In this paper, an event-triggered mechanism for a class of multi-thread control systems is designed by the relationship between the threshold line and the Lyapunov function and an algorithm is proposed with update delays considered. In order to solve the problem of resource waste in complex systems with mismatched characteristics of the number of controllers and controlled plants, a stable multi-thread control algorithm considering the delay is designed by adopting the event-triggered mechanism. In the algorithm, the concept of a novel multi-thread control system is utilized to eliminate the need for a complex description of this class of systems. By reducing the constraints on the Lyapunov function in the traditional switching control scheme, a novel event-triggered rule is designed to save resources and ensure that the system is asymptotically stable. Furthermore, it is proved that the proposed multi-thread control algorithm based on event-triggered mechanism is feasible when the system has a non-zero update delay. Finally, the system is guaranteed to avoid the Zeno phenomenon and the proposed algorithm is investigated by simulation.
In recent years, more and more complicated, variable, and diverse problems have been emerging in the modern industrial process. The control system usually contains multiple subsystems. Specifically, those involve the interaction of continuous and discrete subsystems are called hybrid systems.1,2 To control a class of hybrid systems, a traditional method is to control a group of controllers with an equal number of subsystems to work alternately by switching signals.3,4 The system with such an alternate working mechanism is also called the switching system. It was first introduced into control theory in the 1960s and has been widely used in traffic control, intelligent robots, and several other fields.5–7
Switching rules play a crucial role in switching systems. Different switching rules cause different action sequences for the subsystems, resulting in different dynamic characteristics of the system. A switching system was designed with the Tagaki–Sugeno (T–S) fuzzy model to describe the switching law between different modes through a random Markov chain.8 Some controller gains were designed to ensure the stability of the system. Also a switching law based on a finite-time command filter applied in switched nonlinear systems was proposed.9 It effectively relaxed the constraints on the stability of the system. Switching laws were derived for the subsystems of nonlinear systems with time delays and uncertainties in finite time intervals to solve the design problem of asynchronous elastic controllers.10 Clearly, there is a one-to-one correspondence between controllers and controlled plants in a conventional switching system. In real-world situations, however, the numbers of controllers and controlled plants in the system are often different, for example, Da Vinci surgical systems, wind turbine control systems, and building lighting systems.
In traditional control schemes for such mismatched systems, the controller triggers an action at every sampling moment, which is unnecessary and a waste of the limited computing and communication resources of the system.11–13 To solve this unnecessary triggering problem, the event-triggered mechanism was proposed, and it has been widely investigated and applied.14–16 The event-triggered mechanism means that the controller takes action when the error value exceeds the threshold range of the state value function. This reduces the number of actions compared to periodic triggering. A distributed event-triggered estimation method applied in monitoring systems was utilized to reduce the consumption of sensor power and network bandwidth.17 And a novel event-triggered strategy was proposed based on the Lyapunov function method and adaptive neural control method.18 In this strategy, different thresholds were used to guarantee the stability of the system. A switching function consisting of a time-delay system and an event-triggered mechanism was constructed and the corresponding event-triggered synovial control law was proposed.19 Input-based event-triggered rules are applied to a robust adaptive neural cooperative control algorithm, which allows the controller-to-actuator transmission resources to be reduced and has a positive effect on the robustness of the closed-loop system.20,21 In addition, the event-triggered mechanism is applied in uncertain nonlinear MASs, high-order nonlinear multi-agent systems, and so on.22–24 However, the event-triggered mechanism is only used in systems with an equal number of controllers and controlled plants. Its feasibility in mismatched control systems remains to be investigated.
For existing theories, there still exist some obvious limitations: Existing studies on systems with multiple controlled plants usually have the same number of controllers and controlled plants. However, with the rapid development of intelligent systems, a large number of controlled plants share one or a small number of controllers. This results in that multiple plants cannot receive control signals at the same time, which affects the reliability, security, and maintainability of the algorithm. When applying multi-thread control algorithm, controller switching will cause the decline of system control performance, so it is necessary to achieve stable and precise control through appropriate algorithm. The event-triggered mechanism provides a reasonable and feasible switching logic, but it has not been applied in systems with the mismatched characteristics. In the study of event-triggered mechanisms for systems with multiple controlled plants, the selection of triggered conditions is crucial, which will directly determine the ability to save resources. In addition, since the update of the control law takes time, delay becomes an indispensable keyword when studying the control scheme. Finally, in this class of systems with mismatched characteristics, how to avoid Zeno phenomenon becomes a new challenge.
In this paper, by constraining the Lyapunov function below the threshold line, an event-triggered mechanism is designed to control a class of systems containing a greater number of controlled plants than controllers. First, inspired by the multi-threading concept in the computer field, we propose a multi-thread control system to describe the above-mentioned mismatched system. Second, we design a multi-thread controller based on the event-triggered mechanism so that the triggered moment of the switching law is determined by the intersection of the threshold line and the Lyapunov function. Then, the stability of the multi-thread control system when the proposed event-triggered mechanism is applied is demonstrated, and its switching law with non-zero update delays is given. Finally, it is guaranteed that the system will not generate accumulation points during the sampling period, that is, no Zeno phenomenon will occur.
The rest of the paper is organized as follows. In Section II, the concept of multi-thread control is proposed and a multi-thread control system is modeled. In Section III, a multi-thread controller based on an event-triggered mechanism is designed and the system’s stability under the given switching law is guaranteed. Section IV provides the switching law of the system with non-zero delays based on the event-triggered mechanism. Section V presents the simulation verification results. Finally, the concluding remarks are presented in Section VI.
Preliminaries
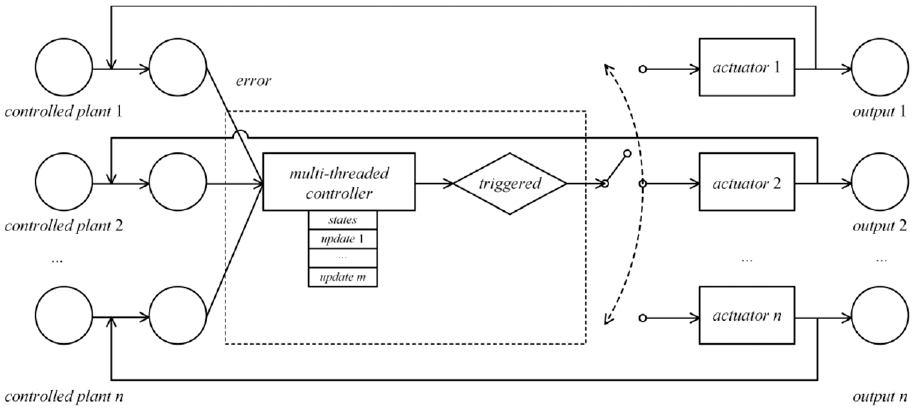
In this section, we introduce a class of nonlinear systems containing a greater number of controlled plants than controllers. Assuming that the system contains controlled plants and controllers, there are in the entire control process. Inspired by the multi-threading concept in the computer field, we define this type of system as a multi-thread control system. This system is intuitively shown in Figure 1.
