
Abstract
This paper focuses on the optimal method of the non-contact velocity measurement and relative positioning system for medium and low speed maglev trains. By analyzing the working principle of the velocity measurement method based on counting sleepers and analyzing the speed system error and random error model, it is shown that the velocity measurement accuracy based on the counting sleeper speed measurement method needs to be further improved. Therefore, a method of using multi-sensor information fusion is proposed to improve the accuracy of velocity measurement and relative positioning. Firstly, aiming at the disturbance problem of traction, braking and suspension vibration in the attitude angle calculation and the cumulative error problem of attitude angle, a posture solution method combining the optimized second-order complementary filter and the velocity adaptation Unscented Kalman filter with maximum noise reduction is proposed; Then, in order to further reduce the accumulated error of the attitude angle and the high performance requirements of the gyroscope, the bias instability of the gyroscope is analyzed, and an adaptive wavelet de-noising algorithm based on threshold optimization is proposed; Finally, to weaken the colored noise interference caused by the suspension vibration and to weaken the velocity accumulation error, a fusion velocity measurement and positioning algorithm of multi-loop Kalman filter with acceleration fusion correction and velocity accumulation error correction is researched. The effectiveness of the proposed fusion method is verified through simulation comparison analysis and on-board engineering test. Compared with the velocity measurement method based on counting sleepers, the velocity measurement accuracy is improved by an order of magnitude, and its accuracy is comparable to the high-precision velocity measurement method based on the induction loop and GPS/INS. It has certain engineering applicability and application value.
Keywords
Introduction
The non-contact velocity measurement and relative positioning system is one of the key systems in the maglev train system. The improvement of velocity measurement and relative positioning accuracy plays an important role in reducing the switching speed of electric braking and mechanical braking, low energy consumption control of traction and improving the accuracy of fixed-point parking of trains, which is related to the reliable and efficient operation of maglev trains. Since the maglev train has no contact with the track, it brings great challenge to the high-precision velocity measurement and positioning system. At present, the non-contact velocity measurement methods adopted by maglev trains at home and abroad mainly include the velocity measurement and positioning method based on electromagnetic sensor induction sleeper (counting sleeper), 1,2 velocity measurement and positioning method based on the fusion of relative positioning and absolute positioning, 3,4 velocity measurement and positioning method based on induction loop line 3,4 and velocity measurement method based on radar.
The German technology Shanghai TR high-speed maglev relative position sensor has high velocity measurement accuracy. Due to necessary to lay long stator cores with cogging structure on the entire track, which has strict requirements on the track, large amount of engineering and high cost, so it is not suitable for medium and low speed maglev systems. Based on the cross-induction loop velocity measurement system, it has been successfully-applied in the demonstration operation lines of Japan’s high-speed magnetic levitation (ML), low-speed magnetic levitation (HSST) and Korean maglev trains. The velocity measurement and positioning system in the Yamanashi Maglev Test Line in Japan has a positioning accuracy of 7 cm. 5 Since this velocity measurement method must lay loops along the entire track, the induction loops generally need to be controlled in sections. The ground loop drive system is more complex and costly, which is not conducive to the popularization and application of low-speed maglev. In the application of Doppler radar velocity measurement, Changsha Maglev and South Korea Maglev application radar are used as auxiliary equipment for velocity measurement. Because radar speed measurement is greatly affected by rain and snow, and the Doppler frequency is low at low speeds, the velocity measurement accuracy is reduced.
In China, the National University of Defense Technology first proposed a velocity measurement method based on counting sleepers. This method uses the distance between adjacent sensors as the velocity measurement reference, which can avoid the influence of sleeper laying distance, improve velocity measurement accuracy, strong engineering adaptability, and low cost, which is convenient for promotion and application. It has been successfully applied to the operation of Beijing S1 line and Changsha Maglev Express Line, The Beijing S1 line maglev train is showed in Figure 1. Maglev train of Beijing S1 line.
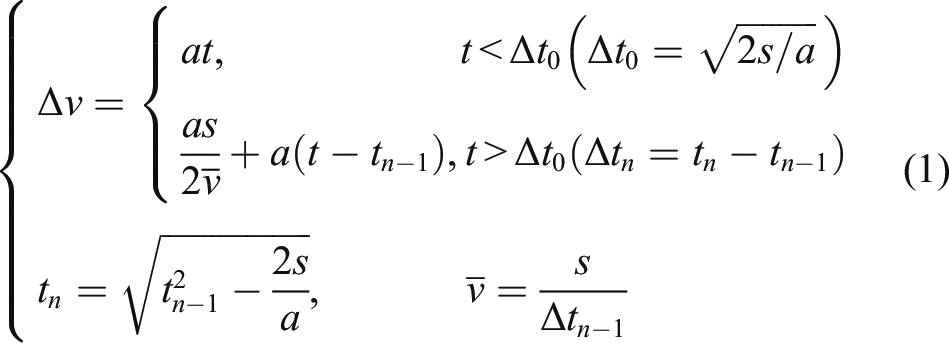
The velocity measurement method based on counting sleepers (VMCS) uses the principle of electromagnetic induction to detect the time difference Δt used by adjacent sensors to pass the same sleeper, and calculates the average speed
In response to the problem of speed system error at low speed, the current velocity measurement system of the Changsha Maglev Express uses accelerometers for speed compensation, but the accelerometers are greatly affected by vibration, so its speed compensation ability is limited. Aiming at the problem of random velocity error, Dou et al. 6 proposed a new type of speed sensor based on the eddy current induction principle to overcome the influence of suspension vibration, but the stability remains to be improvement. From the perspective of signal analysis, the velocity measurement method based on the counting sleeper(VMCS) is a typical second-order differential system, which can amplify interference noise like suspension vibration. And, the VMCS has the characteristics of the same frequency of the signal and the interference, which is difficult to handle. For the second-order differential system, Han 7 proposed the idea of using the tracking differentiator (TD) to solve the problem of jitter near the switching curve, but Han’s tracking differentiator needs to further consider the disturbance suppression problem that the signal and the disturbance are in the same frequency or the disturbance is discontinuous and the disturbance amplitude is greater than the signal strength. Research on high-performance tracking differentiators with fastness, chattering suppression and high stability is a hot spot of current research. 8–10 Aiming at the contradiction between fast convergence and chattering throughout the entire process, Liu 11 eliminated the solution of complex number to achieve rapid convergence no matter whether it is far from the equilibrium point or close to the equilibrium point. However, the complex dynamic characteristics and the signal characteristics of high-amplitude interference are not analyzed. Aiming at the problem of parameter adjustment, Gao et al. 12 proposed a tracking differentiator that can adjust parameters adaptively. The frequency information is used to realize the trade-off between noise suppression and phase lag, which improves the High-frequency signal tracking ability. However, it needs to utilize the frequency characteristics of the signal, and the applicability to interference with the same frequency remains to be improved. So, further research is needed for the high-performance tracking differentiator with fastness, stability and small jitter. Due to the complex amplitude-frequency characteristics of the electromagnetic speed sensor for maglev trains, extremely high requirements are placed on the tracking differentiator and adaptive filter. At present, there are few research literatures on tracking differentiator applied to the velocity measurement system based on counting sleepers.
Aiming at the problem of the same frequency of signal and interference in the velocity measurement method based on counting sleepers, multi-information fusion is one of the effective methods to solve this problem.
In Ref. 13 reviewed data fusion, and mainly reviewed and studied the methods of data fusion for the underlying specific data. Kokar et al. 14 proposed a completely general and abstract fusion framework scheme. This scheme is based on classification theory and can fully capture and fuse various data, such as data fusion, feature fusion, and decision fusion. Aiming at the problems of nonlinearity, multi-mode, deep coupling, networking, high dimension and unknown disturbance input in complex target tracking system, Pan et al. 15 gave a general description of the algorithm in multi-path and multi-mode multi-target tracking scenario, and discussed the problems and research directions of the variation Bayes theory in the target tracking field. GPS/INS is a multi-level fusion. The loose combination and the tight combination have the problem of poor positioning accuracy or even divergence when the GPS signal is weak or completely lost. At present, in domestic and foreign, it is mainly concentrated on combining other information or optimization algorithms to improve the accuracy of positioning and speed measurement. Tang 16 designed a fusion model based on sparse signal representation theory, which fused inertial navigation system(INS) and WLAN received signal strength (RSS) information. In view of the uncertainty, high noise and long-term interruption of GPS signal of inertial navigation sensor, extreme learning machine (ELM) is used in Ref. 17 to improve positioning speed and accuracy, and fuzzy logic system is used to deal with the uncertainty in GPS/INS data. To solve the problem of decreased accuracy of GPS and Doppler velocity (DL) due to bad weather and related noise, Mostafa et al. 18 proposed a Data Sharing Factor-Combination Filter integration method based on GPS/DV/MEMS-INS, which used a reference source with an accurate system (GPS or DV) to correct navigation errors while avoiding the lowest precision systems. Weide et al. 19 used an unscented Kalman filter to achieve multi-sensor fusion, and proposed an indoor positioning method combining inertial measurement unit and ultra-wideband (UWB) to suppress the accumulation of IMU errors. Fusion Kalman filter has been widely used in integrated navigation, but for positioning and velocity measurement systems with different data rates and different noise levels, the algorithm needs to be optimized. S. Han 20 uses a two-speed Kalman filter to deal with the rate difference problem. Xiong et al. 21 proposed a parallel model adaptive Kalman filter algorithm, which incorporates the noise statistical estimator into the framework of multi-model adaptive estimation, thereby reducing the complexity of the estimator. L. Tan 22 studied the satellite lock-out and indoor pedestrian navigation models in outdoor sheltered areas, but they were greatly affected by other interference signals.
Another research method is to correct the accumulated error of inertial sensor by combining the kinematic characteristics, such as the start and stop characteristics of human foot when walking. The DLR Laboratory of Germany proposed a position estimation framework based on shoe bound inertial sensor; Nilsson of Signal Processing Laboratory of Royal Institute of technology of Sweden proposed the inertial navigation system based on shoe bound zero speed correction, which is a local decentralized system of step-by-step inertial navigation and dead reckoning. This kind of algorithm can assist positioning when satellite signal is poor and ensure the connection of navigation and positioning Continuous, finally achieve seamless positioning. 23
Therefore, based on the idea of learning from each other’s strengths, this paper proposed a fusion velocity measurement and positioning method combining 5-channel electromagnetic velocity sensor and 6-DOF MEMS-IMU inertial measurement unit, which has the advantages of acceleration fusion correction and velocity accumulation error correction. The fusion design is carried out at the three levels of data fusion, feature fusion and decision fusion. Compared with the GPS integrated navigation system, it overcomes the problem of being limited by geographical location, and can work stably in the station and the depot for a long time. Secondly, velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) and the wavelet transform algorithm based on threshold noise reduction are used to reduce the high performance requirements of the gyroscope and improve the accuracy of attitude angle calculation.
Error analysis and model establishment
Figure 2 is the schematic diagram of the scheme of existing velocity measurement and positioning system. Among them, A1∼A5 are inductive proximity switch sensors, and the sensor spacing is s. The velocity measurement method based on counting sleepers uses the principle of electromagnetic induction to detect the time difference Δt used by adjacent sensors to pass the same sleeper, and calculates the average speed The composition of the Multi-information fusion system.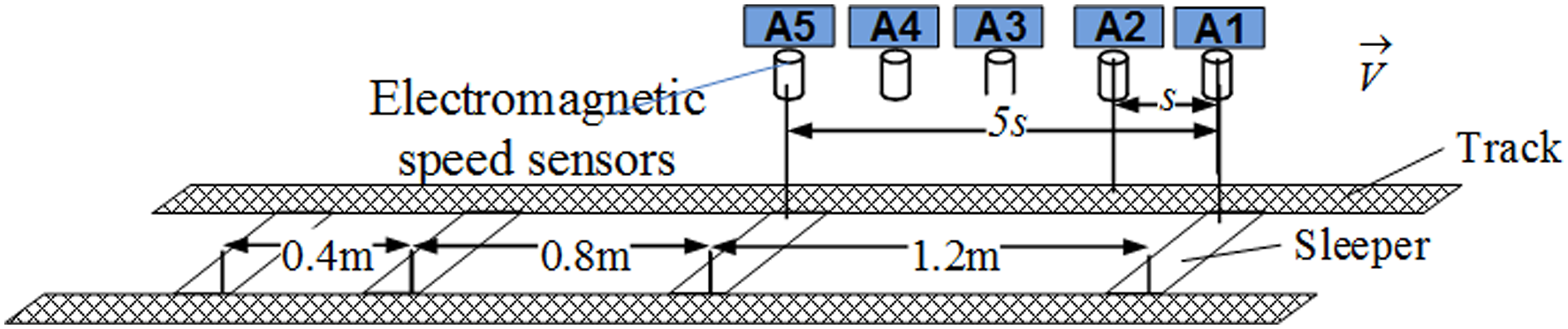
Error model analysis
System error analysis of the VMCS
Assuming that the train acceleration is a and the running time is t, the actual velocity
Random error analysis of the VMCS
The random error caused by suspension fluctuation is mainly analyzed. Assuming that the working conditions of each sensor probe are the same, the horizontal positions Relationship between different heights and sensor trigger position.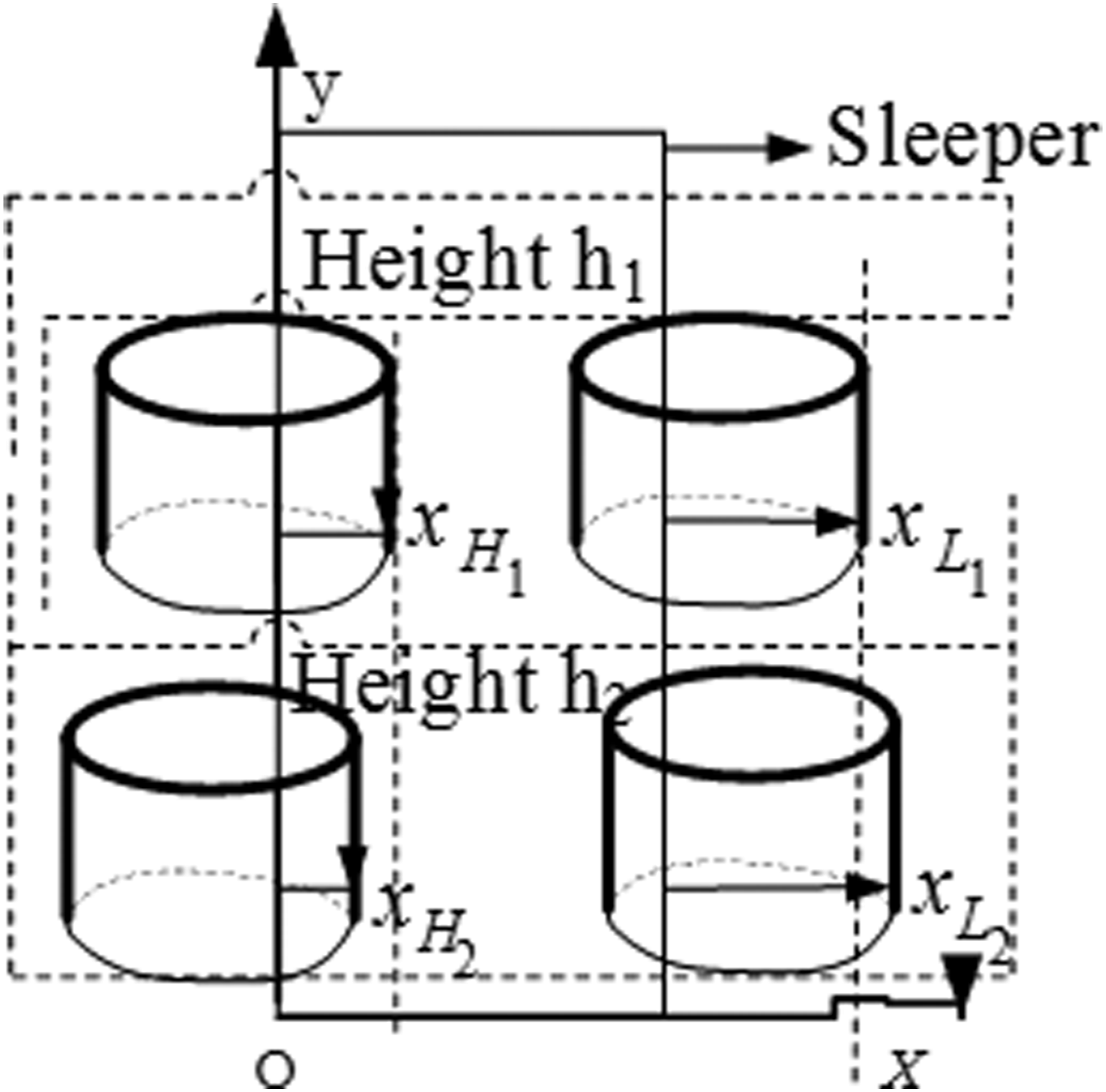
As a result, the detected time value will change. From the formula
Velocity measurement and positioning scheme based on multi-information fusion
The network topology diagram of the multi-sensor fusion structure is shown in Figure 4. Among them, A1∼A5 are inductive proximity switch sensors, and the sensor spacing is s, and M is the MEMS-IMU inertial measurement unit, which contains a 3-axis accelerometer and a 3-axis gyroscope. Topological diagram of sensor fusion structure.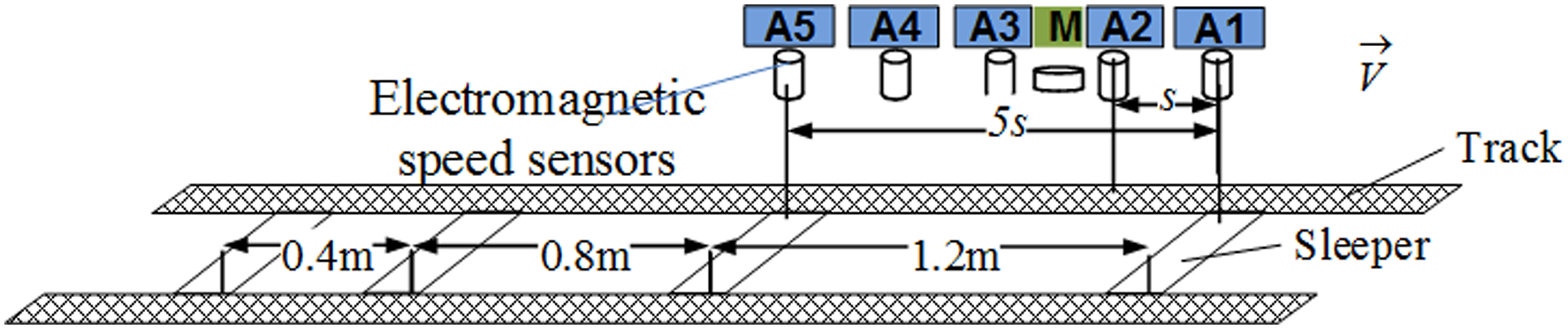
The rail panel of medium and low speed maglev track is composed of F rail and sleeper. The sleeper is a steel structure, and the inductive proximity switch can be used as a speed sensor probe. The use of multiple sensor fusion can achieve a speed output within the same distance, and the speed accuracy is high at a uniform speed. The multi-information fusion method based on MEMS-IMU gives the train acceleration and speed increment in real time. The resolution is not affected by the train speed, and it is complementary to the speed measurement method of counting sleepers. And by analyzing the random interference of the gyroscope and the model of the velocity sensor affected by the suspension vibration, and designing a suitable fusion velocity measurement positioning algorithm, high-precision velocity measurement and relative positioning can be realized.
Model establishment of fusion speed measurement and positioning system
Rotation transformation matrix and Euler equation model establishment
The X, Y and Z axes in the navigation coordinate system are selected according to the geographical North, East and ground directions, and the three axes in the carrier coordinate system are selected according to the front, right and bottom directions of the carrier. The course angle ψ is defined as the angle between the longitudinal axis and the north axis n, the pitch angle θ is the angle between the longitudinal axis and the horizontal plane, and the roll angle is the angle between the transverse axis and the horizontal plane. Then the navigation coordinate system NED to the carrier coordinate system b can be rotated around the x, y and z axes to obtain the transformation matrix as shown in (2)
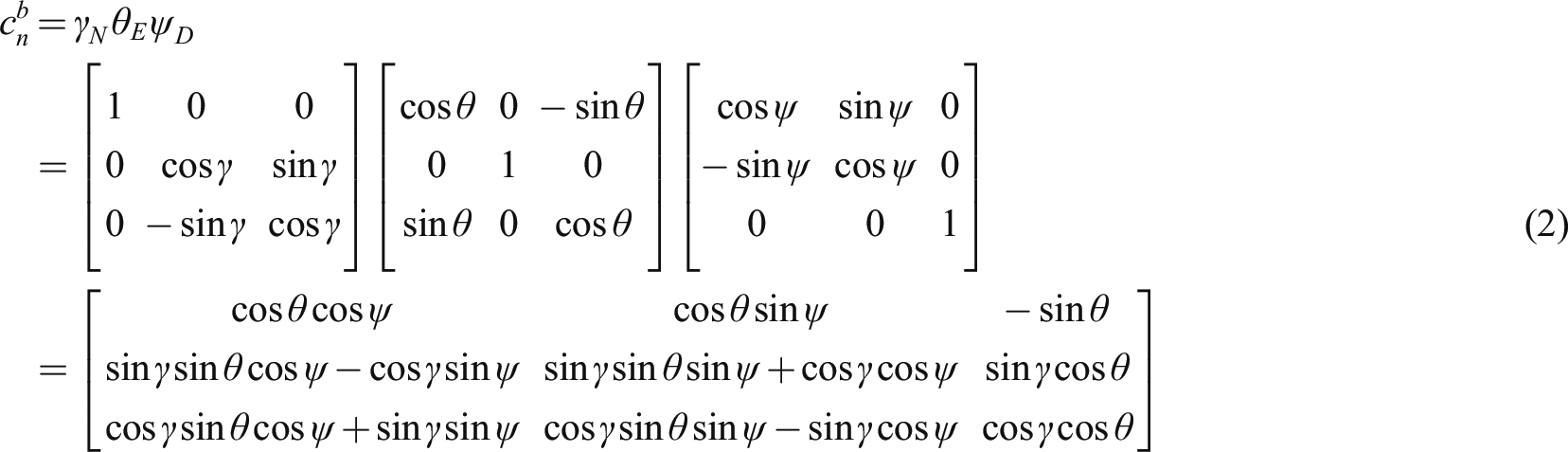

