
Abstract
When the variable speed pumped storage unit operates in the electrical state, the self-starting control strategy is generally used to start the process from zero speed to grid connection, which saves the starting device of the traditional constant speed unit and saves the construction cost of the unit. For the self-starting control process, the traditional open-loop flux calculation method will produce cumulative errors in the amplitude and angle of the flux when the motor parameters change. To solve this problem, an adaptive full order state observer is designed to observe the motor stator flux, which has stronger parameter robustness. Based on the flux observation, the speed adaptive law is designed to estimate the rotor speed and position angle, and the speed sensorless vector control of variable speed pumped storage unit is accomplished. The simulation results show that compared with the open-loop flux calculation method, the full order state observer can greatly reduce the flux estimation error and accurately estimate the rotor speed and position angle.
Keywords
Introduction
In recent years, with the increasingly severe situation of energy crisis, the international community has paid more attention to new energy development technologies. In the power industry, renewable energy power generation technology such as wind energy and solar energy is becoming more and more mature, and the inherent intermittence and instability of this type of renewable energy also brings new challenges to the balance control of power system. As one of the means of large capacity energy storage, pumped storage power station has the functions of peak shaving, valley filling, frequency modulation, phase modulation and accident standby, and has made great contributions to the safe and reliable operation of power systems all over the world. 1
At present, most of the pumped storage power stations put into operation are traditional constant speed units, which generally use synchronous motors, and their speed is determined by the frequency of the power grid. When the reservoir head changes, it is unable to make continuous and accurate adjustment, and the unit can’t maintain optimal efficiency operation, which will cause oscillation and cavitation of the pump turbine and reduce the service life of the unit. 2 To solve the above problems, variable speed pumped storage units (VSPSU) is proposed. The VSPSU adopts doubly fed motor, its stator end is connected to the power grid, and its rotor end is connected to the converter for excitation. The motor speed can be stepless adjusted near the rated speed, and the adjustment range is generally ±10%. 3 Compared with the traditional constant speed unit, the variable speed unit has the advantages of improving the dynamic regulation performance of power and speed and the operation efficiency of the unit. 4
When the pumped storage power station operates in the power generation state, the water flow pushes the water turbine to drive the generator for power generation; under the pumping condition, the traditional constant speed pumped storage unit generally needs to use a static frequency converter (SFC) to realize the no-load start of the unit, but the additional SFC device is very expensive. 5 At present, most literatures focus on the dynamic and static performance of variable-speed pumped storage units under power generation and electric state, and there are few studies on the performance improvement of self-starting process under electric state. 6 Morel et al. 7 first proposed the self-starting control strategy of variable speed unit, which connected the end of the stator winding to each other and carried out AC excitation through the rotor to realize the zero speed self-starting of VSPSU, thus omitting the SFC device, greatly saving the unit construction cost and laying a foundation for the in-depth study of the unit self-starting scheme. Pannatier et al. 8 has further studied the above methods and proposed a self-starting scheme based on stator field orientation. Shao et al. 9 makes an in-depth analysis of the mechanical characteristics in the self-starting process, and puts forward a closed-loop self-starting scheme based on state observer, and makes a quantitative analysis of the starting characteristics of the scheme, which provides a theoretical basis for the application of VSPSU in power system. However, Fan et al. 9 doesn’t give the specific design process of applying full order state observer (FOSO) to VSPSU. To solve this problem, the dynamic and static processes of FOSO and open-loop calculation are compared and analyzed in this paper.
In many literatures, FOSO is mostly used for the estimation of motor speed, taking the flux linkage and current as state variables.10,11 For example, in Song et al., 12 the pole assignment method is used to design the feedback increasing matrix G, and the sensorless control of asynchronous motor is realized. However, the adaptive law of speed identification is not given in this reference. Chen et al. 13 deduces the speed adaptive law based on Lyapunov stability theory, establishes the small signal linearization model of motor control system, analyzes the reasons for the instability of low-speed estimation caused by ignoring the flux error term in the derivation of the adaptive law, then the reference transforms the flux error term, and puts forward an improved speed observation method. In recent years, many improved algorithms have been proposed to solve the problem of unstable low-speed observation of the asynchronous generator FOSO. Orlowska-Kowalska 14 compares four improved algorithms: (1) Select the appropriate feedback gain matrix G 15 ; (2) The speed adaptive law is modified based on the offset angle between the stator current estimation error vector and the rotor flux vector 16 ; (3) Select the feedback gain matrix G, modify the speed adaptive law, and introduce the gain factor M 17 ; (4) Additional auxiliary variables are introduced into the state matrix. 18 Then a unified mathematical model is proposed, by analyzing the stability of each algorithm, their advantages and disadvantages are summarized.
