
Abstract
This paper proposes an adaptive fuzzy control method with prescribed performance for Waverider Vehicles (WVs), being able to guarantee finite-time convergence and small overshoot for tracking errors. Firstly, we design a new type of performance function that is independent of the initial error, and possess finite-time convergence and small overshoot. Then, we transform the inequality constraints on tracking errors into an unconstrained equation by introducing a transformed error. On this basis, we design a prescribed performance control (PPC) approach to limit the tracking errors within prescribed funnels utilizing the transformed error and fuzzy approximation, which ensures that satisfactory transient performance and steady-state accuracy can be guaranteed for tracking errors. Compared with the existing PPC, the improvement is to assure finite-time convergence of tracking errors with almost zero overshoot. Finally, compared simulations are given to verify the advantage.
Keywords
Introduction
Waverider Vehicles (WVs) have been the primary development direction for countries around the world because of their advantages of cost-effectiveness such as fast response time, high mobility, long range, and strong penetration ability.1–6
The control system is the core of WVs, enabling they to execute and complete flight missions safely and efficiently. Many scholars and scientific research institutions have developed researches in this field. The motion model established for WVs has a lot of nonlinearity and uncertainty because the configuration of WVs is particularly complicated, and there are many unknown factors in the flight environment. Simultaneously, WVs’ high velocity flight also puts forward extremely requirements on the transient performance of the control system. Therefore, the robustness and transient performance of the control system have also been the focus of attention. Sun et al. 7 proposed a control method with prescribed performance for WVs by designing a new prescribed function, while the dependence of the control law on the initial error value was eliminated. Further, the new prescribed function proposed in Bu and Qi 8 was extended to the control problem with unknown direction, and the Nussbaum function was used to estimate the control gain whose sign is unknown. This ensures the satisfactory transient performance and steady-state accuracy of the velocity tracking error and altitude tracking error of the WVs. In order to achieve faster error convergence, some scholars have carried out research on PPC with finite-time convergence. The main idea is to design a piecewise function that meets prescribed performance conditions to achieve finite-time convergence. However, there is still the problem of uncontrollable overshoot. For this reason, the small overshoot PPC was studied in Xiang and Liu, 9 and the convergence of small overshoot or even zero overshoot of the WV tracking error was realized. Besides, to ensure the real-time performance of the control system, scholars mainly carry out work from two aspects: (1) reduce the structural complexity, (2) reduce the amount of online learning. Zheng et al. 10 designed an inversion control law based on finite-time convergent differentiators, which estimated the derivatives of the virtual control inputs. Zheng and Xie 11 exploited the Multi-Layer Perception method, and as a result, only one parameter was needed to be adaptively regulated, which reduces the learning amount of the neural network and ensures the good real-time performance of the controller.
Though the above methods are able to ensure the robustness and transient performance indicators for the control system, there still exist some challenging problems such as relying on the initial value of the tracking error, longer convergence time, and large overshoot. To overcome those shortcomings, this paper exploits a new PPC method for WVs to guarantee the tracking errors with satisfactory prescribed performance. The main contributions are summarized as:
Different from the existing studies, the proposed new performance functions are able to guarantee the velocity tracking error and the altitude tracking error with finite-time prescribed performance with almost zero overshoot.
A low-complexity control structure is obtained since the complex design procedure of back-stepping is avoided. Moreover, the computational burden is reduced by introducing an improved fuzzy approximation with less online learning parameters.
WV model and preliminaries
WV model
We consider the following integrated analytical two-dimensional model that describes the longitudinal motion of WVs. 12





with
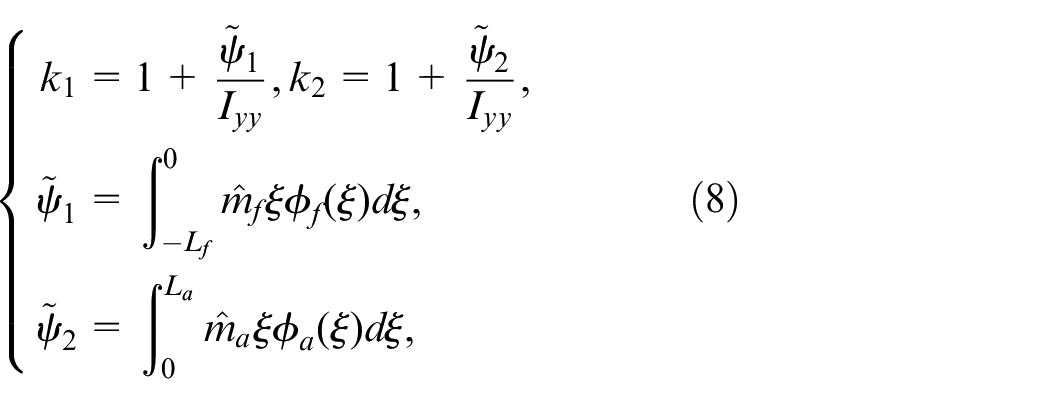
where
In (1)−(7), the parameter fitting forms of aerodynamic force and moment are
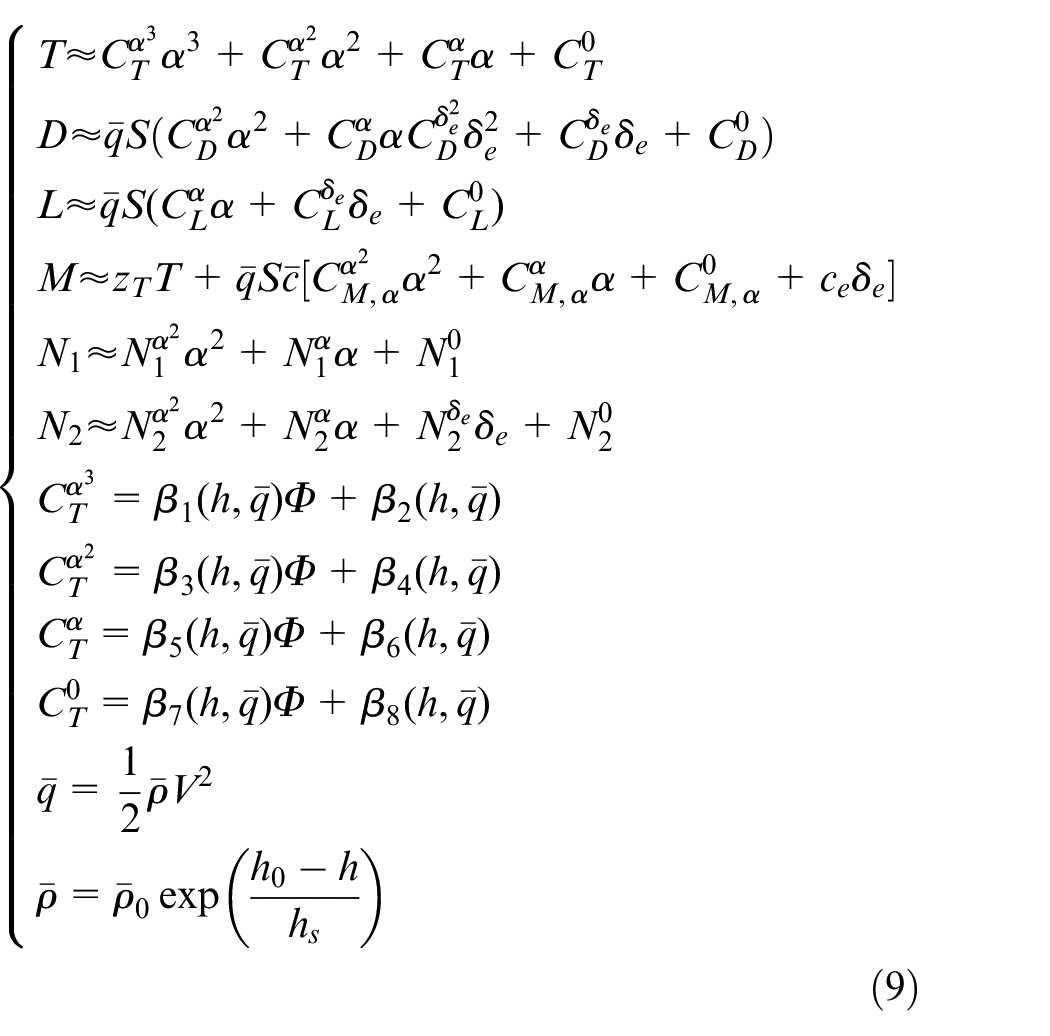
The above motion model contains five rigid body states (
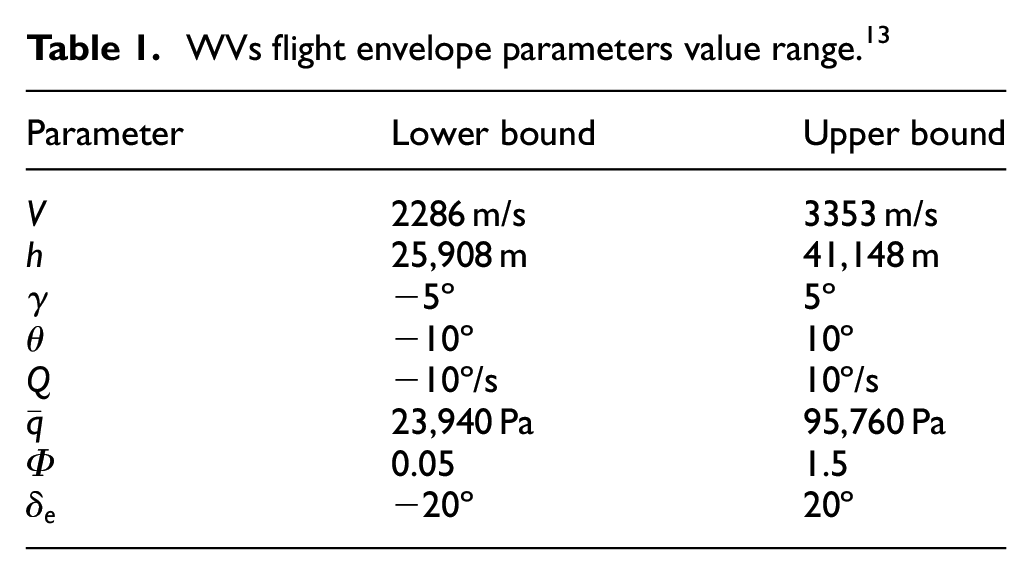
WVs require the controller to realize the robust tracking of the velocity
WVs flight envelope parameters value range. 13
Preliminaries

where


with
It is proved that the fuzzy system can be used to approximate the continuous function
IF
THEN
Then, the output of the fuzzy system is
where
Define


Then we have


New prescribed performance function design
We define the following improved prescribed performance

