This study investigates finite-time energy-to-peak control for pure-time-delay Markov jump systems. The main objective is to obtain some theorems such that the corresponding pure-time-delay Markov jump systems are finite time energy-to-peak stable or stabilizable. First, based on mathematical transformation, the pure-time-delay Markov jump systems are described in a model description that includes the current system state and several distributed time-delay items. Second, according to linear matrix inequality (LMI) theory, a positive energy functional is constructed, which includes a triple integral item. Then, after some mathematical operations, some sufficient conditions are obtained for Markov jump systems to be finite-time energy-to-peak stable or stabilizable. The obtained results are expressed in LMIs, which can be conveniently solved by computers. Finally, examples are given to show the usefulness of the obtained theorems.
Because signal transmission and processing need to consume time, time delays almost exist in all real systems. If some of those time delays are not considered properly during system analysis or synthesis, the system may be performance-decreased or destroyed. In order to decrease the influence of time delays on system performance, many efforts have been made by scholars in recent years, and some achievements were gotten, for example, Sun et al.1 demonstrated the global stability of the joint space of an excavator by applying a time-delay system control method. By using a time delay estimation algorithm, Mazare et al.2 proposed a method to design a fault-tolerant controller for a variable-speed wind turbine. By solving some special mathematical equations, Hu and Lü3 designed a time-delay system control strategy for multi-DOF systems with strongly nonlinear characters. Additional results can be found in references.4–6 However, there is a class of special time-delay systems, called pure time delay systems (PTDSs), which exists in many engineering fields. Compared with regular time delay systems, PTDSs have no current state items. Thus, the system analysis and synthesis methods used for regular time delay systems cannot be applied to PTDSs directly, and trying to obtain some results for PTDSs is necessary and meaningful. Fortunately, during the past several years, some scholars have done some works on this issue. For example, Elshenhab and Wang7 considered linear fractional systems with pure time delay in reference, and the solutions of the corresponding systems were obtained by using some delay-based matrix functions and system transform. Liu et al.8 presented some exact solutions for a pure delay fractional equation, and some conditions were obtained for the system to be stable. More achievements in this issue can be found in references.9–11 However, LMI-based achievements regarding pure time delay systems are still few, and obtaining some LMI-based results for PTDSs is still required.
The literature first mentioned about LMI dates back to 100 years ago.12 Lyapunov proposed some stability theorems for differential equations in 1890. Then, the Lyapunov stability theorems were applied to some classical control problems in the 1940s by Lur’e et al., and the embryonic form of the LMI was formed. In the following years, based on the scholars’ efforts, the LMI technique was advanced greatly, and many achievements regarding the use of LMI to solve control problems were obtained; for example, Some LMI-based conditions were achieved by Basu et al.13 to solve the output regulation problem of a linear regular system. Torres-Pinzón et al.14 presented the design of an LMI-based fuzzy controller for DC-DC converters, and the theoretical predictions were verified by using a 60 W prototype. Based on the LMI technique, Hao et al.15 addressed some sufficient conditions for obtaining a fault-tolerant controller for unmanned marine vehicles. Chen et al.16 discussed the controller design of uncertain linear systems, and some LMI-based conditions were derived for the existence of sliding-mode controllers. Additional results can be found in references.17–19
On the other hand, changes in the working surroundings or breakdown of system components always exist in real systems20–23; thus, some system state jumps often occur in a real system. If these jumps are not considered correctly, the system may be performance-decreased or destroyed. It is worth mentioning that a class of jump systems, called Markov jump system (MJS), widely exists in many engineering fields. In order to deal with the Markov jump, many scholars have attempted to conduct research on this issue, and many achievements have been made in the last several decades. For example, Liu et al.24 addressed a neural network event-triggered scheme for nonlinear MJSs and some theorems that can guarantee fault sensitivity and disturbance attenuation in certain frequency ranges were derived. He et al.25 dealt with the attack defense control for MJSs, and an adaptive control technique was obtained. Shu et al.26 addressed the robust controller design for fuzzy MJSs by constructing a special energy functional. Additional results regarding MJSs can be found in references.27–30 Thus, doing a system control for pure time-delay systems with system state jumps considered is also necessary.