Structure diagram of multi-thread control system.
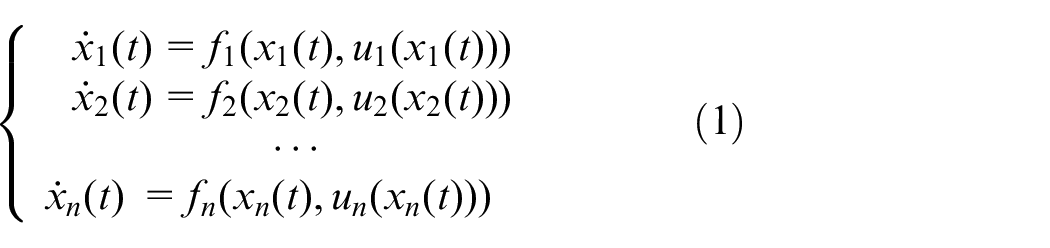
Assuming that there is no coupling between the controlled plants, the state equation of the multi-thread nonlinear system can be written as follows:
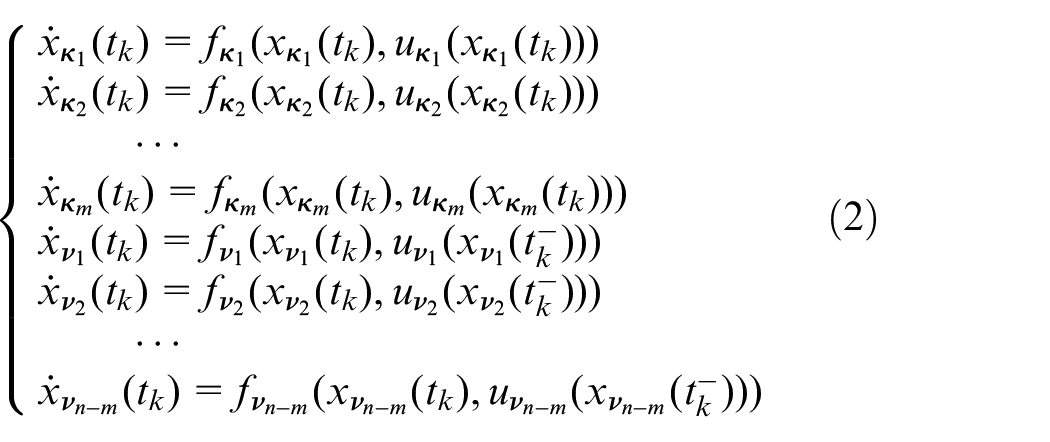
The time series represents the triggered times of the controllers in the multi-thread control system. Assuming that at moment , the th controlled plants are triggered to update the control and the remaining th controlled plants are not triggered, the state equation can be replaced as follows:
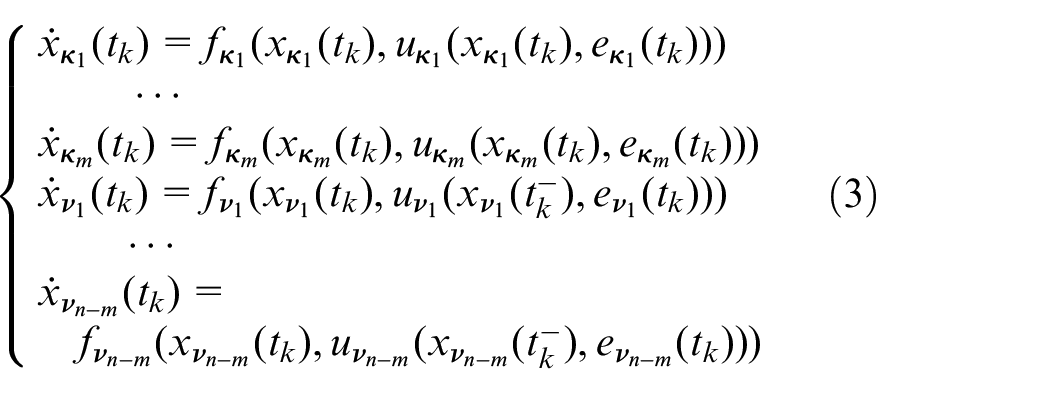
where represents that at moment , controllers are not updated and remain the same as in the previous structure. Define the errors as the difference between the state value of the controlled plants at moment and the state value at the moment when they were last triggered. The closed-loop state equation of the multi-thread control system is obtained as follows:
The property of the input to state stability (ISS) is used to deduce the triggered conditions of the switching moment of the multi-thread control system. Let be the set of triggered controlled plants at moments , where is the sequence of .
Assumption 1. Let be the Euclidean distance of and the states of the controlled plants . is the sequence of the event-triggered plants at moment , and represents the sum of all the Lyapunov functions for the controlled plants at moment . That means . , and are Lipschitz continuous. Then the state of each subsystem satisfies
and the Lyapunov functions of the multi-thread control system satisfy
Remark 1.Referring to the theory of mathematical analysis, using the continuity of the two functions and derivatives, Assumption 1 can be proved.25
Condition for event-triggered mechanism
In this section, we design some triggered conditions for the multi-thread control system without non-zero delays, and guarantee the stability of the system under the designed switching law.
We establish a piecewise continuous function to prove the asymptotic continuity of the system, and guarantee that satisfies the following conditions when :
To support the correctness of the proposed triggered condition and verify that the triggered period takes a constant as the minimum lower bound, the following lemma is given:
Lemma 1.Suppose there are two class functions and , where is the minimum positive solution of :
If , and satisfies , then .
If and satisfies , then.
If and , then for all.
If , then for all .
To facilitate the subsequent derivation, we mark and . When the system satisfies the above assumption 1, for , the controllers at update time violate
where and the asymptotically stable system has a normal number , so that the triggered period satisfies .
Proof. First, we prove that the sampling period has a lower bound of normal numbers. The deviation is expressed in the following form:, where represent the state values of the controlled plants at the last triggered time before time .
Assume that there is no coupling between the updated control law at moment and the non-updated control law. Then solve the differential equation to get
where indicates the triggered period.
Combining the inequalities equations (5) and (6) at moment yields
where . represents the sum of the Lyapunov functions of all controlled plants at moment , and within period the sequence of the triggered plants is .
