
Abstract
In this paper, a Fractional-Order Duhem Model (FODuhem) is proposed to describe the rate-dependent hysteresis nonlinearity of piezoelectric actuators (PEAs). A fractional-order operator is introduced on the basis of the traditional Duhem model, and the unique nonlocal memory property of the fractional-order operator makes it possible to describe the memory effect inherent in hysteresis. A differential evolutionary algorithm was used to identify the parameters of the FODuhem model. Finally, experimental results clearly show that the FODuhem model can better describe the rate-dependent hysteresis behavior of piezoelectric actuators compared with the conventional Duhem model.
Introduction
Piezoelectric actuators are widely used in high-speed nanopositioning systems,1–3 micro-vibration isolation,4,5 and other fields because of their high accuracy, small size, and high speed, but the piezoelectric actuators present significant nonlinearity between the input voltage and output displacement and the inherent hysteresis characteristics of piezoelectric materials, which pose certain difficulties in their applications.
Many control methods have been studied to reduce the adverse effects of this nonlinear hysteresis effect, and hysteresis control can be classified into hysteresis inverse model-based control,4–6 and hysteresis inverse model-free control,7–10 depending on whether an inverse model is needed to compensate for the hysteresis. Compared to hysteresis-free inverse model control, hysteresis-based inverse model control can better reduce the hysteresis nonlinearity of PEAs. The principle is to model the hysteresis as accurately as possible and then compensate the control system by the inverse of the model, which makes hysteresis modeling particularly important. At the end of the 19th century, physicists P. Duhem and Stefanini proposed the Duhem hysteresis model, which assumes that each state is in equilibrium under a constant input and its output characteristics change when and only when the input signal changes direction, the greatest advantage of this model is that it has a clear mathematical expression, and appropriate adjustment of the model parameters can accurately reflect the different Hysteresis nonlinearity,
11
Duhem model is a hysteresis model described by differential equations with explicit functional expressions, which provides convenience for establishing its inverse function.12,13 Under high-frequency input excitation, Duhem has a large error, especially at the special point
The theory of fractional order calculus is a generalization of conventional integration and differentiation from integer-order to non-integer order. In recent years, various complex systems have been successfully described by fractional order calculus due to its advantage of frequency dependence. In particular, it has many successful applications in the field of system control, highlighting its own unique advantages, irreplaceability, and theoretical completeness. 16 Ding et al. 17 proposed a fractional-order model approach to describe the broadband hysteresis of piezoelectric actuators, and experiments showed that the fractional-order model can be used in the accurate description and control compensation of nonlinear rate-dependent hysteresis of piezoelectric actuators in the frequency bandwidth range of 1–200 Hz. Kang et al. 18 proposed a fractional-order based BW model to describe the hysteresis effect, and the comparative experimental results on a PEAs system verified the effectiveness and superiority of the model in asymmetric and rate-dependent hysteresis description as well as model-based feed forward hysteresis compensation. Apparently, previous fractional-order calculus models have been successfully used to describe the nonlinearity of PEAs at some specific frequencies, and most of the existing Duhem models are limited to integer-order differential equations. It is well known that the fractional-order calculus extends the order of classical calculus from the integer domain to the fractional domain, and its unique nonlocal memory effect provides excellent potential for hysteresis modeling applications. In particular, for Duhem models, fractional-order calculus is a good choice for improving the description of rate-dependent hysteresis problems. However, little work has been done to apply fractional-order calculus to the Duhem model for hysteresis modeling of PEAs.
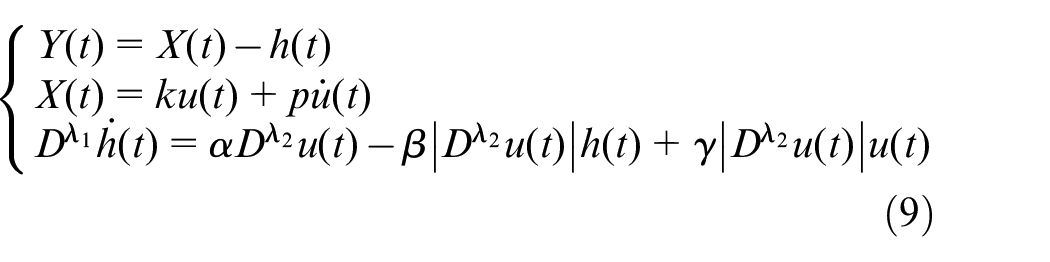
In this paper, a Duhem model based on the combination of fractional order is proposed, which has simple expressions and can accurately describe the rate-dependent hysteresis behavior and thus reduce modeling errors. The parameters of the model can be easily identified by the differential evolution algorithm. Experiments verify the validity of the model.
This paper is organized as follows: In Section 2, the Duhem model and fractional-order calculus are introduced and the FODuhem model is proposed, then in Section 3, the differential evolution algorithm is used to obtain the model parameters, and experiments are performed to prove the validity of the FODuhem model, and finally, the conclusions are given in Section 5.
Improved Duhem model
Review of the convention Duhem model
The Duhem model is a dynamic model and the basic expression of the traditional Duhem model is 19 :

where
For the hysteresis effect of PEAs Coleman proposed a simplified Duhem model expressed flowed.

Where v denotes the input voltage signal of the system, that is, the hysteresis input; ω denotes the output displacement signal, that is, the hysteresis output;

where
In order to predict the performance of the conventional Duhem model, we conducted the following experiments.