It is well known that the energy-to-peak control, as a type of disturbance-resist control method, is widely used in many control engineering fields to constrain the influence of unexpected disturbances on the system. For pure time-delay MJSs, a controller design with the disturbance-resist performance considered is also necessary. During the past several decades, many results about energy-to-peak control also have been achieved. For example, Xie et al.32 studied the energy-to-peak control for the actuator-saturated time-varying systems, and a heuristic-algorithm-based condition was derived. Chang et al.33 studied the filter design for a class of singular systems by using energy-to-peak control methods. Additional results can be found in references.34–36 Furthermore, it is often that the peak responses of the system states destroy the corresponding system. Thus, doing a system control design with the maximum state response constrained is necessary and important. Fortunately, Russian literature37 introduced a control method, called finite-time stability (FTS), which can constrain systems’ states in a given domain in a certain time interval. During the past several decades, some results regarding FTS have also been achieved; for example, Yang et al.38 discussed the FTS of neural network systems with proportional delay, and a less conservative criterion was obtained. Feng et al.39 considered the input-output FTS for a type of switched system, and some sufficient theorems were obtained for the system. The readers can refer to references40–42 for more results about FTS. Thus, if the FTS is introduced in the control of MJSs with PTD, some improved performances can be expected to be obtained.
This study mainly considered the finite-time energy-to-peak control for a class of Markov jump PTDSs. The main contributions include the following aspects: (1) by using the system transformation, the Markov jump PTDSs are described with some current state items and distributed time-delay items; (2) based on a functional candidate and some mathematical operations, some LMI-based theorems are obtained for the Markov jump PTDSs to be FTS with the energy-to-peak performance; (3) If the Markov jump PTDS is unstable, some stabilizing controllers can be obtained by using the obtained theorems, and the finite-time energy-to-peak stability of the controlled system is guaranteed. Moreover, to further illustrate the usefulness of the theorems obtained in this paper, some examples are provided in the end.
Dynamic models
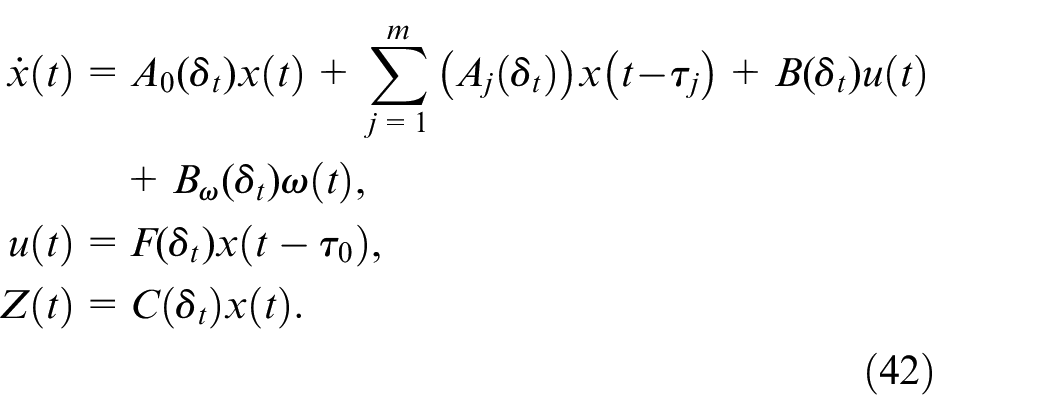
We consider the Markov jump PTDSs:
where is the system state with delay time ; is the system control input; represents the external disturbance; , , , and are the system matrices. is a Markov process parameter, which takes values in the space . Then, we use the matrix to denote the system transition, and is the transition rate, which has for , and . Then, we have , , and .
Assume that delay time within the control channel is . Then, the controller is described as
where is the controller gain. Based on the transformation , system (1) and controller (2) can be expressed as
We use the index to denote the current model, then, , , , , and are denoted by , , , , and , respectively.
The focus of this paper is to obtain some conditions such that system (1) satisfies: (i) When , system (1) is FTS. (ii) Under 0 initial conditions , system (1) has the performance for all nonzero .
Definition 1. It is said that the system (1) is finite-time energy-to-peak stable in regard to , if the system has
for any , , where , ,, ,, .
Definition 2. It is said that the system (1) is finite-time energy-to-peak stabilizable in regard to , if there exists a controller gain such that the controlled system is finite-time energy-to-peak stable.
Lemma 119: If there are any matrix , any scalars , , , and a function , then .
Lemma 243: If there are a matrix , and an integrable function , then
where .
Lemma 344: Let be a nonnegative function such that for some constants , then, we have .
