
Abstract
Inertial navigation system (INS) is widely used as inclinometer in coal drilling rig to realize navigation and attitude measurement. Vibration of coal drilling rig is one of the significant issues impacting the performance of alignment. Previous work has indicated that part of alignment error caused by vibration of gyroscope can be suppressed by inertial alignment frame. However, vibration error of accelerometer cannot be well suppressed. In this paper, an inertial alignment based on improved empirical mode decomposition (EMD) filter is proposed to address vibration issue in alignment. Moreover, a prediction strategy of extreme endpoints based on relativity of extreme points is proposed to reduce the endpoint error to suppress the accumulative error in EMD filter. The proposed alignment method is applied in laboratory condition. The result shows that the stability of accelerometer improves 42.43% at most, the alignment time reduce from 300 to 100 s and the alignment error of inclination angle is less than 5.4 arcmin. The experiment in coal mining rig shows the alignment time reduces from 300 to 50 s. The proposed alignment method improves the performance of inclinometer effectively and feasibly in alignment period and the improved EMD filter can be also applied in navigation period to suppress the vibration error of accelerometer.
Introduction
Gas draining is very important to ensure the safety of production before coal mining. The gas is mainly drained through boreholes which are pre-designed in certain azimuths and inclination angles. Inclinometer is usually assembled on drilling rig to track the trajectory of pre-designed boreholes. Fiber optic gyroscope (FOG) inertial navigation system (INS) is a popular navigation method used in inclinometer because of its high accuracy and strong adaptability to environment. Because the angles of coordinate axis between carrier system and navigation system is uncertain, INS is unable to track the trajectory immediately when inclinometer before alignment. Coarse alignment is the first step before navigating to calculate the angular relation between carrier system and navigation system, which determines the initial attitudes of the inclinometer.
Analytical alignment and inertial frame alignment are two main methods of coarse alignment. In analytical alignment, INS calculates the initial attitude through smoothing the output of FOG and accelerometer, which can reduce the impact of drift errors of FOG and accelerometer. However, FOG and accelerometer is sensible to vibration, which leads the error of initial attitude increase when carrier in a vibration environment. Therefore, in order to address the problem of the initial attitude error in vibration environment, inertial frame alignment is proposed. Through inducing inertial frame as a reference to carrier-navigation system, the adaptability to angular vibration environment of alignment is enhanced. In contrast to analytical method, the output of FOG and accelerometer are used to calculate the attitude, where the drift error impacts the accuracy of alignment directly. Thus, in order to improves the performance of inclinometer, alignment method in vibration environment becomes a hot issue. Gao et al. proposed an alignment algorithm which based on a third-order leveling loop. 1 The projection of the gravitational vector is smoothed through weighted average algorithm, so that the fast alignment based on inertial frame is completed. This method reduces the alignment time and improves the accuracy of alignment. However, the complex environmental impact on INS is rarely discussed. Liu et al. proposed a fast alignment technology based on two-position analytic method to address the environment issue to optimize the environment adaptability. 2 Through updating attitude transformation matrix and a dynamic error compensation algorithm, the error of alignment is obviously restrained when carrier is in oscillating state. Kalman filter is the popular method the address alignment issues.3–5 Kalman filter, a strategy of optimal estimation, is an excellent method in alignment, which has advantage on accuracy and environment adaptability.6,7 However, comparing to geometrical alignment strategies like analytical alignment and inertial frame alignment, alignment time is longer when applying Kalman filter.
This paper focuses on the linear vibration on alignment of INS inclinometer. Because INS inclinometer is strapped on drill pipe, machine vibration is the main factor influences the performance of INS, which may degrade the accuracy of the alignment.8,9 Previous engineering cases of INS inclinometer shows the machine vibration of drill machine contains both angular vibration and line vibration. Inertial frame alignment can reduce the impact of strong angular vibration on coarse alignment effectively. Therefore, strong linear vibration is the main factor influencing the alignment in coal inclinometer. Inspired by the ideology of filter, empirical mode decomposition (EMD) filter is a popular method addressing the vibration issue in sensors.10–13 Moreover, an endpoint prediction strategy is proposed to solve the endpoint error to improve the performance of EMD filter. The main contributions of this paper are summarized as follows:
Based on the analysis of inertial alignment on an oscillatory base, vibration effect on accelerometer is the main error that causes alignment error. Therefore, solving the vibration effect on accelerometer is vital to improve the alignment performance of INS inclinometer.
An improved EMD filter is proposed to suppress the vibration error on accelerometer. Meanwhile, the improved EMD filter reduce the endpoint error through predicting the extreme point.
Vibration experiment of INS inclinometer is conducted in laboratory to verify the efficiency of the proposed alignment method. Furthermore, the proposed alignment method is also applied in a drilling rig and the result indicates that the proposed alignment method shows an excellent performance.
Considering the analysis of the relevant literature, few studies improve the EMD filter to meet the demand of inertial alignment. In this paper, an inertial alignment with improved EMD filter is proposed to address the vibration effect on accelerometer in alignment. The rest of this paper is organized as follows: In section 2, basing on the working condition, INS inclinometer is installed on an oscillatory base where vibration is the main error source affects the performance of the INS. Therefore, inertial alignment framework which has a good performance of resisting vibration is analyzed in detail. The vibration on accelerometer is still a severe problem compromising the accuracy of inertial alignment of INS inclinometer. In section 3, an improved EMD filter is proposed to suppress the vibration error of accelerometer. Meanwhile, the proposed EMD filter addresses the endpoint error of EMD to reduce the accumulate error when rebuilding the signal. Furthermore, in section 4, a laboratory experiment and a practical experiment are conducted to prove the efficiency of the proposed alignment method. In section 5, the summary of this paper is concluded.
Error analysis of inertial frame alignment
There are four coordinate frames are used in inertial frame alignment, and they are defined as follow.14,15
The
The
The
The
The initial alignment attitude matrix can be expressed as below.




