
Abstract
The event-triggered predictor design problem for a class of nonlinear MIMO systems with large time delays is investigated in this paper. A periodic event-triggered mechanism is designed to avoid unnecessary data transmission and save communication energy. The triggering condition is only determined by sampled outputs of the system, such that it is applicable in case of the communication delay. Then a novel observer-based cascade predictor is proposed to reconstruct the original system state based on the delayed and event-triggered measurements, which is composed of a continuous-discrete observer and several sub-predictors in a chain structure. The stability of proposed predictor is analyzed through the Lyapunov approach. By using a sufficient number of sub-predictors and applying appropriate parameters, the prediction errors converge to bounded regions exponentially under large time delays. Finally, simulations are performed to verify the effectiveness of the proposed predictor and the event-triggered communication mechanism.
Introduction
In remote control systems, communication resources, including bandwidth and computation abilities, are usually limited for individual agents. 1 To reduce the burden during communication, event-triggered mechanisms are proposed to avoid unnecessary data transmission, where the measurement signals are updated only when some events occur. Consequently, the event-triggered control scheme has attracted a lot of attention in recent years.2–4 The traditional event-triggering conditions5–7 have to be monitored continuously, which is hardly implemented in digital platforms with discrete data. Therefore, periodic event-triggered mechanisms are developed since the triggering condition is detected at regular intervals or just at every sampling time, such that the resulting communication strategies can avoid the Zeno behavior in nature.8–11
Observers are wildly used in nonlinear systems to design controllers12,13 or estimate external inputs. 14 In cases of event-triggered control systems, observer-based methods are usually applied to reconstruct the state variables.15,16 For example, an adaptive fuzzy state observer is proposed for nonlinear nonstrict-feedback systems under the event-triggered mechanism. 17 And a finite-dimensional observer-based control strategy is presented 18 to study the event-triggered output feedback stabilization of reaction-diffusion PDEs. Besides, several types of event-triggered observers are investigated to reconstruct the original system states based on the triggered sampled measurements, such as extended observers19,20 and high gain observers. 21 However, the event-triggered mechanisms presented in previous works are designed based on estimation results or observer errors. 22 Since the triggering conditions need to be identified prior to data transmission, these approaches are not acceptable in circumstances of communication delays when only delayed outputs are applicable to the observers.
Time delays are usually inevitable in the remote controlled systems owing to the long communication distances. 23 The delays can slow down the response speed or destabilize the closed-loop systems.24–27 Thus, it makes important sense to design observers/predictors that can reconstruct the original states in real time based on the delayed measurements. While traditional methods can be utilized to compensate the small time delays,such as Smith-predictor, 28 model predictive controller, 29 and observer-based predictors, 30 however, the state prediction for system under large time delay remains an open issue.
In order to estimate the system state under arbitrarily large delays, the cascade prediction approaches are proposed. 27 By using several sub-predictors in series, each of them predicts the state of the preceding one over a minor prediction horizon, and the last subsystem provides an estimation of the actual system state. By this way, every sub-predictor just handles a small fraction of the overall time delay, such that the stability and reliability of the prediction system can be improved. 31 Then, this approach is extended to the case of sampled measurements32,33 and applied to estimate the actual states of mechanical systems with large transmission delays. 24 But the event-triggered communication mechanism is not considered in those researches.
In this paper, a novel periodic event-triggered mechanism is proposed for a class of nonlinear MIMO systems with communication delays. Then, an observer-based cascade predictor, which is composed of several sub-systems in a chain, is designed to estimate the original system states based on the event-triggered sampled measurements with an arbitrary large time delay. The stability of the proposed predictor is analyzed through the Lyapunov approach. By using a sufficient number of sub-predictors and applying appropriate parameters, the prediction errors converge to bounded regions exponentially. The main novelties of this paper are concluded as follows:
Differently from the previous works8,20,22,34 where the estimation results of observers are utilized in the triggering condition, the periodic event-triggered mechanism in this paper is designed by using only sampled outputs, making it usable in situations when communication delays occur.
Under the designed event-triggered method, a novel prediction algorithm is proposed for a class of nonlinear system, which is different from the existing cascade predictors.32,33,35 Through applying a continuous-discrete observer in the first place, the original continuous system states can be reconstructed by using delayed and event-triggered sampled measurements.
The article is formulated as follows: The mathematical model and problem statement are given in the next section. Then, the main results including the designs of event-triggered mechanism and cascade predictor are presented in Section III. And the proposed method is verified through simulations for a multi-degree-of-freedom robotic system in Section IV. Finally, Section V concludes this paper.
Problem statement
Consider a class of nonlinear MIMO systems described as:

where
In this paper, one objective is to propose an event-triggered mechanism to decide when sampling output

where

where
The following Lemma is useful in the subsequent analysis.
Lemma 1
36
: Consider a differentiable function

where

with
Main results
Periodic event-triggered communication mechanism
In order to reduce the amount of data transferred, the transmission instants

where



and
Since the triggering condition is judged before communication and prediction, only error
Cascade predictor design and stability analysis
The proposed predictor for system (1) with the delayed and event-triggered measurement (2) is presented in the following, which contains

and

where
From equations (10), the 0th subsystem is actually a continuous-discrete time observer,
37
while each of remained subsystems predicts the value of previous one
and also the prediction errors