The maglev track has a large radius of curvature and the angle is not greater than 10°, so there is no locking phenomenon. Therefore, the carrier’s full attitude Euler angle method is suitable for the velocity measurement and positioning system of the maglev train.
Attitude angle calculation model based on three-axis acceleration fusion
When the pitch angle and roll angle are respectively θ and γ, the calculation formula for pitch angle and roll angle is shown in (4), and train acceleration is obtained according to (5)
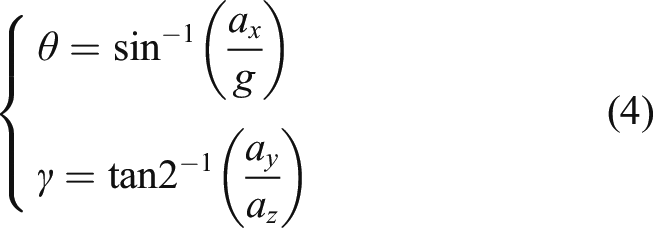

The attitude angle calculated by Euler differential equation (angular velocity integral) is fused with the attitude angle calculated by three-axis acceleration, the train acceleration
Velocity measurement and positioning method based on multi-information fusion
The principle diagram of the velocity measurement and positioning algorithm based on multi-sensor information fusion (MF-VMPS) is shown in Figure 5. From the error model analysis, it is shown that the velocity based on the velocity measurement method of counting sleepers (VMCS) has systematic errors and random errors, and the acceleration and angle calculated by MEMS-IMU have cumulative errors and random errors, especially at the bogie of a maglev vehicle with high suspension vibration. It is not advisable to simply compensate the velocity through acceleration integration. Considering these issues, firstly, the second-order complementary filtering based on the four-element method and the velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) is used to accurately obtain the vehicle attitude angle and running acceleration. Secondly, the fusion velocity measurement and positioning algorithm with multi-loop Kalman filtering with acceleration fusion correction and velocity accumulation error correction (ML-LKF-FVMPS) is used to realize the acceleration and velocity fusion of the two systems, and improve the recognition accuracy of train acceleration. In addition, the adaptive wavelet noise reduction algorithm based on threshold optimization is used to reduce the high precision requirements of inertial sensors. The innovation of this paper is to make full use of the complimentarily of the two velocity measurement methods. In the acceleration and deceleration phase, the velocity of the MEMS-IMU can be fully utilized for compensation, and the velocity value can be corrected in real time at the trigger time of the electromagnetic velocity sensor or the uniform velocity phase, and reduce the error caused by signal drift. The principle of MF-VMPS.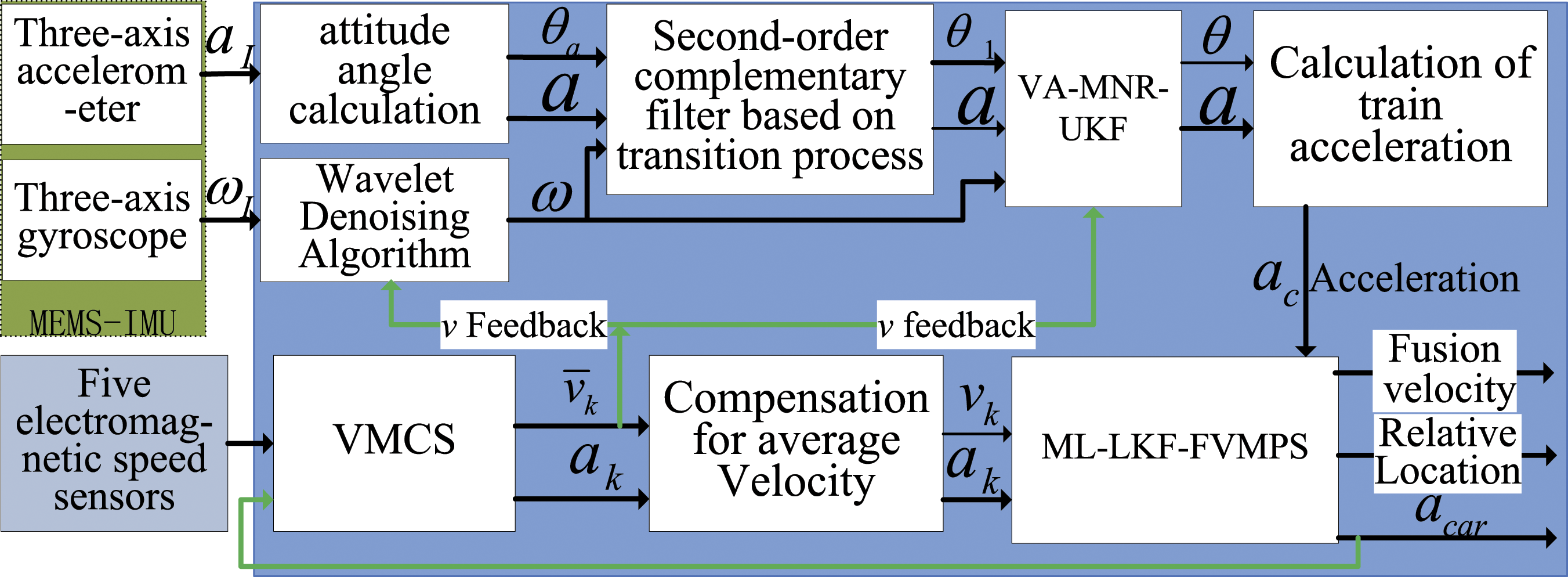
Analysis of Velocity Measurement and Positioning Algorithm Based on Multi-information Fusion
Analysis of attitude calculation algorithm based on multi-information fusion
The pitch angle and roll angle of the train can be obtained based on the fusion of the three-axis accelerometer, but the accelerometer has a slow dynamic response and is susceptible to the interference of train vibration and motion acceleration; while the angular velocity of gyroscope signal has various random interferences and is greatly affected by temperature, so long-term integration will cause large drift errors. It is proposed that the two kinds of information are fused and switched through the velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) algorithm, which is, the weight of the attitude angle calculated by the accelerometer is increased in the case of partial static, and the attitude angle integrated by the gyroscope is more trusted when the dynamic performance is high and the vibration is large. In order to further reduce the drift error caused by the random interference of acceleration and angular velocity, the output of the second-order complementary filter based on the four-element method is used as the observation of the VA-MNR-UKF, and the wavelet de-noising algorithm based on the threshold optimization is used to deal with the bias instability of the gyroscope before sending it to the VA-MNR-UKF. The MEMS-IMU attitude calculation algorithm based on multi-information fusion is shown in Figure 6. Posture calculation algorithm based on multi-information fusion.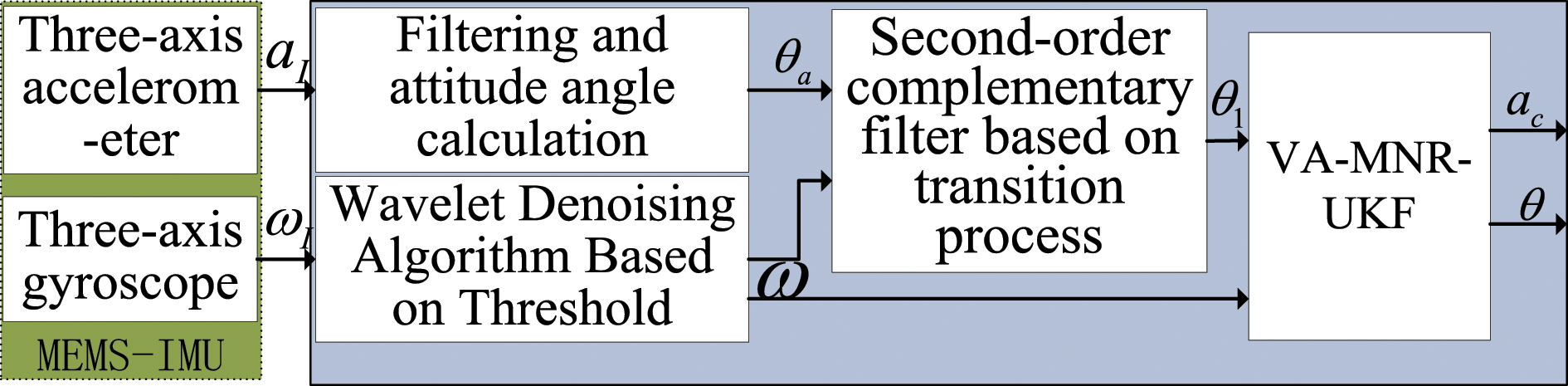
The complementary filtering algorithm was first proposed by Wirkler in 1951. It has good dynamics, but its ability to suppress noise is limited. Anderson et al. used improved complementary filtering to fuse the low-frequency noise heading signal and the high-frequency noise radio deviation signal to obtain accurate rate signal estimation.
24,25
The second-order complementary filter is shown in (6), which adds a PI regulator, but it is easy to overshoot and needs to be adjusted

