
Abstract
Based on a modified min-max optimization strategy, an improved design of model predictive tracking control (MPC) is proposed to guarantee the performance of industrial process control systems when the networked system suffers from communication faults. Packet losses and uncertainties exist in the networked control system, which may deteriorate the performance of the systems and even cause a safety accident. To handle with this problem, an extended state space model is utilized in the proposed MPC design for enhancing control performance firstly. Then an improved min-max optimization approach is adopted for obtaining the optimal solution of the corresponding MPC method, where two separate optimization steps are proposed to enhance the control system operation. Different from MPC strategies that employ traditional state space models, the state variables can be tuned additionally for the modified MPC design because the tracking error information and the state variables are united in the improved model. As a consequence, extra degree of freedom is acquired for the relevant MPC scheme, and then better control performance is expected. Simulations on the temperature regulation process under model/plant mismatches and packet losses are simulated to evaluate the validity of the proposed MPC method finally.
Keywords
Introduction
Networked control system is very widespread in industrial processes since the relevant network communication technology has been put forward. In networked control systems (NCSs), there is a real-time shared media network through which controllers, plants, sensors, and actuators exchange the system information with one another. 1 For NCSs, the installation and maintenance costs are lower, such that numerous applications have been completed in practice. 2 It is known that the quality of the information transmission in the network affects the whole system performance significantly. 3 Unfortunately, packet losses and other uncertainties are inevitable in industrial processes due to many unexpected factors, and the system performance may be deteriorated to be unacceptable. In order to handle with such problems, many significant viewpoints have been addressed. 4 With the increasing demand on the performance for NCSs, how to ensure acceptable system performance under various adverse conditions is still an open topic.
For the packet losses occurred in NCSs, it can be regarded as the module failure to some extent, and this promotes the research of fault-tolerant control (FTC) schemes. 5 It is known that FTC strategy aims at guaranteeing the acceptable performance for systems under various module faults. Many representative contributions for NCSs have been put forward.6–8 For singular NCSs with communication problems, a reliable sampled-data FTC strategy was presented in Sakthivel et al. 9 Thought reliable sampled-data controller got by LMI, an optimized upper bound of the predefined performance index under the faults is guaranteed. On the basis of the integral sliding mode method, Hao et al. presented an ISM quantized feedback control strategy for uncertain linear NCSs by mathematical tools and adaptive method. 10 In Qiu et al., 11 the framework of FTC method and self-triggered fault diagnosis was proposed. The fault diagnosis observer was used for estimating the fault and state and the corresponding controller can guarantee the stability of the system under the self-triggered sampling mechanism.
Besides FTC, other promising control strategies are also introduced and developed to cope with NCSs under packet dropouts and uncertainties. 12 In Cuenca et al., 13 a packet-based dual-rate control strategy is proposed in which the slow-rate PI controller and fast-rate PD controller are independent of each other and cooperate with each other to deal with packet dropouts and packet disorder. The convergence of iterative control for NCSs which contain multi-agents with different dynamics and dissimilar uncertainties was studied in Devasia. 14 Acceptable modeling uncertainty and convergence conditions of the model-inversion-based, iterative control approach are given for collaborative tracking. In order to save network resources and deal with the uncertainty of parameters and the delay of network transmission, Pan and Yang 15 proposed the dynamic output feedback control design. ET method is adopted for saving the limited network sources and the dynamic output feedback controller is used for coping with the problem such as network-induced delay and mismatched membership functions. For better disposing the network communication problem such as the time delays and packet losses, the min-max MPC method was studied when constrained nonlinear NCSs suffer from external disturbances. 16 Different with Li and Shi, 16 Razavinasab et al. 17 adopted a cooperative distributed MPC scheme to deal with network issues in a large-scale system composed of many subsystems. This approach uses multiple MPC controllers rather than one MPC controller. Network communication problem is an inevitable problem. If handled improperly, it may lead to the decline of key index control performance, or even cause security accidents. Many scholars devote themselves to the study of network communication problem and adopt various methods to reduce its influence on the control performance.18,19