First, the dynamic of estimation error

where

Next, for



It can be concluded from the definitions in (12), (13), and (19)–(21) that

where
Thus, the time derivative of
where

where
(A) Enough sub-predictors are employed such that

(B) The predictor gain



where


where
Under the event-triggered mechanism (6), we have
Noticing that
One obtains
where
According to Lemma 1, there is
where
Sencond, consider the following Lyapunov-Krasovskii functional, for

where


Let

then

where
By substituting equations (18), (19), and (21), the time derivative of
Then, using the Cauchy-Schwarz inequality derives

Based on inequalities (24), (44), and Young’s inequality, the
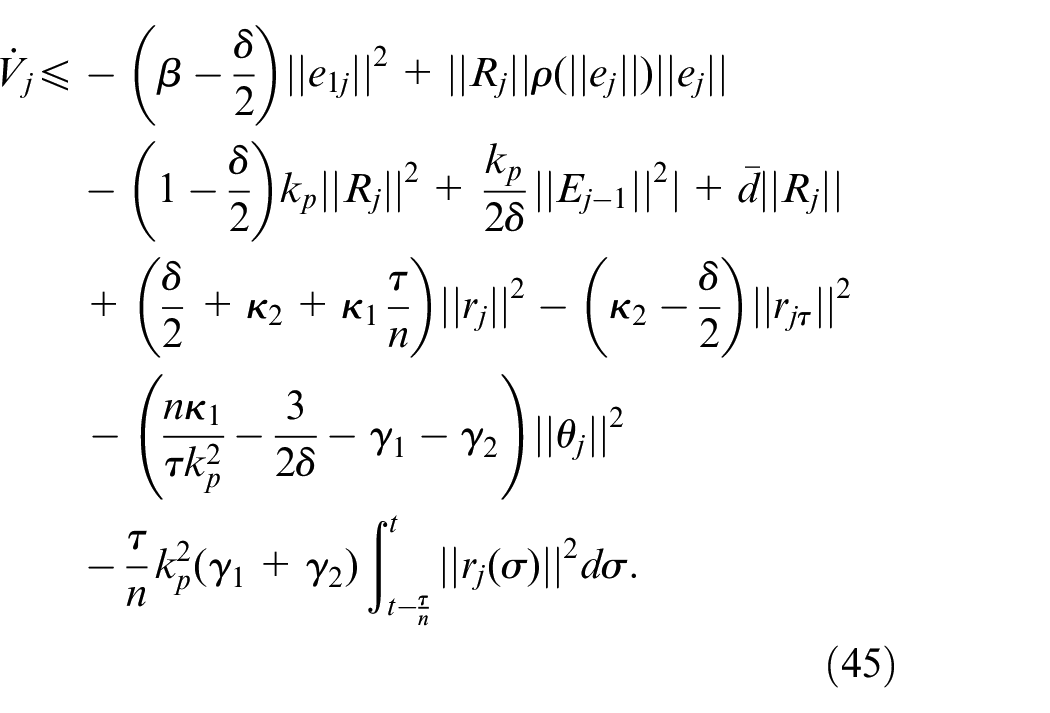
where
Further, consider the following inequalities
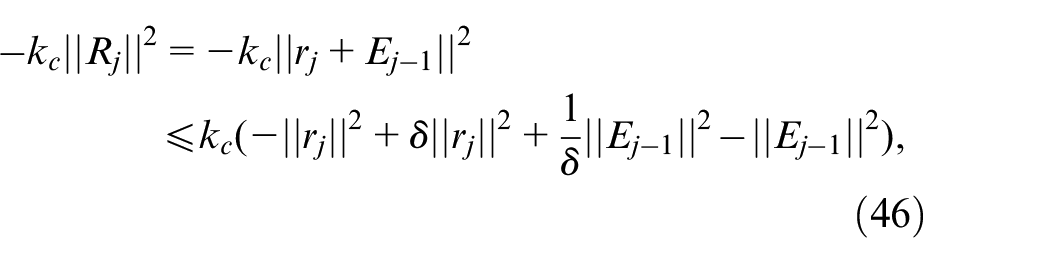
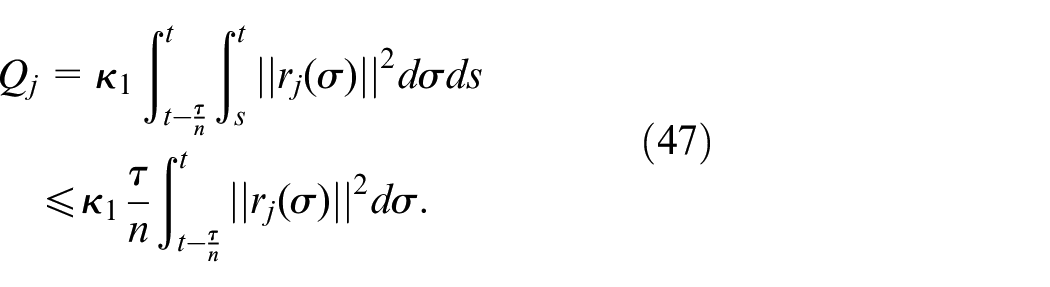
Through completing the squares in (45), the upper bound of
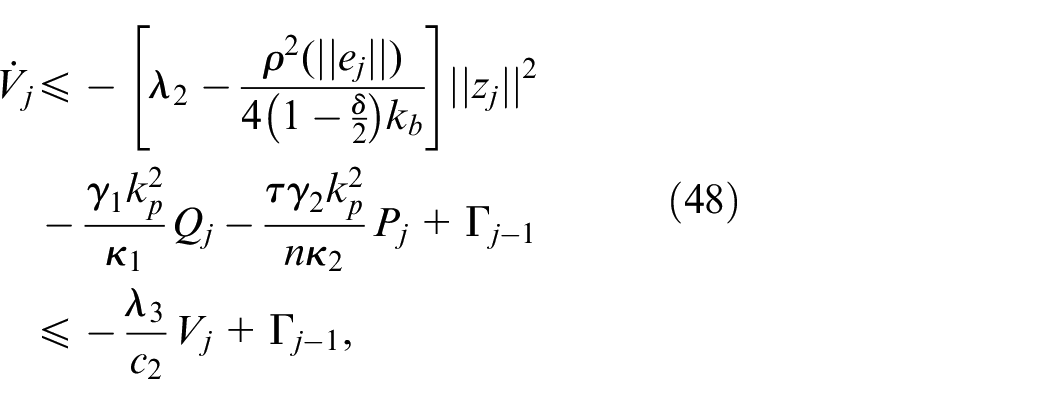
where


