
Abstract
Over the past few decades, there have been increasing research activities in fault diagnosis (FD) and fault-tolerant control (FTC) for switched hybrid systems. This paper addresses the problem of active-fault tolerant control (AFTC) for switched hybrid systems subject to actuator faults to enhance system security and keep system stability. The proposed FTC is designed by adding the state feedback control with integral action to an additive control law which requires accurate fault estimation to compensate for the fault effect. Thus, a data-based projection method (DPM) is extended (EDPM) based on inputs and outputs measures to estimate the fault without using mathematical models. The synthesis of the state feedback control with integral action is proposed for recovering the desired performances. It integrates a set of controllers corresponding to a set of partial models to design a set of switching control laws. Indeed, new linear matrix inequalities (LMIs) using Lyapunov stability analysis are proposed to find the optimal values of the control gains matrices and keeping system stability. A comparative study of the proposed FTC with existing work is given to show the effectiveness of the proposed technique.
Introduction
Switched systems belong to hybrid systems, which are characterized by many subsystems (modes) and a switching rule specifying the switching between them. 1 Over the past few decades, the synthesis and the study of the control of switched systems received much attention because of their applications in several practical engineering systems, namely, power electronics, chemical processes, network systems, DC/DC converters, and so on. 2 Many achievements have been proposed, readers can refer to Sun and Ge, 3 Ocampo-Martinez and Puig, 4 and the references therein. However, real industrial processes are unavoidably affected by unexpected faults in actuators or sensors. When a fault appears, the characteristics of the system causes changes, and enduring the instability. 5 In this context, several techniques and strategies have been proposed to deal with fault diagnosis (FD) and fault-tolerant control (FTC) theories.6,7
Most current studies works have targeted the improvement of FTC for continuous-time systems. In Ladel et al., 8 a sturdy fault tolerant control (RFTC) design is proposed for continuous-time switched systems. The goal is to synthesize the couple (controller, observer) to stabilize the switched systems issue to actuator faults. A novel LMIs is proposed to decide the controller and observer gains in a single step. The instance given suggests that the acquired consequences are powerful withinside the presence of risky modes and simultaneous faults. Due to the speedy advances in computers, numerous works have focused on the improvement of the discrete-time model of the switched hybrid device. However, the discretization of the continuous switched system can harm the invariance properties. On the only hand, to make certain fault compensation for the discreet switched system, the observer approach has been utilized in current years. In Zhu et al., 9 an AFTC for discrete-time systems withinside the finite-frequency area is proposed. The observers are designed via way of means of thinking about the descriptor device approach to examine the stability in dynamic error systems primarily based totally on GKYP lemma. In Liao et al., 10 the problem of an observer primarily based totally on FTC for discrete-time switched systems issue to a combined switching scheme is addressed. A combined switching regulation is proposed to keep away from the chattering phenomenon of augmented error switched affine system, and a Lyapunov function is used to make certain system stability. Furthermore, those methods can be increase system complexity, in particular while fault and state estimators are concurrently used. On the other hand, the additive FTC is an effective technique to deal with fault compensation. The significance of the usage of the additive FTC arises via their inherent potential to react efficiently at some stage in a brief duration among the fault incidence and the overall performance restoration. 11
Thus, the main goal of this work is to design an additive FTC for a discreet-time switched system (Table 1). The principal benefits are as follows: miss assumption for the information of the parameter values to estimate the fault and no previous information approximately the dynamical evolution of the actuator fault. This makes the proposed estimate technique intrinsically strong to parameters values and easy to apply. Besides, a brand new LMIs is proposed the use of the Lyapunov characteristic to compute the control gains which lets in system stabilization and faults compensation. In Yang et al., 12 a hybrid data-driven FD strategy is proposed based on multi-sequence residual analysis and OC-SVM, which is applied to navigation sensors. In Sun et al., 13 a fault observer-based hierarchical integrated control algorithm is presented to process the actuator faults and coupling properties of vehicle chassis model. In survey papers, two kinds of FTC are mentioned14,15: passive approaches (PFTC) and active approaches (AFTC). PFTC uses the same controller for normal and faulty cases while the AFTC adjusts the controller’s structure to reconfigure the controller. AFTC requires fault identification as well as an updated control mechanism16,17. Generally speaking, fault identification are classified into two kinds: data-driven method and model-based method.18,19