In order to overcome the balance between the dynamics and over modulation of the second-order complementary filter, this paper optimizes the second-order complementary filter, that is, when the attitude angle calculated by the accelerometer has a large sudden change of
Arrange the transition process


Figure 7 is the principle diagram of the optimized second-order complementary filter algorithm arranged through the degree process. Because the four-element method is adopted, it is actually an excessive process arrangement for the gravity error of each axis. Optimized second-order complementary filter.
The posture calculation algorithm based on multi-sensor fusion is deduced and analyzed below.
Derivation of the second-order complementary filter based on the four-element method
The Euler angle matrix can be converted into a four-element matrix by (4), and the four elements are taken as 1) First, perform transition processing on the acceleration signal according to (7) and (8); then perform normalization processing; 2) Combining (9), DCM matrix rotation transformation 3) Perform vector cross product to compensate in the body coordinate system 4) According to the optimized PI regulator with transition process, the error is adjusted to compensate the angular velocity

According to the critical damping standard system of the second-order system, 5) The quaternion is updated by first-order Bika method 6) Normalizing the four elements; 7) Output attitude angle


Derivation and optimization analysis of the algorithm of velocity adaptation Unscented Kalman filter with maximum noise reduction
According to (3) and (4), it can be seen that the attitude angle conversion formula solved by Euler differential equation and accelerometer contains trigonometric function and inverse trigonometric function, which is a nonlinear system. Unscented Kalman filter is a nonlinear filtering method proposed by S.Julier et al. It uses unscented transformation to determine sampling points near the estimated point, and uses a series of determined samples to approximate the posterior probability density function of the state to solve the mean value and the non-linear transfer problem of covariance thus effectively overcoming the shortcomings of EKF estimation accuracy and stability. Due to suspension fluctuations and traction braking, there is colored noise interference in angular velocity and acceleration, resulting in fluctuations in the mean and variance estimated by UKF through sample points, and the estimation accuracy is reduced. So, based on this, this paper proposed to calculate the attitude angle based on the velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) to solve the problem of contradictory dynamics and filtering accuracy of UKF nonlinear prediction. And used the output of the second-order complementary filter as the observation of the VA-MNR-UKF to realize the fusion of the complementary filter and the UKF.
Set the estimated state variable of the attitude angle:
It can be seen that the state equation is nonlinear, and the observation equation is linear
Among them,
The process of VA-MNR-UKF algorithm is as follows: 1) Determine the initial mean 2) Calculate 2N + 1 Sigma points 3) Calculate the weight corresponding to the Sigma point in step 2)

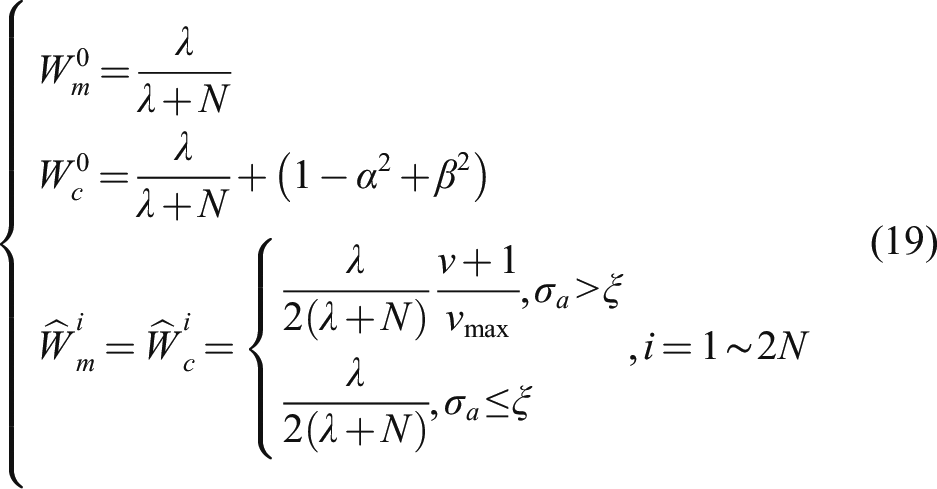
Appropriate adjustment of α and λ can improve the mean estimation accuracy, and adjustment of β can improve the variance estimation accuracy. 4) Calculate the one-step prediction 5) One-step prediction 6) According to the one-step predicted value, UT transform again to generate a new sigma point set 7) Substitute 6) into the observation equation to obtain the predicted observation value 8) Calculate the Kalman gain matrix 9) Update state






The velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) algorithm optimization analysis:
The weight coefficient of the ordinary UKF algorithm does not change when the parameters are fixed, and the signal-to-noise ratio of the sensor installed at the bogie is easily affected by suspension vibration and resonance. The use of a unified filter noise reduction weight coefficient is not conducive to the noise reduction effect at parking or low velocity, and the velocity measurement method of counting sleepers (VMCS) has systematic errors in the low velocity stage. In addition, there is colored noise interference in angular velocity and acceleration caused by suspension fluctuation, traction and braking, and its update frequency is a function of the train running speed. The mean and variance estimated by the unoptimized UKF filter through sample points have fluctuations, and the estimation accuracy is reduced. Therefore, it is proposed to restrict the weight coefficient according to the speed. The constraint equation is shown in (19). The smaller the speed, the smaller the weight coefficient, which can overcome the disturbance caused by vibration.
To improve the stability of The velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF), the weight coefficient of the UT transform sigma mean point remains unchanged, and only the weight coefficient of the mean symmetric sigma point is changed. The (19) shows that the lower the speed, the smaller the weight coefficient, which weakens the influence of variance, and the noise reduction effect obviously. Considering that when the angle calculated by the accelerometer converges to a normal value and the variance of the signal is small, the angle obtained by VA-MNR-UKF cannot converge in time because the weight coefficient is limited by the velocity. Therefore, it is further proposed to switch the weight coefficients according to the variance

Analysis of Fusion Velocity Measurement and Positioning Algorithm Based on Multi-loop Kalman Filter
Due to the influence of suspension fluctuation, random vibration of traction and braking, there is colored noise interference in the calculated attitude angle and train acceleration. And, the velocity measurement method of counting sleepers (VMCS) has a velocity accumulation error. Therefore, it is necessary to fuse the information of the two speed measurement methods to obtain High-precision velocity and relative positioning information. For this reason, the Fusion velocity measurement and positioning algorithm with multi-loop Kalman filter with acceleration correction and velocity accumulation error correction (ML-LKF-FVMPS) is adopted to obtain accurate train acceleration and velocity, and a fusion velocimetry localization algorithm based on extended state Kalman filter is derived. The fusion speed measurement and positioning algorithm is shown in Figure 8, where Fusion velocity measurement and positioning algorithm with multi-loop Kalman filter.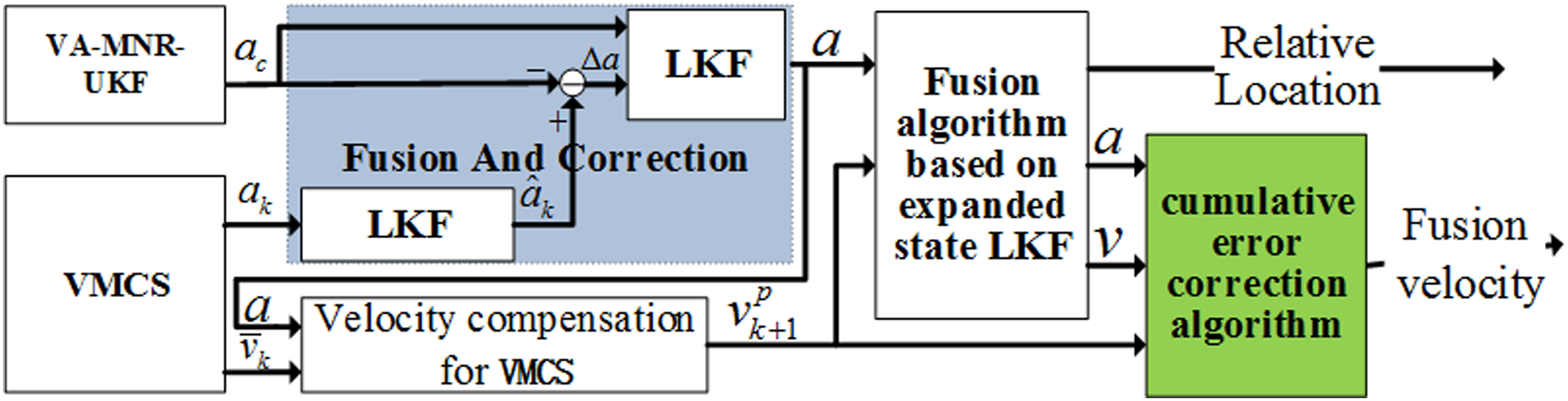
The multi-source acceleration fusion correction algorithm fuse the train running acceleration of the two velocity measurement systems.
System state and observation equation

LKF filtering process of multi-source acceleration fusion and correction algorithm
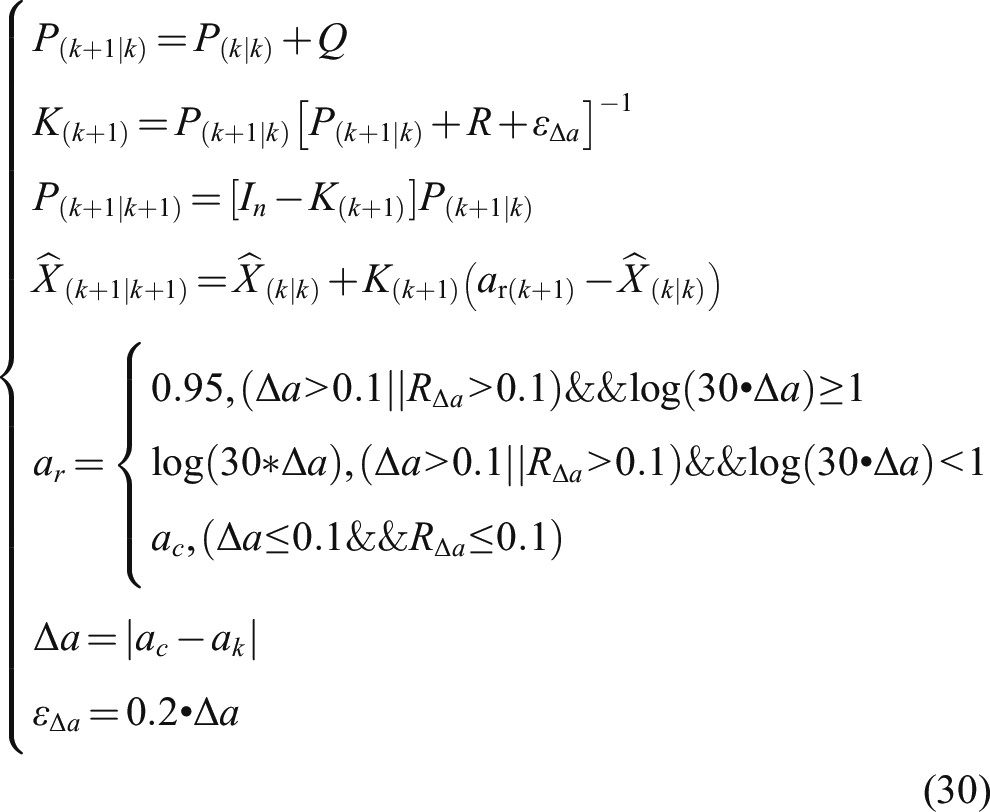
Where, the core formula is the method for obtaining
The average velocity

The velocity (v) obtained by acceleration (a) integration and its correction
The derivation process of the fusion velocity measurement and positioning algorithm based on the extended state Kalman filter is as follows:
The velocity

The acceleration signal has colored noise due to the suspension vibration, so the acceleration

So, the filtering problem has been transformed into a standard Kalman filtering problem. The specific derivation formula can be seen in the relevant references and will not be repeated here.
By whitening the colored noise of the acceleration signal, it is helpful to reduce the random error caused by the suspension vibration and the influence of the colored noise of the MEMS-IMU sensor itself. The advantage of this method is that by fusing the Kalman filter algorithm, it can achieve interpolation compensation and further filter the noise.
Analysis of Adaptive Wavelet De-Noising Algorithm Based on Threshold Optimization
The performance of MEMS-IMU plays an important role in improving the velocity measurement accuracy of the system. From the nature of the MEMS-IMU error source, it can be seen that the error sources of the MEMS-IMU signal are mainly divided into two categories: system error and random error. System errors mainly include sensor installation error, scale factor error, misalignment error, and constant drift. The constant zero deviation can be processed by the software to calculate the average value of the data, and it will not be analyzed here. In references 20 and 22, the error model of MEMS-IMU can be approximately simplified as

Considering that the maglev vehicle runs smoothly and the running time between stations is short, the angle can be corrected in time. Therefore, this paper ignores the scale factor error.
26
The error model is further simplified as follows