Through the integration of acceleration output, the periodic disturbing acceleration caused by minor vibration will be eliminated. Therefore, basing the equations (2)–(6), initial alignment attitude matrix can be calculated.
In order to analyze the error influence on the alignment, take differential at both ends of equation (1).

Equation (7) shows the error of attitude
The attitude error
Misalignment angles




Basing on equations (1), (9)–(11),
Because


According to equations (12)–(14) and neglecting the second order terms,
Comparing equations (8) and (15),

Basing the analysis above, error term
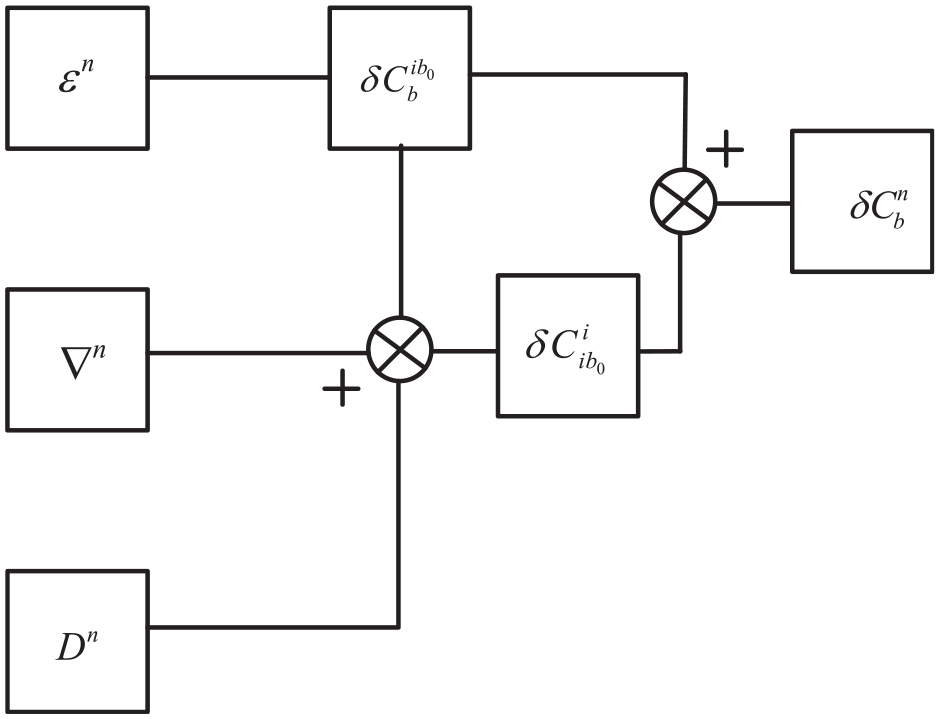
Error propagation path of coarse alignment.
In environment with relative weak angular vibration, alignment error provoked by FOG can be expressed as below.
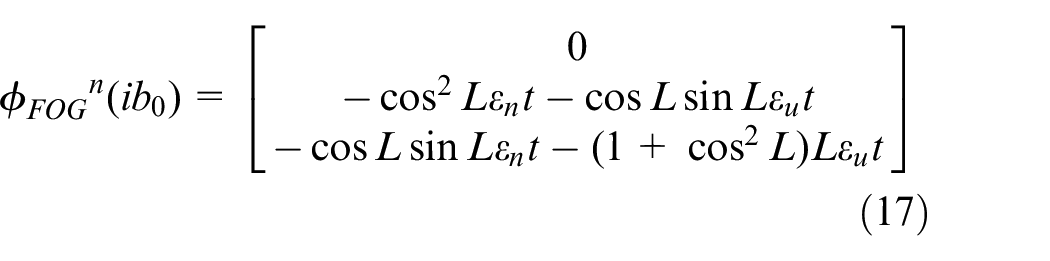

