
Abstract
To improve the efficiency and accuracy of digital protection of burial sites, the digital protection of burial sites was studied by the collaborative observation technology of LiDAR and unmanned aerial vehicle (UAV) mapping. Multi-feature constrained iterative global registration algorithm is used to realize fast registration of multi-site cloud, the Structure from motion (SFM)-based algorithm is used to generate dense point cloud from UAV image, and then the Iterative Closest Point(ICP) algorithm is used to realize the fusion of point cloud data on-site and image. According to the fused data, a variety of measurable results, such as high-precision burial model and contour map, are produced, and an orthophoto generation system is written independently, which can fully automatically generate high-precision orthophoto map and realize the digitalization of the burial sites. Taking the protection application of the burial site in Yaoheyuan, Ningxia, one of the top 10 archeological discoveries in China in 2017, with guaranteed data accuracy and integrity, the surveying and mapping data of the tomb site was obtained quickly. The global registration accuracy of the proposed algorithm is within 1 cm, and the registration efficiency was superior to the current mainstream open source algorithm, which verified the feasibility and efficiency of this method. It provides an effective scheme for the digital protection of burial cultural heritage, and is also suitable for the digital protection of other heritage sites in the World Heritage List such as Panlongcheng Site and Sanxingdui.
Introduction
As an ancient civilization with a history of 5000 years, China has 55 sites on the World Heritage List, making it the country with the most World Heritage sites, among which burial sites occupy a pivotal position. Funeral custom is an important part of the traditional culture of a nation and a place, and also reflects the cultural accomplishment and moral level of a nation from another perspective. 1 As a bridge linking past and present, tomb culture is an important part of Chinese history and culture, and a window to explore the development of ancient humanity, society, economy, and productivity. 2 Through high-precision data acquisition and rigorous mathematical analysis of burial ruins, we can understand the time of burial better. However, traditional measurement methods often rely on a tape measure, total station, digital camera, and other means to collect data. These methods are not only time-consuming and labor-intensive, but also difficult to obtain accurate and complete primary data, and lack of digital technology, and even cause secondary damage to the burial ruins. 3 Unable to meet the real-time display and measurement requirements. Therefore, a new method of digital protection is urgently needed to provide a new idea for the digital presentation, detection, perception, and monitoring of burial ruins.
LiDAR technology and photogrammetry have been applied in many fields and achieved certain results.4–7 Protection in ancient building monitoring, high precision LiDAR can obtain complex ancient buildings on the surface of a large number of 3d point cloud information, mathematical analysis, the point cloud data can be tilted to ancient buildings, the overall deformation and subsidence have an intuitive comprehensive understanding, provide powerful data support for the next step of protection measures.8,9 Zeybek and Şanlıoğlu investigated four different algorithms to filter a UAV-based 3D raw point cloud data. The filtering algorithms’ results revealed that UAV-generated data suitable for extraction of bare earth surface feature on the different type of a terrain. 10 In terms of status and murals, some scholars obtained a large number of 2D image data of images through close-range photogrammetry, and used the image data to reconstruct the model in 3D. 11 Apply multiple techniques can not only truly record of the monomer building shape, color, texture, style, damage, structural features, and can truly record of the entire distribution patterns of village buildings, roads and other information surrounding terrain. 12 The advantage of this method is that the cost is low, but the quality of the reconstructed model is limited by image pixels, and it is difficult to reconstruct high-quality 3D models due to the phenomenon of voids. Toprak et al. 13 used photogrammetric techniques to build a 3D model generation of the ancient lion tombstone, which is one of the best protected monuments in Phrygia. Some scholars combined LiDAR data and image data to do the deformation monitoring of the ancient pagoda. 14 This method can well avoid the disadvantage of data loss caused by a single data source, and can reconstruct a relatively complete 3D model, but the accuracy of image data and point cloud data fusion is poor. Some scholars have proposed and investigated a novel method which combines dilation and the Canny algorithm to identify and extract the cracks automatically and intelligently based on the point cloud data of terrestrial LiDAR scanning measurement. 15 In addition, some experts have applied airborne LiDAR technology to the digital protection of ancient architectural communities, such as the analysis of hidden ancient structures in Guatemala. 16 This method can quickly obtain three-dimensional spatial information in the survey area, but due to the inherent defects of airborne LiDAR, the accuracy of point cloud obtained is poor, so it is impossible to carry out fine model reconstruction. Some scholars have combined low-altitude aerial photography technology and GIS technology to carry out digital protection of relics. 17 It is simple and efficient, suitable for the digital protection of small and medium-sized ruins. However, it can only obtain the plan of ruins, lacks three-dimensional information, and cannot be applied to large ruins. Zhang et al. 18 collected a large number of digital images of Baixikeng of Qin Shi Huang Mausoleum site utilizing digital close-range photogrammetry, and made DEM, DOM, and Orthographic Projection vector maps of the site. However, the three-dimensional model reconstruction of the excavation site has not been carried out, which cannot reflect the spatial structure of the whole site. Some other scholars applied 3D LiDAR scanning technology to the archeological excavation of the Kongtang Site in Jiangsu province, and carried out 3D reconstruction of tomb models. 19 However, due to the incident Angle of LiDAR scanning, the reconstructed model has some loopholes. Similarly, an expert used Leica Scanstation2 3D LiDAR scanner to collect high-precision 3D data of a tomb, and reconstructed the 3D model using Geomagic Studio software to create a 3D model of the tomb that can be displayed. 20 But it also has the problem of the model void, and there is no image data, which makes it won’t be able to make a true color 3D model.
By summarizing and analyzing the above methods, this paper proposes a burial cultural heritage protection method based on multi-source data fusion. Taking the Ningxia Yaoheyuan sites, one of the top 10 archeological discoveries of China in 2017 as the research object, comprehensively use LiDAR, UAV survey and photogrammetry technology, to collect high precision LiDAR point clouds and UAV image two-dimensional data from the burials, using multi-feature constraint global registration algorithm was carried out on the stand mount point cloud registration, dense point cloud image generated by the method based on the SFM, 21 and finally, completes the fusion of LiDAR point clouds and image point clouds by ICP, and generates the high precision orthophoto by the orthophoto generation system. In this paper, under the difficult problem of large survey area and high precision requirement existing in the burial sites, a multi-constrained iterable global registration algorithm is proposed, which greatly improves the processing efficiency while ensuring the accuracy of registration data, these has quite shown its high robustness and effectiveness. To solve the problem of missing data, 2D data acquisition is carried out by using low-altitude photogrammetry by UAV and close-range photogrammetry by professional camera. Besides, a comprehensive and high-precision point cloud data of the burial sites is obtained by fusing the image dense point cloud obtained by SFM algorithm, which solves the problem of missing point cloud and improves the density and speed of point cloud generation. Late after data processing, various intuitive result data such as 3D models and vector maps can be produced, which can be used for original data retention of cultural relics and digital presentation of real scenes. The method proposed in this paper can be directly applied to the digital protection of burial sites in the heritage list and also has important implications for the protection of other types of heritage.
Key technology
Burial area mapping is different from ordinary mapping, which often has a larger survey area and higher measurement accuracy requirements, and the newly unearthed cultural relics are very fragile, must use contactless measurement method for data acquisition. In this paper we use LiDAR and UAV technology to collect data in the burial sites, and propose an global registration algorithm and a dense point cloud generation algorithm based on SFM, which improves the data processing efficiency and result accuracy, solves the problems of low efficiency and incomplete data acquisition in the burial sites. And we’ve written an orthophoto generation system which is able to generate orthophotos fully automatically.