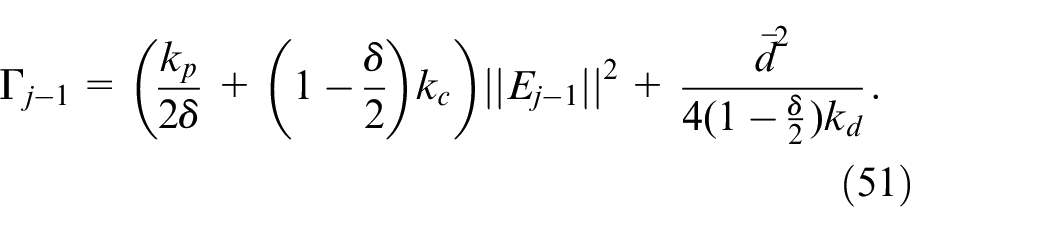
By using the comparison lemma, we can conclude that

From (51),
Simulations
The simulations of a 2-DOF (degree of freedom) robotic arm are performed in this section by applying Matlab/Simulink software. The dynamic model of the robot is described through the following Euler-Lagrange equation:

where
First, the performance of proposed event-triggered mechanism is studied through selecting different parameters, when the total simulation duration is set as 30s. The trigger instants under several variable values of
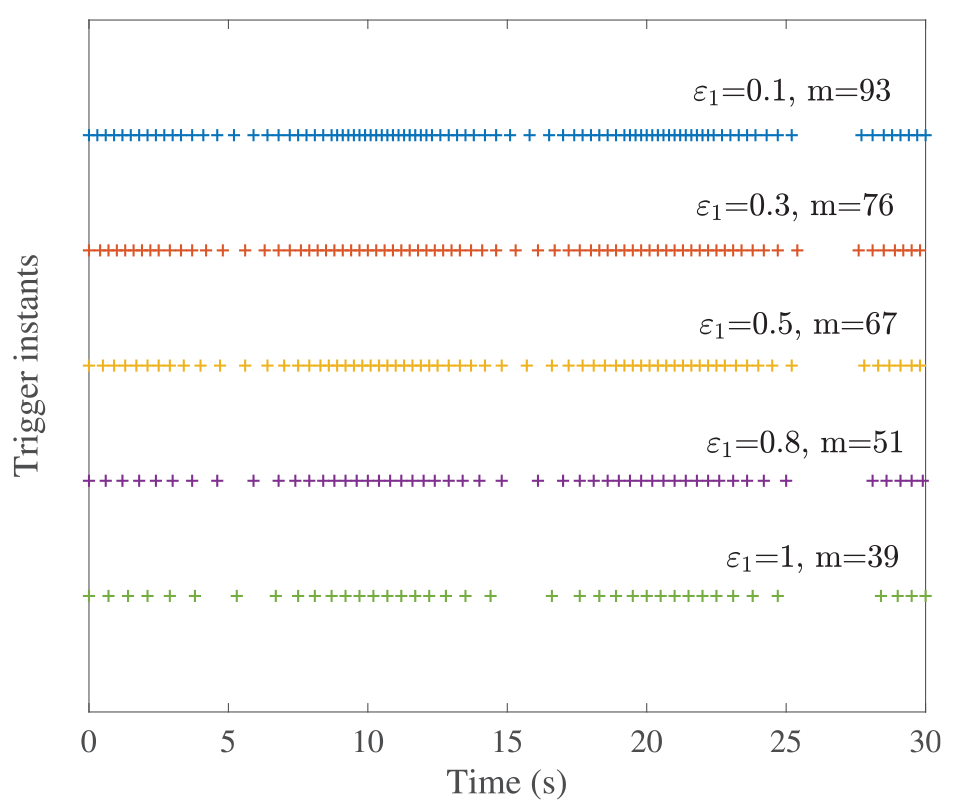
Event-triggered instants with different
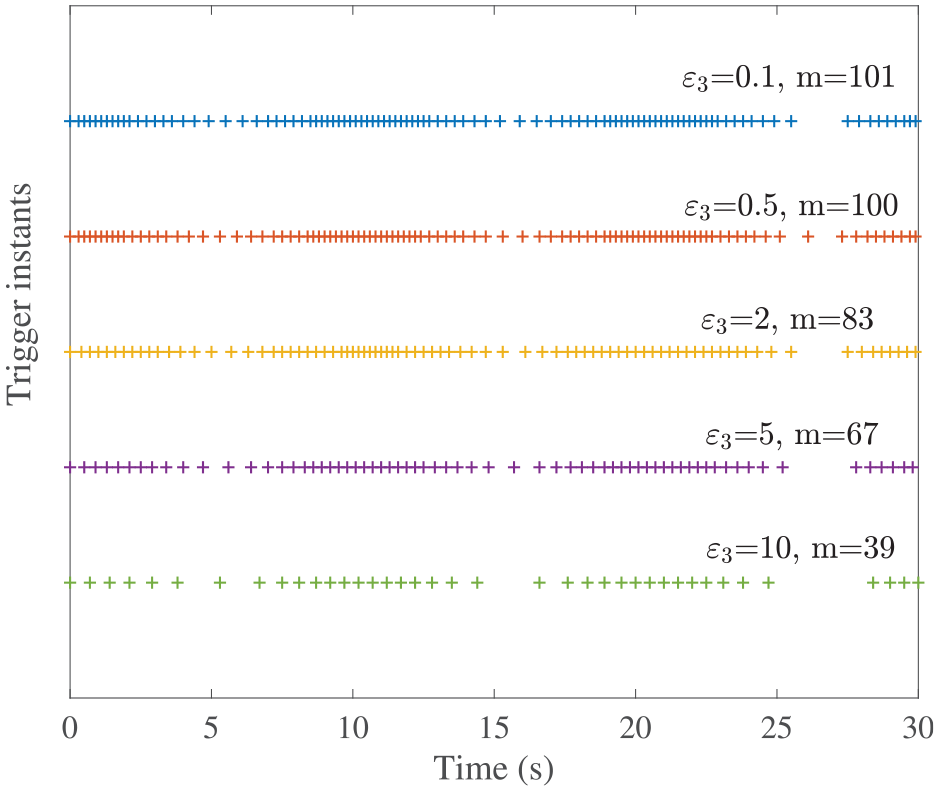
Event-triggered instants with different