The magnitude of
Attitude error

The accelerometer used in inclinometer is medium precision (100 μg). Basing on the equation (19), the magnitude of error caused by drift error of accelerometer is about 0.006°, which can be also neglected in application.
Attitude error
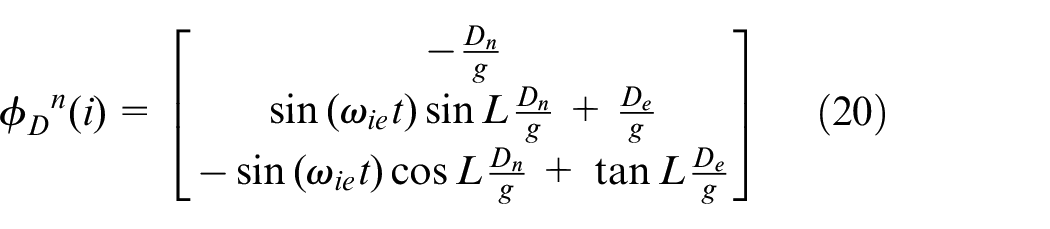
Equation (20) shows the disturbing vibration will introduce large coarse alignment error without suitable damping filter. For example, when the linear vibration is 0.1g in carrier frame, basing on equation (20), attitude error of alignment is about 5.7°. Especially, when the amplitude of vibration is large, inertial frame alignment methods fails to calculate the attitude of INS.
In this section, the alignment error of medium performance INS (FOG 0.01°/h, accelerometer 100 μg) has been analyzed. The alignment error caused by drift of FOG is 0.05°, and the alignment error caused by the drift of accelerometer is 0.006°. Alignment error induced by the drift of the FOG or the accelerometer is relatively small. Alignment error caused by angular vibration can be suppressed by inertial frame alignment. However, linear vibration mainly introduce error to the accelerometer. Therefore, addressing the strong linear vibration issue in alignment is very important.
The improved EMD filter applied in alignment
In order to reduce linear vibration in accelerometer, the improved EMD filter is applied. The severe error exists in traditional EMD.17,18 When connecting the extreme points to obtain the envelope in EMD, envelope may not contain the exactly the extreme points. Therefore, when using the cubic spline curve to connect the extreme points to obtain the upper and lower envelopes, the upper and lower envelopes at the endpoints may diverge, which causes large fitting error.
19
The fitting error will accumulate when continuously recompositing.
20

The first IMF

In order to separate the lower frequency part of
The original output of accelerometer can be defined as

However, during the decomposition, the envelope obtained by connecting extreme points usually is not the exact the extreme point. So the upper and lower envelope at the end point will diverge which will introduce large fitting error into decomposition. With the IMF decomposition, the error will accumulate.
A prediction strategy of extreme endpoints based on relativity of extreme points is proposed.
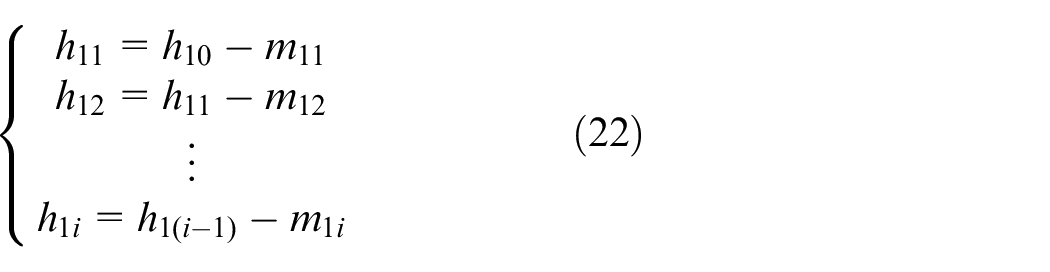
(1). Calculate each maximum

(2). Calculate the left monotonicity of the rightmost extreme point and compare with the left monotonicity of each point in error set. If the monotonicity is the different, delete corresponding points.
(3). Using the rest m maximum points forms the equations.

