
Abstract
A novel design of robust constrained model predictive tracking control is proposed for systems with polytopic description. Unlike the conventional robust model predictive tracking control, the proposed method adopts an improved state space model in which the process state variables and tracking error are combined such that they can be tuned in the cost function optimization separately. Based on the proposed new model, more degrees of freedom are provided for the subsequent controller design, which leads to improved control performance. The relevant feasibility and robust stability issues are further discussed, and the effectiveness of the proposed approach is tested on the control of a system which is open-loop unstable with dead time and reverse responses.
Keywords
Introduction
Due to the advantages of convenience in dealing with various constraints, low requirements in model accuracy, and so on, model predictive control (MPC) has acquired a lot of progress in both theory and applications.1,2 However, with the increasing control requirements, there is also strict requirement for the control performance improvement of MPC strategies.
Disturbances and uncertainties exist in industrial systems inevitably, which cause the control performance of relevant controller to deteriorate to be unacceptable. In order to cope with these situations, many researchers contributed to the development of MPC schemes. A combined strategy of MPC and least squares online parameter estimation for the control of the hypnotic depth, measured by the Bispectral Index, under uncertainty was presented by Krieger and Pistikopoulos. 3 Ding and Pan proposed the robust MPC for a linear polytopic uncertain system with bounded disturbance and immeasurable states. 4 Robust MPC for uncertain discrete-time Takagi-Sugeno fuzzy systems with input constraints and persistent disturbances was considered in Yang et al. 5 In Ojaghi et al., 6 a new robust MPC control strategy in which the linear matrix inequalities are employed to acquire the corresponding feedback control law was developed for uncertain nonlinear systems. A predictive control formulation for uncertain discrete-time non-linear uniformly continuous plant models, where the controller output data are transmitted over an unreliable communication channel, was studied by Quevedo and Nešić. 7 In order to cope with the chemical processes with parameter uncertainty, the real time optimization and economic MPC objectives were combined to form a novel control algorithm in Santander et al. 8
For the nominal MPC scheme, its closed-loop stability has been solved by imposing artificial constraints in the optimization problem. 9 On the basis of the dual problem of an MPC optimization problem, a distributed MPC scheme was proposed for linear systems with local and global constraints by Wang and Ong. 10 In order to improve the feasibility and optimality of the off-line MPC strategy, Bloemen et al., proposed an on-line linear model-based MPC algorithm. 11
Among the existing MPC strategies, robust MPC is a significant branch. During the development history of robust MPC scheme, there are many representative results. As to the tracking problem in robust MPC subject to state and input constraints, some computationally efficient approaches were presented in Razi and Haeri. 12 By applying parameter-dependent Lyapunov function (PDLF), Cuzzola, Geromel, and Morari improved the technology presented in Cuzzola et al. 13 Inspired by the approach in Ding et al. 9 and Bloemen et al. 11 further improved the technique in Cuzzola et al. 13 Besides, the application of the robust MPC in the train regulation in underground railway transportation was investigated by Li et al. 14 In Rhouma and Bouani, 15 the robust MPC strategy was developed for the fractional-order systems with uncertain parameters.
With regard to the polytopic systems, the applications of robust MPC are also numerous. In Li and Xi, 16 the feedback MPC and an augmented polytopic uncertainty description were combined to design the robust MPC for the constrained polytopic systems. Adopting the polyhedral invariant sets, an off-line robust MPC was developed for the uncertain polytopic systems by Bumroongsri and Kheawhom. 17 For the polytopic systems under exogenous disturbance and constraints, the application of robust MPC strategy was discussed in Li et al. 18 In Muñoz-Carpintero et al., 19 the robust MPC scheme was presented for the polytopic systems with additive and multiplicative uncertainty. A fast ellipsoidal MPC approach was put forward for the polytopic systems under bounded disturbances by Casavola et al. 20
In Zhang et al., 21 a novel state space model structure in which process state variables and tracking errors are combined and regulated separately was introduced to improve the control performance of MPC strategy, and there are some subsequent results.22–24 Based on the improved state space model, there are more degrees of freedom for the relevant controller design and improved ensemble control performance can be obtained. In this paper, an improved robust constrained model predictive tracking control is proposed. The main contribution of this work include the followings: (1) A new state space model in which state variables and tracking error are combined and regulated separately is proposed. (2) The technique in Bloemen et al. 11 is also employed to formulate an N free control moves plus a linear feedback law based robust constrained MPC strategy, which leads to improved control performance. (3) Based on the proposed model structure and the subsequent control law derivation, the feasibility and robust stability analysis of the proposed scheme are further discussed. The effectiveness of the proposed MPC approach is tested on the control of a system which is open-loop unstable with dead time and reverse responses under uncertainty.
The chapters of this paper are organized as follows. The problem needed to be resolved is introduced in section 2. In section 3, the conventional robust MPC strategy is briefly discussed. The improved state space model based robust MPC scheme is presented in section 4. The numerical examples are discussed in section 5, and the conclusion is given in section 6.
Problem statement
Assume that an industrial system is time varying and a set of models are the candidates for its dynamics. However, it is possible to adopt one of the set of models to design the controller. Without loss of generality, the following nominal model (the kth model in the model set) is adopted to design the controller for the time varying system

