
Abstract
This paper presents an adaptive neural network controller based on a disturbance observer to compensate the disturbance caused by neural network approximation for a class of unknown nonlinear systems. The proposed adaptive neural network control with an updated parameters mechanism is not subject to the restriction of compact set assumption for satisfying the universal approximation property. The neural network approximation error can be compensated online through the proposed disturbance observer. The proposed method eliminates the need to obtain an exact system model before applying the ideal controller. The effectiveness of the proposed method is validated by numerical simulations.
Introduction
Due to its universal approximation property, neural network control has been playing a very important role in the control community, especially for unknown nonlinear systems. With traditional control methods, the control algorithms are designed based on a system model to achieve stable tracking control. As the controlled objects become increasingly complex, it is usually impossible to obtain an accurate system model.1–3
In recent years, many different neural network control methods have been proposed for a variety of unknown nonlinear systems.4–9 These methods are implemented by an adaptive NN control strategy to compensate the uncertainties of the system and the external environment. A neural network controller was designed for an uncertain n-link robot with full-state constraints, and a barrier Lyapunov function was presented to guarantee uniform ultimate boundedness. 8 A radial basis function neural network (RBFNN) was utilized as the prediction function for nonlinear model predictive control, with system stability guaranteed and network-induced delays and packet dropouts compensated. 9
The compact set assumption is considered an important assumption in neural network control. In order for the assumption to be effective, the state variables of the system must be in a compact set range.10,11 However, in the online control of nonlinear systems, it is often impossible to prove that the state of the system satisfies the compact set assumption. Therefore, in adaptive neural network control, the compact set assumption is not quite a feasible way to establish a stable control algorithm. In fact, the approximation error of the system can be seen as an unknown disturbance signal, which can change with time and the system state. This disturbance can be eliminated using a disturbance observer. To estimate the unknown disturbance and keep the system stable, it is important to add a control variable based on disturbance rejection, such as active disturbance rejection control and disturbance observer-based control, to the control loop. Several discrete-time variants of active disturbance rejection control have been studied and have found an increasingly wide range of applications, especially in power electronics and drives. 12 In Sira-Ramirez et al., 13 an active disturbance rejection control scheme for the angular velocity trajectory tracking task was proposed for a substantially perturbed, uncertain, and permanent magnet synchronous motor. The use of a disturbance observer for disturbance compensation offers improved robustness and has therefore been extensively investigated by many researchers.14–16 Disturbance observer-based control has been well studied in both linear systems and nonlinear systems. For example, in Komada et al., 17 a disturbance observer was used for a manipulator control with no inverse dynamics. In Chen and Ge, 15 a disturbance observer was designed to compensate unknown external disturbance, unknown nonsymmetric input saturation, and the approximation error of the neural network for a class of uncertain nonaffine nonlinear systems. Disturbance observer-based control methods have also been applied in power electronics.18,19
In this paper, we release the compact set assumption to design an online neural network controller, and use a disturbance observer to deal with the approximation error of the system. First, we give a state-dependent upper bound assumption that can reflect the error between the neural network and the nonlinear system. Second, we apply the proposed approximation and a disturbance observer in the control method to compensate the approximation error without compact set assumption. Finally, we establish a backstepping-based adaptive neural network control algorithm with updated parameters for the high-order nonlinear system. The control scheme keeps the tracking error in a bounded function which depends on the initial state of the system.
The remainder of the paper is organized as follows. Section 2 formulates the control problem. Section 3 presents an adaptive neural network controller based on a disturbance observer. Some simulation examples are given in Section 4 to illustrate our theories. Concluding remarks are included in Section 5.
System description and problem formulation
To develop the proposed disturbance observer-based adaptive neural network controller, the control problem and system function approximation with a neural network are formulated as follows.
Problem formulation
We consider a class of uncertain SISO nonlinear systems, which can be described as
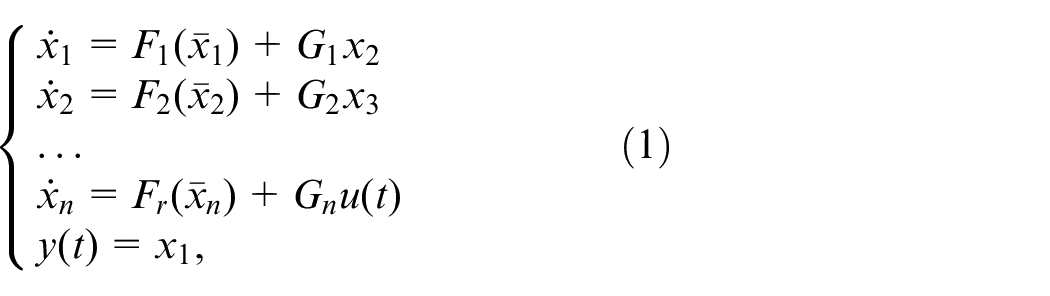
where
Therefore, the problem of this paper can be presented to design a control input
Neural network function approximation
Universal approximation theorem
20
expounds that any continuous function can be approximated by an ideal RBFNN over a compact set. Therefore, the continuous function