Main results
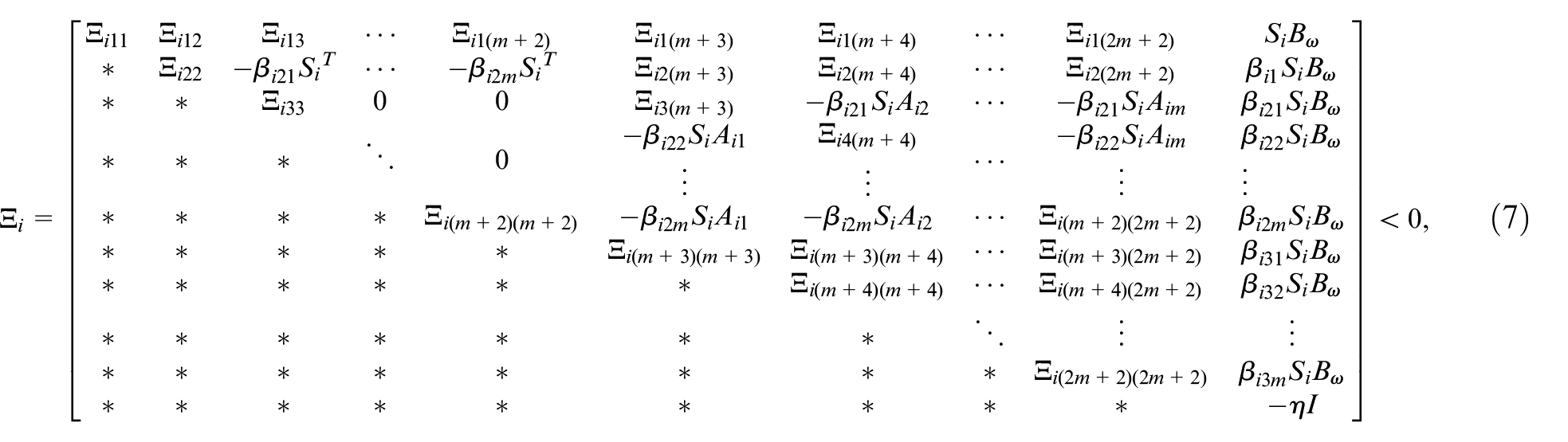
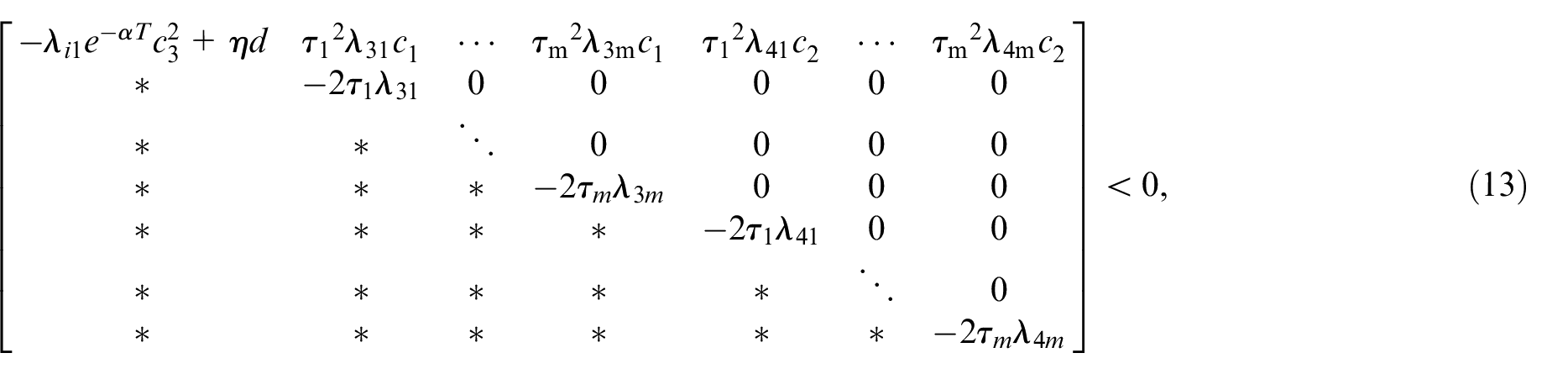
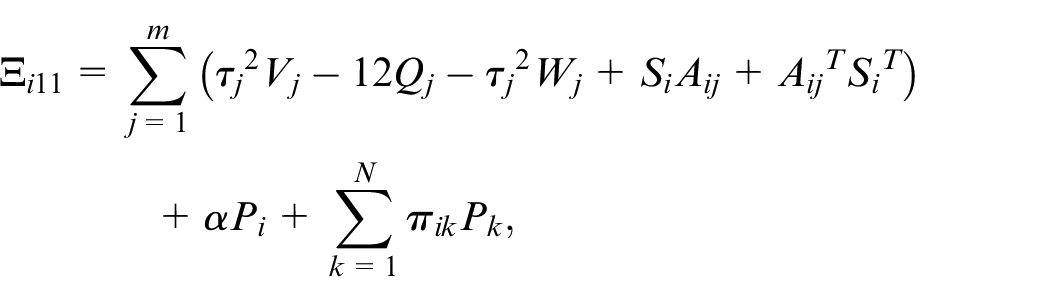
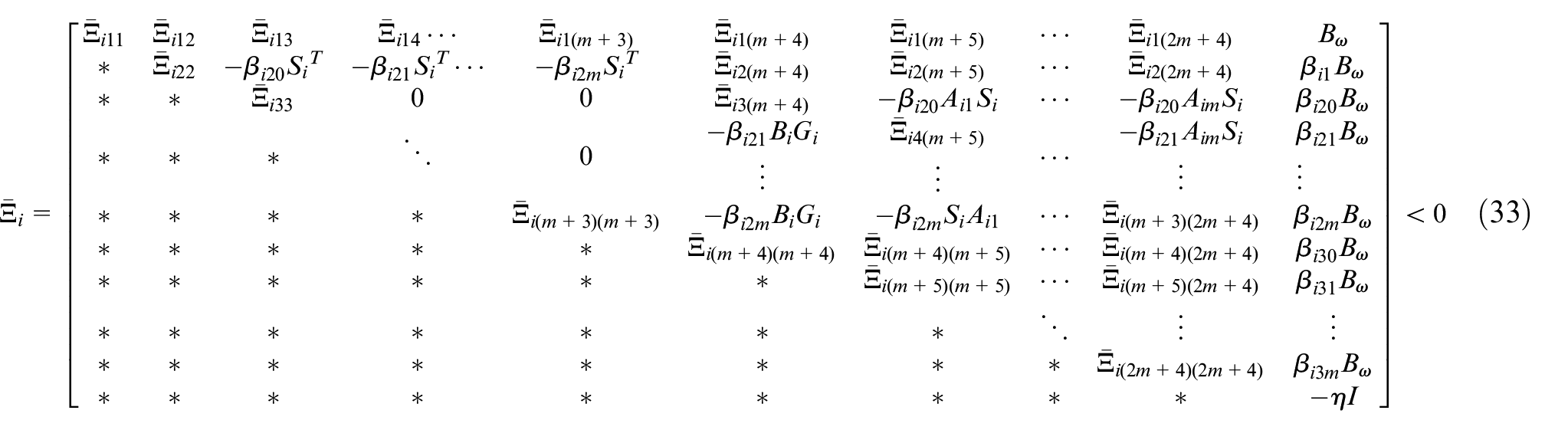
Theorem 1: There are delay times and constant such that the system (1) is finite-time energy-to-peak stable with respect to , if there are any matrices , , , , matrix , and scalars , , , , , , , , satisfying the following LMIs
where
Proof: Choose a suitable functional candidate as
where
and , , . By using the weak infinitesimal generator ℑ, we have
Furthermore, based on Lemma 1, the following equations can be gotten:
By utilizing Lemma 2, the following Eq. (21) is obtained.
where . Considering the open-loop form of system (1), we can get the following Eq. (22) by setting .
where is a suitable matrix, , , and are constants. By combining the equations (16)–(22), the following Eq. (23) can be obtained.