The trigger counts and data transmission ratios with different
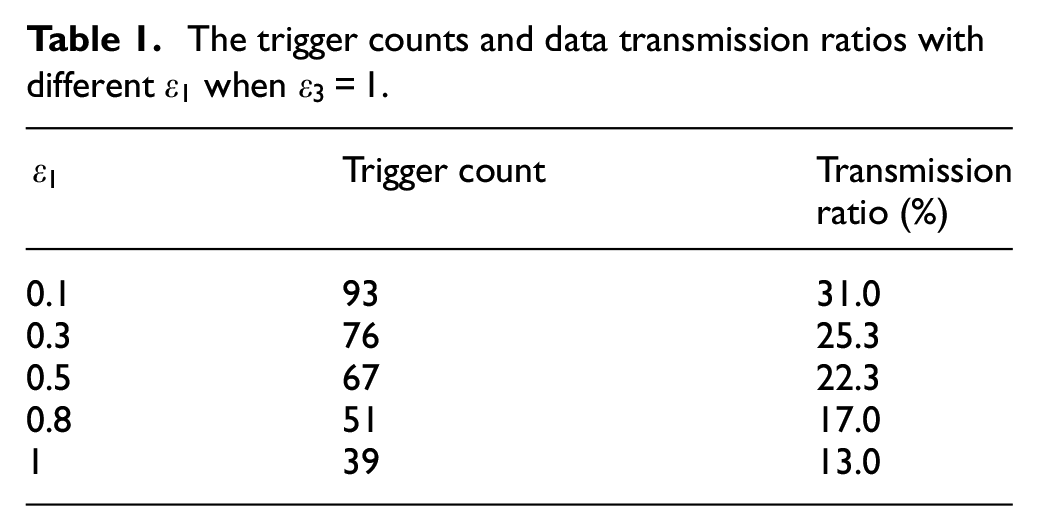
The trigger counts and data transmission ratios with different
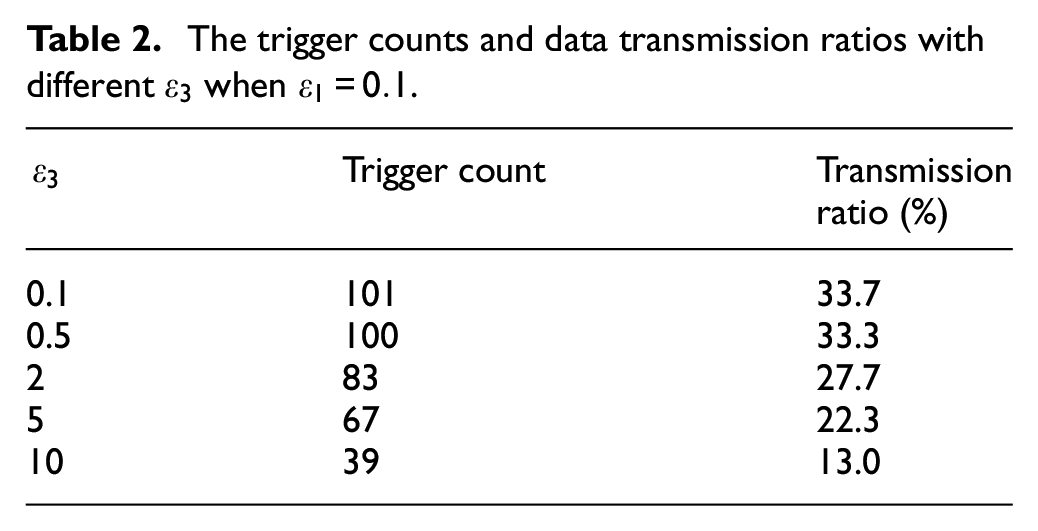
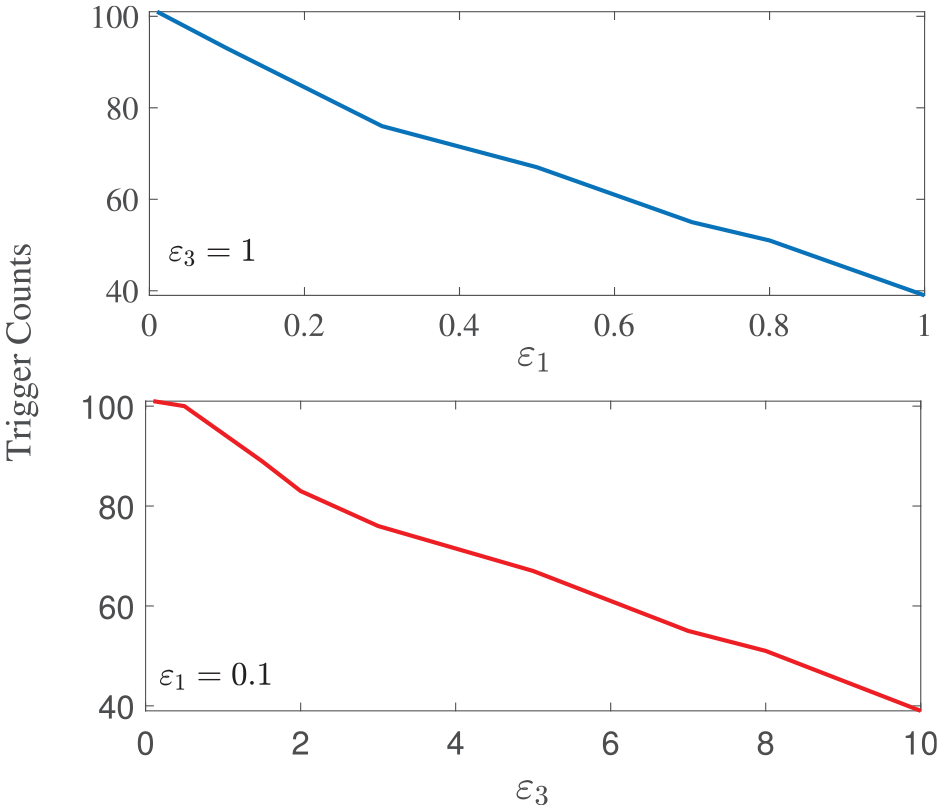
Event-triggered counts as
Second, by setting the parameters as
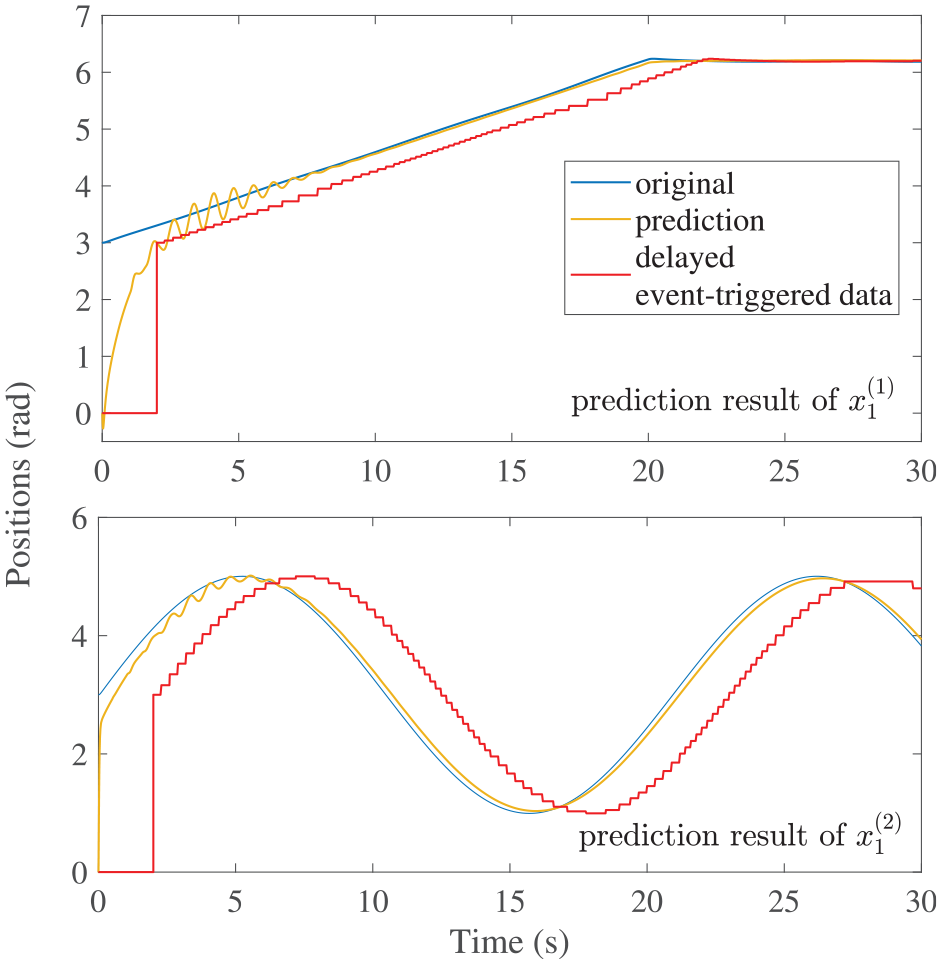
The position prediction results of 2-DOF robotic arm.
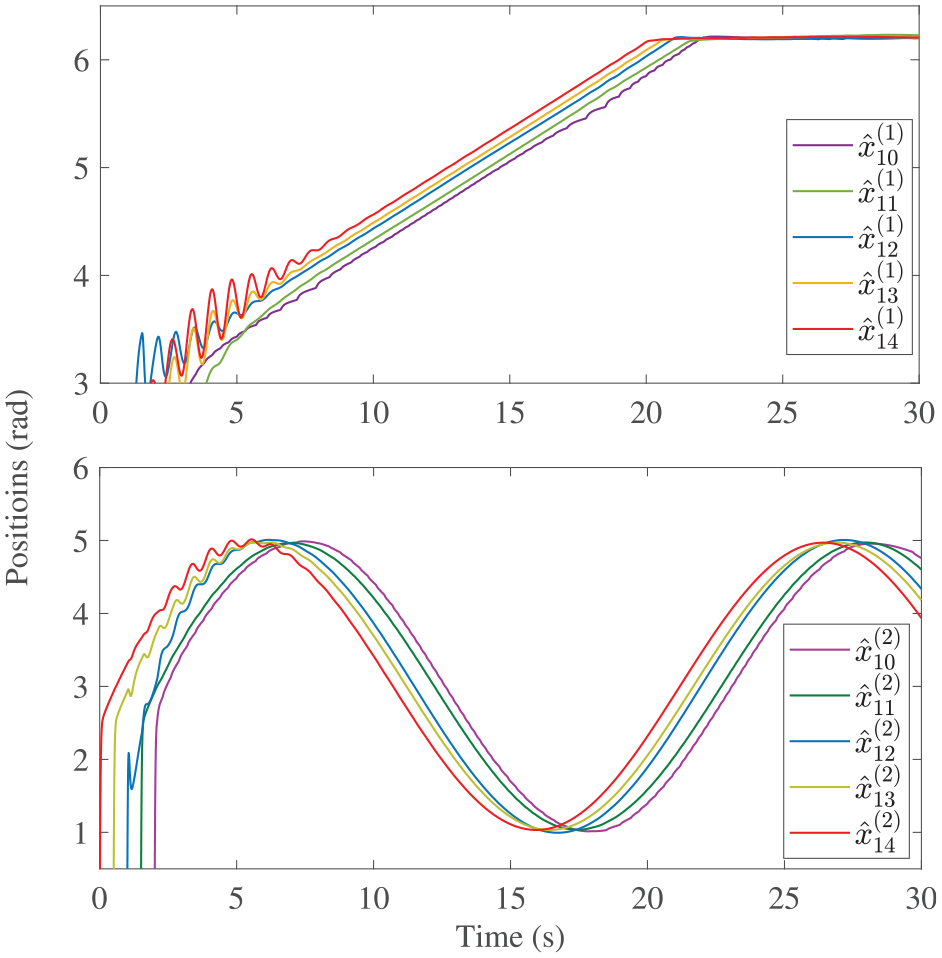
The outputs of every sub-predictors of two joint positions.
Next, the prediction errors of proposed predictor under different communication delays, that is
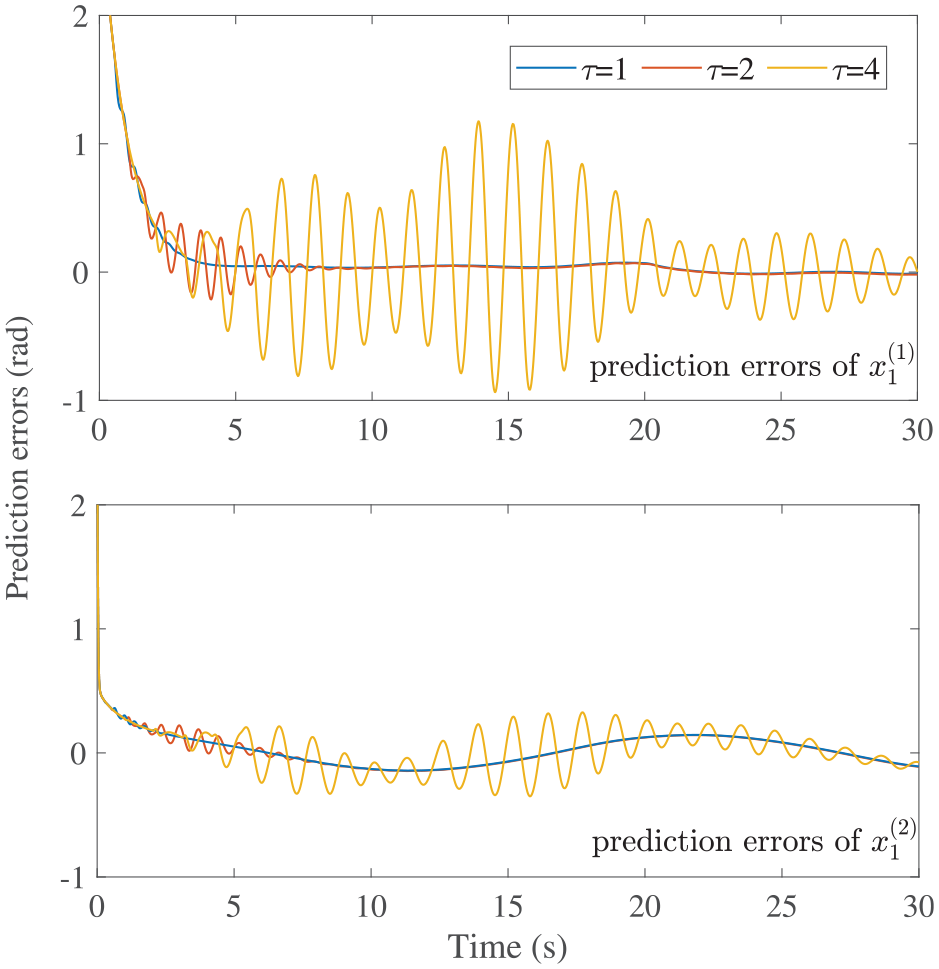
Prediction errors of proposed predictor under different communication delays.