Table of acronyms.
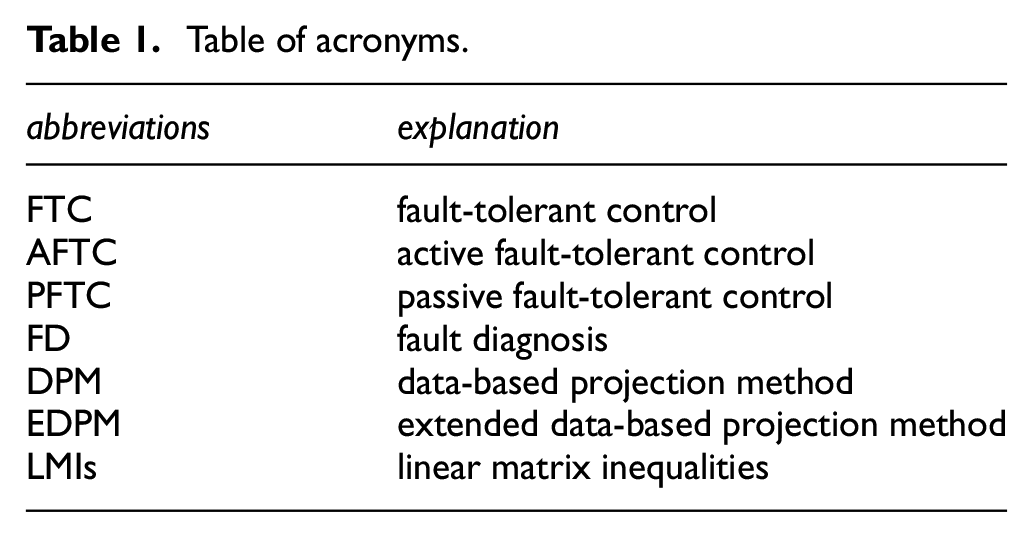
The former uses the available input-output data to have some behaviors properties such as neural networks and classification techniques and so on. However, the latter uses the model of the studied system to find the fault indicator, such as the observer based approach, parity space approach, parameter estimation techniques, and so on.20,21.
To the best of our knowledge, the overall performance reached via way of means of a PFTC can in no way be most reliable as compared with an AFTC for all design scenarios.
22
If we strive to synthesize a PFTC to deal with an immoderate variety of faults, the general conservatism will increase.
23
Indeed, the AFTC is greater efficient in treating distinctive kinds of faults.
24
Motivated through this situation, the novelties of this paintings is to design an AFTC of a discreet-time switched system that offers an amazing compromise among simplicity of the control system design and the closed-loop favored performances. In Noura et al.,
11
an additive FTC is evolved for a linear system. Indeed, its design is simple and appropriate for the purpose of our paintings as compared with others current approaches. The idea is to mix an additive control regulation to the nominal control. Thus, the first part of our proposed FTC regulation is designed to assure the stability by an most efficient computation of the control profits the usage of a set of novel LMIs generated through Lyapunov function. Then, the goal of the second one element is to compensate for the fault impact the usage of the additive control primarily based totally at the proposed fault estimation method and including it to the nominal one. In different words, the important thing function of this paintings may be recapitulated as follows: first, a brand new LMIs is evolved to compute the manage profits for flawlessly tracking overall performance. Switched system introduces partial models tailored to every modes “operating zone”. Thanks to the functions of switched hybrid systems, a bank of controllers related to every mode are designed to generate a set of control laws to account for the fault. Secondly, the estimation module includes residual “fault indicator” technology the usage of most effective the inputs-outputs data is advanced. The computation of the additive control begins involved primarily based totally on fault estimation module that’s capable of compensate for the fault impact at the system as soon as the fault is located. The proposed fault estimation approach is reached as quickly as feasible to keep away from large losses in system performances. Then, we show the effectiveness of the proposed FTC approach via a numerical instance and we evaluate its overall performance with present works (additive state feedback control) proposed in Yahia et al.25,26 Many papers dealt with the design of the additive FTC. In the literature, the control gains are obtained using different strategies such as, the pole placement, LQ optimization11,27, Lambert W method,
28
Lyapunov redesign principle
29
or assumed that the gain of the integral term is equal to one.
26
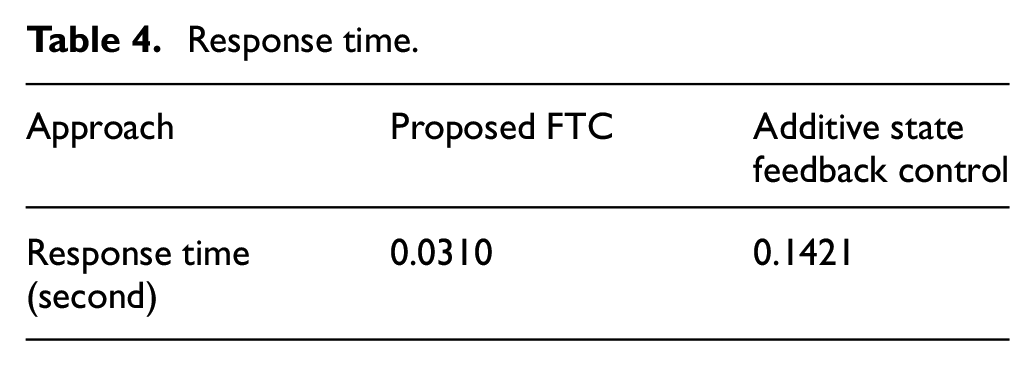
To the best of our knowledge, to tolerate for the fault effect these techniques require a significant response time and an important deviation of the control signal when of fault occurrence is notified. Motivated by this situation, this papers’ the main challenge consist in the design of an AFTC to compensate for the fault effect with a minimum reconfiguration time and ensure perfectly tracking performances. Besides, most of these works address the attitude tracking control issue and few results treated the stability of switched hybrid in the presence of faults. So, an important additional difficulties and challenge is the study of the stability of switched system subject to faults. An effective solution is to develop a novel LMIs using the Lyapunov function to elaborate the necessary conditions to improve the closed-loop performances in terms of trajectory tracking and fault compensation. The splendor of the proposed FTC structure arises via its inherent capacity to react correctly at some point of a brief duration among the fault incidence and the overall performance recovery. Then, computation of an additive control, based on the estimation fault to ensure fault compensation goals. Indeed, the fast fault estimation procedure is proposed using a data-based projection method presented in previous work by the authors for sensor fault estimation.
30
So, another challenge is to extend the procedure to deal with actuator fault. The proposed approach (EDPM) for actuator fault estimation has an additional constraint compared to the sensor fault estimation approach which is the input inversion analysis. The concept of an input inverse with delay
Problem statement
Consider the dynamic switched system with linear discrete-time modes described by:

where,
The following assumptions are performed:
Consider the switched system described by (1), this paper proposes a new AFTC based on the design of nominal control law, fault estimation, and modification of the control law to allow actuator fault compensation. Fault estimation approach is proposed using a data-based approach. A bank of controllers, corresponding to a set of modes to generate a set of switching control is built. Using the Lyapunov function, a novel adequate criterion is developed by means of linear matrix inequalities (LMIs). The obtained LMIs are then solved for obtaining the controller gain matrices to compensate for the fault effect.
Additive state feedback control
Given the system described by (1), in our previous works25,26 an additive state feedback control is proposed to treat the problem of fault-tolerant control for switched systems.

where,

Then,

In fact, the proposed additive state feedback control don’t always shows a satisfactory results for closed-loop performance in terms of trajectory tracking and fault tolerance. Therefore, it is necessary to modify the algorithm that takes into account the gain matrices
Proposed fault tolerant control
The proposed FTC law is composed of two parts: state feedback integral control and additive control laws performed using the fault estimation approach called the “data-based projection method”. First, we focused on the design of a nominal tracking controller. Thus, a state feedback integral control is proposed to allow trajectory tracking.
State feedback control with integral action
A state feedback control with integral action is developed to ensure the trajectory tracking. Consider the following state feedback control:

where,

where,
Hence, the feedback control law, which guarantees both stability and dynamic behavior of the closed-loop system, is modified as following:

where,


where,

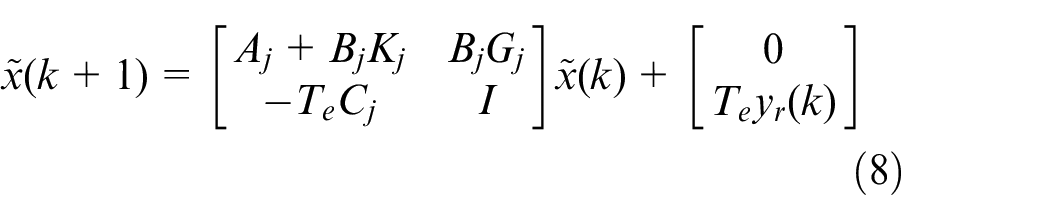
The equation (8) is equivalent to the following equation:

Or, when

where,
In order to find the optimal values of

where,

So,

Replacing (10) in (13):

Then, the following equation is obtained:

Or, the switched system is asymptotically stable, if

The inequality (16) is equivalent to:

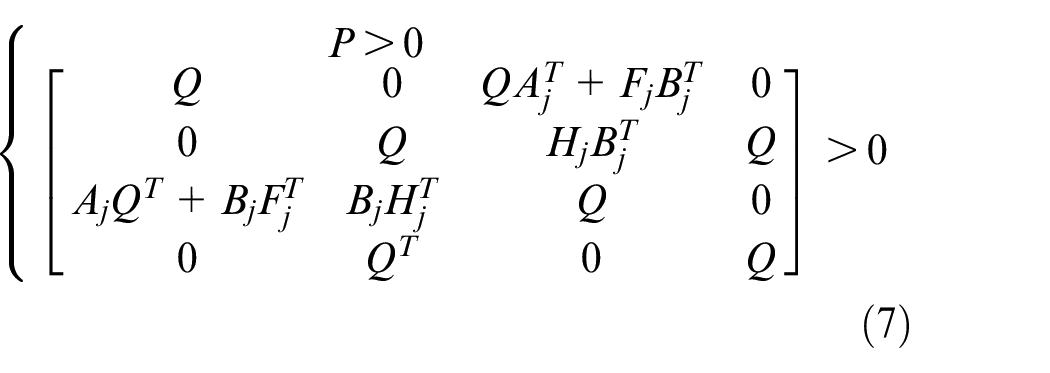
Using the Schur Complement, the following LMIs is obtained to find
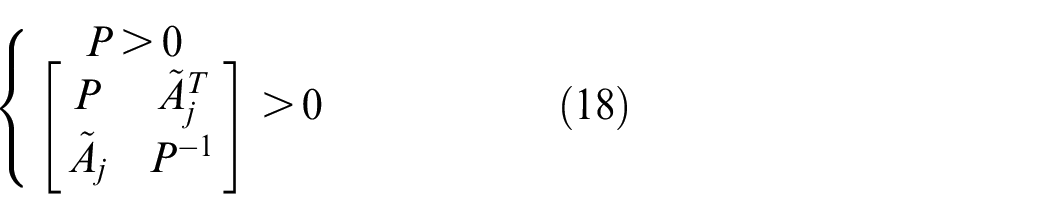
It can be seen from the inequality (18), there exist a nonlinear term which can not be solved using the “MATLAB” toolbox. In order to avoid this problem, we supposed to do the post multiplying and pre multiplying of (18) with the diagonal
Performing the post multiplying with the diagonal