with incremental input and state constraints

where
Suppose that

The subsequent robust MPC design is aimed at letting the process output track the reference value as closely as possible, and meanwhile maintaining the desired control performance under various uncertainties. The corresponding cost function is selected as
subject to

where
Here the receding horizon strategy is adopted, that is,
Traditional robust MPC strategy
Consider the state space model in equation (1), it can be rewritten as follows by adding the difference operator

Define the reference value as

For the traditional robust model predictive tracking control, we can obtain the formula of
then the general formula of
At the same time, the cost function in equation (4) is equivalent to
subject to

then the control law of traditional robust model predictive tracking control can be obtained by solving the optimization problem in equation (10).
Robust MPC with N free control moves
Model derivation
For the proposed robust MPC strategy, a novel state space model is adopted. Firstly, the formula of the new state space vector that contains the state variables and tracking error is selected as follows

then the new formulated state space model is

where

Here 0 in
Note that

Decomposition of the cost function
Consider the following cost function
subject to

where
Note that

where
thus the constraints in equation (17) can be transformed into the following formula further
The cost function in equation (16) can be divided into two parts
subject to (19) for all
and
subject to (19) for all
where
As for the infinite horizon optimization problem in equation (21), the linear state feedback control law is adopted.

Define the following quadratic function

where
meanwhile, suppose that for

Summing equation (24) from