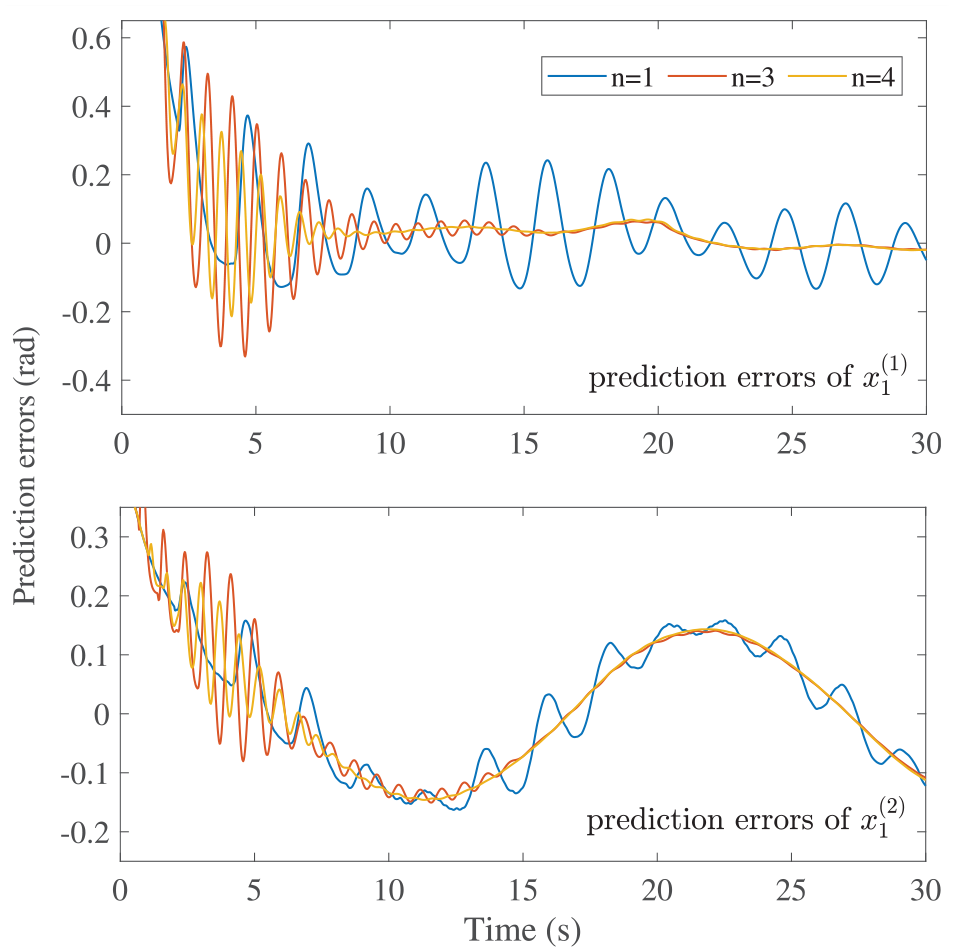
Prediction errors of proposed predictor with different numbers of sub-predictors.
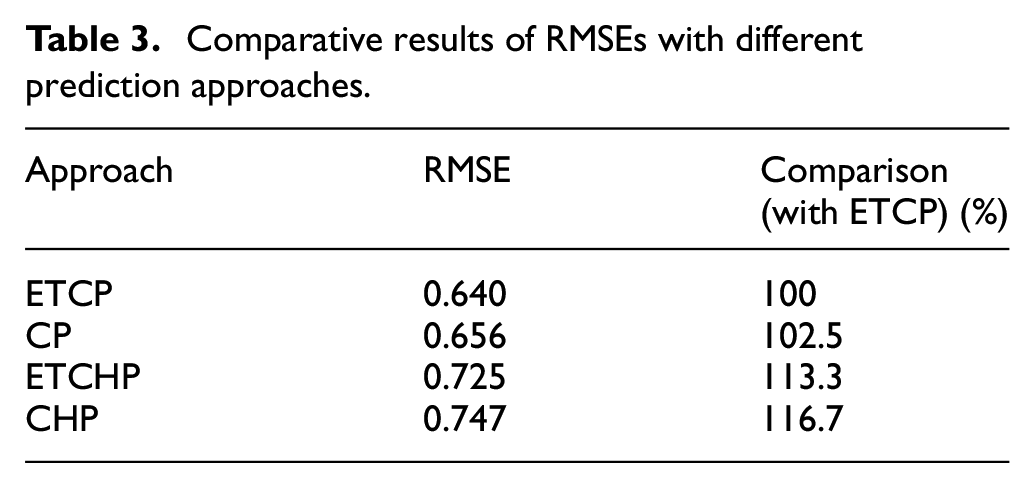
Finally, the proposed method is compared with the conventional cascade high-gain predictor. 30 The following four cases are studied respectively: (a) the proposed cascade predictor under event-triggered mechanism (ETCP); (b) the proposed cascade predictor using sampled data without event-triggered mechanism (CP); (c) the cascade high-gain predictor under event-triggered mechanism (ETCHP); (d) the cascade high-gain predictor using sampled data without event-triggered mechanism (CHP). The prediction errors of these for cases are given in Figure 8, and the