Performing the pre multiplying of (19) with the diagonal
Using
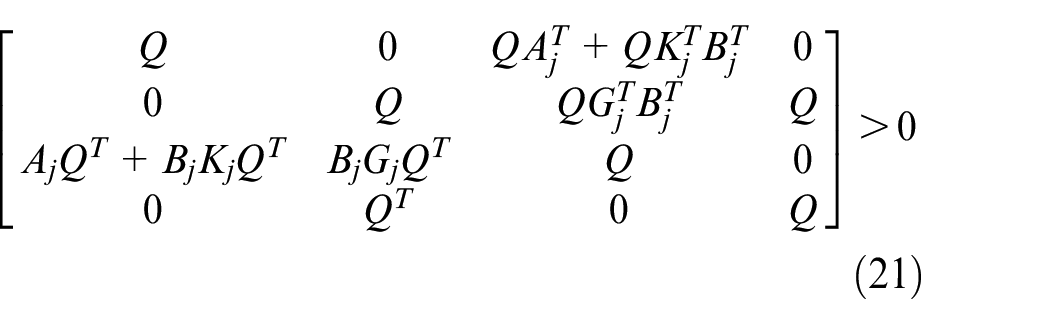
Supposing that there exist matrices
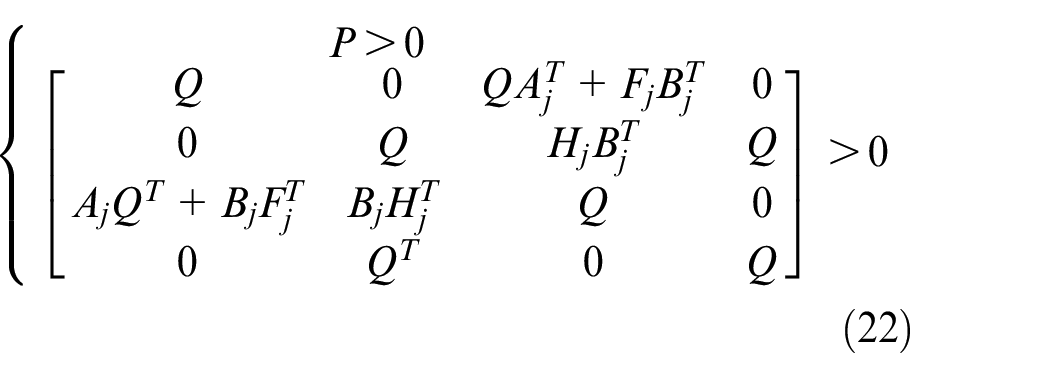
The obtained LMIs (22) allows to optimize simultaneous the values of the gain matrices
Additive control of actuator fault
In most industrial systems, controllers are synthesized, neglecting that faults can occur. The nominal control is up to date in accordance to the incidence of the fault. For this reason, it is considerable to take into account the reality that direct actuator fault lodging have to be considered to make sure the system stability. Therefore, whilst an actuator fault happens an additive control is introduced to the nominal one. Then, the novel partial control law is computed as following. 11

So, the closed loop state equation will be as follows:

In fact, in order to compensate the effect of the fault, the system should be as close as soon as possible to the (6). In other words, the additive control should verify the following equation:

Using the estimated fault (48) “theorem 5”, the additive control is then generated based on the EDPM:

where, the matrix
Extended data based projection method
In a previous work, the data-based projection method is used for sensor fault estimation. 30 This section extends this technique for actuator fault estimation. In fact, it has an additional constraint compared to the sensor fault estimation approach that is the inversion analysis. It uses only the inputs and outputs measured data. The main idea is to project an input matrix (generated using input data collected in a time interval T) on the orthogonal of an output matrix (collected using output measurements synthesized in the same time interval T). To detect and estimate the actuator fault, the following steps should be performed:
The state model (1) is converted to the switched model (27) firstly to consider the actuator fault as sensor fault in the system and then, to use the DPM approach developed for sensor fault estimation in Yahia et al. 30
The obtained model (27) is used to generate the databases from the inputs-outputs measured data.
The residual is computed using the databases already constructed to find the estimated fault.
Switched model of the input left inverse
In this part, we are interested in the switched model of the input left inverse. 32 So, the definition of input inversion is first given.

where,
The equation of the outputs in term of the control inputs are given by substituting the state into the system outputs (1):

Then, by repeating

where,


Supposed that
Then, using (29), the following expression is given:

The inverse can be constructed as follows:

By substituting (31) into the state expression of (1), we get:

Finally, the expressions (31) and (32) together form the state-space model of the input left inverse of system (1).

Inputs and outputs databases
The acquired state model of the input left inverse (33) is taken into consideration to synthesis the residual for actuator fault estimation. This allows us to address actuator fault estimation as sensor fault estimation. In fact, the technique is similar. However, the expression of the acquired residual is different. The expression of the control input database is given by:

The expression of the output database is given by:

where,

where,

Estimated actuator fault
The residual is the fault indicator used to find the estimated fault. It is obtained from the input-output databases (



Consider the obtained switched model of the input left inverse:

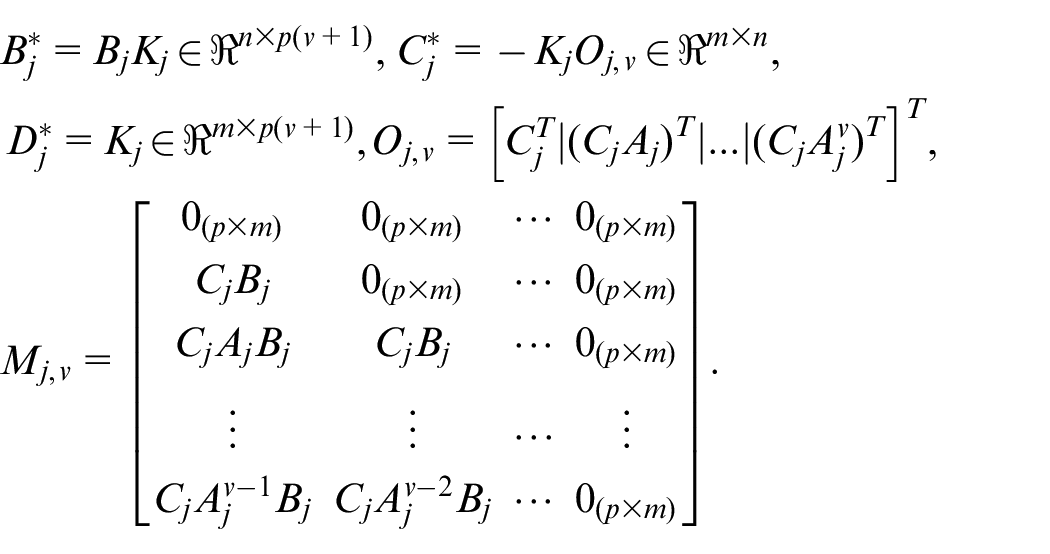
The system parameters are defined as follows:
By substituting the state equation (40), the following expression can be obtained:

