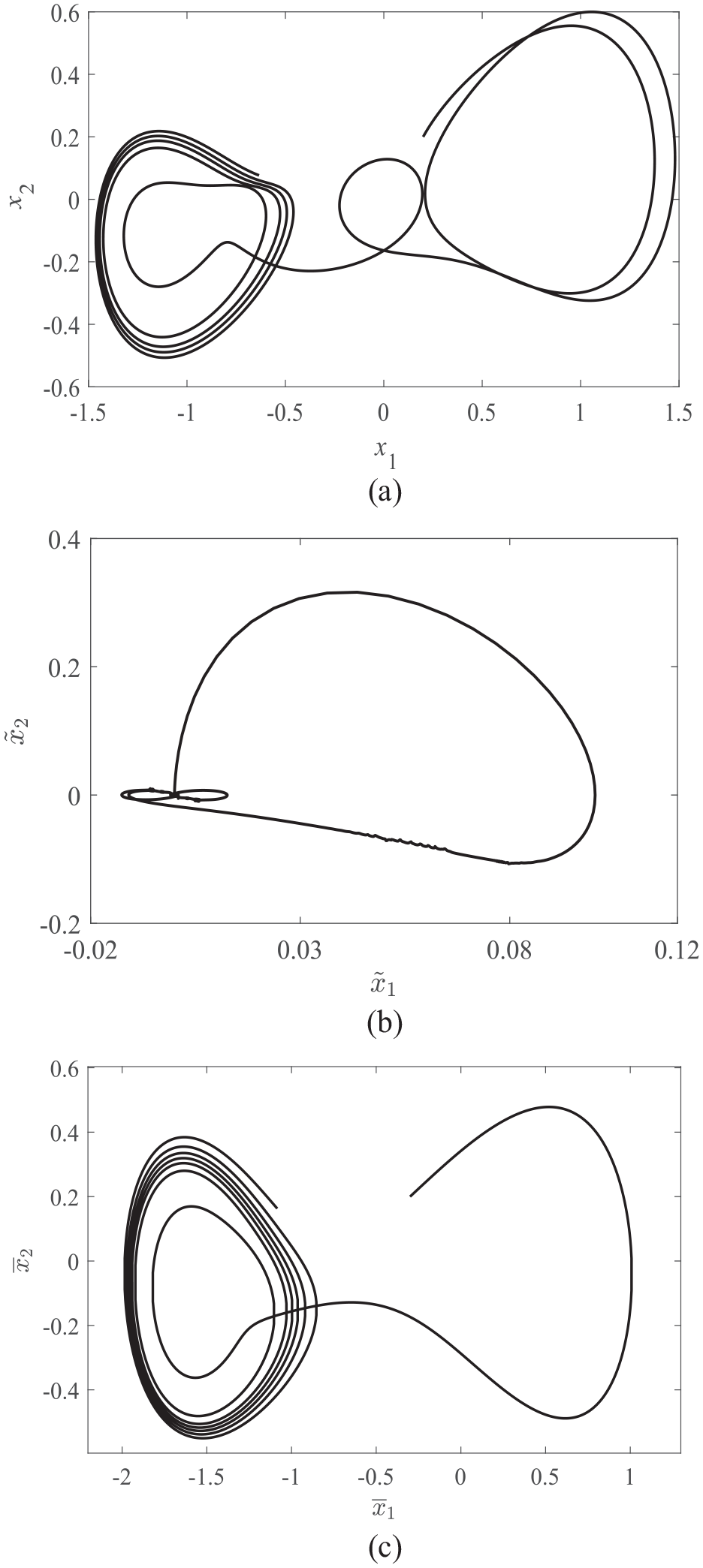
Phase plane trajectories of the uncertain system (3) under the effects of mismatched uncertainties, the error system (7) and the nominal system (4). (a) Uncertain system, (b) error system, and (c) nominal system.