where ⋯. Based on LMI (7), it is easy to obtain
By doing an integration on both sides of (24) from 0 to t, , we get
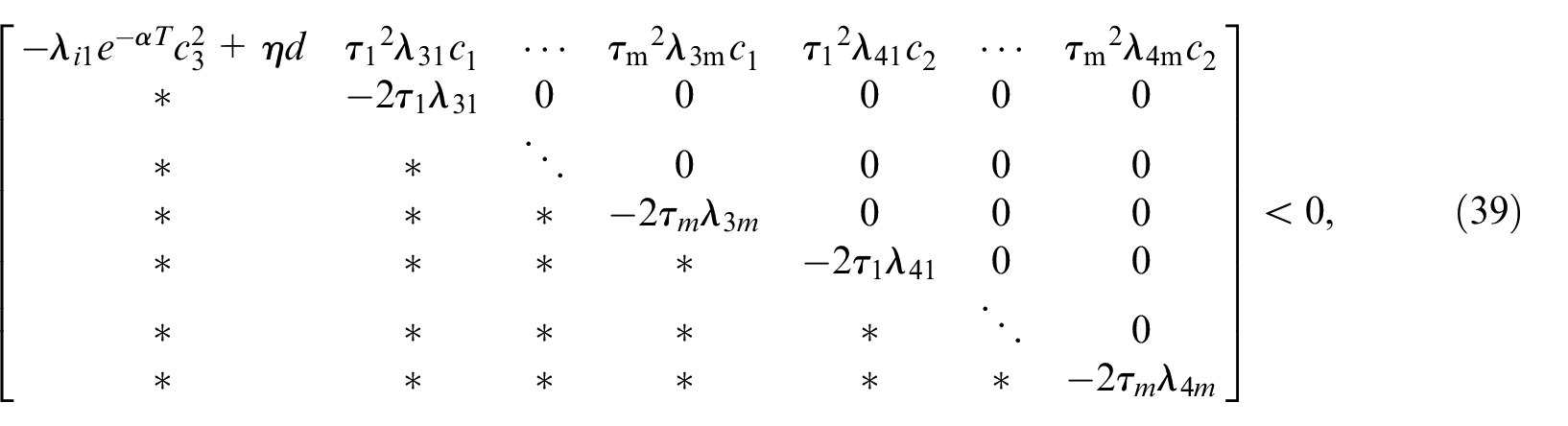
By considering the conditions (8)−(13), we can obtain . Then, we consider the system under 0 initial conditions . By doing an integration on both sides of (24) from 0 to t, , we obtain the following equation (32) by Lemma 2.
that is, . According to Definition 1, we have system (1) is finite-time energy-to-peak stable.
Theorem 2: There are delay times and constant such that the system (1) is finite-time energy-to-peak stabilizable in regard to , if there are any matrices , , , , matrix , and scalars , , , , , , , , satisfying the following LMIs
where
Then, a controller gain can be obtained by .
Proof: By replacing equations (14) and (22) with the following equations (40) and (41), respectively, and pre- and post-multiplying (33) and (34) with , and their transpose, respectively, Then, Theorem 2 can be obtained by doing a similar operation with Theorem 1.
where
and , , , .
Remark 1: It is worth pointing out while we solve the Theorems 1 and 2, there are several parameters needed to be given ahead. The values of the parameters and can be gotten based on the initial conditions of the corresponding system. The value of is given according to the state-constraint requirements, and we can choose . is a given upper bound of the time interval, in which, the system is finite time stable. is the gain from the energy of the disturbance to the peak response of the controlled output. Furthermore, the scalars , , , and supply an additional degree of freedom for solving of the Theorems 1 and 2. Some optimization theories (such as neural network and GA etc.) can be used to optimize the scalars , , , and , and get the feasible results of Theorems 1 and 2.
Remark 2. If Theorem 1 or 2 is solvable, we can obtain the FTS and energy-to-peak performance of system (1). However, while a time-delay system includes current states (see Eq. (42)), Theorems 1 and 2 are unfit because the current states are not considered. Fortunately, we can extend Theorems 1 or 2 to Theorems 3 and 4, which can be used to solve the problem of system analysis and control of the regular time-delay system shown by equation (42).
By replacing the in system (1) with , we can obtain Theorems 3 and 4 from Theorems 1 and 2 to stabilize the system (42).
Theorem 3. There are delay times and constant such that the system (42) is finite-time energy-to-peak stable in regard to , if there are any matrices , , , , matrix and scalars , , , , , , , , satisfying the following LMI (43) and LMIs (8)−(13).
where
Theorem 4. For those delay times and constant , system (42) is finite-time energy-to-peak stabilizable with respect to , if there are any matrices , , , , matrix , and scalars , , , , , , , , satisfying the following LMI(44) and LMIs (34)−(39).
where
Then, a controller gain can be obtained by .
Remark 3: Theorems 3 and 4 provide the conditions for regular time delay systems to be stable. However, it is worth pointing out that if we choose in Theorems 3 and 4, Theorems 3 and 4 will also be fit for a pure time delay system. However, those achievements obtained in references45,46 cannot be used to analyze those MJSs with PTD. Thus, compared with the existing achievements shown in references,45,46 Theorems 3 and 4 are more general. On the other hand, Theorems 1–4 are obtained by finite-time stability theory, which are more relaxed than the Lyapunov stability theory. This is also shown by the example in Part 4.
Illustrative Example
Example 1. There is a two subsystems’ MJS, which has
mode 1.1: ,
mode 1.2: .