Define , and the event-triggered condition can be written as follows:
Clearly, the inequality can be simplified as follows:
Suppose and bring it into and to get
According to Lemma 1, it is proved that the triggered period has a minimum positive lower bound
where is the smallest positive solution of the equation .
Remark 2.We consider that in the studied systems with mismatched characteristics of the number of controllers and controlled plants, when using the proposed switching logic, the Lyapunov function of the system does not decrease monotonically as the continuous systems. Since the piecewise Lyapunov function in the switching system can still guarantee asymptotic stability when it is monotonically decreasing in the interval, we use this feature to relax the constraints on the Lyapunov function, so that the time interval between events becomes longer.
The above restriction on the triggered period shows that for , the multi-thread control system has no accumulation points under the control based on the proposed event-triggered condition. In other words, the system avoids the Zeno phenomenon. Then we prove the stability of the multi-thread control system based on the event-triggered rule. Referring to equation (8), set the function related to the event-triggered condition as follows:
where and . From triggered condition equation (10), it can be seen that within period the Lyapunov function of the multi-thread system is always below function
By definition, the derivative of function gives
Using the relationship between the states and the Lyapunov function shown in inequality equation (6), we get
Since the states of controlled plants are not equal to zero at the same time, it can be known that and the function is decreasing monotonically for .
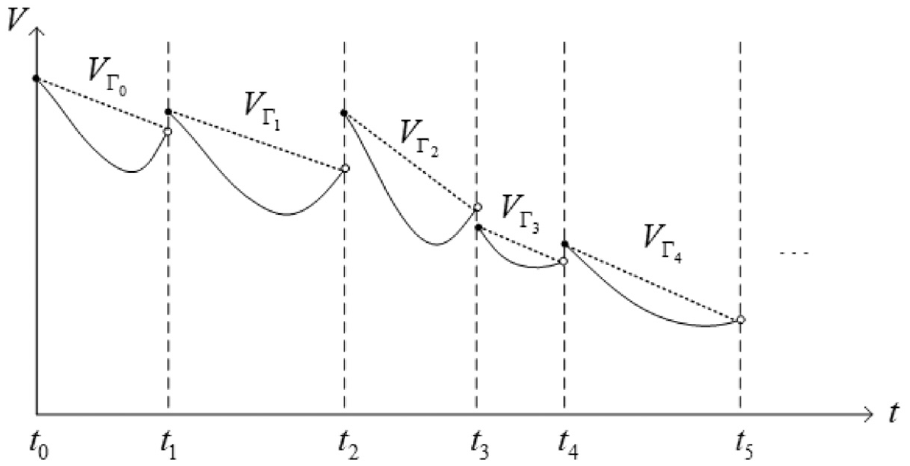
Remark 3.The above analysis of function verifies that the proposed threshold line is decreasing monotonically in the period . In other words, the Lyapunov function satisfies . This is clearly illustrated in Figure 2.
Lyapunov functions in each triggered period.
We give two theorems to verify the stability of the whole system. Before giving the theorems, we define the sum set for the state sequence of the controlled plants as . The initial state sequence of the multi-thread system is . When the controlled plants are triggered, there is a switching sequence .
Theorem 1.It is assumed that at moment , the th controlled plants in the multi-thread control system are triggered, and the th ones are not; at moment , the th controlled plants are triggered, and the ones are not. Each controlled plant in the multi-thread control system has a Lyapunov function and when . Then the multi-thread control system is globally asymptotically stable if the state trajectory of the system satisfies the following condition:
where is the sequence of the event-triggered plants at moment, and represents the sum of all the Lyapunov functions for the controlled plants of the multi-thread control system.
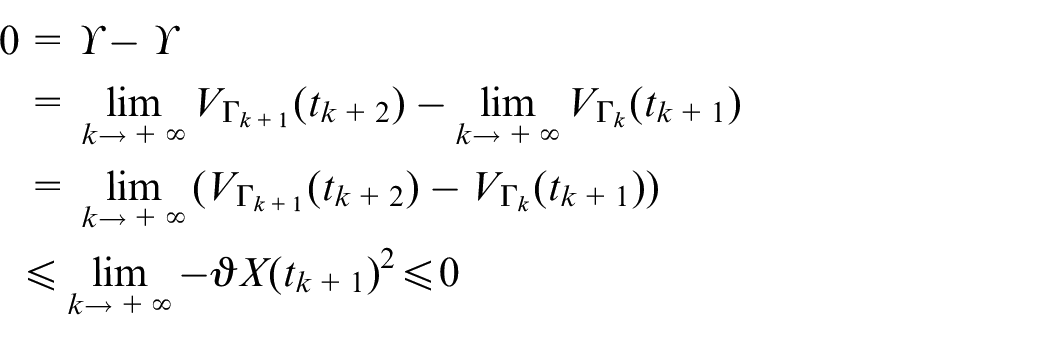
Proof. Since for , then
and this limit guarantees that the sequence is strictly decreasing and has a lower bound. Using the properties of the limit, it can be solved as follows:
The above formula shows that the sum of the states of the controlled plants tends to when the time tends to infinity, which means
where .
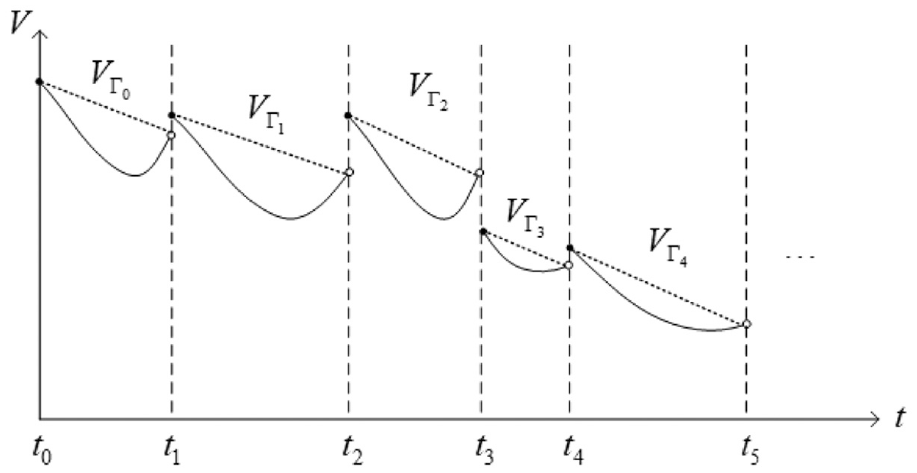
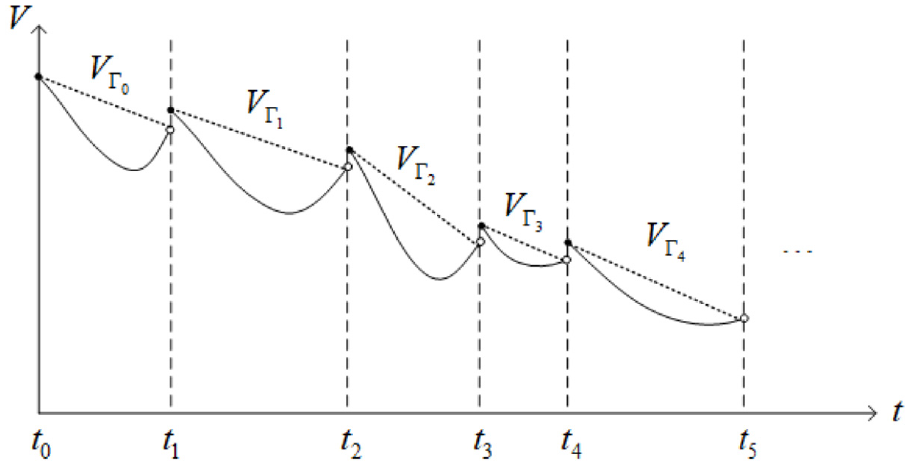
Remark 4.Theorem 1 gives a restriction , as shown in Figure 3, on the multi-thread control system. The restriction guarantees that the value of the Lyapunov function of the system when the next switchover is about to take place within period is always smaller than that within period .