Multi-feature constraint global registration algorithm
Taking the high-precision control network as the constraint reference, according to the point, line, surface characteristics and mutual constraint relationship of multi-site of point cloud data, using the theory of indirect adjustment, the initial value of site attitude and the unknown point coordinates are solved, and to build the constraint error weighting function as constraint condition for iteration calculation based on the initial values, then realize the overall solution of all point cloud data, as shown in Formula (1) :
Where k is the number of registration point cloud stations, m is the number of point constraint features, n is the number of surface constraint and 9 is the line constraint conditions. The unified results are shown in Formula (2):
In the formula, V represents the observed residual, A represents the coefficient matrix of spatial transformation parameters, t represents the number of spatial transformation parameter corrections, B represents the coefficient matrix of the points to be fixed, X represents the parameters to be fixed, and L represents the observed residuals. The influence degree of different constraints varies. The error weight P is introduced, and the error model constructed for the joint solution is expressed in matrix form as follows:
The use of global registration method can quickly register multi-site cloud data, which greatly saves the internal industry time, and avoids the accumulated error introduced by multi-site transmission, which improves the efficiency and quality of data processing.
Dense point cloud generation algorithm based on SFM
The method based on SFM is used to generate an image-dense point cloud. Firstly, the Scale-invariant feature transform (SIFT) feature detection operator is used to extract and describe the image feature points. Then, SFM and bundle adjustment algorithms are used to recover the initial poses of the camera and carry out a 3D reconstruction of the target. The specific process is shown in Figure 1:
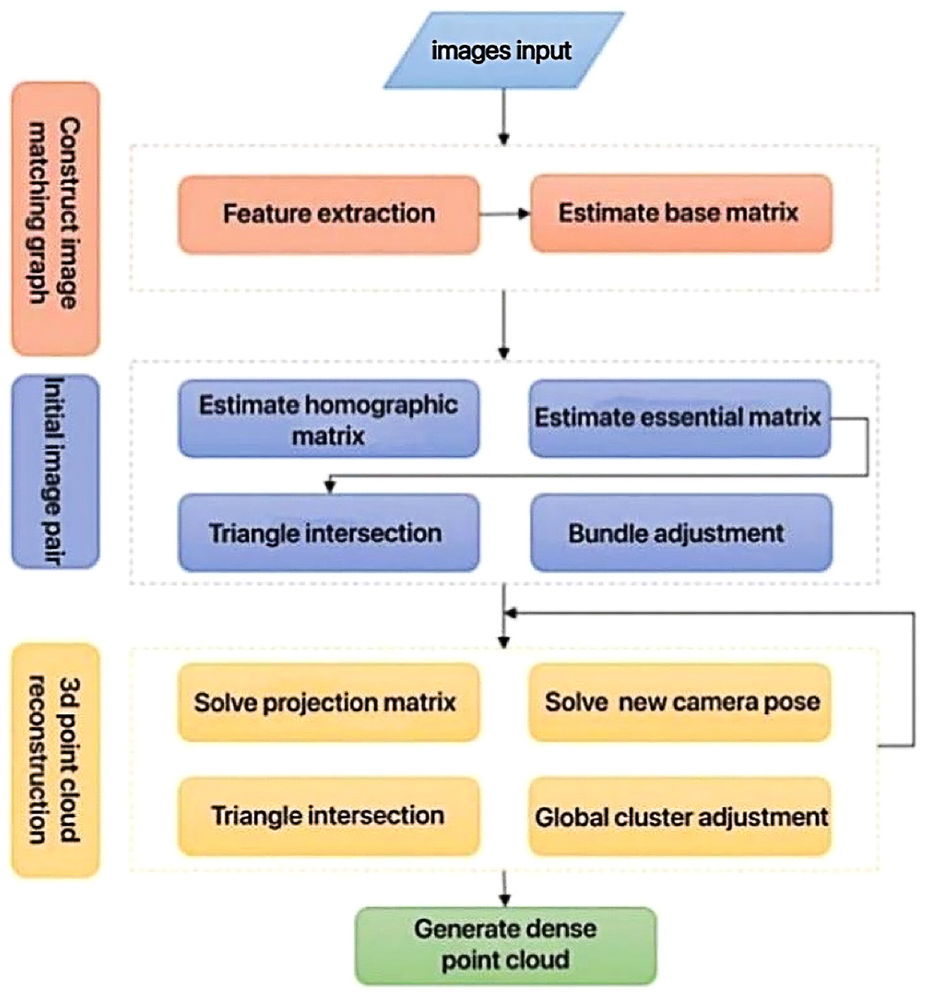
Flow chart of generating the image point cloud.
This paper mainly uses the improved 8-point method and Random sample consensus (RANSAC) algorithm to estimate the basic matrix, and the principle is shown in Formula (4):

For a pair of corresponding points on two images p1 = {x, y, 1}, p1′ = {x′, y′, 1}, if vector F is used to represent a 9-dimensional vector composed of elements and arranged in line priority order, then Formula (4) expansion can be expressed as a vector inner product, as shown in Formula (5) :

If there are n sets of point matching, the linear simultaneous equations as shown in Formula (6) can be obtained:
This equations are homogeneous equations, which means f can be determined to differ by only one constant factor. If there is a solution, the rank of matrix A must be at most 8. If the rank is 8, then the system of equations has a unique solution, which can be solved by a linear algorithm, and that solution is the right null space of A.
Orthophoto generation algorithm
Point cloud data have the characteristics of high-precision and high density, but it also brings many difficulties to later data processing. Processing point cloud data often requires high professional level of hardware equipment and processing personnel. Guo et al. proposed a method to automatically generate elevation orthophoto based on 3D point cloud. On the premise of ensuring observation accuracy, the method provides small and complete basic data, avoids data redundancy, improves work efficiency and is convenient for use in various fields. 22 In this paper, a method based on point cloud to directly generate orthophoto is proposed, which can improve the efficiency of data processing while ensuring accuracy.
Orthographic projection is used for point cloud projection and the least square method is used to fit projection datum. Let the equation of the fitted plane be

In Formula (8):
Substituting point cloud coordinates into Formula (8), the coefficients a0, a1, a2 are obtained. After simplification we’ve got the fitting datum normal vector as [a1,a2,1], standardized as shown in Formula (9):
In way of orthographic projection, mutually parallel rays are projected through the point cloud at the infinite point of view and intersect vertically with the projection plane at a certain point, where the vertical foot is the coordinate of the projection point. The component vectors of the point cloud coordinates (x0,y0,z0) and the projection point coordinates (x1, y1, z1) are parallel to the normal vector of the projection plane (Fx, Fy, Fz) so that the projection point coordinates can be solved.