It is difficult to model the colored noise with bias instability and the signal denoising algorithm is complicated. Therefore, in this paper, a wavelet denoising method that does not need to establish a model is used to deal with this problem. To reduce the high-precision dependence of the gyroscope and the accumulated error of the angular velocity integral of the gyroscope, an adaptive wavelet noise reduction algorithm based on threshold optimization is proposed to deal with the zero-bias instability of the gyroscope. In this way, the long-term measurement accuracy of the gyroscope and the applicability of the velocity measurement method are improved.
In this paper, the Mallat wavelet transform algorithm is used to analyze the gyroscope signal. 27 Here, only the proposed improvement method based on the threshold function is described, analyzed and improved.
The improvement methods for wavelet denoising mainly include the improvement of wavelet basis and the improvement of threshold and threshold function. Denobo proposed hard threshold function and soft threshold function noise reduction methods. 28,29 Because the hard threshold function is discontinuous, local oscillations will occur. The soft threshold function has good continuity, but the wavelet coefficients have systematic errors. In view of the problems of soft threshold function, domestic and foreign researchers analyzed methods such as modular square root threshold function, soft and hard compromise threshold function and half threshold function, and further proposed adaptive threshold function methods; On the other hand, the threshold noise reduction method proposed by related scholars based on the difference between signal and noise characteristics has obvious noise reduction effect for specific objects. B. Yu 30 constructed an adaptive threshold function with adjustable parameters. At the same time, in order to suppress Gibbs visual distortion, a dual-input wavelet transform with translation invariance was introduced; Alyasseri et al. 31 used the mean square error (MSE) function in advance To measure the optimality of the control parameter combination, five powerful heuristic algorithms are proposed to find the best wavelet transform parameters; El-Dahsha 32 used genetic algorithms to select the best wavelet noise reduction parameters to maximize the filtering performance; In reference to the problem of low signal-to-noise ratio or poor filtering effect when the frequency overlaps, Wu et al. 33 proposed a double wavelet de-noising method, which uses the difference in wavelet coefficient distribution and forces the de-noising signals in the two wavelet domains to be the same. Realize more details retention; Chen and Bui 34 proposes to use the ratio of the bias instability of each layer to the corresponding mean value to adjust the threshold; Peng et al. 26 associated the threshold function with the maximum wavelet coefficient during static floating and the bias instability at the highest decomposition scale. The noise reduction effect is good, but it has the disadvantage of a hard threshold function.
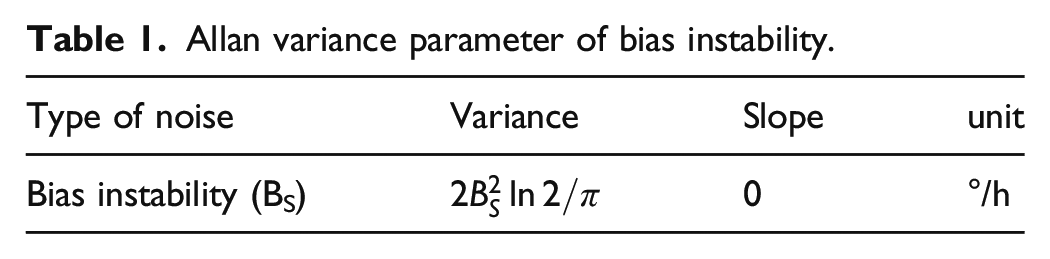
Allan variance parameter of bias instability.
Due to the smoothness of the medium and low-speed maglev transportation track, the angular velocity frequency is generally less than 2 Hz during normal operation, and the useful signals are basically distributed in the high-level decomposition scale. Therefore, this paper proposed to reconstruct the signal components of the high-level four-level decomposition scale, and select the weight coefficient of each layer according to the speed, which reduces the complexity of the wavelet algorithm.