The harsh operating environment of VSPSU will affect the detection accuracy of the speed sensor. Long-term operation will lead to large detection errors, reduce the excitation control performance, and even make the unit unable to operate normally. The effective solution is to use the speed sensorless control strategy to estimate the motor rotor speed and position angle. The excitation control of VSPSU in the power generation state is very similar to that of wind power doubly fed induction generator. There are many speed sensorless control schemes for doubly fed wind power generation. However, the speed sensorless control strategy of VSPSU under electric state has only few relevant references, and the speed sensorless control strategy in the self–starting process has not been studied.
In the traditional VSPSU self-starting process, the robustness of stator flux calculation parameters is poor. In order to enhance the parameter robustness of the flux calculation method, FOSO is used to observe the stator flux, and the pole assignment method is used to design the feedback gain matrix. On this basis, a suitable adaptive speed identification law is designed to observe the speed of VSPSU. The use of speed sensors is omitted to enhance the stability of the unit in harsh environments. There is no stator flux error term in the designed adaptive law, so there is no low-speed instability region similar to the asynchronous generator. The effectiveness and feasibility of the strategy are verified by MATLAB simulation platform.
Mathematical model of VSPSU self-starting process
During the self-starting process, the stator winding is short-circuited, and the rotor winding is connected to the frequency converter for excitation control. The rotor current will generate an exciting magnetic field, whose speed is the sum of the current angular velocity
When establishing the mathematical model, it is assumed that the three-phase windings of the motor are spatially symmetrical, the magnetomotive force is sinusoidal distributed along the air gap, the motor parameters are unchanged, and the influence of magnetic field saturation in the motor is ignored. The three-phase static coordinate system mathematical model of the motor during VSPSU self-starting is as follows. 19
Voltage equation:

Where:



Where:
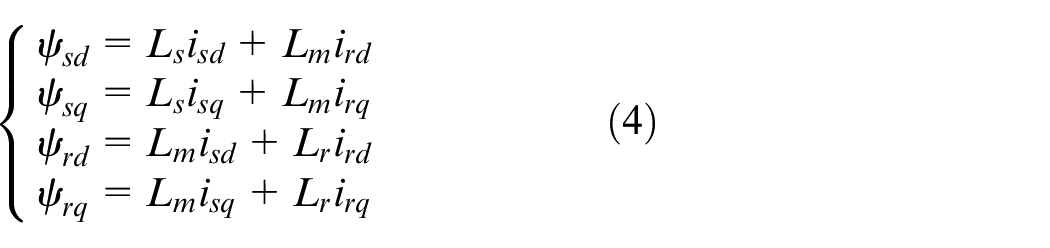
Flux linkage equation:

Where:




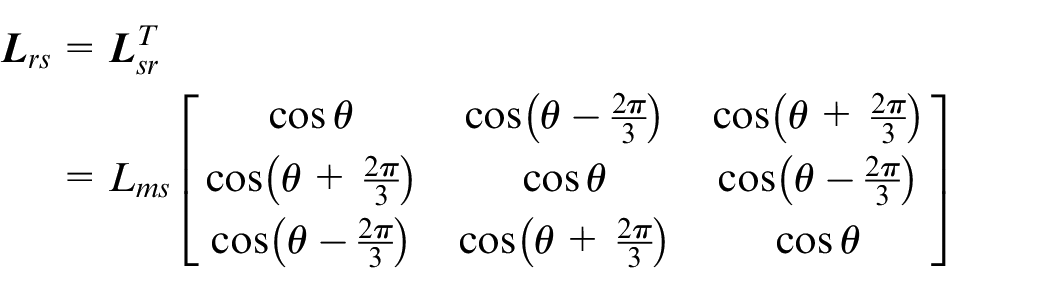
Where: subscripts
In this paper, the vector control startup mode based on stator field orientation is selected. Firstly, the coordinate transformation of the above formulas (1) and (2) is required to obtain the voltage and flux linkage equations in the d/q two-phase rotating coordinate system 20 :
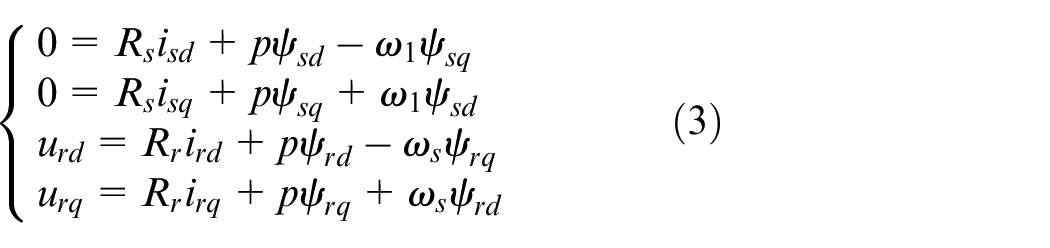
Where: Subscript d and q represent the d and q axis components;
By substituting the stator magnetic field orientation constraint

At the same time, the expression of rotor voltage with respect to rotor current and stator flux can be obtained as follows:

Where:
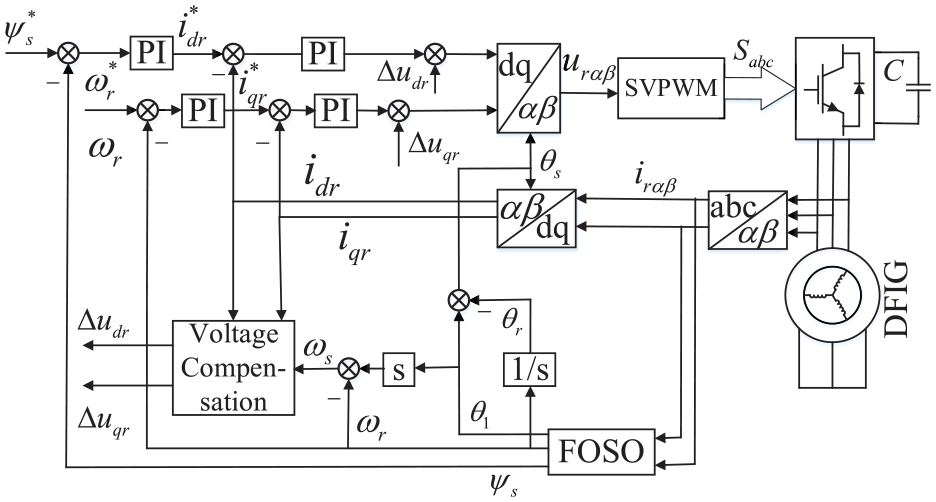
Equations (5) and (6) is the self-starting vector control equation of VSPSU. Thus, the vector control block diagram is constructed, as shown in Figure 1.
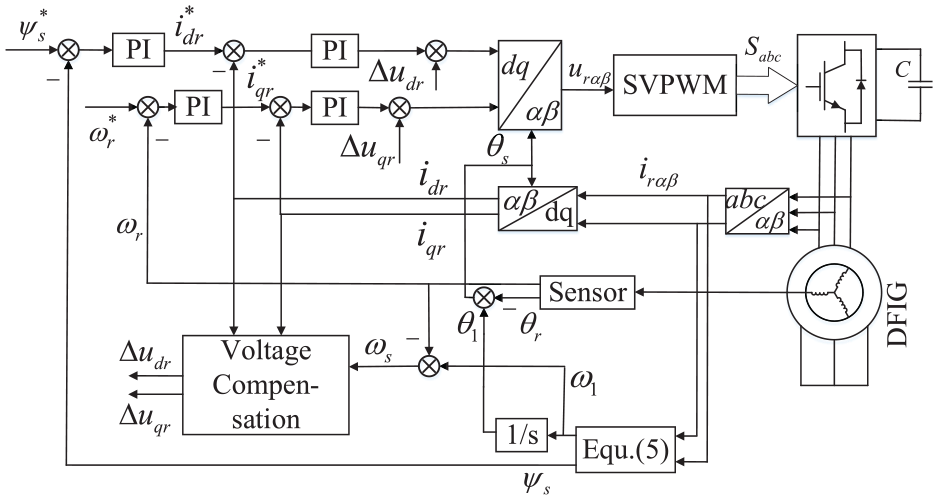
Block diagram of vector control for self-starting process.