The Lyapunov functions of the system with strictly decreasing sequences
Even if each controlled plant has a Lyapunov function, we need to restrict the value of the switching moment to ensure the stability of the multi-thread control system with the event-triggered control mechanism.
Theorem 2.The system is Lyapunov stable if there exists a Lyapunov function for each controlled plant and the trajectory of the sequence of switches as well as the corresponding state satisfy
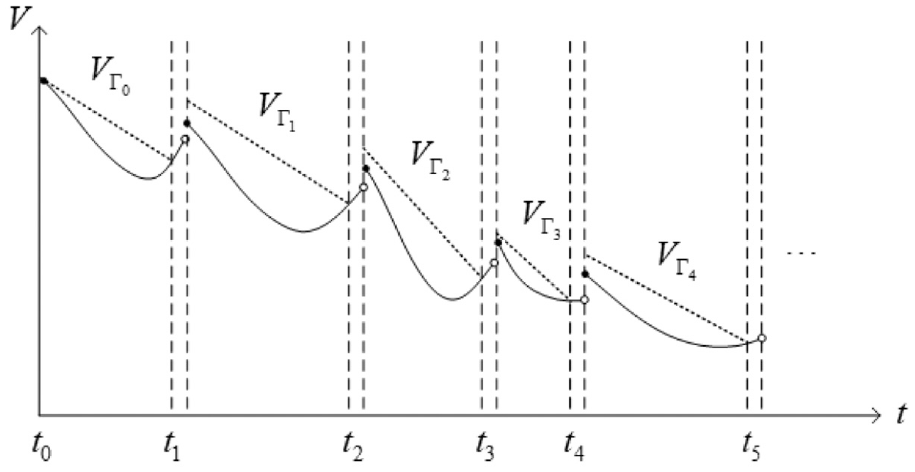
Remark 5.Theorem 2 is a stronger stability condition, defining that the Lyapunov value decreases at both the beginning and end of each switch of the system. From Figure 4, it can be clearly seen that .
The stability of the multi-thread control system with the condition of decrement.
Update delays in the system
Since the actions of the actuators in the multi-thread control system take time after the controllers are triggered, a non-zero delay will be generated so that the actual triggered times are . In this section, we still use the triggered condition , that is, the upper bound of within period as the starting point for a threshold line. Under this condition, the controllers are triggered at moment when intersects with the threshold line, as shown in the following Figure 5.
Theorem 3.If Assumption 1 holds for the proposed multi-thread control system, the Lyapunov function satisfies , and the delay is expressed as , where are the solutions of these two equations, respectively,
then for , , and are established.
The moment when the controllers are triggered and the moment of non-zero delays.
Proof. Let be the sum of the errors of the multi-thread control system after the th triggered action at moment (). Based on equation (11), we obtain the following:
Solving the above differential equation, the inequality is obtained as follows:
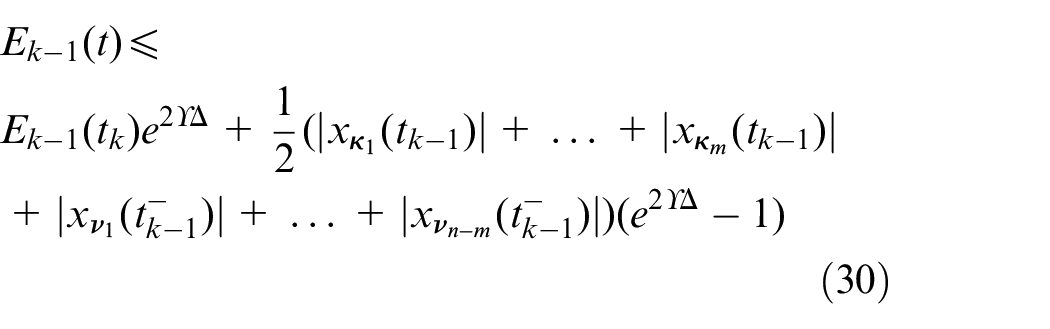
where . Based on equation (7), we obtain the inequality at moment . Based on equation (30), we obtain the following:
Solving the differential inequality, the maximum value of is restricted to
where
Through computational analysis, we obtain the following:
Let and . At moment , . When and with Lemma 1 considered, the following inequality can be obtained:
so is proved.
Now we consider equation (30) and Assumption 1 to obtain another restriction for the Lyapunov function of the multi-thread control system.
The solution to the differential inequality is
where
It is clear that satisfies the following condition:
Let and . Similarly, based on Lemma 1, is obtained.
Theorem 3 shows that the Lyapunov function of the multi-thread control system is always lower than the line whose starting point is and the slope is .
Theorem 4.If the Lyapunov function of the multi-thread control system satisfies and , where is the minimum positive solution of the following equation:
then . satisfys
and is the solution of , where and .