The next maximum point of rightmost point

Basing on the same strategy,
Figure 2 indicates that the envelope represented by black dotted line cannot include the leftmost minimum point. And the improved algorithm can form more precise upper and lower envelope which demonstrates by yellow line to reduce the fitting error.
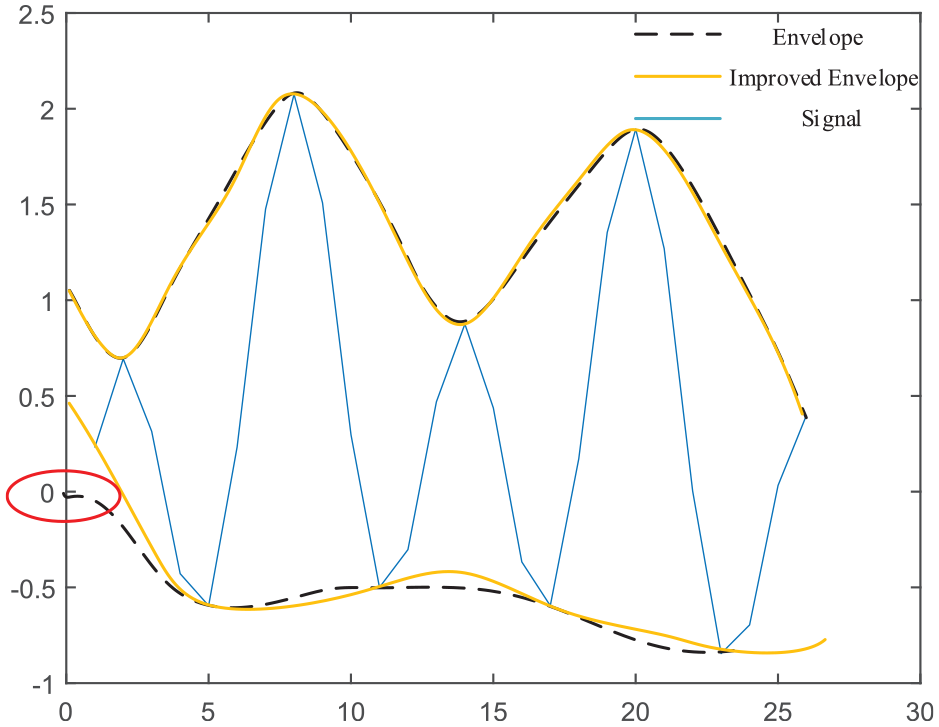
Envelope applied with proposed algorithm. The blue solid line is the signal; black dotted line is envelope and yellow solid line is the envelope used the improved strategy.
Experiment and verification
In order to evaluate the performance of the proposed alignment method basing on improved EMD filter before used in practice, the alignment experiment in vibration environment is conducted. The INS inclinometer FIW-04 manufactured by Beihang University (Beijing, China) is assembled on the fixture and the whole equipment is strapped on a vibro-bench. The fixture assures that the inclination angle of INS inclinometer is 1.5°. The range of amplitude is from 0 to 10g and the range of frequency is from 0 to 3000 Hz. The test equipment is shown below (Figure 3).