Design of adaptive full order state observer
Stator flux observation
The above stator flux calculation method is an open-loop process. When the motor parameters change, the flux calculation will produce errors, resulting in inaccurate flux orientation, which will seriously affect the control performance of the self-starting process. In this paper, the stator flux and rotor current are used as state variables to construct the full order state equation:

State variable matrix
The rotor current estimation error constitutes the feedback correction term, and constitutes the state observer with the error feedback gain matrix

Where: the superscript ^ represents the observed value. The feedback gain matrix
It is easy to know that the characteristic equation of equation (7) is
It can be seen that the gain of the configuration feedback matrix is actually the selection of the
Speed estimation method
When the speed is also considered as a variable, equation (8) is rewritten as 23

The state error equation is

Where:
Constructing Lyapunov function

It’s easy to know, When
Assuming that
Since the change rate of speed is very small in a single sampling time, its derivative

The above formula is the adaptive law of speed estimation. Considering the rapidity of speed estimation, the proportional link can be added, that is, the PI adaptive law used in this paper can observe the speed
Where
According to the designed flux and speed observers, combined with the stator flux-oriented control strategy, the improved self-starting control block diagram can be obtained as follows (Figure 2).
Self-starting control strategy based on full order state observer.
Simulation results and analysis
In order to verify the feasibility and superiority of the full order state observer in the self-starting process proposed in this paper, the simulation model of VSPSU is established in MATLAB/Simulink environment, and the whole self-starting process is simulated. The motor parameters for the simulation are shown in Table 1.
VSPSU motor parameters.
In order to reflect the difference between the two flux observation methods, light load starting is adopted in the simulation, and the load torque is 200 N/m. Figure 3 shows the simulation waveform of the zero speed self-starting process under ideal parameters of VSPSU. The initial motor speed setting value is 0.8
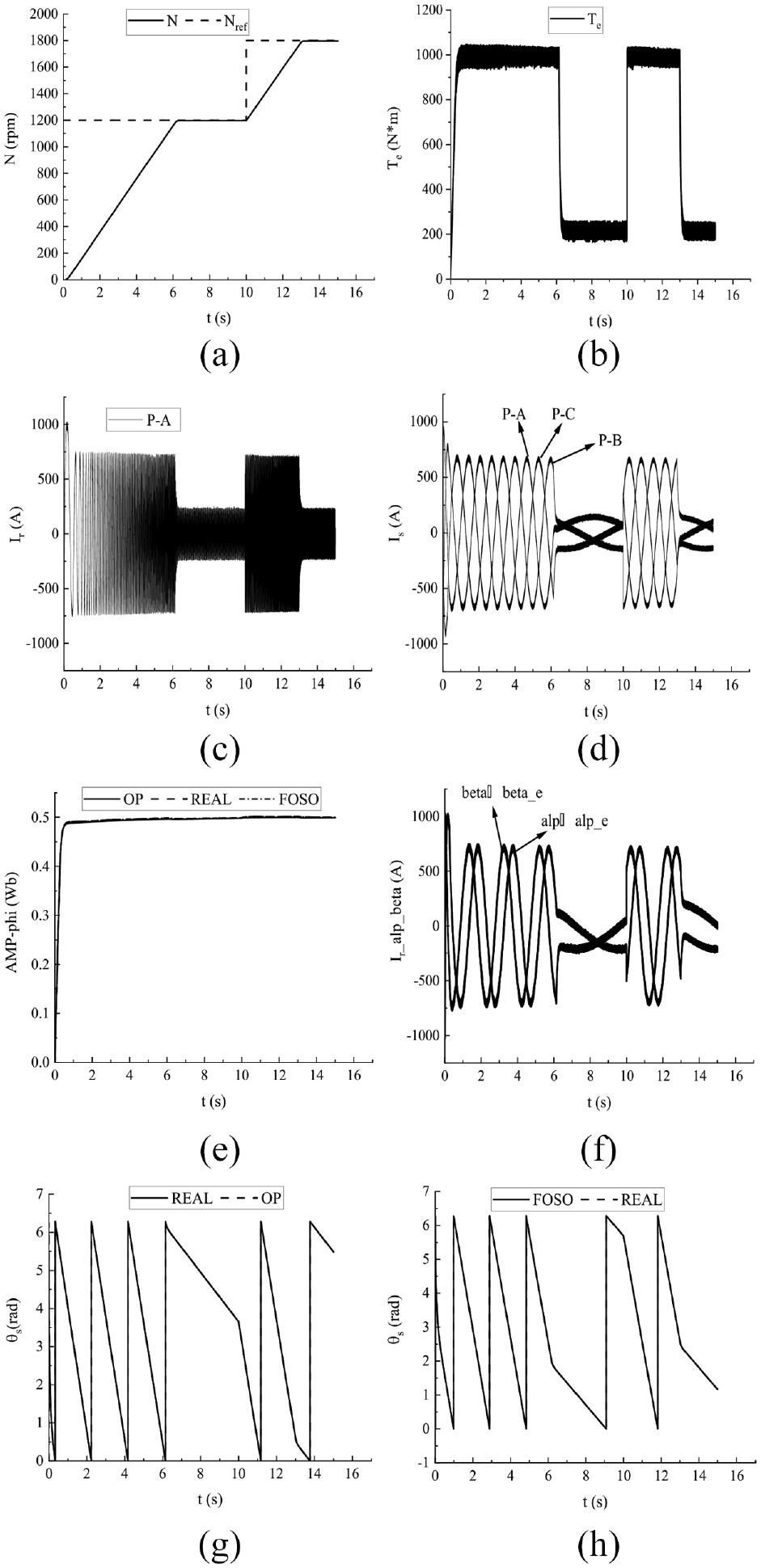
Simulation waveform of self-starting process under ideal parameters: (a) motor speed tracking waveform, (b) electromagnetic torque waveform, (c) rotor current waveform, (d) stator current waveform, (e) rotor flux amplitude waveform, (f) FOSO rotor current estimation and actual waveform, (g) OP stator flux position angle, and (h) FOSO stator flux position angle.
It can be seen from Figure 3(a) that the motor speed can quickly track the given value from zero and accurately track when the given speed changes step by step, in which