Scheme design and experiment
According to the actual reconnaissance situation, formulate the technical route of data acquisition. Firstly, determine the spatial position of the burial site area, and use global observation to establish the primary control network and encrypt the photo control points and scanning control points. The primary control points are combined with the Precise Ephemeris to ensure the precision of the control points. The station-based LiDAR is used to carry out routine scanning of the overall outline of each tomb pit, and for key areas, local fine and encrypted scanning are carried out based on routine, to ensure data integrity and improve the accuracy of key areas. Due to a large amount of noise in the collected data, the noise removal is firstly carried out, and the single station data after noise removal were aligned and texture mapped, with the accuracy of alignment is guaranteed to be below 3 mm to establish the overall point cloud model of the survey area. Digital photogrammetry is divided into aerial photogrammetry and close range photogrammetry. Firstly, the aerial automatic route planning method is used to build the overall model of the survey area. Then, the oblique photography method is used to manually control the observation of a single tomb pit. The SFM method was used to generate image density points, and the ICP 23 algorithm was used to fuse the LiDAR point cloud and the image point cloud. To establish the overall unified true color 3D model, output the plane, cutting, contour map, the elevation of vertigo figure, forms and other measurable analysis results. Use the iself-developed programs for the production of orthophotography inside and outside the burial site, through the results achieving three-dimensional display, burial site measurement, multi-dimensional detection, virtual restoration, so as to realize the digital protection of burial cultural heritage. The technical process is shown in Figure 2:
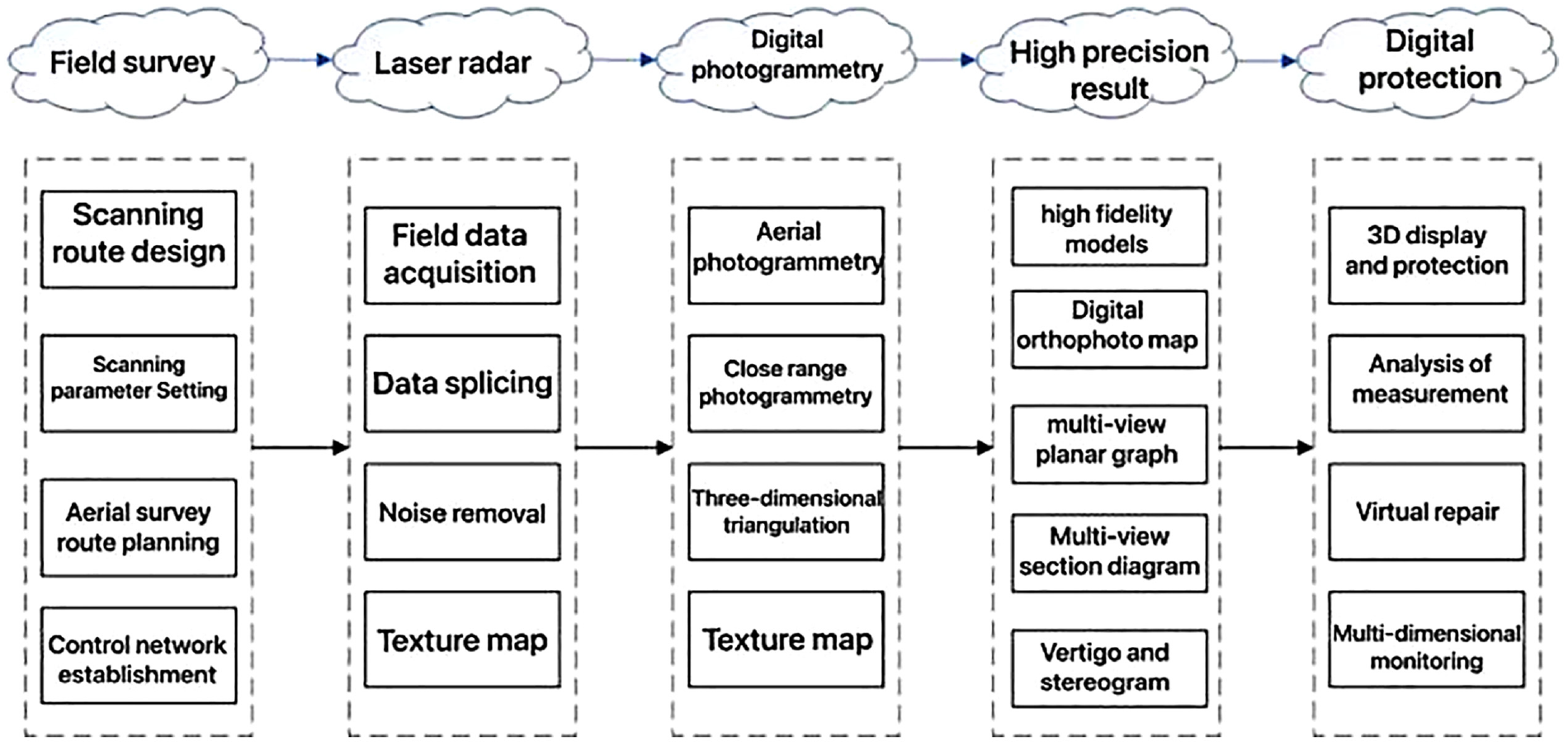
Refined reconstruction and analysis process.
Establishment of the control network
The control network is the unified coordinate datum of the survey area environment. The high precision control network provides the basis for the processing of LiDAR data and digital photogrammetry data. Through the field exploration of the site and its surrounding environment, five fixed points were selected to establish the primary control network through static observation. The GNSS receiver was used to make a long-term static observation of the selected visibility points, combined the observation data and known high-level control points with constraint adjustment processing to obtain the primary control network. In order to make the measurement results more accurate, the control points are encrypted on the primary control points, the terrain and ground object conditions are fully utilized, while the control points arranged in clear and obvious locations that can evenly cover the whole survey area. The specific layout effect is shown in Figure 3:

Control network layout.
LiDAR data acquisition and processing
In this paper, a FARO Focus X130 LiDAR is used to obtain point cloud data of the analyzed burial area. The specific technical parameters are shown in Table 1 below:
The Technical parameter of FARO Focus X130.
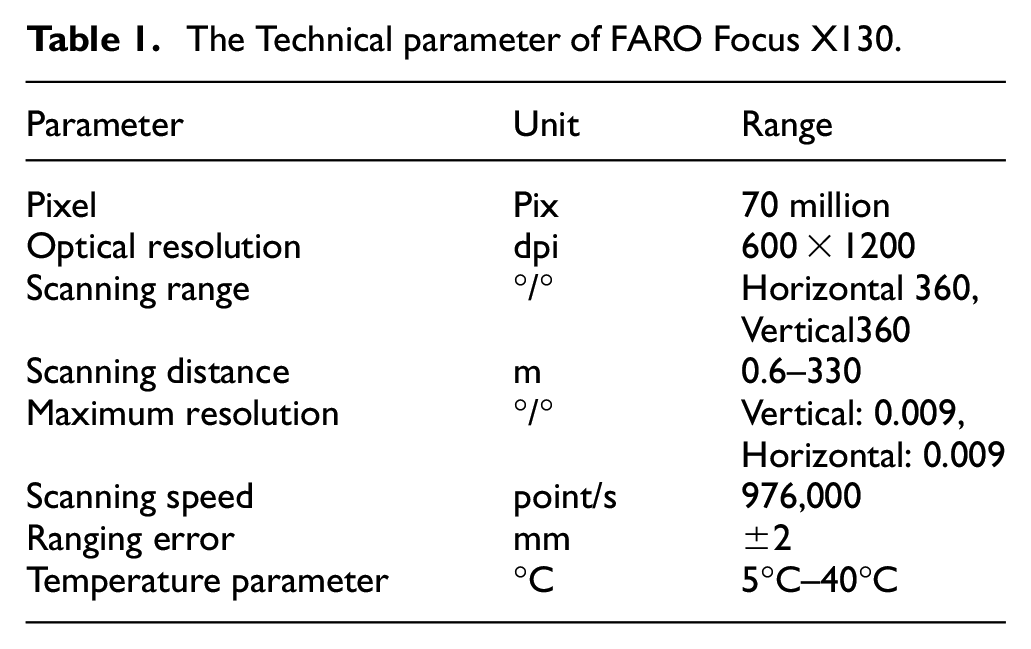
The protection of the tombs by LiDAR can be divided into two parts as the internal and external industry, data acquisition when considering time, influence factors, can be summarized as scanning parameter settings and the station deployment, the scanning parameter determines the data quality and sparsity, the higher the resolution and quality, the more the number of point clouds obtained, and the longer the time spent. In this paper, a scanning parameter of mass 3X and resolution 1/8 is used, and the data volume of a single station is about 40 million points. The station deployment considers the scanning angle range of the scanner, and the two stations are arranged according to the word “Z” to complement each other to ensure the integrity of data acquisition. At the same time, more than three common targets between the two stations to facilitate the internal data processing. When scanning encrypted points, special material marks, such as planar or spherical targets, are used to obtain a large number of points on the surface of the measured object through LiDAR, accurately extract the coordinates of the central point, and accurately correspond to the observation data of the total station to fully ensure the accuracy of data observation. The on-site collection is shown in Figure 4:

LiDAR data acquisition.