Since the velocity measurement method based on counting sleepers has the characteristics of higher speed and higher velocity measurement accuracy, this paper proposes to optimize the threshold function according to the speed signal, and then combines the characteristics of zero bias instability with the threshold value to improve the noise reduction effect of zero bias instability. The optimized threshold and threshold function are shown in (38), and a local threshold method based on bias instability, noise mean square deviation and decomposition scale correlation is adopted; and an adaptive soft threshold function with adjustable parameters is constructed. The higher the speed, the closer the threshold function is to the modulus square threshold function, and the lower the speed is, especially when the parking state is close to the hard threshold function, and more noise will be filtered Except.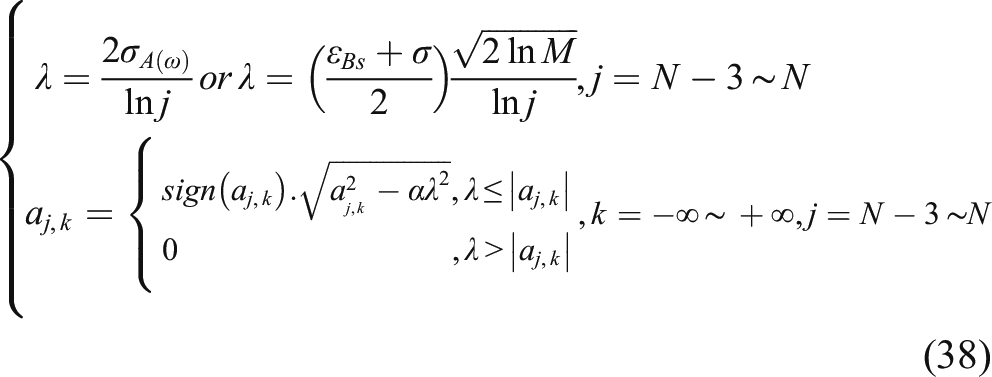
The specific process of wavelet noise reduction algorithm based on threshold optimization is shown in Figure 9. Wavelet noise reduction algorithm based on threshold optimization.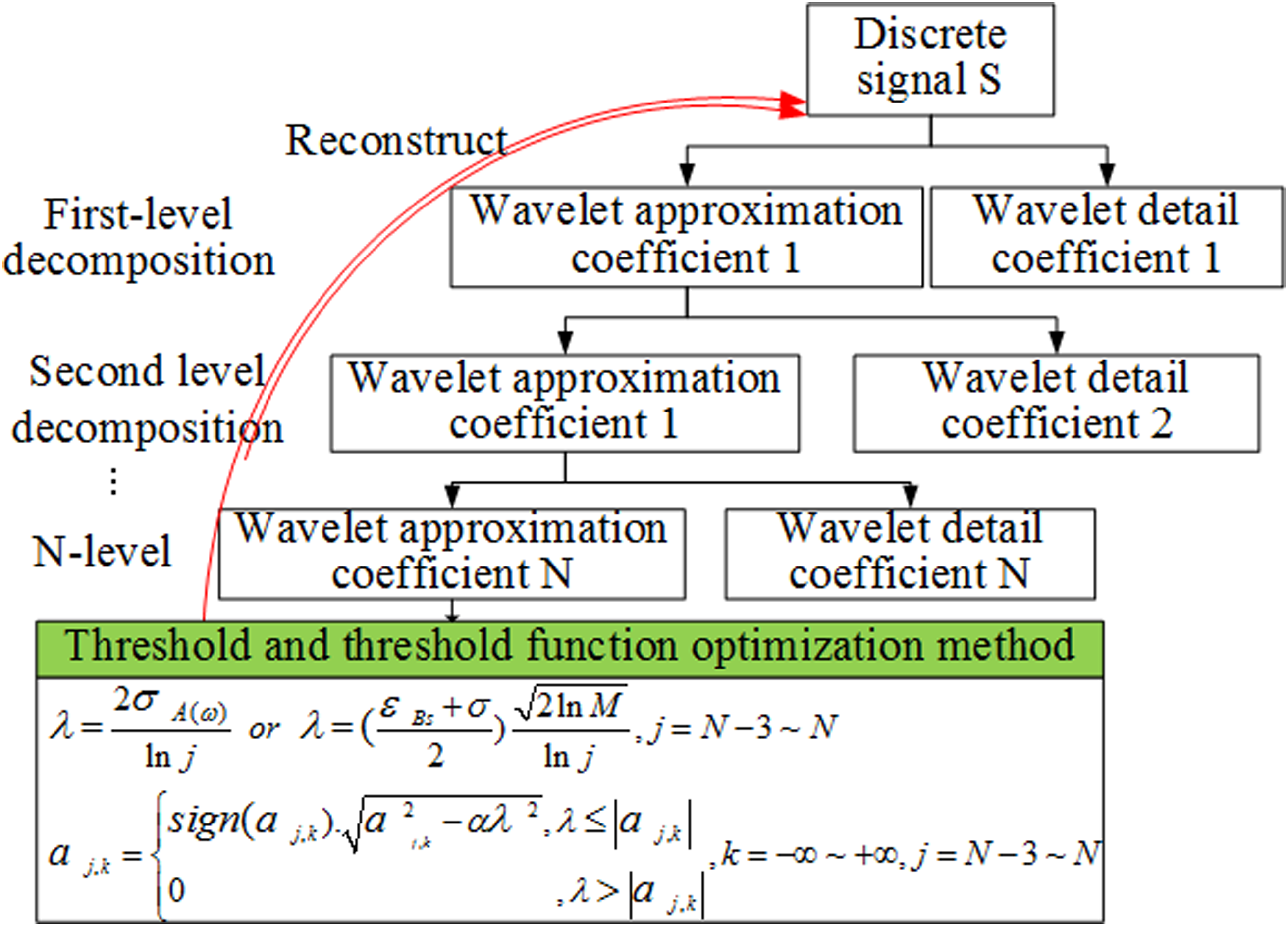
Experimental results and analysis
The velocity measurement method based on the induction loop has been described in the introduction. The relative positioning resolution based on the induction loop is 15 mm, while the positioning resolution based on the velocity measurement method of counting sleepers (VMCS) is 300 mm. Therefore, compared with VMCS, the positioning accuracy and speed measurement The accuracy is an order of magnitude higher. Therefore, comparing the results of the velocity measurement and position method based on the induction loop with the fusion velocity measurement and position method proposed in this paper can reflect the superiority of this method. At the same time, the GPS/INS integrated navigation system with high speed measurement accuracy (0.108 km/h) is used as the performance comparison system for attitude angle and velocity measurement accuracy to further verify the effectiveness of the proposed multi-information fusion method. The results are compared with the velocity measurement results of the existing velocity measurement method based on counting sleepers, which directly highlights the effectiveness of this method. The advantages of each optimization algorithm are compared through simulation analysis and static experimental analysis the engineering experiment test is shown in (Figure 10). Sensors and velocity measurement and positioning host installed on maglev trains.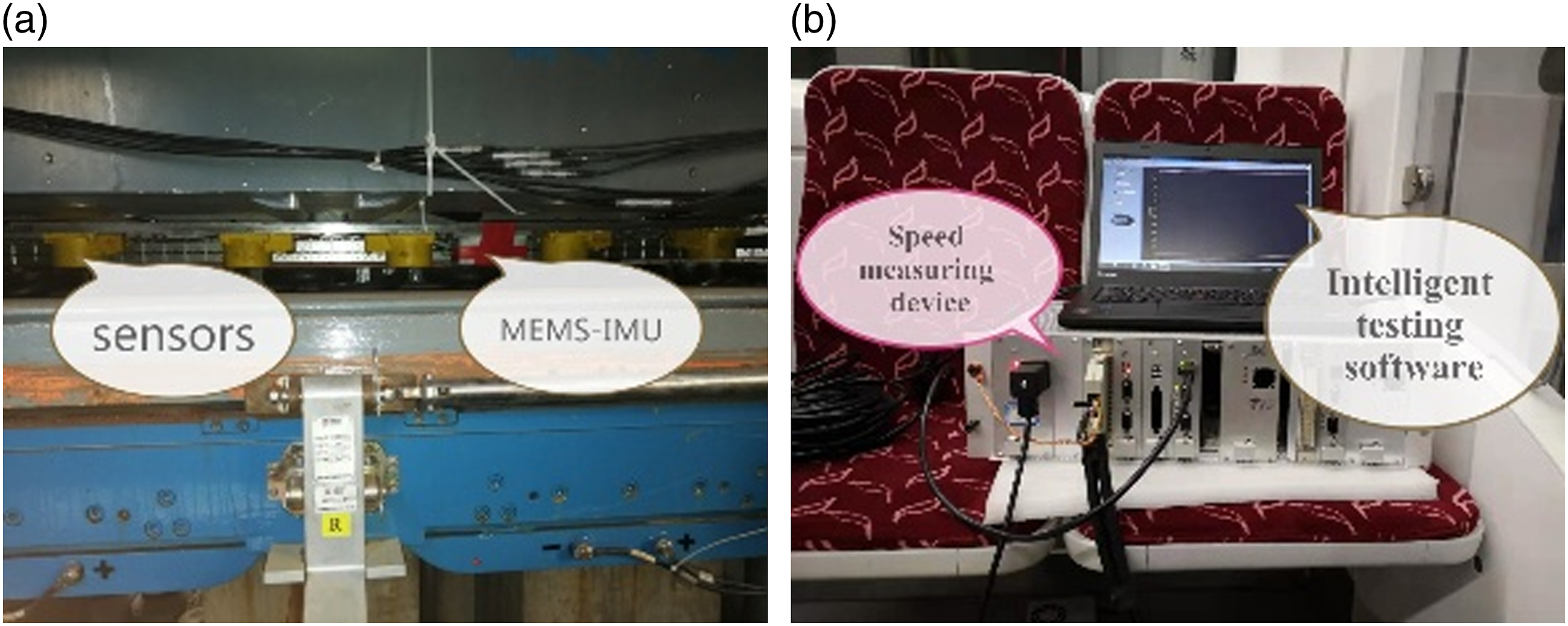
Experimental program design
The fusion velocity measurement and positioning algorithm is analyzed and verified by the experimental program combining software simulation and vehicle experiment. 1) First, use simulation computing software to verify the performance of each algorithm, and compare and analyze the processing effects of optimized algorithms and non-optimized algorithms; 2) Install the designed new fusion sensor on the bogie of the medium-speed maglev train, and install the velocity measurement host in the maglev train; 3) Carry out tracking experiments on the attitude angle, acceleration and speed of the train when the vehicle is in static floating and dynamic operation, and compare and analyze the velocity measurement results of the GPS/INS integrated navigation system and the induction loop; 4) Compare the relative positioning value with the positioning value of the medium-speed maglev vehicle based on the induction loop, and analyze the positioning accuracy of the method proposed in this article.
Analysis and comparison of simulation results
Analysis of the fusion algorithm of second-order complementary filtering and VA-MNR-UKF
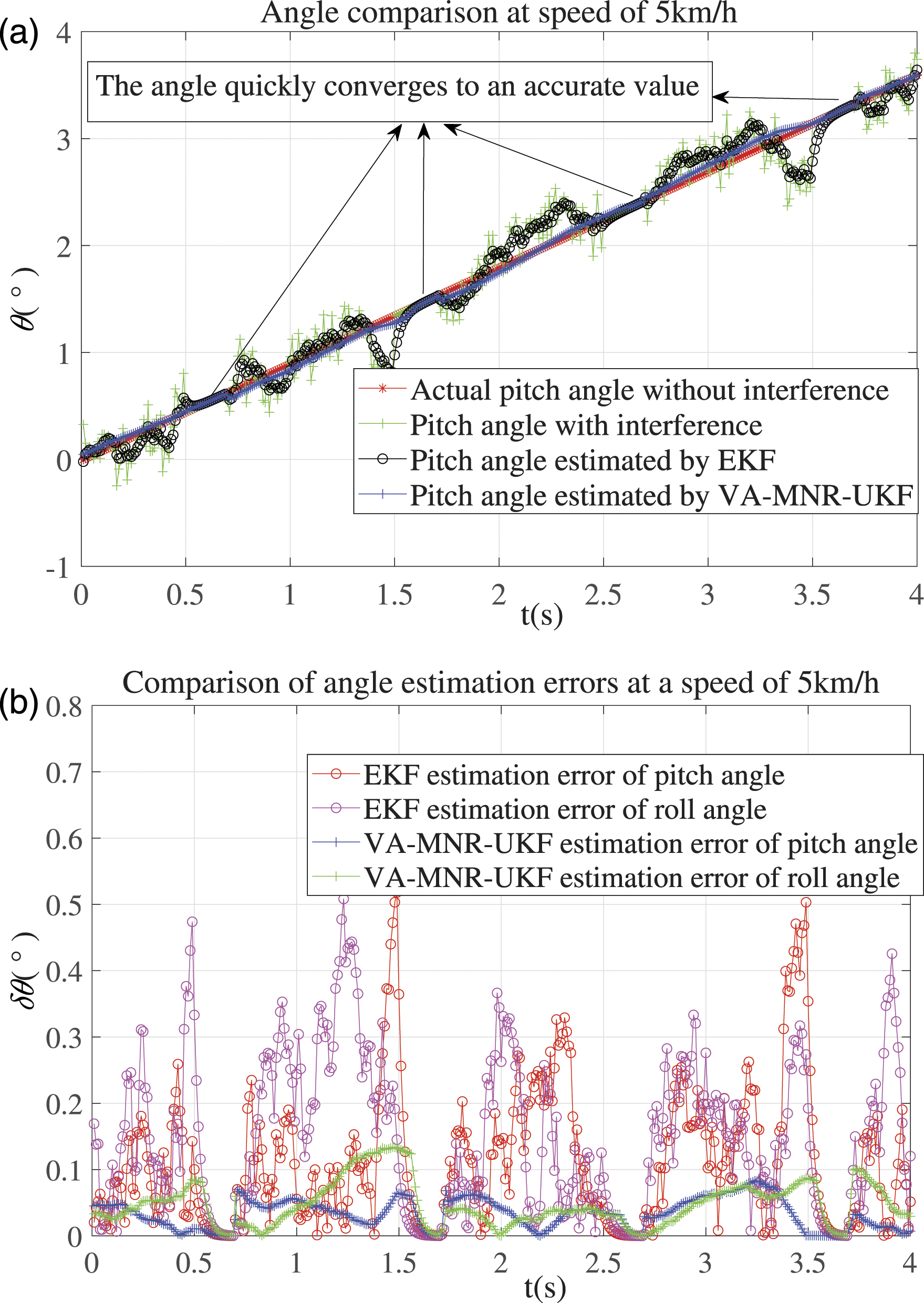