where

where

where
When

where
When a neural network is used in the control field, the compact set assumption must be met. This assumption requires that all input signals of the neural network be in a compact set, which is a difficult thing to achieve in the online control process. The above assumption depends on the system state without requiring boundedness of the neural network input, which has better practicability. 21
Adaptive neural network controller with disturbance observer
The objective of this section is to design a adaptive neural controller which can promise the stability of the system. First, we assume that complete information about all the states are available, a model-based control with a low-frequency learning neural network is introduced to maintain the system’s performance. Then, a nonlinear disturbance observer is introduced based on the proposed adaptive neural network control method.
Adaptive neural network controller
We define new error variables
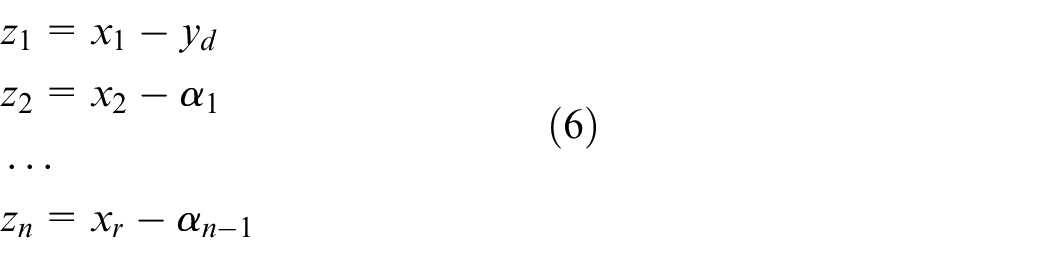
where
Now we summarize how a basic adaptive backstepping controller with a low-frequency learning neural network is designed through a standard recursive procedure.
Step 1.
Based on RBFNN approximation (4), let