Due to the large amount of cloud data at a single station, there are certain difficulties in internal processing. If the method of single-site alignment is used, there will be cumulative errors, which not only fail to meet the final accuracy requirements, but also require greater investment in both human and material resources. Therefore, an iterable global registration algorithm is proposed in this paper, using this method for data alignment, and converting multi-station data to a unified coordinate datum at one time to form a complete point cloud model, which greatly improves work efficiency while ensuring data accuracy. The Iterative global registration software is shown in Figure 5:
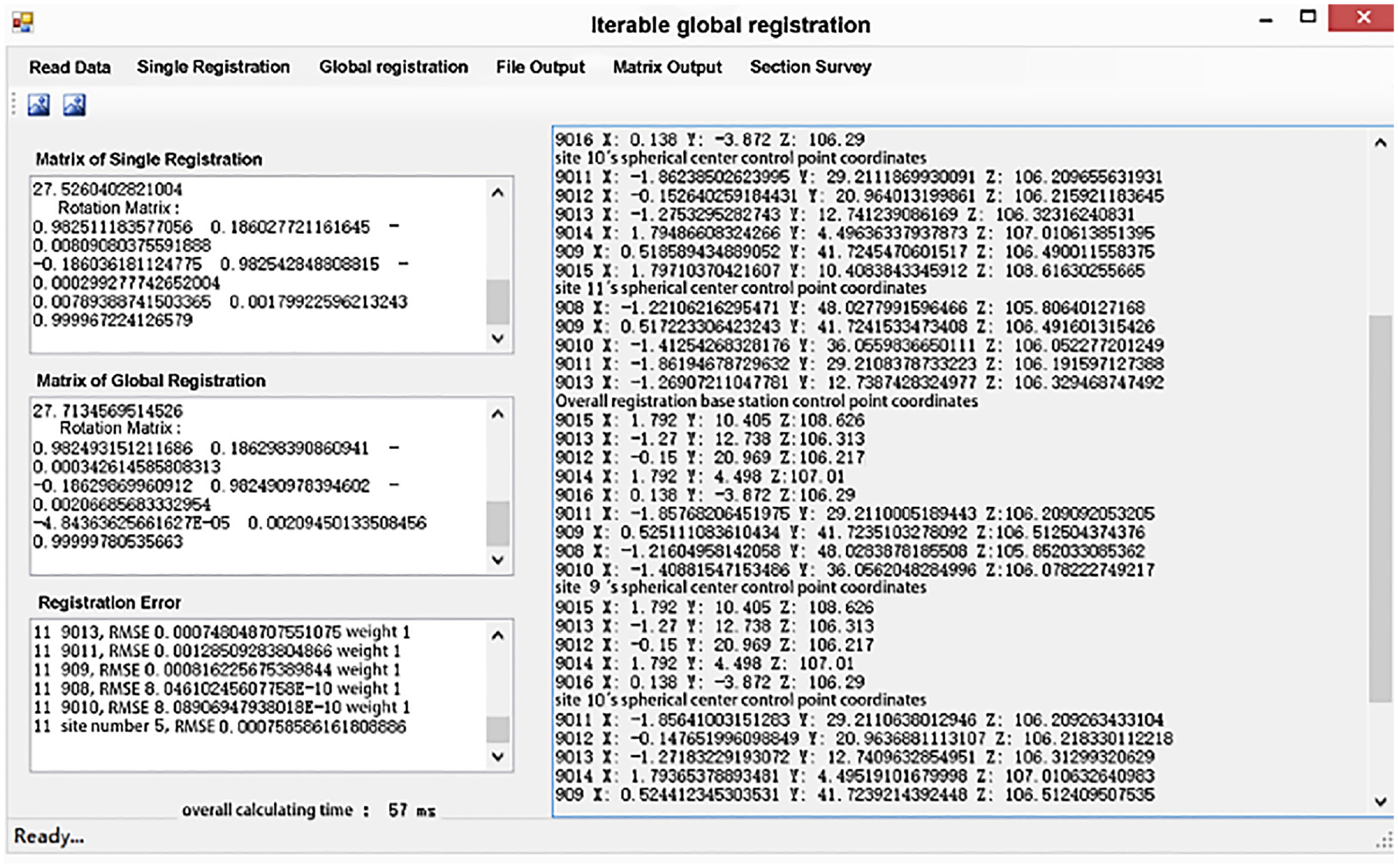
Iterative global registration software.
Digital photogrammetry data acquisition and processing
It is obvious that using digital close-range photogrammetry has many advantages in the documentation and protection of cultural heritage. Photogrammetry uses only photographs and mathematical equations. These are important in view of correct and accurate measurement of cultural heritage. In addition, it is possible to evaluate the situation after the restoration. Photogrammetry has much more superiority over traditional methods in restoration projects. 24 During digital photogrammetry, the UAV survey equipped with a high-precision fixed-focus lens camera is used to take vertical and oblique photographs of the overall area of the burial site to ensure that the navigation overlap degree is 80% and the lateral overlap degree is more than 70%. Firstly, the overall aerial photograph of the test area is taken by automatically planned routes, and then further observation of a single burial pit is carried out by manual control. The high-precision digital SLR camera is used to make up the area that the UAV survey can’t reach.
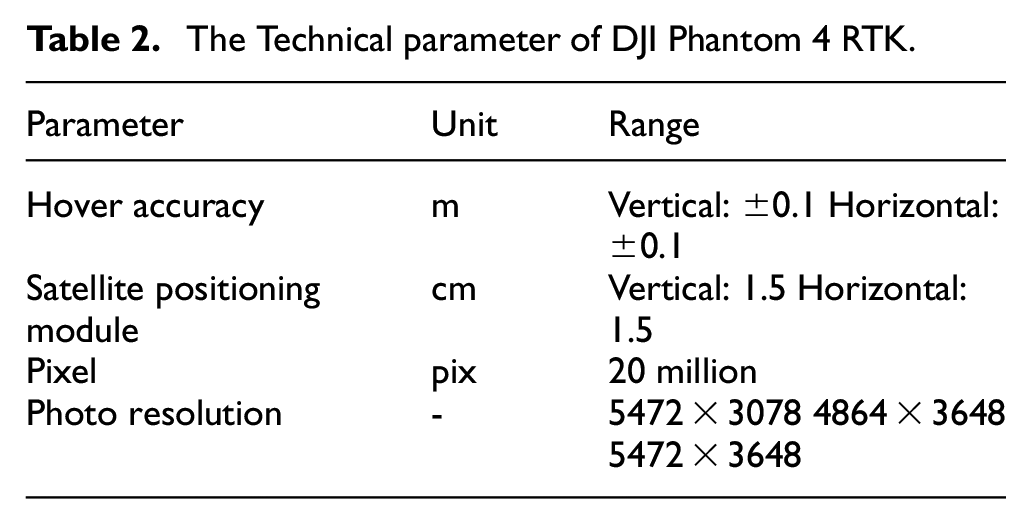
In this paper, DJI PHANTOM 4 RTK UAV survey was used for the low-altitude photogrammetric survey, and Canon 5D Mark II digital camera was used for the supplementary survey. The technical parameters are shown in Tables 2 and 3:
The Technical parameter of DJI Phantom 4 RTK.
The technical parameter of Canon 5D Mark II.

After the completion of image data acquisition, the method based on SFM is used to generate image dense point clouds.
Figure 6 shows the field working diagram taken by UAV survey close-range photogrammetry and high-precision camera in the process of data acquisition.