This system was considered by Li et al.49 Reference47 showed that when , the maximum value of is 0.352, the maximum values of in references36,48–50 are , , , and , respectively. However, by setting , , , and , we can obtain the maximum by Theorem 3 in this study. Some more comparisons are given in Table 1, and the maximum values of obtained in this study are much higher than those obtained in references,36,47–50 moreover, we can obtain a satisfactory result by tuning the value of . In other words, the results obtained in this study are less conservative than those in references.36,47–50
Example 2. We Consider the following MJS with PTD:
The maximum values of obtained in different references.
Furthermore, and . We assume the transition rate matrix . Because the subsystems 2.1 and 2.2 both have no current state, theorems in the references31,43–45 cannot deal with this MJS. Assume this MJS is under zero initial condition, and a disturbance signal (see Figure 1: EI Centro 1940 earthquake excitation), is introduced to this MJS. This excitation has , thus, it can be chosen that . Under this excitation, the responses of and are given in Figures 2 and 3, respectively, which clearly indicate that this MJS under is unstable.
Disturbance signal: EI Centro 1940 earthquake excitation.
One possible mode.
The state responses of the uncontrolled MJS.
Then, we choose , , , , , , , , , and s, solve Theorem 2, and obtain a finite-time stability controller that has
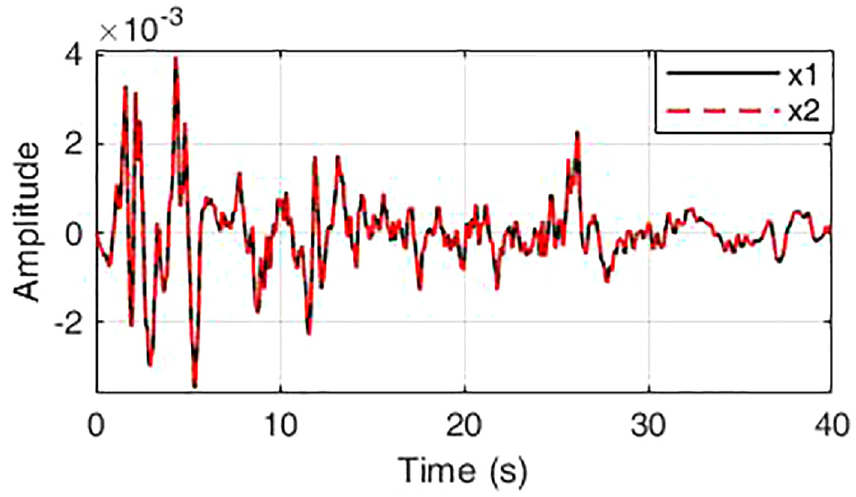
Then, we consider of the MJS controlled by the controller shown in equation (45). The MJS is under zero initial condition, and excited by the disturbance signal shown in Figure 1. After doing a simulation by computer, the system state responses are given in Figure 4, and has the same values as that given in Figure 2. From Figures 1 and 4, it is obtained that and . Then, we have , that is, is satisfied for the controlled MJS.
The state responses of the controlled MJS.
Conclusions
In this study, the finite-time energy-to-peak control of MJSs with PTD is discussed. First, by utilizing mathematical transformation, the MJSs with PTD are described in a system description with the current state and some distributed time delay items. Second, based on a suitable functional candidate that includes a triple integral item and according to the finite-time stability theory, some finite-time energy-to-peak stability criteria are gotten for the MJSs with PTD. If these criteria are solvable, the corresponding system can be ensured to be finite-time energy-to-peak stable. Finally, some examples are given to illustrate the usefulness of the obtained methods.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work is supported by Jiangxi Provincial Natural Science Foundation (Grant No. 20202BABL202011), and the National Natural Science Foundation (Grant Nos. 72164016 and 61763015) of China.
ORCID iD
Falu Weng
References
1.
SunDHwangSHanJ.Lever control for position control of a typical excavator in joint space using a time delay control method. J Intell Robot Syst2021; 102(3): 63.
2.
MazareMTaghizadehMGhaf-GhanbariP.Fault tolerant control of wind turbines with simultaneous actuator and sensor faults using adaptive time delay control. Renew Energy2021; 174(C): 86–101.
3.
HuRLüQ.Optimal time-delay control for multi-degree-of-freedom nonlinear systems excited by harmonic and wide-band noises. Int J Struct Stab Dyn2021; 21: 4–2150053.
4.