The new performance functions
where

with
The function
The defined prescribed performance (17) is shown in Figure 1.
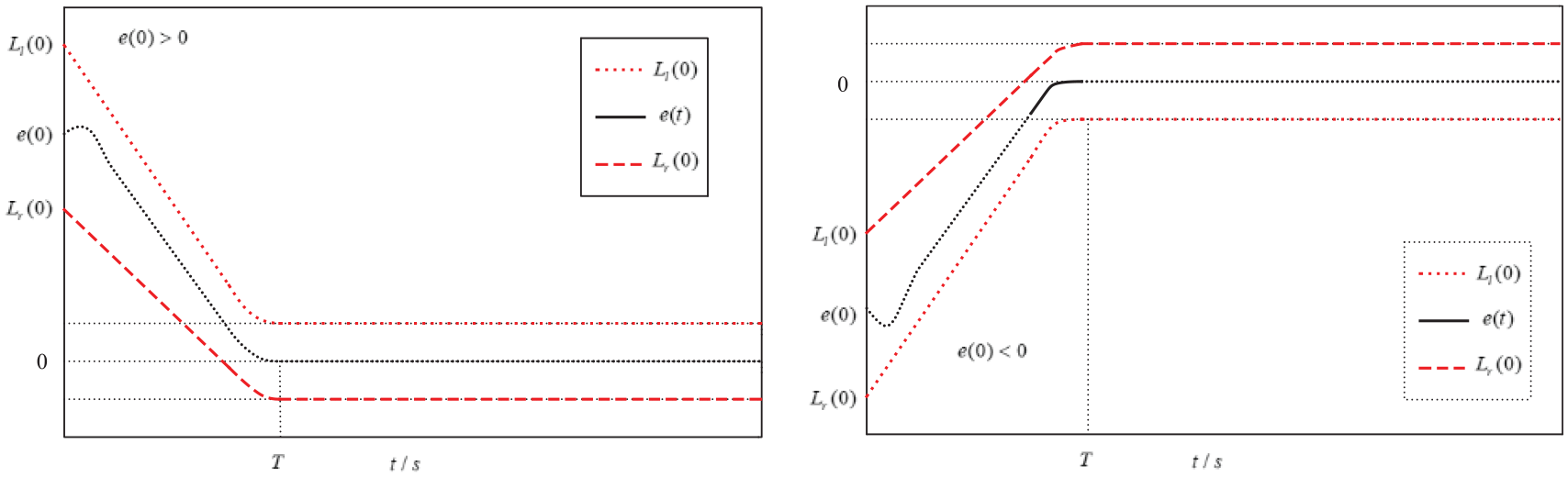
Schematic diagram of prescribed performance defined by equation (17).
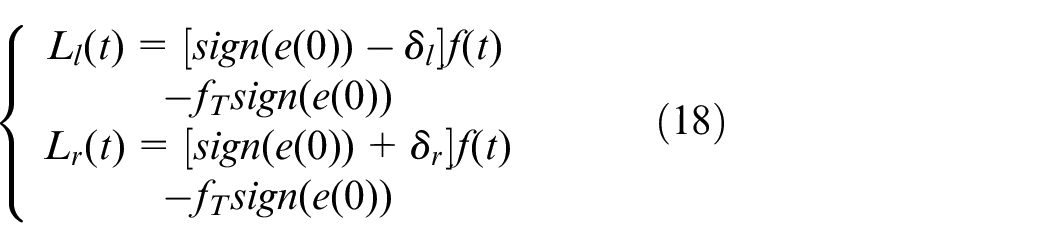
By the equation (17), the equation (18), and the introduction of symbol
We define the transformed error as

with
Then, we get the following theorem:
Define the steady state error

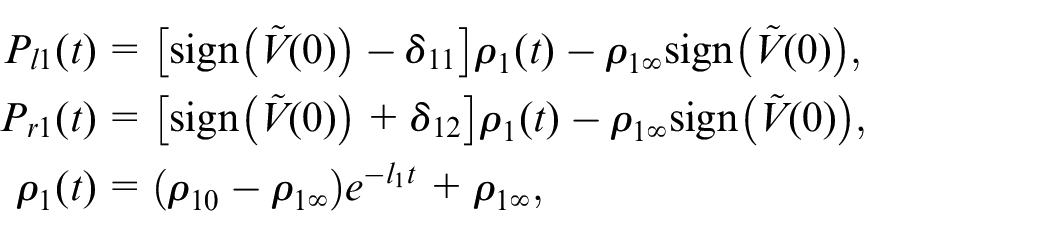
Define the prescribed performance as:

where
When

Therefore,
Figure 1 shows the prescribed performance defined by equation (17).
Controller design and stability analysis
Velocity control law design
Define velocity tracking error as

Using (8), we get

A transformed error

where

with
Using (26), we get
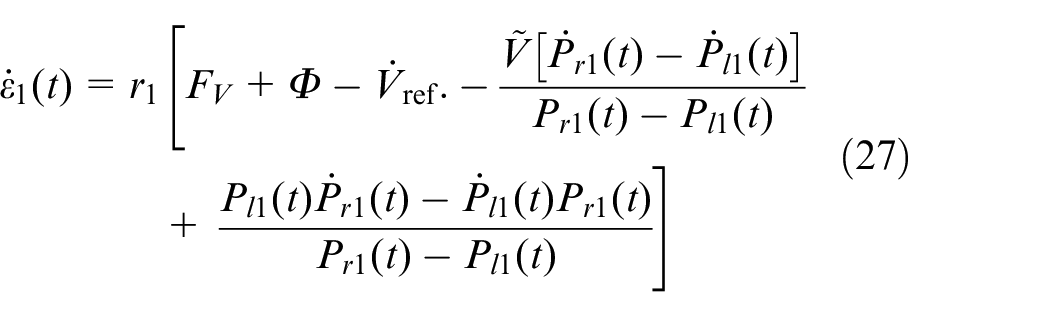
with




During the flight of WVs, by considering the problems of parameter perturbation, input limitation and external disturbance, an adaptive control law is introduced to ensure the robustness of the system.
The velocity controller
where

with

Substituting (16) and (28) into (27), we have
Define

Utilizing (29)−(31), we get
Since
Note that

Thereby, (34) becomes

Let


It is obvious that
Altitude control law design and stability analysis
The control goal for the altitude subsystem (equations (2)–(5)) is to design a prescribed performance control law
Define the altitude error as

Select the track angle reference input as

with
Define the transformed error

where




with
Take the track angle reference input as
with



If
Next, we will design a low-calculation fuzzy control law, so that
Define

where
We give the following reasonable assumption.
where
In order to avoid the complicated design process of backstepping control, the model (40) is equivalently transformed as follows.
After the above model transformation, equation (40) becomes the following non-affine pure feedback model
where
Define track angle tracking error
with
The first third derivative of
where
The first derivative of
According to Lemma 2 and Assumption 1, we know that

According to Lemma 3, we get

with
According to (49) and (50), we have

For the unknown term

where
Define
where

with

with
Take the time derivative of equation (55) to get

Substitute equations (51), (52) and (54) into equation (56) to get
with
Considering equation (53) and
Add and subtract
From fact that

According to Lemma 4, we get
Let

with
Multiply
Integrating equation (62) on
According to Lemma 1, we know that
Simulation analysis
In this section, a numerical simulation is given to test the effectiveness of the control. The membership function of the fuzzy system is selected as















Take the performance function as


The design parameters are taken as:

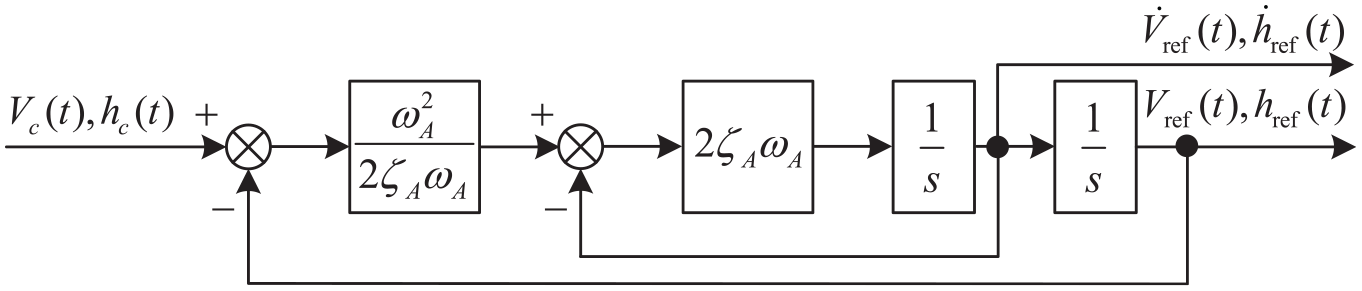
Second-order reference model structure diagram.
where
Scenario 1: Take
Scenario 2: Take
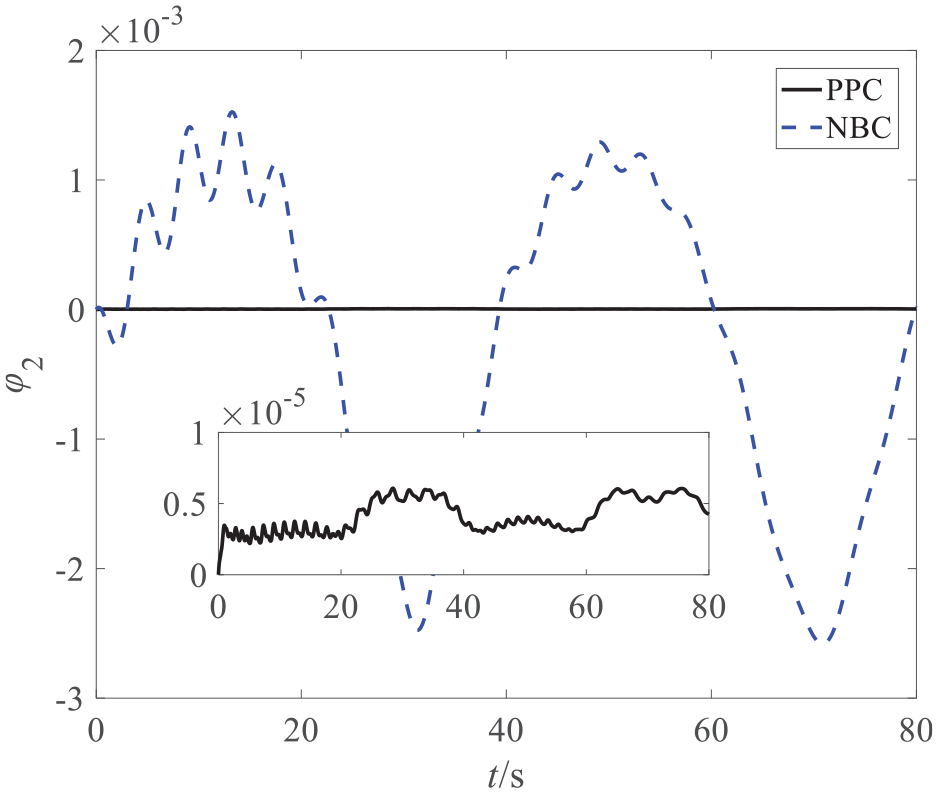
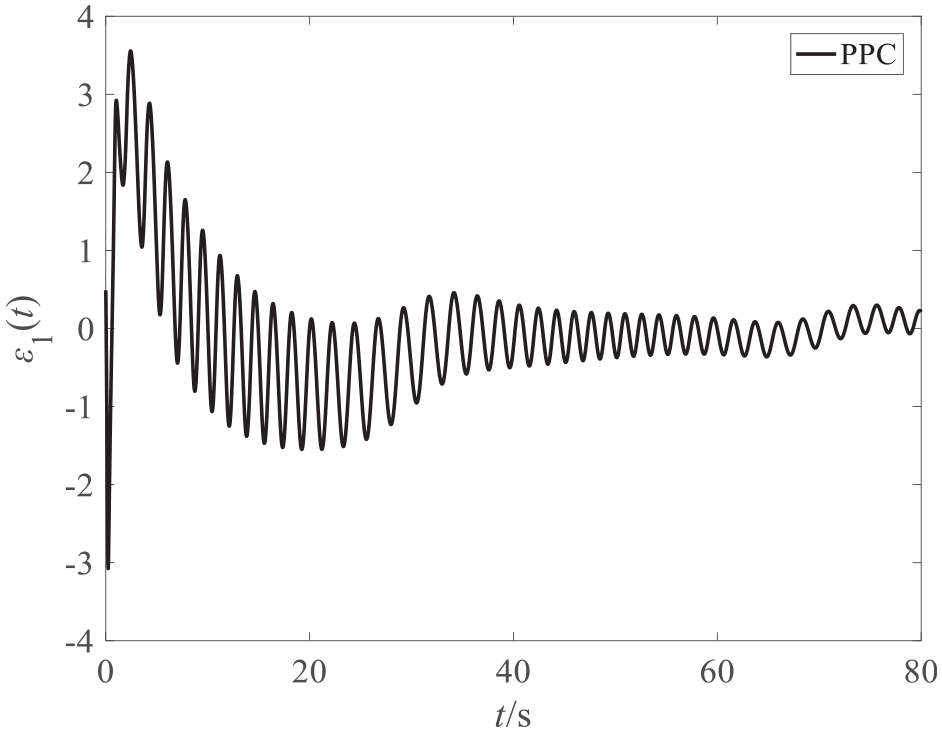
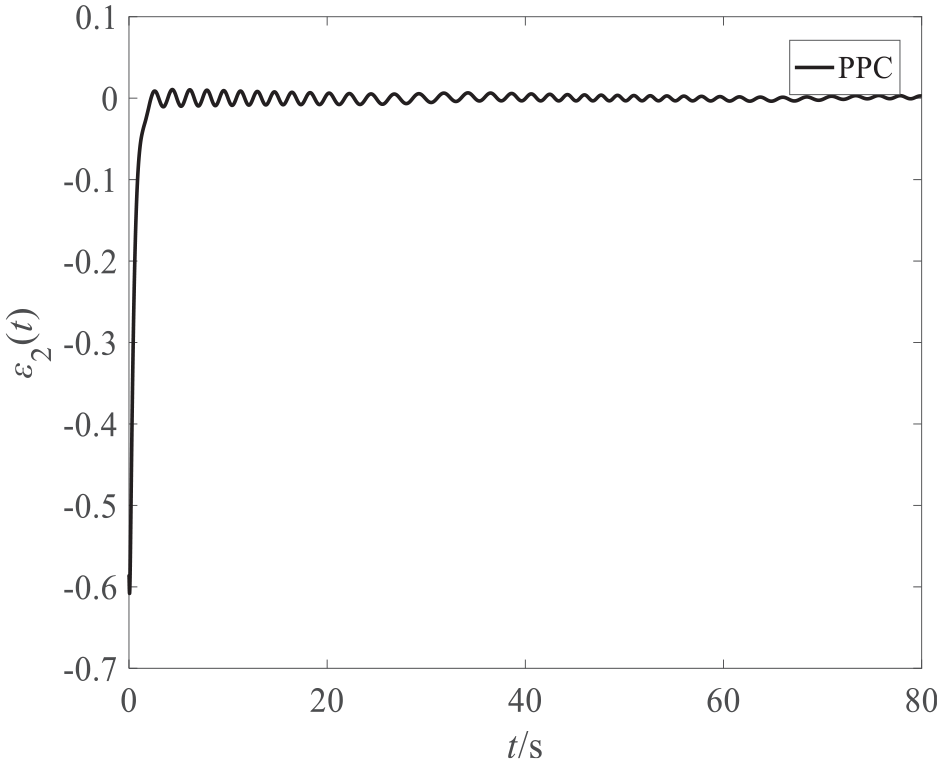
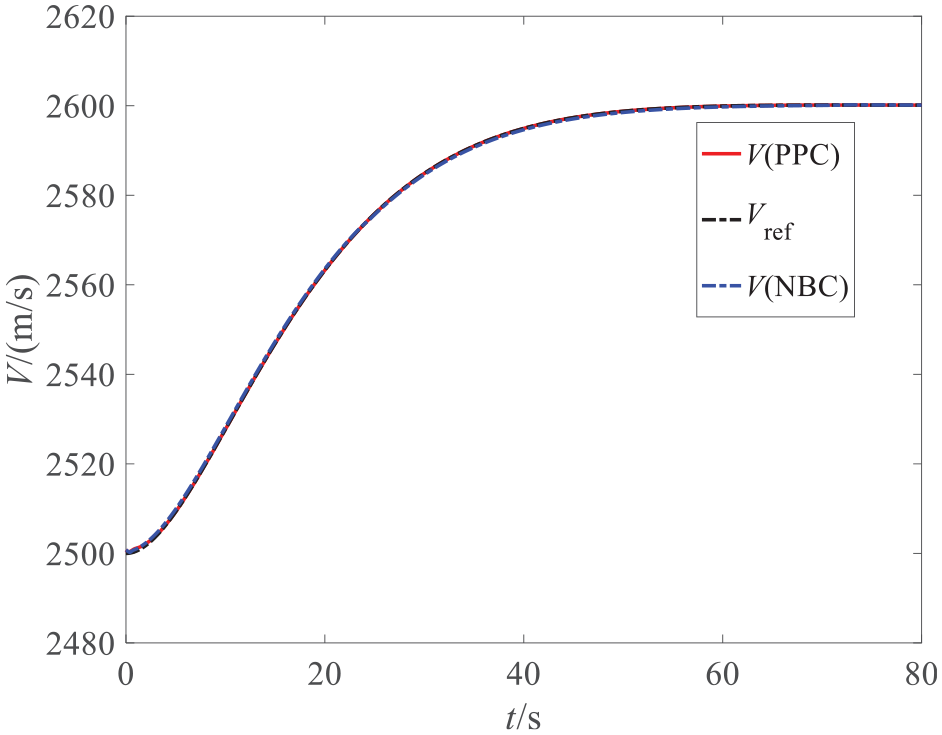
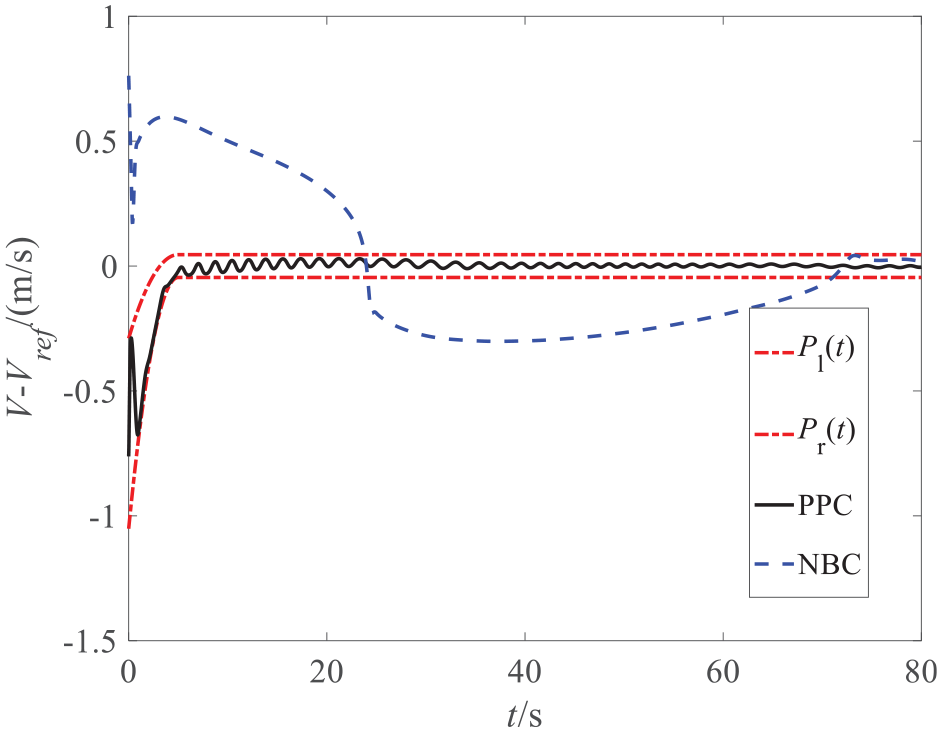
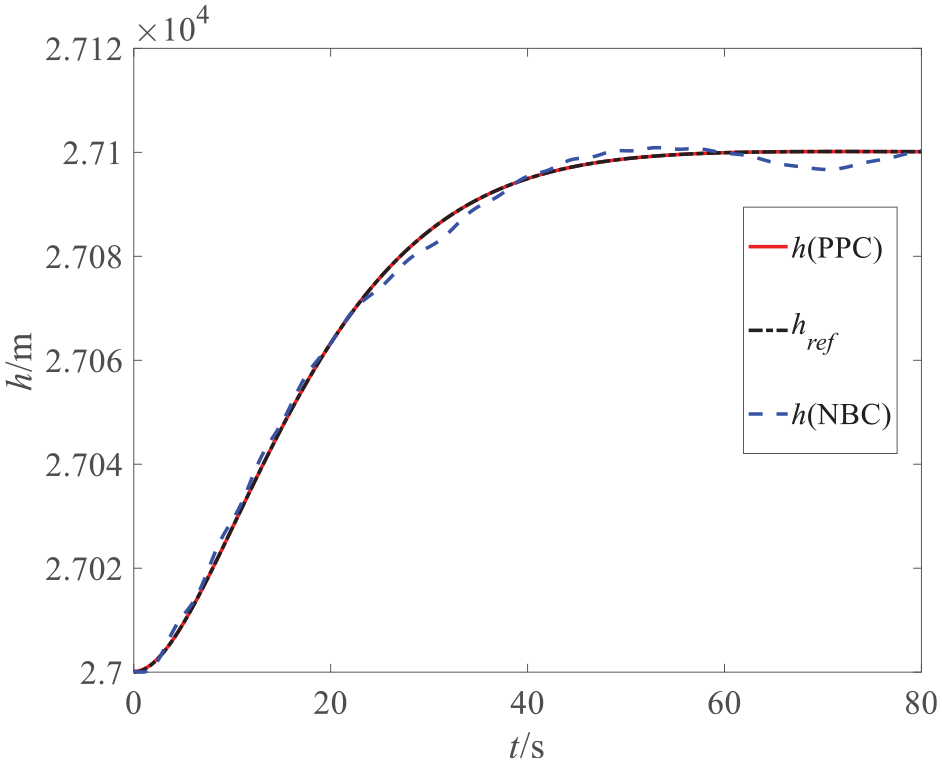
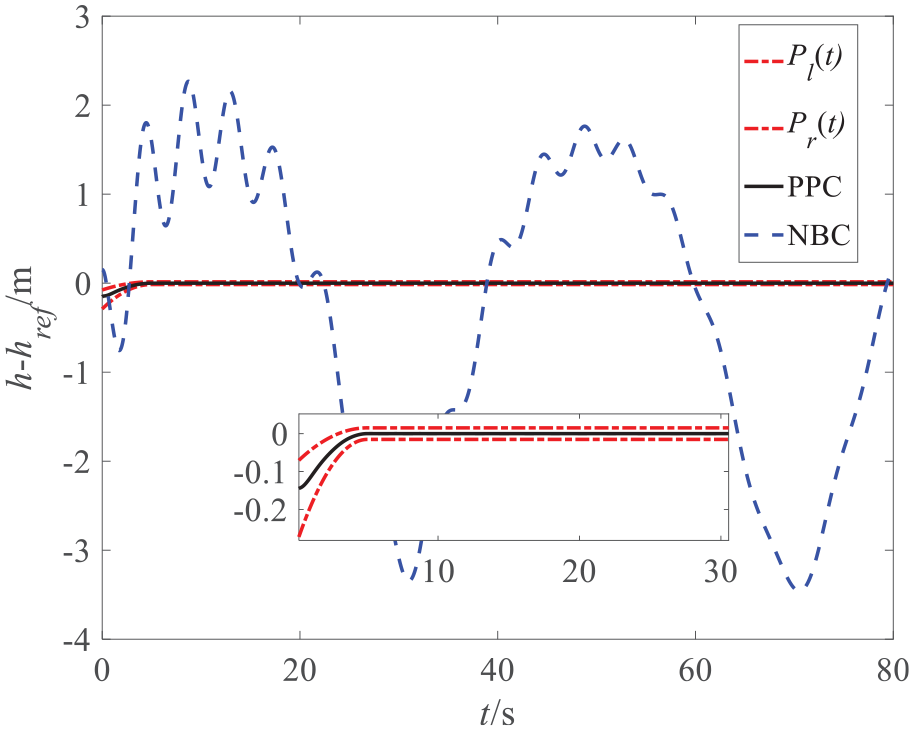
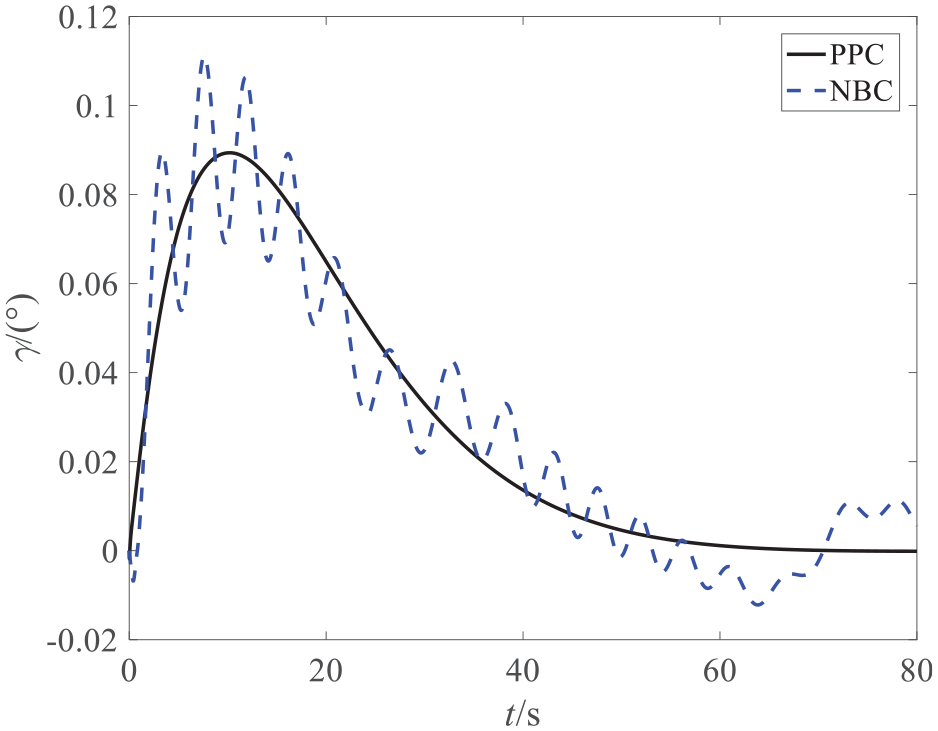
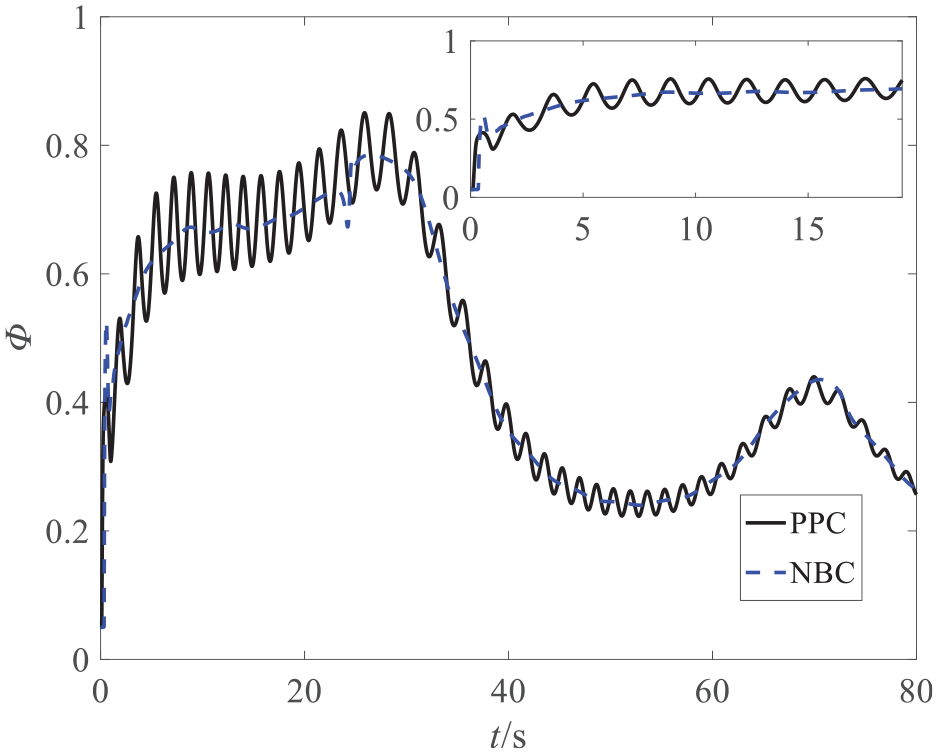
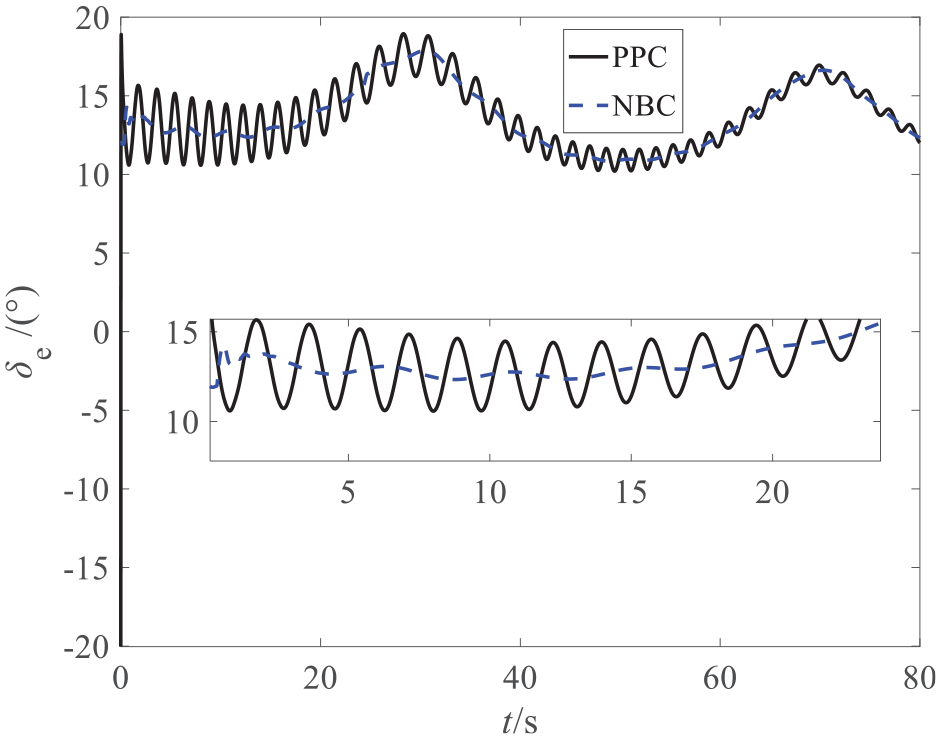
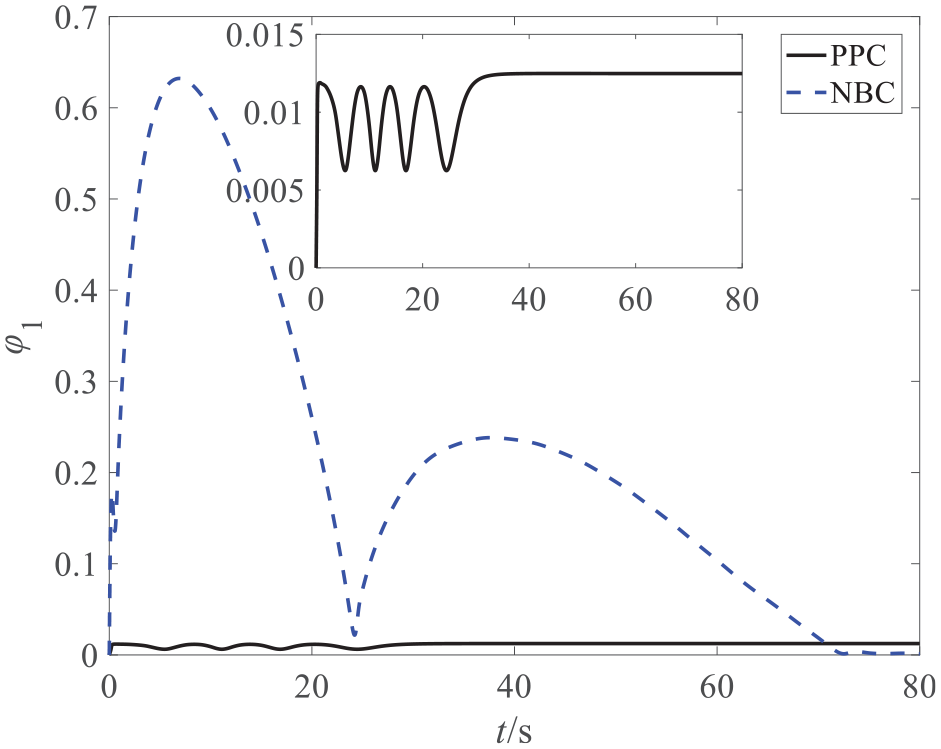
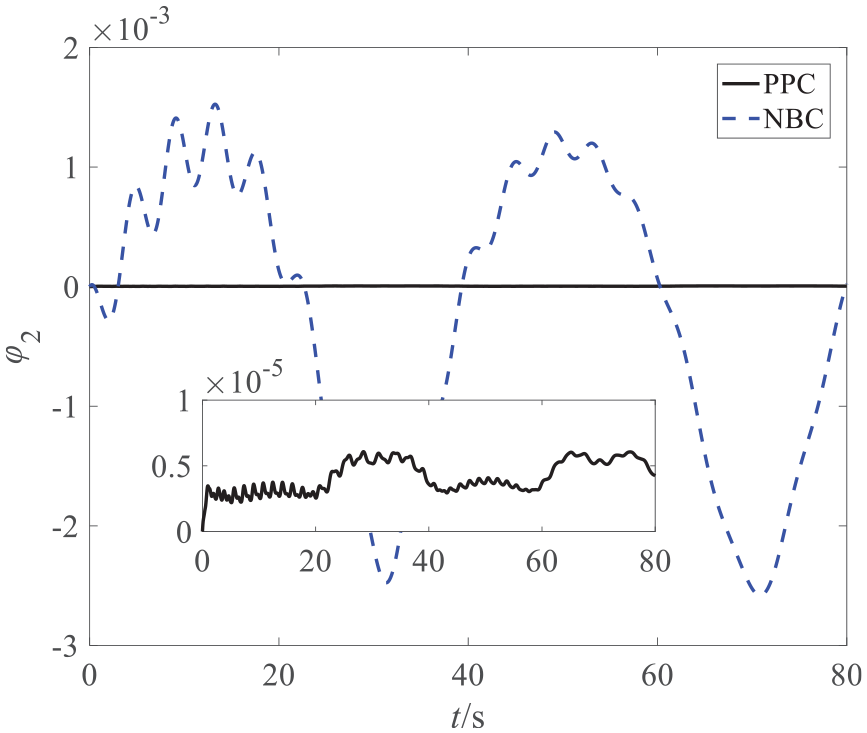