Figure 1 shows the experimental data at different frequencies, and it can be found from Figure 1 that the hysteresis lines are not only symmetric around their center points but also vary with the input frequency. For piezoelectric materials, they have rate-dependent hysteresis behavior, and the hysteresis behavior has memory characteristics. Figure 2 shows the comparison between experimental and Duhem hysteresis loops, and the results show that the conventional Duhem model cannot accurately describe the hysteresis characteristics of piezoelectric materials under high-frequency excitation. Therefore, in order to reduce the modeling error of the Duhem model, it can be improved by increasing the rate dependence of the Duhem model.
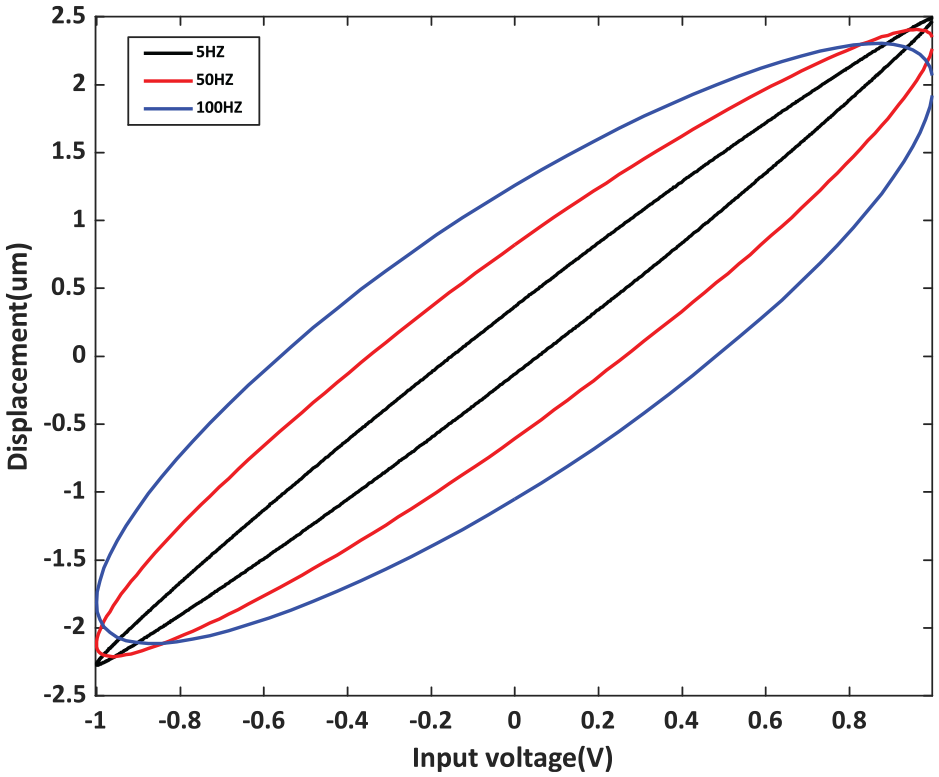
Hysteresis loops of experimental data at different frequencies.
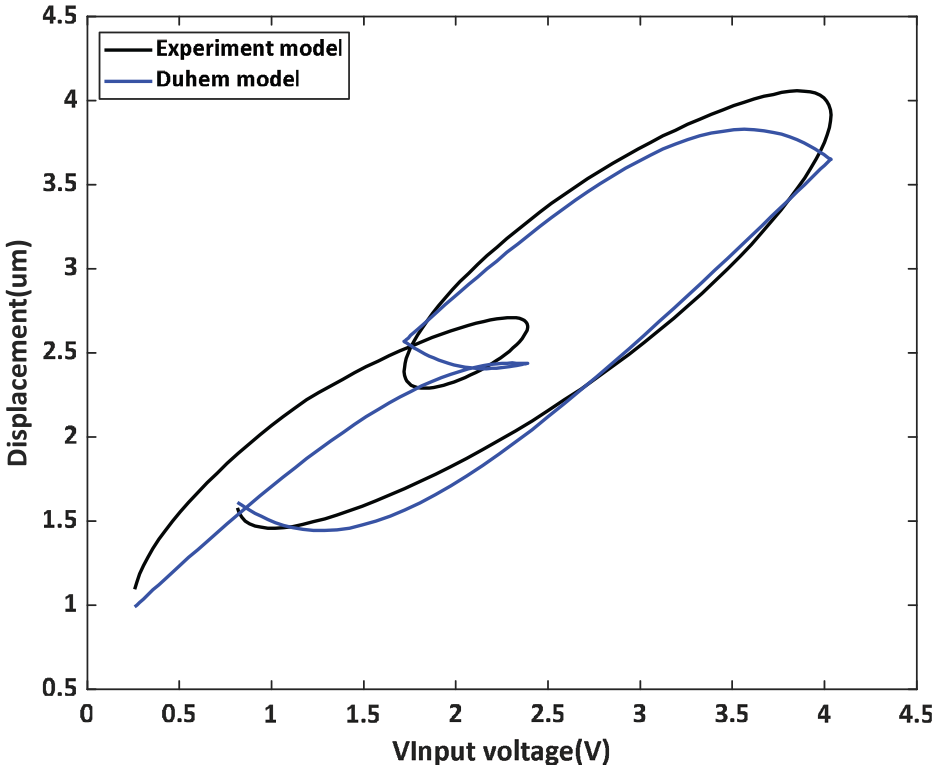
Comparison of experimental data with Duhem mode hysteresis loop.