GuDKSunLSLiuYD.Parametric design to reduced-order functional observer for linear time-varying systems. Meas Control2021; 54: 1186–1198.
5.
LiYJiaLJiY, et al. Event-triggered guaranteed cost control of time-varying delayed fuzzy systems with limited communication. Meas Control2020; 53(9–10): 2129–2136.
6.
QiNZhangCYuanJ.Observer based sliding mode control for subsonic piezo-composite plate involving time varying measurement delay. Meas Control2021; 54(5–6): 983–993.
7.
ElshenhabAMWangXT.Representation of solutions for linear fractional systems with pure delay and multiple delays. Math Methods Appl Sci2021; 44: 12835–12850. DOI: 10.1002/mma.7585
8.
LiuLDongQLiG.Exact solutions and Hyers–Ulam stability for fractional oscillation equations with pure delay. Appl Math Lett2021; 112(1): 106666.
9.
WangRPPiYG.Fractional order proportional and derivative controller design for second-order systems with pure time-delay. In: IEEE International Conference on Mechatronic Science, 19-22 Aug. 2011, pp.1321–1325. Jilin, China: IEEE.
10.
EnokidaRStotenDKajiwaraK.Stability analysis and comparative experimentation for two substructuring schemes, with a pure time delay in the actuation system. J Sound Vib2015; 346(23): 1–16.
11.
EnokidaR.Stability of nonlinear signal-based control for nonlinear structural systems with a pure time delay. Struct Control Health Monit2019; 26(8): e2365.
12.
BoydSEl GhaouiLFeronE, et al. Linear matrix inequalities in system and control theory. Soc Industr Appl Math1994; 7–36.
13.
BasuHFerranteFYoonSY. Output Regulation of Linear Aperiodic Sampled-Data Systems. 2022. DOI: 10.48550/arXiv.2101.04662.
14.
Torres-PinzónCAParedes-MadridLFlores-BahamondeF, et al. LMI-fuzzy control design for non-minimum-phase DC-DC converters: an application for output regulation. Appl Sci2021; 11(5): 2286.
15.
HaoLYYuYLiTS, et al. Quantized output-feedback control for unmanned marine vehicles with thruster faults via sliding-mode technique. IEEE Trans Cybern2021; 1–14. DOI: 10.1109/tcyb.2021.3050003
16.
ChenWHDengXZhengWX.Sliding-mode control for linear uncertain systems with impulse effects via switching gains. IEEE Trans Automatic Control2022; 67: 2044–2051.
17.
DingYWengFGengF.State-energy-constrained controller design for uncertain semi-state systems and its application in mechanical system control. Proc IMechE, Part C: J Mechanical Engineering Science2019; 233(14): 4850–4862.
18.
LiuTRGongAL.Vibration control of cantilever blade based on trailing-edge flap by restricted control input. Meas Control2021; 54(3-4): 231–242.
19.
WengFLiuMMaoW, et al. Sampled-data-based vibration control for structural systems with finite-time state constraint and sensor outage. ISA Trans2018; 79: 83–94.
20.
VaseghiBMobayenSHashemiSS, et al. Fast reaching finite time synchronization approach for chaotic systems with application in medical image encryption. IEEE Access2021; 9: 25911–25925.
21.
VaseghiBHashemiSSMobayenS, et al. Finite time chaos synchronization in time-delay channel and its application to satellite image encryption in OFDM communication systems. IEEE Access2021; 9: 21332–21344.
22.
MostafaeeJMobayenSVaseghiB, et al. Complex dynamical behaviors of a novel exponential hyper-chaotic system and its application in fast synchronization and color image encryption. Sci Prog2021; 104(1): 368504211003388–368504211004106.
23.
MobayenSVolosCKKaçarS, et al. A chaotic system with infinite number of equilibria located on an exponential curve and its chaos-based engineering application. Int J Bifurcat Chaos2018; 28(09): 1850112.
24.
LiuQDLongYParkJH, et al. Neural network-based event-triggered fault detection for nonlinear Markov jump system with frequency specifications. Nonlinear Dyn2021; 103(3): 1–17.
25.
HeHQiWKaoY.HMM-based adaptive attack-resilient control for Markov jump system and application to an aircraft model. Appl Math Comput2021; 392: 125668.
26.
ShuFLiMLiuD.Non-fragile Hϖ control for Markovian jump fuzzy systems with time-varying delays. Physica A2019; 525: 1177–1191.
27.
QiWZongGZhengWX.Adaptive event-triggered SMC for stochastic switching systems with semi-Markov process and application to boost converter circuit model. IEEE Trans Circuits Syst I Regul Pap2021; 68(2): 786–796.