The simulation results of scenario 1 are presented in Figures 3 to 17. It can be seen from Figures 3 to 6 that when the model parameters are perturbed, the PPC method in this paper can ensure that the velocity tracking error and altitude tracking error have better transient performance and better steady-state accuracy, and also achieve the velocity tracking error and the altitude tracking error with small overshoot finite-time convergence. Although the velocity tracking error fluctuates greatly in the first 5 s, it does not exceed the designed envelope, so the phenomenon of control failure will not occur. In addition, the prescribed performance function designed in this paper can adjust the convergence time. If the convergence time is increased, the fluctuation will not occur. The situation will improve. Figures 7 to 13 show that the attitude angle, flexible states and control inputs of the two control methods are relatively smooth, and there is no high-frequency chattering phenomenon. Figures 14 and 15 show the learning effects of
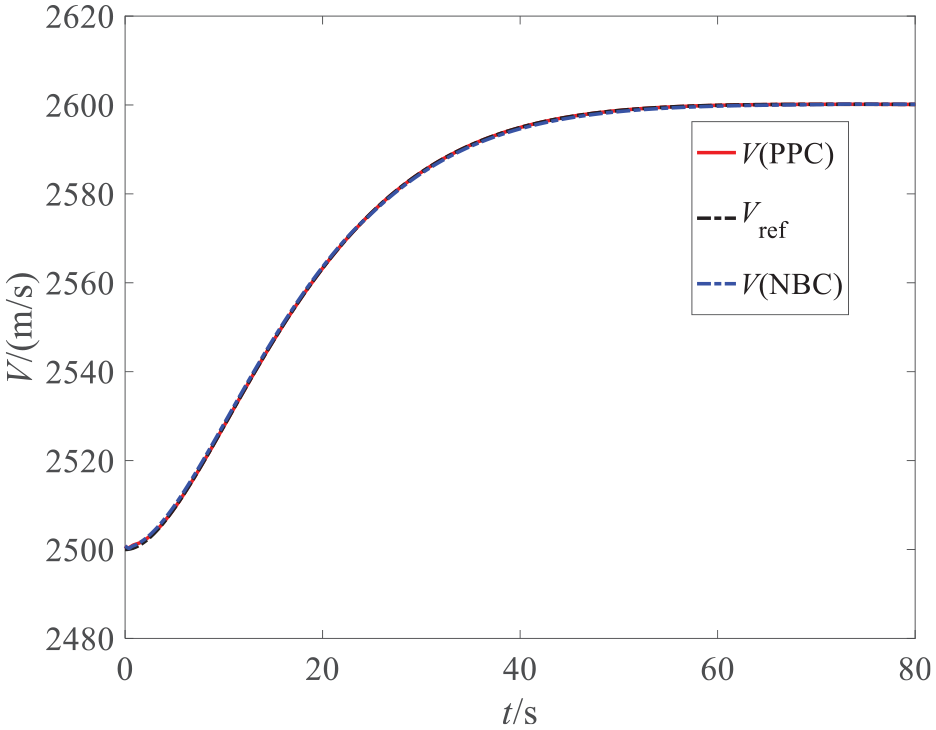
Velocity tracking of Scenario 1.
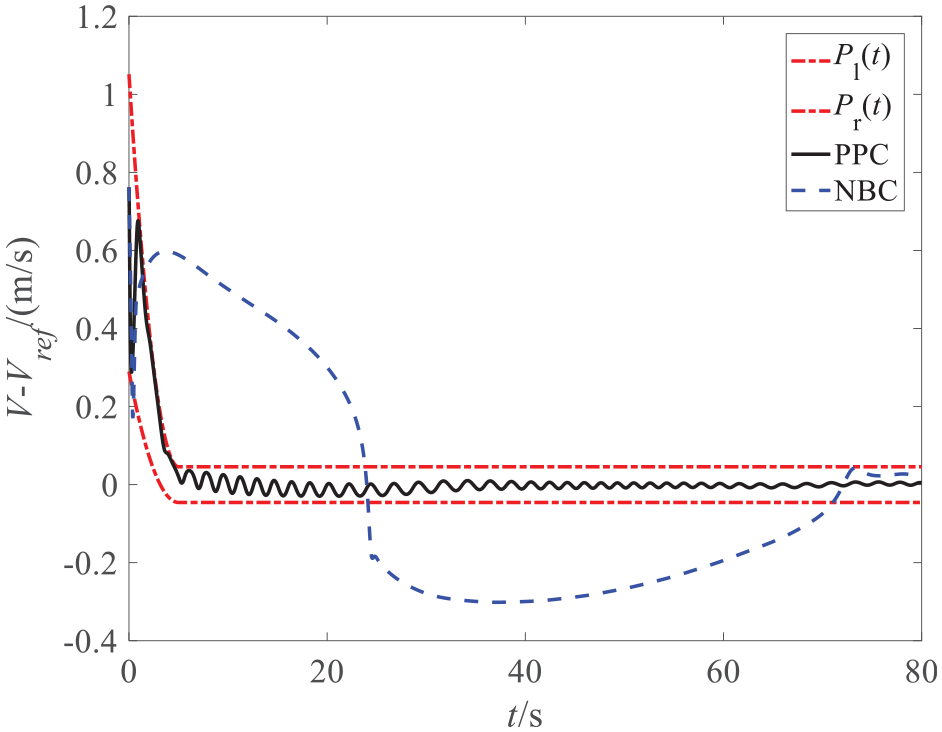
Velocity tracking error of Scenario 1.
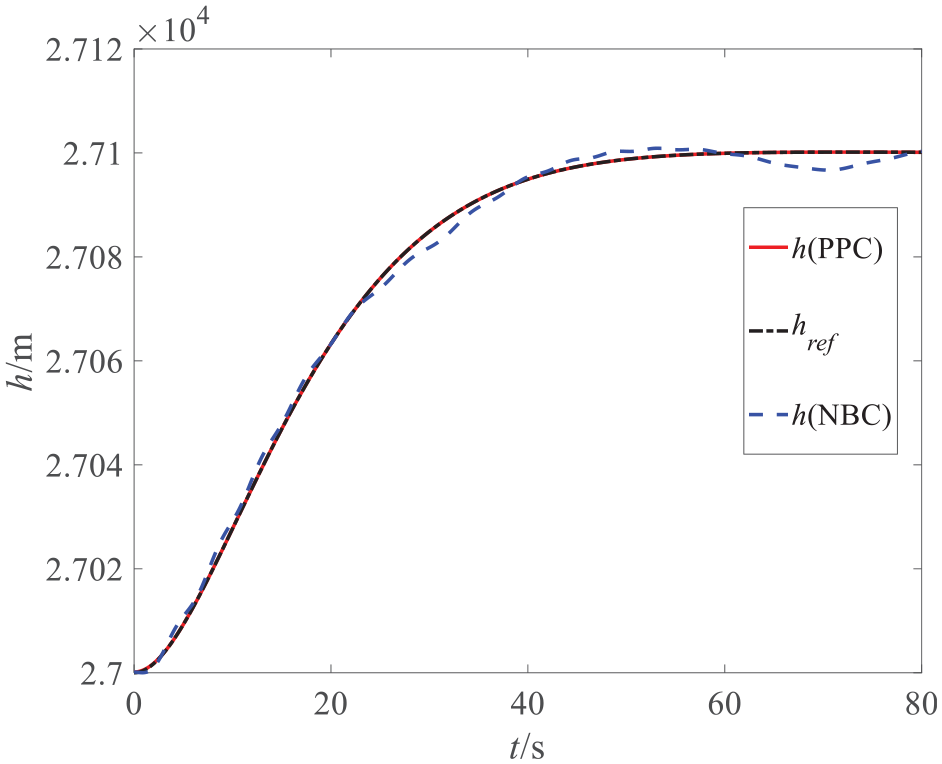
Altitude tracking of Scenario 1.
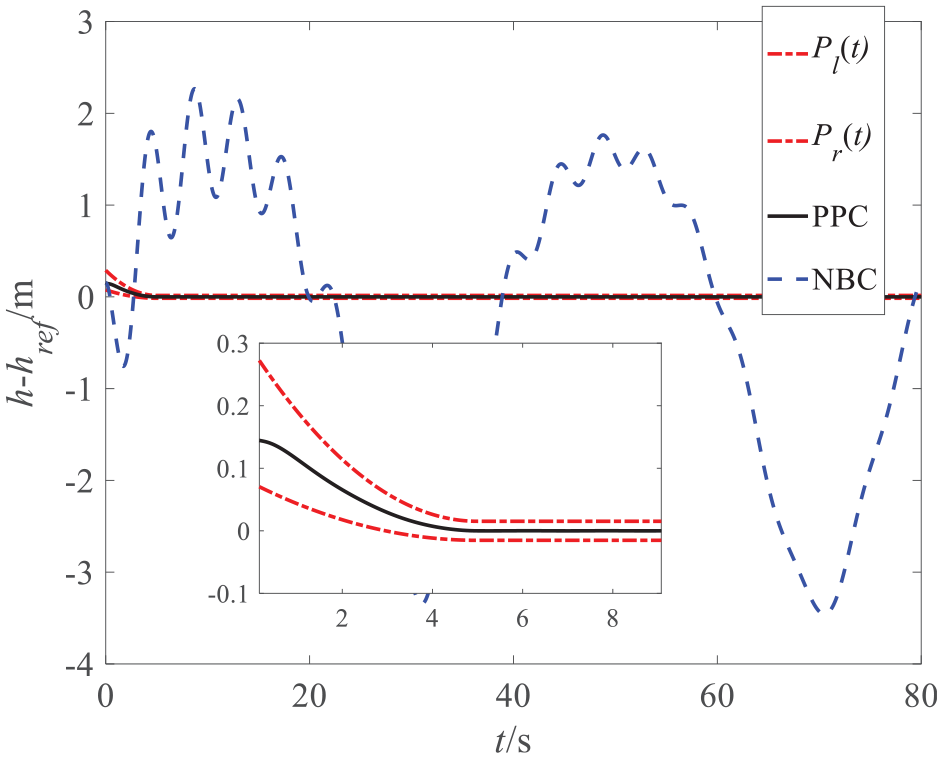
Altitude tracking error of Scenario 1.
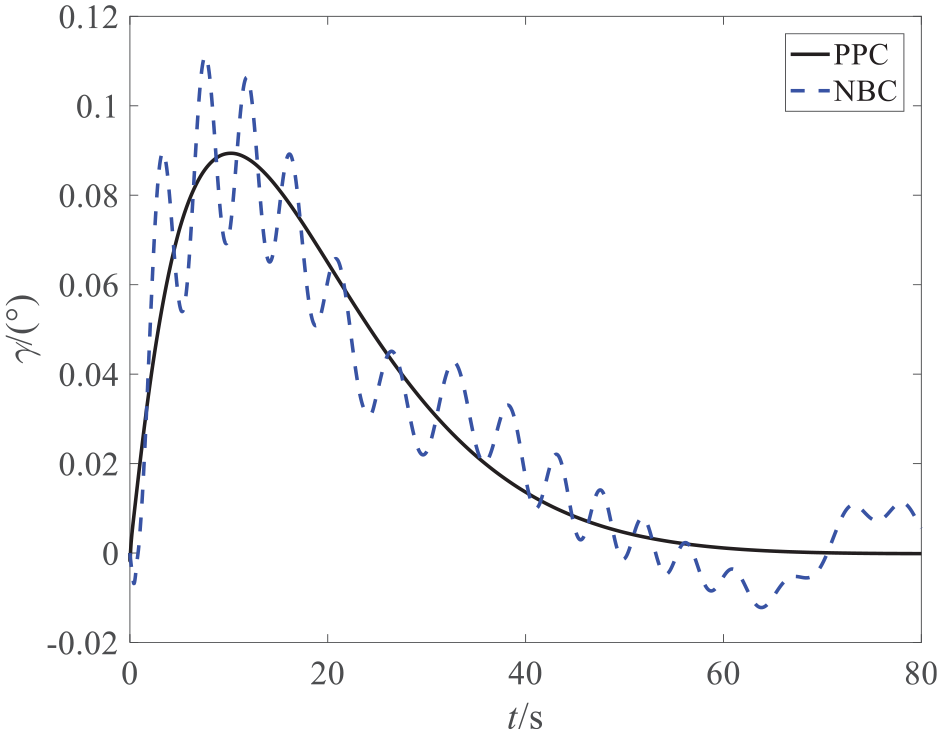
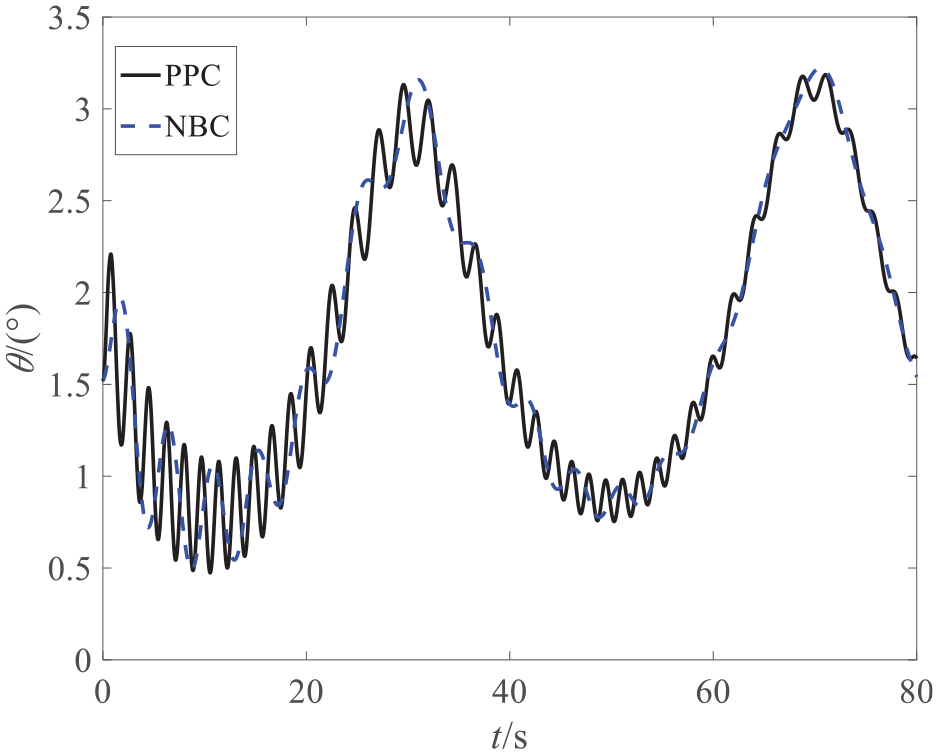
Flight-path angle of Scenario 1.
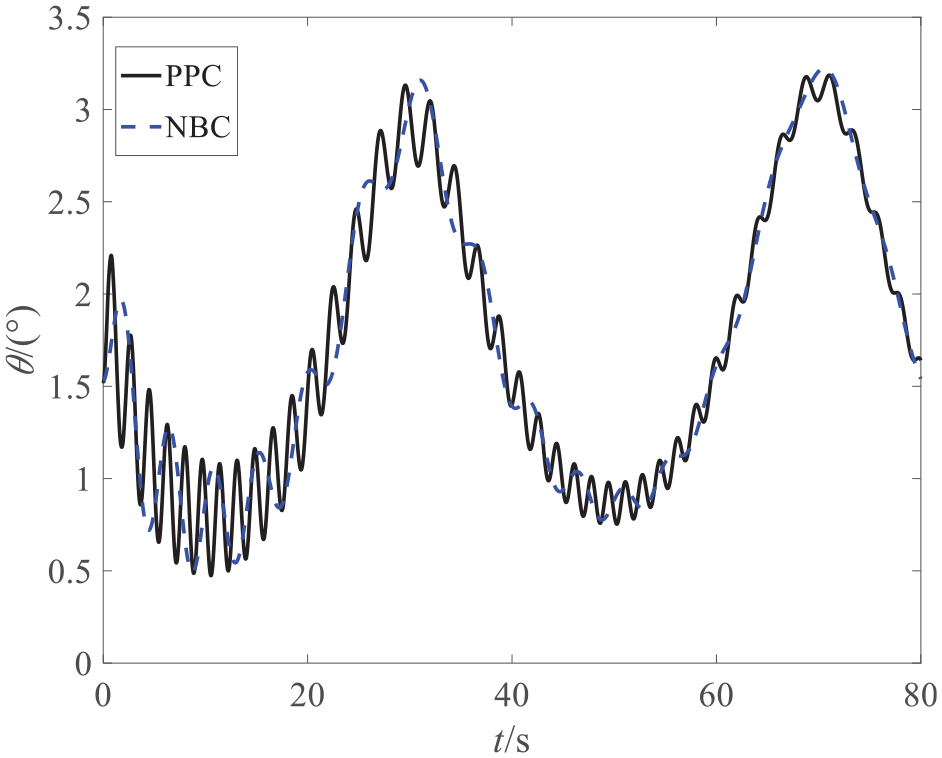