Among these significant control strategies, min-max MPC is valid in dealing with various uncertainties and guaranteeing the system stability, and there have been plenty of important results in recent years. 20 For a productive process with uncertain and additive disturbances, Gao and Ning Sun proposed a method to assess the explicit state feedback solution. 21 Through synthesizing the quadratic performance indicator and the robust reformulation of constraints, the issue was converted into a multiparameter programming issue. Kim and Lee, 22 a two-stage method was developed for LPV systems with input saturation. The process state variables are actuated into a prescribed neighborhood of the origin firstly by MPC method and then those state variables were driven to the equilibrium point by terminal output-feedback robust controller. Witheephanich et al. 23 put forward a min-max MPC method which is efficient in computation for the robust power management. By solving the mpQP problem, the solution of the explicit controller is obtained. In order to expand the applicability of the constrained min-max MPC method, Gao and Chong developed an algorithm 24 by partitioning the state space into polyhedral regions which converted the on-line implementation into an off-line explicit assessment. By using an approximation multi-parametric nonlinear programming scheme, the explicit min-max MPC optimization was derived to regulate the uncertain constrained nonlinear systems under disturbances. 25
However, most of those methods solve the network problems such as packet loss from the perspective of model switching, fault identification or control direction. Few methods start from the model itself, namely to reduce the influence of network problems on the control system through optimizing process model. Based on such backgrounds, a modified state space model26–28 which synthesizes the output tracking error and the relevant state dynamics is presented in this paper, and extra degrees are offered for the proposed min-max MPC via tuning the state variables in the relevant objective function additionally. Then a systematic MPC controller design using two separate steps of min-max optimization is proposed. The validity of the improved min-max MPC is verified on the networked temperature process under packet dropouts and uncertainty.
The main contributions of this paper can be summarized as follows.
An extended state space model is adopted to describe the process model. Compare with traditional state space model, an extra degree of freedom is acquired to get better control performance.
An improved min-max optimization approach is proposed for getting the optimal solution of the MPC controller based on the extended state space model under constraint conditions. In the improved min-max optimization, two separate optimization steps are proposed to enhance the control system operation.
The proposed method can deal with packet losses existing in the networked control system, the validity of the proposed MPC method finally are proved by the simulations on the outlet temperature of the radiation room under model/plant mismatches and packet losses.
The article is constructed as follows. In section II, the corresponding problem formulation is described and a brief introduction of conventional min-max MPC schemes is illustrated in section III. Section IV shows the derivations of the proposed MPC. In section V, the case study on the temperature control is simulated for verifying the validity of the proposed MPC method. The conclusions of this paper can be seen in section VI.
Problem formulation
The coke furnace
The workflow of the industrial coke furnace (F101/3) is seen in Figure 1. At the beginning, two branches (FRC8103/4), which are divided from the residual oil, are sent to the convention room for preheating. After preheating, the preheated branches will mix and go to the fractionating tower (T102). When this process is completed, two flows (FRC8107/8) will be mixed (also called circulating oil). Then they will flow to the radiation room in which these branches will be heated to 495°C. The two flows will join together after the heating process is finished, then coke removing will be proceeded for the mixed oil in coke towers (T101/5,6). It is known that another substituted coke tower will take effect when the current coke tower is full because only one coke tower is operative in the process.
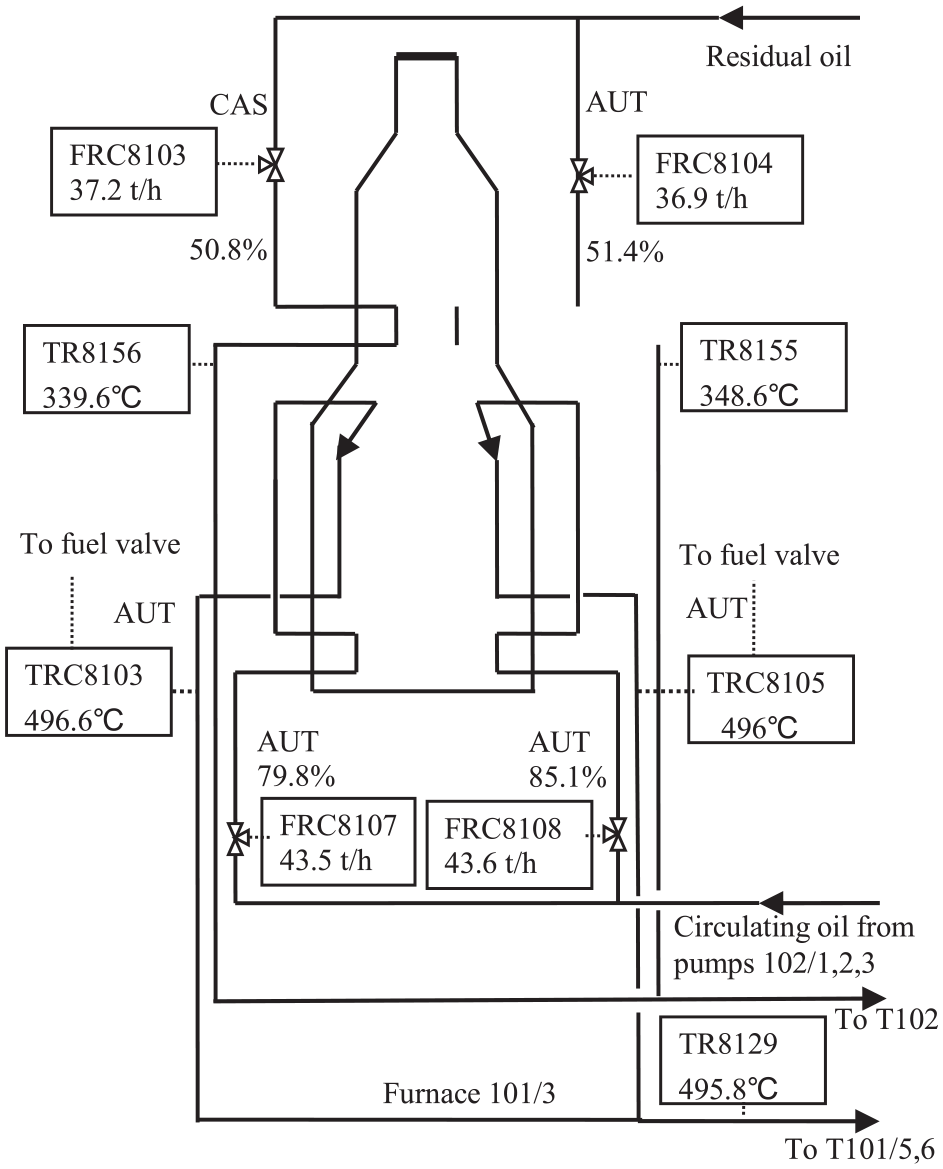
Process flow of the coke furnace (F101/3).
The control objective
As a key indicator of the coke furnace, the outlet temperature of the radiation room plays an important in the product quality. To ensure the efficient and safe operation in the whole coking procedure, its dynamic performance and stability performance should be as excellent as possible. In the coking process, there are many disturbances, such as the changes of residual oil flow and oil temperature and the switch of coke towers, which affect the temperature control performance. Meanwhile, the packet dropout is another factor that impacts on the system performance greatly. Note that the problem of packet losses between the information transmission is inevitable. In general, there are two familiar kinds of packet dropouts, that is, packet dropouts occur for process states which are transmitted to controller from sensor (S-C) and packet losses in control signals transmission from controller to actuator (C-A). Thus, how to achieve the accurate control of the outlet temperature and guarantee the acceptable system performance under various uncertainties and packet dropouts are still challenges.
The definitions of two kinds of packet dropouts in NCSs are expressed as follows.