hence the optimization problem in equation (21) is turned into the minimization of
Finally, the optimization problem in equation (16) is equivalent to
with respect to
Controller design
At first, the prediction of the process state is obtained on the basis of equation (13)
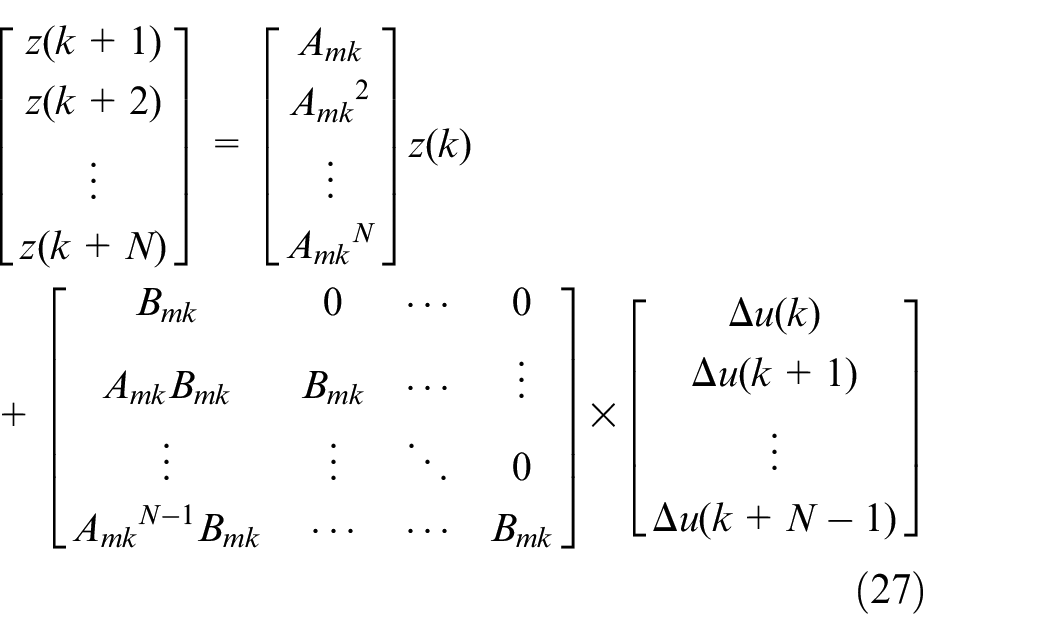
Further, equation (27) can be simplified as

where
then equation (26) can be rewritten as

where
If and only if there exist

and
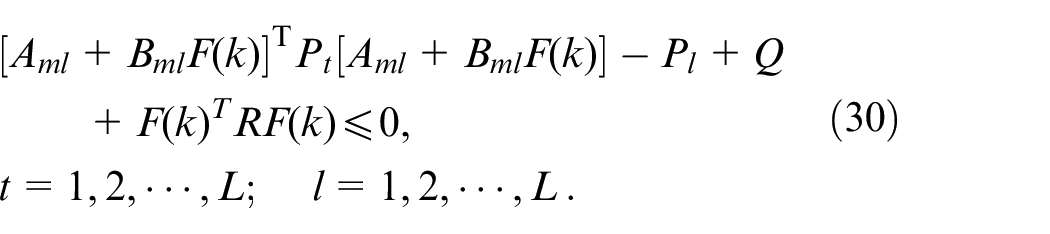
then equations (22) and (24) will be tenable.
Define

and

then the optimization problem in equation (29) is transformed as

subject to equation (19), equations (30)–(32).
Equations (30)–(32) can be converted into linear matrix inequalities (LMIs) by applying the Schur complement.
Define
Similar with equation (3),

then LMI of equation (31) can be described as
The same as equations (35)–(37),

and equation (32) can be rewritten as
Finally, the optimization problem in equation (33) can be transformed as

subject to equation (19), equation (34), equation (37) and equation (40).
It is clearly that the control inputs before horizon

where
Meanwhile, the control inputs beyond horizon


where
Hence, the whole optimization problem of the proposed robust constrained model predictive tracking control can be described as

subject to equation (19), equation (34), equation (37), equation (40) and equations (42)–(44).
At time instant
Robust stability analysis


where
Combing equation (26) and equations (46)–(47), the following formula is obtained.
where
Based on equations (23)–(24), the following holds.
Synthesizing equations (48)–(49), we can obtain
At time instant
This completes the proof.
Numerical example
Consider a nominal system which is open-loop unstable with dead time and inverse-response