The virtual control

where
Now we design

where

where
The derivative of
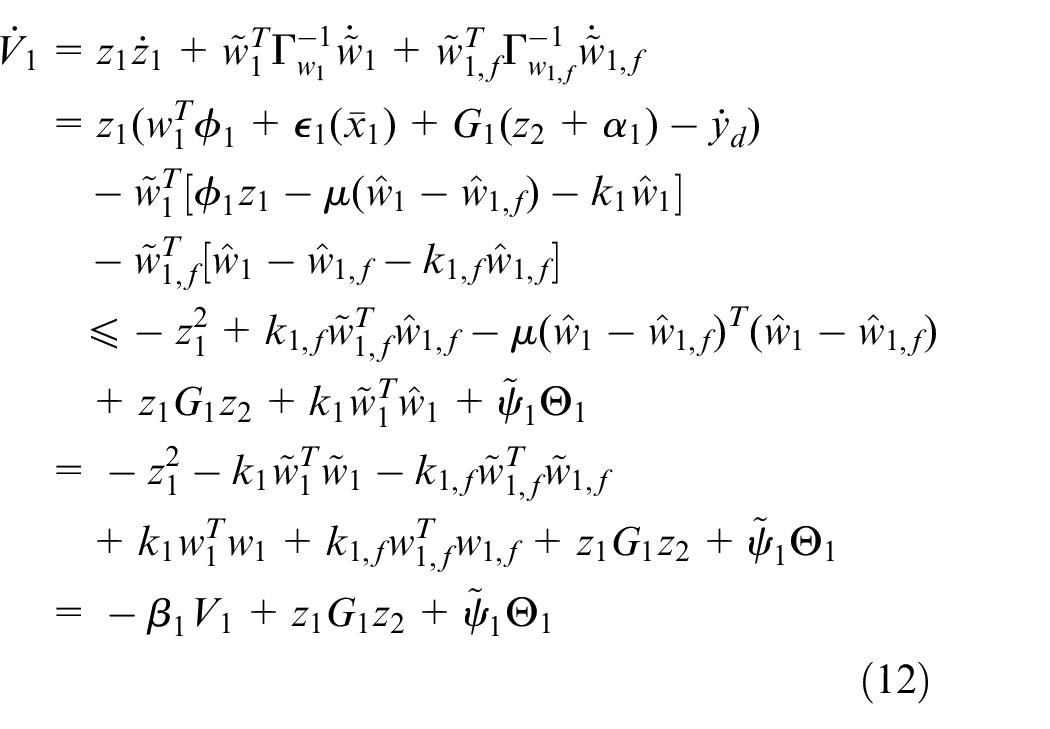
where
Step j.
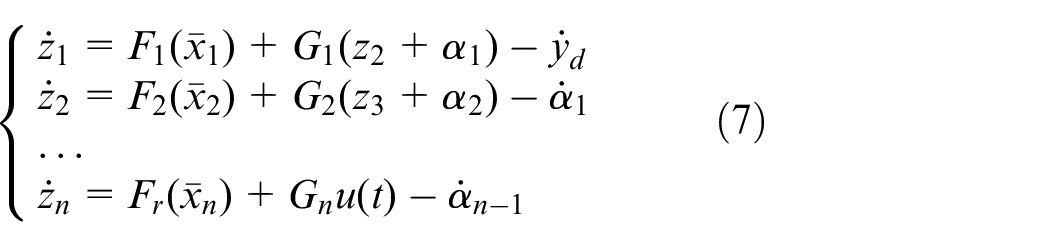
From (6) and (19), we have


where

In the

where

where

Choose the following virtual control law

where
Step n. In the last step, we choose the Lyapunov function as
with



where

where

where

Now we have finished designing the adaptive neural control for uncertain nonlinear systems with neural network approximation assumption. A disturbance observer for eliminating the disturbance item
Nonlinear disturbance observer
Using the same step-by-step method as in the previous section, we now design a disturbance observer.
Step 1.
A nonlinear disturbance observer is designed to estimate the unknown disturbances


where

Then we have
Consider a new Lyapunov function candidate

Then the time derivative of
where

where
Step j.
As is done in the backstepping process, the Lyapunov function is chosen as