Proof. We know the derivative of at moment
Solve the differential equation and bring in the initial condition when , we get
where . Similarly, when , satisfies the following inequality:
Solving the differential equation and bringing in the initial condition in equation (33) yields
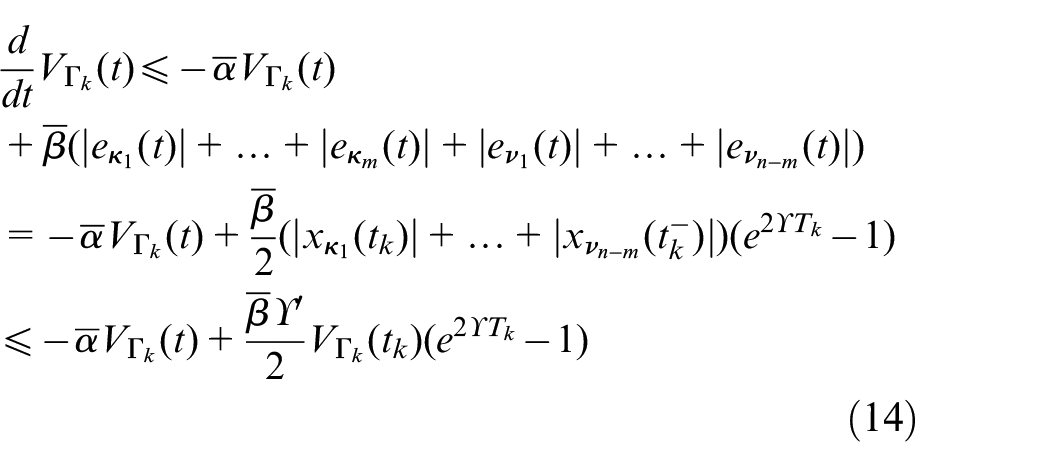
where and . Based on equation (7), we bring the upper limit of the error into the Lyapunov function of the multi-thread control system to obtain the following inequality:
Since , the error is limited by and . By analysis, equation (34) can be replaced as follows:
where . Let , and bring it into the above equation, then we get
Solving the differential equation and defining , we obtain
Based on Theorem 3, the multi-thread control system satisfies . The threshold line as a function of .
Now assuming and . Because of the phenomenon that , holds if is the minimum positive solution of . Using lemma 1, and are obtained.
Remark 6.The controlled plants triggered in the multi-thread control system at moments and are different, so we use and to distinguish them, the same for
Theorem 5.The proposed multi-thread control system is asymptotically stable, if the initial conditions satisfy and , where is the minimum positive solution of the following equation:
The condition is violated at the event-triggered moment , where .
Proof. If , then based on Theorem 3, we get . Theorem 4 verifies and . Let and . Clearly, is established, and at time . Therefore, when , based on Lemma 1, is analyzed. There is a positive constant such that holds.
To facilitate the subsequent proof, we construct a piecewise function as follows:
From the event-triggered condition, can be obtained when . Based on Theorem 3, when , and by that analogy, holds over the entire domain .
To prove the stability of a multi-thread control system with non-zero delays,
is proved as follows. The next triggered moment violates , so let . Based on in Theorem 4, the Lyapunov function satisfies . Based on , is obtained. At this point, the above restriction is proved. Therefore, by analogy to the case when the multi-thread control system has no delays, the system is proved to be asymptotically stable when it has delays.
Simulation and experiments
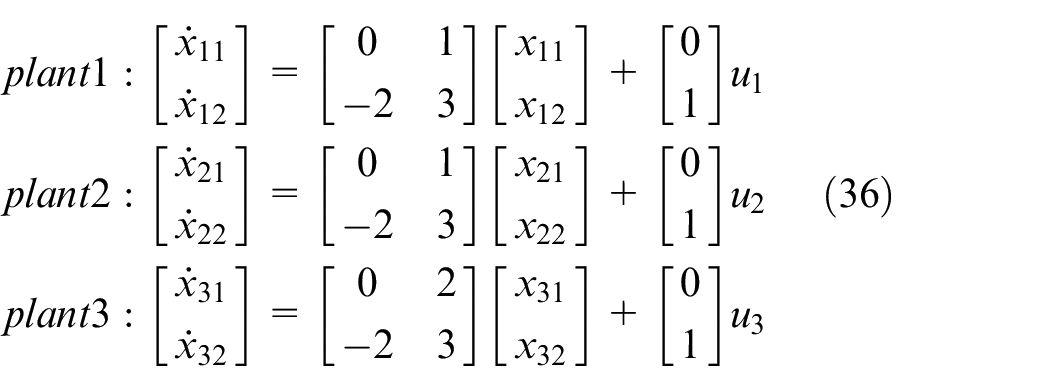
We now consider the three plants of the system described in Section II. For the convenience of simulation for the proposed algorithm, we select the following linear control systems:
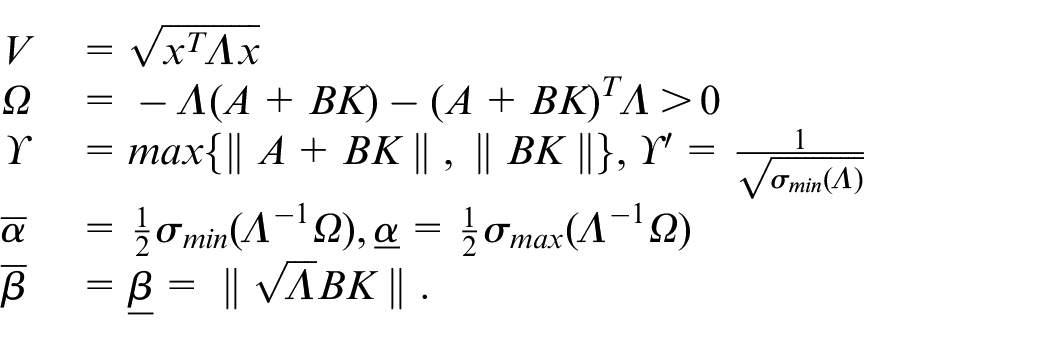
stabilized by the linear feedback coefficient . The values of the selected parameters for the multi-thread control system refer to the following formulas:
Here it is assumed that and , then , , , , and can be obtained by the above formulas.
We analyze the states of the multi-thread control system, the event-triggered controller signals, the triggered frequency of each plant, and the relationship between the Lyapunov function and the threshold line when the update delay is not considered. Applied to some existing technologies,26 the results are shown as Figures 6 to 9.
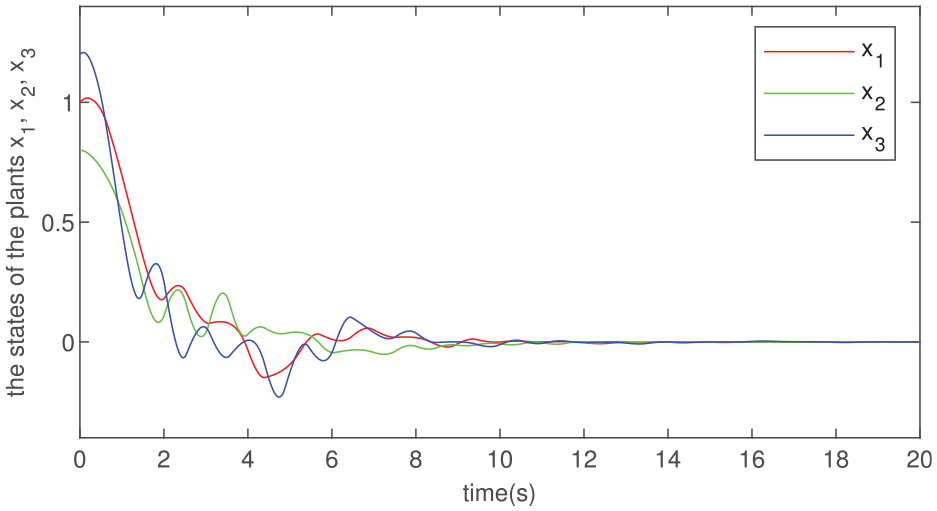
The states x1, x2, and x1 of plants in the system.