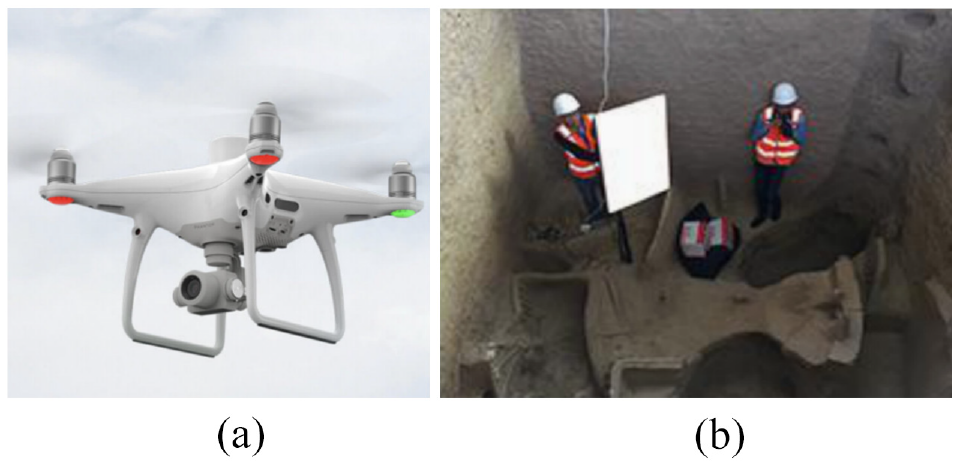
Photogrammetric data acquisition: (a) ultra-low altitude measurement of UAV survey and (b) high-precision camera shooting.
Multi-source data fusion
Digital photogrammetry will obtain the high precision image through dense matching, quickly obtain 3D scene information of the features, use SIFT feature detection operator to extract image feature points, obtain enough feature points that can reflect the essential features of the image and can identify the target object in the image to build a dense point cloud, and on this basis to build true color model has high precision, which provides for LiDAR and digital photography a fusion method, the precision of the data fusion becomes the key which directly affects the modeling and texture mapping effect. In order to ensure the data accuracy, this paper uses ICP algorithm combined with control points for data fusion. The ICP algorithm is used to iterate the nearest points between point sets, calculate the optimal rotation and translation parameters so that the image point cloud and the LiDAR point cloud can reach the optimal matching results, and the general matching accuracy is below 3 mm to meet the requirements of modeling accuracy.
For multi-scale images of the ground and aerial images, if the ground image contains the same coordinates as aerial image, all images can be fused for joint aerial triangulation, if the coordinate systems are different, image aerial triangulation needs to be done separately, and uses the corresponding points to fuse the two together.
Multi-source data fusion makes up for the digital photography perspective is not wide enough and low accuracy near the ground, solves the problem of the model, while using the ground feature points obtained by LiDAR, which can reduce the field work of laying a large number of image control points by tilt photography, greatly improving the work efficiency, achieved the air-ground integration. The specific effect is shown in Figure 7, where Figure 7(a) is the acquired LiDAR point cloud data, Figure 7(b) is the dense point cloud data constructed from the high-precision images acquired by digital photogrammetry, and Figure 7(c) is the optimal matching result after fusion using the algorithm, and the comparison can obviously show that the data fusion result is better and more accurate.
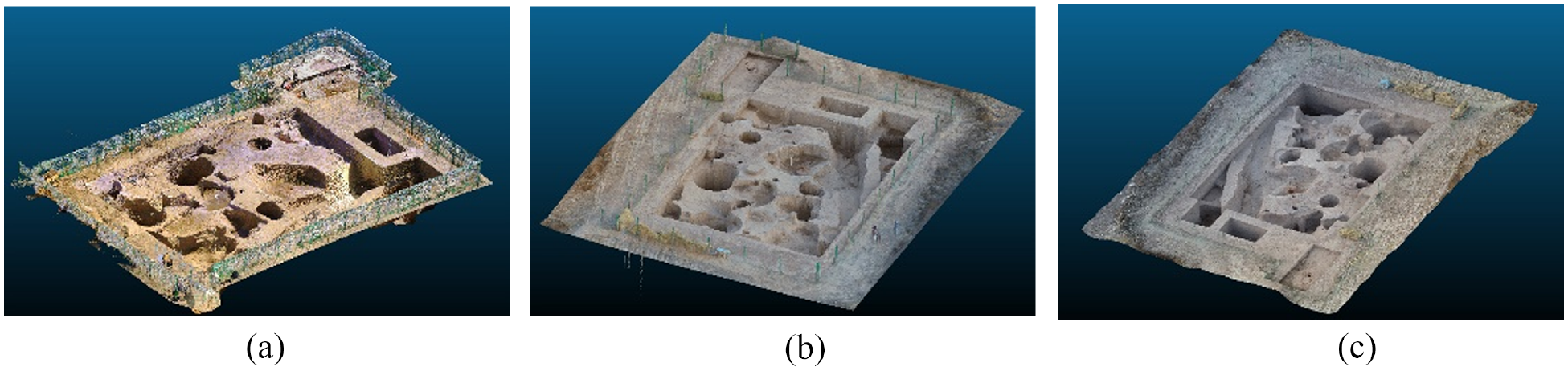
Multi-source data fusion: (a) point cloud of LiDAR, (b) point cloud of photo, and (c) data fusion result.
Data processing and analysis
Orthophoto generation
Using C# programing language to design point map projection system independently, within the orthographic projection method, it is adopted to improve the images of the facade, no matter how far view distance object, the size and dimension of the object remains the same after projection, ensure the accuracy of the measured object on the figure, the projection view for six is the most common view, based on the projection viewpoint to the conversion model of the image point, and the 3D coordinates are mapped to the 2D images. On this basis, the pixel value of the coordinate of the image point is calculated, the existing RGB information is fused with three channels, and the additive color mixing method is used to build the three-primary color superposition model, so as to realize the production of the true color orthophoto of the point cloud.
In this paper, the point spacing is set as 5 mm, and the upper limit of image resolution as 10,000, to generate the projection map of the interior elevation of the tomb, which showns in Figure 8 . The obtained image is scaled in CAD according to a certain scale, we took a eastern cutting plane here as an example shown in Figure 9:
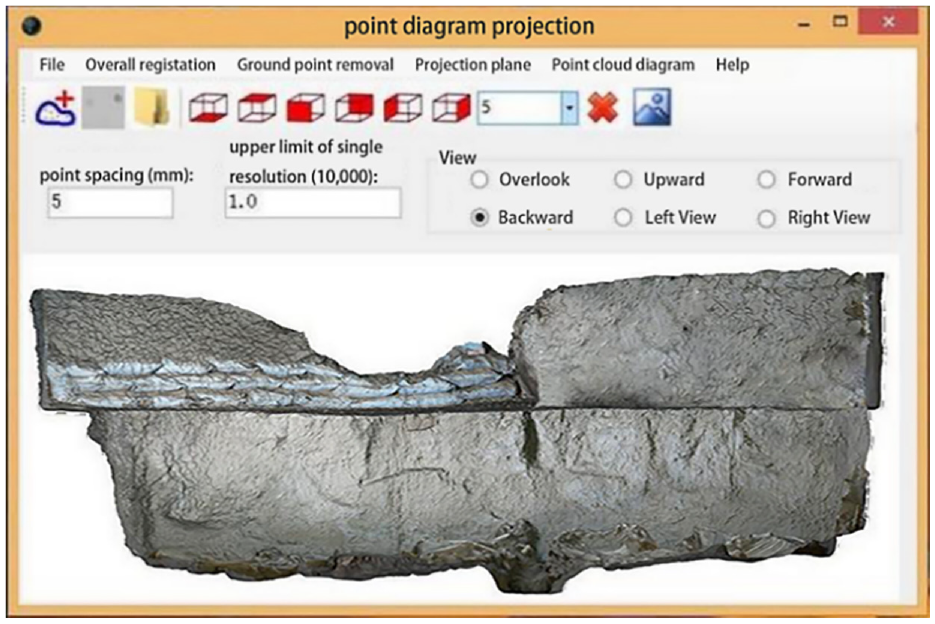
Point map projection system.

Orthophoto of interior elevation: (a) direction of cutting position and (b)section Orthophoto.