where
The output of the controller, the input of the process, the state of the process and the input of the controller are defined as

Remark 1: From equation (3), we can easily find that the input of the controller will be the same as that of the previous sample time if packet dropouts take place in S-C aisle, that is,
A min-max MPC strategy will be designed to guarantee control accuracy of the outlet temperature system under uncertainties and packet losses.
Conventional min-max MPC
A simple single-input single-output (SISO) discrete model is employed in the sake of simplifying the corresponding derivation process.
where
The incremental form of equation (4) can be got by adding a difference operator
We construct a state vector
then the non-minimal form of equation (4) is

where


Assume that

Define

By synthesizing equation (7),
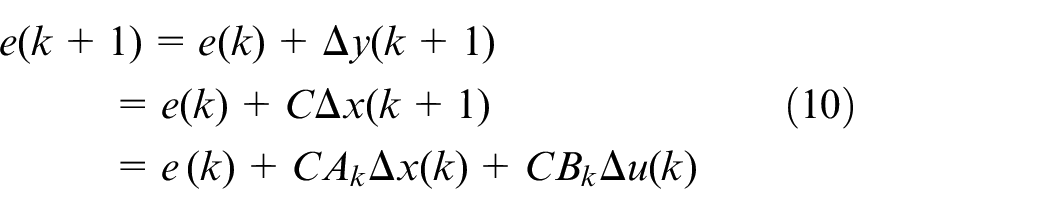
On the basis of equation (7) and equation (10), the tracking error prediction
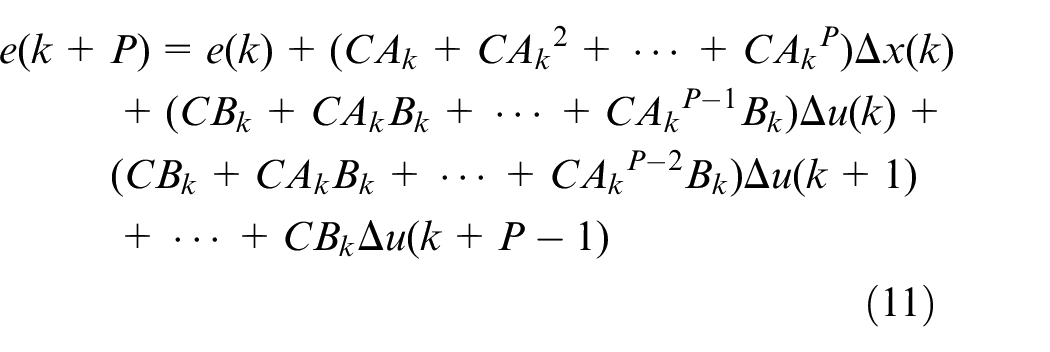
where
The subsequent MPC scheme is aimed at ensuring tracking performance of the NCS in case of uncertainties and packet dropouts. Moreover, the output of MPC scheme should subject to various constraints. Hence, the following performance index is adopted.
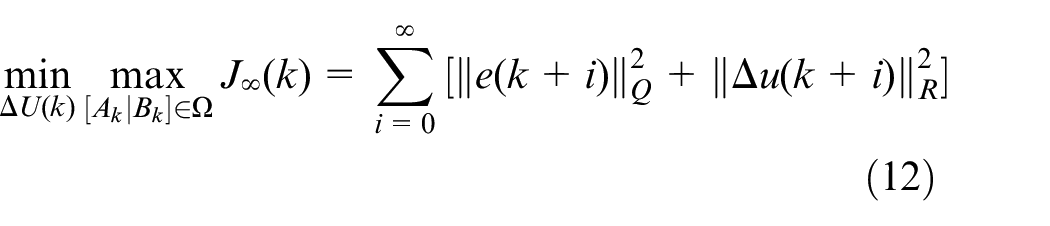
subject to
where
Through solving equation (12), the optimal control under the conventional min-max MPC approach can be obtained finally.
Proposed min-max MPC
Extended state space model
By the SISO process described in equation (4), the state space model in equation (7) and
Further, we construct

then the corresponding extended state space model is

where

0 in
Here, the relevant polytopic description for

MPC Design
In order to derive the proposed controller, an improved switching scheme in Ding et al. 29 is employed.
The following performance index is utilized
subject to
where
Based on equations (9) and (15), the following formula can be obtained.

where
equation (19) is equivalent to the following formula.