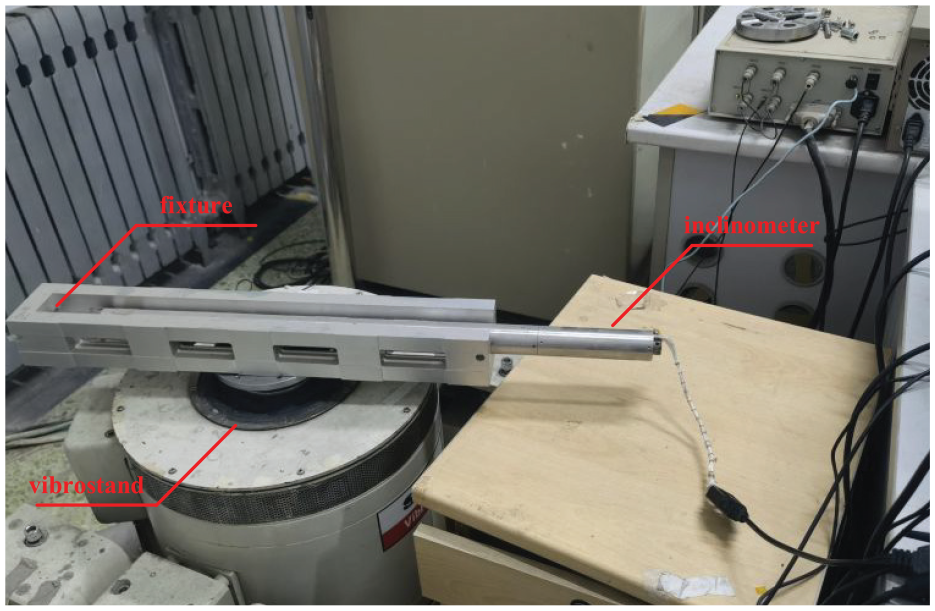
The equipment of the laboratory experiment. INS inclinometer is assembled on the fixture. The fixture is strapped on the vibro-bench.
INS inclinometer is usually strapped on the drill pipe. When drilling rig starts, inclinometer is in strong vibration environment which concludes whit-noise vibration and abnormal noise caused by electromagnetic interference. In order to simulate the working condition, the vibration spectrum is set as shown in Figure 4. The frequency of vibration is from 5 to 500 Hz, and an abnormal vibration is from 110 to 120 Hz.
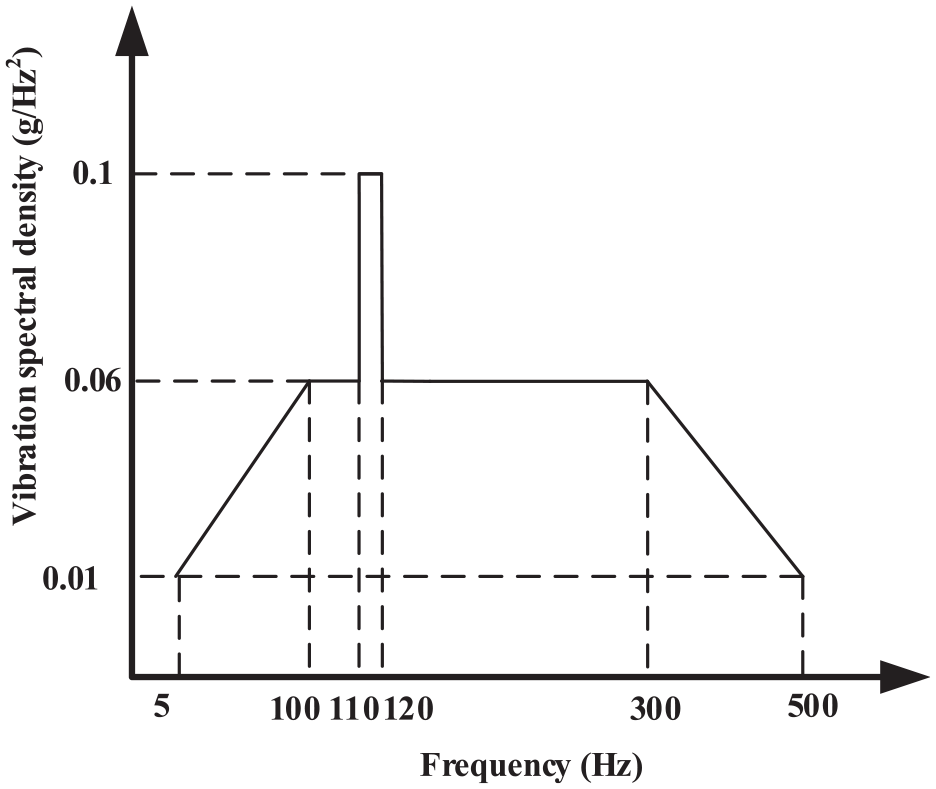
Vibration spectral density of vibro-bench. The vibro-bench is set to random-vibrate mode. The abnormal vibration is to simulate the disturbing error in drilling rig.
The outputs of three accelerometers are shown in Figure 5. The abnormal noise shown in Figure 5 is caused by vibration whose frequency is from 110 to 120 Hz.