Measurement and analysis
Overall analysis and measurement
The overall overview of the site is the primary data for the protection of burial cultural heritage. Through the analysis of the topography, landform and other features of the site area provides the basis for the overall planning of heritage protection work. Through the fusion of multi-source data, the Digital Elevation Model (DEM), Digital Orthophoto Map (DOM), plane distribution map and other results are produced. The construction effect of the high-precision model is shown in Figure 10, which can provide an overall understanding of the topography and site distribution in the survey area. Burial sites are generally built on high terrain, the DEM and contour model can visualize the height difference and slope change of the site area. Figure 10(b) is a contour model with a height difference of 1 m, and Figure 10(c) is a DEM model.
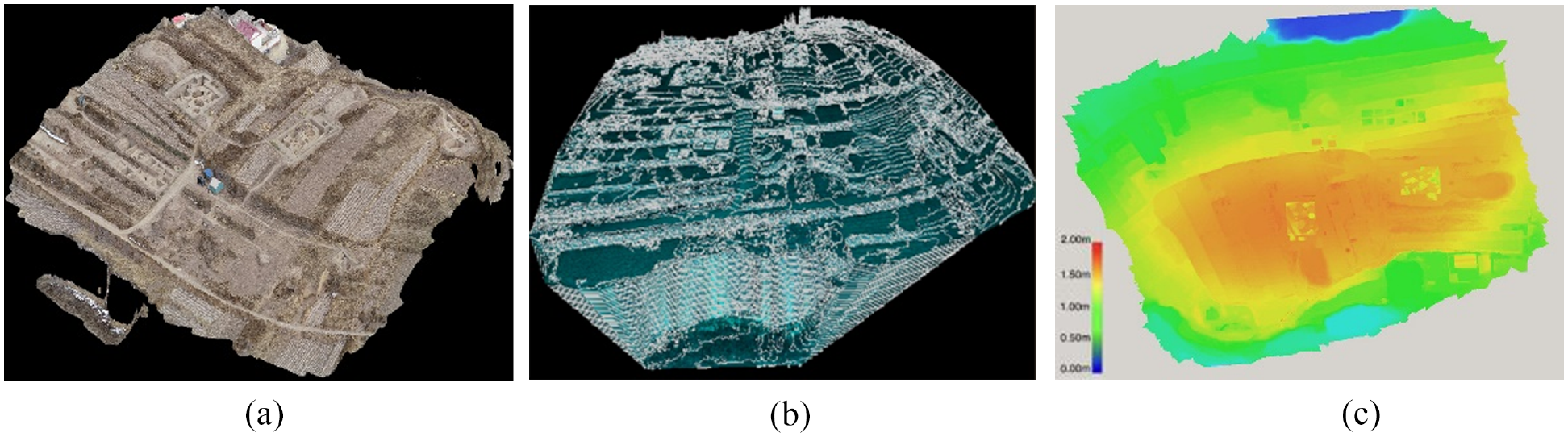
High precision 3D model: (a) true color model, (b) contour model, and (c) Digital Elevation Model (DEM).
Another indicator of the overall site profile is the measurability, which is the area and volume of the measured area, these can be intuitively measured based on point clouds and high-precision models. Figure 11 shows the measurement results of the area and volume of the site, the area is 4,5035.149 m2 and the volume is 287,110.460 m3.
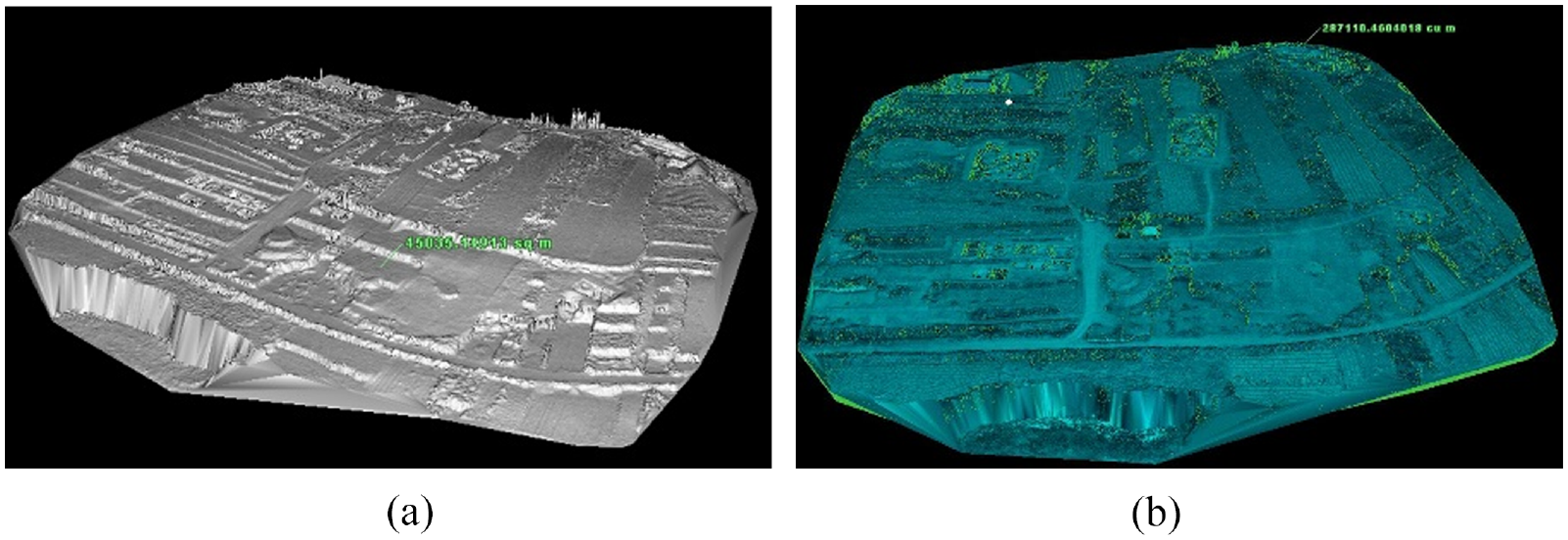
Area and volume mapping: (a) area calculation reference plane and (b) volume calculation reference model.
Partial analysis and measurement
In site archeological protection work, ruins and unearthed cultural relics of spatial 3D position information is essential, which is a basic material for the research and the current status of interpretation sites, traditional methods using a tape measure, level feet tools such as measuring and drawing on the papers, its accuracy is difficult to guarantee. Yang proposed the applicable technical model of object-oriented 3D site information collection and modeling, providing a new way for the fine, digital and precise collection, recording, interpretation and digital mapping of time and space information in the process of site excavation. 25 We’ve used the method based on point cloud and model to determine the relics based on spatial information, achieve millimeter level accuracy, It fully meets the requirements of site protection. Figure 12 shows the spatial location of site burial group M1 in the overall model, and the location of relics can be quickly found through the model. Figure 13 shows the specific coordinate distribution of relics in the measurement results.
Local spatial location map: (a) spatial position and (b) M1 tomb pit.
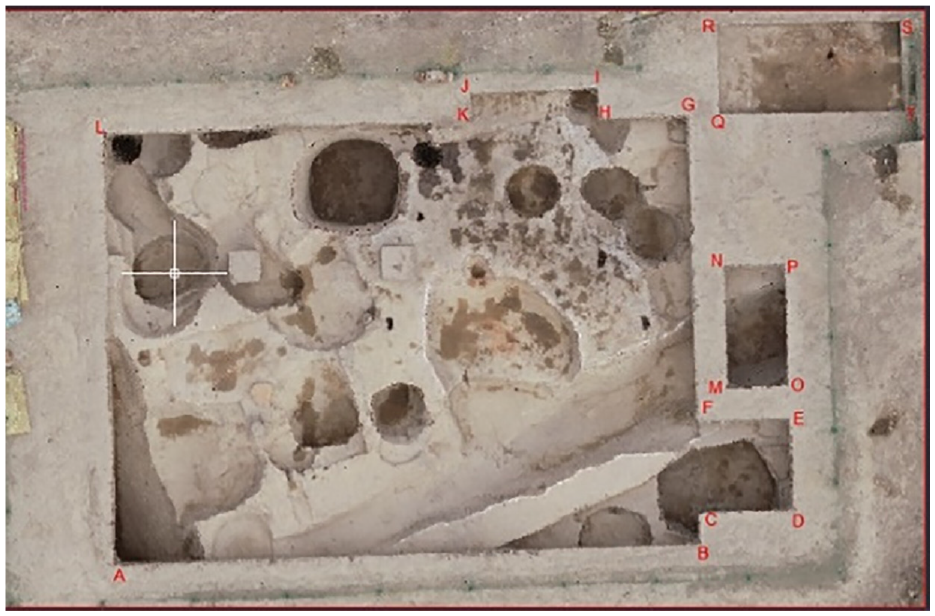
Coordinate distribution map of Miaodigou period relics.