Remark 2: By uniting equations (14) and (18), the process state can be tuned additionally for the proposed MPC method by adopting the extended model in equation (15), thus extra degrees can be obtained for the corresponding MPC approach.
Refer to Ding et al., 29 the following two parts are divided from the objective function in equation (18).
s.t. (21) for
and
s.t. (21) for
where
Remark 3. Due to the state vector of the extended state space model involving the tracking error, the tracking problem is considered in equation (18). Meanwhile, an enhanced control performance is obtained based on the extra degrees in the proposed MPC method.
The following feedback control law is utilized for the infinite part of optimization in equation (23).

Define a quadratic function

where
At the same time, suppose that the following robust stability constraint is satisfied for

By summing equation (26) from

Thus, equation (23) is transformed into the problem of minimizing
Then the performance index in equation (18) can be rewritten as
with respect to
By employing the improved model in equation (15), the corresponding formula of state prediction can be got easily.
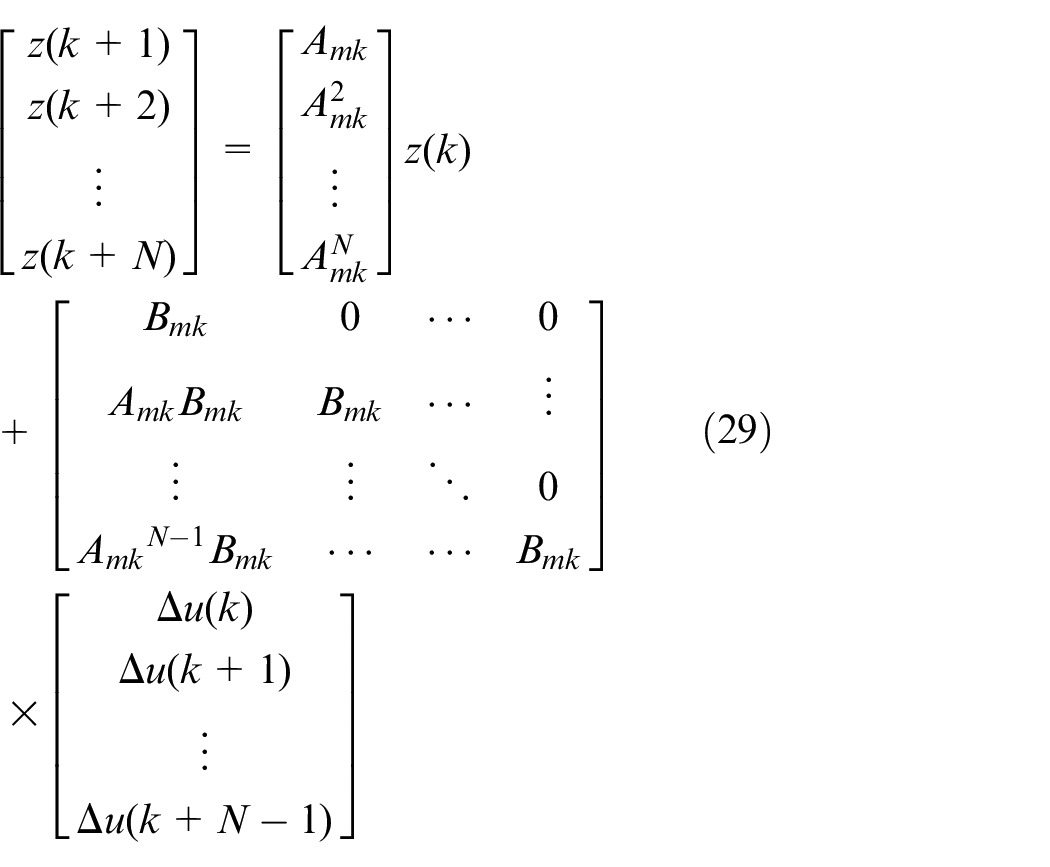
Further, equation (29) can be transformed as

where the relevant items can be known easily form equation (29).
Then the performance index in equation (28) is equal to
where
Suppose that there are only a series of symmetric positive matrice

and
equations (24) and (26) will be tenable.
Denote

and

then the performance index in equation (31) is addressed as

subject to equation (21) and equations (32)–(34).
For equations (32)–(34), they can be converted into the corresponding linear matrix inequalities (LMIs) using the Schur complement, and the details are as follows.
Denote
where
Similar with equation (8), the following polytopic description is acquired for

For equation (33), we have the following LMI
Meanwhile, we can gain the following polytopic description for

then LMI for equation (34) is
Finally, the performance index in equation (35) is rewritten as

s.t. equations (21), (36), (39), and (42).
For the control input increments before horizon
where
As to the input increments after switching horizon
To satisfy the constraints beyond horizon


where

Finally, the whole min-max optimization problem is presented as

s.t. equations(21), (36), (39), (42), (44)–(46).
By solving equation (47), the optimal solution for the proposed min-max MPC approach is derived.
Case study
The transfer function of the temperature in the coke furnace 31 is