with disturbance observers


By selecting the appropriate

with

we can get

Step
Consider the following Lyapunov function candidate

and disturbance observers


Choose

The time derivative of V3 is

where
To summarize, the following theorem for disturbance-observer-based controller can be obtained,
Simulation examples
In this section, the proposed adaptive neural network controller with a disturbance observer is used for tracking control of rigid robots. As covered in Lewis et al., 23 the rigid robot model can be defined as
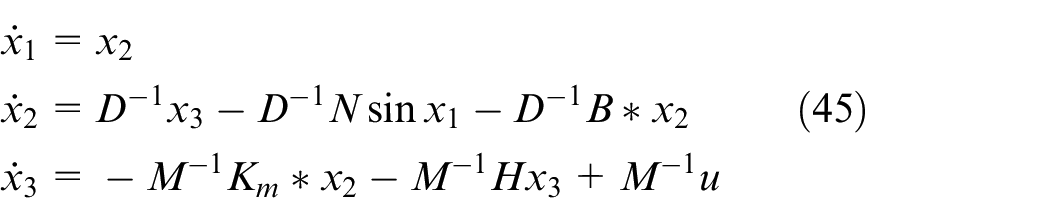
where
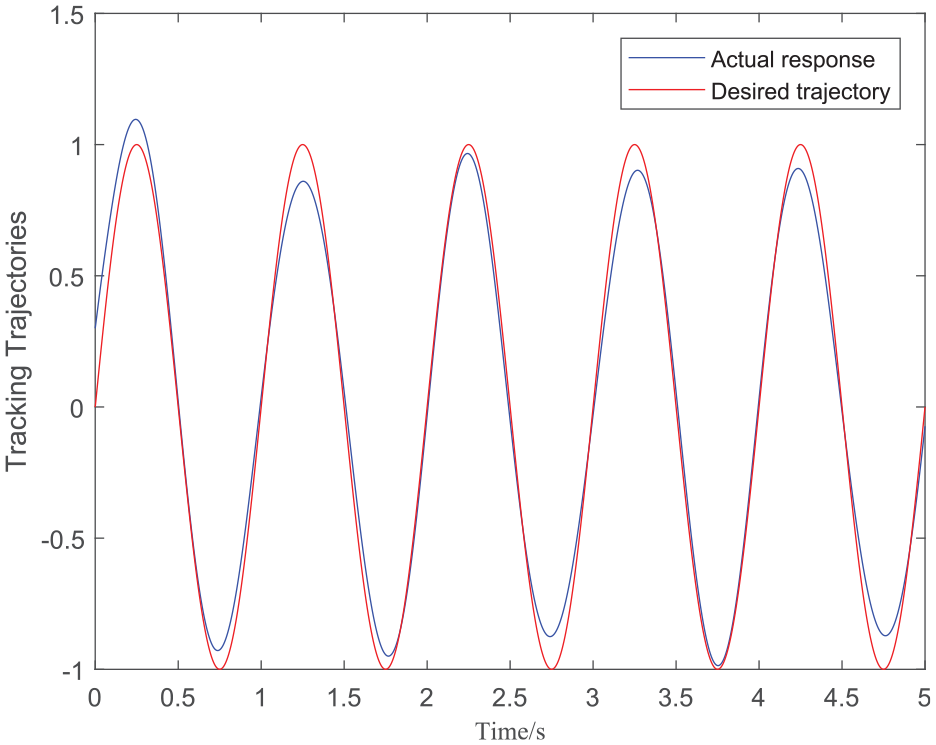
The desired trajectory is
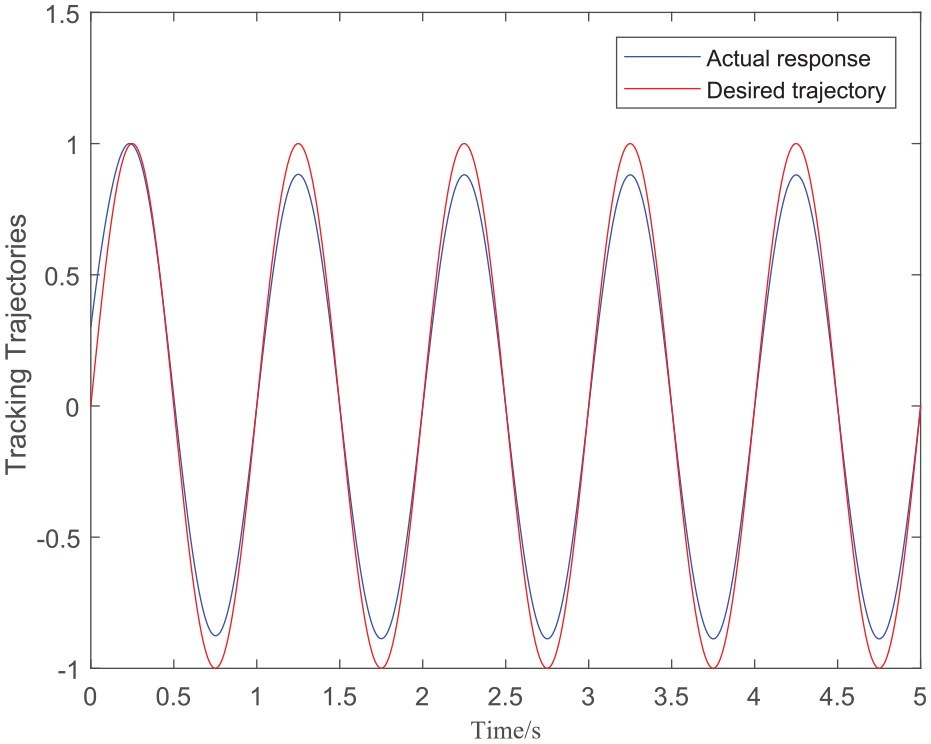
Tracking trajectories.