The transition time in Figure 11 is 0.5 s, and the value of r ranges from 8 to 80, which spans an order of magnitude, so the adaptability of the parameters is greatly improved. Figure 12 is the optimized velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) algorithm estimation angle and its estimation error compared with the EKF algorithm. Optimized complementary filtering algorithm based on second-order. VA-MNR-UKF algorithm based on optimization.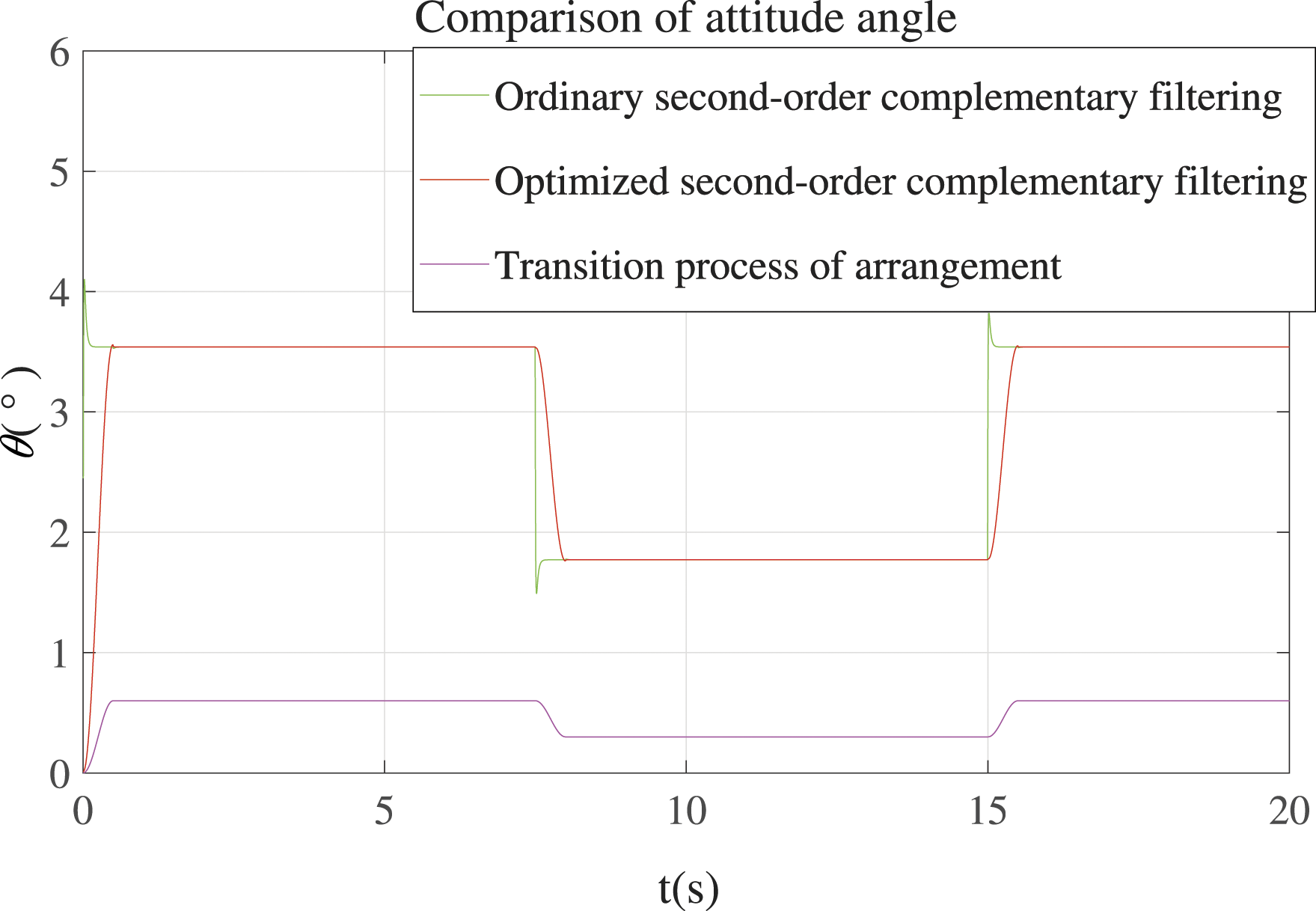
Where, the VA-MNR-UKF parameters are:
The optimized second-order complementary filter based on transition process prevents the angle that calculated by accelerometer from oscillating, and improves the stability of the signal at the input of the VA-MNR-UKF. The fusion algorithm can effectively improve the accuracy of solving nonlinear equations, and the noise reduction effect at low speed is improved by an order of magnitude, which further improves the accuracy of angle calculation.
Analysis of ML-LKF-FVMPS algorithm
Figure 13 is a simulation diagram of the acceleration fusion and correction algorithm. The simulation parameters are: the acceleration frequency is 5 Hz; the random interference is 0.1 m/s2; the acceleration given by velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) is misaligned at t = 0.5 s and at 0.7 s Back to normal. It shows that when the acceleration calculated by VA-MNR-UKF is not accurate, the fusion system can still output reliable operating acceleration. The 2 indicates that the acceleration mixed mode is selected. Allan variance curve of angular velocity of three-axis gyroscope.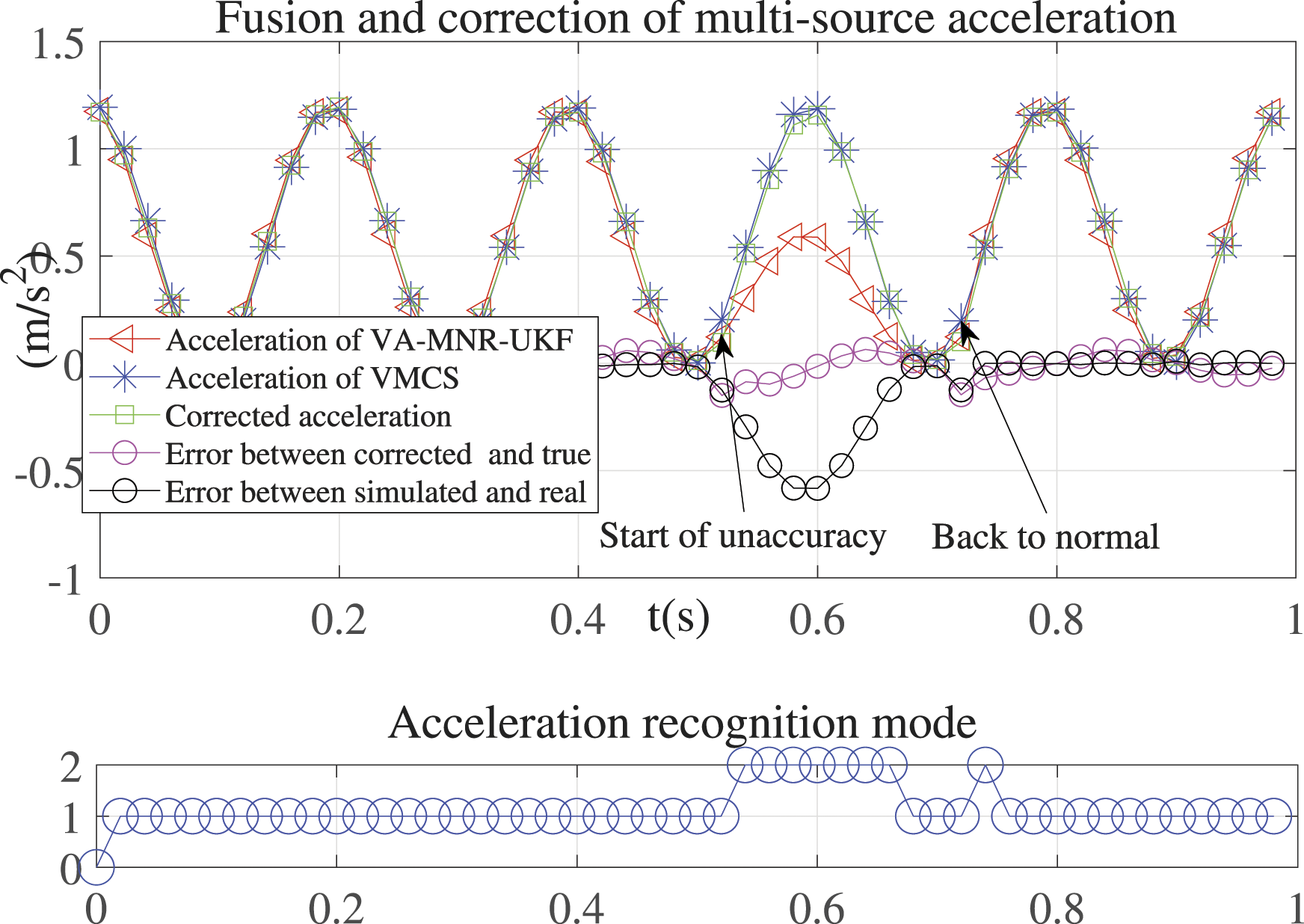
The simulation parameters of the fusion velocity measurement and positioning algorithm are: the distance between speed sensors is 0.3 m, the velocity noise is 0.14 m/s, Performance comparison chart based on fusion velocity measurement algorithm.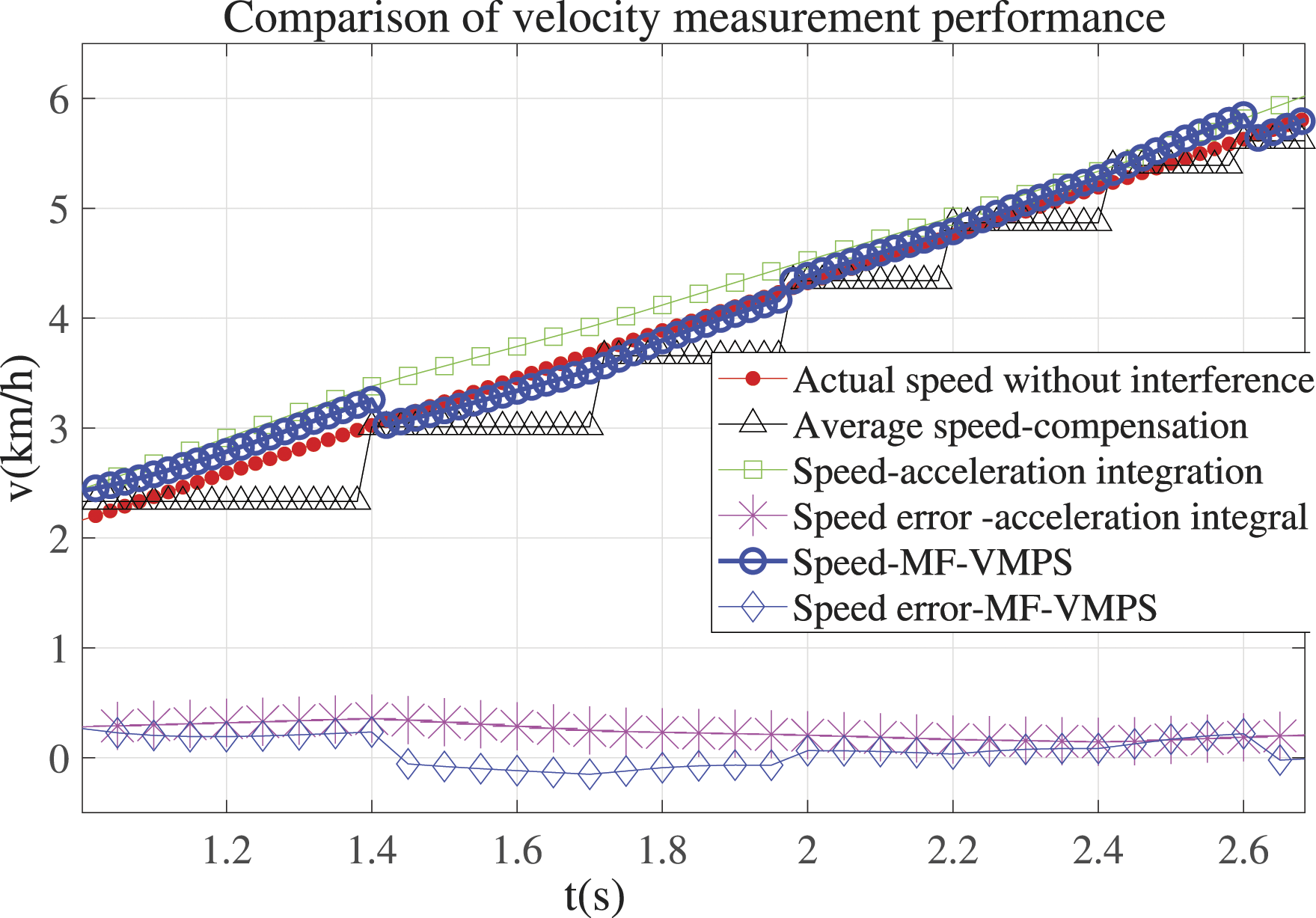
Experimental results and analysis of static suspension conditions
Experimental results and analysis of wavelet noise reduction based on threshold optimization
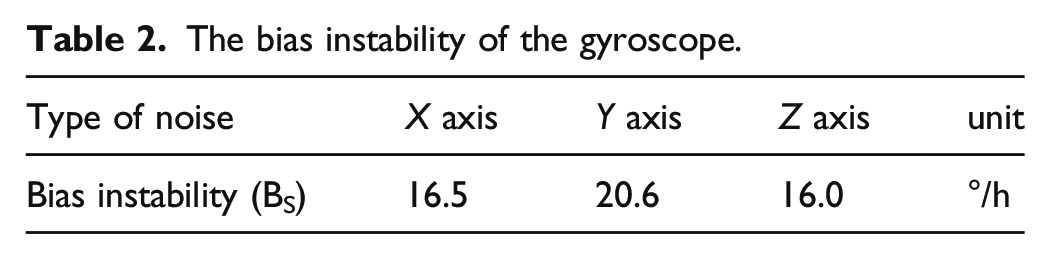
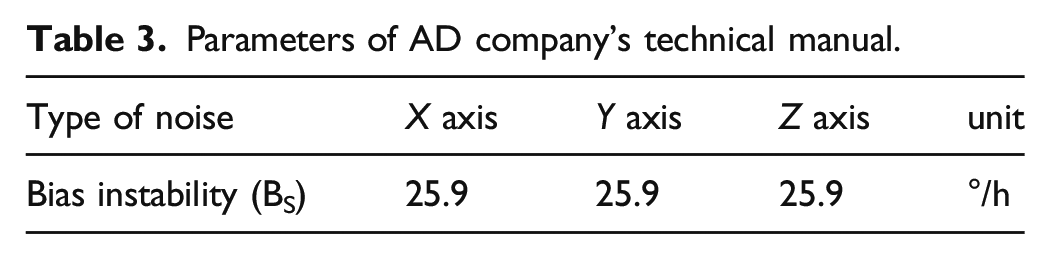
The MEMS-IMU sampling rate was set to 6.4 Hz, and the data was collected for 2 h in a suspended state and analyzed. Figure 15 is the variance curve of each parameter after Allan variance analysis, and Table 2 and 3 is the analyzed zero-bias instability parameters. It can be seen from Figure 15 that the error of the angular velocity signal of the gyroscope within a few hundred seconds is mainly caused by the instability of the offset. Allan variance curve of angular velocity of three-axis gyroscope. The bias instability of the gyroscope. Parameters of AD company’s technical manual.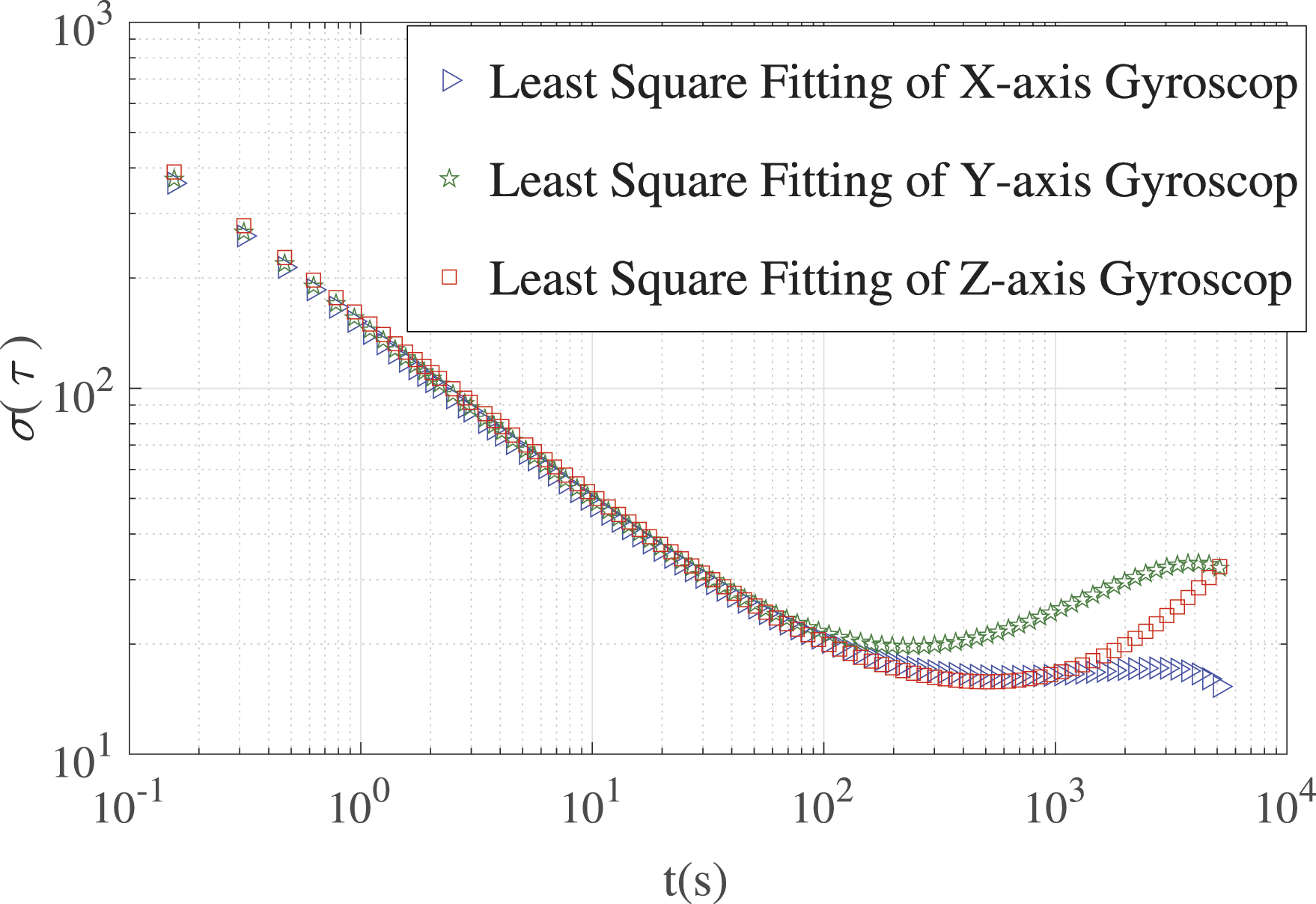
The angular velocity frequency is taken as 2 Hz. According to the sampling theorem, the sampling time for a signal with a sampling rate of 819 Hz needs to be greater than 4s. According to the wavelet transform theory and the analysis function combined with matlab, it can be known that the gyroscope signal can be decomposed by 8-layer wavelet. The experiment uses the one-dimensional Mallat algorithm. Because the angular velocity curve is similar to db4, db4 is used as the wavelet base of wavelet transforms.
26
Figure 16 shows the original signals of angular velocity in the horizontal position and static floating conditions. MEMS-IMU original signal in static suspension state.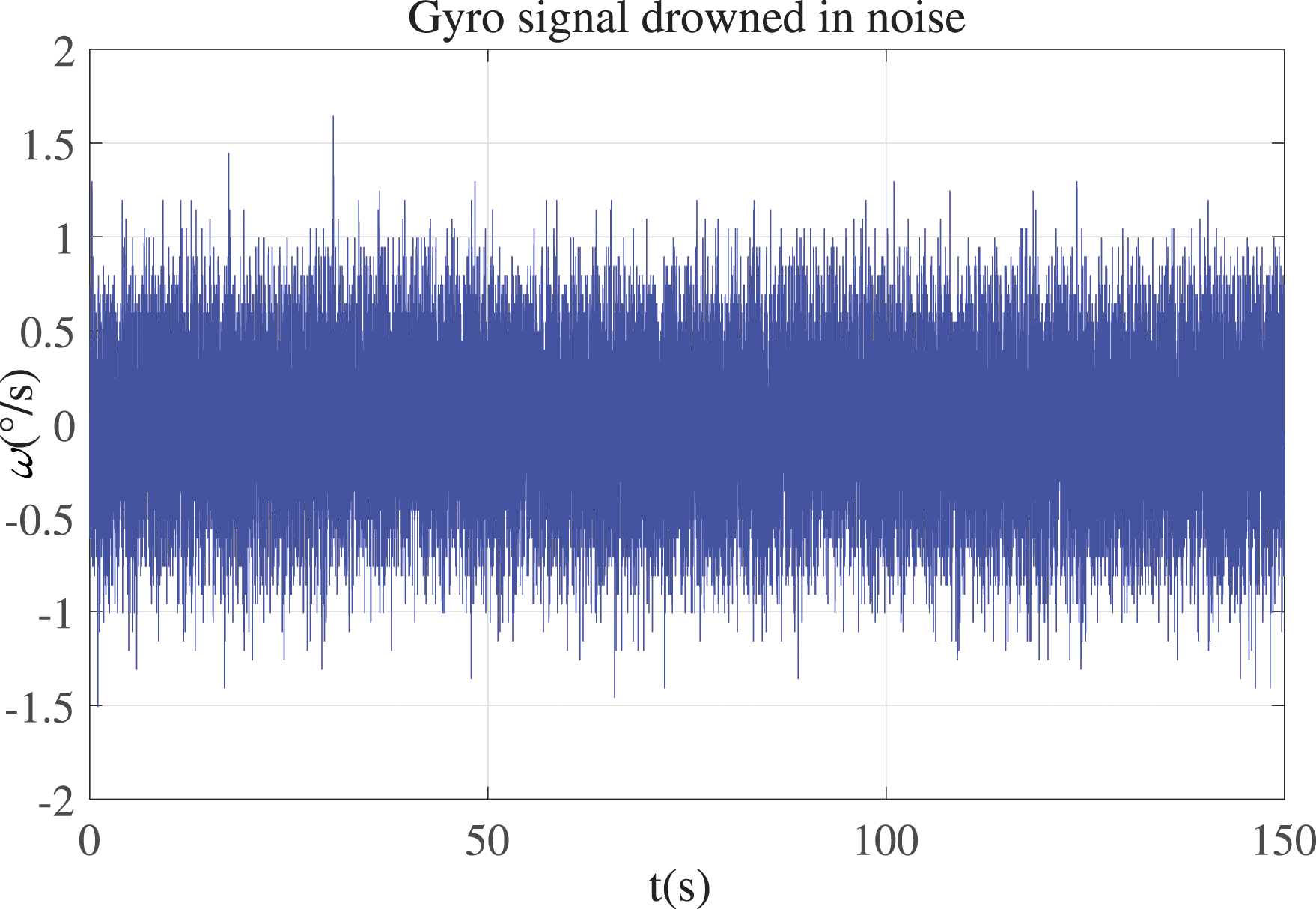
The wavelet approximation coefficients of the decomposition scale of the 8th layer are shown in Figure 17
Low-frequency wavelet coefficients of the 8th layer decomposition scale.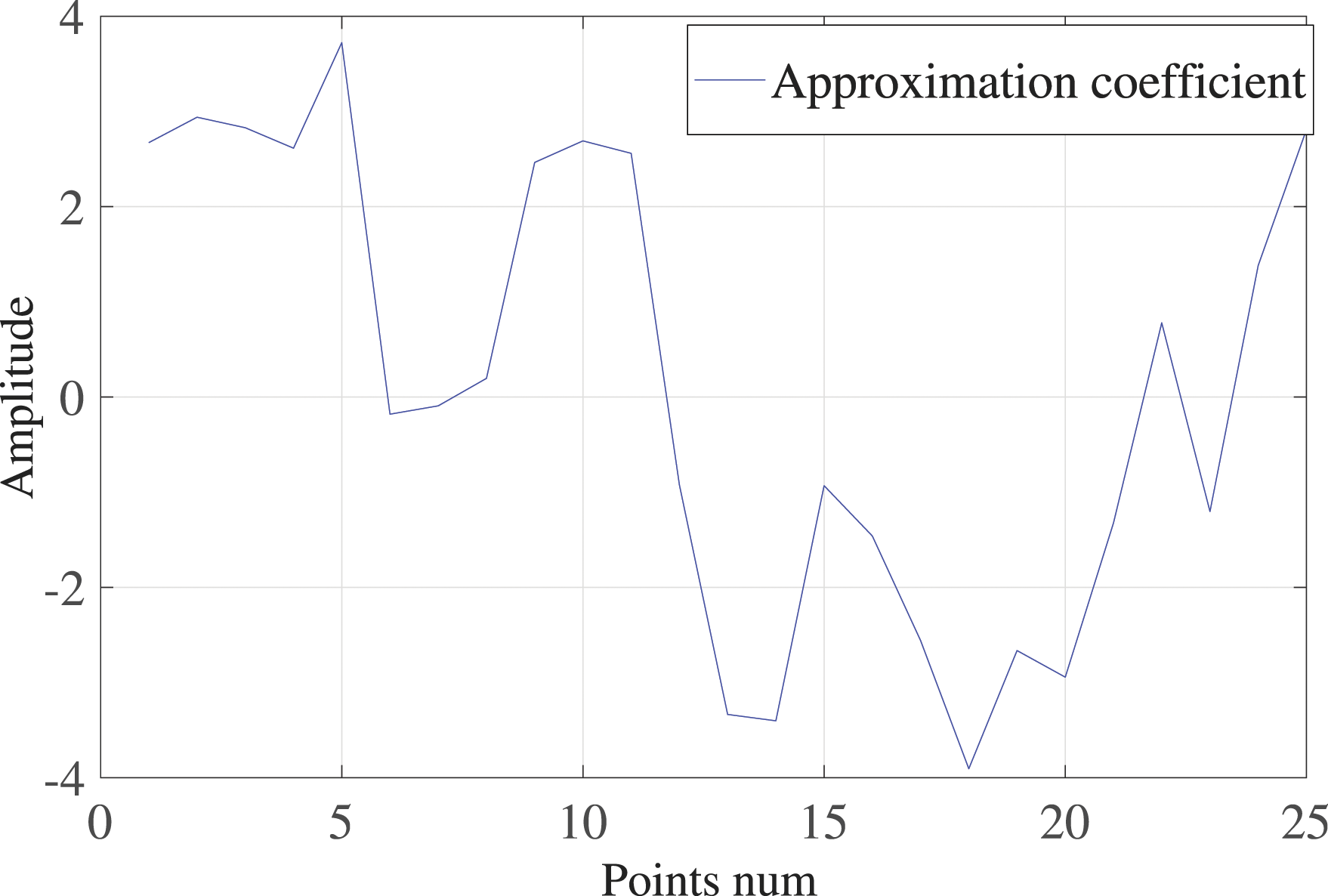