New fractional-order Duhem model
Fractional-order calculus is a generalization of integer-order integration and differentiation. 17

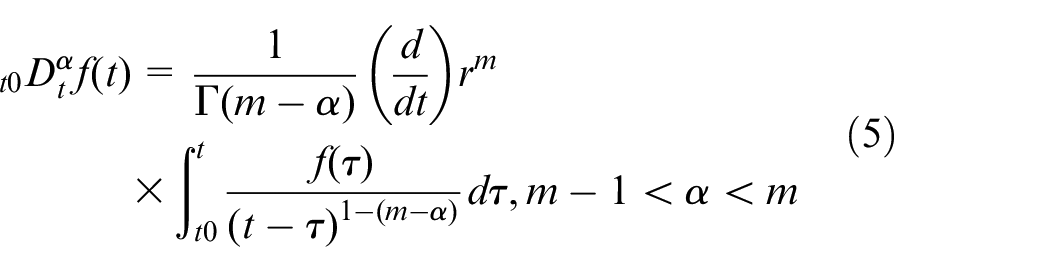
where
Fractional order systems can also be represented by fractional-order linear differentiation, expressed as follows:

where u(t) is the input, y(t) is the output, and
Performing Laplace transformation on (7) under 0 initial conditions, (7) can be rewritten in the form of a transfer function as follows:

The non-local memory-dominated nature of the lags can be well described using the memory effects of fractional-order operations, and the lags will be suitable to be described as fractional-order.
The traditional Duhem model mainly consists of a linear component
Experiment and validation
The experimental setup is shown in Figure 3. The Piezoelectric actuators (max. voltage 120 V, Physik Instrumente (PI) GmbH & Co. KG, Germany) used is driven by a voltage amplifier (model E505.00, PI). Its output displacement is measured in real-time by an internal sensor of the piezoelectric micropositioning stage (model P733.2DD, PI). The sensor output voltage signal is transmitted through a signal conditioner and then acquired by a data acquisition card (Model USB-6346, National Instruments, USA). The voltage control signal is generated by the piezoelectric control module (Model E-509.C2A, PI) and then amplified by a voltage amplifier to drive the piezoelectric ceramic driver. MATLAB/Simulink was used for all experiments.
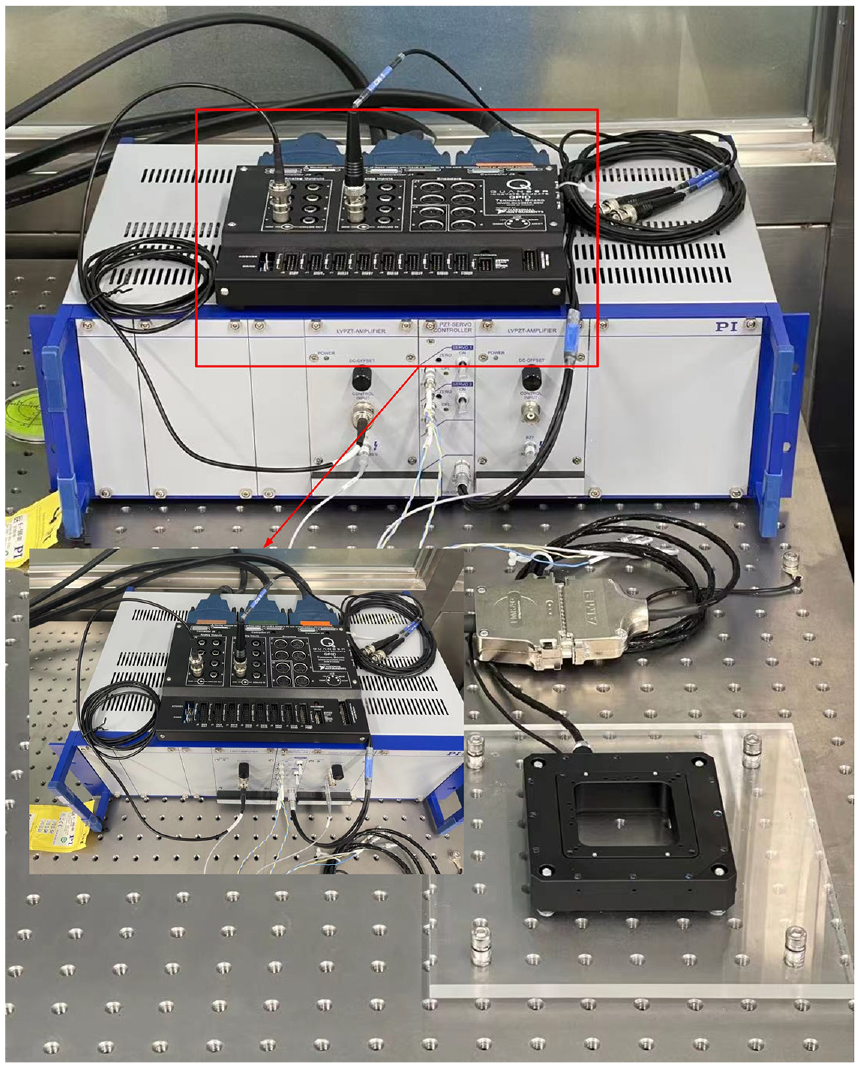
Experimental setup.