Select the sample time as 50 s, then the corresponding discrete model is

To simulate the inevitable uncertainties in practice and evaluate the proposed min-max MPC strategy, two model/plant mismatched cases are generated through Monte Carlo simulation.
Case 1:

Case 2:

At the same time, packet dropouts happened in S-C aisle and C-A aisle with the rates of 10% and 5%, respectively, are also considered.
The set-point of the control system is 1, and the corresponding constraints are
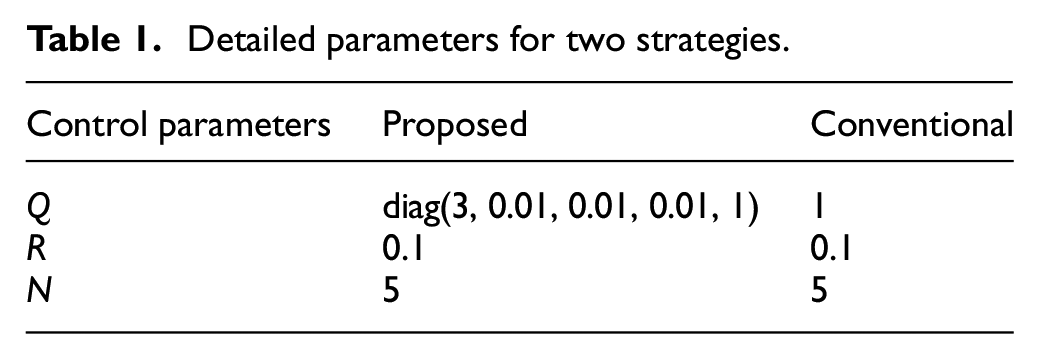
For evaluating the proposed MPC scheme further, the traditional min-max MPC approach is introduced as the comparative method. Table 1 shows the corresponding detailed control parameters of the two methods.
Detailed parameters for two strategies.
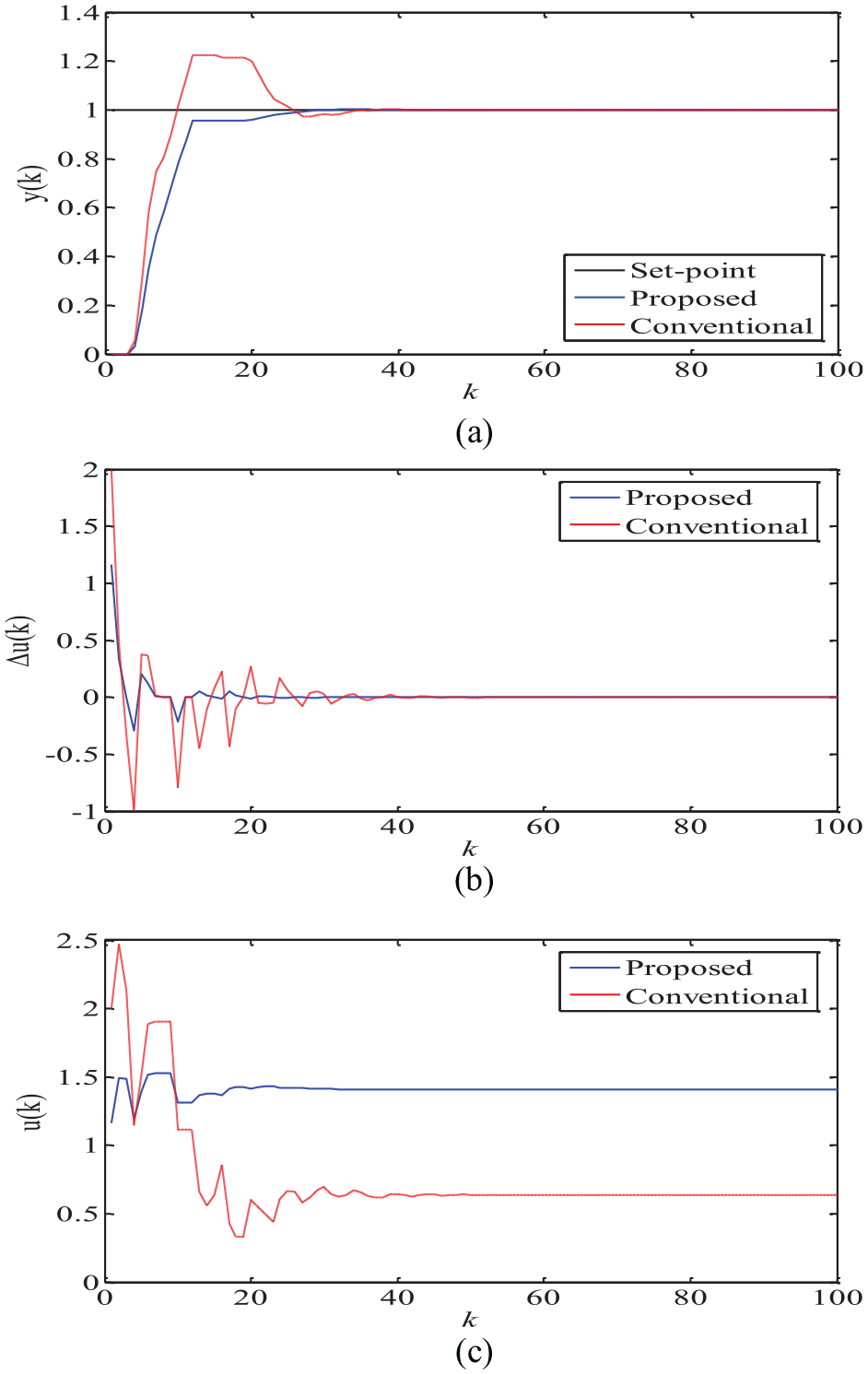
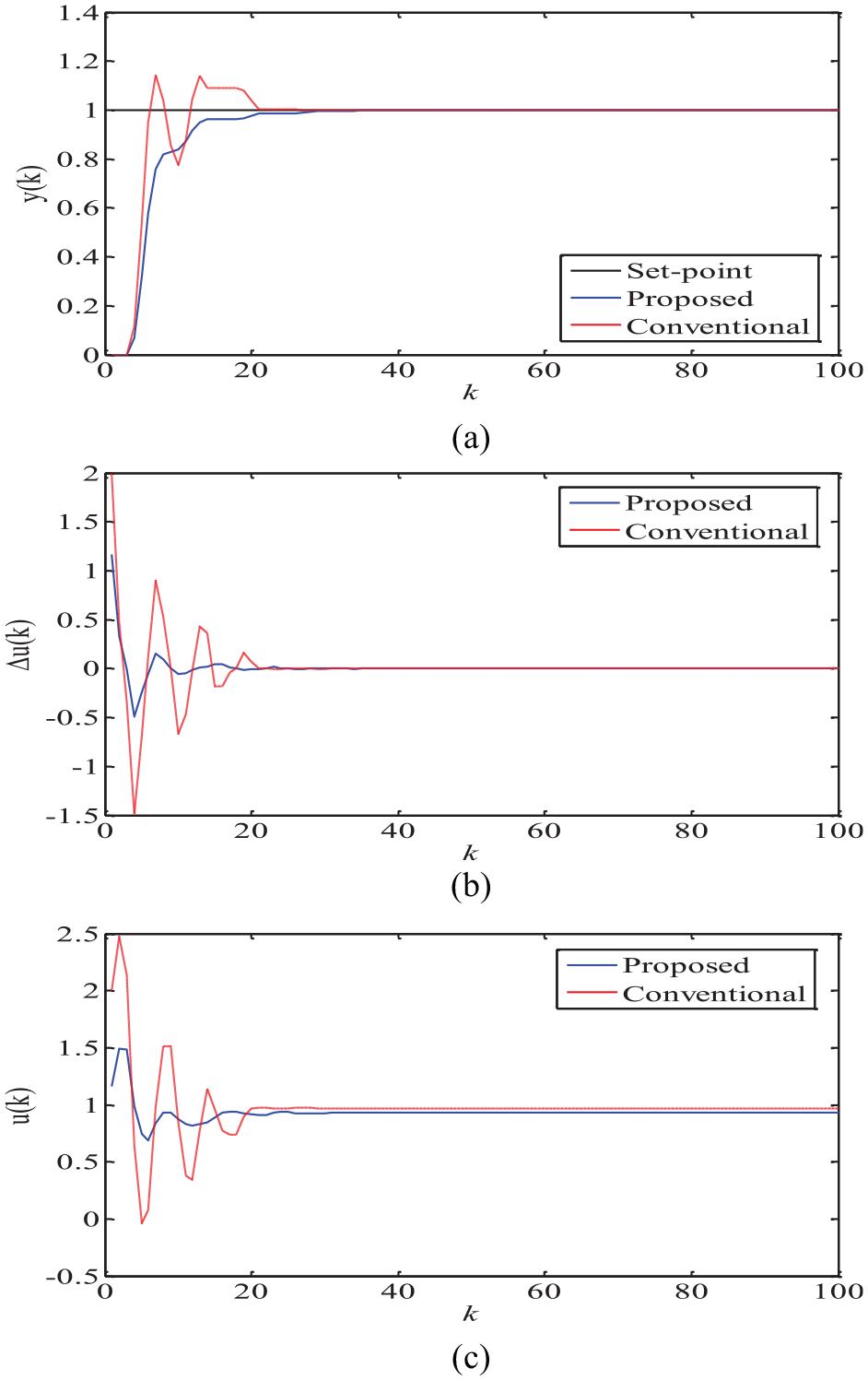
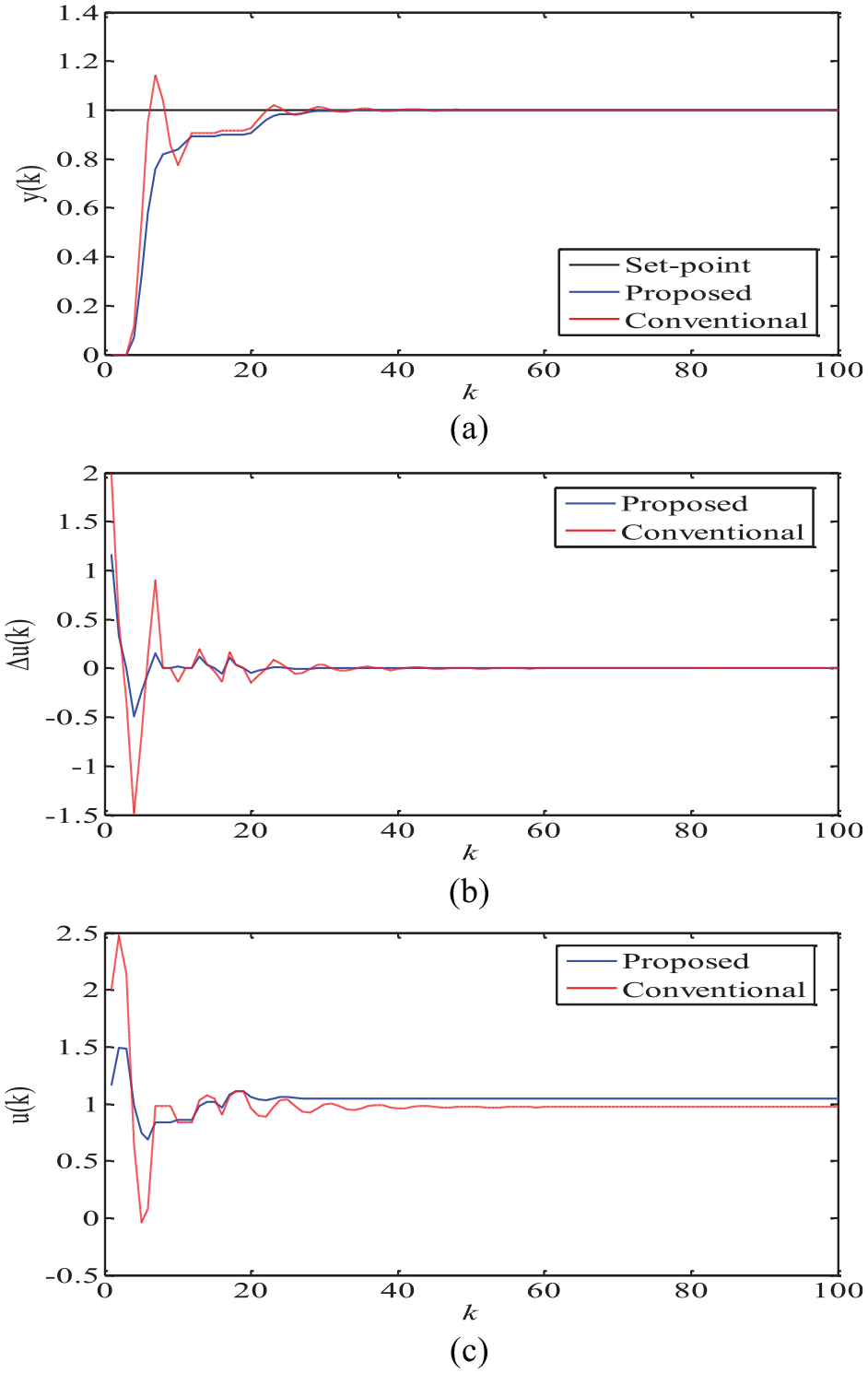
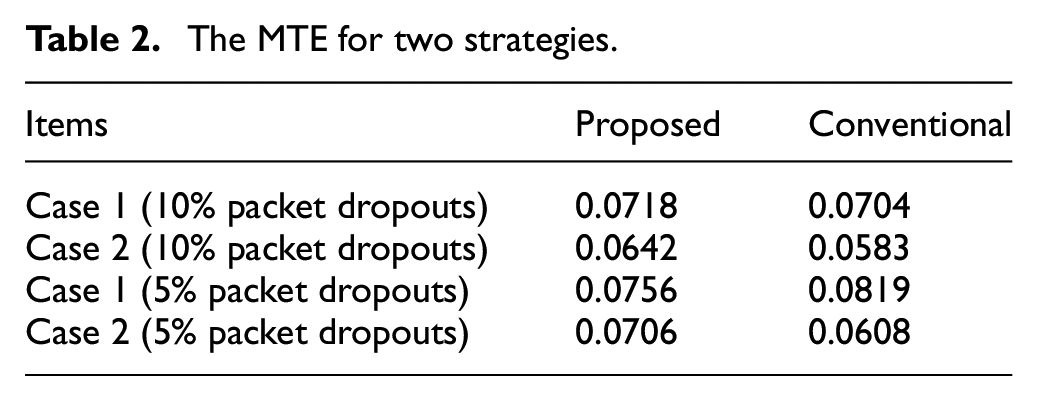