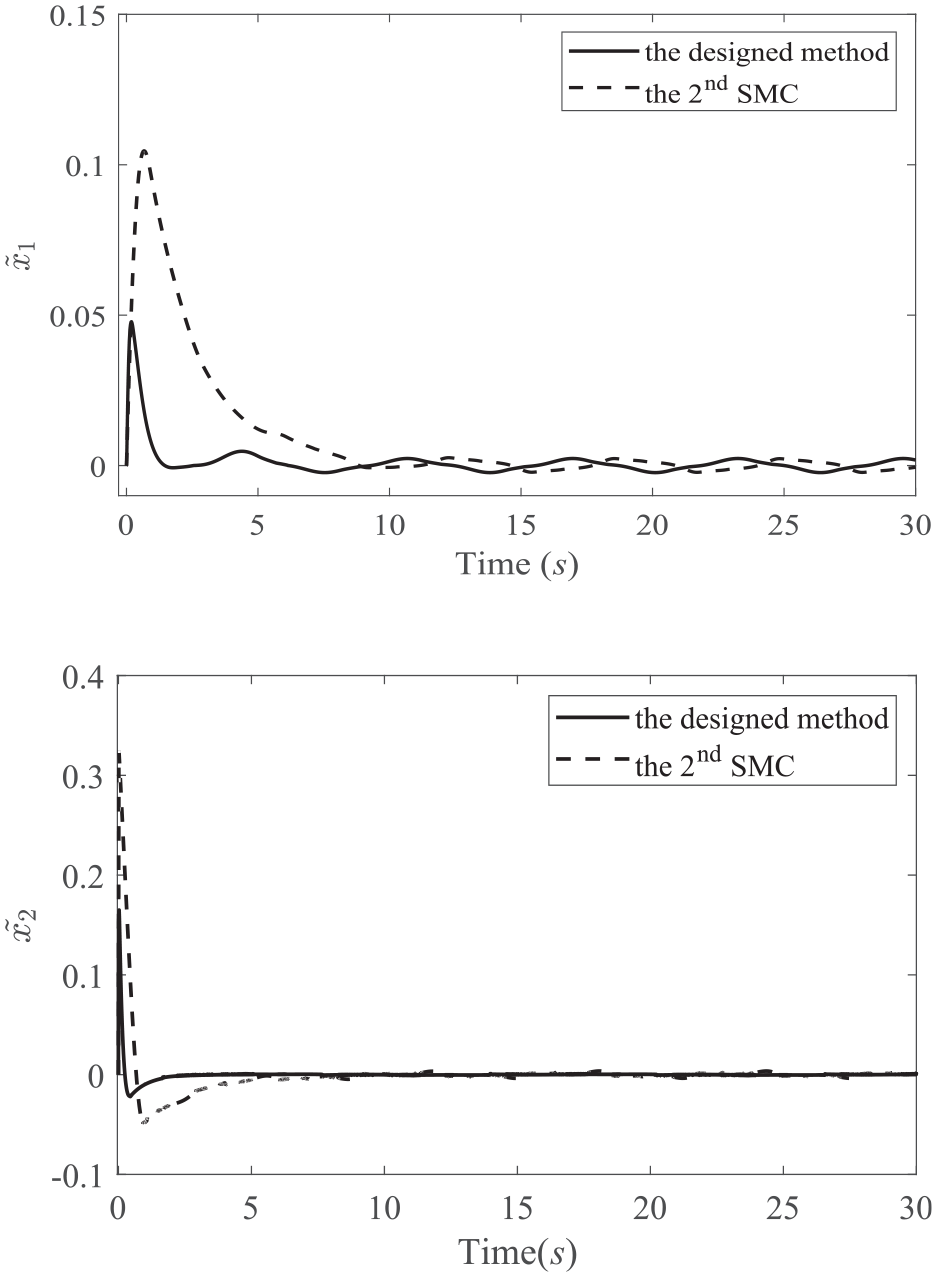
Error states in (7) by the designed control method.
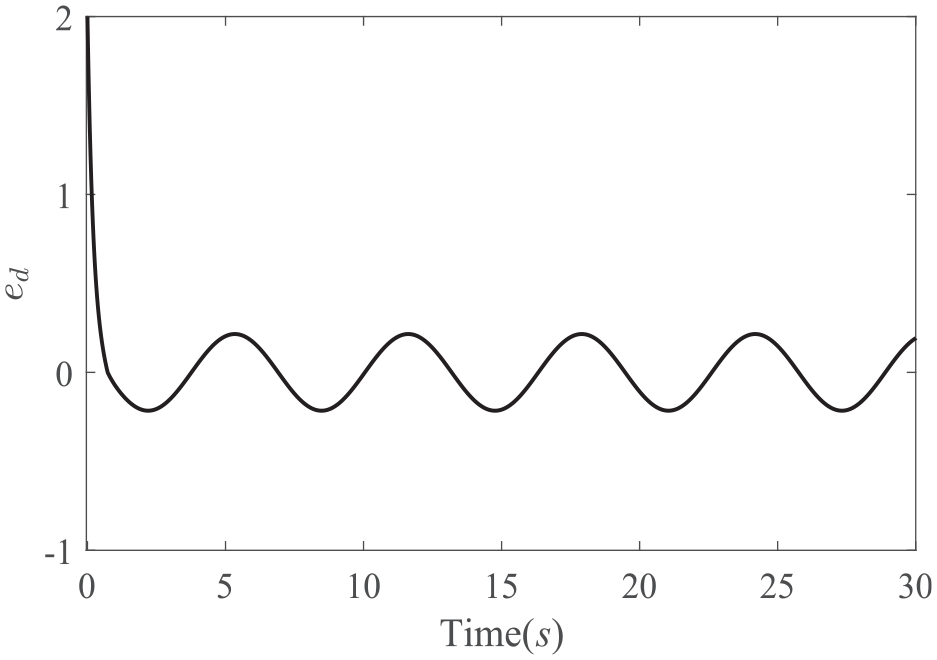
Error of the disturbance observer in (11).