where,

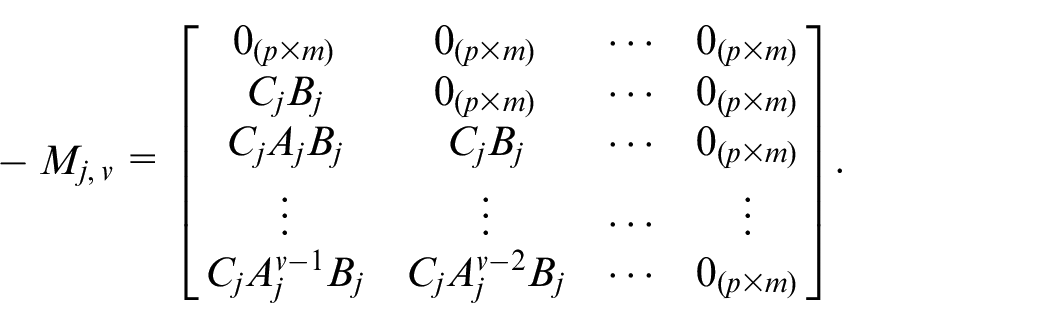
is the Markov parameters matrix of order

Under stability hypothesis of matrix

Consequently,

Concatenating equation (44) on a interval of size

where,
Let us define

Then, the computational form of


where,

where

Once the matrix
*No fault occurs:

Using condition (50), the residual evaluation form is zero
*Actuator fault occurs:

Using condition (50), the proposed residual becomes:

Replacing the expression of (49) in (53), then the residual is given by:
From equation (54) and using a selective vector

Comparative study
In this part, we illustrate the effectiveness of the proposed FTC with an example and we compare its performance with the additive state feedback control proposed25,26,30 (see section 3). It will be shown that, the proposed FTC control performance is better than the additive state feedback control. Let us consider a switched system including two partial models:
Partial model 1:

Partial model 2:

Then, the system is defined by two inputs
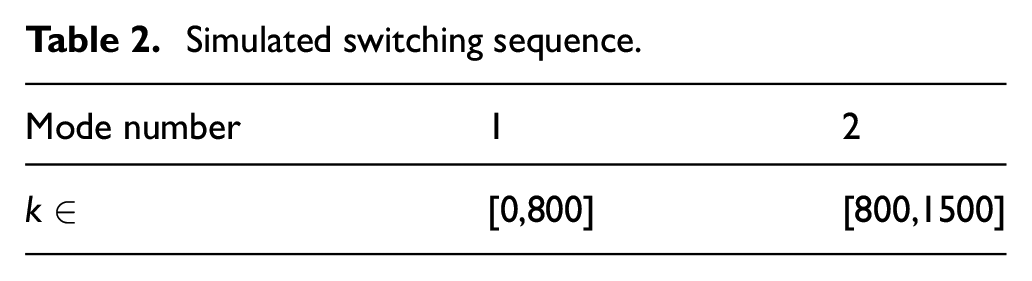
Simulated switching sequence.
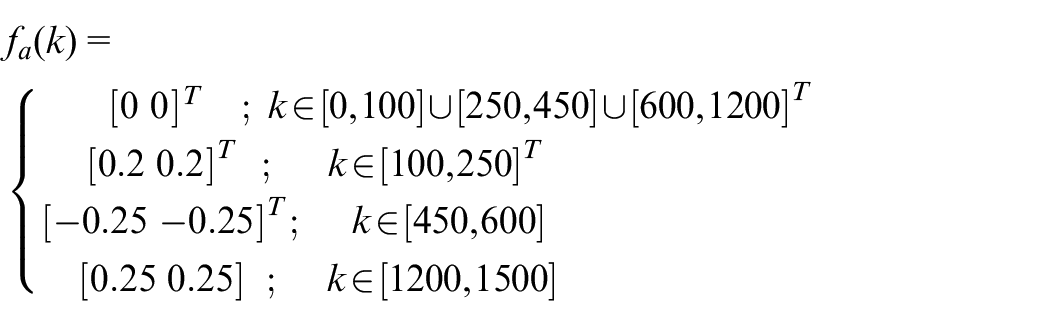
Actuators faults may be evoked with the aid of using numerous extraordinary styles of problems, are associated with incorrect readings because of a failure of their additives which reasons the lack of effectiveness. In fact, they’re taken into consideration additive indicators at the measurements.