where
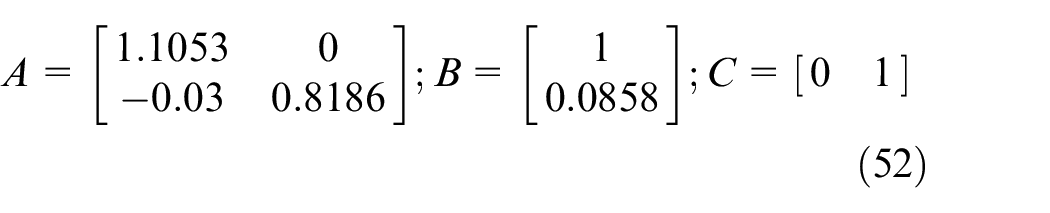
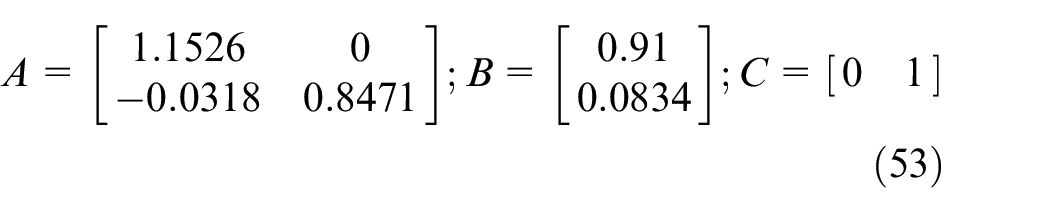
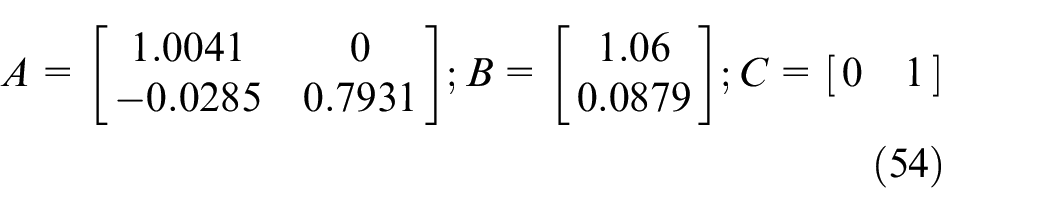
Since uncertainties exist inevitably in practice, and it is more meaningful to investigate the control performance of the proposed robust MPC strategy under uncertainties. In addition, equation (51) serves as the nominal model for the controller design of the industrial system, while in fact, the real industrial system dynamics will not be as perfect as the dynamics shown in equation (51). In view of this and to mimic this situation, two cases of the real industrial system, that is, model/plant mismatch cases, are generated through Monte Carlo algorithm as
Case 1:
Case 2:
Now, the controller will be designed using the model shown in equation (51) to control the real industrial systems shown in equations (53) and (54). Meanwhile, the traditional robust MPC strategy is introduced as the comparison. The set point of the controlled system is 1, and the control parameters of both MPC strategies are listed in Table 1.
Tuning parameters for both methods.
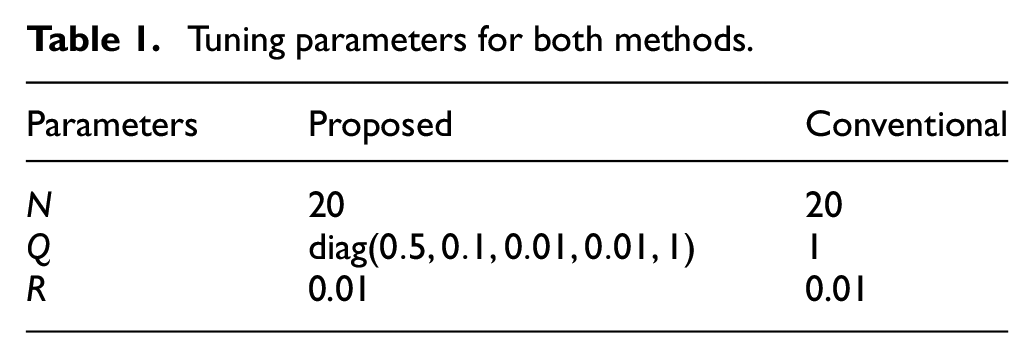
In equation (16), Q, R are the weighting matrix for the state variables and control inputs respectively. The output error and the state variables can both be regulated by tuning Q, so more degrees of freedom are provided and improved control performance can be achieved. Thus, the control parameters for the two MPCs are the same with N = 20, R = 0.01, and the output error weighting factors are both 1. For the proposed MPC the weighting matrix is
The relevant constraints are selected as