Parameter identification
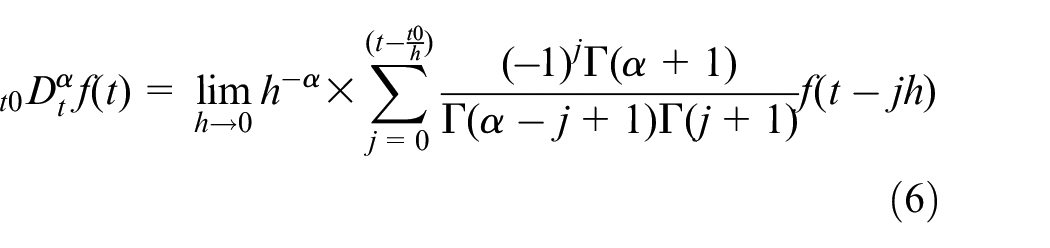
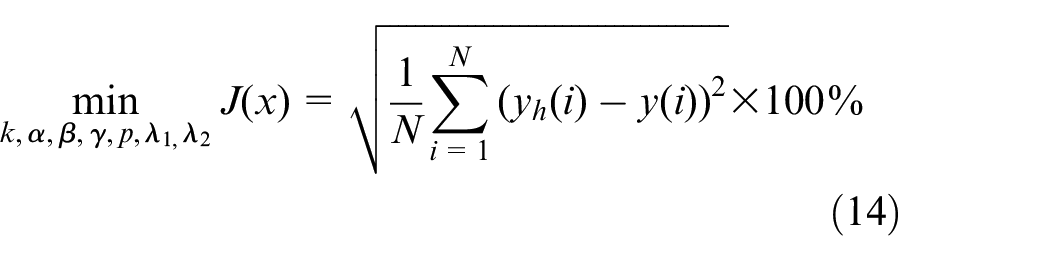
The sinusoidal input voltage and output displacement response data were recorded using sinusoidal signals at different frequencies from 1 to 50 Hz. To obtain the parameters of the established hysteresis model, the seven parameters of the hysteresis model in equation (9) were obtained using a differential evolution algorithm. And the fractional-order operator was simulated numerically using the high precision approximation calculation defined by G-L. The flow chart of the differential evolution algorithm is shown in Figure 4.
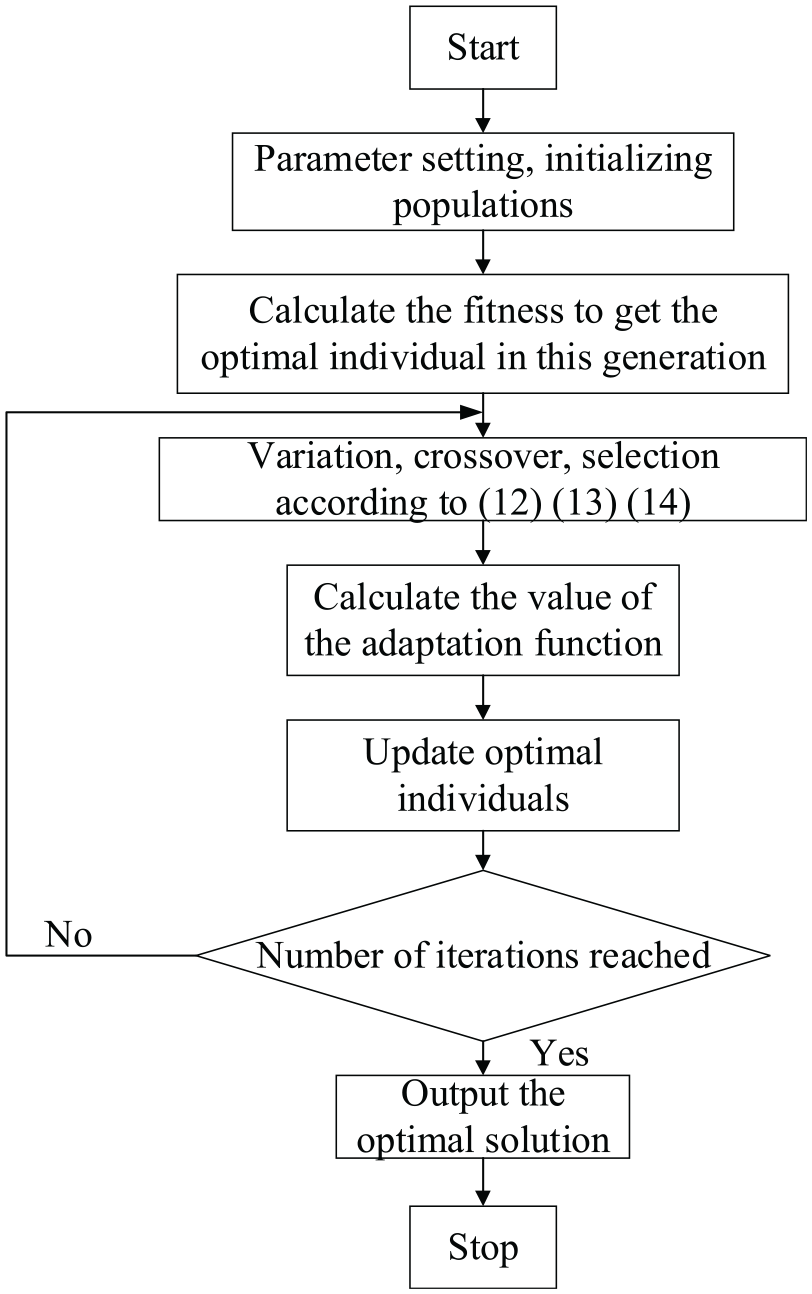
Differential algorithm flow chart.
Generation of initial populations
Set the evolutionary generation of the population G, the population size Np, and the dimension of the search space D. Randomly generated individuals within the D dimension can be expressed as

where rand is a random number between [0, 1].