In order to analyze the performance of the wavelet noise reduction algorithm based on threshold optimization, a low-performance sensor was selected to process the data of its horizontal position and static floating conditions, and the processing effects of each algorithm were compared. The results are shown in Figures 18 and 19. The y-axis angular velocity waveform in static suspension state. The y-axis angle waveform in static suspension state.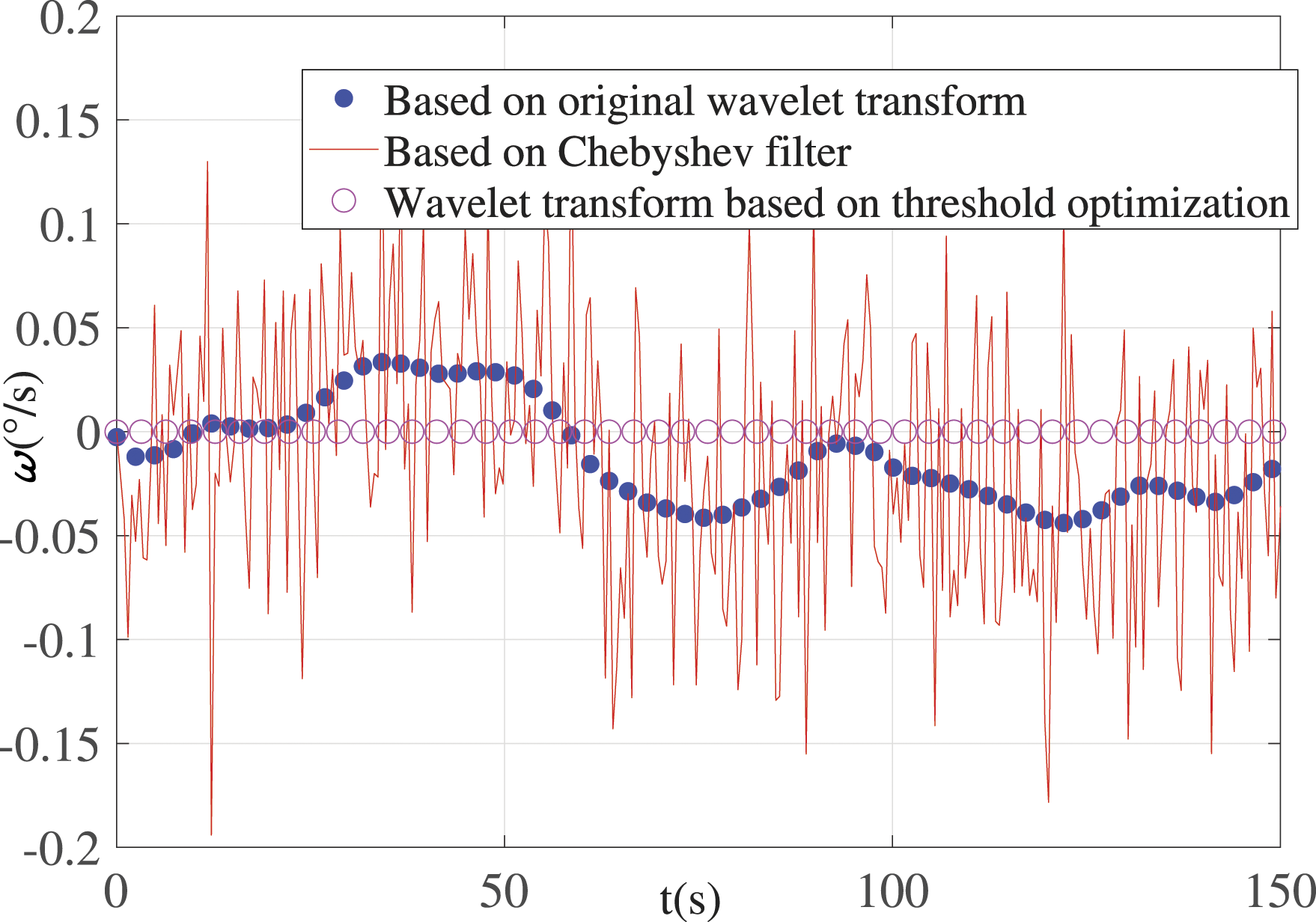
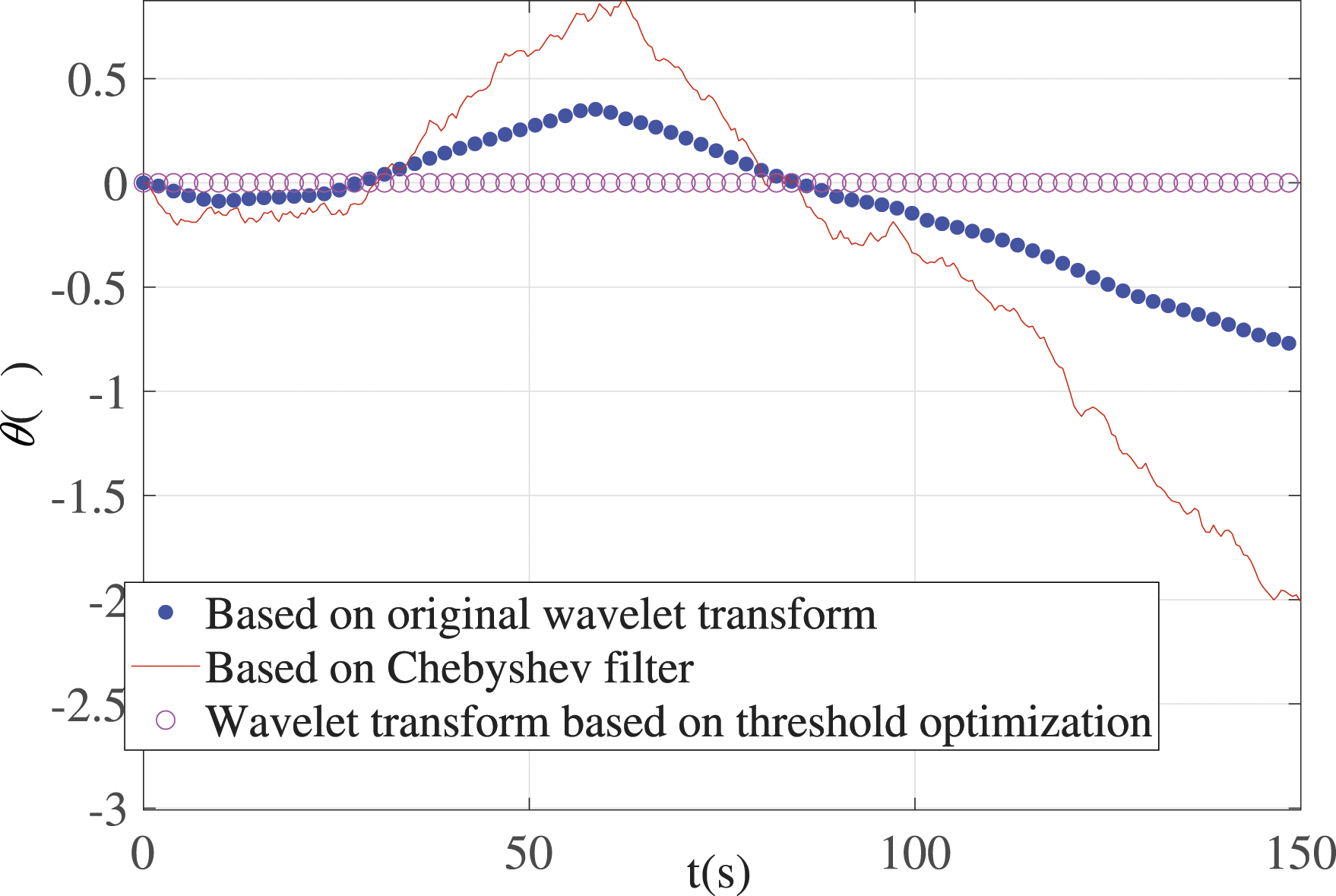
From Figures 18 and 19, it can be seen that the maximum angle of the angular velocity drift of the wavelet noise reduction algorithm optimized by the threshold is 0.05, and the integral angle is kept at zero for the length of time, which can well suppress the slow time-varying random interference; Low-frequency slow-time-varying random interference signals still exist after wavelet transform noise reduction, and the integral angle diverges to 0.85° in 150 s; The Chebyshev filtering effect is the worst, and the angle diverges to 2°; Therefore, the threshold function becomes a hard threshold when parking, and its noise reduction effect is obvious. Among them, the wavelet transform algorithm refers to the use of threshold function
Experimental results and analysis of optimized fusion algorithm of attitude calculation and velocity measurement and positioning
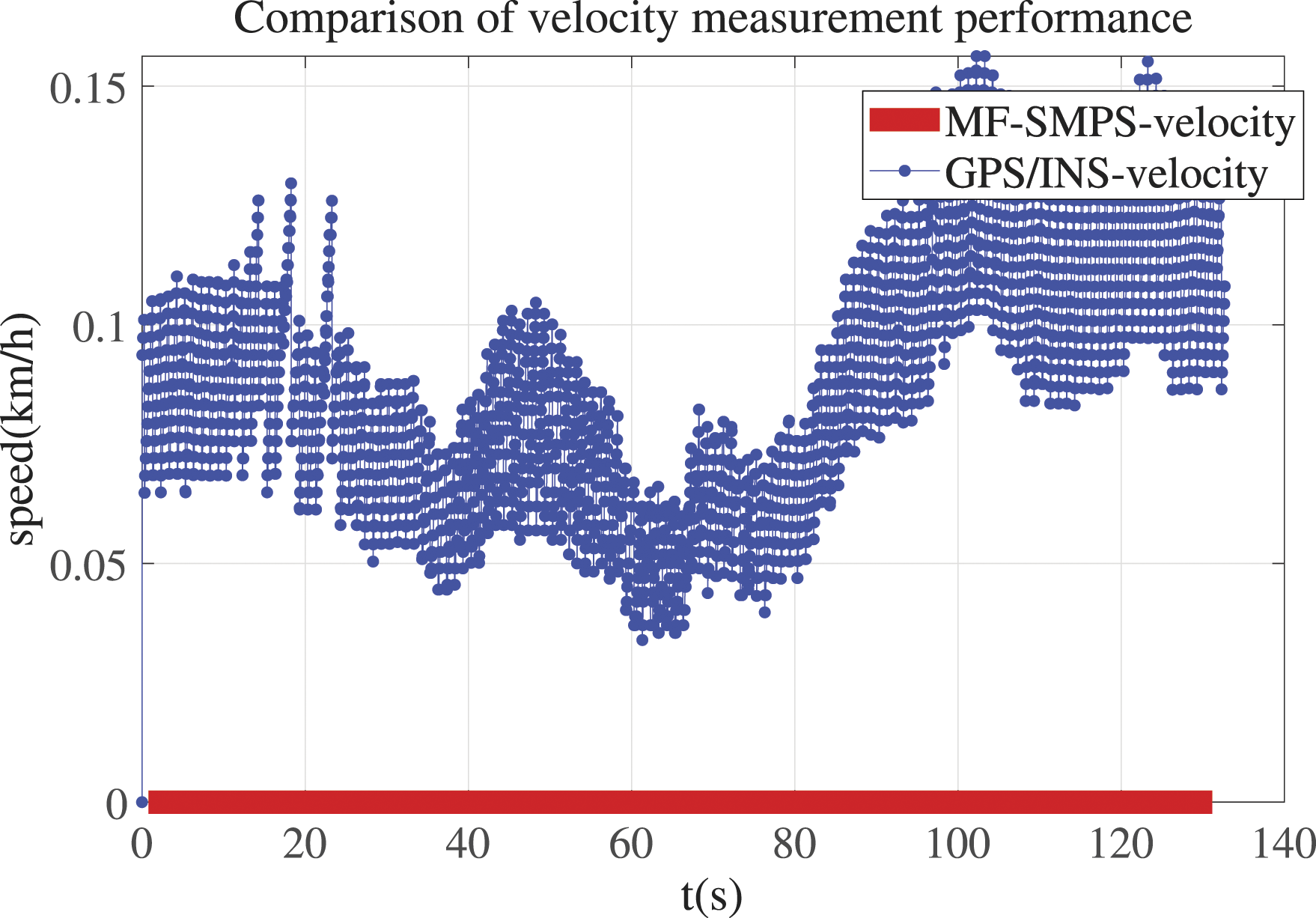
The velocity measurement positioning host adopts the fusion attitude calculation optimization algorithm based on the second-order complementary filter and velocity adaptation Unscented Kalman filter with maximum noise reduction (VA-MNR-UKF) algorithm proposed in this article, and the Fusion velocity measurement and positioning algorithm with multi-loop Kalman filter with acceleration correction and velocity accumulation error correction (ML-LKF-FVMPS) algorithm. The vehicle-mounted working condition is that the maglev vehicle floats in the warehouse for half an hour. The angle, acceleration and speed sent by the speed measurement host are collected in real time through Ethernet communication. The experimental results are shown in Figures 20 and 21. It can be seen that the acceleration and speed of the train mentioned in this article are always zero, and the maximum fluctuation angle of the pitch angle is 0.09°. The angle divergence problem caused by long time integration is solved. The GPS/INS system’s attitude angle and velocity have fluctuations of 0.2° and 0.15 km/h, respectively. Horizontal position and static suspension state in the garage. Velocity of maglev trains in static suspension state in the garage.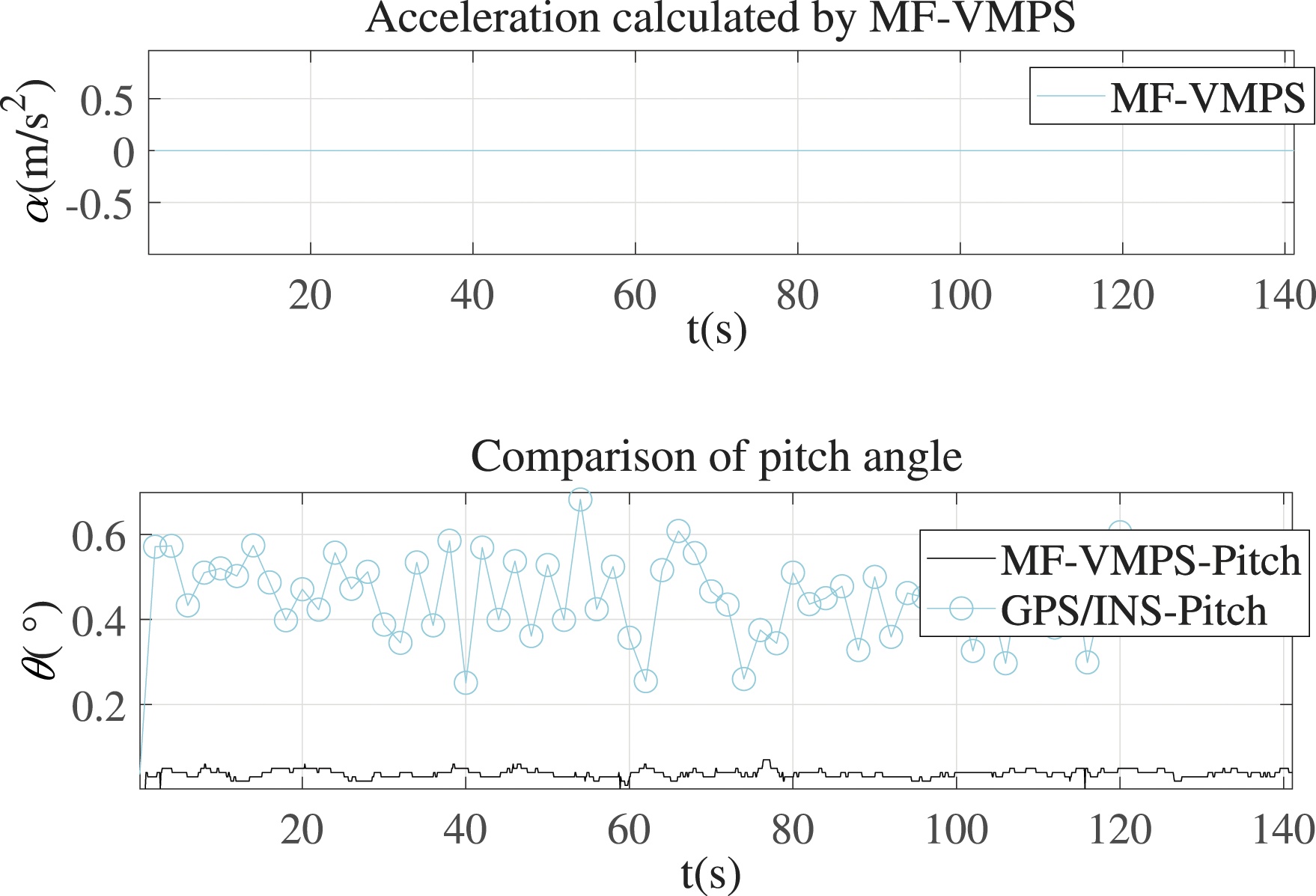
Experimental results and analysis of dynamic operation of maglev train
The designed fusion velocity measurement and positioning system is installed on a medium-speed maglev train. The train is equipped with an induction loop velocity measurement and positioning system and a GPS/INS system is installed. The test line is 204 m long, with garages, flat sections, climbing and bends, and has all the working conditions for the performance verification of the velocity measurement and positioning system. On the condition that the GPS satellite signal is intact, the vehicle dynamic operation test is carried out, and the data given by the fusion system, GPS/INS system and its induction loop line are recorded respectively. The experimental results are shown in Figures 22–24 respectively. It can be seen that when there is a large acceleration and deceleration, the maximum pitch angle deviation is 0.32°, and other conditions are less than 0.08°. It needs to point out that GPS/INS is isolated by air springs, and the damping effect is much better than that of MEMS-IMU on the bogie.
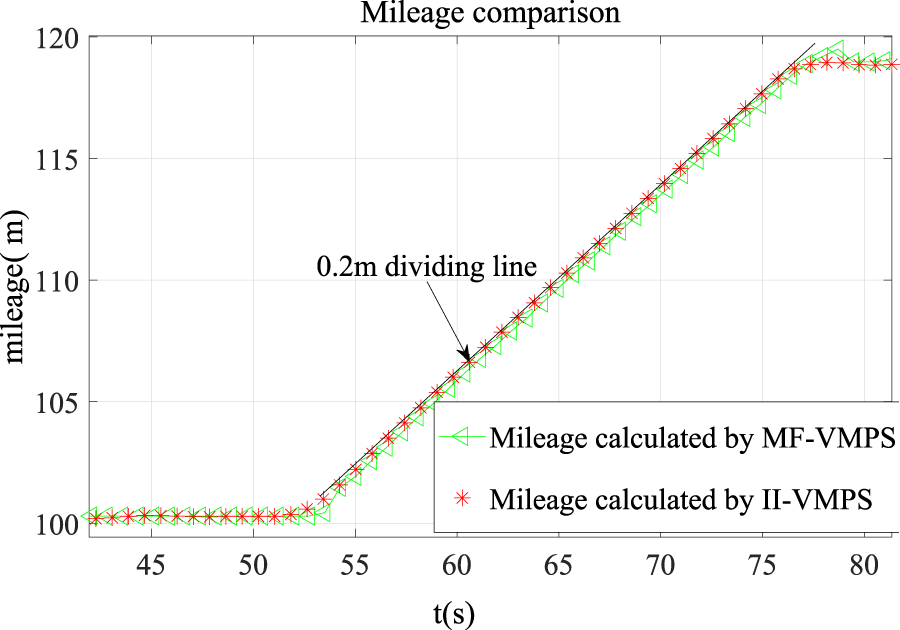
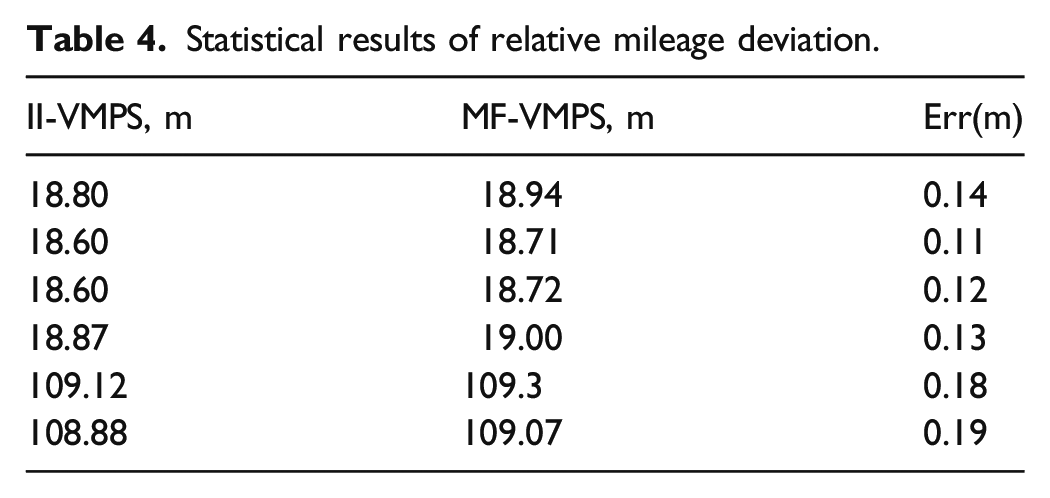