Figures 1 and 2 show the closed-loop responses under the two cases. In Figure 1, both methods achieve the set-point tracking successfully. The traditional approach shows bigger overshoot and oscillation. From an overall perspective, the proposed method provides better ensemble control performance with better control efforts. In Figure 2, set-point tracking under constraints was still achieved for the proposed methods, and it is obvious that responses of the proposed strategy are smoother with smaller overshoot, but the oscillation of the traditional approach is drastic. It is easy to find that the incremental control input is kept in the range of the given constraints, which verified the superiority of the proposed approach further. In a word, the proposed method shows better control performance.
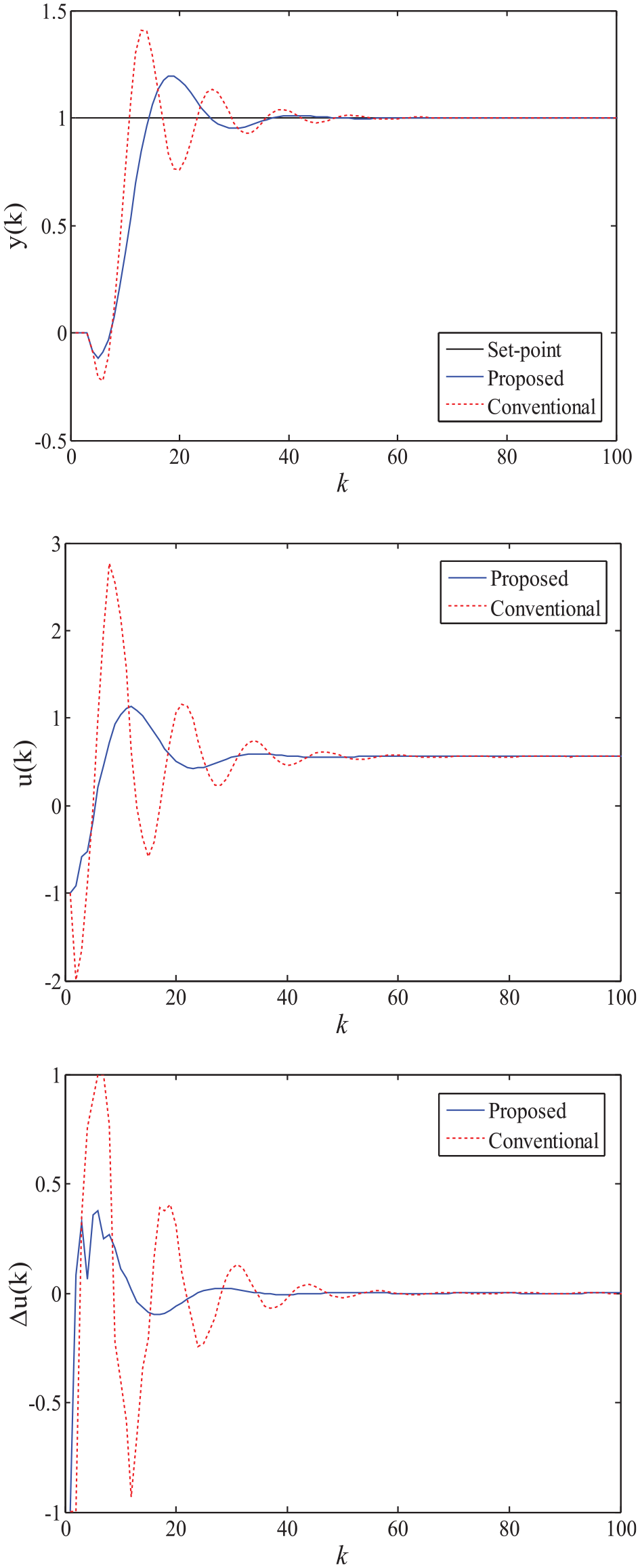
Closed-loop responses under case 1.
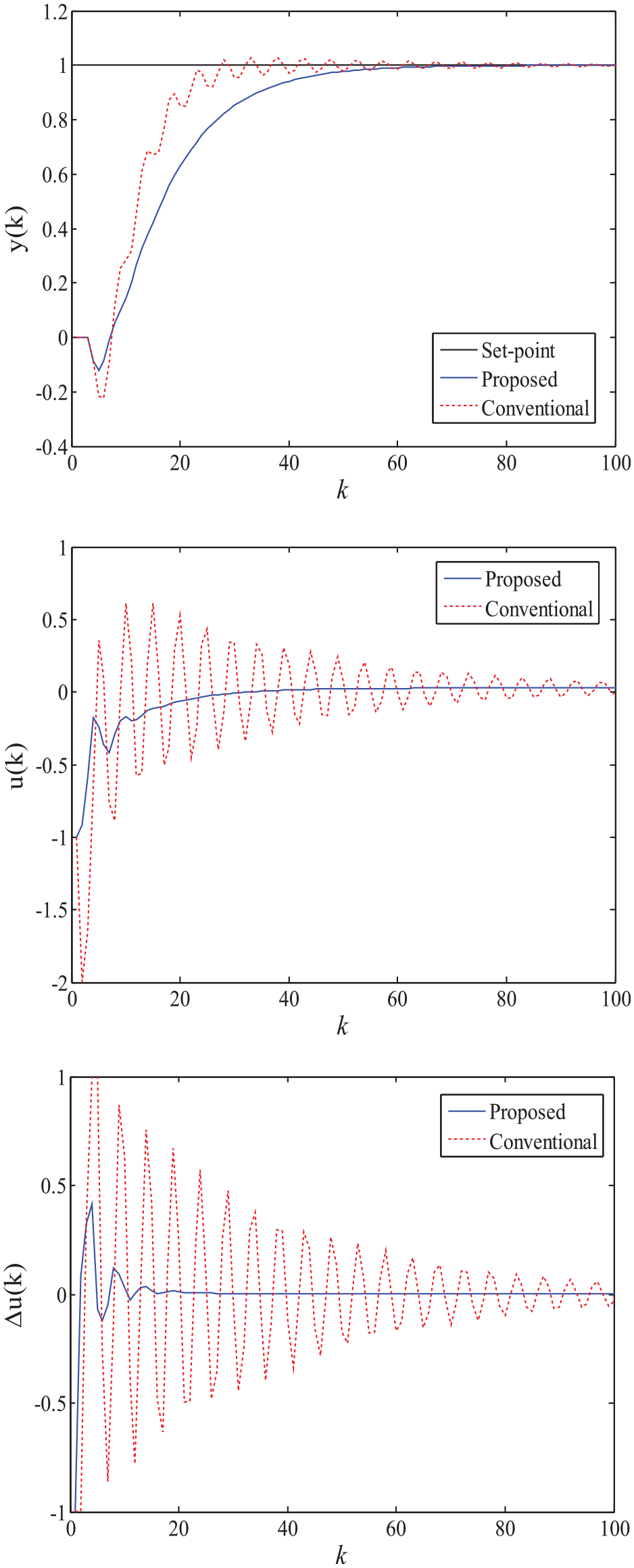
Closed-loop responses under case 2.
Conclusion
An improved robust constrained model predictive tracking control is proposed for the systems described by polytopic description in this paper. In the framework of the proposed method, a novel state space model in which state variables and tracking error are combined and regulated separately is adopted such that more degrees of freedom are provided for the subsequent controller design. The effectiveness of the proposed strategy is tested on a open-loop unstable system with dead time and reverse responses.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: Part of this project was supported by Zhejiang Provincial Natural Science Foundation of China under Grant LZ22F030001.