Figures 2 to 5 display the input/output response figures for case 1 and case 2. It is clear that set-point tracking is achieved for both schemes under two kinds of packet dropouts. From Figure 2(a), we can obviously find that enhanced control performance is achieved in the proposed scheme, because both oscillations and overshoot in the output of the traditional method are more serious. In Figures 3(a) and 5(a), the conditions are analogous to those in Figure 2(a). The proposed approach shows smoother responses with more mild oscillations and overshoot. Meanwhile, the input signals and input increment signals of the conventional scheme in the corresponding figures are more drastic, which also implies that the modified ensemble control performance is acquired. For the developed strategy, the aforementioned smoother dynamics are obtained through the extra weighting of output changes and input movements. Table 2 lists the mean tracking error (MTE) values for both strategies, and we can easily see that their results are close. In short, the proposed MPC provides an improved control performance.
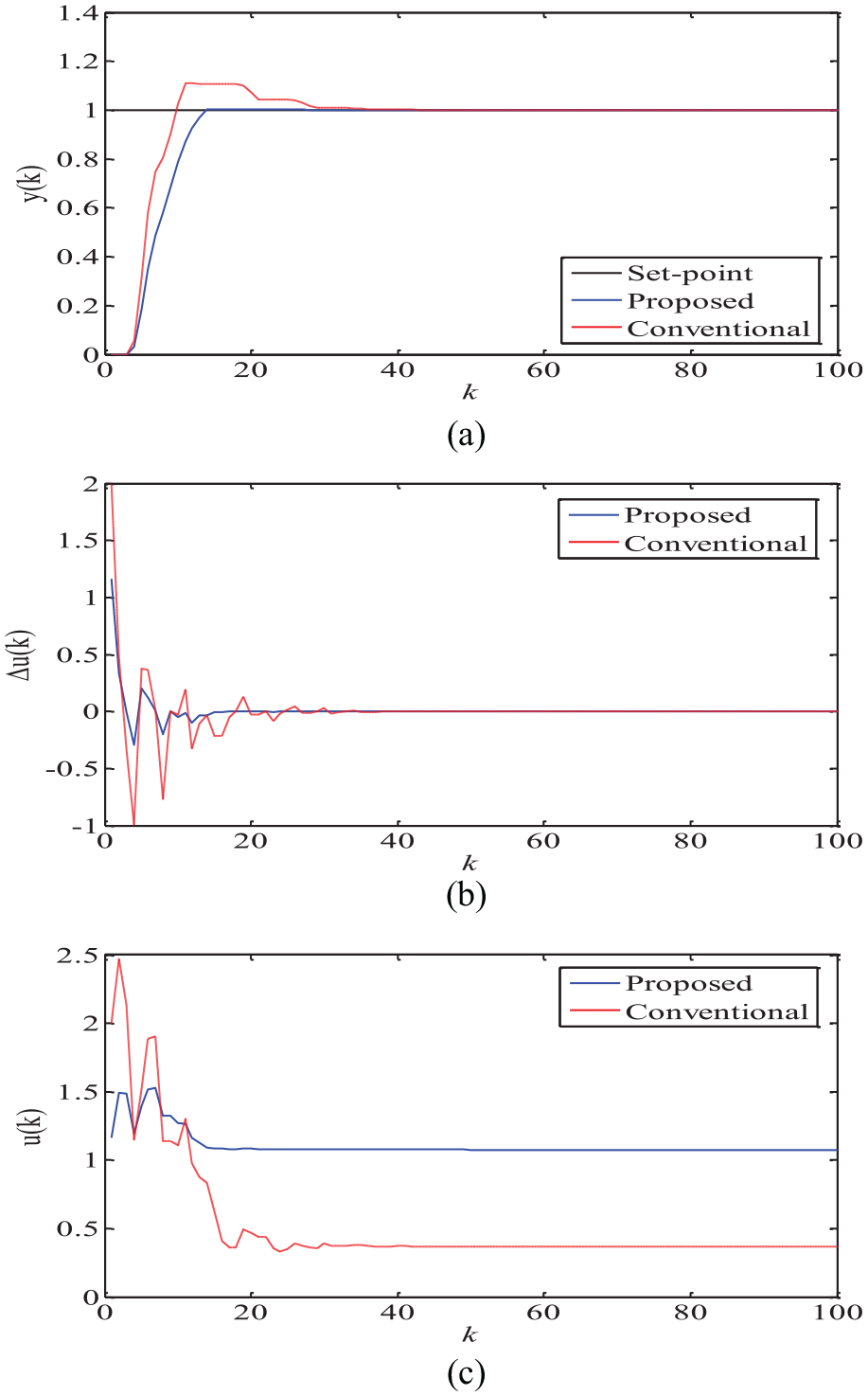
(a) Responses of output for case 1 under packet dropouts (10%), (b) input increment signals for case 1 under packet dropouts (10%), and (c) input signals for case 1 under packet dropouts (10%).
(a) Responses of output for case 1 under packet dropouts (5%), (b) input increment signals for case 1 under packet dropouts (5%), and (c) input signals for case 1 under packet dropouts (5%).
(a) Responses of output for case 2 under packet dropouts (10%), (b) input increment signals for case 2 under packet dropouts (10%), and (c) input signals for case 2 under packet dropouts (10%).
(a) Responses of output for case 2 under packet dropouts (5%), (b) input increment signals for case 2 under packet dropouts (5%), (c) input signals for case 2 under packet dropouts (5%).
The MTE for two strategies.
Conclusion
A new min-max MPC is proposed to guarantee the performance of industrial process control systems when the networked system suffers from communication faults. By introducing a new extended state space process model where state variables and tracking error are united and adjusted independently, additional degrees of freedom are provided for the corresponding control. With such merit, smoother dynamic performance and more accurate steady-state performance are provided by the proposed method. The validity of the developed MPC algorithm is verified on the coke furnace under finally. However, compared with a single input single output system, multiple input multiple output system is more universal in practical industrial processes. Meanwhile, if the proposed method combined with such strategies as model switching and fault-tolerant control, a more satisfactory result may be achieved. These issues will be our future topics of research.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Ningbo Science and technology innovation 2025 major project (Grant No. 2019B10079).