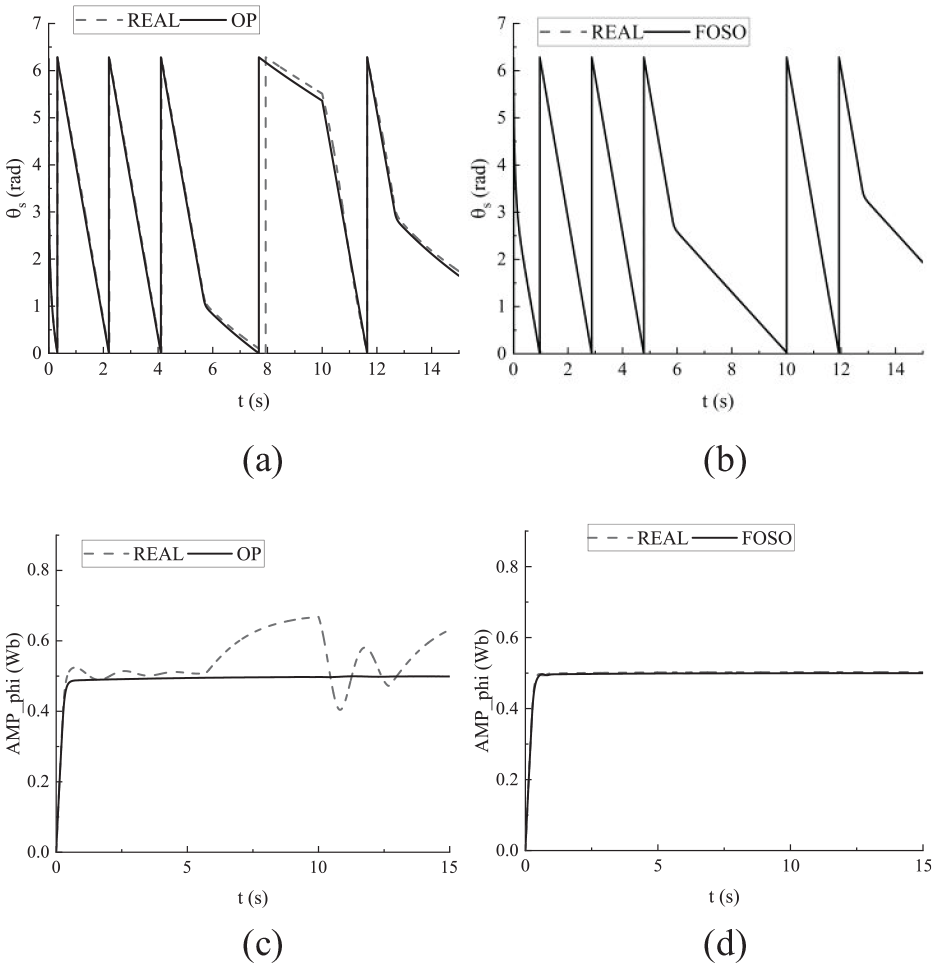
Figure 4 shows the simulation waveform of the self-starting process using two algorithms under variable parameters. At this time, the stator resistance is taken as 1.5 times of the actual value of the model. Compared with Figure 4(a) to (d), it can be seen that due to the error of parameters in the stator flux calculation model, OP can’t accurately estimate the flux amplitude and position angle, the amplitude error of flux linkage reaches 0.3 Wb, and the position angle error increases with the passage of time due to the integral effect. Because the current error is introduced as feedback, the FOSO algorithm can modify the flux calculation results to reduce the estimation error caused by parameter changes, the amplitude error is limited to 0.05 Wb. Since the electromagnetic torque is positively correlated with the amplitude of stator flux linkage, the variation law of electromagnetic torque waveform in Figure 4(e) and (f) is consistent with their respective flux linkage variation law.
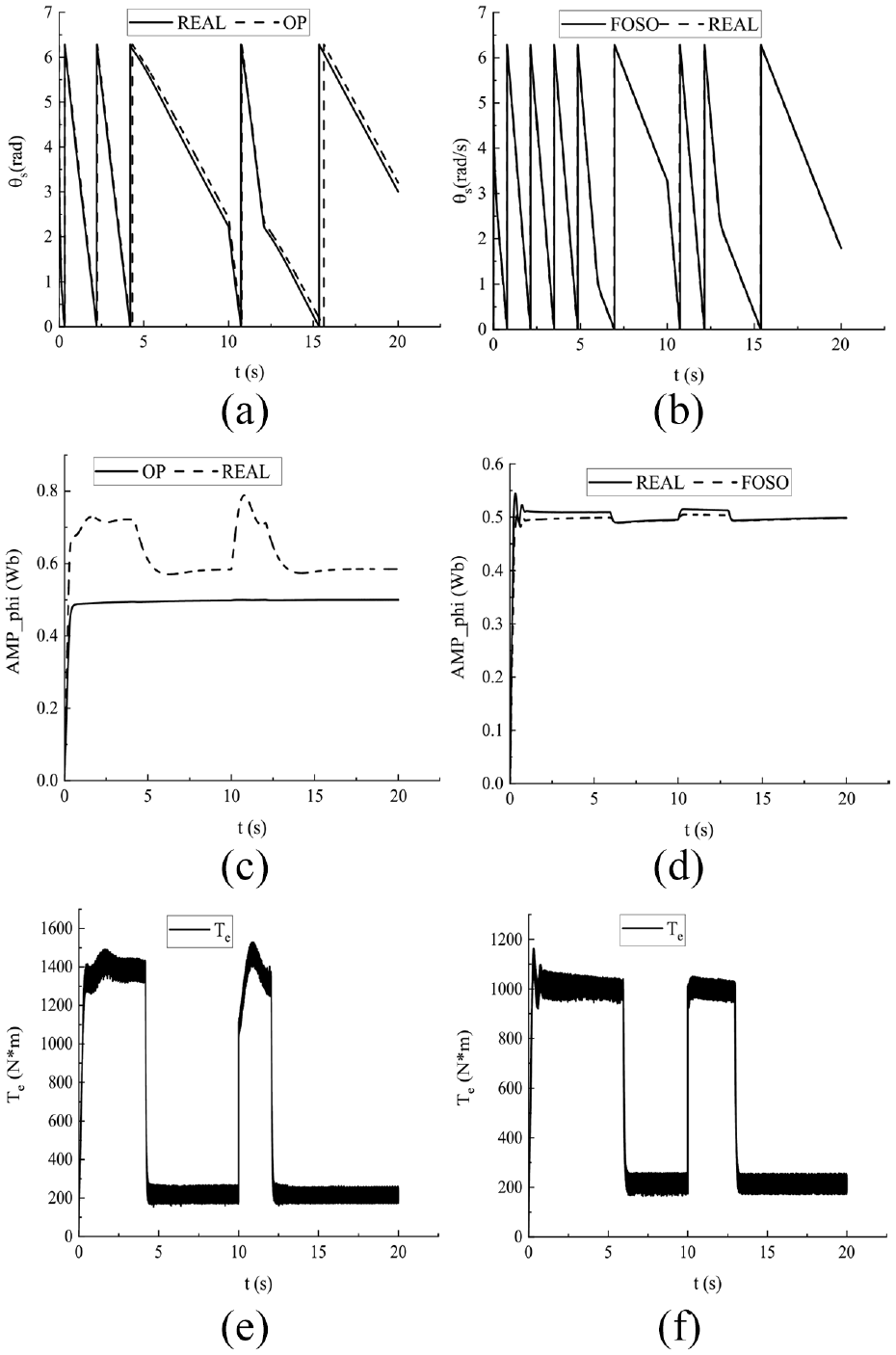
Simulation waveform of self-starting process when