28.
QiWHouYZongG, et al. Finite-time event-triggered control for semi-Markovian switching cyber-physical systems with FDI attacks and applications. IEEE Trans Circuits Syst I Regul Pap2021; 68(6): 2665–2674.
29.
YaoLWangZHuangX, et al. Stochastic sampled-data exponential synchronization of Markovian jump neural networks with time-varying delays. IEEE Transactions on Neural Networks and Learning Systems (Early Access). 2021. DOI: 10.1109/TNNLS.2021.3103958.
30.
QiWParkJHZongG, et al. Filter for positive stochastic nonlinear switching systems with phase-type semi-Markov parameters and application. IEEE Trans Syst Man Cybern Syst2022; 52: 2225–2236. http://dx.doi.org/10.1109/TSMC.2020.3049137.
31.
YaoLHuangXWangZ, et al. Passivity-based stochastic sampled-data control of Markovian jump systems via looped-functional approach. Int J Robust Nonlinear Control2021; 31(12): 5665–5679.
32.
XieXLamJFanC, et al. Energy-to-peak output tracking control of actuator saturated periodic piecewise time-varying systems with nonlinear perturbations. IEEE Trans Syst Man Cybern Syst2022; 52: 2578–2590.
33.
ChangXHQiaoMYZhaoX.Fuzzy energy-to-peak filtering for continuous-time nonlinear singular system. IEEE Trans Fuzzy Syst2022; 30: 2325–2336.
34.
ShenHLiuXXiaJ, et al. Finite-time energy-to-peak fuzzy filtering for persistent dwell-time switched nonlinear systems with unreliable links. Inf Sci2021; 579: 293–309.
35.
ZouLWangZDongH, et al. Energy-to-peak state estimation with intermittent measurement outliers: the single-output case. IEEE Trans Cybern2021; DOI: 10.1109/TCYB.2021.3057545
36.
WengFWangHDingY.Robust energy-to-peak control for Markov jump system with multiple pure time delays. Int J Model Identification Control2020; 36(2): 145–158.
37.
KamenkovG.On stability of motion over a finite interval of time. J Appl Math Mech1953; 17: 529–540.
38.
YangZZhangJHuJ, et al. New results on finite-time stability for fractional-order neural networks with proportional delay. Neurocomputing2021; 442(28): 327–336.
39.
FengTWuBWangYE, et al. Input-output finite-time stability of switched singular continuous-time systems. Int J Control Autom Syst2021; 19(5): 1828–1835.
40.
WengFDingYGeJ, et al. Finite-time vibration control of earthquake excited linear structures with input time-delay and saturation. J Low Freq Noise Vib Active Control2014; 33(3): 245–270.
41.
WuJLiXXieX.Finite-time stability for time-varying nonlinear impulsive systems. Math Meth Appl Sci2021; DOI: 10.1002/mma.7573.
42.
JiangJLiHZhaoK, et al. Finite time stability and sliding mode control for uncertain variable fractional order nonlinear systems. Adv Diff Equat2021; 127.
43.
ParkPLeeWILeeSY.Auxiliary function-based integral inequalities for quadratic functions and their applications to time-delay systems. J Franklin Inst2015; 352(4): 1378–1396.
44.
YanZZhangGWangJ.Non-fragile robust finite-time control for nonlinear stochastic itô systems using neural network. Int J Control Autom Syst2012; 10(5): 873–882.
45.
XieXLamJLiP.H∞ control problem of linear periodic piecewise time-delay systems. Int J Syst Sci2018; 49: 997–1011.
46.
NejemIBouaziziMHBouaniF.H∞ dynamic output feedback control of LPV time-delay systems via dilated linear matrix inequalities. Trans Inst Meas Contr2019; 41: 552–559.
47.
ShuZLamJXuS.Robust stabilization of Markovian delay systems with delay-dependent exponential estimates. Automatica2006; 42: 2001–2008.
48.
GaoHFeiZLamJ, et al. Further results on exponential estimates of Markovian jump systems with mode-dependent time-varying delays. IEEE Trans Automat Contr2011; 56: 223–229.
49.
LiZLiMXuY, et al. Finite-time stability and stabilization of semi-Markovian jump systems with time delay. Int J Robust Nonlinear Control2018; 28: 2064–2081.
50.
WengFHouLWeiH, et al. H-infinity fault-tolerant control for Markov jump system with actuator time delay. Eng J2022; 2022: 528–535.