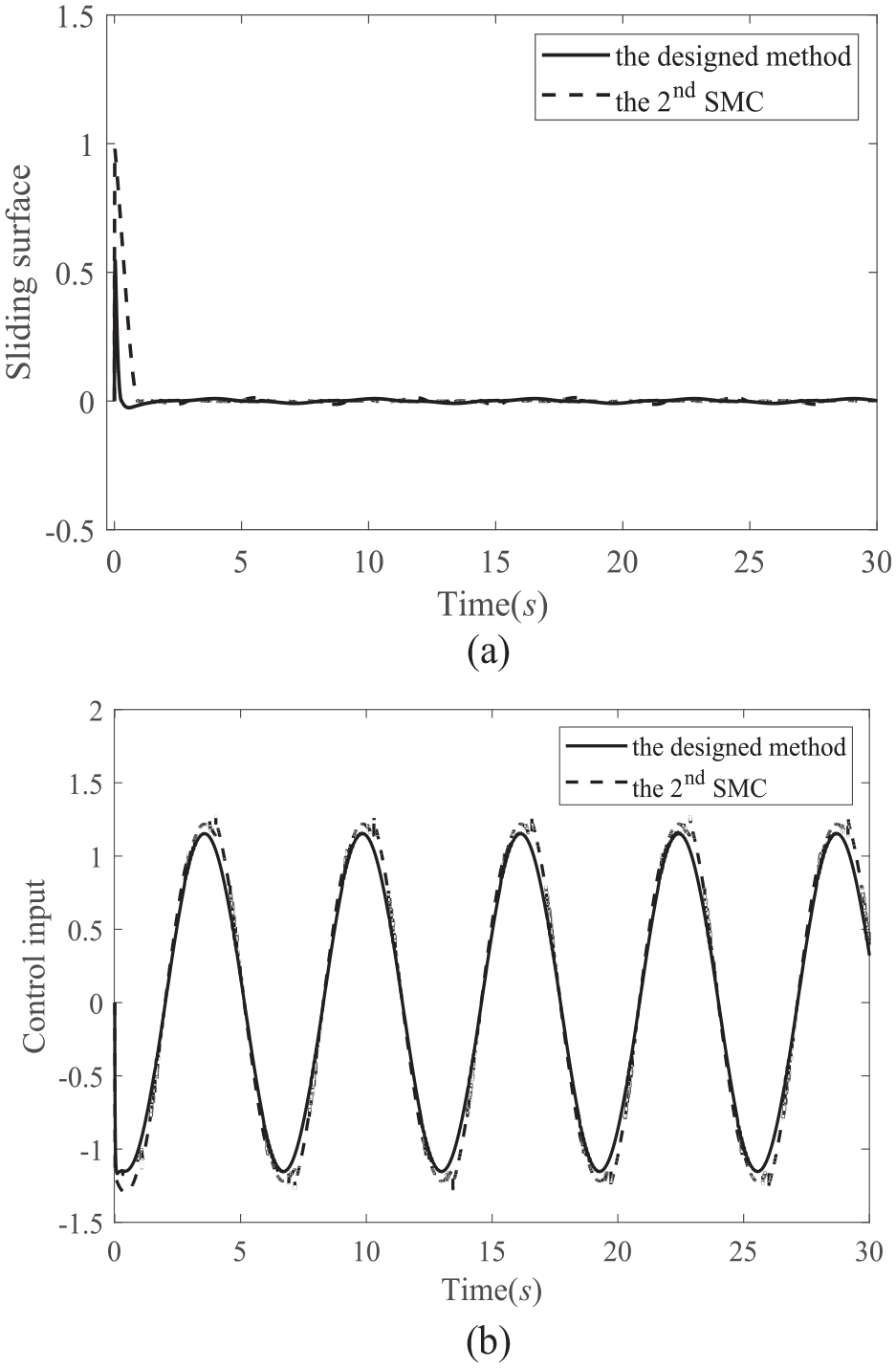
Sliding surface and control input by the designed control method: (a) sliding surface and (b) control input.
The results in Figures 4 to 7 indicate that the designed control method possesses the ability of dealing with the adverse effects of the uncertainties in the coronary artery system. The method is able to synchronize the uncertain coronary artery system with the nominal one. In practice, therapy can be considered as a control input for any disease. Such method is potential to develop a machine or medicine for therapeutic purposes in order to synchronize chaotic blood vessels with a nominal one.
Conclusions
Abnormal and fatal chaos of coronary artery systems is able to induce the coronary artery disease. This paper has addressed the chaos-suppression problem by the sliding-mode-based design. The mathematic model of the coronary artery systems is described by dynamics. Some insight into the model has been illustrated by bifurcation diagram, information entropy analysis, phase plane trajectory, and Poincaré section. Due to the uncertainties the coronary artery systems tolerate, the disturbance-observer technique is employed to estimate the uncertainties. The smooth second-order sliding mode controller is also explored to achieve the chaos-suppression problem with the assistance of this observer. The stability of the closed-loop control system with the controller and the observer has been proven via the direct Lyapunov method. Finally, some numerical results have been displayed to verify the feasibility and validity of the presented control design. Concerning the therapeutic purposes, such design is potential and instructive to develop a clinical pharmacy or to invent a medical device. Patients are also able to benefit from such design a lot to avoid the risks of coronary artery disease.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.