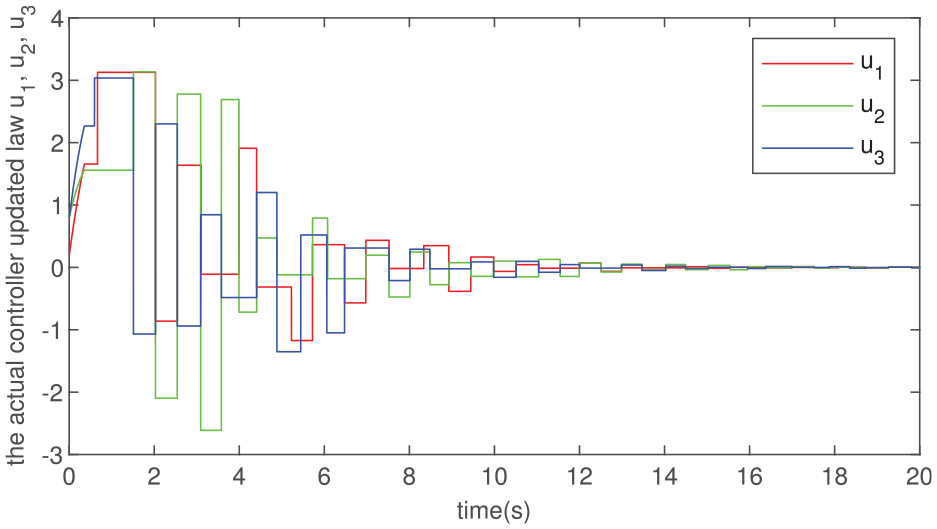
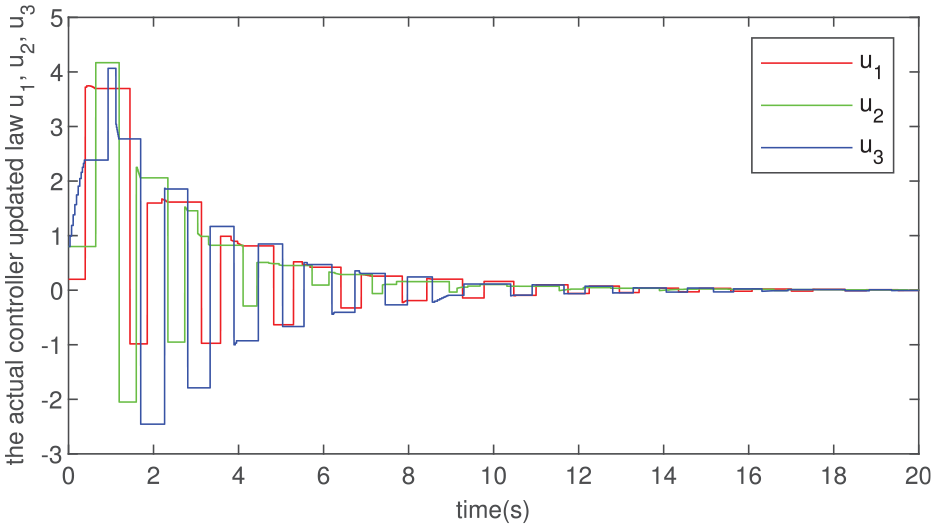
The inputs u1, u2, and u1 of plants in the system.
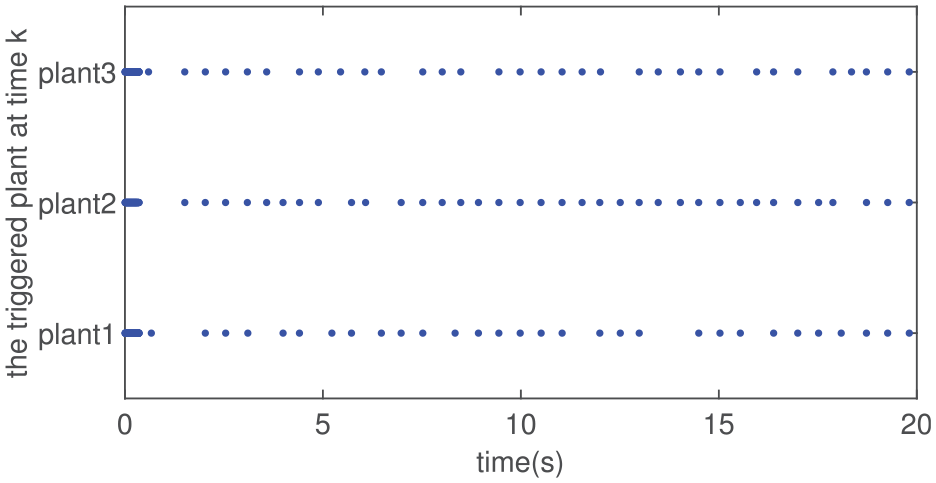
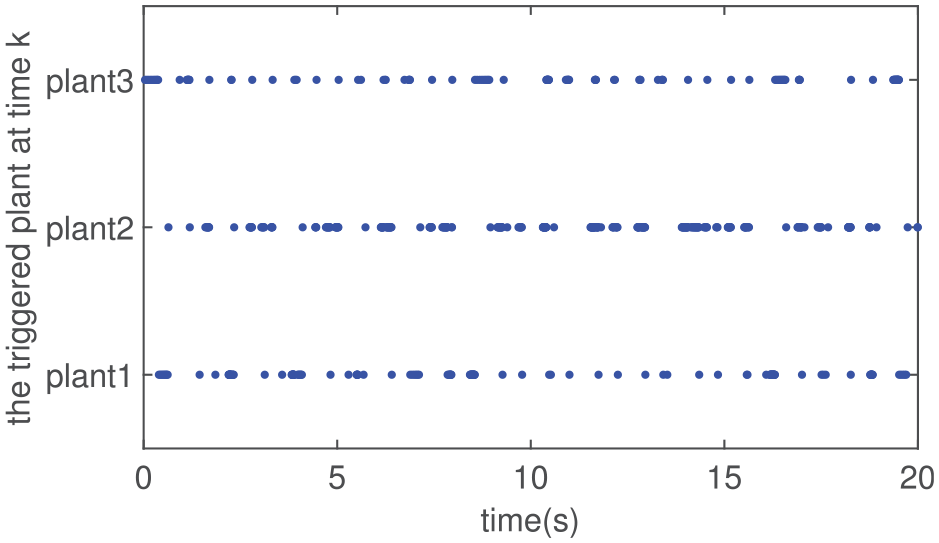
The plants triggered in the system at time .