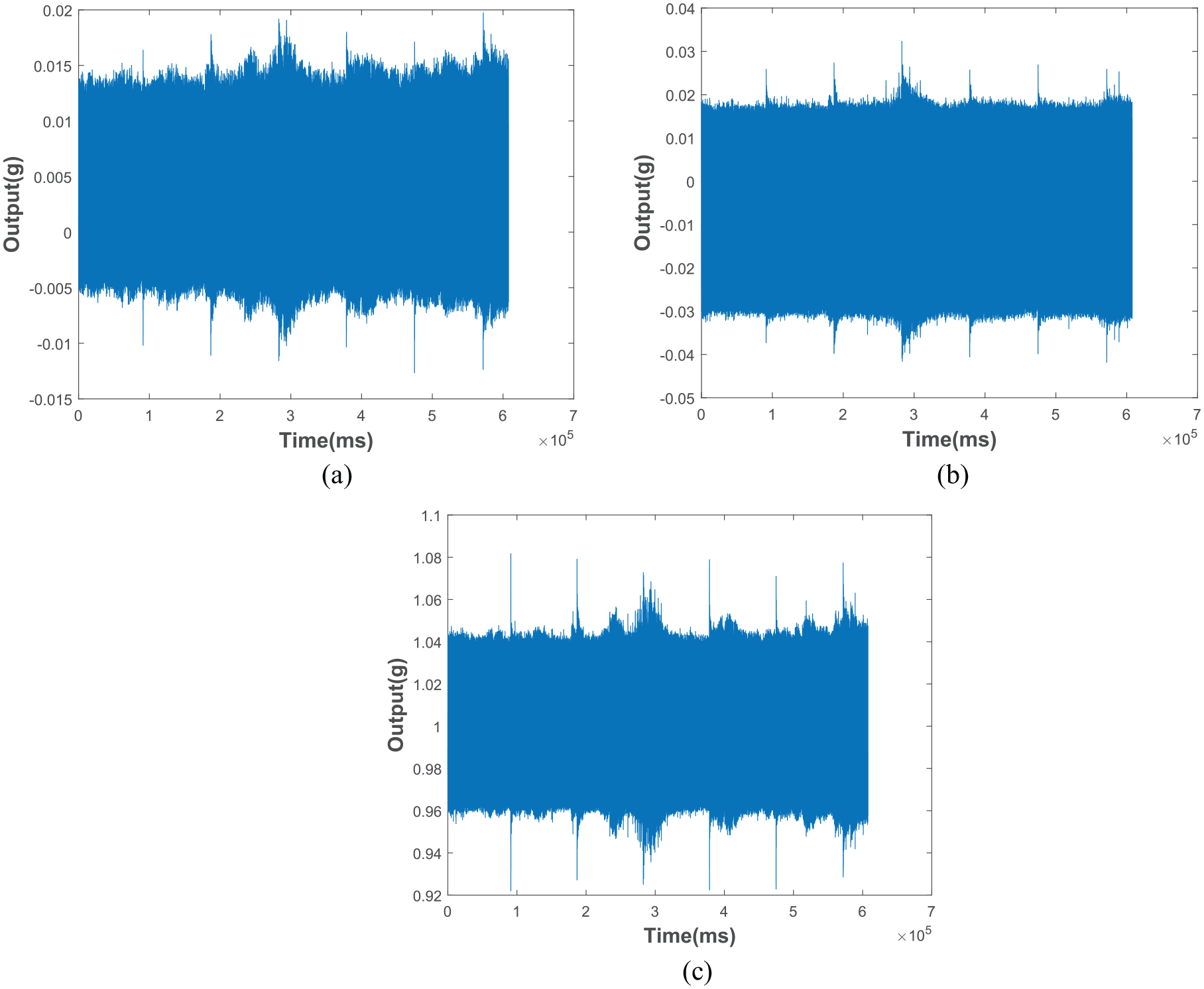
Outputs of three accelerometers of INS inclinometer. The abnormal parts of the three outputs are caused by disturbing error which will degrade the performance of the alignment. (a) output of x-axis accelerometer, (b) output of y-axis accelerometer, and (c) output of z-axis accelerometer.
The proposed improved EMD algorithm and pure EMD filter are applied in three accelerometers. Only the result of x-axis accelerometer is shown in Figure 6. The other two axis accelerometers demonstrate the similar performance.
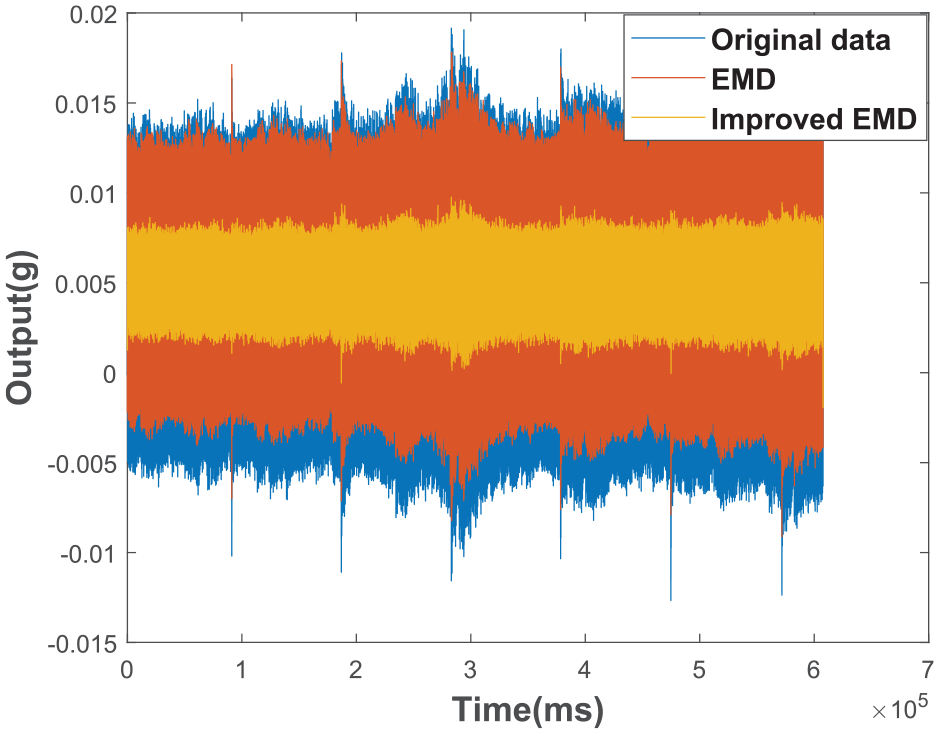
The comparison of EMD and proposed EMD filter in x-axis accelerometer.
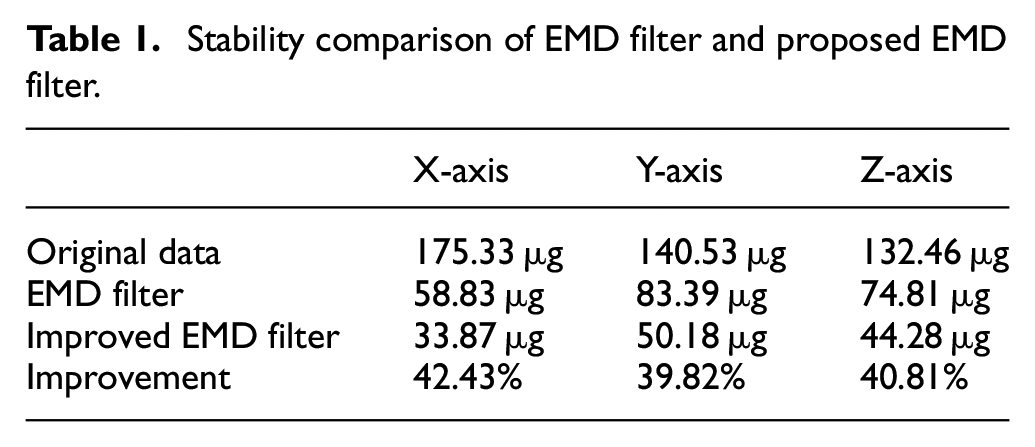
Figure 6 indicates that the proposed EMD filter can efficiently suppress the vibration effect on x-axis accelerometer comparing to the original output of accelerometer. The stabilities of three accelerometers using proposed EMD filter are shown in Table 1.