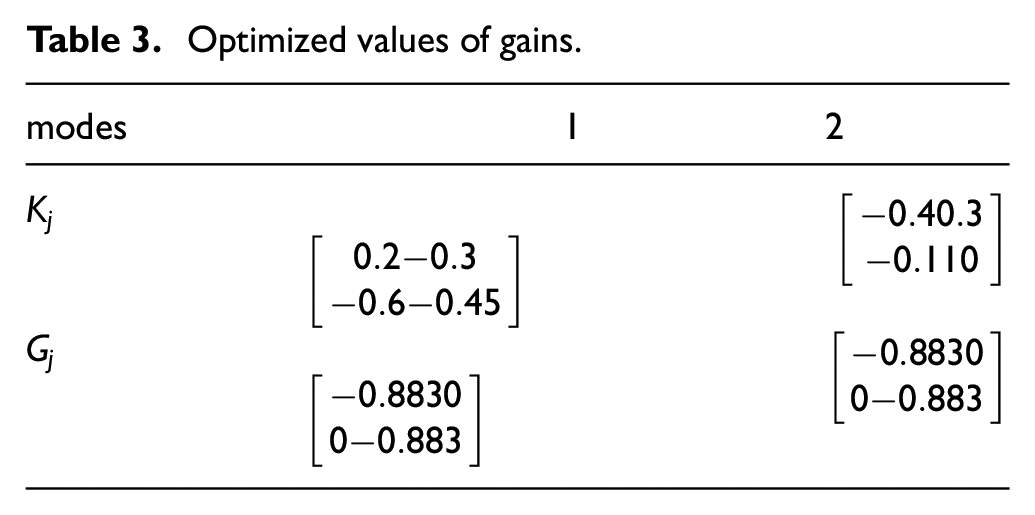
Using theorem 2 (novel LMIs developed),
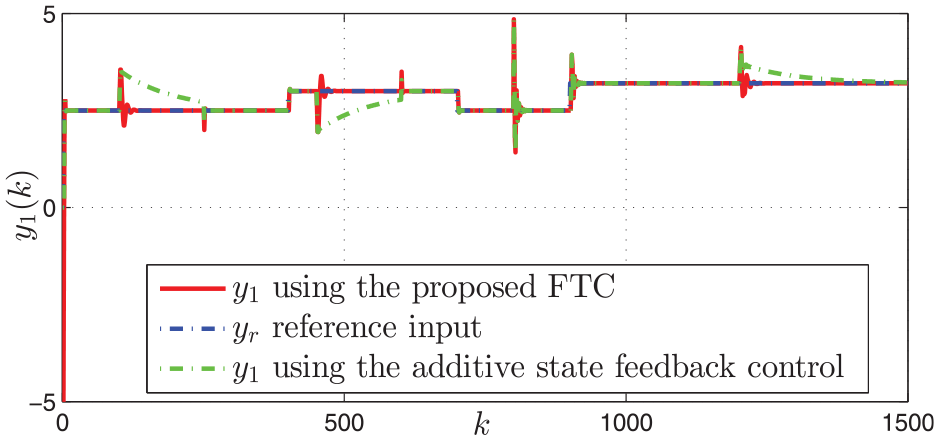
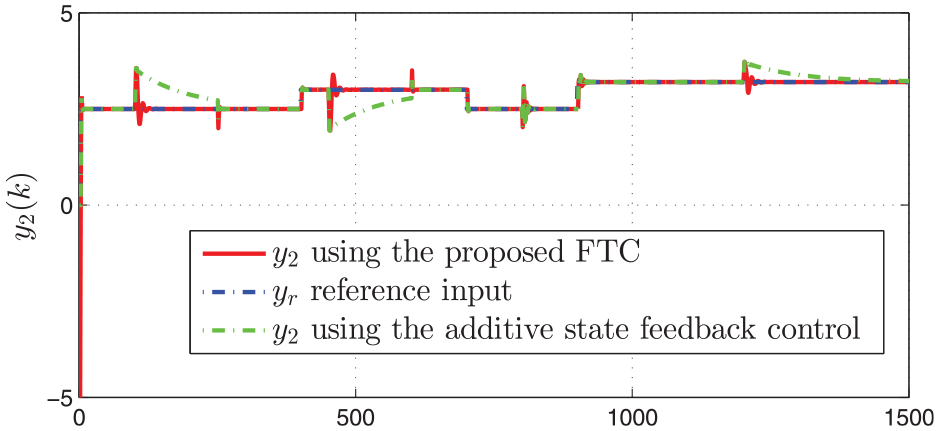
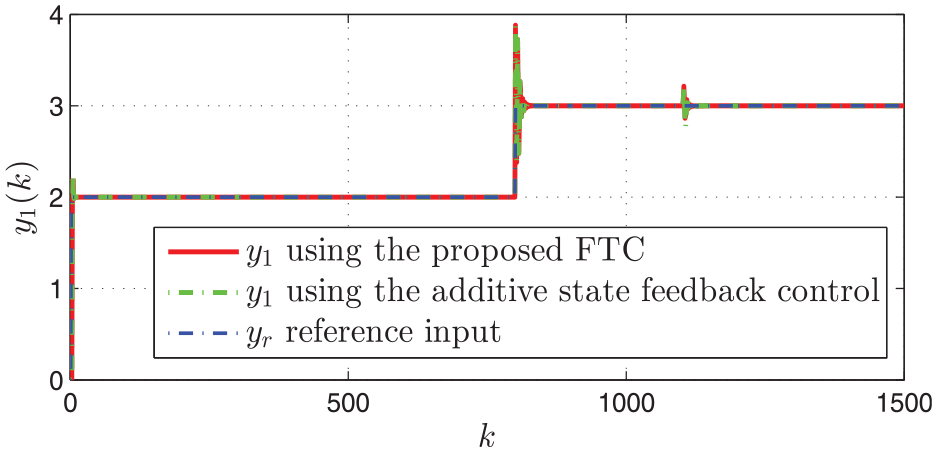
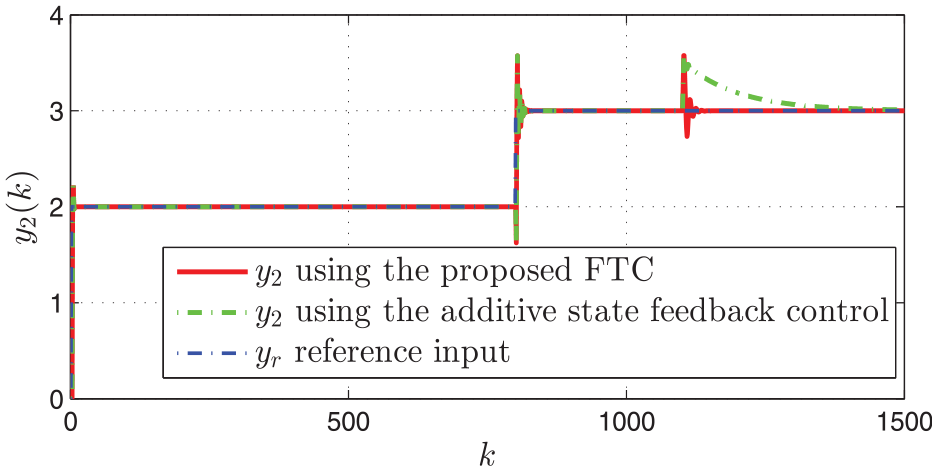
The evolution of the outputs using the additive state feedback control and the FTC proposed in this paper are compared in Figures 1 and 2. The additive actuator fault appears at