root-mean-square errors (RMSEs) are calculated and compared in Table 3. For both the proposed method and the cascade high-gain predictor, it can be seen that the errors under event-triggered mechanism are close to the ones using sampled data, which indicates that the proposed event-triggered communication mechanism does not reduce the prediction accuracy while reducing the data transmission. Besides, the results also shown the RMSEs of proposed method are smaller than the conventional high-gain predictor. The accuracy and rapidity of the proposed event-triggered predictor in this paper are verified.
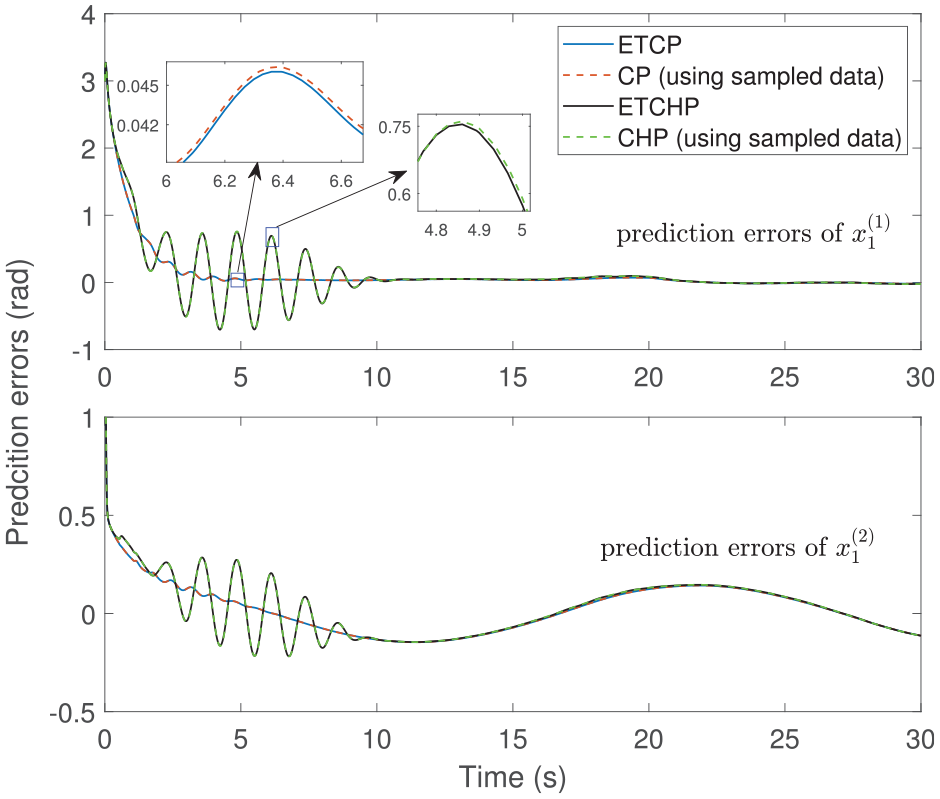
Comparative results of prediction errors with different approaches.
Comparative results of RMSEs with different prediction approaches.
Conclusions
A cascade predictor has been designed for a class of nonlinear MIMO systems with time delays. Under the proposed periodic event-triggered communication mechanism, the prediction errors can converge to bounded regions according to the Lyapunov method. The simulations presented the effectiveness of the proposed event-triggered mechanism, which can reduce data transmission properly through tuning parameters. And the accuracy of prediction results under large delays has also been verified through employing enough sub-predictors and applying appropriate parameters. The RMSE of proposed method is reduced by 13% compared with the conventional high-gain predictor. Since the algorithm is the same for each sub-predictor, the proposed cascade predictor is easy to be implemented in practical applications. Future works will be focused on the advance controller design by using the proposed predictor and the its implementation to real network control systems.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by the National Natural Science Foundation of China under Grant No.62303074, the Changzhou Sci&Tech Program under Grant No. CJ20235021 and the Natural Science Foundation Program of Gansu Province under Grant No. 22JR5RA272.
Data availability statement
Data sharing not applicable to this article as no datasets were generated or analyzed during the current study.