Pitch angle of Scenario 1.
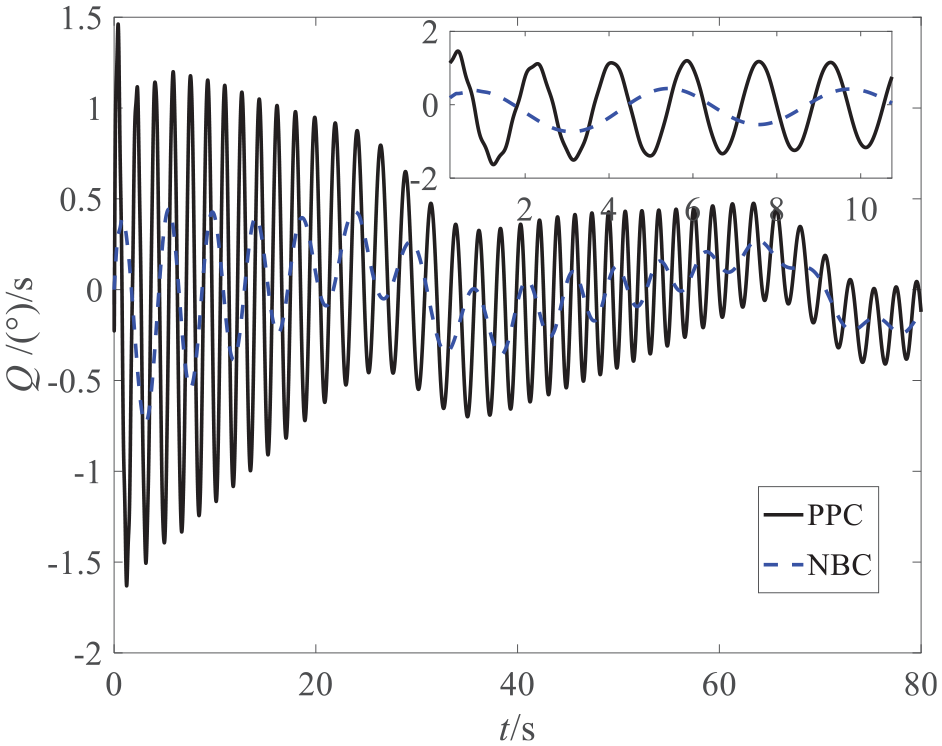
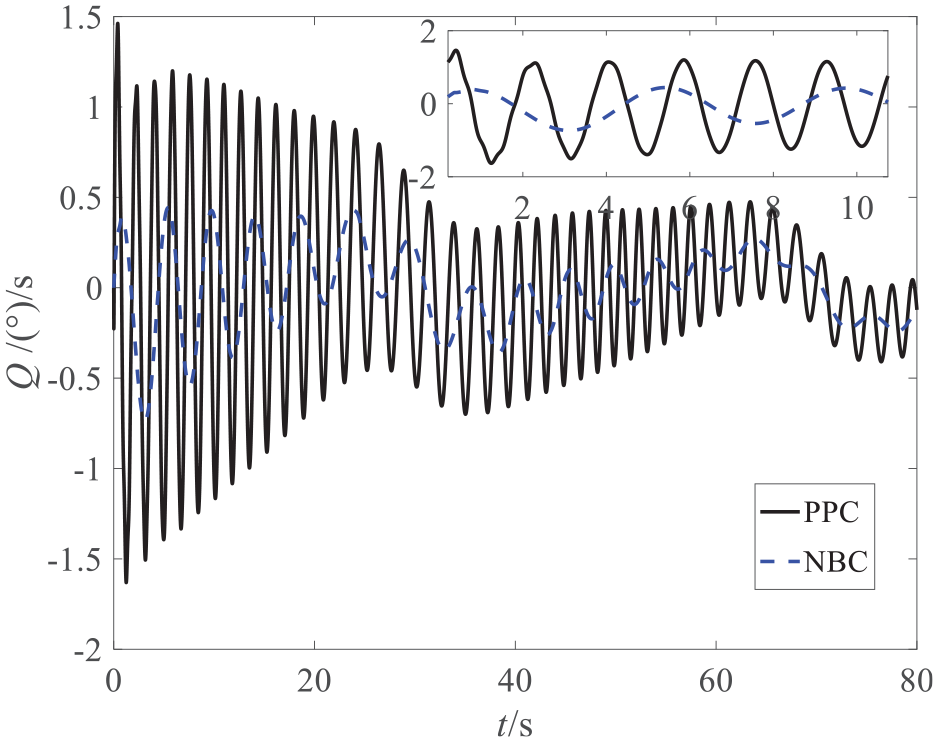
Pitch rate of Scenario 1.
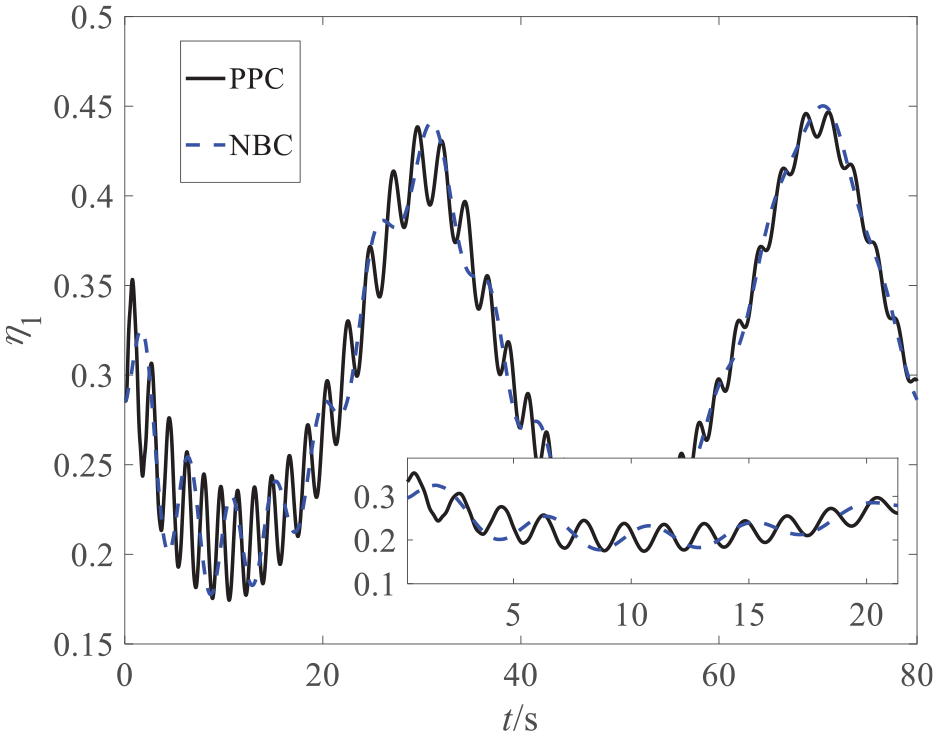
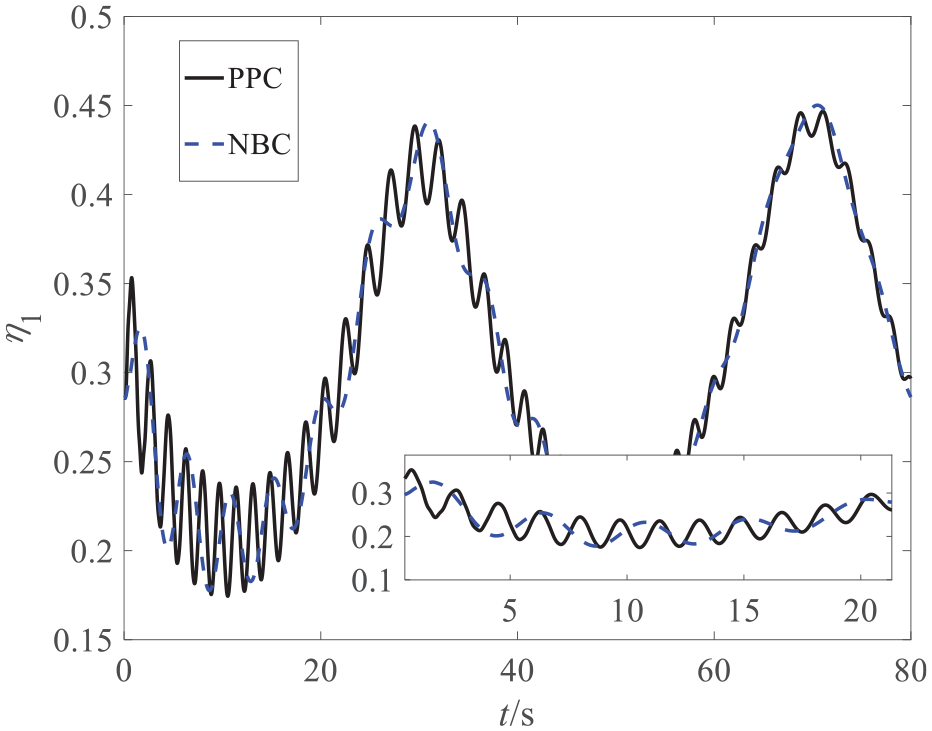
The flexible state
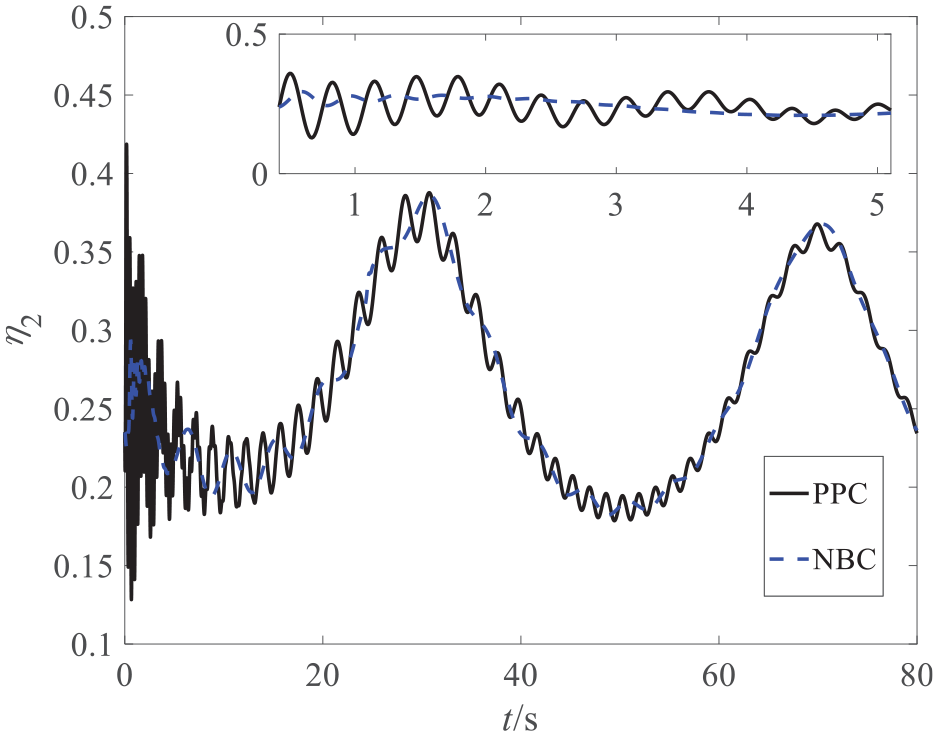
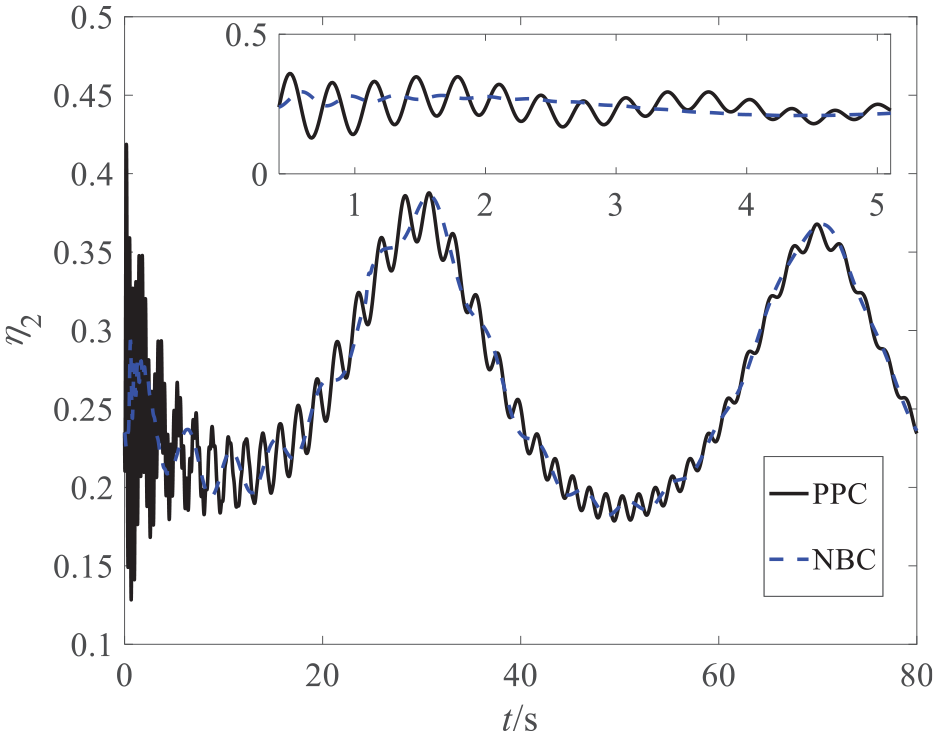
The flexible state
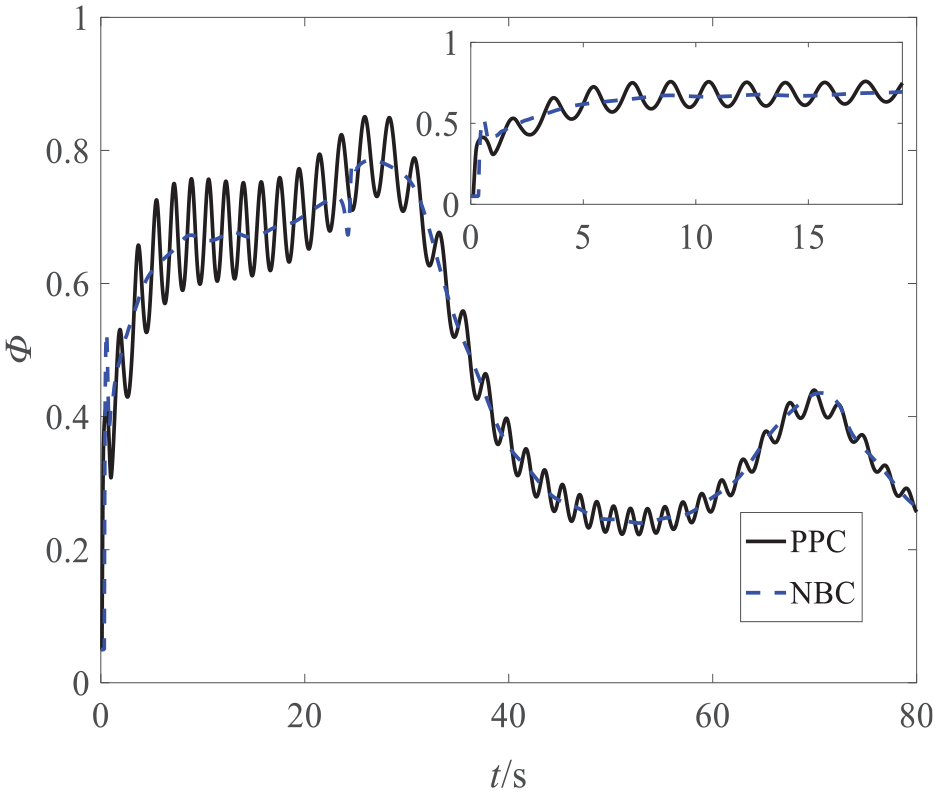
Fuel equivalence ratio of Scenario 1.
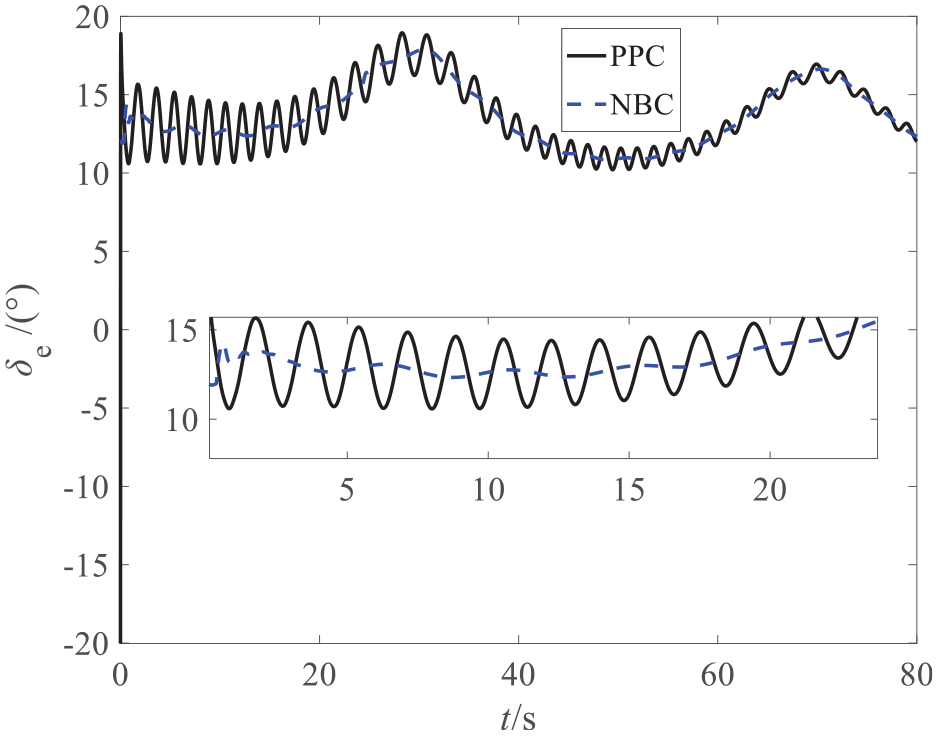
Elevator angular deflection of Scenario 1.
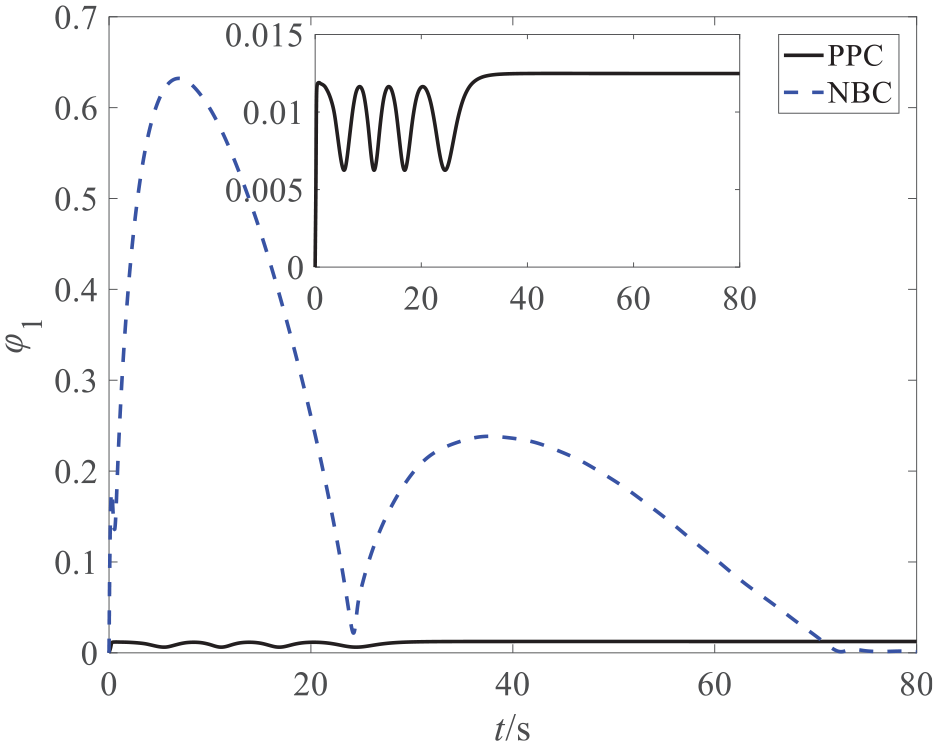
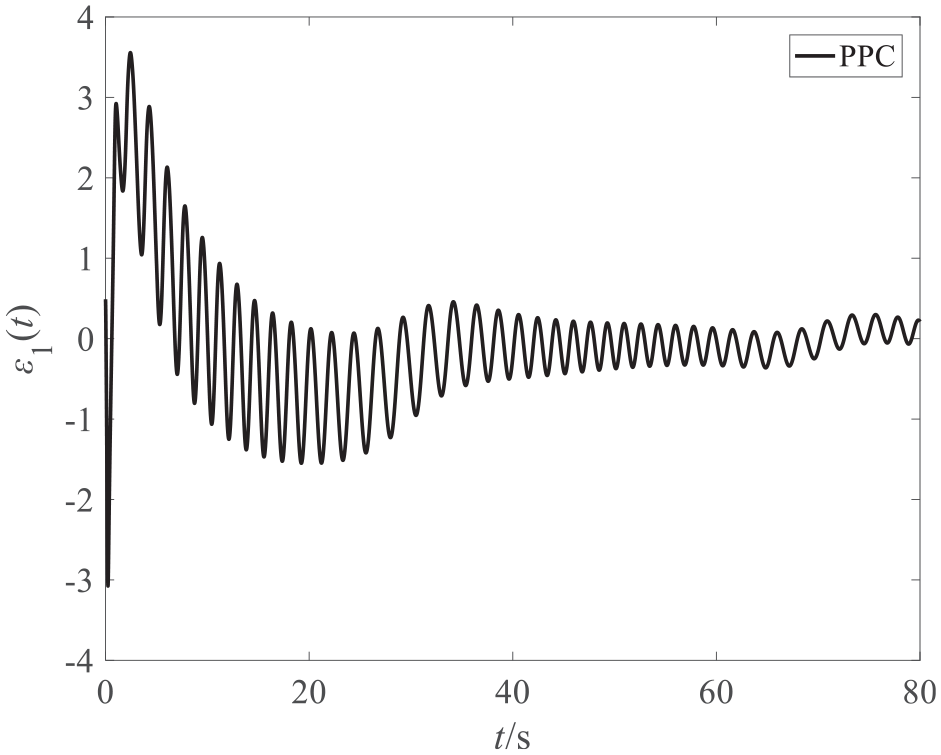
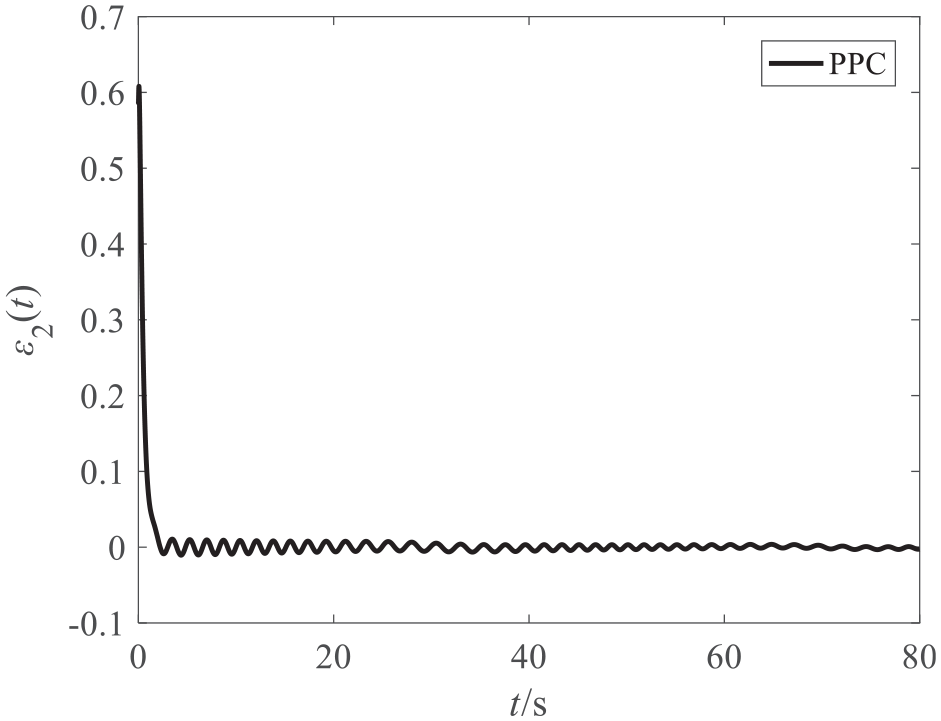
The change curve of
The change curve of
The change curve of
The change curve of
Velocity tracking of Scenario 2.
Velocity tracking error of Scenario 2.
Altitude tracking of Scenario 2.
Altitude tracking error of Scenario 2.
Flight-path angle of Scenario 2.
Pitch angle of Scenario 2.
Pitch rate of Scenario 2.
The flexible state
The flexible state
Fuel equivalence ratio of Scenario 2.
Elevator angular deflection of Scenario 2.
The change curve of
The change curve of
The change curve of
The change curve of
Conclusions
This paper studies the new non-affine PPC method for WVs. By designing a new type of performance function, the control law gets rid of the dependence on the accurate initial value of the tracking error, and it can ensure that all tracking errors have good transient performance and reach a steady state within a limited time. Fuzzy systems are used to approximate the unknown parameters in the altitude control subsystem. The stability of closed-loop control system is proved via Lyapunov method. Finally, the given simulation results show that the proposed method can ensure the velocity and altitude tracking errors with small overshoot and finite-time convergence.
Footnotes
Appendix
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by Young Talent Support Project for Science and Technology (Grant No. 18-JCJQ-QT-007).
Data availability
The experimental data used to support the findings of this study are available from the corresponding author upon request.