Evolution of the first output.
Evolution of the second output.
Optimized values of gains.
Response time.
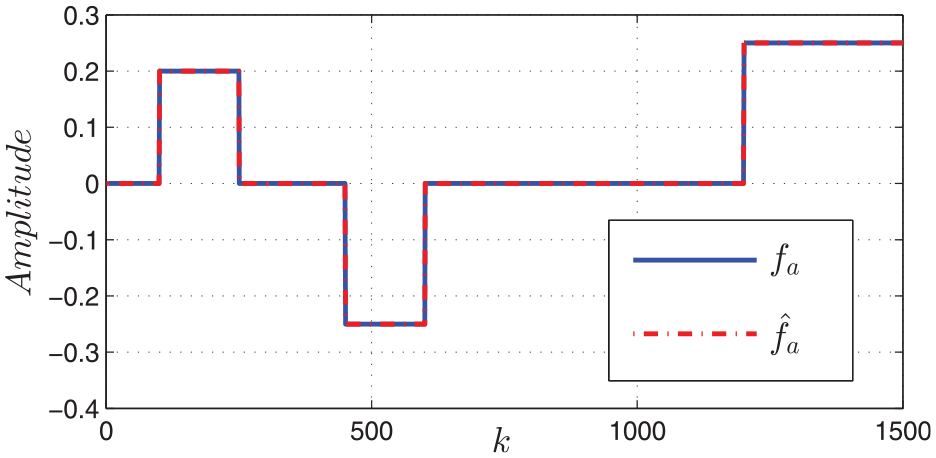
Actuator fault estimation.
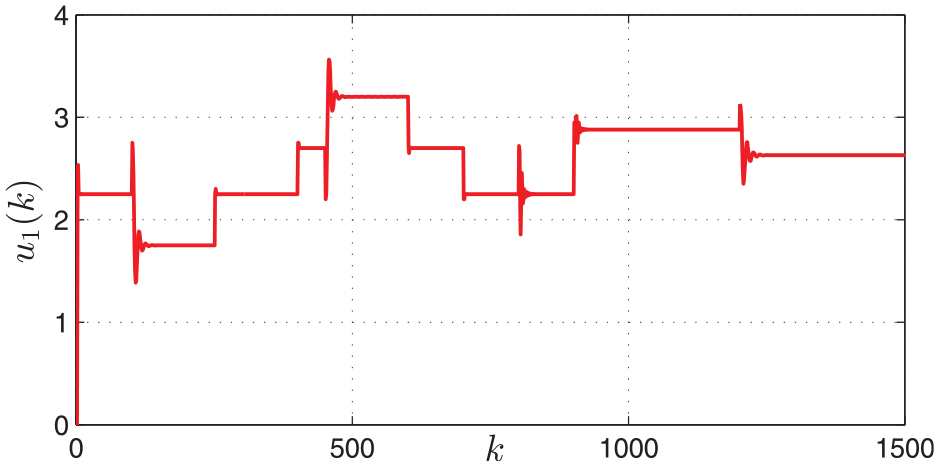
Evolution of the first control using the proposed FTC.
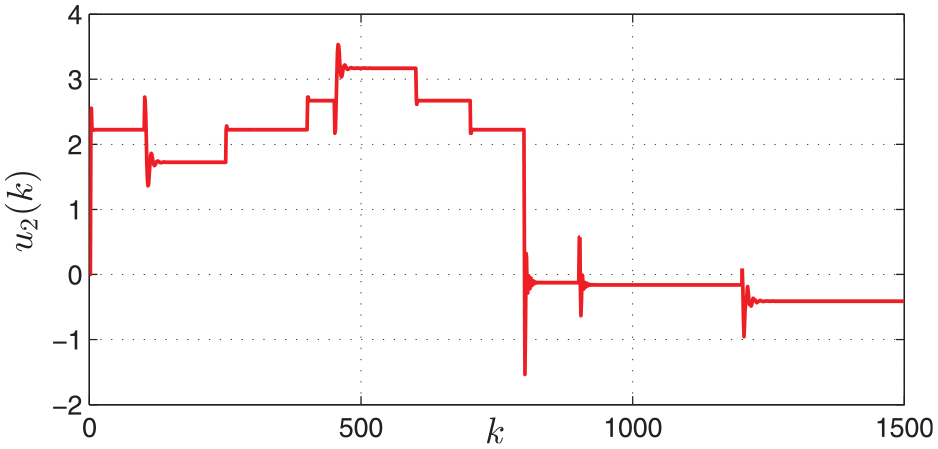
Evolution of the second control using the proposed FTC.
This means that the switched system is working in nominal non faulty conditions until
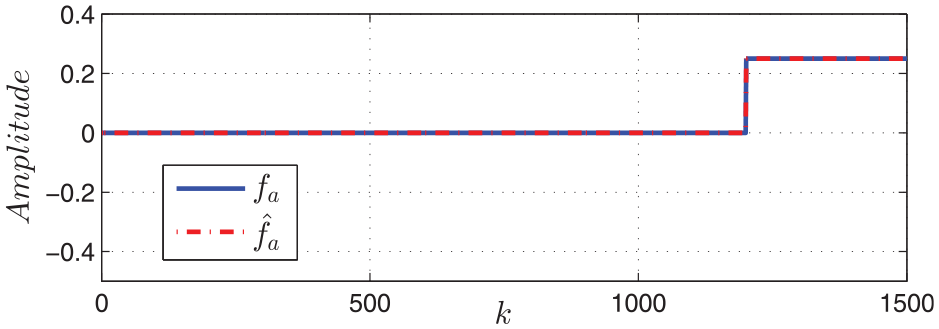
Actuator fault estimation.
Evolution of the first output.
Evolution of the second output.
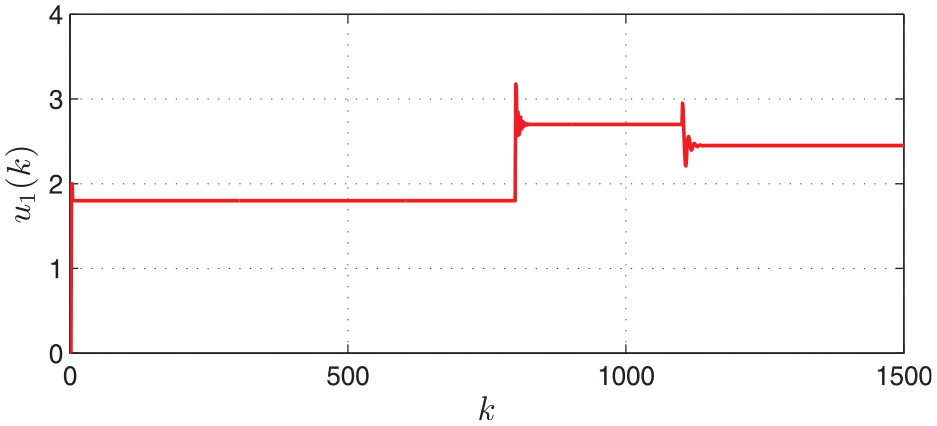
Evolution of the first control using the proposed FTC.
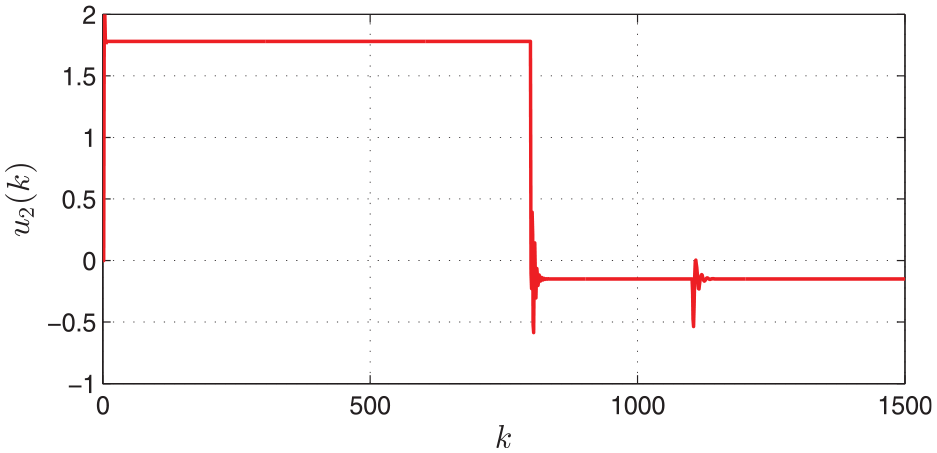
Evolution of the second control using the proposed FTC.
To evaluate the accuracy of the proposed FTC, the following different performances criteria are used. The first performance index is the mean square error (MSE) and it has the following expression:

The second is the variance accounted for (VAF) criterion and it has the following expression:

Where
Conclusion
This paper investigates the problem of actuator fault estimation and compensation of switched hybrid system. A data-projection method is extended (EDPM) for actuator fault estimation. The fault estimation size and time profile are close to the real one. Fault compensation is performed based on the FTC. The proposed FTC is designed by adding of the state feedback control with integral action to an additive control that is evoked using the EDPM. In fact, a novel LMIs is developed to optimize the values of the gain matrices of the state feedback control with integral action. This allows to keep the stability and compensate for the fault effect with a minimum reconfiguration time. Besides, industrial systems are generally complex and issue now no longer simplest to faults however additionally to external disturbances (ramp, harmonic, white/gaussian noise signals) that may degrade the system performances. However, with inside the presence of disturbances, the proposed FTC can not make certain disturbance attenuation which can result in the instability. Therefore, it’s far essential to adjust the proposed FTC algorithm, considering the presence of disturbance to enhance the closed-loop overall performance in phrases of trajectory tracking and disturbance attenuating.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the ministry of Higher Education and Scientific Research in Tunisia.