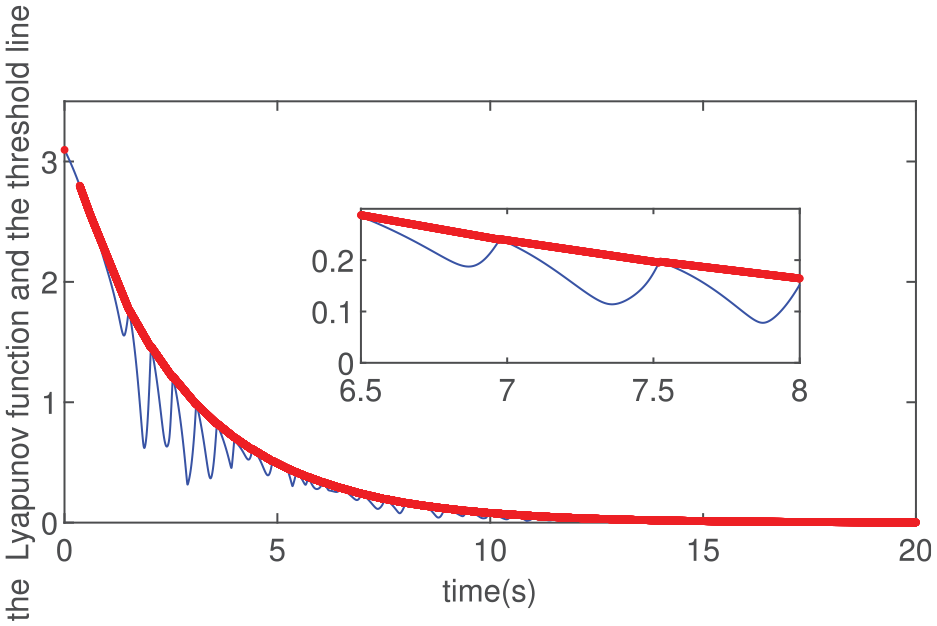
The Lyapunov function and the threshold line.
The simulation results show that the multi-thread control system can save significantly on computing and communication resources when the designed event-triggered mechanism is used. The state changes of the three subsystems are shown in Figure 6. It can be seen that the system is oscillating and attenuating. As shown in Figure 7, when the event-triggered mechanism is used, the input signals of the controlled plants are transformed alternately, and they maintain their values at the previous triggered moment until the next triggered moment. The sampling interval of the system is 0.001 s. Figure 8 shows that within 0–20 s, the three controlled plants are triggered for a total of times, each for , , and , respectively. Clearly, the triggered intervals of our proposed event-based multi-thread control system are much larger than the sampling intervals. The Lyapunov function of the system and the threshold line for determining the triggered time are clearly illustrated in Figure 9.
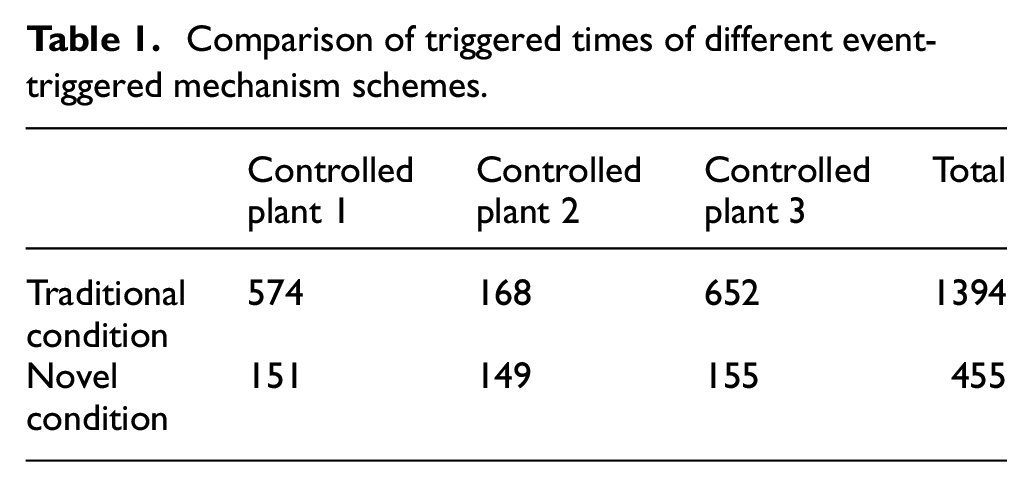
The traditional selection method of event-triggered rules: when the error range of the system exceeds the threshold of the state function, the event is triggered. We apply this scheme to the proposed multi-thread control system and simulate it. The results obtained are compared with the scheme designed in this paper as shown in Table 1. Obviously, the interval between events becomes longer and the number of events decreases. The event-triggered condition mechanism we propose can well solve the resource waste problem of multi-thread control systems.
Comparison of triggered times of different event-triggered mechanism schemes.
Controlled plant 1
Controlled plant 2
Controlled plant 3
Total
Traditional condition
574
168
652
1394
Novel condition
151
149
155
455
When there is a non-zero update delay in the multi-thread control system, assuming that the delay time is 0.001 s, the simulation results are as follows:
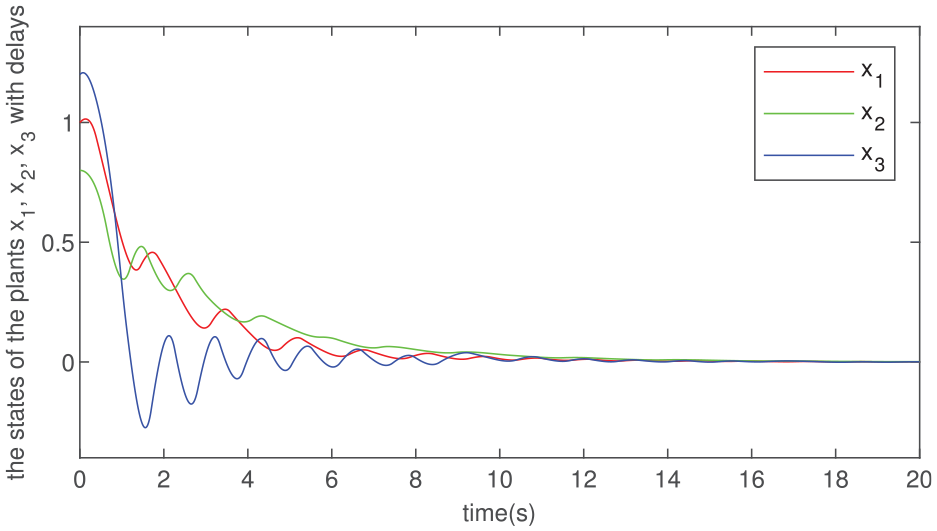
When the proposed multi-threaded control system contains update delays, the states of the three controlled plants are shown in Figure 10. The control signals of the system are visually presented in Figure 11. It can be seen that the control signals are updated more frequently than when there are no delays. Figure 12 shows the triggered plant at different event-triggered times when the system contains update delays. According to statistics, when the sampling interval remains unchanged, the system is triggered a total of times within 0–20 s, of which the three controlled plants are triggered , , and times, respectively.