Mutation operation
After population initialization, the vector of randomly determined individuals is

where F is the variation rate and
Crossover operations
The new test individual vector

where CR is the crossover probability,
Select operation
The vector

The parameters to be identified are
where
In DE, the parameters to be set are maximum number of iterations
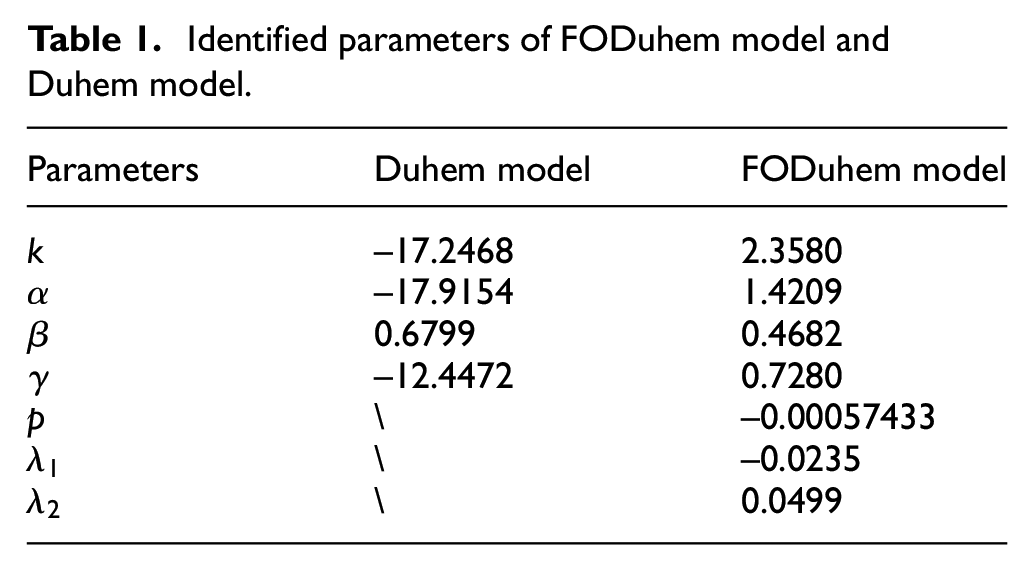
Identified parameters of FODuhem model and Duhem model.
Experimental validation
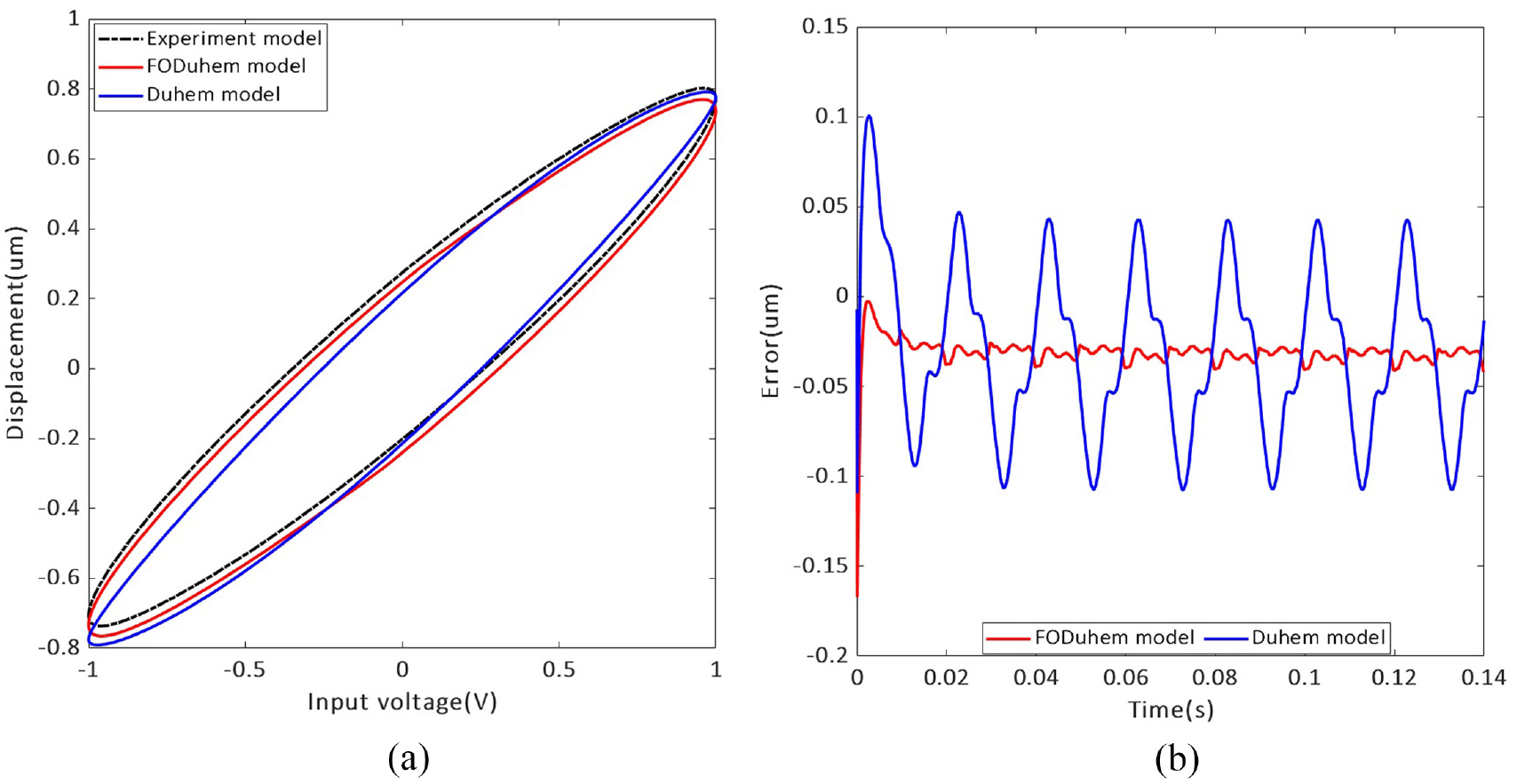
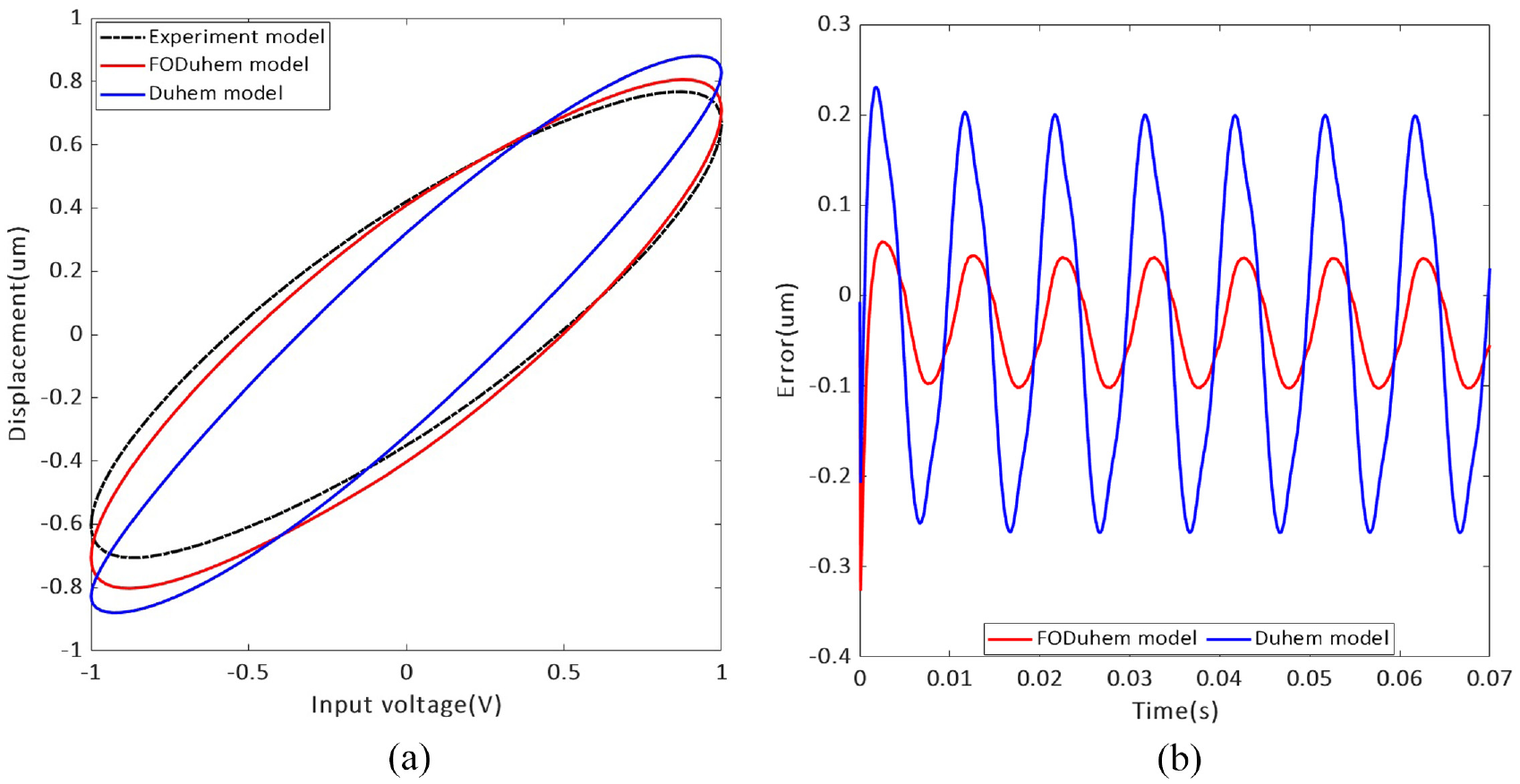
To verify the validity of the FODuhem model, five sets of experiments were conducted using sinusoidal input signals

where
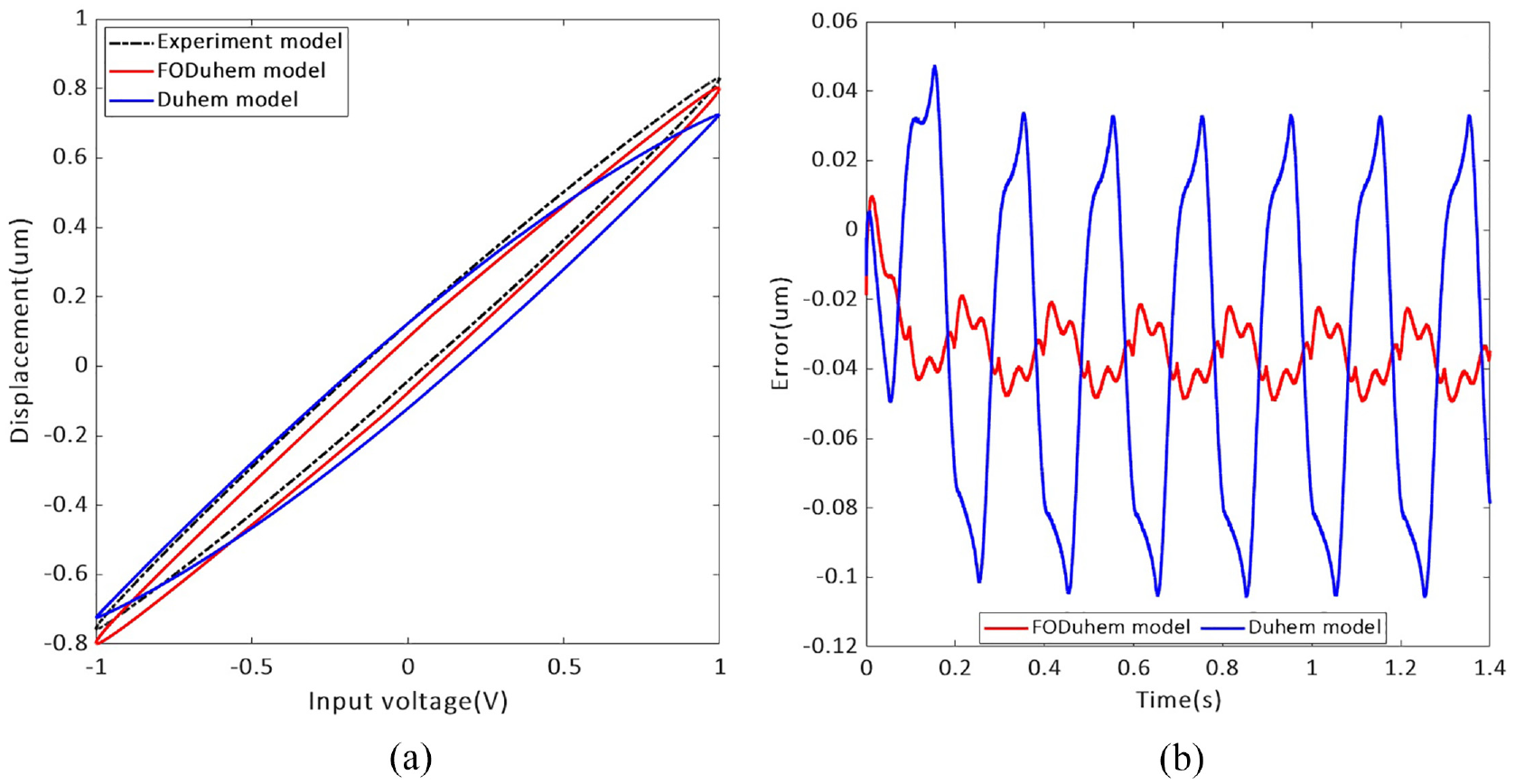
Comparison of experimental results with FODuhem model and Duhem model under