Stability comparison of EMD filter and proposed EMD filter.
The alignment results of the laboratory experiment are shown in Figure 7.
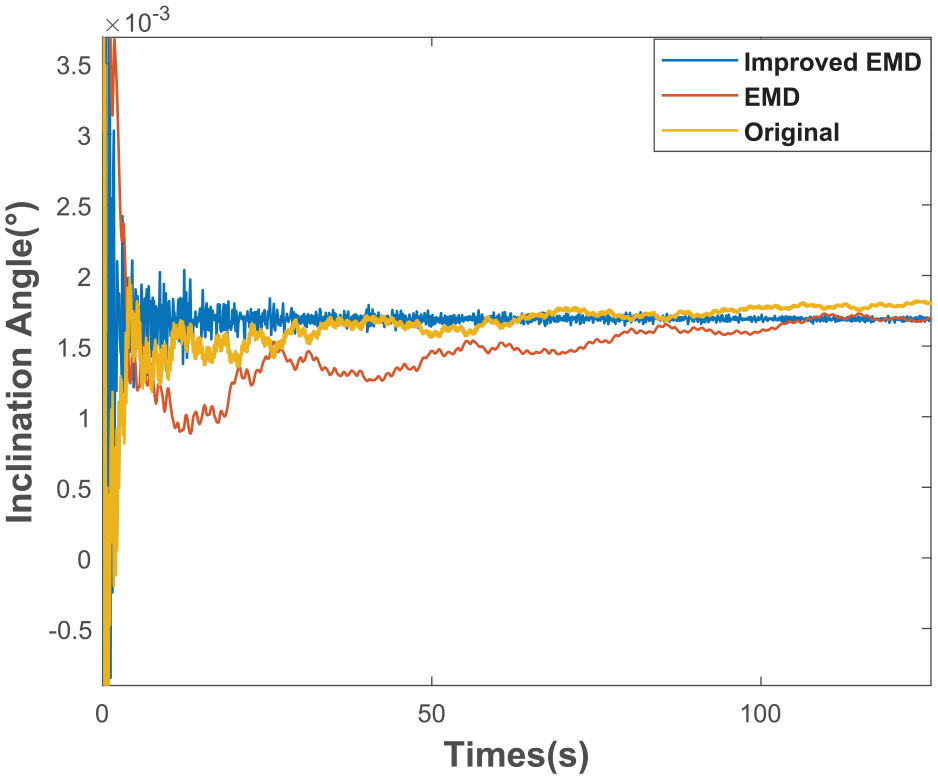
Alignment results of laboratory experiment.
The result of laboratory experiment shows inertial alignment method without any filter cannot impress the alignment error effectively. Inertial alignment with EMD filter can slightly improve the performance of alignment. The result of alignment converges faster comparing to pure inertial alignment. However, the drift of the alignment continues to about 300 s which is caused by vibration. The alignment result shows that improved EMD filter applied in inertial alignment can resist the impact of the vibration efficiently, and alignment time is about 100 s. The alignment error of inclination angle is about 5.4′.
The inertial alignment method with improved EMD filter is applied in coal drilling rig in Delong coal mine, Ordos, Inner Mongolia, China in October, 23th, 2021. The coal drilling rig is ZDY6500LQ produced by Xi’an Research Institute Co. Ltd., China Coal Technology and Engineering Group Corp. The INS inclinometer is installed inside the drill pipe. The equipment is shown in Figure 8.