Similarly, by changing other parameters of the motor, it is found that the rotor resistance, stator leakage inductance and rotor leakage inductance change have little influence on the stator flux calculation results and can be ignored. When the mutual inductance changes, there is a large error in the flux estimation result of OP, while FOSO can still estimate the flux accurately. The waveform comparison is shown in Figure 5.
Simulation waveform of self-starting process when
When the motor parameters change, the performance of the two algorithms to calculate the stator flux is summarized in Table 2.
Comparison of parameter robustness of two algorithms.
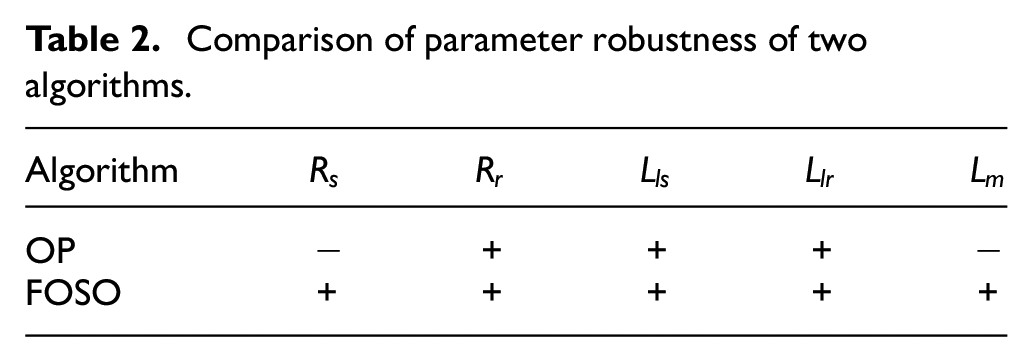
Figure 6 is a simulation waveform for estimating rotor speed and position angle using the designed speed identification adaptive law. Figure 6(a) shows the speed tracking waveform, which shows that the estimated speed can well track the actual speed, and Figure 6(b) shows the tracking error waveform. Only at the starting time and speed step change time, the speed estimation error is large, but it can also be maintained within 15 rpm, and there is no low-speed instability phenomenon of FOSO for asynchronous motor speed estimation, because there is no flux error in the derivation of speed identification adaptive law. Figure 6(c) shows the rotor position angle estimation waveform. There is an estimation error at the initial time, and then it converges quickly to follow the actual value. The above conclusion proves that the speed identification adaptive law based on FOSO has good speed and position angle estimation performance.