On the basis of the model, a detailed digital analysis and graphic production of the burial are carried out. The plane and section maps can visually display the plane distribution and composition relationship of the burial pit, which is helpful to understand its detailed structure. Measuring and analyzing the site in horizontal and vertical directions and drawing plane and contour maps are helpful to understand the topography, topography and stratigraphy of the detailed structure of the burial, the results of which is shown in Figure 14:
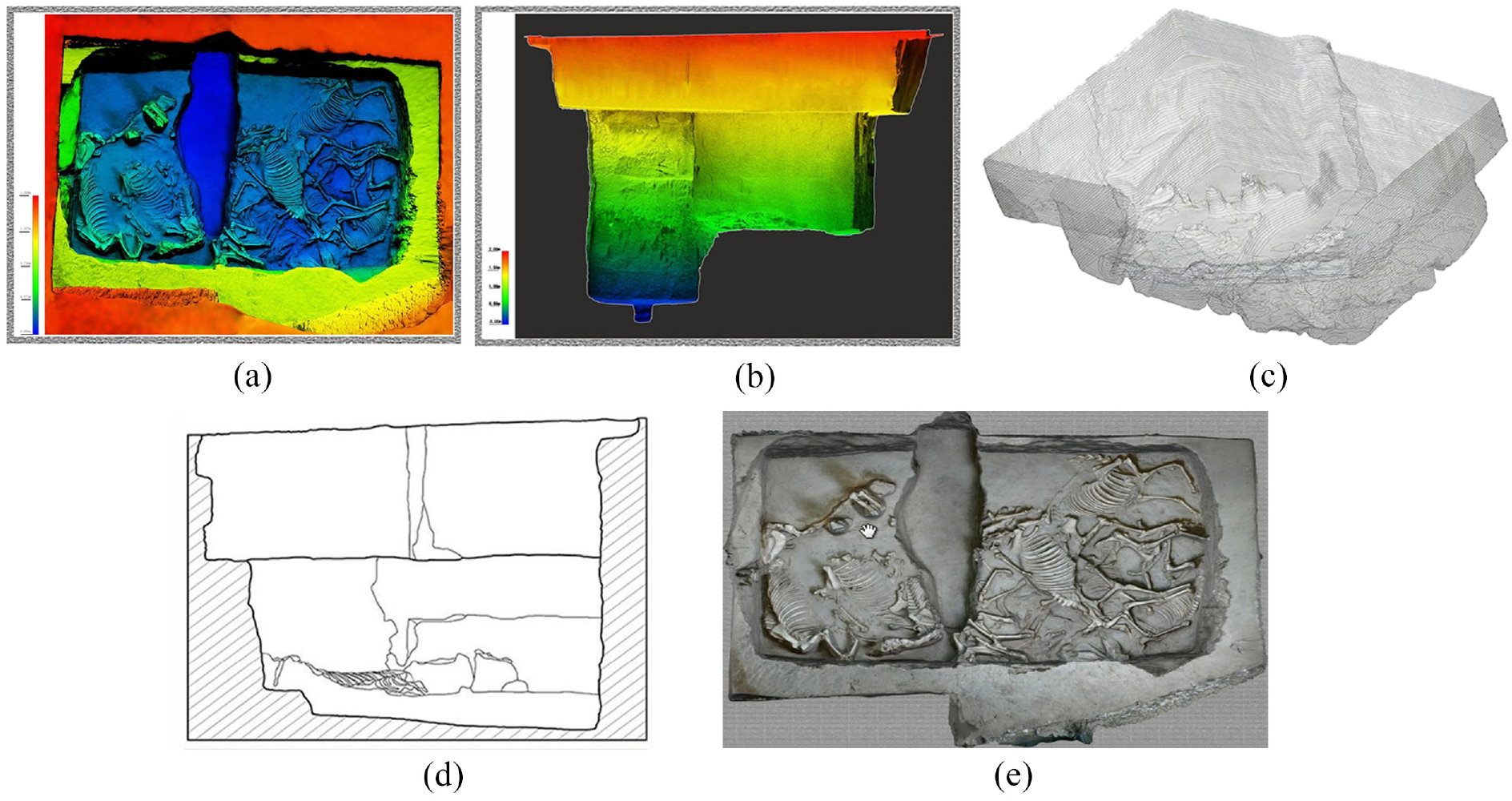
Multiple measurement analysis charts: (a) elevation rendering of the plane, (b) elevation rendering of the facade,(c) isoline chart, (d) chart of cutting line, and (e) Orthophoto map.
Monitoring protection analysis
Monitoring is an important part of cultural heritage protection, as well as an important means of protecting immovable cultural relics such as tombs. Through regular monitoring of cultural relics or sites, damage problems can be detected in time, which provides a scientific decision-making basis for protection scheme design and can also evaluate the protective effect of cultural heritage. Campiani et al. 26 used a geo-spatial method for assessing the state of preservation of earthen architecture overtime as a preventive conservation measure. Reale et al. 27 used the approach exploits satellite deformation measurements to validate the first interpretation of the structural behavior of a construction threatened by ground instability based on visual inspection and the analysis of the crack pattern. Traditional monitoring often relies on the total station, theodolite, GPS and other conventional measurement methods. This method tends to monitor the changes of some specific points or local areas. For objects with large shape changes, the extent of damage cannot be accurately grasped and analyzed, which has obvious disadvantages and cannot provide a scientific basis.