The states of plants in the system with update delays.
The inputs of plants in the system with update delays.
The triggered plant at time k when the system has delays.
Conclusion
In this paper, by constraining the Lyapunov function below a set threshold line, we consider an event-triggered mechanism for a class of systems where the number of controllers does not match that of controlled plants. To describe this class of systems, the multi-thread control concept is utilized to establish equations for these systems. In the proposed multi-thread control system, we design an algorithm based on the event-triggered mechanism by setting the threshold line, and give the triggered scheme when the system has non-zero delays. Next, we ensure the stability of the system under triggered conditions without the Zeno phenomenon. Simulation results show that this novel event-triggered mechanism makes the switching time of the system longer. This in turn saves significantly on communication and computing resources. In future, we will focus on addressing varieties of the challenges about the multi-thread control algorithm based on event-triggered mechanism, such as event-triggered adaptive control for a class of uncertain nonlinear multi-thread control systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.
ORCID iD
Yixuan Wang
References
1.
AlurRCourcoubetisCHalbwachsN, et al. The algorithmic analysis of hybrid systems. Theor Comput Sci1995; 138(1): 3–34.
2.
AntsaklisPJ.A brief introduction to the theory and applications of hybrid systems. Proc IEEE2000; 88: 879–887.
3.
PeletiesPDeCarloR. Asymptotic stability of m-switched systems using lyapunov-like functions. In:
1991 American control conference, Boston, MA, 26–28 June 1991, pp. 1679–1684. New York, NY: IEEE.
4.
BranickyMS.Multiple lyapunov functions and other analysis tools for switched and hybrid systems. IEEE Trans Automat Control1998; 43(4): 475–482.
5.
BengeaSCDeCarloRA.Optimal control of switching systems. Automatica2005; 41(1): 11–27.
6.
KimSCampbellSALiuX.Stability of a class of linear switching systems with time delay. IEEE Trans Circ Syst I: Regul Pap2006; 53(2): 384–393.
7.
NingZZhangLLamJ.Stability and stabilization of a class of stochastic switching systems with lower bound of sojourn time. Automatica2018; 92: 18–28.
8.
ChengJShanYCaoJ, et al. Nonstationary control for t–s fuzzy markovian switching systems with variable quantization density. IEEE Trans Fuzzy Syst2020; 29(6): 1375–1385.
9.
LiSAhnCKXiangZ.Command-filter-based adaptive fuzzy finite-time control for switched nonlinear systems using state-dependent switching method. IEEE Trans Fuzzy Syst2020; 29(4): 833–845.
10.
HeSAiQRenC, et al. Finite-time resilient controller design of a class of uncertain nonlinear systems with time-delays under asynchronous switching. IEEE Trans Syst Man Cybern Syst2018; 49(2): 281–286.
11.
AstromKJBernhardssonBM. Comparison of riemann and lebesgue sampling for first order stochastic systems. In: Proceedings of the 41st IEEE conference on decision and control, Las Vegas, NV, 10–13 December 2002, vol. 2, pp. 2011–2016. New York, NY: IEEE.
12.
LailaDSNešićDTeelAR.Open-and closed-loop dissipation inequalities under sampling and controller emulation. Eur J Control2002; 8(2): 109–125.
13.
MontestruqueLAAntsaklisP.Stability of model-based networked control systems with time-varying transmission times. IEEE Trans Automat Control2004; 49(9): 1562–1572.
14.
TabuadaP.Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans Automat Control2007; 52(9): 1680–1685.
15.
WangXLemmonMD.Event design in event-triggered feedback control systems. In: 2008 47th IEEE conference on decision and control, Cancun, Mexico, 9–11 December 2008, pp. 2105–2110. New York, NY: IEEE.
16.
XingLWenCLiuZ, et al. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans Automat Control2016; 62(4): 2071–2076.
17.
GeXHanQLZhangXM, et al. Distributed event-triggered estimation over sensor networks: a survey. IEEE Trans Cybern2019; 50(3): 1306–1320.
18.
LiangHLiuGZhangH, et al. Neural-network-based event-triggered adaptive control of nonaffine nonlinear multiagent systems with dynamic uncertainties. IEEE Trans Neural Netw Learn Syst2020; 32(5): 2239–2250.
19.
SuXLiuXShiP, et al. Sliding mode control of hybrid switched systems via an event-triggered mechanism. Automatica2018; 90(1): 294–303.
20.
ZhangGLiJLiuC, et al. A robust fuzzy speed regulator for unmanned sailboat robot via the composite ilos guidance. Nonlinear Dyn2022; 1(1): 1–16.
21.
LiJZhangGLiB.Robust adaptive neural cooperative control for the usv-uav based on the lvs-lva guidance principle. J Mar Sci Eng2022; 10(1): 51.
22.
MaYSCheWWDengC, et al. Observer-based event-triggered containment control for mass under dos attacks. IEEE Trans Cybern2021; 1(1): 1.
23.
DengCWenCHuangJ, et al. Distributed observer-based cooperative control approach for uncertain nonlinear mass under event-triggered communication. IEEE Trans Automat Control2021; 67(5): 2669–2676.
24.
DengCWenCWangW, et al. Distributed adaptive tracking control for high-order nonlinear multi-agent systems over event-triggered communication. IEEE Trans Automat Control2022; 1(1): 1.
25.
RudinW. Principles of mathematical analysis. Vol. 3. New York, NY: McGraw-Hill, 1976.
26.
XiaoYCheWWMemberI.Neural-networks-based event-triggered consensus tracking control for nonlinear mass with dos attacks. Neurocomputing2022; 501(1): 451–462.