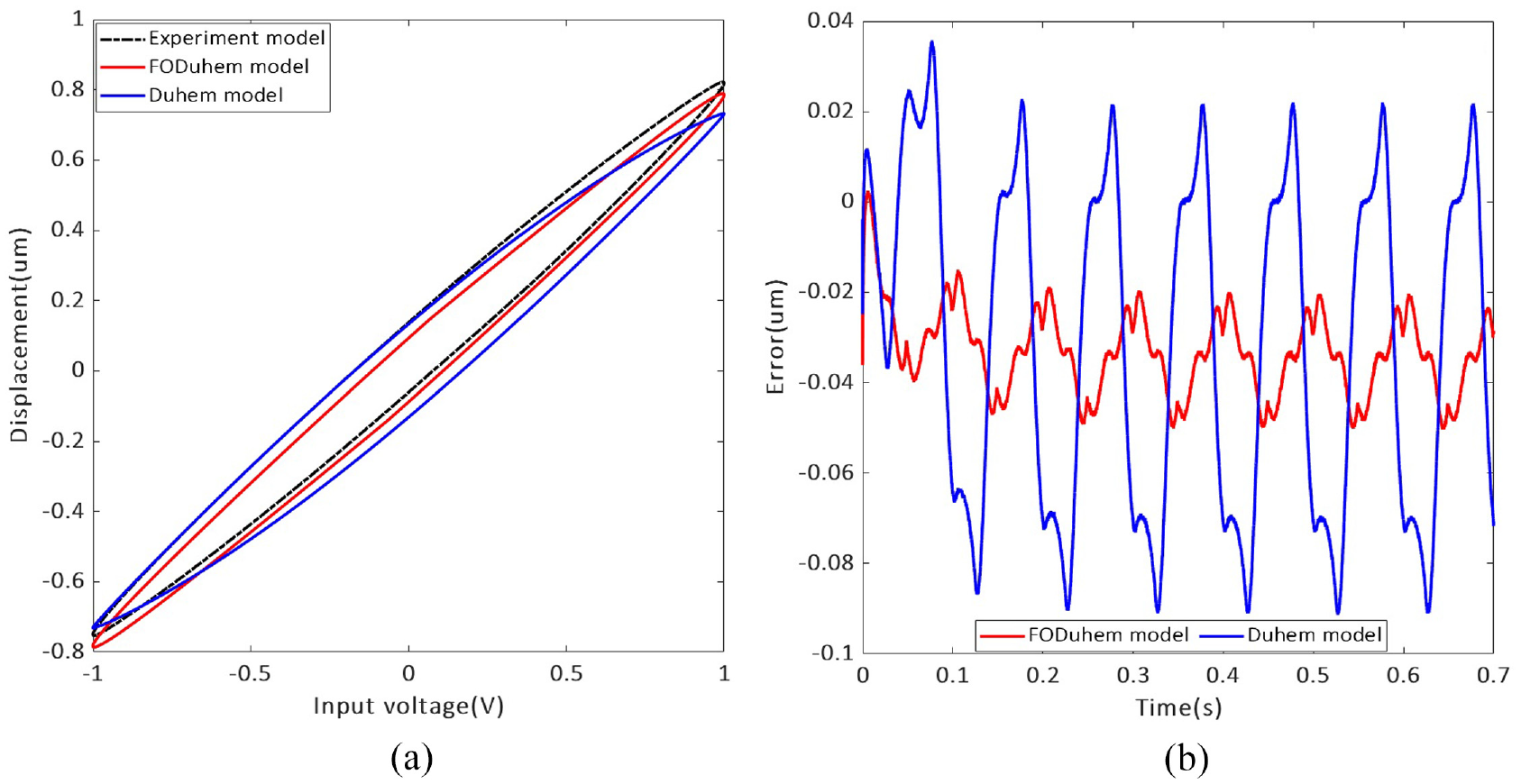
Comparison of experimental results with FODuhem model and Duhem model under
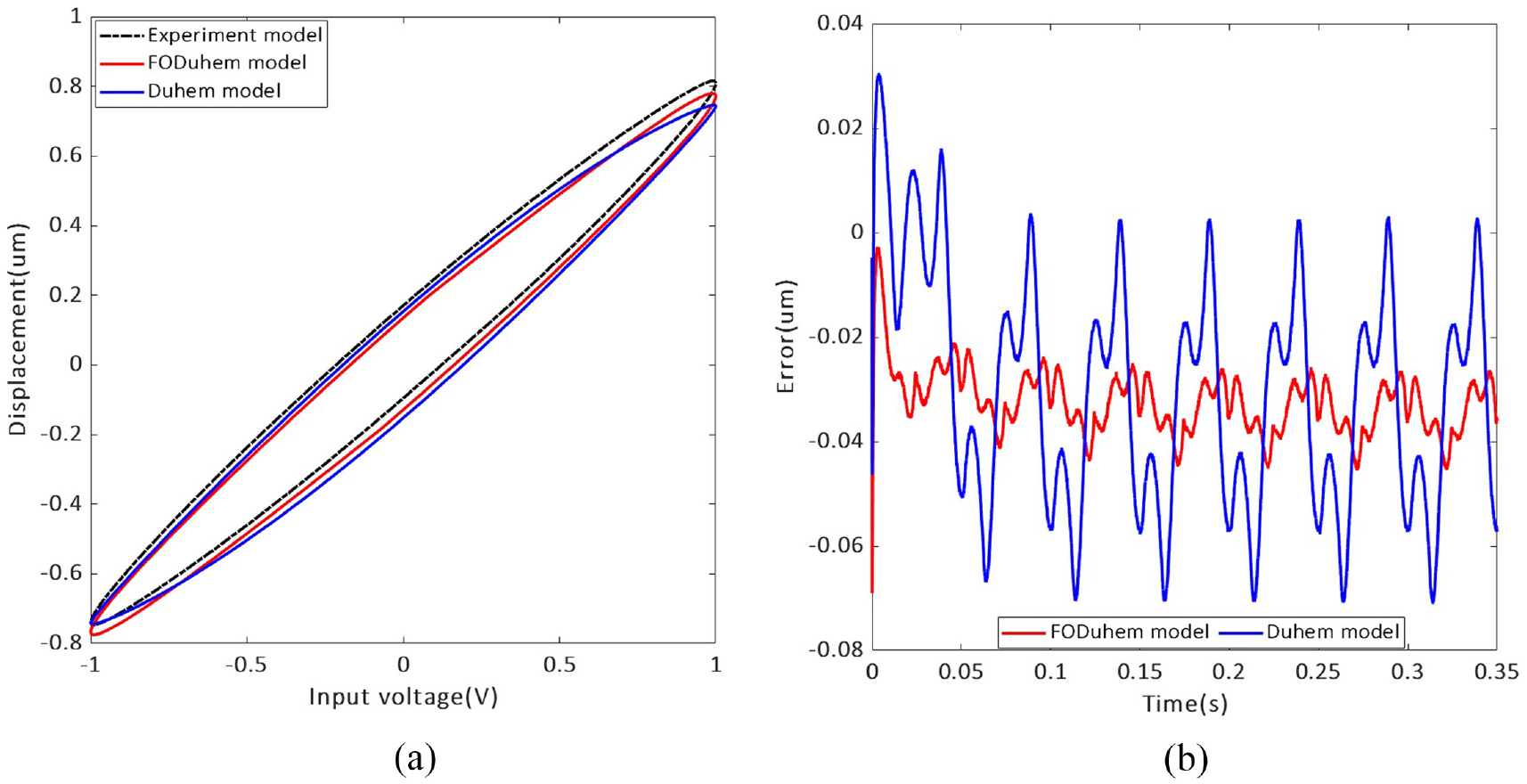
Comparison of experimental results with FODuhem model and Duhem model under
Comparison of experimental results with FODuhem model and Duhem model under
Comparison of experimental results with FODuhem model and Duhem model under
The simulation errors of the FODuhem model and Duhem model.

It can be seen that the traditional Duhem model cannot accurately describe complex hysteresis loops with asymmetric and rate-dependent behavior. The model output has a large error with the experimental results. It is worth noting that the hysteresis shape is basically unchanged at low frequencies, 21 and the fractional order operator will have a larger effect at high frequencies, so the error at higher frequencies will be smaller than the error at low frequencies. The RE error decreases sharply from 5% to 31% as the input frequency increases. In contrast, the FODuhem model performs better in describing asymmetric and rate-dependent hysteresis. Therefore, the proposed FODuhem model can solve the nonlinear rate-dependent behavior of piezoelectric hysteresis better and with high accuracy, which verifies the validity and feasibility of the model.
Conclusions
In order to improve the modeling accuracy, this paper proposes a new FODuhem model to describe the rate-dependent hysteresis characteristics of PEAs. A fractional-order operator is introduced in the FODuhem model instead of integer-order differentiation to enhance the Duhem rate-dependent characteristics, and the derivatives of the input signal allows FODuhem to better describe the hysteresis behavior of PEAs at high frequencies, and the adaptive DE algorithm is used to identify the model parameters. Comparative experimental results on PEAs systems validate the superiority of the developed model in the description of rate-dependent hysteresis. Based on these advantages, the proposed modeling approach offers a wide range of possibilities for model-based control.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported in part by Young Innovative Talents Project of Ordinary Universities in Heilongjiang Province under Grant UNPYSCT-2020191, and in part by National Natural Science Foundation of China under Grant 1251975170.