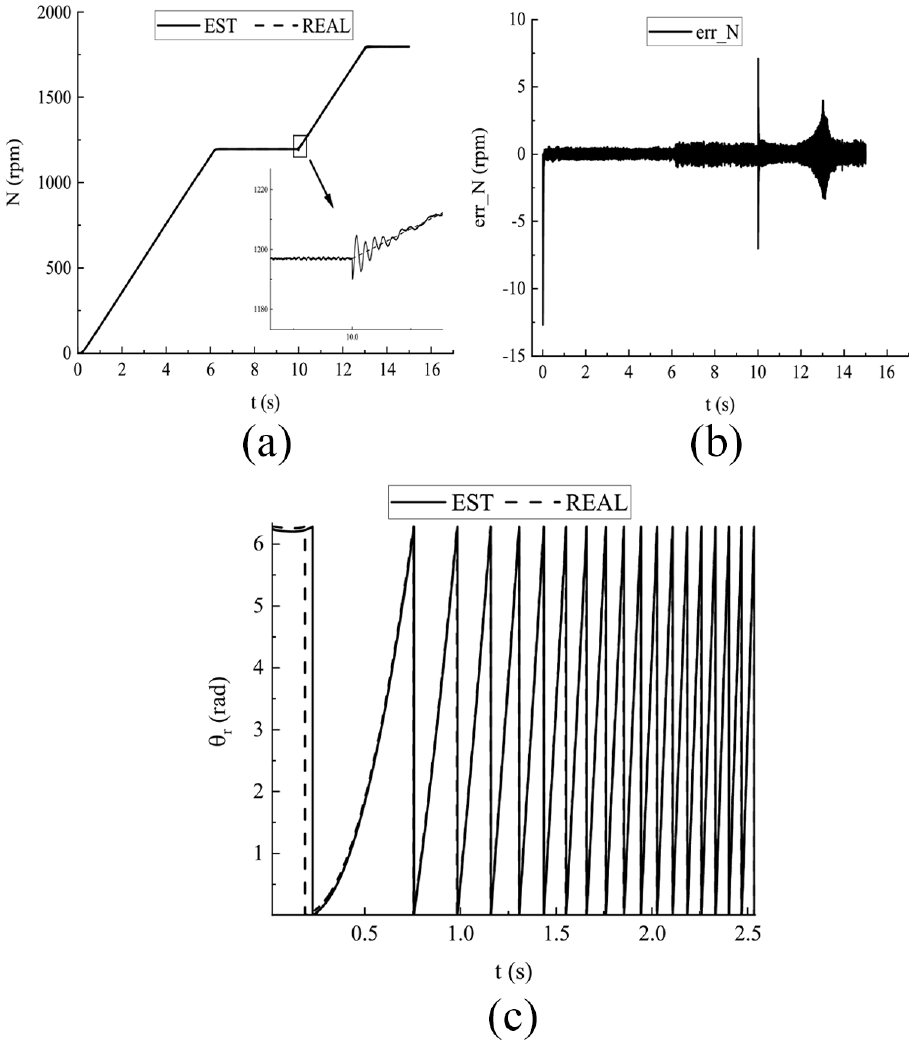
Estimated waveform of rotor speed and position angle: (a) speed tracking waveform, (b) speed error waveform, (c) rotor position angle tracking waveform.
Conclusion
To address the problem of poor parameter robustness of the traditional OP flux calculation method, the FOSO flux estimation algorithm is proposed, and an adaptive law for rotor speed identification is designed based on the algorithm, which is used to estimate the rotor speed and position angle, so as to overcome the disadvantage that the encoder is easy to be affected in harsh environment. The correctness and effectiveness of the proposed method are proved by simulation. The conclusions are as follows:
Both algorithms can realize stable self-starting process under ideal parameters.
In the case of variable parameters, the flux linkage calculated by OP method has errors, in the simulation results, the amplitude error reaches 0.3 Wb, and the errors accumulate with time; the FOSO estimation method can greatly improve the accuracy of flux estimation, the amplitude error is limited to 0.05 Wb and is not affected by time. Its parameter robustness is strong.
The designed speed identification adaptive law can accurately estimate the motor speed and rotor position angle, the maximum speed estimation error is 15 rpm, and within the acceptable range.
The results show that the algorithm proposed in this paper realizes the accurate and fast self-starting of VSPSU, which is of great significance for the practical application of speed sensorless control of units in variable speed pumped storage power station.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
This work was supported in part by the National Key Research and Development Project under Grant 2019YFC1908100.