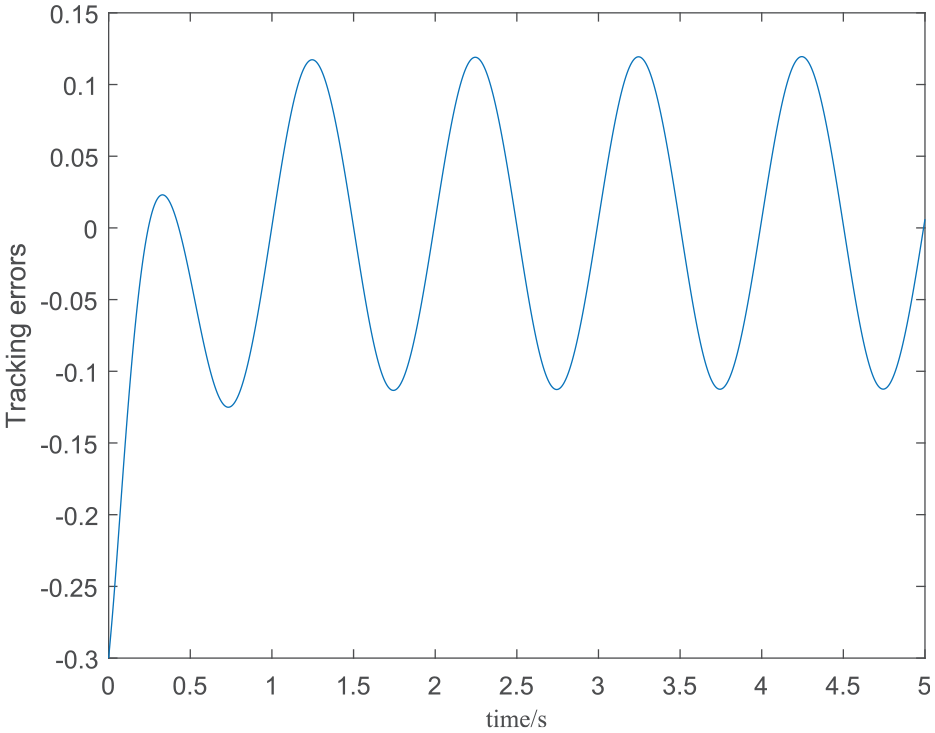
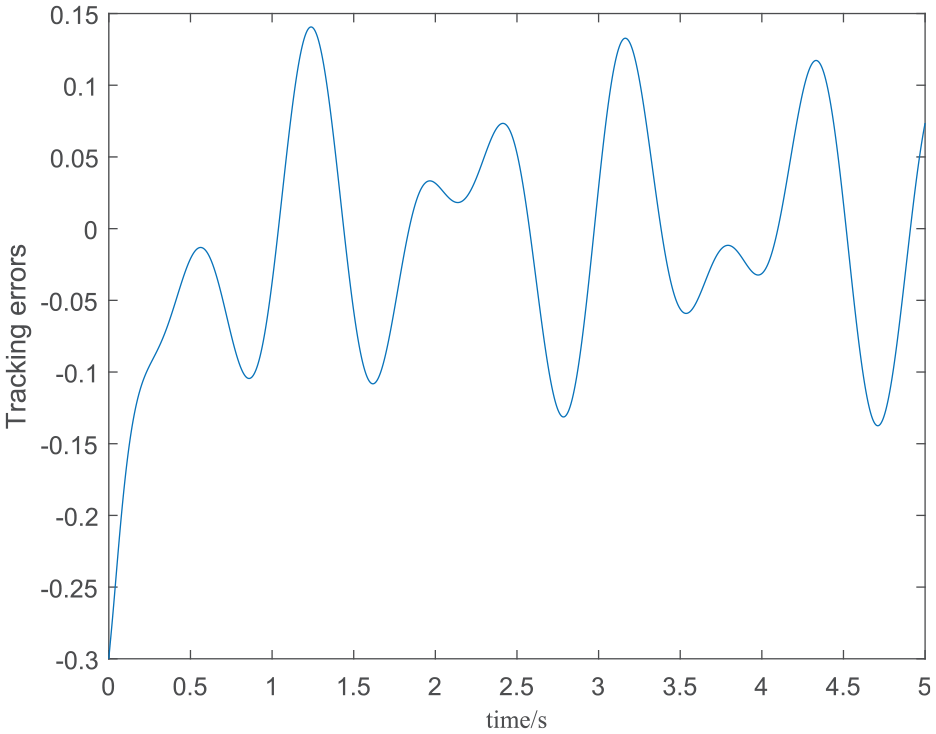
Tracking errors.
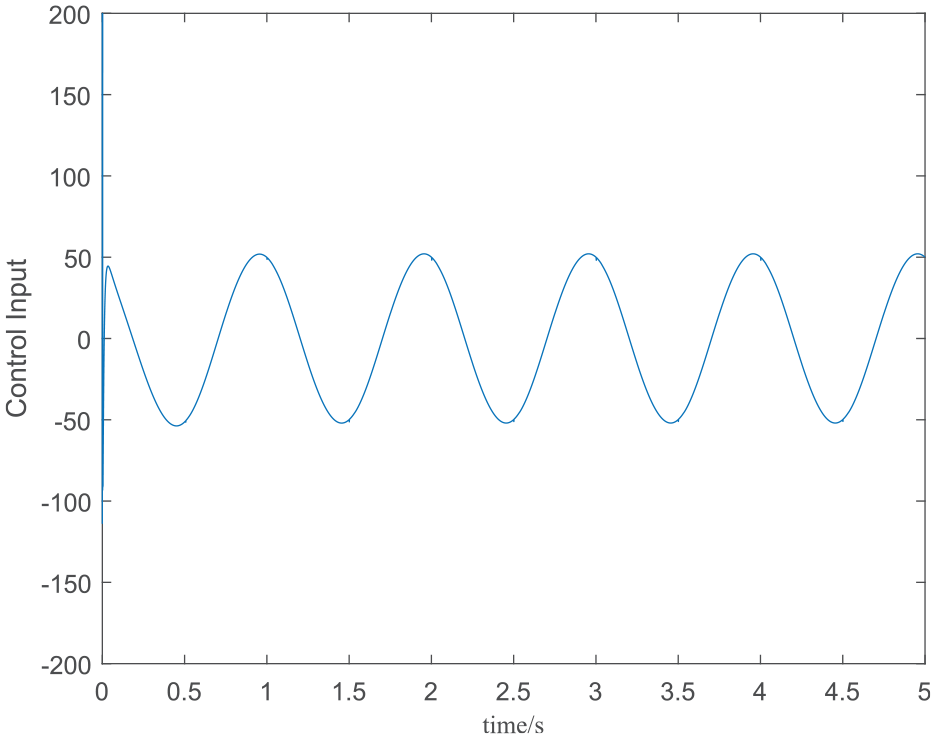
Tracking trajectory.
In order to show the robustness performance of the proposed controller and observer, we can add an disturbance term to the system (46) as follows:
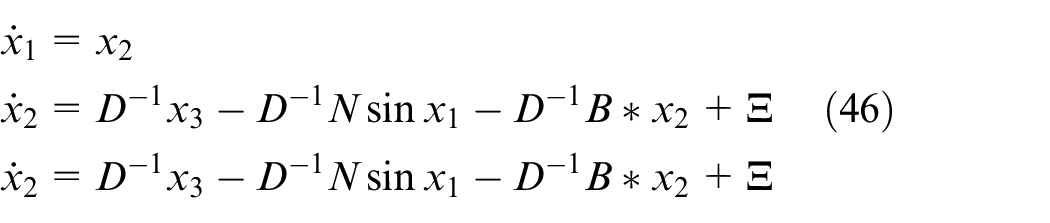
where
Tracking trajectory.
Tracking trajectory.
Conclusions
In this paper, we propose a disturbance observer-based adaptive neural network control for unknown nonlinear systems. A disturbance observer is introduced to deal with neural network approximation errors which are traditionally assumed to be bounded. The compact set assumption is released and replaced by system state-based error assumption. An adaptive neural network with updated parameters is designed to control the system and the disturbance observer is used to compensate the approximation error. It is demonstrated in the simulation section that the proposed method can guarantee system stability and save communication resources of the system. Although we have verified the effectiveness of the proposed method through simulation, we still face many problems in complex and changeable practical application which lead us to apply the algorithm to practical objects.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) received no financial support for the research, authorship, and/or publication of this article.