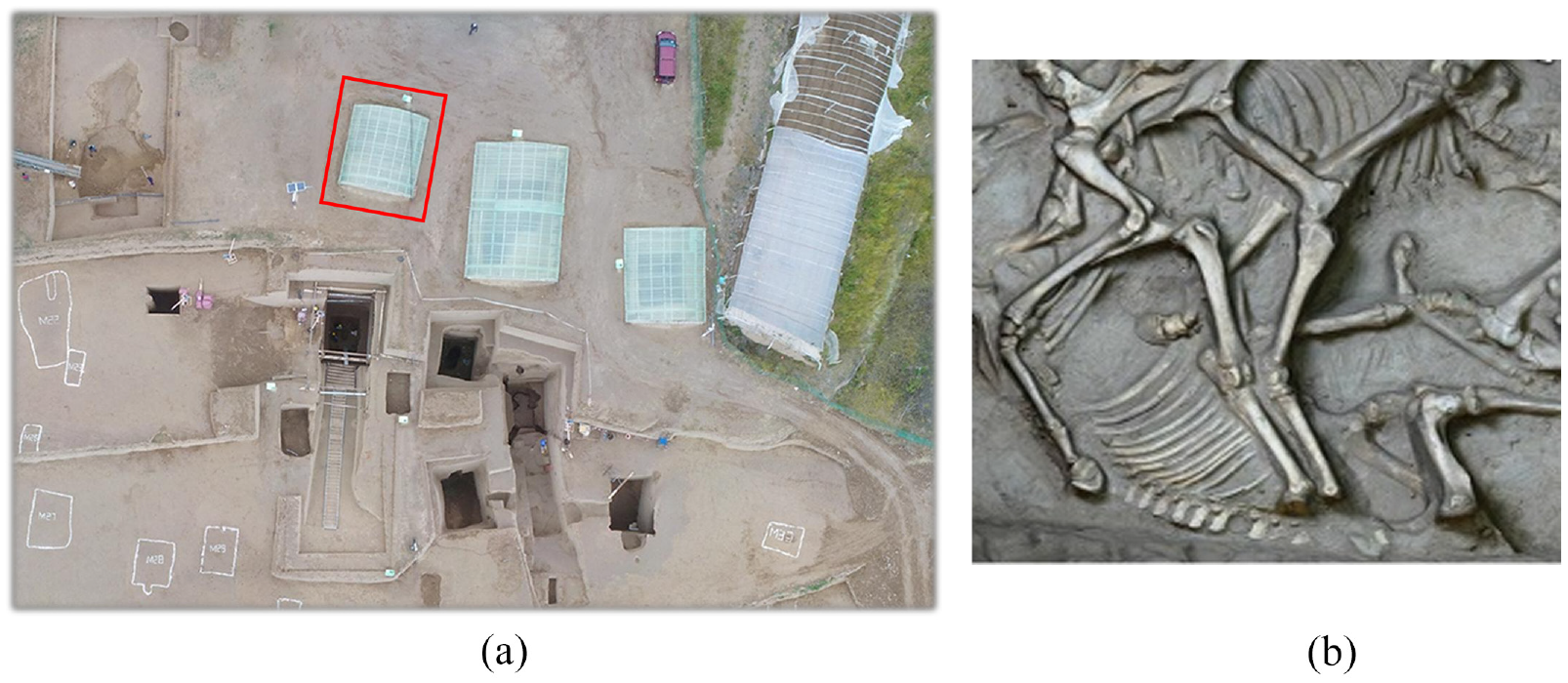
Figure 15 shows the pottery workshop in the site. With the help of a high-precision model, comprehensive morphological and texture information of the burial site can be obtained, and the obtained data can be fused and compared in multiple periods to fully analyze the damage situation, the effect results of which is shown in Figure 16. At the same time, the true color model can also be used to monitor minor diseases, check the cracks, color shedding and other undesirable conditions of the cultural relics.

Pottery workshop image.
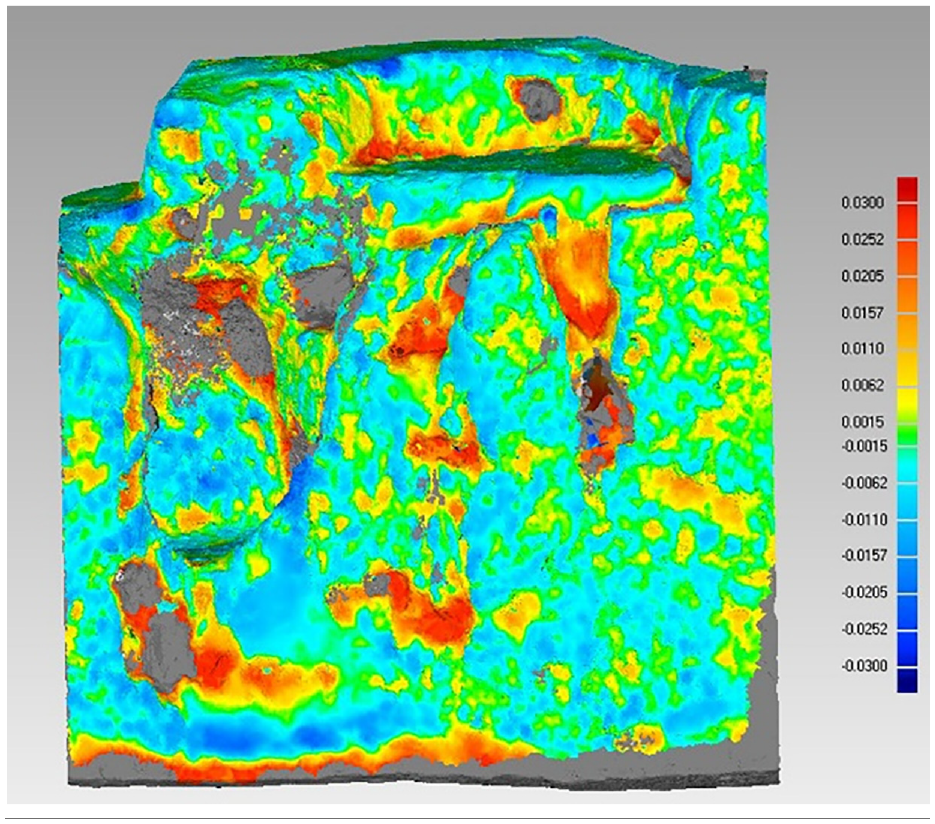
Comparison of two periods of data.
The protection method of multi-source data fusion can also perform virtual restoration of burial cultural heritage, preserving it digitally, and restoring its real state with mathematical geometry, intelligent processing and virtual display methods enable its digital inherited.
Conclusion
Comprehensive utilization of control measurement, LiDAR and digital photogrammetry technological know-how such as data acquisition tombs, solved the trouble of missing data from a single sensor, improves the data fineness, proposes a multi-constrained global registration algorithm with joint point, line and surface features to improve the accuracy and efficiency of alignment, and uses SFM-based image dense point cloud generation algorithm to complete the 3D reconstruction of UAV surveys and close-range photogrammetry 3D reconstruction of the image. Through the fusion of multi-source data under the unified coordinate datum of the high precision 3D models of the burial site, the basic measuring and monitoring analysis, and the independent preparation of the orthophoto generation system, automatically generated by point cloud data, a more intuitive display of the current situation of the burial, which is conducive to grasp the structure and basic information of the burial. It provides the basic data for the protection of burial sites and serves for the protection of the cultural heritage of the burial category.
In addition, there are a large number of fragments in the excavation of burial cultural heritage. The restoration of these fragments requires a lot of work, such as recording, numbering, drawing and comparison, which is quite a tedious process, and it is difficult to determine the relative relationship between fragments with complex shapes. According to the characteristics of the fragment contour line, thickness, characteristic surface and so on, the point cloud data is used to extract the fragment contour line, and the nearest point iteration method is used to match the fragments, which is expected to realize the automatic extraction and restoration of cultural relics and promote the digital protection of burial cultural heritage. Ruijgrok’s research shows that the economic benefits of conserving the most threatened types of cultural heritage surpass the costs. Conservation is a sound investment, 28 we hope that our research results can be helpful to the protection of world cultural heritage.
Supplemental Material
sj-zip-1-mac-10.1177_00202940221110949 – Supplemental material for 3D Digital protection and representation of burial ruins based on LiDAR and UAV survey
Supplemental material, sj-zip-1-mac-10.1177_00202940221110949 for 3D Digital protection and representation of burial ruins based on LiDAR and UAV survey by Ming Guo, Zexin Fu, Deng Pan, Yuquan Zhou, Ming Huang and Kecai Guo in Measurement and Control
Footnotes
Acknowledgements
We want to thanks the reviewers for careful reading of the manuscript and their constructive remarks.
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This research was funded by the National Natural Science Foundation of China [grant number 41971350, 42171416, 52130809]; Beijing Advanced Innovation Centre for Future Urban Design Project [grant number UDC2019031724]; Teacher Support Program for Pyramid Talent Training Project of Beijing University of Civil Engineering and Architecture [grant number JDJQ20200307];
Supplemental material
Supplemental material for this article is available online.
References
Supplementary Material
Please find the following supplemental material available below.
For Open Access articles published under a Creative Commons License, all supplemental material carries the same license as the article it is associated with.
For non-Open Access articles published, all supplemental material carries a non-exclusive license, and permission requests for re-use of supplemental material or any part of supplemental material shall be sent directly to the copyright owner as specified in the copyright notice associated with the article.