Where, II-VMPS is a velocity measurement and positioning system based on an induction loop with a relative positioning resolution of 15 mm. The velocity measurement method of counting sleepers (VMCS) is a velocity measurement system based on counting sleepers. Comparison and deviation of pitch angle. Velocity comparison and deviation of maglev train. Relative positioning (Mileage) comparison charts.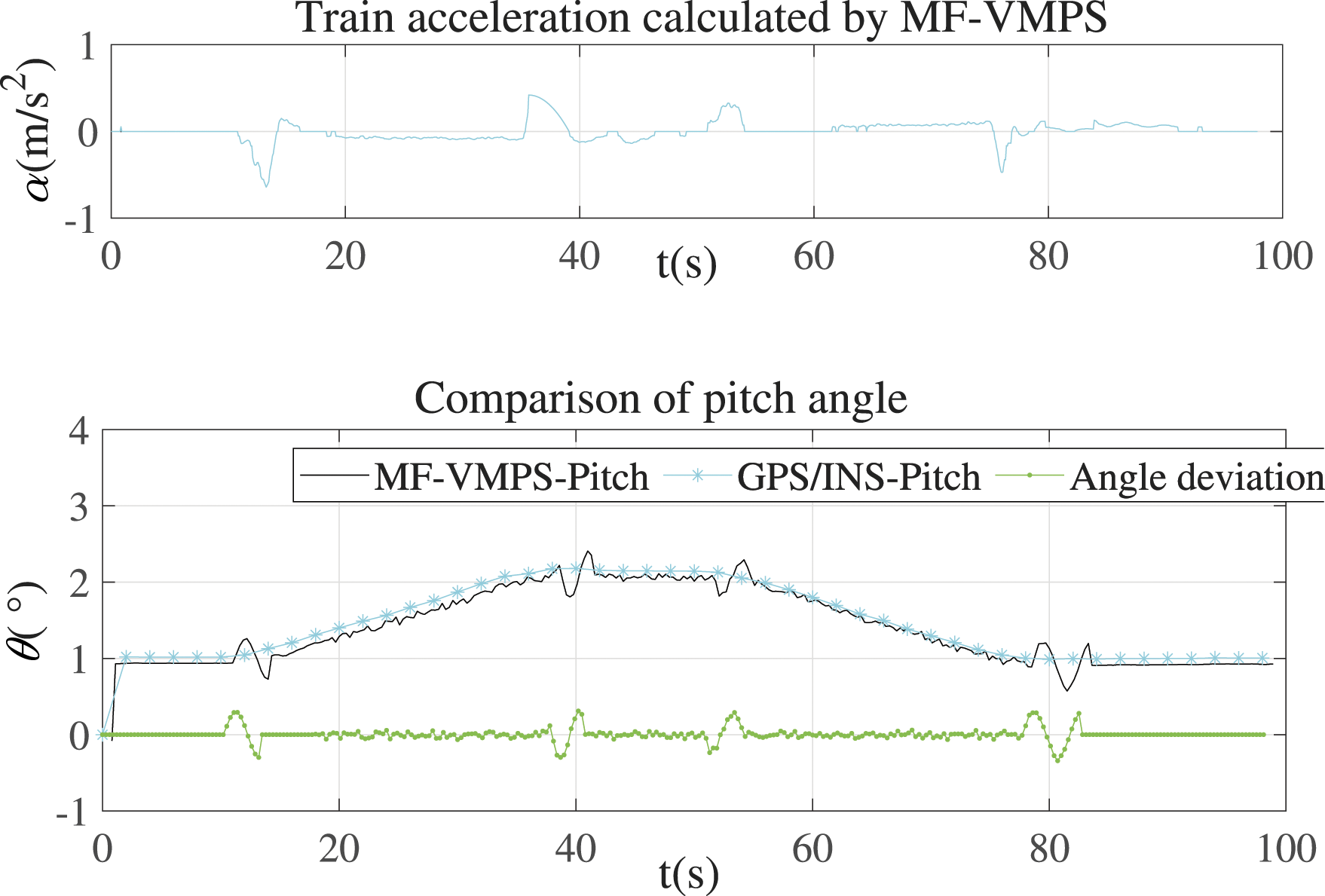
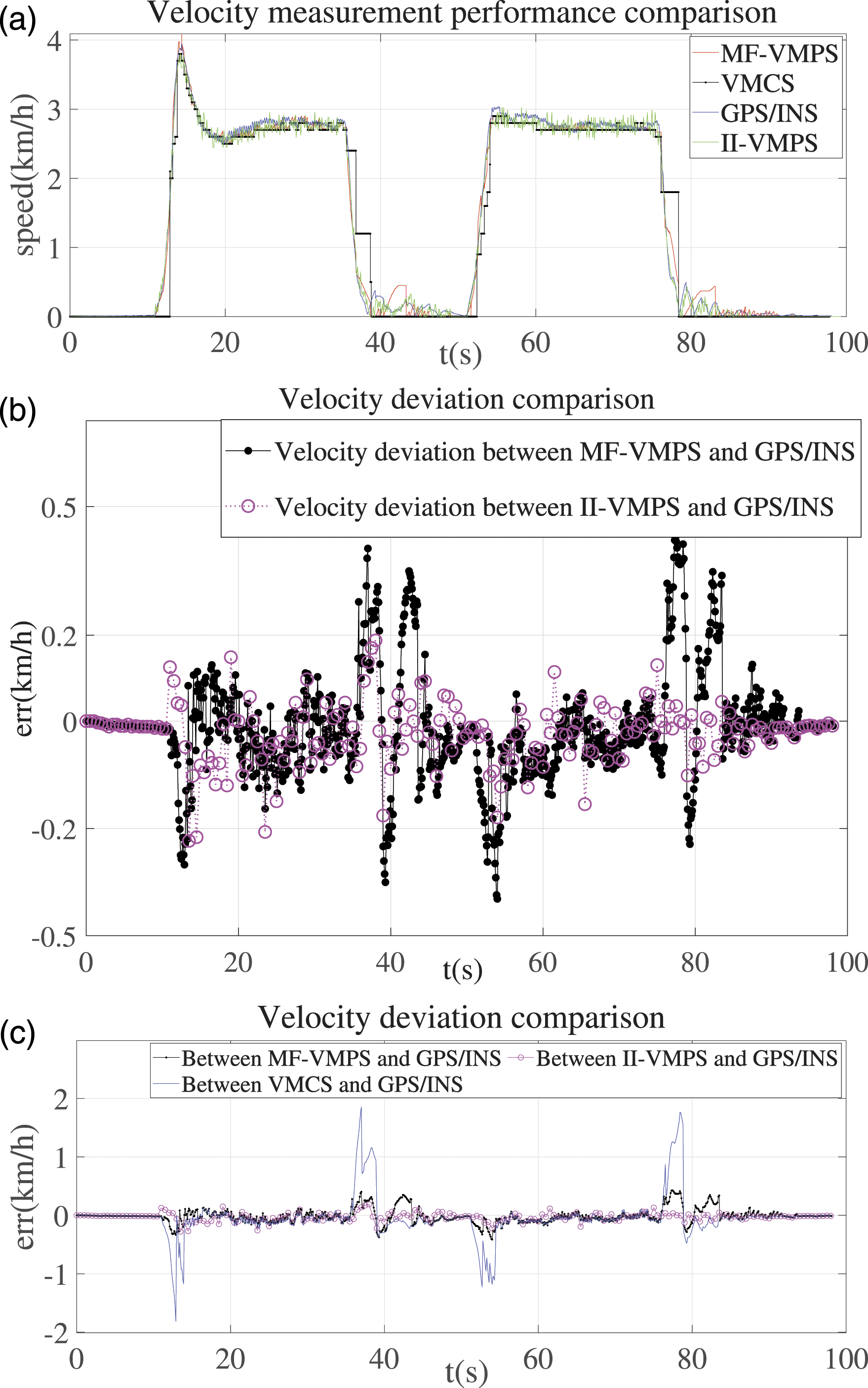
It can be seen from Figure 23 that the velocity measurement accuracy of this fusion velocity measurement positioning system in the uniform speed section is better than that of the induction loop, and the maximum deviation in the acceleration section is less than 0.43 km/h. Since the velocity measurement accuracy of the GPS/INS integrated navigation system is 0.108 km/h, it shows that the velocity measurement accuracy of the fusion system has reached the level of 0.5 km/h. Compared with the speed error of 2 km/h of the velocity measurement system based on counting sleepers, the velocity measurement accuracy is increased one order of magnitude.
Conclusion
On the basis of the method of multi-sensor information fusion, this paper firstly proposes a posture solution method combining the second-order complementary filter based on the transition process and the velocity adaptation Unscented Kalman filter with maximum noise reduction. Compared with the UKF-based filter, the filtering effect in the low-speed stage is improved, and the defect of the contradiction between the dynamics and the filtering accuracy of the UKF nonlinear prediction is solved. Compared with the second-order complementary filter, it avoids the high dynamic oscillation problem and solves the problem of parameter adjustment. Secondly, the wavelet noise reduction algorithm based on threshold optimization is used to weaken the random error of the zero bias instability, the angle accumulation error is further reduced, and the performance of the gyroscope is improved. And innovatively proposed a multi-loop Kalman filter fusion velocity measurement and positioning algorithm with acceleration fusion correction and velocity accumulation error correction, which solved the colored noise interference caused by suspension fluctuations and weakened the velocity accumulation error.
According to the simulation comparative analysis and the results of vehicle engineering test, the attitude angle and acceleration remain zero for a long time in the static floating garage, and the maximum deviations of pitch angle, velocity and relative positioning are 0.32°, 0.43 km/h and 0.19 m respectively, which improved the accuracy of velocity measurement and positioning of maglev train. Compared with the velocity measurement method based on counting sleepers, the velocity measurement accuracy in the low velocity stage is improved by an order of magnitude, which is comparable to the velocity measurement accuracy based on the induction loop and GPS/INS with high precision. Therefore, it is of great significance to reduce the switching velocity of the electric brake and the mechanical brake. So it improves the engineering adaptability of the medium and low speed maglev velocity measurement and positioning system to a certain extent, and reduces the maintenance cost.
Footnotes
Declaration of conflicting interests
The author(s) declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Funding
The author(s) disclosed receipt of the following financial support for the research, authorship, and/or publication of this article: This work was supported by the 13th Five-Year National Key R&D Program of China under Grant 2016YFB1200600. This research work is grateful to the teachers of the Maglev Engineering Research Center and the support of engineers such as Changchen Jiang, JinSong Yang and Wentao Xia, and thanks to the support of Beijing Maglev Transportation Development Co., Ltd and CRRC TANGSHAN CO., LTD.