Coal drilling rig with INS inclinometer.
The original output of INS inclinometer is processed offline. The proposed EMD filter and pure EMD filter are applied in output of accelerometer respectively. The alignment result of drilling pipe is shown below (Figure 9).
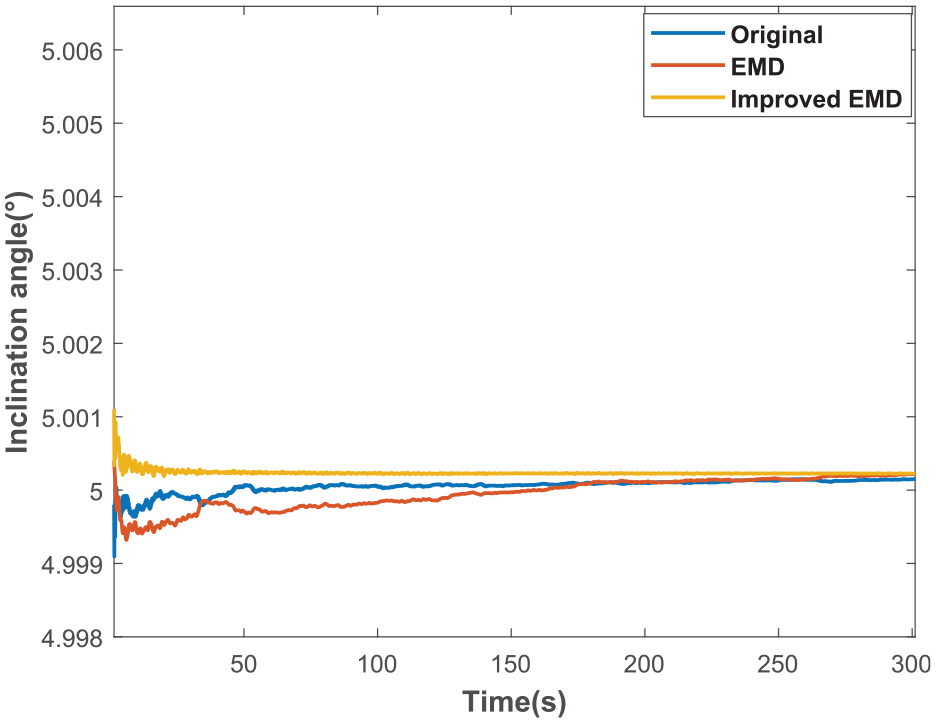
Alignment result of INS inclinometer in coal drilling rig.
The result indicates that the attitude angles of three methods are approximate when alignment results converge. However, both pure inertial alignment and inertial alignment with EMD filter take about 300 s to finish alignment. Inertial alignment with improved EMD filter only takes about 50 s.
Discussion
In this paper, the effect of vibration on alignment in INS inclinometer is detailed analyzed. Alignment error caused by vibration on gyroscope can be well restrained by inertial frame alignment method. However, vibration on accelerometer degrades the performance of alignment severely, which cannot be solved through inertial frame alignment. EMD filter is popular method reducing the vibration effect on alignment. Nevertheless, previous research shows that alignment with pure EMD filter cannot meet the request of alignment. Therefore, further research of EMD filter applied in alignment is vital to improve the alignment performance in INS inclinometer.
Basing on the analysis above, inertial alignment with improved EMD filter is proposed. Through the analysis about the error of inertial alignment, a conclusion that vibration on accelerometer is the main error of alignment in INS inclinometer is drawn. EMD filter is a popular method dealing with errors caused by vibration in inertial sensors. However, endpoint error in EMD will causes cumulative error which may degrade the performance of the alignment. The results of laboratory experiment shows that the stability of accelerometer applied improved EMD filter improves 42.43%, and the alignment time is shortened significant from over 300 to 50 s and the alignment error of inclination angle is less than 5.4 arcmin. The alignment performance also benefits from proposed EMD filter applied in coal drilling rig. The alignment time reduces from 300 s to about 50 s without compromising the alignment accuracy. In conclusion, the result of vibration experiment in laboratory indicates the proposed inertial alignment can reduce the alignment time without compromising the alignment accuracy, and the result is also proved in coal drilling rig.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.